

An Experimental Study on the Effectiveness of the Backward-Facing Step Technique on Small-Scale Horizontal-Axis Wind Turbine Rotor Blades


Abstract
1. Introduction
2. Material and Methodology
2.1. Baseline Rotor Blade Geometry Generation
Blade Shape Design
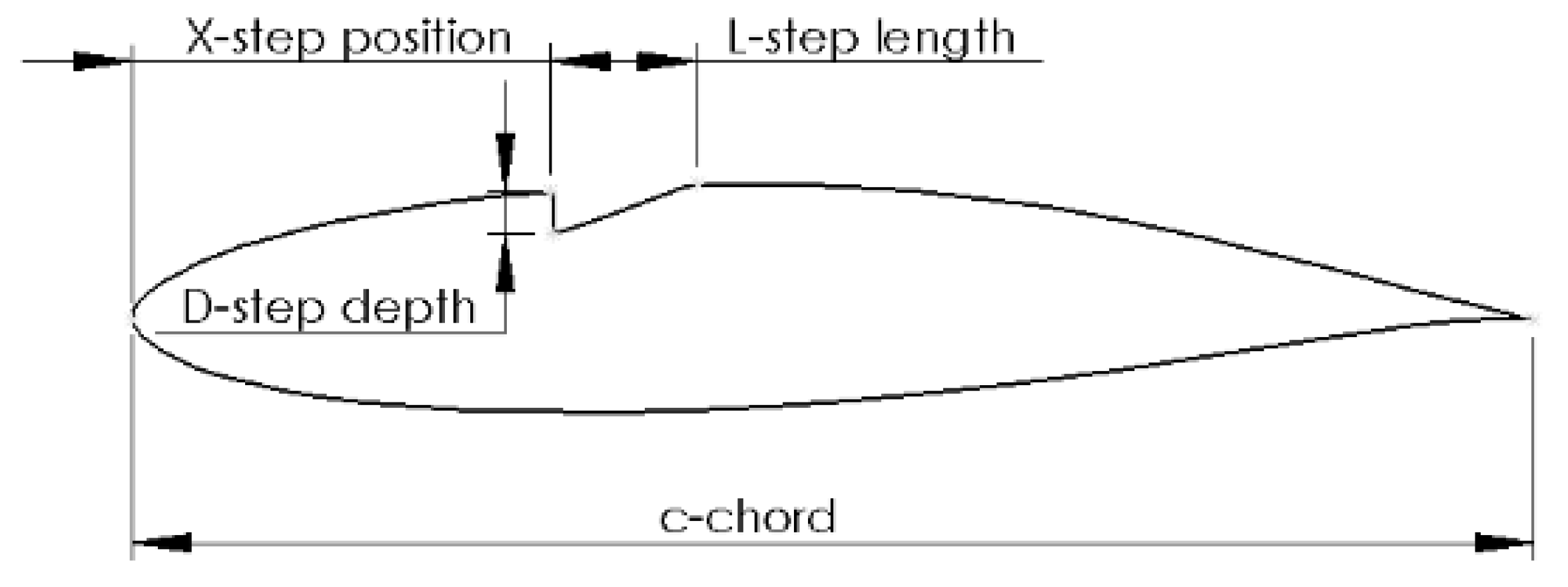
2.2. Generation of Stepped Blade Models
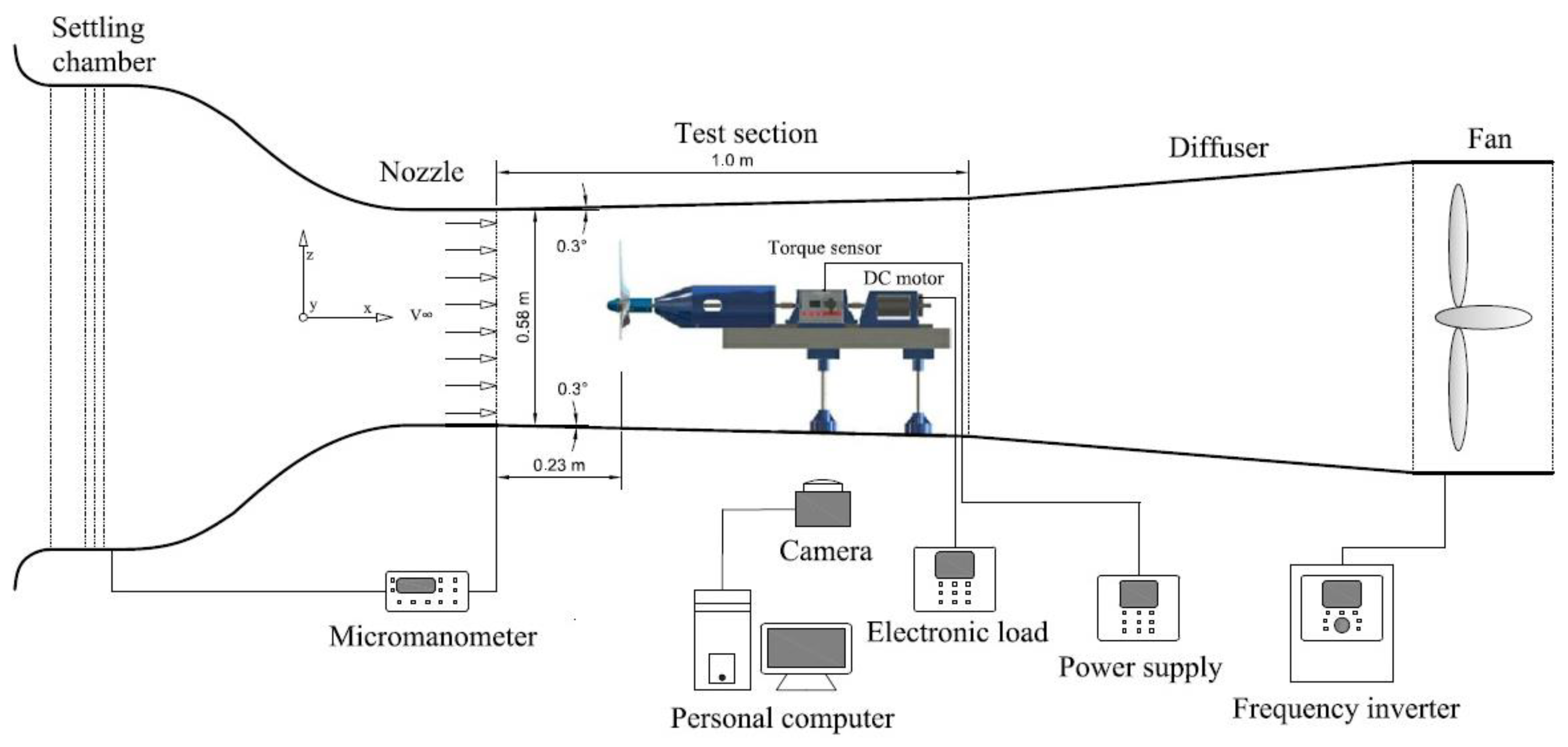
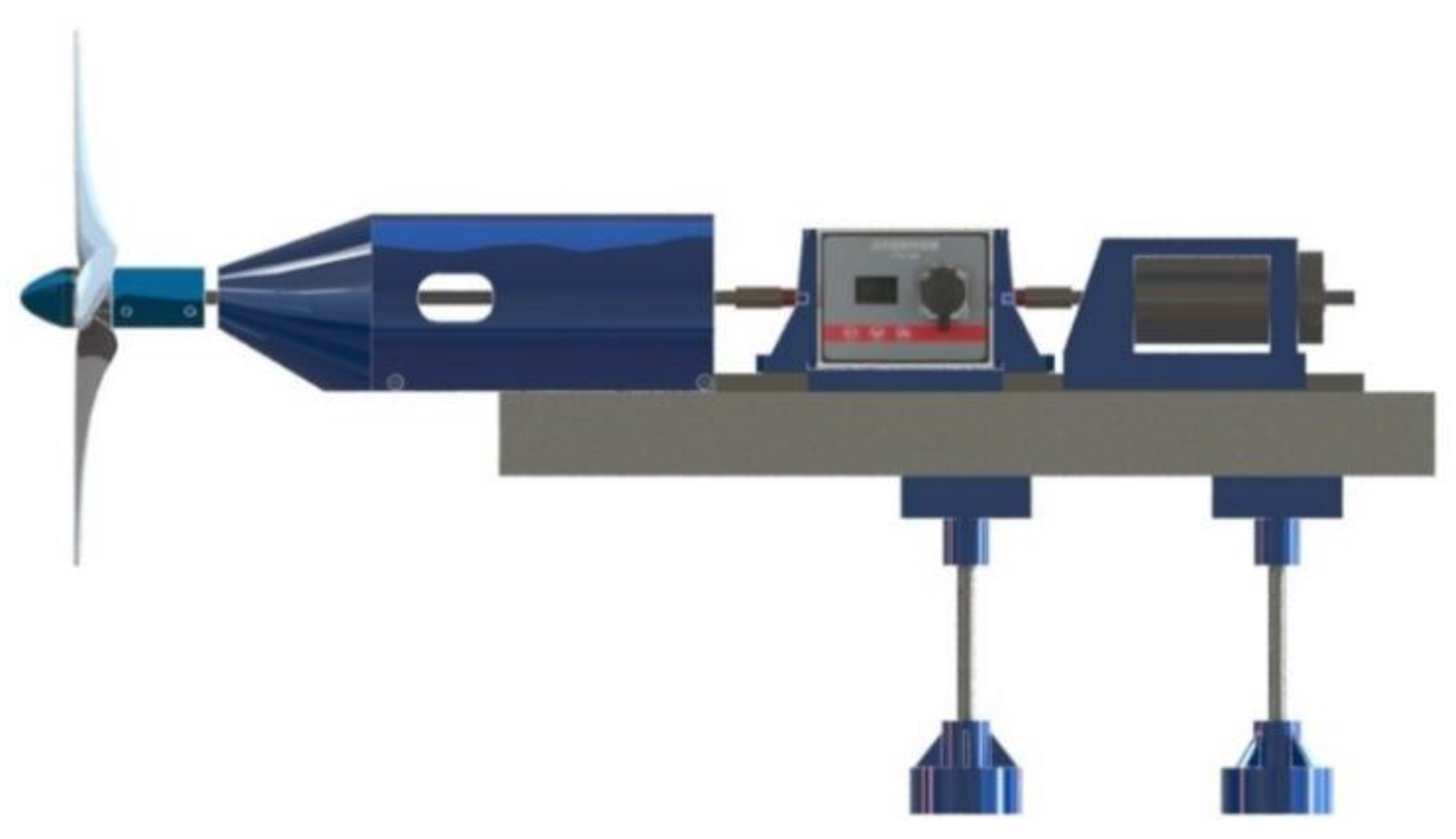
2.3. Experimental Setup and Validation
3. Results and Discussion
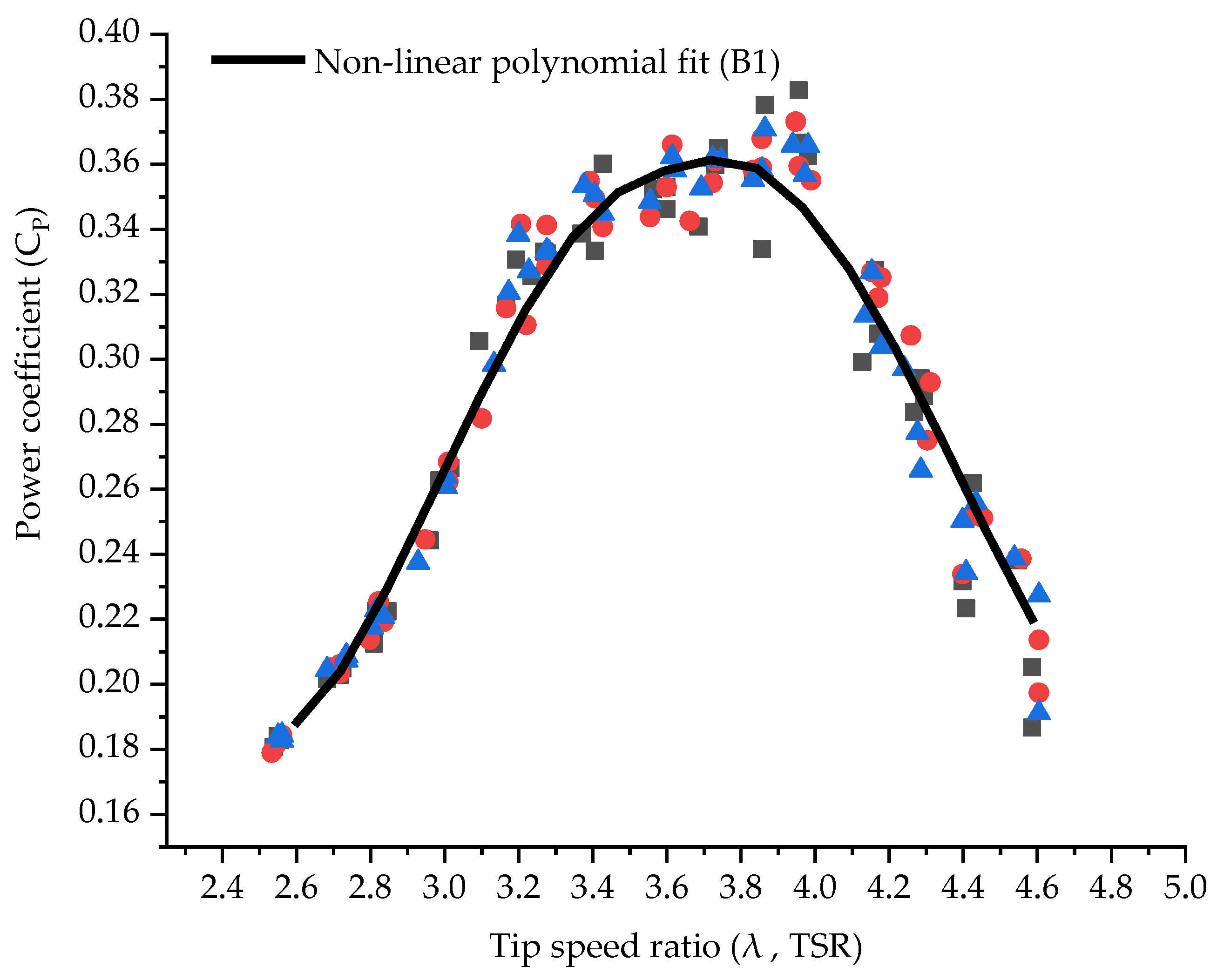
3.1. Representative Power Coefficient Curve and Validation
3.2. B2 Rotor Blade Model
3.3. B3 Rotor Blade Model
3.4. B4 Rotor Blade Model
3.5. B5 Rotor Blade Model
3.6. B6 Rotor Blade Model
4. Conclusions
- -
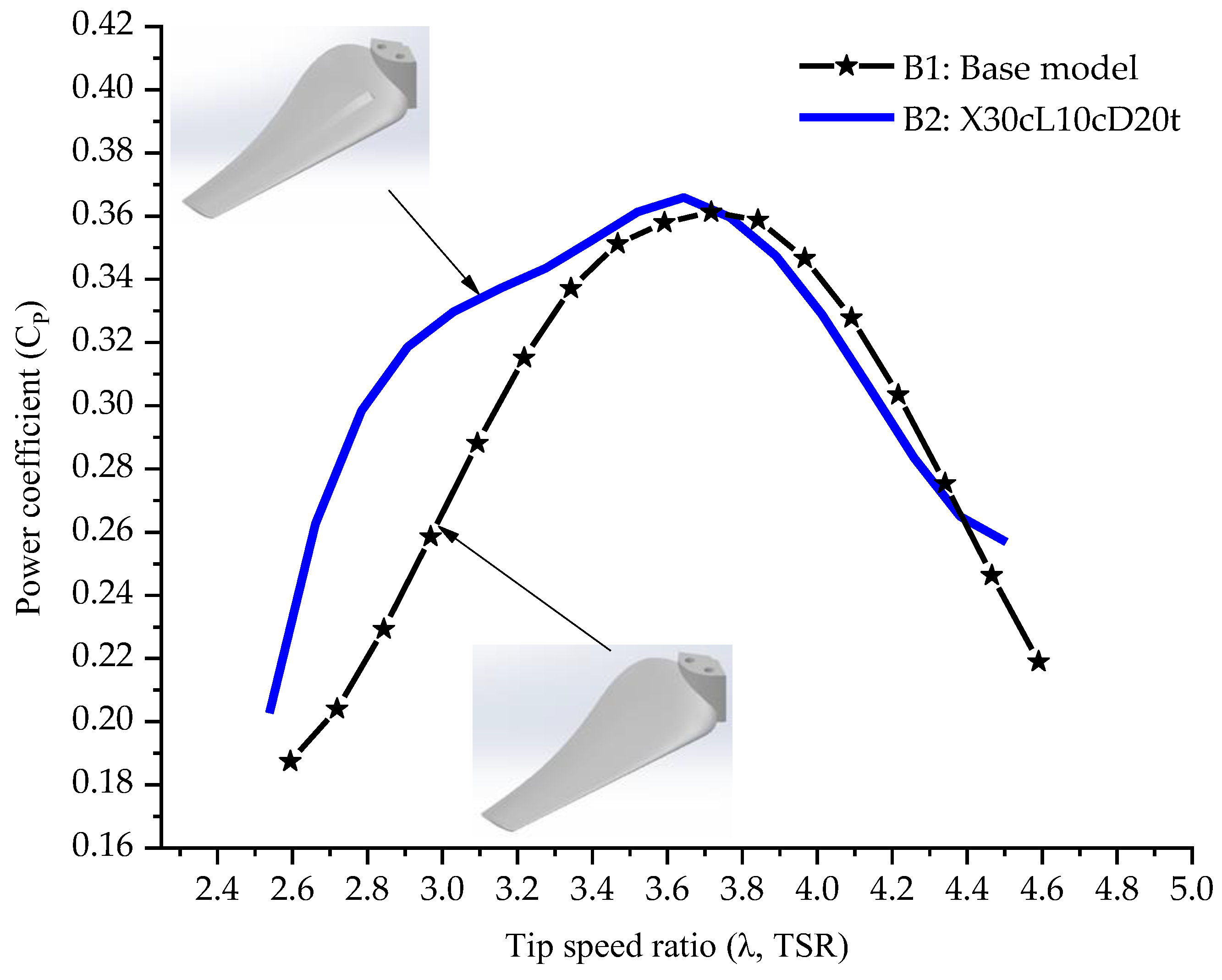
- Rotor model B2, with a step location close to the leading edge (30c), a length of 10c, and nearly a 20c depth, exhibited a peak CP around 1.4% higher than the base model B1. This enhancement performance was observed at TSRs up to 3.76, showcasing an efficiency improvement of approximately 36% over the base rotor model B1 at a TSR of 2.82. The advantages are attributed to the modified rotor blade’s poorer surface quality, promoting vortex formation, flow reattachment, and preventing separation through suction for improved flow quality;
- -
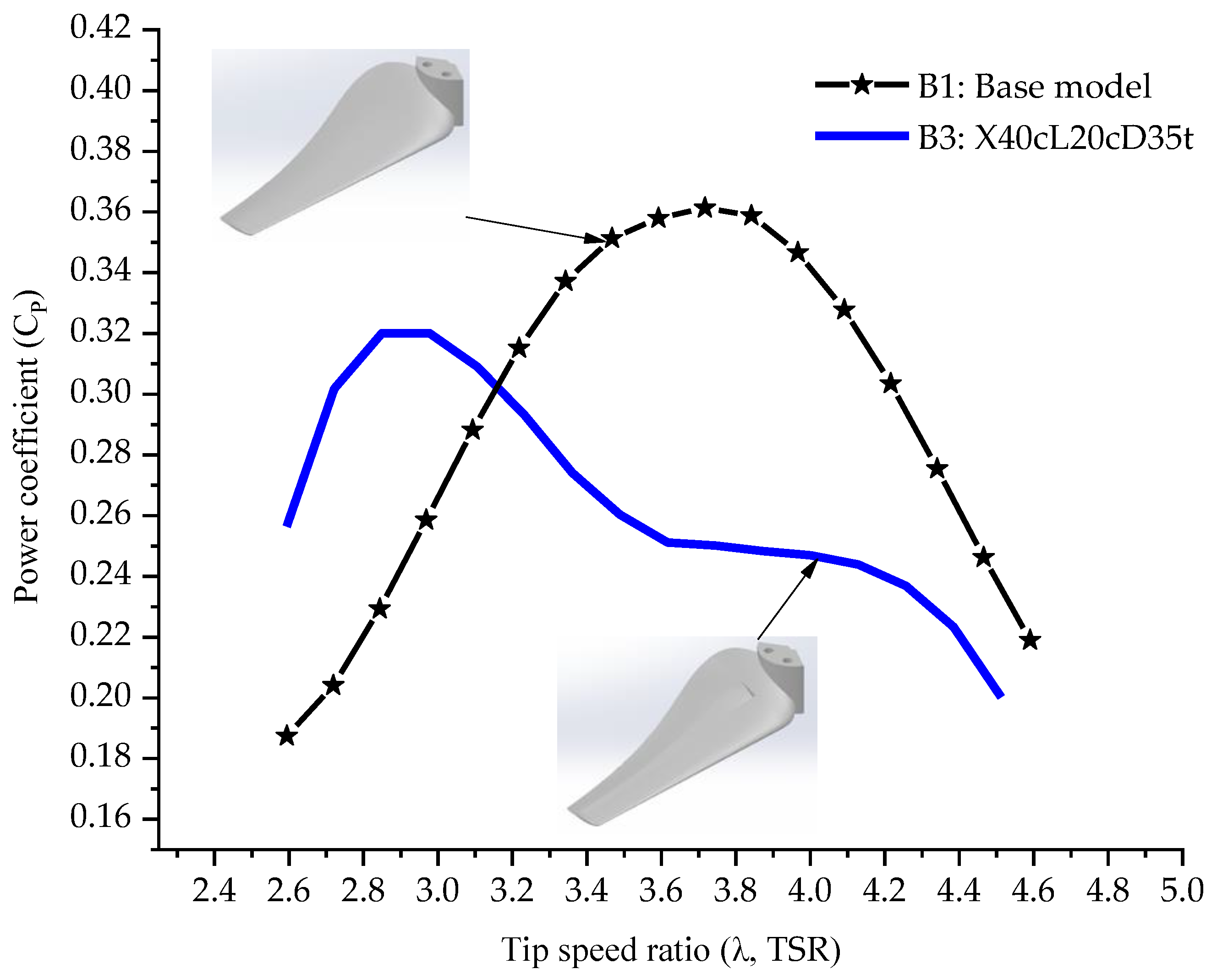
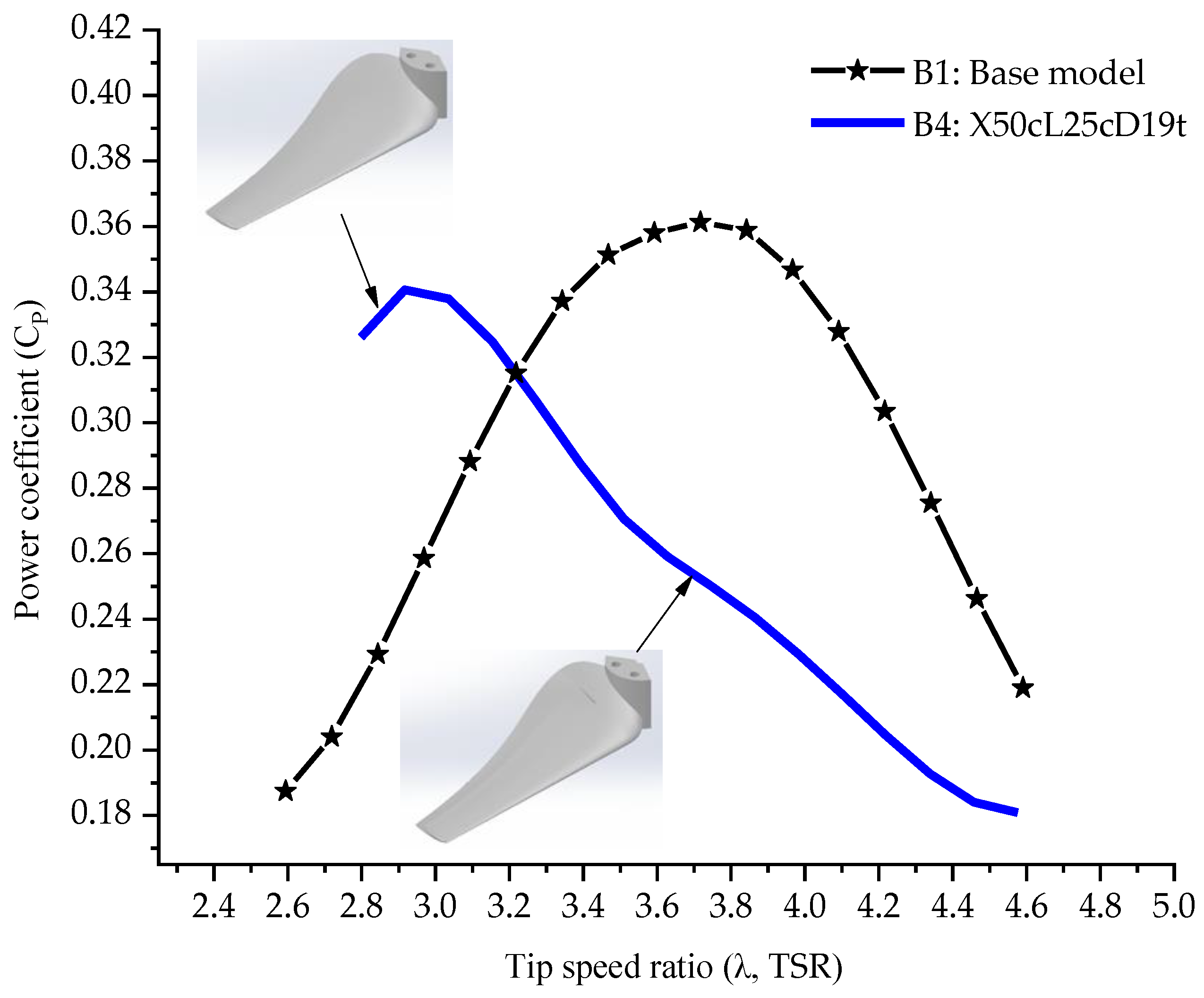
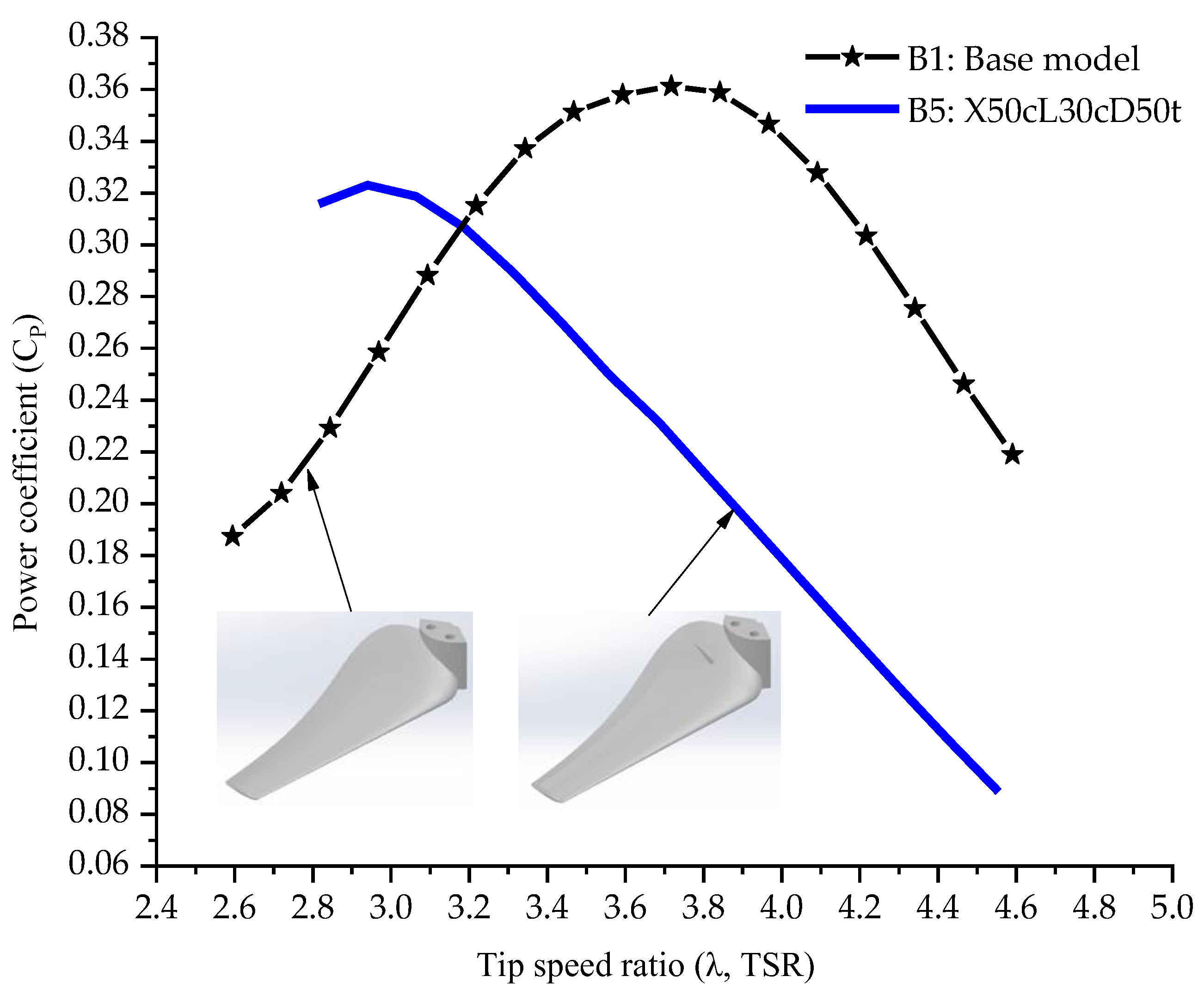
- Rotor models B3, B4, and B5 showed effectiveness (up to 47%, rotor model B3 at a tip-speed ratio around 2.72) for TSRs smaller than 3.2 compared to the base model B1. This situation can be explained as follows: In the B2 model, due to the step position’s proximity to the leading edge of the blade and its narrow length, it creates an effect akin to a vortex generator on the blade’s suction surface, suppressing flow separation from the surface. Conversely, in the cases of the B3, B4, and B5 models, the shift of the step position toward the trailing edge makes it challenging for the flow to adhere to the surface, potentially amplifying stall effects. Furthermore, a larger step length and depth disrupt the general aerodynamic structure of the blade, detrimentally impacting the generation of aerodynamic forces. Experimental measurements for the rotor models B4 and B5 at smaller TSRs than approximately 2.82 were hindered by vibrations;
- -
- The hybrid rotor model B6 outperformed the base model B1 for TSRs smaller than 3.22, achieving an efficiency improvement of nearly 31%. Efficiency increased by approximately 20% for higher TSRs than 3.22 compared to the rotor model B4, indicating significant improvement.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| angle of attack | |
| wave amplitude | |
| local twist angle | |
| number of blades | |
| average chord length of the blade | |
| local chord | |
| lift coefficient | |
| drag coefficient | |
| power coefficient | |
| diameter of rotor | |
| step depth | |
| local inflow angle | |
| tip-speed ratio | |
| local tip-speed ratio | |
| step length | |
| dynamic viscosity of the air | |
| number of blade elements | |
| local radius | |
| rotor radius | |
| Reynolds number | |
| thickness of airfoil | |
| air density | |
| rotor solidity | |
| blade tip-speed | |
| relative velocity | |
| wind speed | |
| step position |
References
- Corke, T. Wind Energy Design; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Hau, E. Wind Turbines: Fundamentals, Technologies, Application, Economics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Nelson, V.; Starcher, K. Wind Energy: Renewable Energy and the Environment; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- IEA Net Zero Emissions Scenario 2050. Available online: https://www.iea.org/reports/net-zero-by-2050 (accessed on 1 December 2023).
- Giguère, P.; Selig, M.S. Low Reynolds Number Airfoils for Small Horizontal Axis Wind Turbines. Wind. Eng. 1997, 21, 367–380. [Google Scholar]
- Van Treuren, K.W. Small-Scale Wind Turbine Testing in Wind Tunnels under Low Reynolds Number Conditions. J. Energy Resour. Technol. Trans. ASME 2015, 137, 051208. [Google Scholar] [CrossRef]
- IMechE. The International Vehicle Aerodynamics Conference; Woodhead Publishing: Sawston, UK, 2014. [Google Scholar]
- Olsman, W.F.J.; Colonius, T. Numerical Simulation of Flow over an Airfoil with a Cavity. AIAA J. 2011, 49, 143–149. [Google Scholar] [CrossRef]
- Ringleb, F.O. Separation Control by Trapped Vortices. In Boundary Layer and Flow Control; Lachmann, G.V., Ed.; Pergamon Press: Oxford, UK, 1961; Volume 1, pp. 265–294. [Google Scholar]
- Adkins, R.C. A Short Diffuser with Low Pressure Loss. J. Fluids Eng. 1975, 97, 297–302. [Google Scholar] [CrossRef]
- Fertis, D.G. New Airfoil-Design Concept with Improved Aerodynamic Characteristics. J. Aerosp. Eng. 1994, 7, 328–339. [Google Scholar] [CrossRef]
- Finaish, F.; Witherspoon, S. Aerodynamic Performance of an Airfoil with Step-Induced Vortex for Lift Augmentation. J. Aerosp. Eng. 1998, 11, 9–16. [Google Scholar] [CrossRef]
- Mishriky, F.; Walsh, P. Effect of the Backward-Facing Step Location on the Aerodynamics of a Morphing Wing. Aerospace 2016, 3, 25. [Google Scholar] [CrossRef]
- Boroomand, M.; Hosseinverdi, S. Numerical Investigation of Turbulent Flow around a Stepped Airfoil at High Reynolds Number. In Proceedings of the ASME 2009 Fluids Engineering Division Summer Meeting, Vail, CO, USA, 2–6 August 2009. [Google Scholar]
- Donelli, R.S.; De Gregorio, F.; Pierluigi, I. Flow Separation Control by Trapped Vortex. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010. [Google Scholar]
- Witherspoon, S.; Finaisht, F. Experimental and Computational Studies of Flow Developments around an Airfoil with Backward-Facing Steps. In Proceedings of the 14th Applied Aerodynamics Conference, New Orleans, LA, USA, 17–20 June 1996. [Google Scholar]
- Chowdhury, M.S.; Mau, M.M.; Shayok, M.I.; Mallick, R.B.; Ali, M. Effect of Backward Facing Step on the Aerodynamic Characteristics of NACA 0015 Airfoil. In Proceedings of the 8th BSME International Conference on Thermal Engineering, Dhaka, Bangladesh, 19–21 December 2018. [Google Scholar]
- Rowley, C.; Juttijudata, V.; Williams, D. Cavity Flow Control Simulations and Experiments. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005. [Google Scholar]
- Shi, S.; New, T.H.; Liu, Y. On the Flow Behaviour of a Vortex-Trapping Cavity NACA0020 Aerofoil at Ultra-Low Reynolds Number. In Proceedings of the 17th International Symposium on Applications of Laser Techniques to Fluid Mechanics, Lisbon, Portugal, 7–10 July 2014. [Google Scholar]
- De Gregorio, F.; Fraioli, G. Flow Control on a High Thickness Airfoil by a Trapped Vortex Cavity. In Proceedings of the 14th International Symposium on Applications of Laser Techniques to Fluid Mechanics, Lisbon, Portugal, 7–10 July 2008. [Google Scholar]
- Tangler, J.; Somers, D. NREL Airfoil Families for HAWTs; National Renewable Energy Lab. (NREL): Golden, CO, USA, 1995.
- Winslow, J.; Otsuka, H.; Govindarajan, B.; Chopra, I. Basic Understanding of Airfoil Characteristics at Low Reynolds Numbers (104–105). J. Aircr. 2018, 55, 1050–1061. [Google Scholar] [CrossRef]
- Hansen, M.O.L. Aerodynamics and Design of Horizontal-Axis Wind Turbines. In Wind Energy Engineering: A Handbook for Onshore and Offshore Wind Turbines; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- McLean, D. Understanding Aerodynamics: Arguing from the Real Physics; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Schetz, J.A.; Fuhs, A.E. Handbook of Fluid Dynamics and Fluid Machinery; Wiley: Hoboken, NJ, USA, 1996. [Google Scholar]
- Wood, D. Small Wind Turbines: Analysis, Design, and Application; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Morina, R.; Akansu, Y.E. The Effect of Leading-Edge Wavy Shape on the Performance of Small-Scale HAWT Rotors. Energies 2023, 16, 6405. [Google Scholar] [CrossRef]
- Morina, R. Development of a Horizontal Axis Wind Turbine Blade Profile Based on Passive Flow Control Methods. Ph.D. Thesis, Niğde Ömer Halisdemir University, Niğde, Turkey, 2021. [Google Scholar]
- Gasch, R.; Twele, J. Wind Power Plants: Fundamentals, Design, Construction and Operation, 2nd ed.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Burdet, T.A.; Van Treuren, K.W. Van. Scaling Small-Scale Wind Turbines For Wind Tunnel Testing. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2012. [Google Scholar]
- Burdett, T.A.; Van Treuren, K.W. A Theoretical and Experimental Comparison of Optimizing Angle of Twist Using BET and BEMT. In Proceedings of the ASME Turbo Expo 2012: Turbine Technical Conference and Exposition, Copenhagen, Denmark, 11–15 June 2012. [Google Scholar]
- Kishore, R.; Stewart, C.; Priya, S. Wind Energy Harvesting: Micro-to-Small Scale Turbines; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2018. [Google Scholar]
- Akbıyık, H. Control of Flow around a Circular Cylinder by Using Active and Passive Control Methods. Master’s Thesis, NÖHU Graduate School of Natural and Applied Sciences, Niğde, Türkiye, 2014; pp. 53–59. [Google Scholar]
- Lanzafame, R.; Mauro, S.; Messina, M. Numerical and Experimental Analysis of Micro HAWTs Designed for Wind Tunnel Applications. Int. J. Energy Environ. Eng. 2016, 7, 199–210. [Google Scholar] [CrossRef]
- Bakırcı, M.; Yılmaz, S. Theoretical and Computational Investigations of the Optimal Tip-Speed Ratio of Horizontal-Axis Wind Turbines. Eng. Sci. Technol. Int. J. 2018, 21, 1128–1142. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Diameter (Dr) | 600 | mm |
| Wind speed (V∞) | 9 | m/s |
| Density of air (ρ) | 1.225 | kg/m3 |
| Reynolds number (Re) | 1 × 105 | - |
| Number of blades (B) | 3 | pcs |
| Tip-speed ratio (TSR, λ) | 3.658 | - |
| Solidity (σ) | 22.1 | % |
| Lift coefficient (CL) (XFoil 6.9) | 0.9256 | - |
| Drag coefficient (CD) (XFoil 6.9) | 0.02168 | - |
| Angle of attack (α) | 8.5 | degree (°) |
| Glide ratio (CL/CD) (XFoil 6.9) | 42.7 | - |
| Number of elements (N) | 10 | pcs |
| Ncrit (XFoil 6.9) | 9 | - |
| Station | Radius, ri (mm) | Chord Length, ci (mm) | Twist Angle, βi (°) |
|---|---|---|---|
| Hub | 16.33 | - | - |
| 1 | 28.0 | 48.1 | 27.4 |
| 2 | 39.2 | 46.1 | 21.0 |
| 3 | 50.4 | 42.1 | 16.3 |
| 4 | 61.6 | 37.9 | 12.7 |
| 5 | 72.8 | 34.0 | 10.0 |
| 6 | 84.0 | 30.7 | 7.8 |
| 7 | 95.2 | 27.8 | 6.1 |
| 8 | 106.4 | 25.4 | 4.7 |
| 9 | 117.6 | 23.3 | 3.5 |
| 10 | 128.8 | 21.5 | 2.5 |
| 11 | 140.0 | 20.0 | 1.7 |
| cavg = 32.4 |
B1—Base Model | B2—X30cL10cD20t |
B3—X40cL20cD35t | B4—X50cL25cD19t |
B5—X50cL30cD50t | B6—X50cL25cD19t—A1λ3.5 |
| No | Blade Models | X-Step Position (%c) | L-Step Length (%c) | D-Step Depth (%t) | Wavy Shape Amplitude A (mm) | Wavy Shape Wave Length λ (mm) |
|---|---|---|---|---|---|---|
| 1 | B1-Base model | - | - | - | - | - |
| 2 | B2-X30cL10cD20t | 30 | 10 | 20 | - | - |
| 3 | B3-X40cL20cD35t | 40 | 20 | 35 | - | - |
| 4 | B4-X50cL25cD19t | 50 | 25 | 19 | - | - |
| 5 | B5-X50cL30cD50t | 50 | 30 | 50 | - | - |
| 6 | B6-X50cL25cD19t—A1λ3.5 | 50 | 25 | 19 | 1 | 3.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morina, R.; Akansu, Y.E. An Experimental Study on the Effectiveness of the Backward-Facing Step Technique on Small-Scale Horizontal-Axis Wind Turbine Rotor Blades. Energies 2024, 17, 1170. https://doi.org/10.3390/en17051170
Morina R, Akansu YE. An Experimental Study on the Effectiveness of the Backward-Facing Step Technique on Small-Scale Horizontal-Axis Wind Turbine Rotor Blades. Energies. 2024; 17(5):1170. https://doi.org/10.3390/en17051170
Chicago/Turabian StyleMorina, Riad, and Yahya Erkan Akansu. 2024. "An Experimental Study on the Effectiveness of the Backward-Facing Step Technique on Small-Scale Horizontal-Axis Wind Turbine Rotor Blades" Energies 17, no. 5: 1170. https://doi.org/10.3390/en17051170
APA StyleMorina, R., & Akansu, Y. E. (2024). An Experimental Study on the Effectiveness of the Backward-Facing Step Technique on Small-Scale Horizontal-Axis Wind Turbine Rotor Blades. Energies, 17(5), 1170. https://doi.org/10.3390/en17051170