
Method of Reduction in Energy Consumption by the Drive Systems of a Mobile Device with a Controlled Gear Ratio



Abstract
:1. Introduction
2. Materials and Methods
2.1. Simulation Research of the Robot
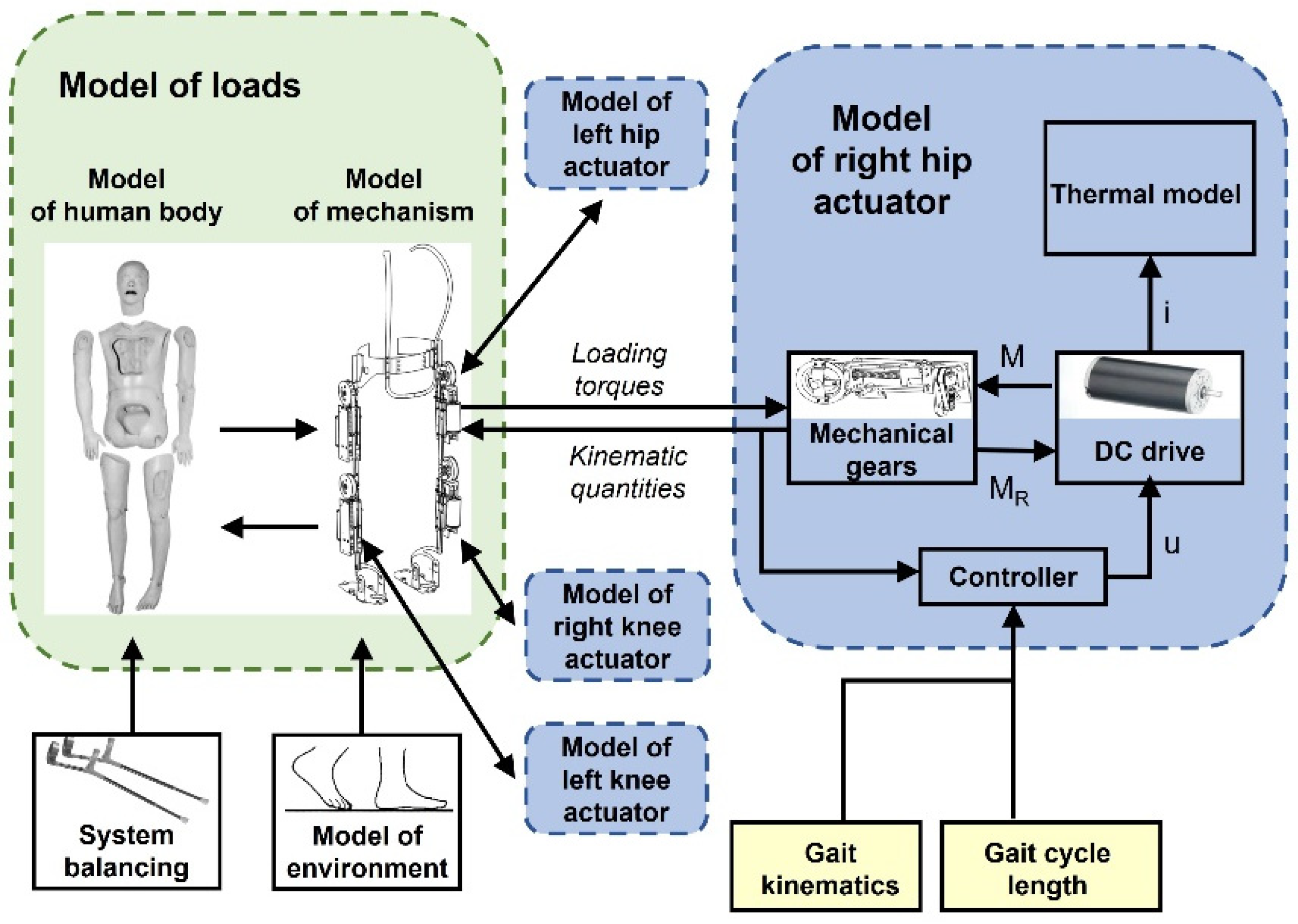
2.1.1. Model of the Robot
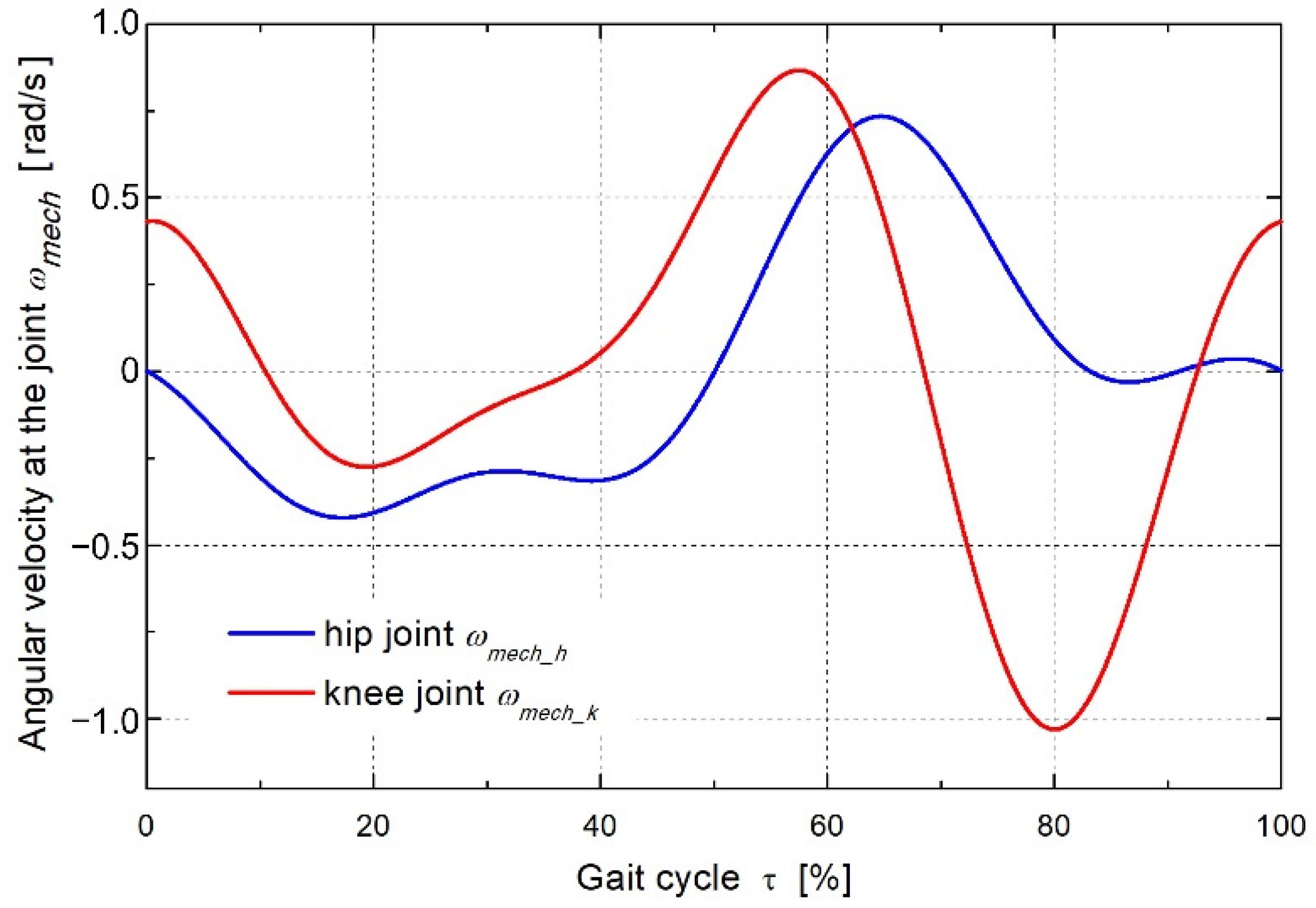
2.1.2. Simulation Research
2.2. Calculation of Electrical Energy Drawn from the Source
3. Results
3.1. Determination of the Characteristics of the Consumed Power
3.2. Development of Proposals for Changes in the Ratio
3.3. Determination of Energy Consumed in the Gait Cycle
3.4. Experimental Research
3.4.1. Research Plan
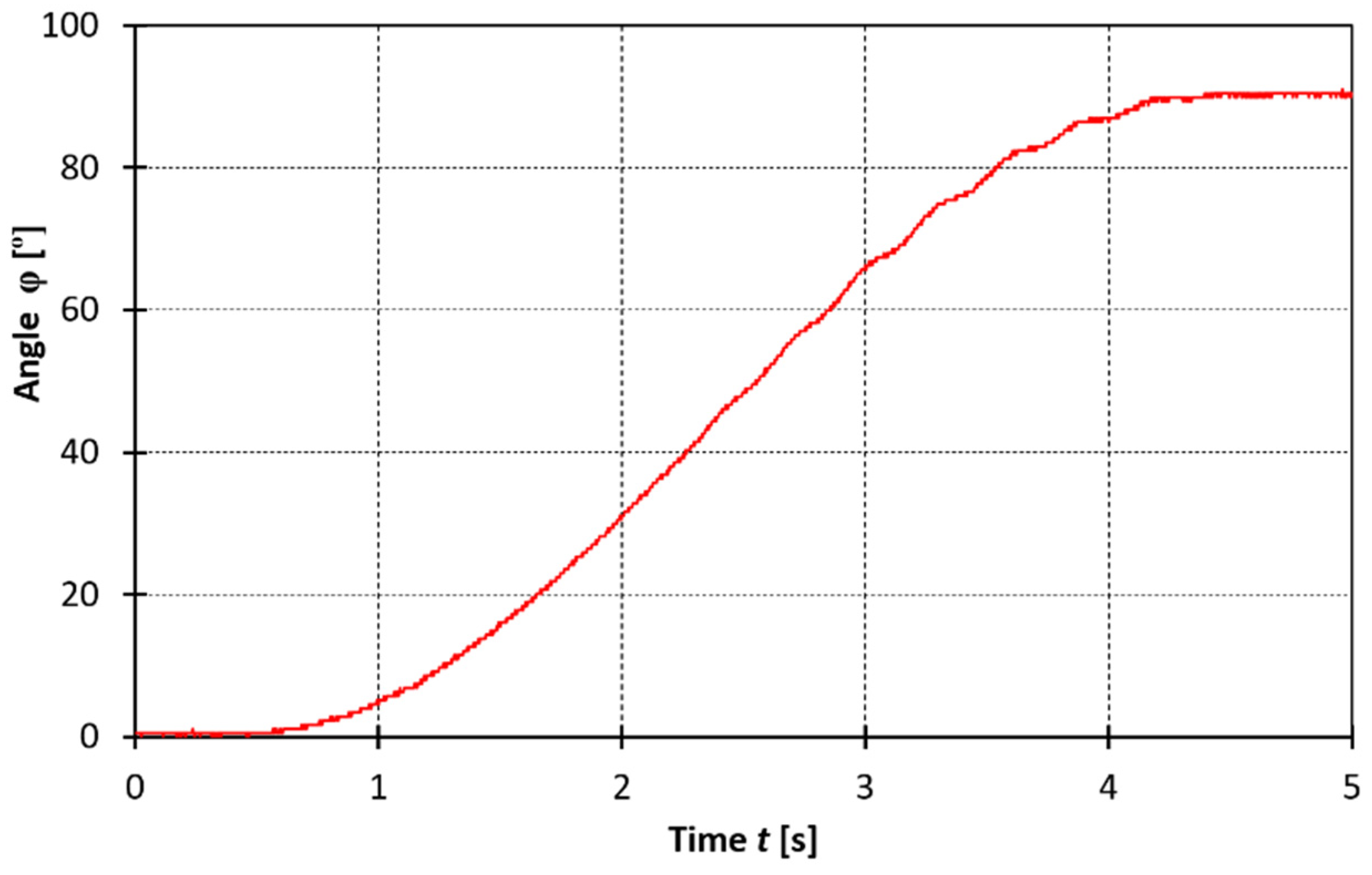
- Implementation of selected motion profiles at the driven joint for several different gear ratios of the drive system and at different loads on the joint, with simultaneous recording of the time courses of electric power consumed by the drive motor, and checking at the same time the course of the rotation angle at the joint in order to guarantee compliance with the assumed functional requirements;
- Presentation of the recorded results in a form of plots of the electric power consumed for each of the gear ratios and each of the loads, as well as the calculation of the amount of energy consumed for each of the cases;
- An attempt to synthesise, for each load, the temporal fragments of power courses in such a way, as to obtain the lowest possible energy consumption. The result of this operation is to indicate the suggested moments of time, when the gear ratio is to be changed during the standard operation of the drive.
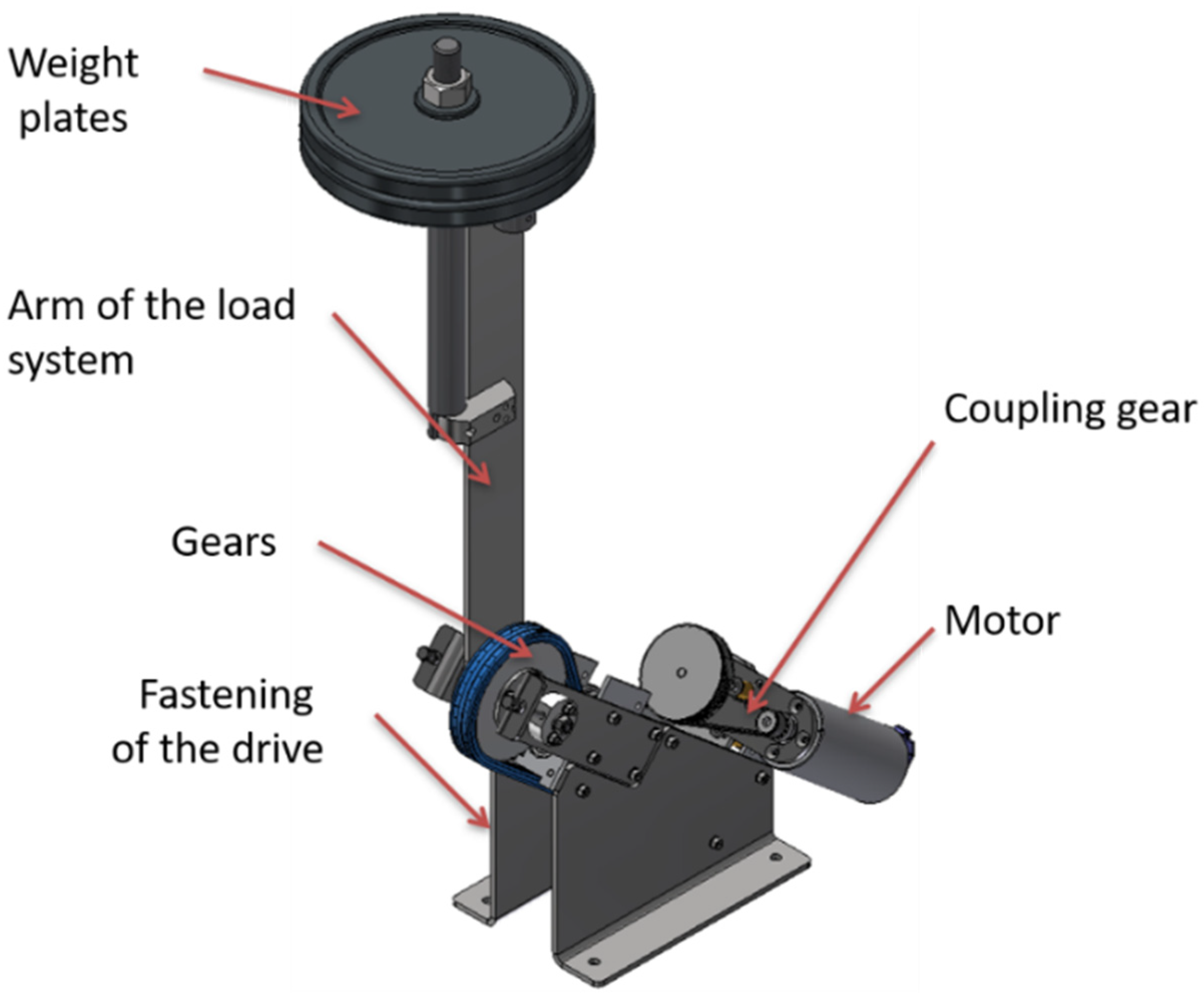
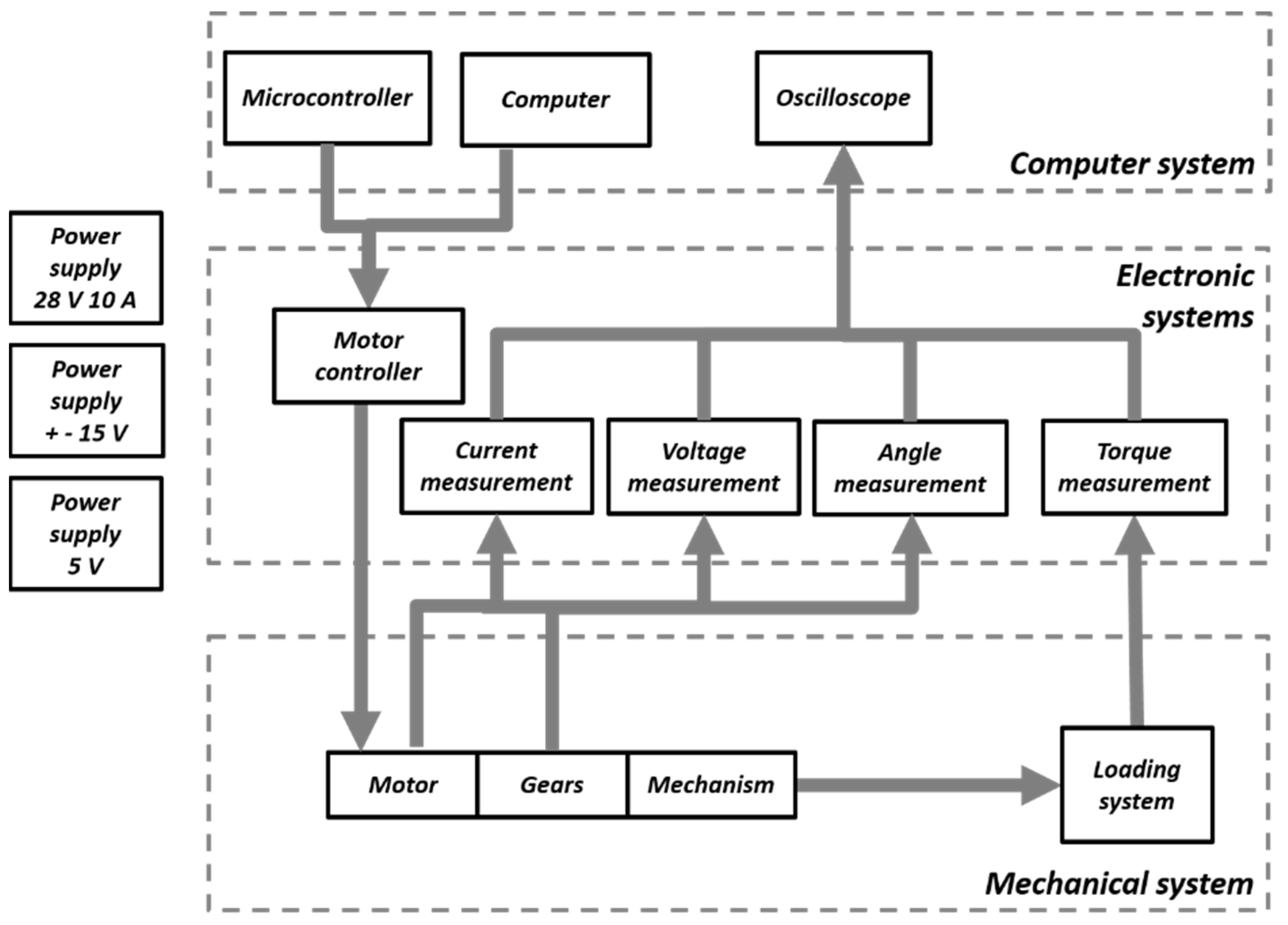
3.4.2. The Test Stand
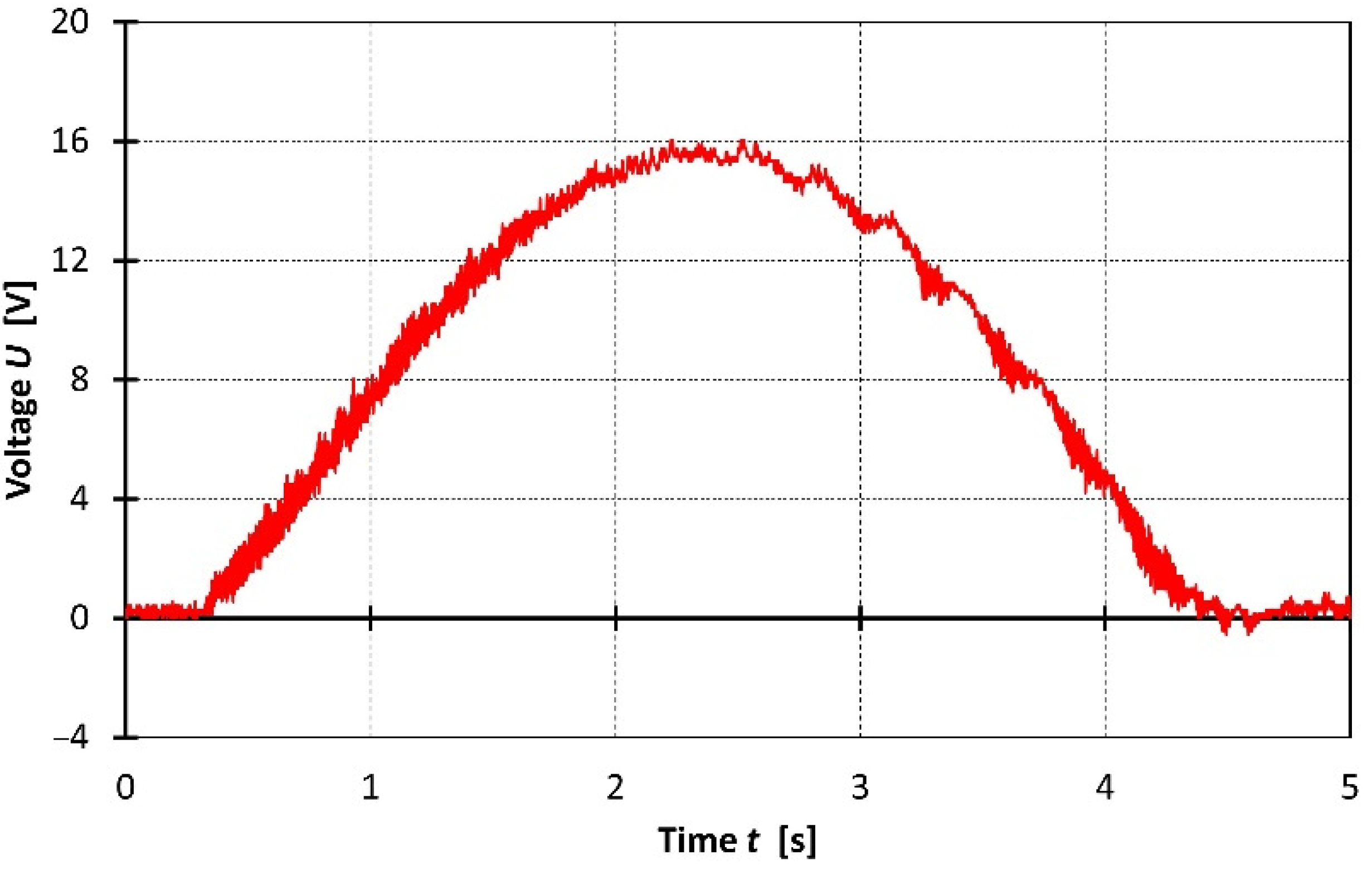
3.4.3. Research and the Obtained Results
- Voltage supplying the motor;
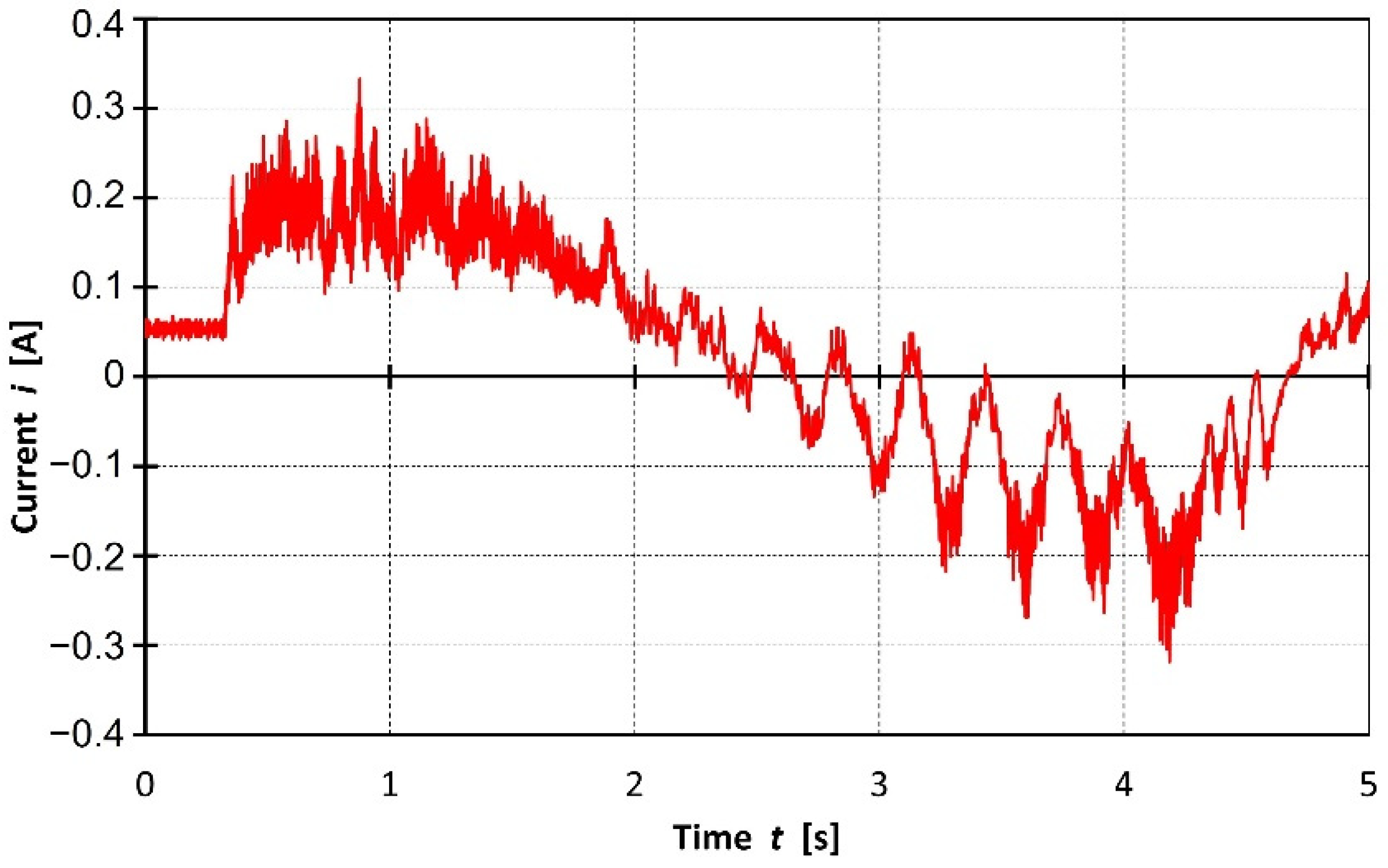
- Motor current;
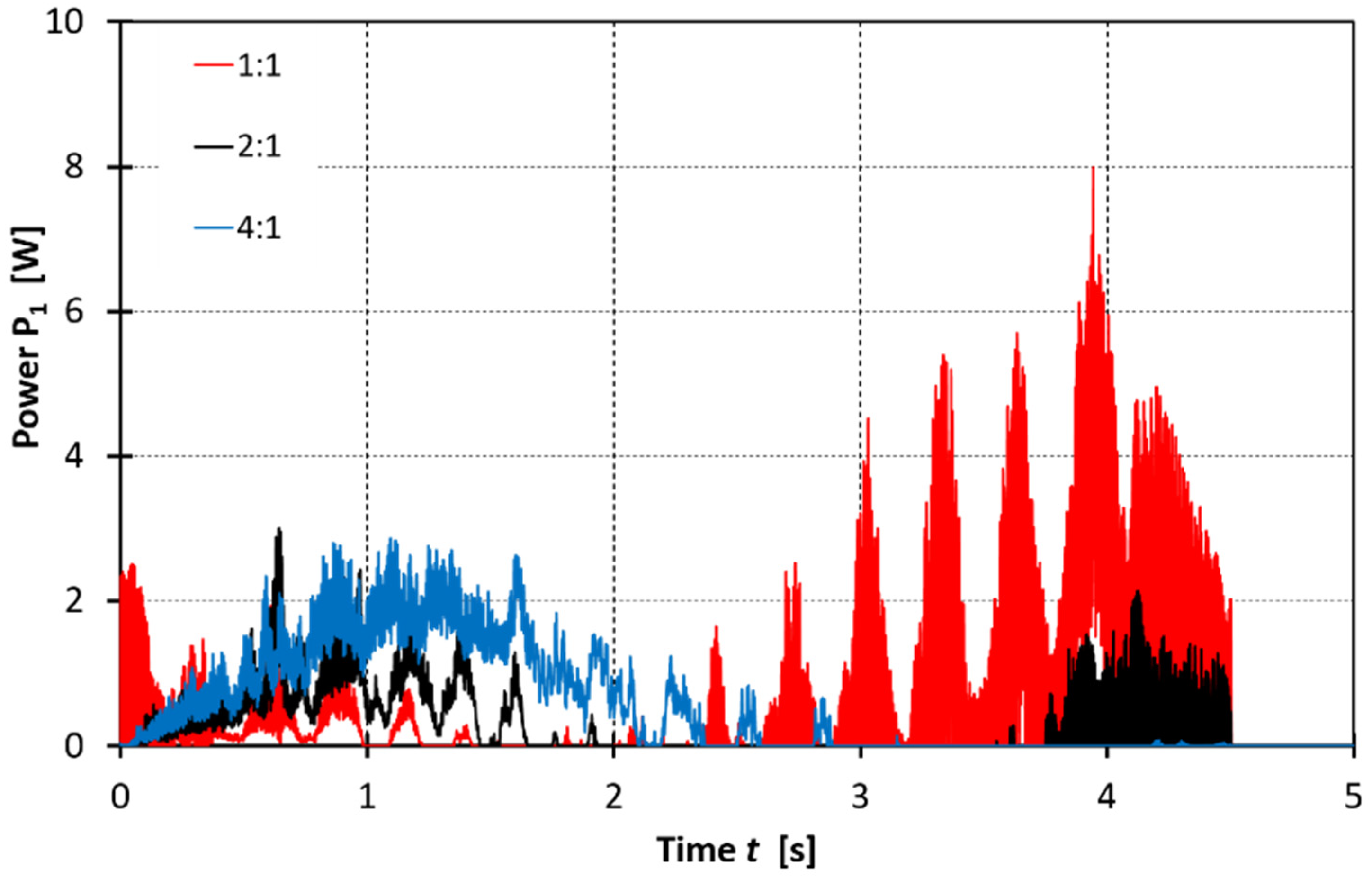
- Instantaneous electric power P1;
- Total electric energy E1;
- Angle α at the joint.
- There is a visible relationship between the gear ratio and the electric energy consumed by the drive system during the movement, both at a constant speed and at a sine-profile of the speed;
- Differences in energy consumption depending on the gear ratio reach exceed even 70% of the highest energy value measured for a given load;
- The amount of energy consumed depends of course also on the load, but the analysis of the related influence in the situation, when generator operation is dominant, seems to be pointless.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brandstetter, P.; Vanek, J.; Verner, T. Electric vehicle energy consumption monitoring. In Proceedings of the 15th International Scientific Conference on Electric Power Engineering (EPE), Brno, Czech Republic, 12–14 May 2014; pp. 589–592. [Google Scholar]
- Chemali, E.; Preindl, M.; Malysz, P.; Emadi, A. Electrochemical and Electrostatic Energy Storage and Management Systems for Electric Drive Vehicles: State-of-the-Art Review and Future Trends. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1117–1134. [Google Scholar] [CrossRef]
- Khande, M.S.; Patil, A.S.; Andhale, G.C.; Shirsat, R.S. Design and Development of Electric scooter. IRJET 2020, 7, 359–364. [Google Scholar]
- Zoss, A.; Kazerooni, H. Design of an electrically actuated lower extremity exoskeleton. Adv. Robot. 2006, 20, 967–988. [Google Scholar] [CrossRef] [Green Version]
- Ahssan, M.R.; Ektesabi, M.; Gorji, S. Gear Ratio Optimization along with a Novel Gearshift Scheduling Strategy for a Two-Speed Transmission System in Electric Vehicle. Energies 2020, 13, 5073. [Google Scholar] [CrossRef]
- Ritari, A.; Vepsäläinen, J.; Kivekäs, K.; Tammi, K.; Laitinen, H. Energy Consumption and Lifecycle Cost Analysis of Electric City Buses with Multispeed Gearboxes. Energies 2020, 13, 2117. [Google Scholar] [CrossRef]
- Verstraten, T.; Furnémont, R.; Mathijssen, G.; Vanderborght, B.; Lefeber, D. Energy Consumption of Geared DC Motors in Dynamic Applications: Comparing Modeling Approaches. IEEE Robot. Autom. Lett. 2016, 1, 524–530. [Google Scholar] [CrossRef]
- Jatsu, S.; Savin, S.; Yatsun, A. Improvement of energy consumption for a lower limb exoskeleton through verticalization time optimization. In Proceedings of the 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; IEEE: New York, NY, USA, 2016; pp. 322–326. [Google Scholar]
- Kim, H.G.; Lee, J.W.; Jang, J.; Park, S.; Han, C. Design of an exoskeleton with minimized energy consumption based on using elastic and dissipative elements. Int. J. Control Autom. Syst. 2015, 13, 463–474. [Google Scholar] [CrossRef]
- Choromański, W. (Ed.) Ekomobilność. Tom: II. Innowacyjne Rozwiązania Poprawy i Przywracania Mobilności Człowieka. (“Eco-mobility. Volume: II. Innovative Solutions to Improve and Restore Human Mobility”); WKiŁ: Warsaw, Poland, 2015. (In Polish) [Google Scholar]
- Asbeck, A.T.; Schmidt, K.; Walsh, C.J. Soft exosuite for hip assistance. Robot. Auton. Syst. 2015, 73, 102–110. [Google Scholar] [CrossRef]
- Onen, U.; Botsali, F.M.; Kalyoncu, M.; Tinkir, M.; Yilmaz, N.; Sahin, Y. Design and actuator selection of a lower extremity exoskeleton. IEEE/ASME Trans. Mechatron. 2014, 19, 623–632. [Google Scholar] [CrossRef]
- Savin, S.; Yatsun, A.; Yatsun, S. Energy-Efficient Algorithm of Control of Exoskeleton Verticalization. J. Mach. Manuf. Reliab. 2017, 46, 512–517. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009; pp. 41–43. [Google Scholar]
- Bagiński, K.; Wierciak, J. Forming of operational characteristics of an orthotic robot by influencing parameters of its drive systems. In Progress in Automation, Robotics and Measuring Techniques, 1st ed.; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Springer: Cham, Switzerland, 2015; pp. 1–9. [Google Scholar]
- Wierciak, J.; Credo, W.; Bagiński, K. Selection of electric driving modules for orthotic robot. In Advanced Mechatronics Solutions, 1st ed.; Jabłoński, R., Březina, T., Eds.; Springer: Cham, Switzerland, 2016; pp. 297–303. [Google Scholar]
- Bagiński, K.; Cegielska, A.; Wierciak, J. Modelowanie chodu robota ortotycznego przy różnych długościach kroku. [Modelling the gait of an orthotic robot at different stride lengths]. Przegląd Elektrotechniczny 2014, 5, 82–85. (In Polish) [Google Scholar]
- Dunkermotoren. Motors, Gearboxes, Controllers 2021/22; Catalogue; Dunkermotoren: Bonndorf im Schwarzwald, Germany.
- Maxon. Precision Drive Systems. Product Range 2021/22; Catalogue; Maxon: Sachseln, Switzerland.
- Wei, C.; Hofman, T.; Ilhan Caarls, E.; van Iperen, R. A Review of the Integrated Design and Control of Electrified Vehicles. Energies 2020, 13, 5454. [Google Scholar] [CrossRef]
- Tang, Q.; Groba, Á.M.; Juárez, E.; Sanz, C.; Pescador, F. Real-Time Power-Consumption Control System for Multimedia Mobile Devices. IEEE Trans. Consum. Electron. 2016, 62, 362–370. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step Length l | Energy Consumed E | Reduction in Energy Consumption | |
|---|---|---|---|
| ig = 167 = Const. | ig Switchable | ||
| m | J | J | |
| 0.4 | 236.7 | 109.1 | 53% |
| 0.7 | 852.6 | 230.4 | 73% |
| Mass of the Weights m (kg) | Consumed Energy P1 (J) | ||
|---|---|---|---|
| is = 1:1 | is = 2:1 | is = 4:1 | |
| 0 | 3.02 | 5.30 | 8.17 |
| 5 | 1.38 | 2.15 | 4.66 |
| 10 | 3.07 | 1.40 | 2.65 |
| 15 | 5.97 | 1.37 | 1.88 |
| Mass of the Weights m (kg) | Consumed Energy P1 (J) | ||
|---|---|---|---|
| is = 1:1 | is = 2:1 | is = 4:1 | |
| 0 | 3.19 | 6.20 | 3.68 |
| 5 | 1.59 | 2.86 | 2.16 |
| 10 | 2.84 | 2.05 | 2.00 |
| 15 | 4.49 | 2.20 | 2.71 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bagiński, K.; Credo, W.; Wierciak, J.; Łuczak, S. Method of Reduction in Energy Consumption by the Drive Systems of a Mobile Device with a Controlled Gear Ratio. Energies 2022, 15, 2674. https://doi.org/10.3390/en15072674
Bagiński K, Credo W, Wierciak J, Łuczak S. Method of Reduction in Energy Consumption by the Drive Systems of a Mobile Device with a Controlled Gear Ratio. Energies. 2022; 15(7):2674. https://doi.org/10.3390/en15072674
Chicago/Turabian StyleBagiński, Karol, Wojciech Credo, Jakub Wierciak, and Sergiusz Łuczak. 2022. "Method of Reduction in Energy Consumption by the Drive Systems of a Mobile Device with a Controlled Gear Ratio" Energies 15, no. 7: 2674. https://doi.org/10.3390/en15072674
APA StyleBagiński, K., Credo, W., Wierciak, J., & Łuczak, S. (2022). Method of Reduction in Energy Consumption by the Drive Systems of a Mobile Device with a Controlled Gear Ratio. Energies, 15(7), 2674. https://doi.org/10.3390/en15072674