
Union and Intersection Operators for Thick Ellipsoid State Enclosures: Application to Bounded-Error Discrete-Time State Observer Design



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Thick Ellipsoids
3. Union and Intersection of Thick Ellipsoid Enclosures
3.1. Mapping of Thick Ellipsoidal Domains via (Quasi-)Linear System Models
3.1.1. Outer Bounds
3.1.2. Inner Bounds
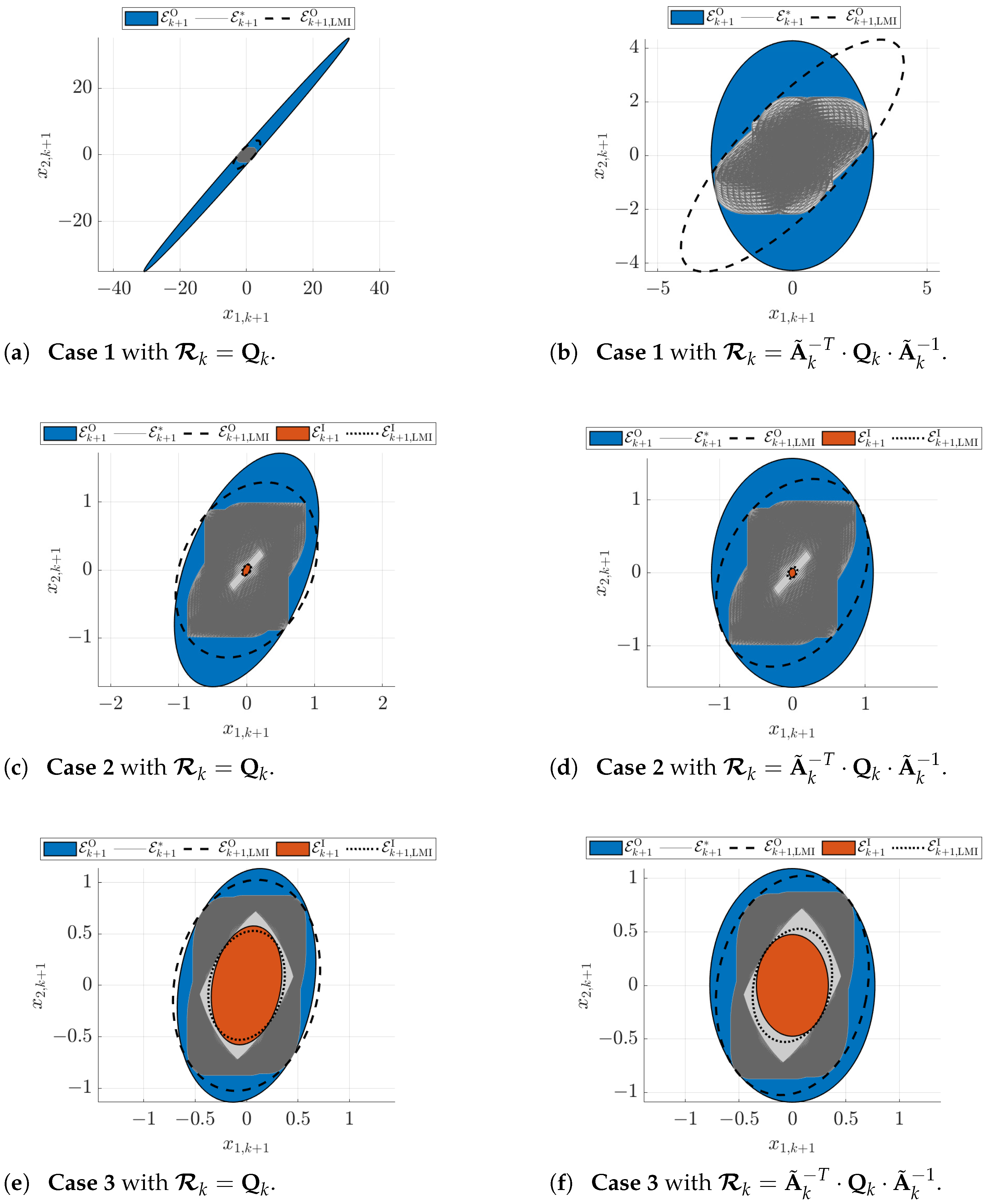
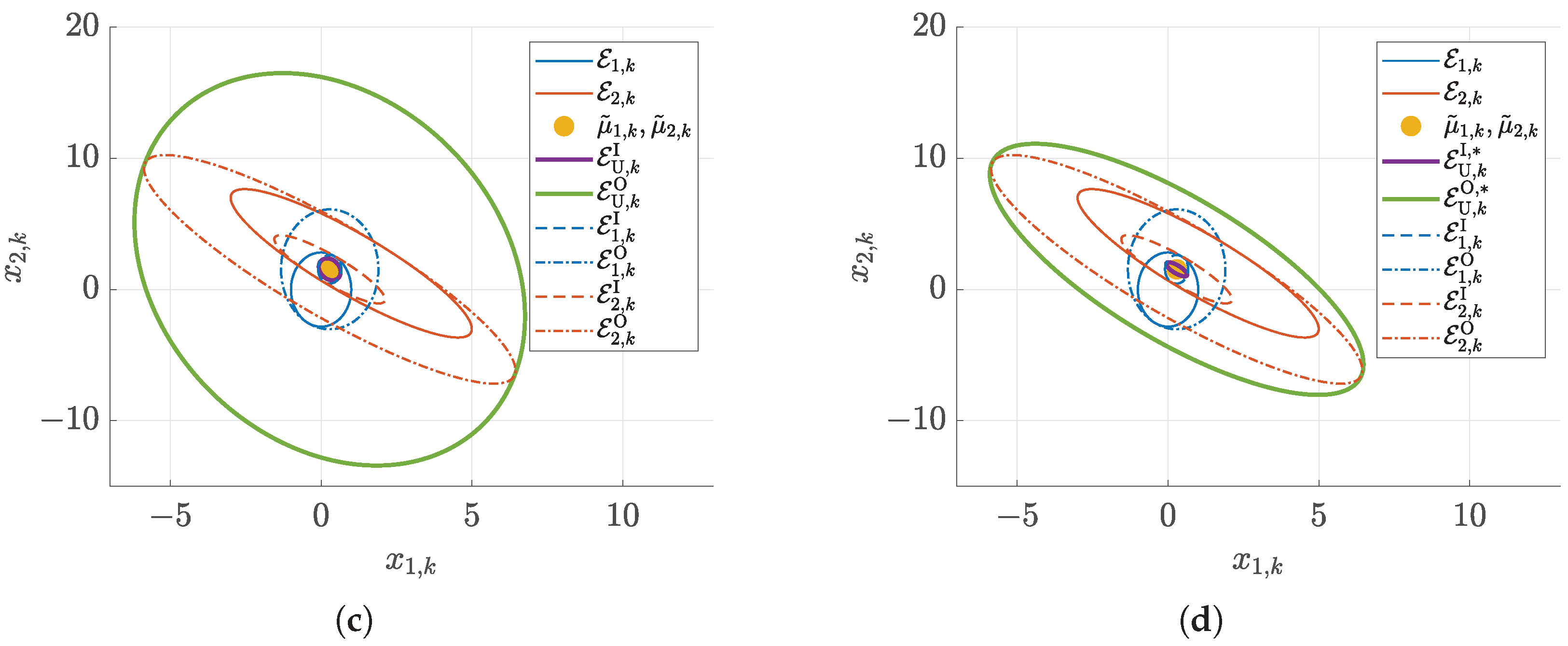
3.1.3. Illustrating Example
- case 1
- , ;
- case 2
- , ;
- case 3
- , .
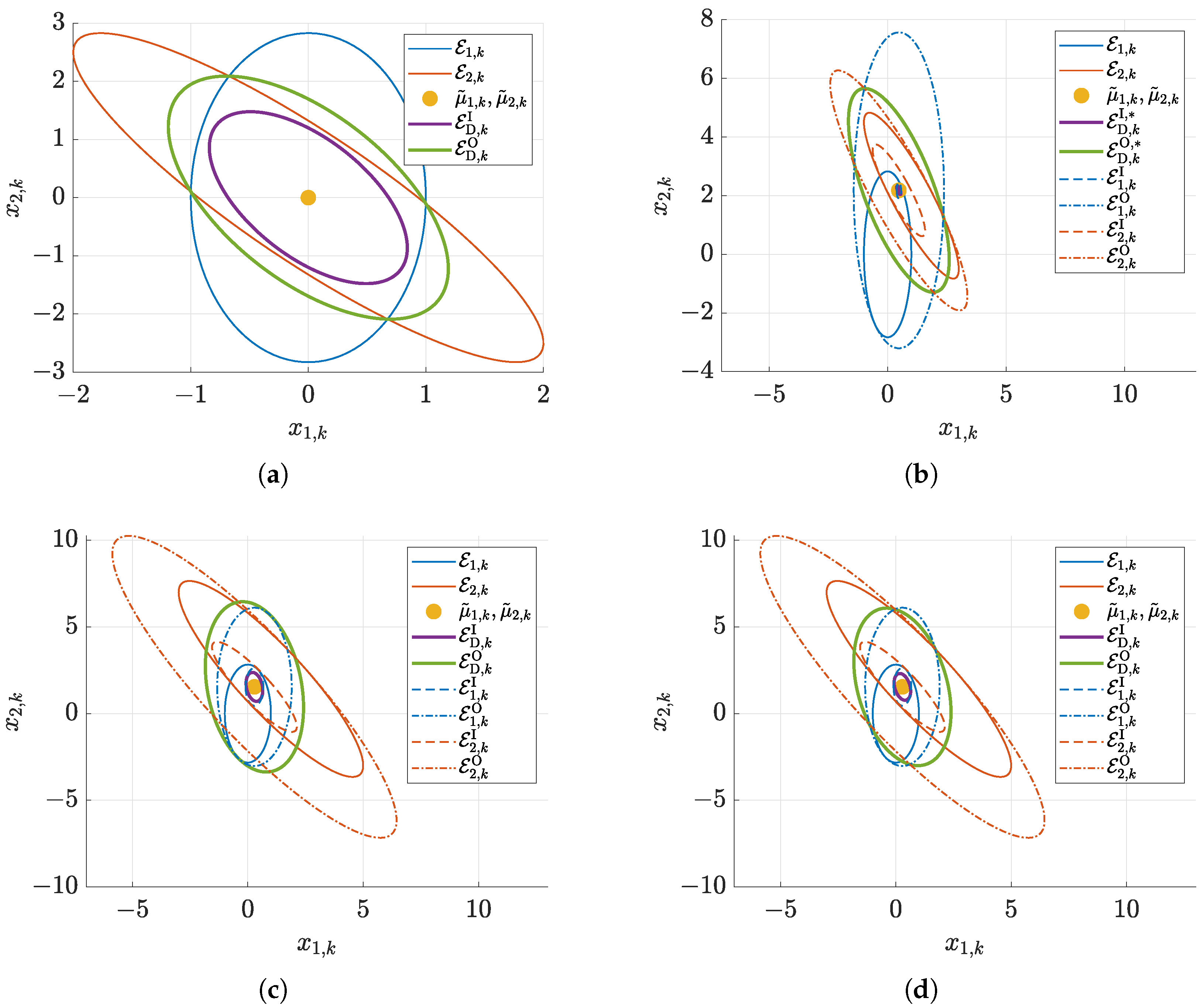
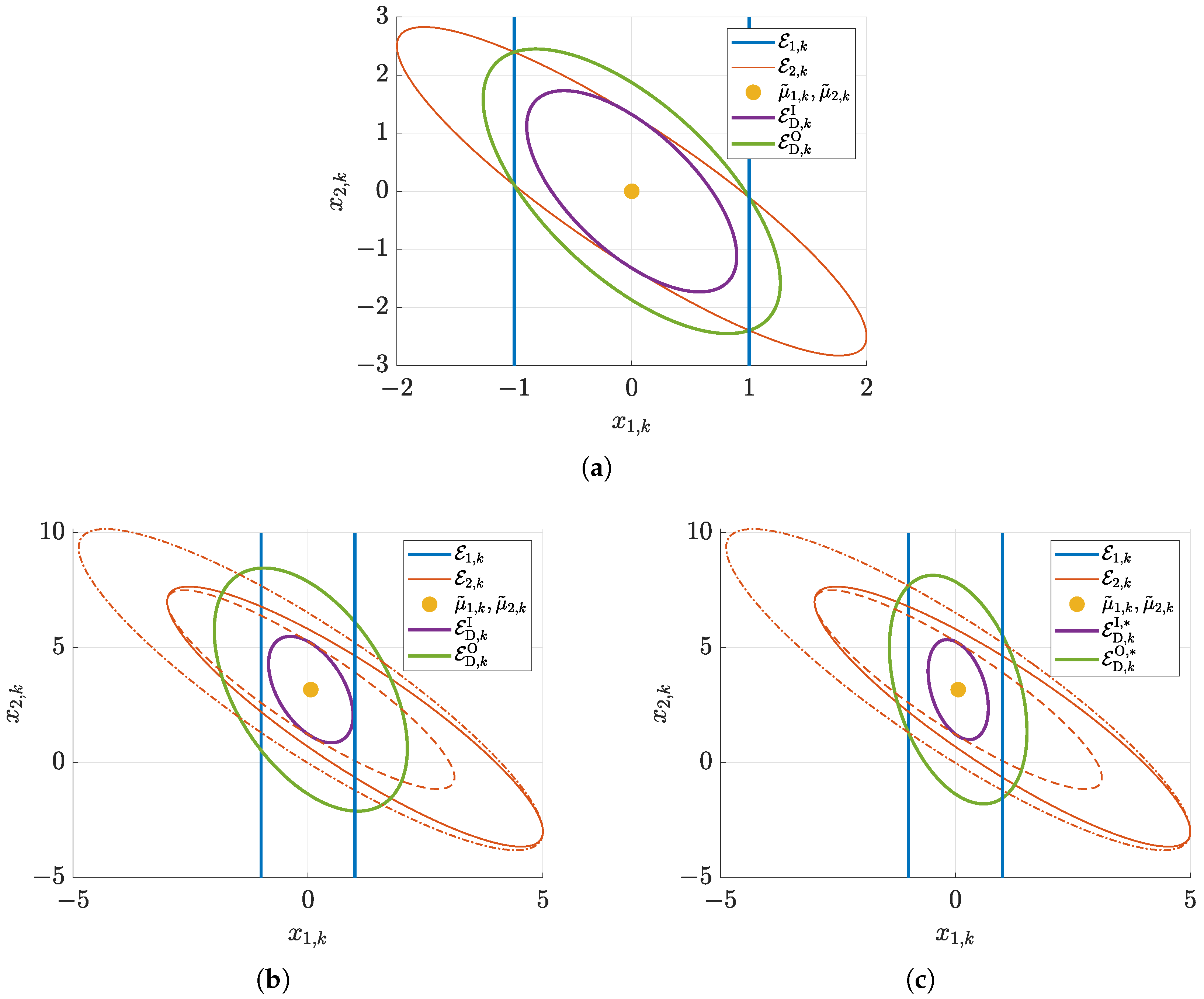
3.2. Dikin Ellipsoids for the Intersection of Ellipsoids
3.2.1. Intersection of Ellipsoids with Identical Midpoints
3.2.2. Generalization to the Intersection of Ellipsoids with Different Midpoints
- Step 1
- Determine the common center point for the desired inner and outer bounds of the intersection that must be included in all ellipsoids to be intersected;
- Step 2
- Determine initial approximations of the shape matrices for the inner and outer bounds according to Section 3.2.1;
- Step 3
- For non-empty inner bounds, correct the outer enclosure so that the inner and outer ellipsoid surfaces become parallel to each other and, thus, form a thick ellipsoid .
- Step 3*
- As an alternative to Step 3, the initial outer enclosure remains fixed and the inner ellipsoid surface is adapted to become parallel to each other to form a thick ellipsoid .
3.2.3. Illustrating Example
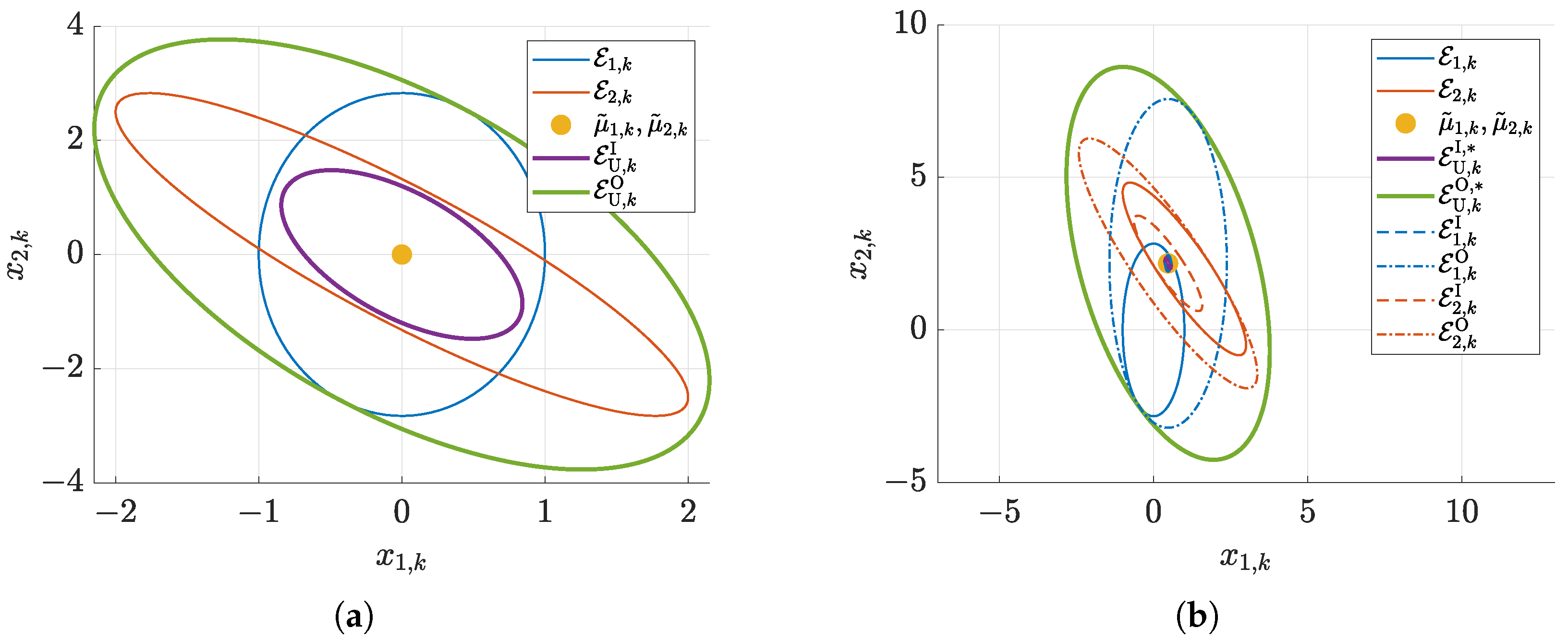
3.3. Thick Ellipsoid Union of Two Ellipsoids with Different Midpoints
3.3.1. General Solution Procedure
3.3.2. Illustrating Example
4. Thick Ellipsoid State Estimation Algorithm
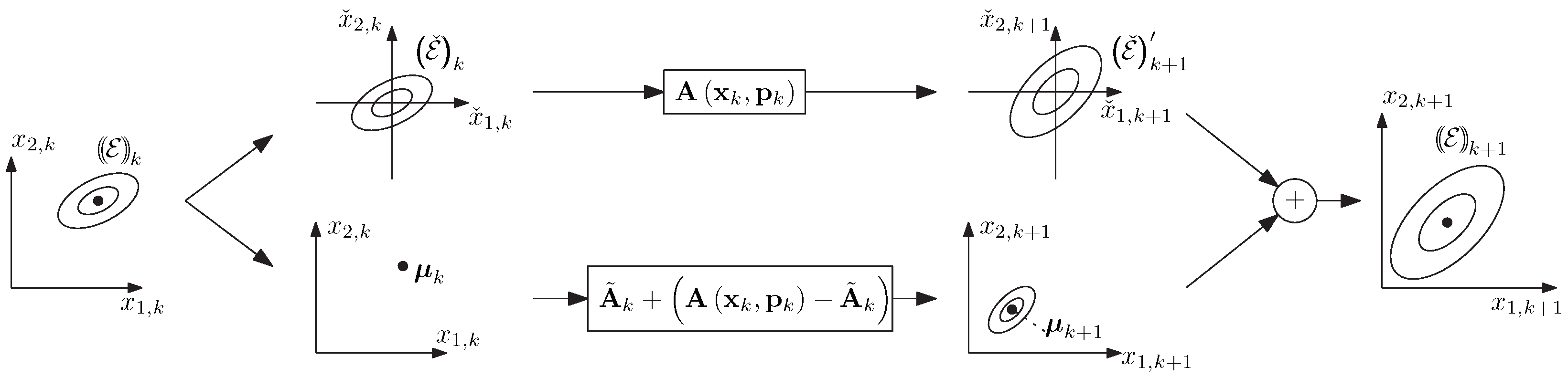
4.1. Thick Ellipsoid Prediction Step
- Propagate the inner bound of the thick ellipsoid (68) and extract the inner hull of the image set that is obtained by applying the mappingDenote the corresponding shape matrix of the inner ellipsoid by . This matrix is related to the shape matrix in Equation (25) by
- Compute the updated ellipsoid midpoint as
- Finally, determine the predicted thick ellipsoid setwhere
4.2. Thick Ellipsoid Correction Step
- Determine the inner shape matrix on the basis of Equation (47) according towhere (based on the change of the ellipsoids’ midpoint positions according to (43)) from (75) is the inner bound of the previous prediction; characterizes the measurement uncertainty (possibly given in terms of a degenerate ellipsoid).
- Finally, Equation (49) yields the thick Dikin ellipsoid as the result of the measurement-based correction step.
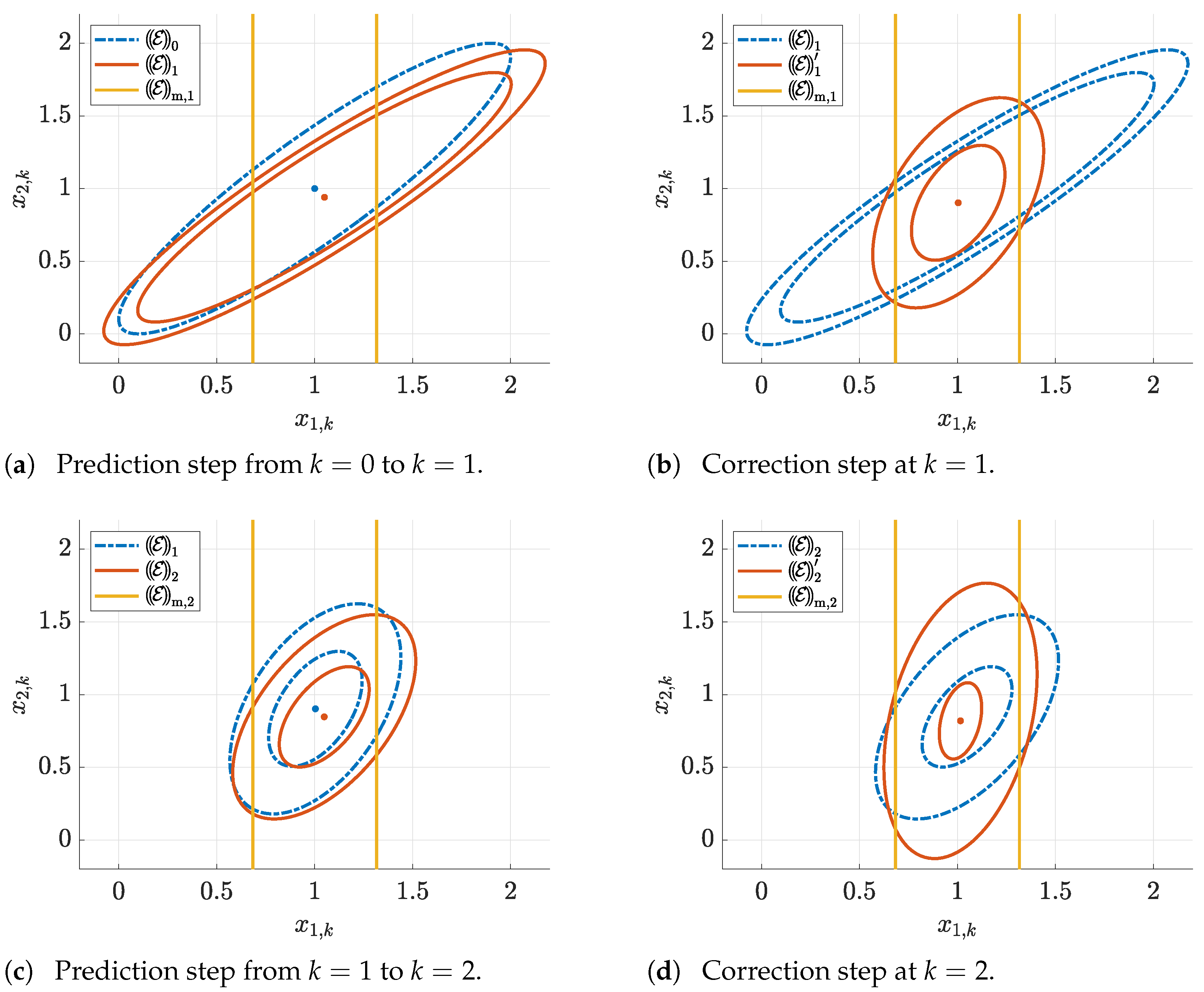
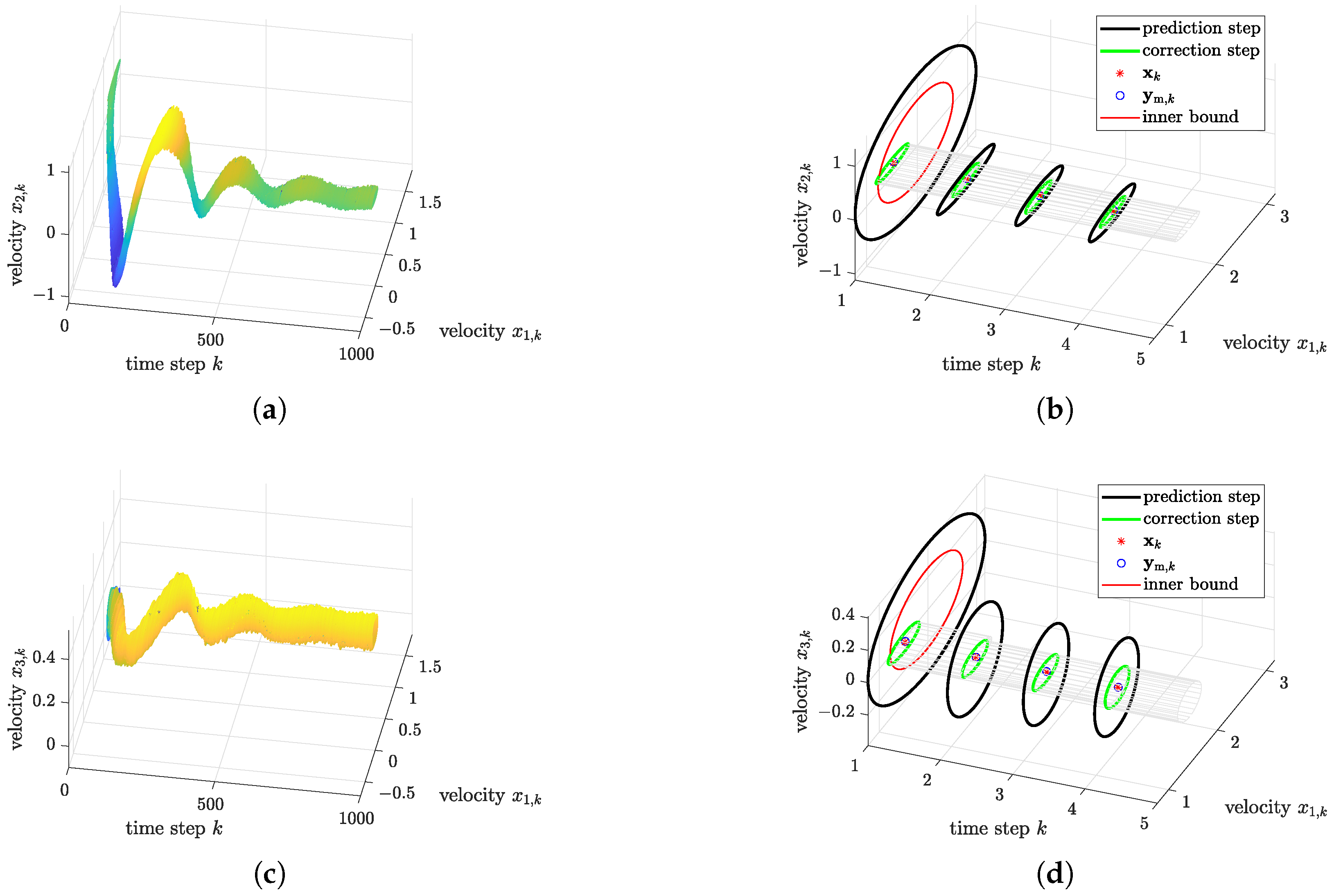
4.3. Visualization of the Thick Ellipsoid State Estimation Procedure
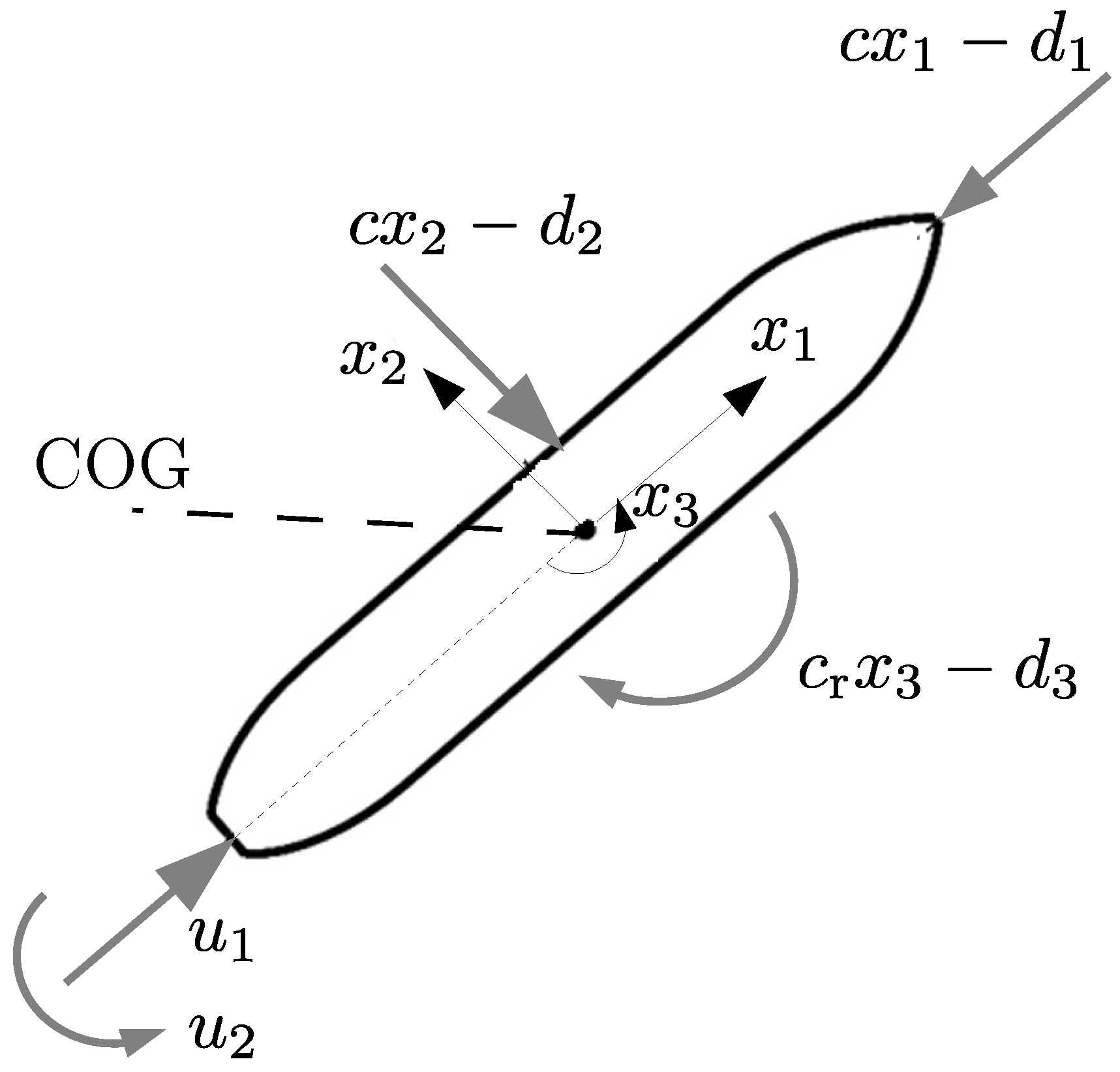
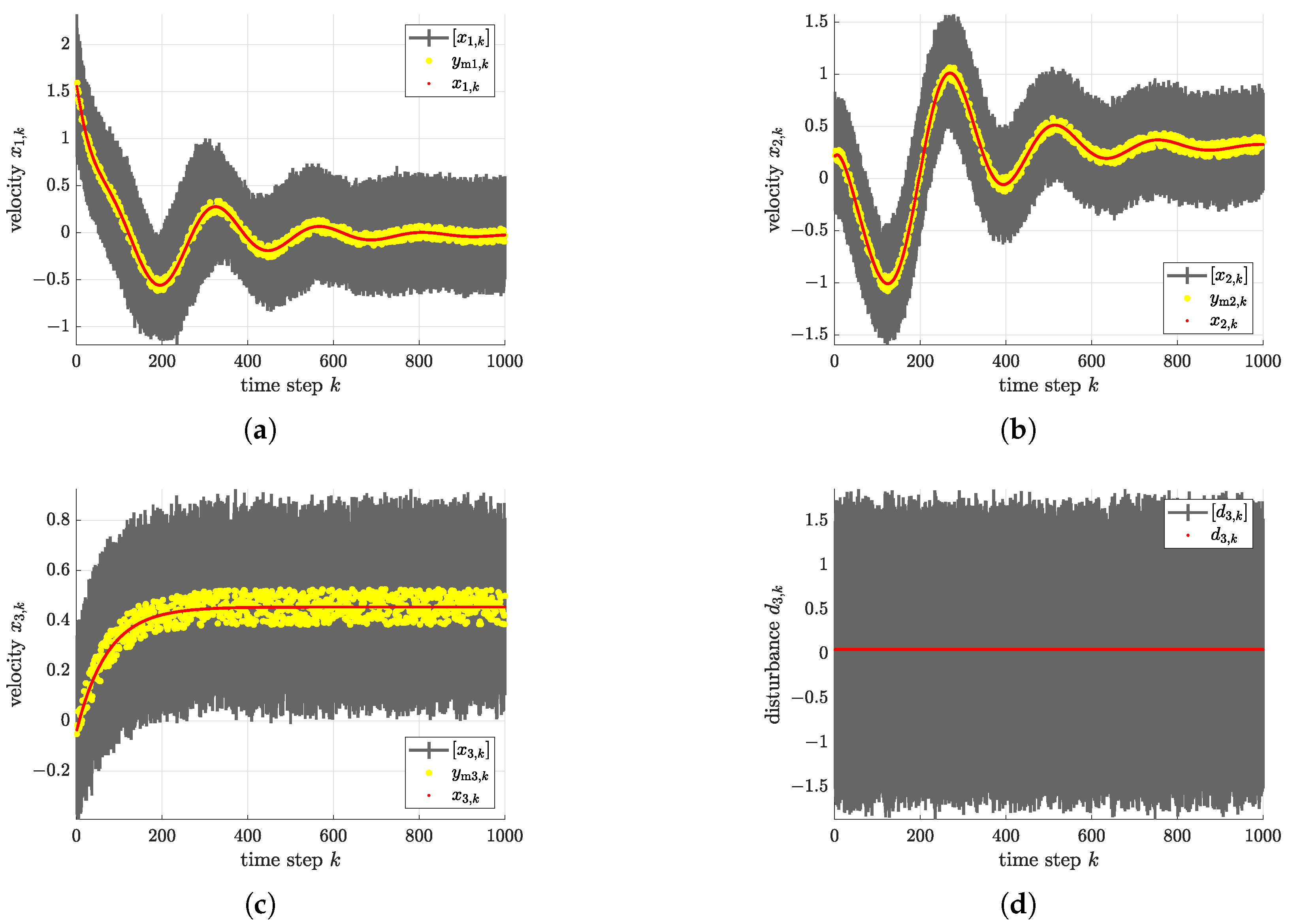
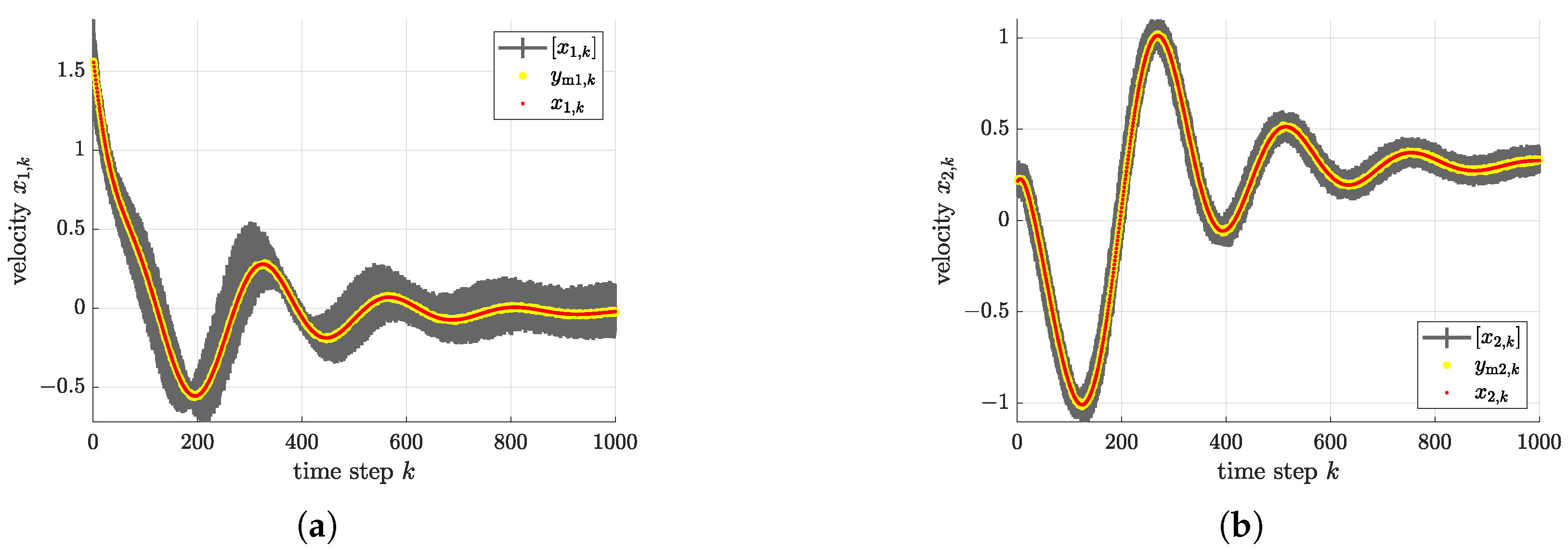
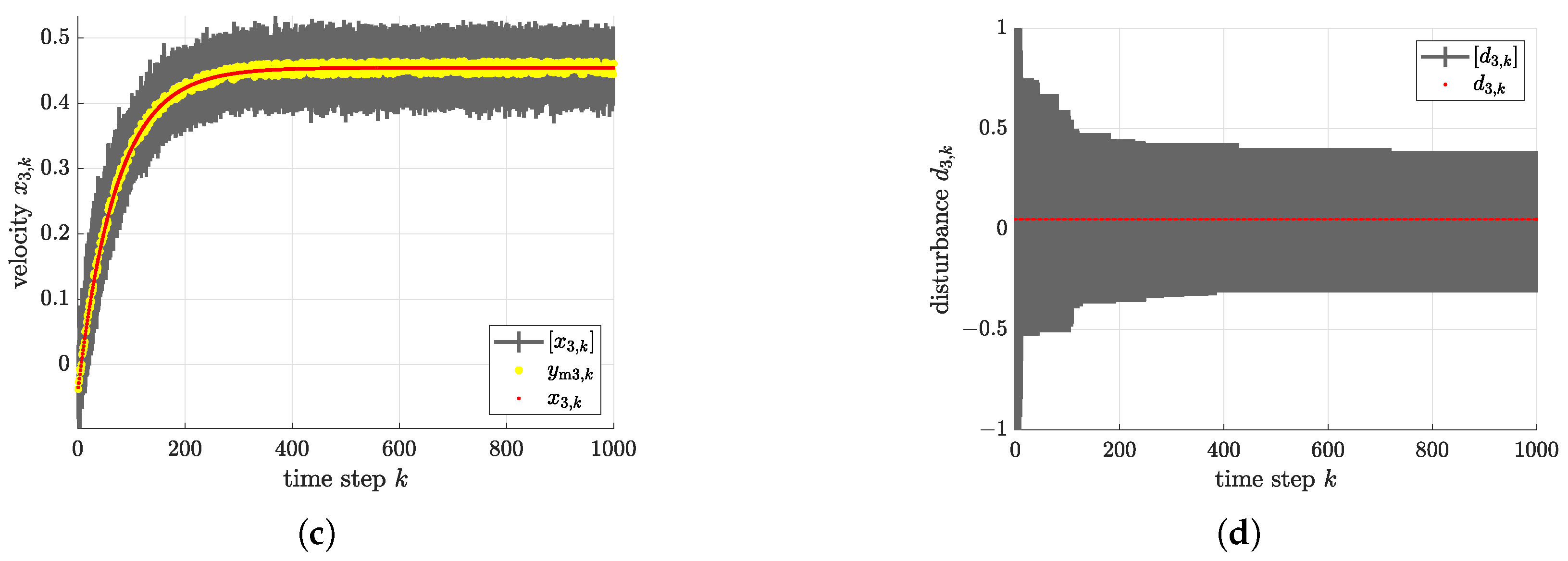
5. Application Scenario: State and Disturbance Estimation for an Underactuated Hovercraft
5.1. Modeling
5.2. Simulation Results
6. Conclusions and Outlook on Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Kletting, M.; Rauh, A.; Aschemann, H.; Hofer, E.P. Interval Observer Design for Nonlinear Systems with Uncertain Time-Varying Parameters. In Proceedings of the 12th IEEE International Conference on Methods and Models in Automation and Robotics MMAR, Miedzyzdroje, Poland, 28–31 August 2006; pp. 361–366. [Google Scholar]
- Kletting, M.; Rauh, A.; Aschemann, H.; Hofer, E.P. Interval Observer Design Based on Taylor Models for Nonlinear Uncertain Continuous-Time Systems. In Proceedings of the 12th GAMM-IMACS International Symposium on Scientific Computing, Computer Arithmetic, and Validated Numerics SCAN, Duisburg, Germany, 26–29 September 2006. [Google Scholar]
- Nedialkov, N.S. Interval Tools for ODEs and DAEs. In Proceedings of the 12th GAMM-IMACS International Symposium on Scientific Computing, Computer Arithmetic, and Validated Numerics SCAN, Duisburg, Germany, 26–29 September 2006. [Google Scholar]
- Nedialkov, N.S. Computing Rigorous Bounds on the Solution of an Initial Value Problem for an Ordinary Differential Equation. Ph.D. Thesis, Graduate Department of Computer Science, University of Toronto, Toronto, ON, Canada, 1999. [Google Scholar]
- Lin, Y.; Stadtherr, M.A. Validated Solutions of Initial Value Problems for Parametric ODEs. Appl. Numer. Math. 2007, 57, 1145–1162. [Google Scholar] [CrossRef]
- Berz, M.; Makino, K. Verified Integration of ODEs and Flows Using Differential Algebraic Methods on High-Order Taylor Models. Reliab. Comput. 1998, 4, 361–369. [Google Scholar] [CrossRef]
- Makino, K.; Berz, M. Suppression of the Wrapping Effect by Taylor Model-Based Validated Integrators; Technical Report MSU HEP 40910; Michigan State University: East Lansing, MI, USA, 2004. [Google Scholar]
- Goubault, E.; Mullier, O.; Putot, S.; Kieffer, M. Inner Approximated Reachability Analysis. In Proceedings of the 17th International Conference on Hybrid Systems: Computation and Control, Berlin, Germany, 15–17April 2014; pp. 163–172. [Google Scholar] [CrossRef]
- Goubault, E.; Putot, S. Robust Under-Approximations and Application to Reachability of Non-Linear Control Systems With Disturbances. IEEE Control Syst. Lett. 2020, 4, 928–933. [Google Scholar] [CrossRef]
- Djeumou, F.; Vinod, A.; Goubault, E.; Putot, S.; Topcu, U. On-The-Fly Control of Unknown Systems: From Side Information to Performance Guarantees through Reachability. 2020. preprint. Available online: www.researchgate.net/publication/345756893On-The-FlyControlofUnknownSystemsFromSideInformationtoPerformanceGuaranteesthroughReachability (accessed on 13 March 2021).
- Jaulin, L.; Kieffer, M.; Didrit, O.; Walter, É. Applied Interval Analysis; Springer: London, UK, 2001. [Google Scholar]
- Moore, R. Interval Arithmetic; Prentice-Hall: Englewood Cliffs, NJ, USA, 1966. [Google Scholar]
- Moore, R.; Kearfott, R.; Cloud, M. Introduction to Interval Analysis; SIAM: Philadelphia, PA, USA, 2009. [Google Scholar]
- Mayer, G. Interval Analysis and Automatic Result Verification; De Gruyter Studies in Mathematics, De Gruyter: Berlin, Germany; Boston, MA, USA, 2017. [Google Scholar]
- Piegat, A.; Dobryakova, L. A Decomposition Approach to Type 2 Interval Arithmetic. Int. J. Appl. Math. Comput. Sci. 2020, 30, 185–201. [Google Scholar]
- Desrochers, B.; Jaulin, L. Thick Set Inversion. Artif. Intell. 2017, 249, 1–18. [Google Scholar] [CrossRef]
- Măceş, D.; Stadtherr, M.A. Computing Fuzzy Trajectories for Nonlinear Dynamic Systems. Comput. Chem. Eng. 2013, 52, 10–25. [Google Scholar] [CrossRef]
- Neumaier, A. The Wrapping Effect, Ellipsoid Arithmetic, Stability and Confidence Regions. In Validation Numerics: Theory and Applications; Albrecht, R., Alefeld, G., Stetter, H.J., Eds.; Springer: Vienna, Austria, 1993; pp. 175–190. [Google Scholar]
- Kurzhanskii, A.B.; Vályi, I. Ellipsoidal Calculus for Estimation and Control; Birkhäuser: Boston, MA, USA, 1997. [Google Scholar]
- Rauh, A.; Jaulin, L. A Computationally Inexpensive Algorithm for Determining Outer and Inner Enclosures of Nonlinear Mappings of Ellipsoidal Domains. Appl. Math. Comput. Sci. AMCS 2021. under review. [Google Scholar]
- Wang, Y.; Puig, V.; Cembrano, G.; Zhao, Y. Zonotopic Fault Detection Observer for Discrete-Time Descriptor Systems Considering Fault Sensitivity. Int. J. Syst. Sci. 2020, 1–15. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, Z.; Raïssi, T.; Wang, Y.; Shen, Y. A State Augmentation Approach to Interval Fault Estimation for Descriptor Systems. Eur. J. Control 2020, 51, 19–29. [Google Scholar] [CrossRef]
- Valero, C.; Paulen, R. Set-Theoretic State Estimation for Multi-output Systems using Block and Sequential Approaches. In Proceedings of the 22nd International Conference on Process Control (PC19), Strbske Pleso, Slovakia, 11–14 June 2019; pp. 268–273. [Google Scholar]
- Rauh, A.; Jaulin, L. A Novel Thick Ellipsoid Approach for Verified Outer and Inner State Enclosures of Discrete-Time Dynamic Systems. In Proceedings of the 19th IFAC Symposium System Identification: Learning Models for Decision and Control, Padova, Italy, 14–16 July 2021. under review. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Daum, F. Nonlinear Filters: Beyond the Kalman Filter. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 57–69. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H. A New Approach for the Nonlinear Transformation of Means and Covariances in Filters and Estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Rauh, A.; Briechle, K.; Hanebeck, U.D. Nonlinear Measurement Update and Prediction: Prior Density Splitting Mixture Estimator. In Proceedings of the 2009 IEEE Control Applications, (CCA) & Intelligent Control, (ISIC), St. Petersburg, Russia,, 8–10 July 2009. [Google Scholar]
- Hanebeck, U.D.; Briechle, K.; Rauh, A. Progressive Bayes: A New Framework for Nonlinear State Estimation. In Multisensor, Multisource Information Fusion: Architectures, Algorithms, and Applications 2003; Dasarathy, B.V., Ed.; International Society for Optics and Photonics, SPIE: Orlando, FL, USA, 2003; Volume 5099, pp. 256–267. [Google Scholar]
- Jambawalikar, S.; Kumar, P. A Note on Approximate Minimum Volume Enclosing Ellipsoid of Ellipsoids. In Proceedings of the 2008 International Conference on Computational Sciences and Its Applications, Perugia, Italy, 30 June–3 July 2008; pp. 478–487. [Google Scholar] [CrossRef]
- Halder, A. On the Parameterized Computation of Minimum Volume Outer Ellipsoid of Minkowski Sum of Ellipsoids. In Proceedings of the IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 4040–4045. [Google Scholar] [CrossRef]
- Yildirim, E.A. On the Minimum Volume Covering Ellipsoid of Ellipsoids. SIAM J. Optim. 2006, 17, 621–641. [Google Scholar] [CrossRef]
- Bourgois, A.; Jaulin, L. Interval Centred Form for Proving Stability of Non-Linear Discrete-Time Ssystems. In Proceedings of the 6th International Workshop on Symbolic-Numeric methods for Reasoning about CPS and IoT, Online, 31 August 2020; 2021; pp. 1–17. [Google Scholar] [CrossRef]
- Chapoutot, A. Interval Slopes as a Numerical Abstract Domain for Floating-Point Variables. In Static Analysis; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; pp. 184–200. [Google Scholar]
- Cornelius, H.; Lohner, R. Computing the Range of Values of Real Functions with Accuracy Higher Than Second Order. Computing 1984, 33, 331–347. [Google Scholar] [CrossRef]
- Scherer, C.; Weiland, S. Linear Matrix Inequalities in Control. In Control System Advanced Methods, 2nd ed.; Levine, W.S., Ed.; The Electrical Engineering Handbook Series; CRC Press: Boca Raton, FL, USA, 2011; pp. 24-1–24-30. [Google Scholar]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Sturm, J. Using SeDuMi 1.02, A MATLAB Toolbox for Optimization over Symmetric Cones. Optim. Methods Softw. 1999, 11–12, 625–653. [Google Scholar] [CrossRef]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the IEEE International Symposium on Computer Aided Control Systems Design, Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar]
- Cichy, B.; Gałkowski, K.; Dąbkowski, P.; Aschemann, H.; Rauh, A. A New Procedure for the Design of Iterative Learning Controllers Using a 2D Systems Formulation of Processes with Uncertain Spatio-Temporal Dynamics. Control Cybern. 2013, 42, 9–26. [Google Scholar]
- Barmish, B.R. New Tools for Robustness of Linear Systems; Macmillan: New York, NY, USA, 1994. [Google Scholar]
- Rump, S. IntLab—INTerval LABoratory; Developments in Reliable Computing; Csendes, T., Ed.; Kluwer Academic Publishers: New York, NY, USA, 1999; pp. 77–104. [Google Scholar]
- Durieu, C.; Polyak, B.T.; Walter, E. Trace Versus Determinant in Ellipsoidal Outer-Bounding, with Application to State Estimation. IFAC Proc. Vol. 1996, 29, 3975–3980. [Google Scholar] [CrossRef]
- Dabbene, F.; Henrion, D. Set Approximation via Minimum-Volume Polynomial Sublevel Sets. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1114–1119. [Google Scholar]
- Tarbouriech, S.; Garcia, G.; Gomes da Silva, J.; Queinnec, I. Stability and Stabilization of Linear Systems with Saturating Actuators; Springer: London, UK, 2011. [Google Scholar]
- Rohn, J. Bounds on Eigenvalues of Interval Matrices. Zamm J. Appl. Math. Mech./Z für angew. Math. und Mech. 1998, 78, 1049–1050. [Google Scholar] [CrossRef]
- Paradowski, T.; Lerch, S.; Damaszek, M.; Dehnert, R.; Tibken, B. Observability of Uncertain Nonlinear Systems Using Interval Analysis. Algorithms 2020, 13, 66. [Google Scholar] [CrossRef]
- Weinmann, A. Uncertain Models and Robust Control; Springer: Wien, Austria, 1991. [Google Scholar]
- Henrion, D.; Tarbouriech, S.; Arzelier, D. LMI Approximations for the Radius of the Intersection of Ellipsoids: Survey. J. Optim. Theory Appl. 2001, 108, 1–28. [Google Scholar] [CrossRef]
- John, F. Extremum Problems with Inequalities as Subsidiary Conditions. In Studies and Essays Presented to R. Courant on His 60th Birthday; Interscience Publishers, Inc.: New York, NY, USA, 1948; pp. 187–204. [Google Scholar]
- Roos, C.; Terlaky, T.; Nemirovski, A.; Roos, K. On Maximization of Quadratic form over Intersection of Ellipsoids with Common Center. Math. Program. 1999, 86. [Google Scholar] [CrossRef]
- Gilitschenski, I.; Hanebeck, U.D. A Robust Computational Test for Overlap of Two Arbitrary-dimensional Ellipsoids in Fault-Detection of Kalman Filters. In Proceedings of the15th International Conference on Information Fusion, Singapore, 9–12 July 2012. [Google Scholar]
- Gilitschenski, I.; Hanebeck, U.D. A Direct Method for Checking Overlap of Two Hyperellipsoids. In Proceedings of the IEEE ISIF Workshop on Sensor Data Fusion: Trends, Solutions, Applications, Bonn, Germany, 8–10 October 2014. [Google Scholar]
- Becis-Aubry, Y. Ellipsoidal Constrained State Estimation in Presence of Bounded Disturbances. 2020. Available online: arxiv.org/pdf/2012.03267v1.pdf (accessed on 13 March 2021).
- Stengel, R. Optimal Control and Estimation; Dover Publications, Inc.: New York, NY, USA, 1994. [Google Scholar]
- Kurzhanskiy, A.; Varaiya, P. Ellipsoidal Toolbox (ET). In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 1498–1503. [Google Scholar]
- Rauh, A.; Grigoryev, V.; Aschemann, H.; Paschen, M. Incremental Gain Scheduling and Sensitivity-Based Control for Underactuated Ships. In Proceedings of the IFAC Conference on Control Applications in Marine Systems, CAMS, Rostock-Warnemunde, Germany, 15–17 September 2010. [Google Scholar]
- Rauh, A. Sensitivity Methods for Analysis and Design of Dynamic Systems with Applications in Control Engineering; Shaker: Düren, Germany, 2017. [Google Scholar]
- Fossen, T. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1994. [Google Scholar]
- Reyhanoglu, M. Exponential Stabilization of an Underactuated Autonomous Surface Vessel. Automatica 1997, 33, 2249–2254. [Google Scholar] [CrossRef]
- Pfaff, F.; Noack, B.; Hanebeck, U.D. Data Validation in the Presence of Stochastic and Set-membership Uncertainties. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013. [Google Scholar]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rauh, A.; Bourgois, A.; Jaulin, L. Union and Intersection Operators for Thick Ellipsoid State Enclosures: Application to Bounded-Error Discrete-Time State Observer Design. Algorithms 2021, 14, 88. https://doi.org/10.3390/a14030088
Rauh A, Bourgois A, Jaulin L. Union and Intersection Operators for Thick Ellipsoid State Enclosures: Application to Bounded-Error Discrete-Time State Observer Design. Algorithms. 2021; 14(3):88. https://doi.org/10.3390/a14030088
Chicago/Turabian StyleRauh, Andreas, Auguste Bourgois, and Luc Jaulin. 2021. "Union and Intersection Operators for Thick Ellipsoid State Enclosures: Application to Bounded-Error Discrete-Time State Observer Design" Algorithms 14, no. 3: 88. https://doi.org/10.3390/a14030088
APA StyleRauh, A., Bourgois, A., & Jaulin, L. (2021). Union and Intersection Operators for Thick Ellipsoid State Enclosures: Application to Bounded-Error Discrete-Time State Observer Design. Algorithms, 14(3), 88. https://doi.org/10.3390/a14030088