
A Position Sensorless Closed-Loop Control Mode of a Three-Phase Hybrid Stepper Motor


Abstract
:1. Introduction
2. Analysis of the Characteristics of 3P-HSM
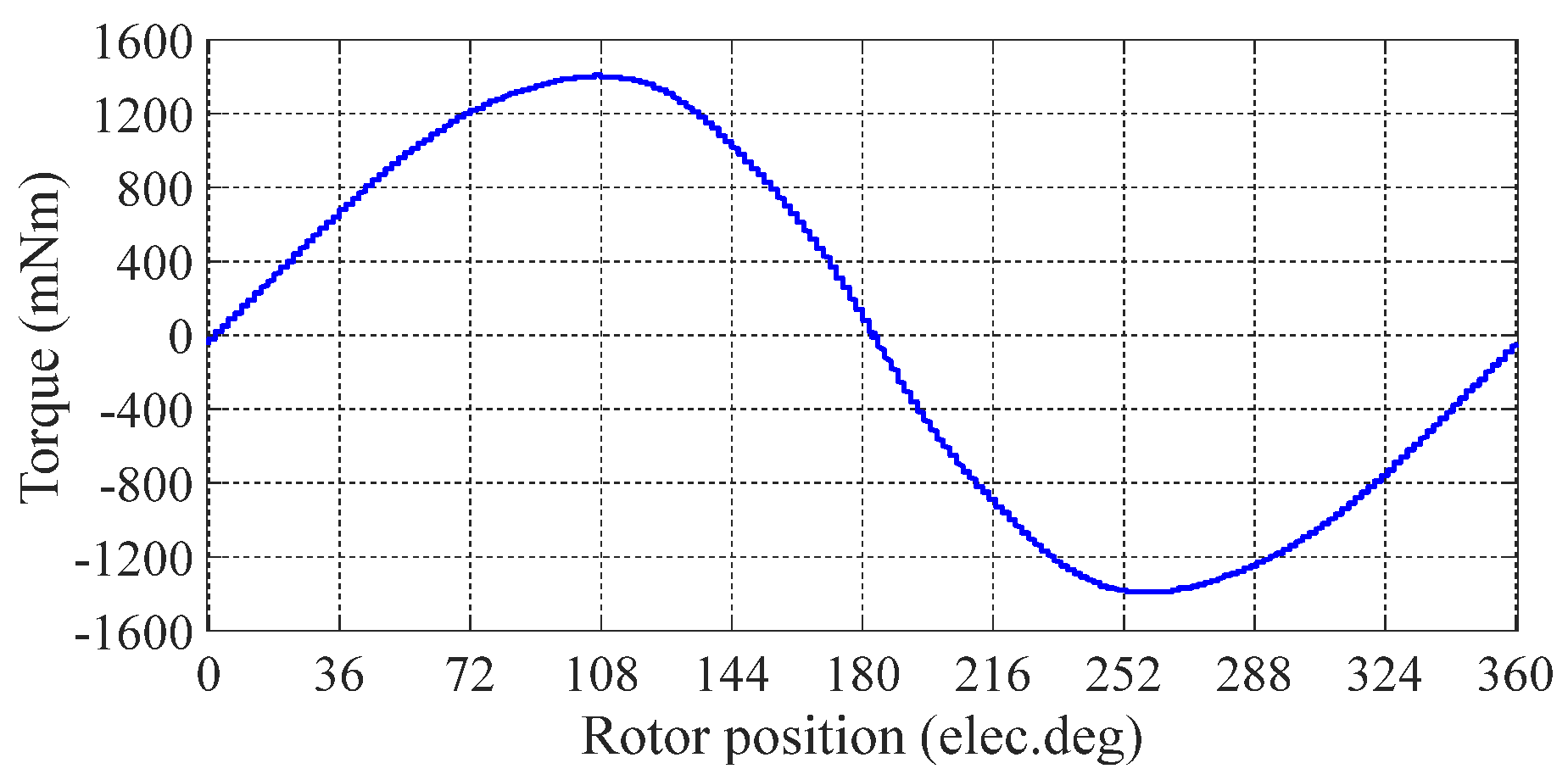
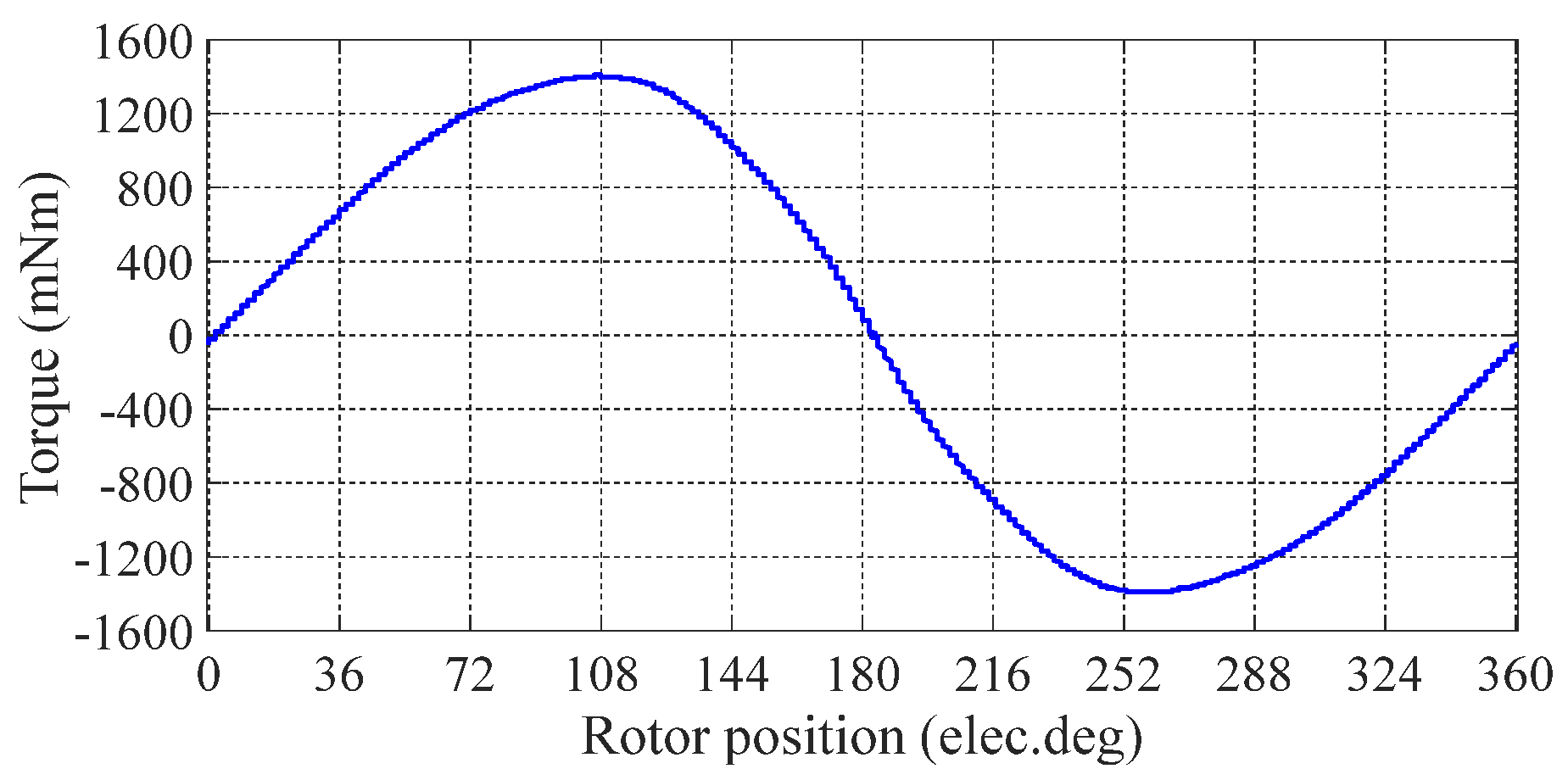
2.1. Torque Angle Characteristic of 3P-HSM
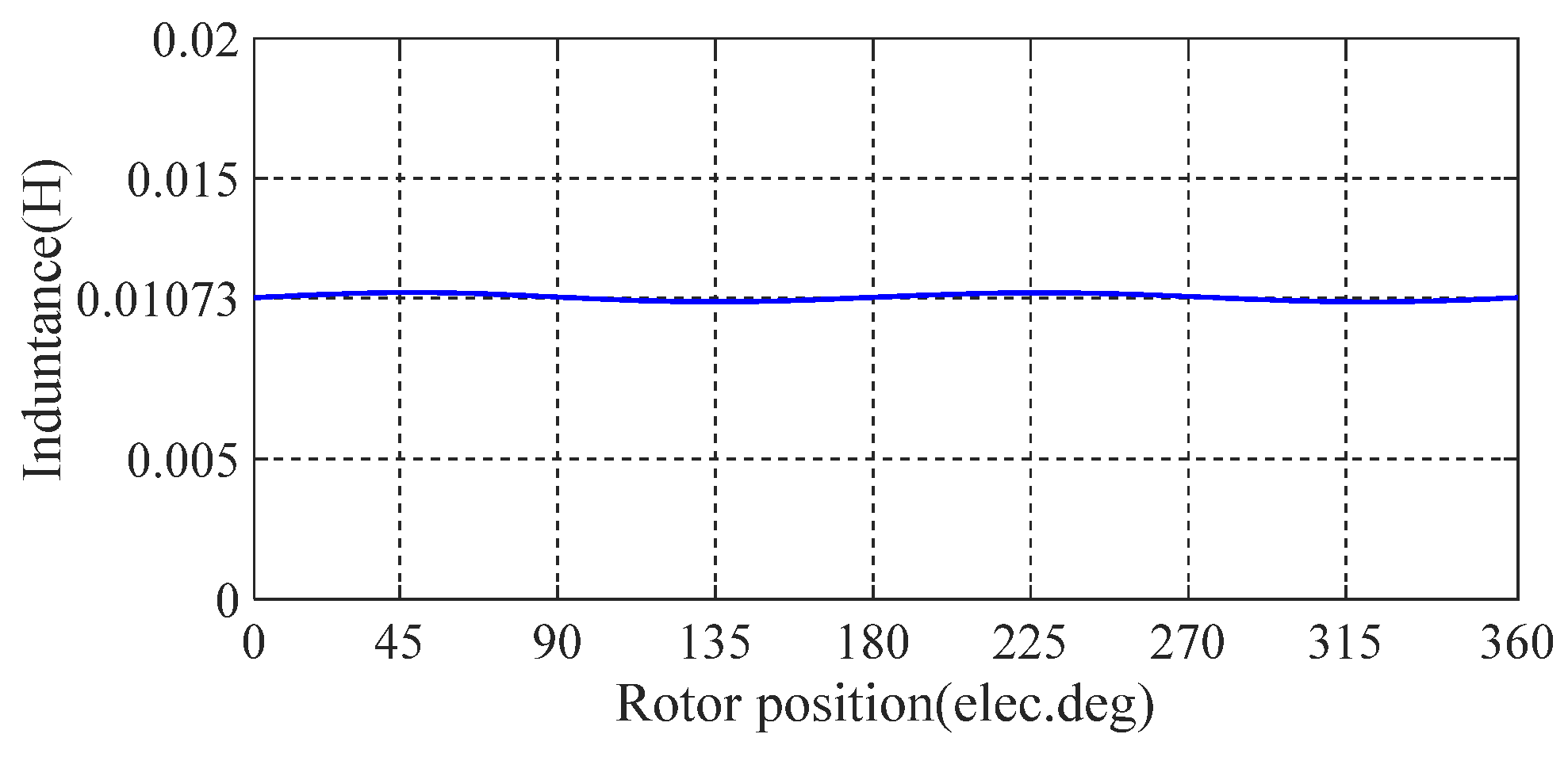
2.2. Characteristics of Motor Armature Inductance
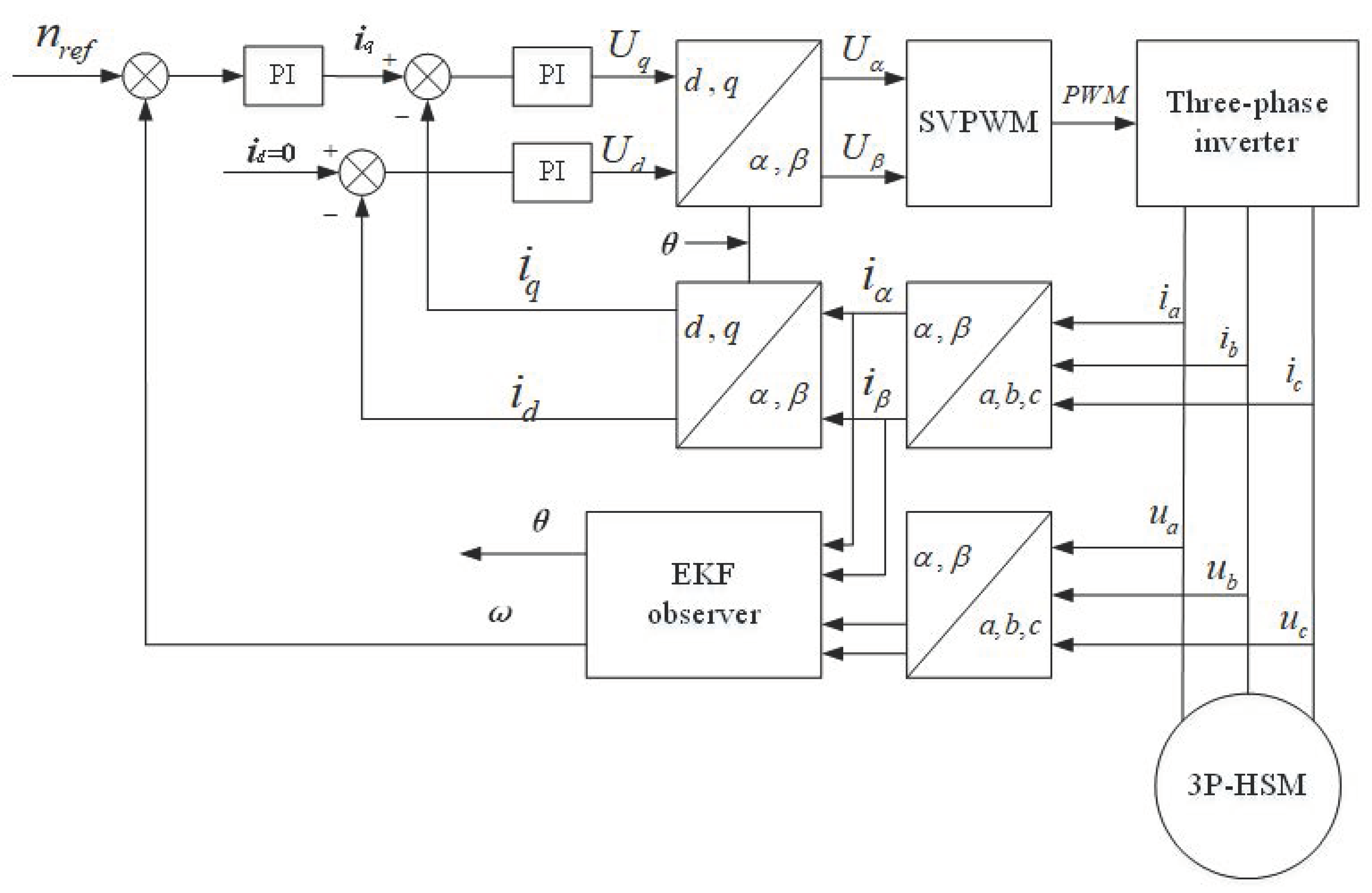
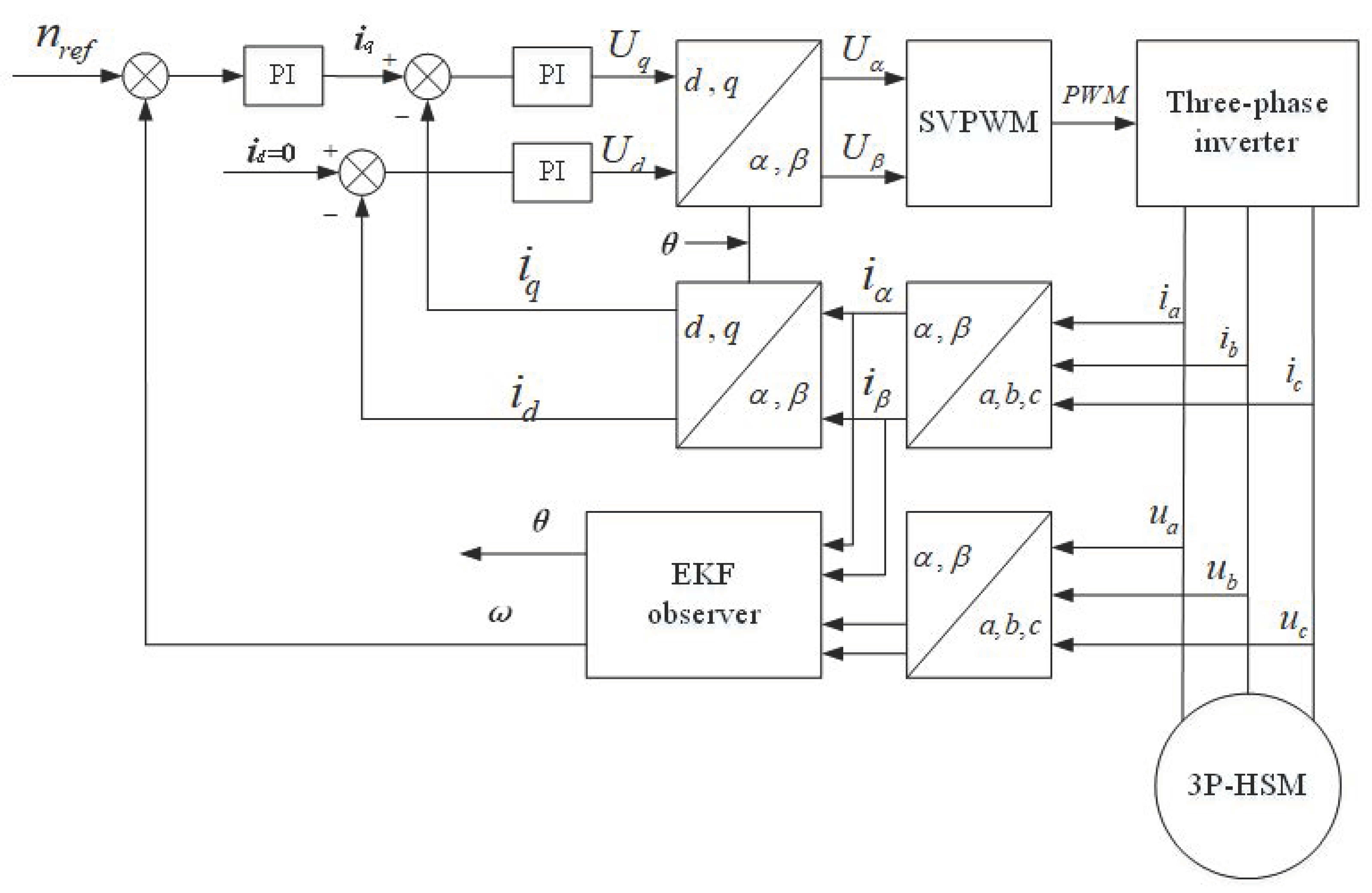
2.3. FOC of a Permanent Magnet Synchronous Motor
3. Mathematical Model and Observer Design of 3P-HSM
3.1. Mathematical Model of 3P-HSM
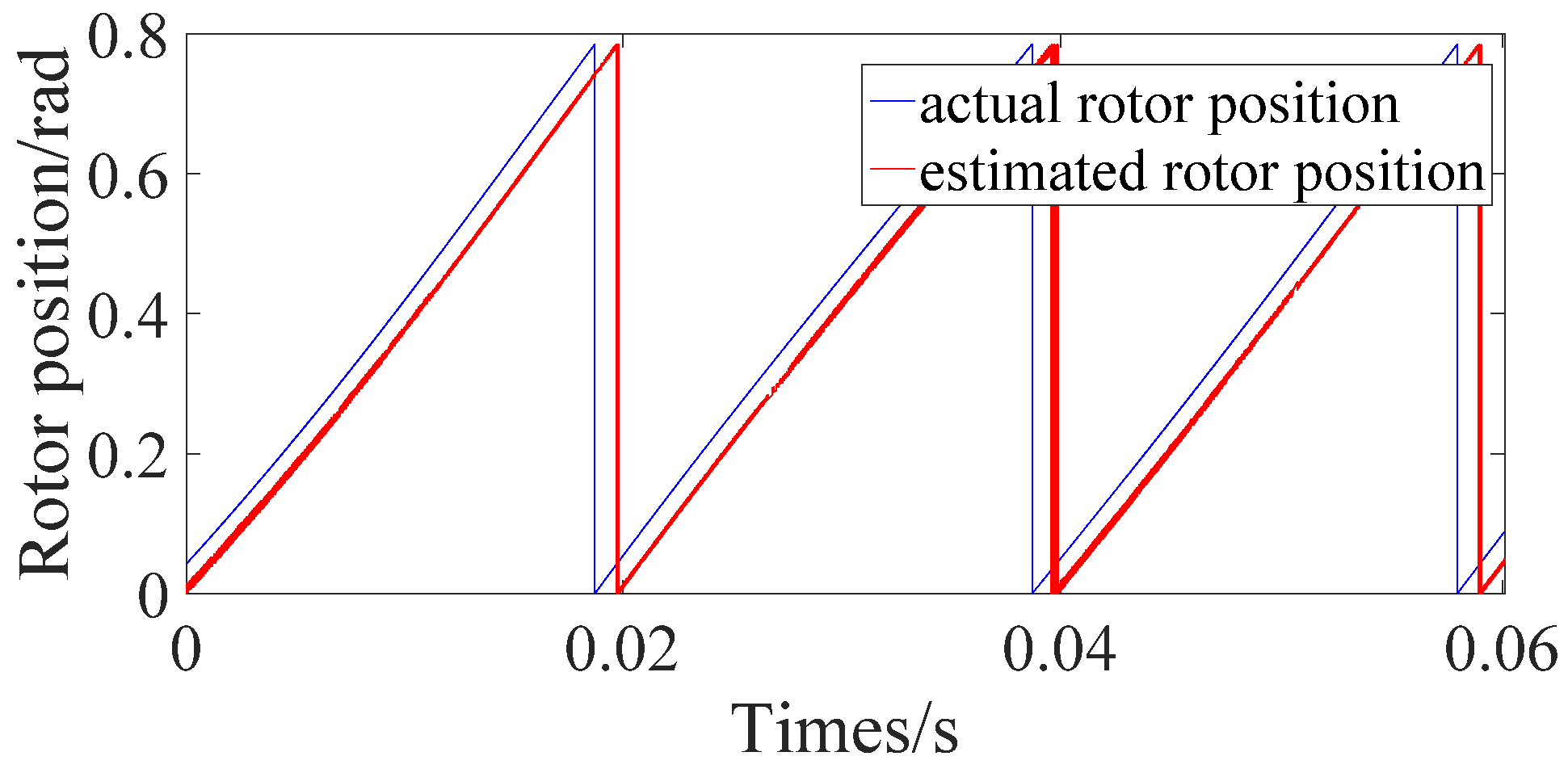
3.2. EKF Position Observer
4. Effect of SCLC Mode on Performance of 3P-HSM
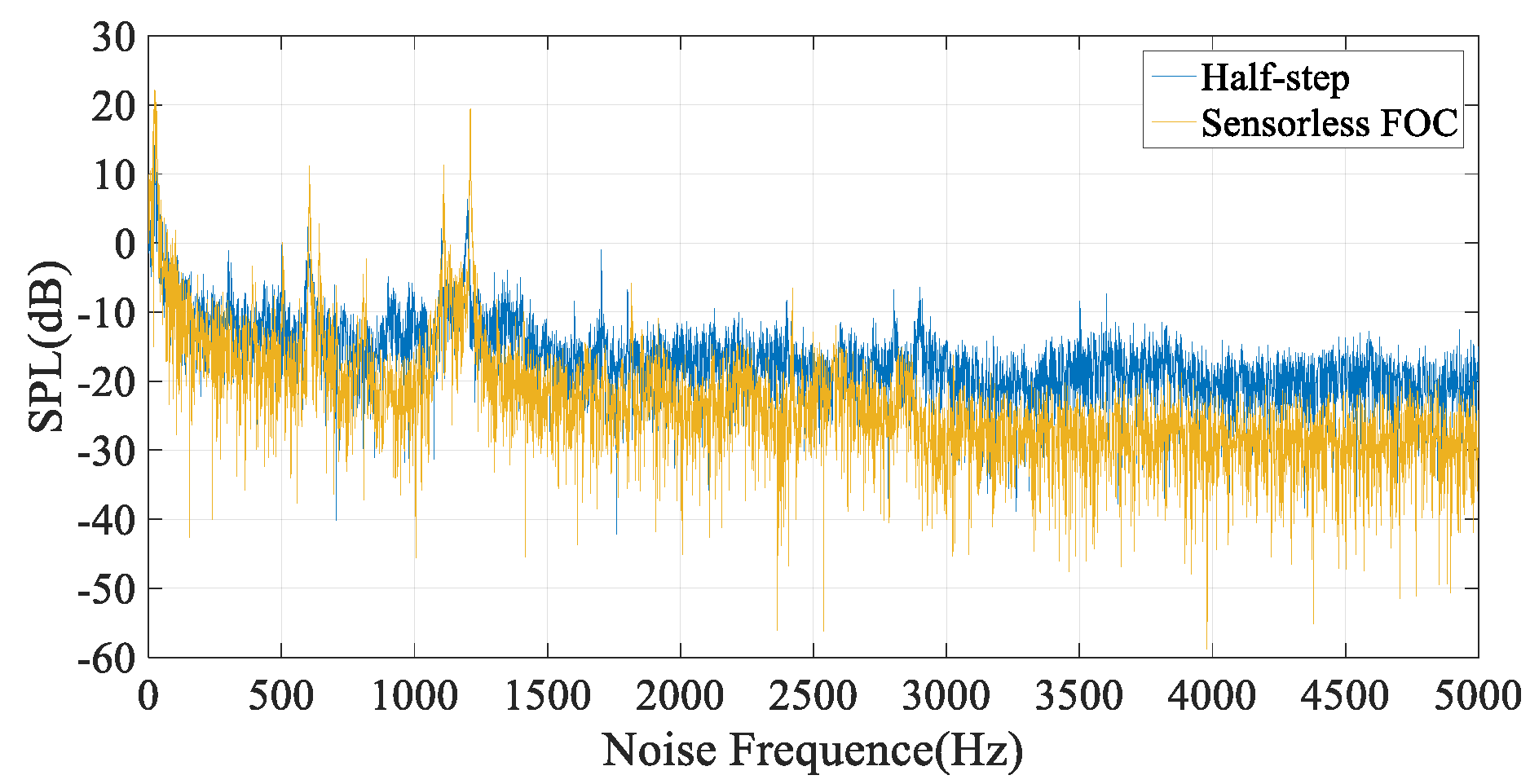
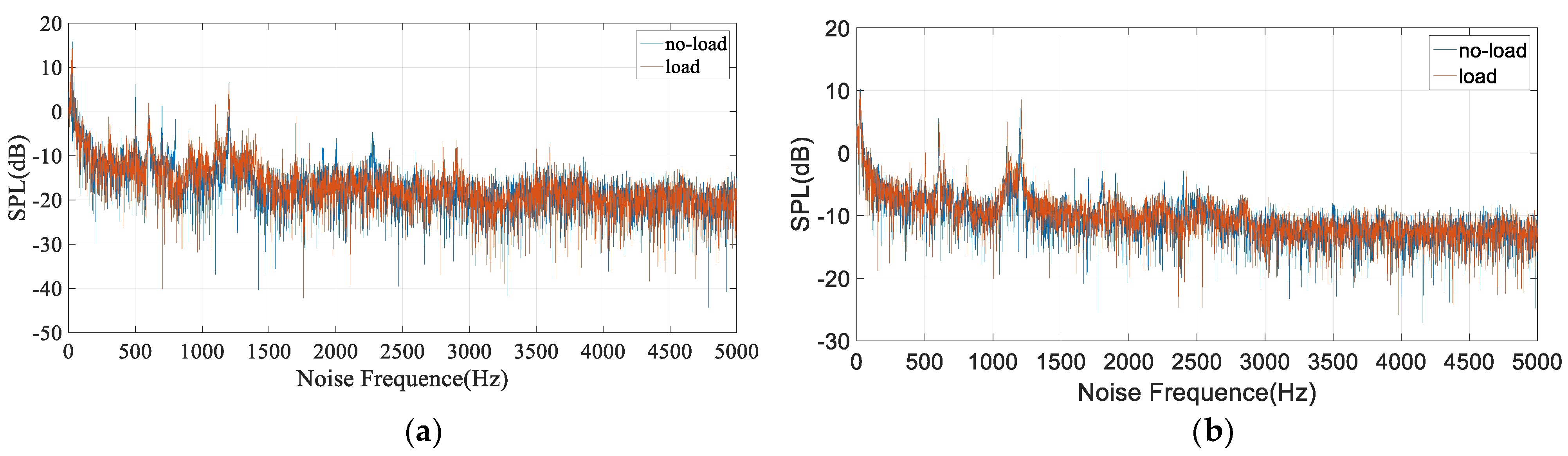
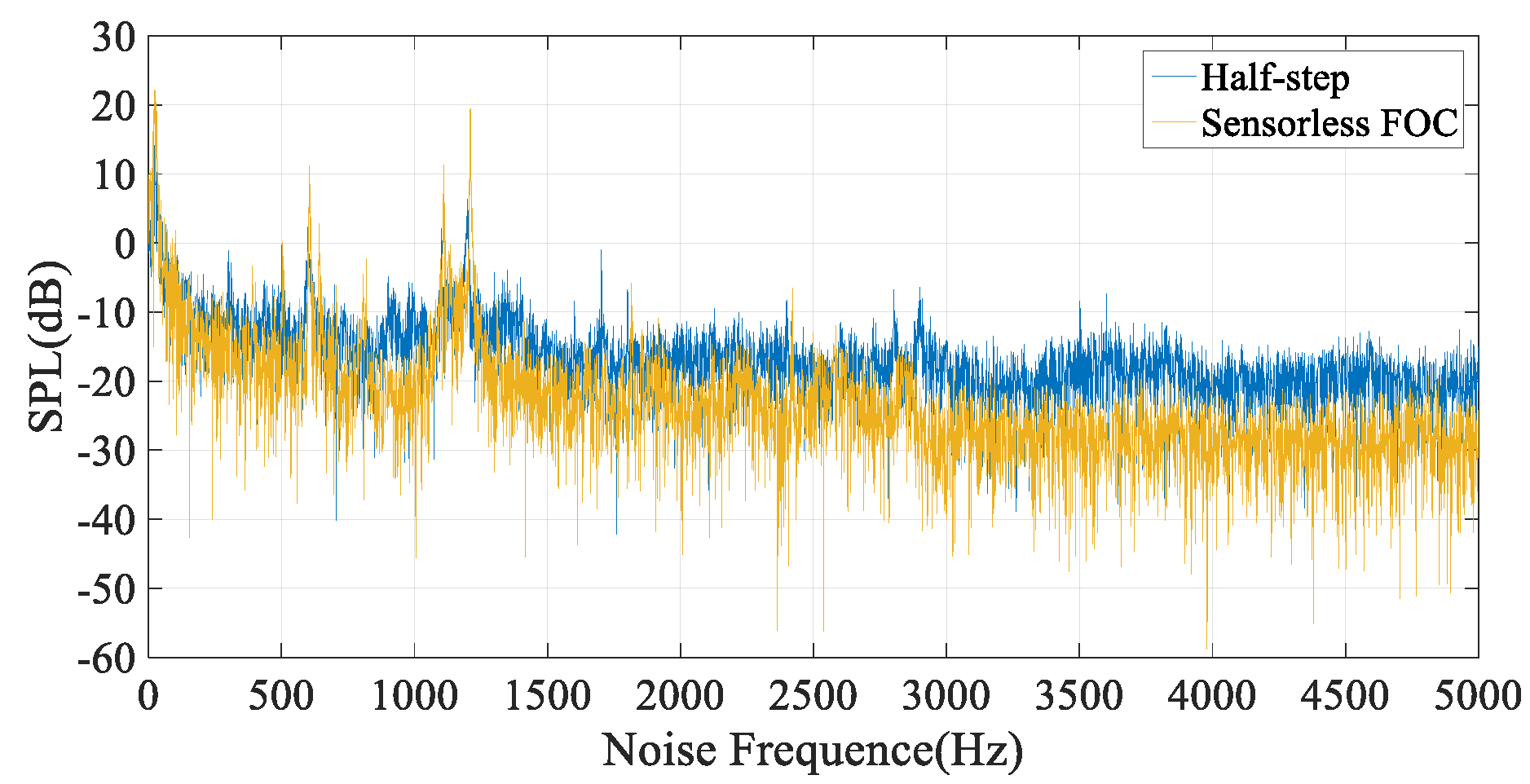
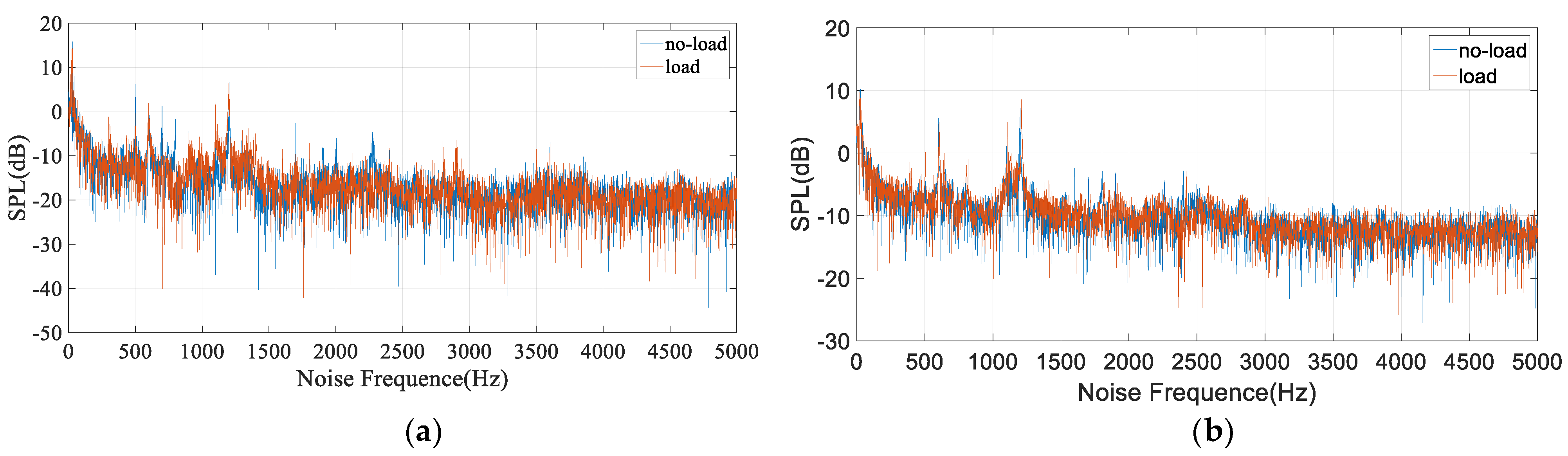
4.1. Noise Analysis
4.2. Loss Analysis
4.3. Pullout Torque Analysis
- (1)
- High speed means the high frequency of current. Due to the effect of inductance, the winding current rises relatively slowly in an electric cycle when the frequency is increased, and the effective value of the current is thus reduced. Therefore, the average EM torque of the motor is reduced.
- (2)
- The winding back-emf is increased with the increase of speed, which limits the current rising ability during open-loop operation.
5. Motor Test
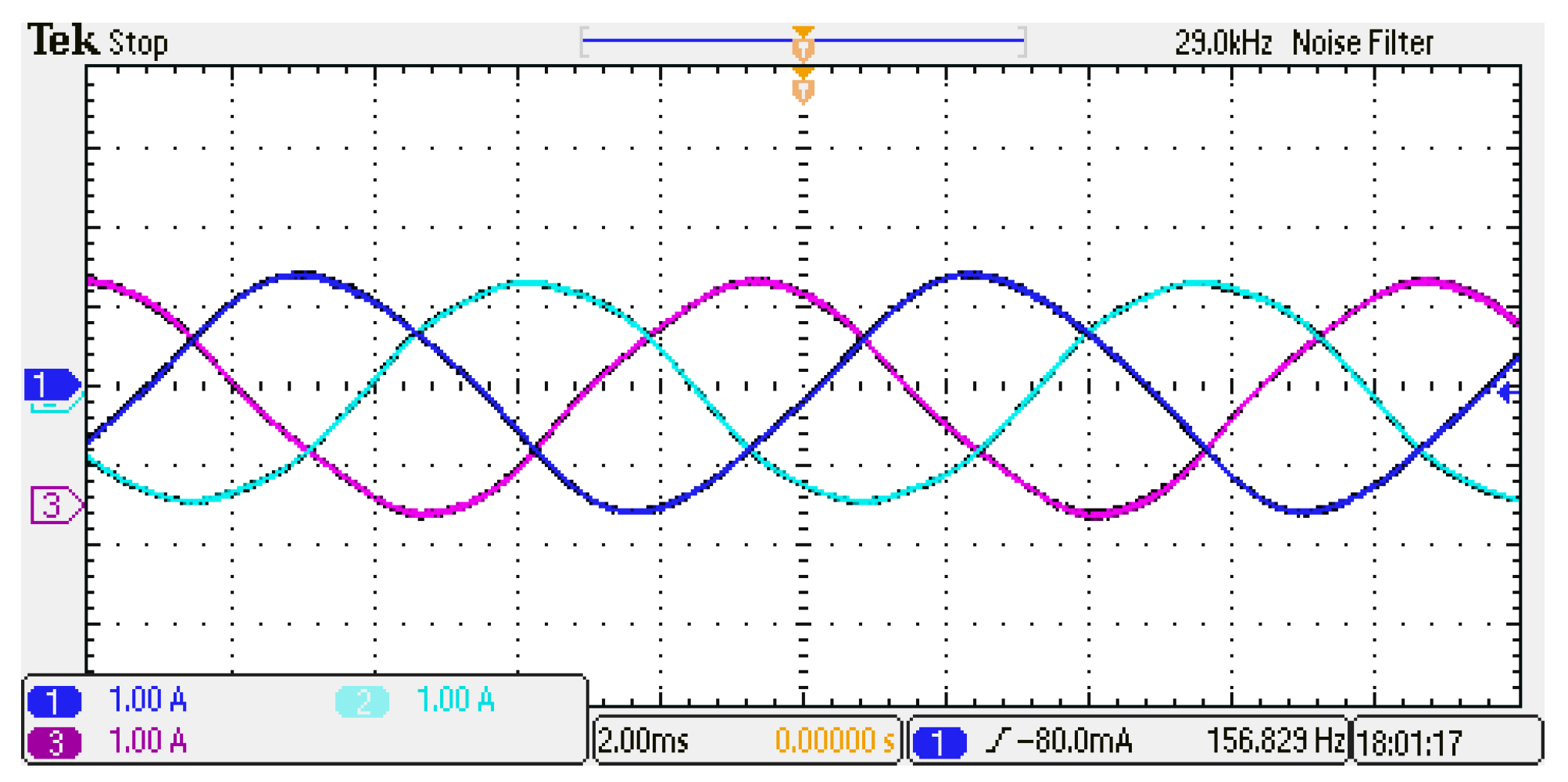
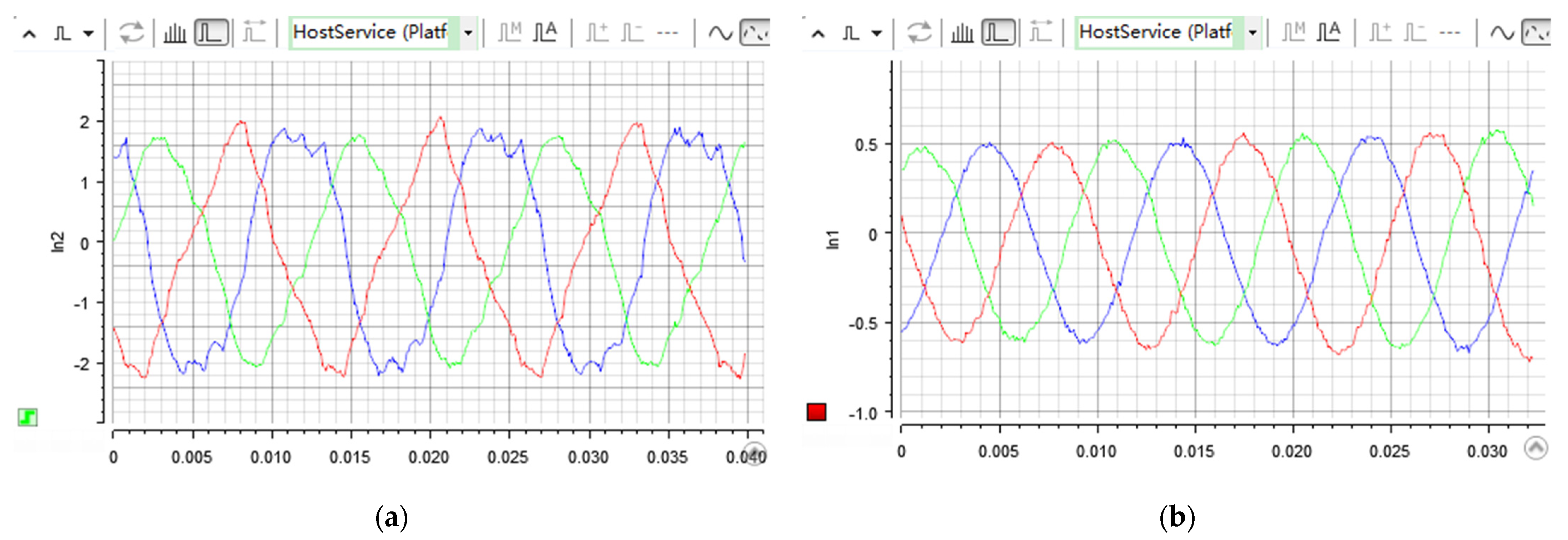
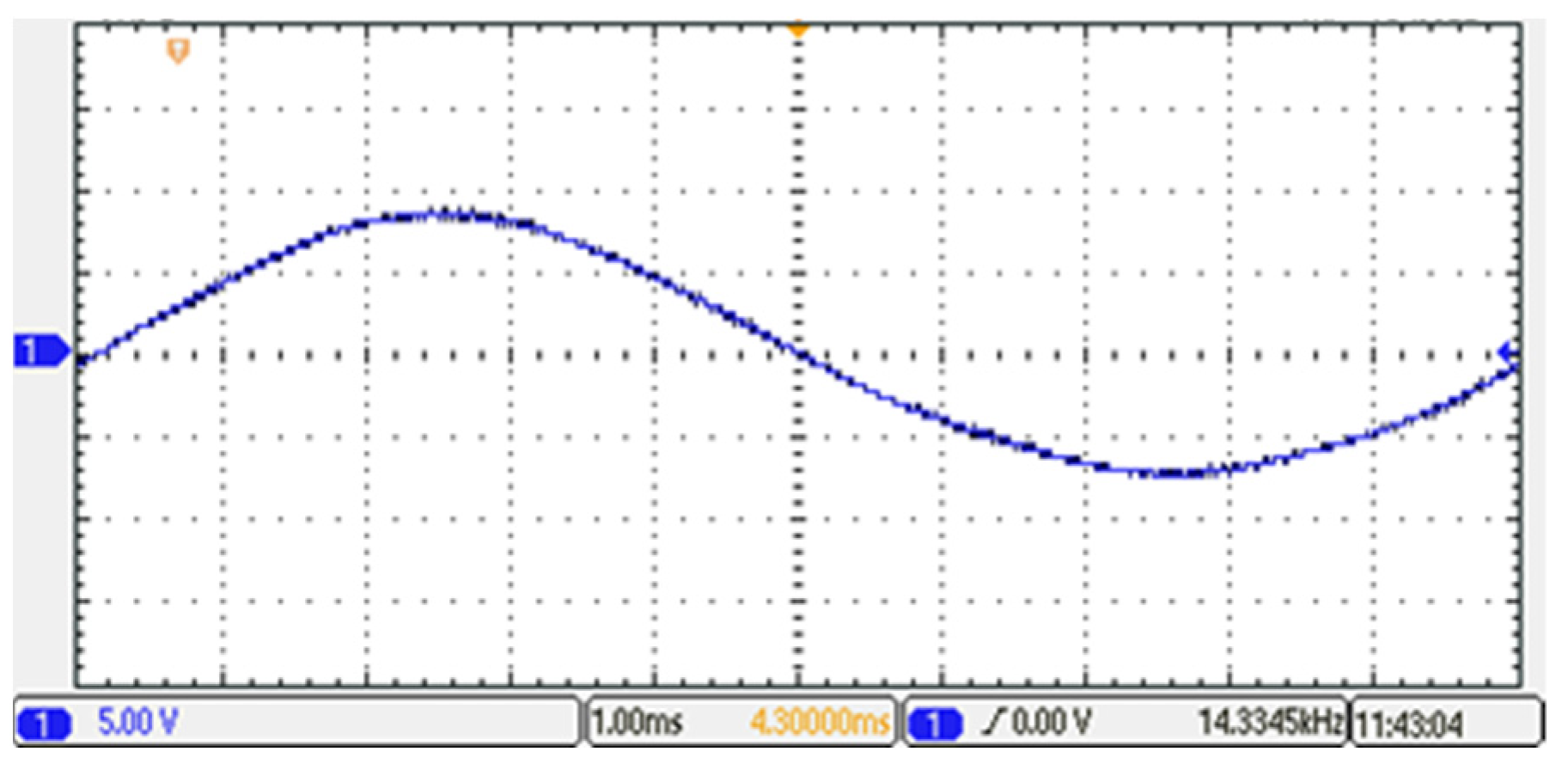
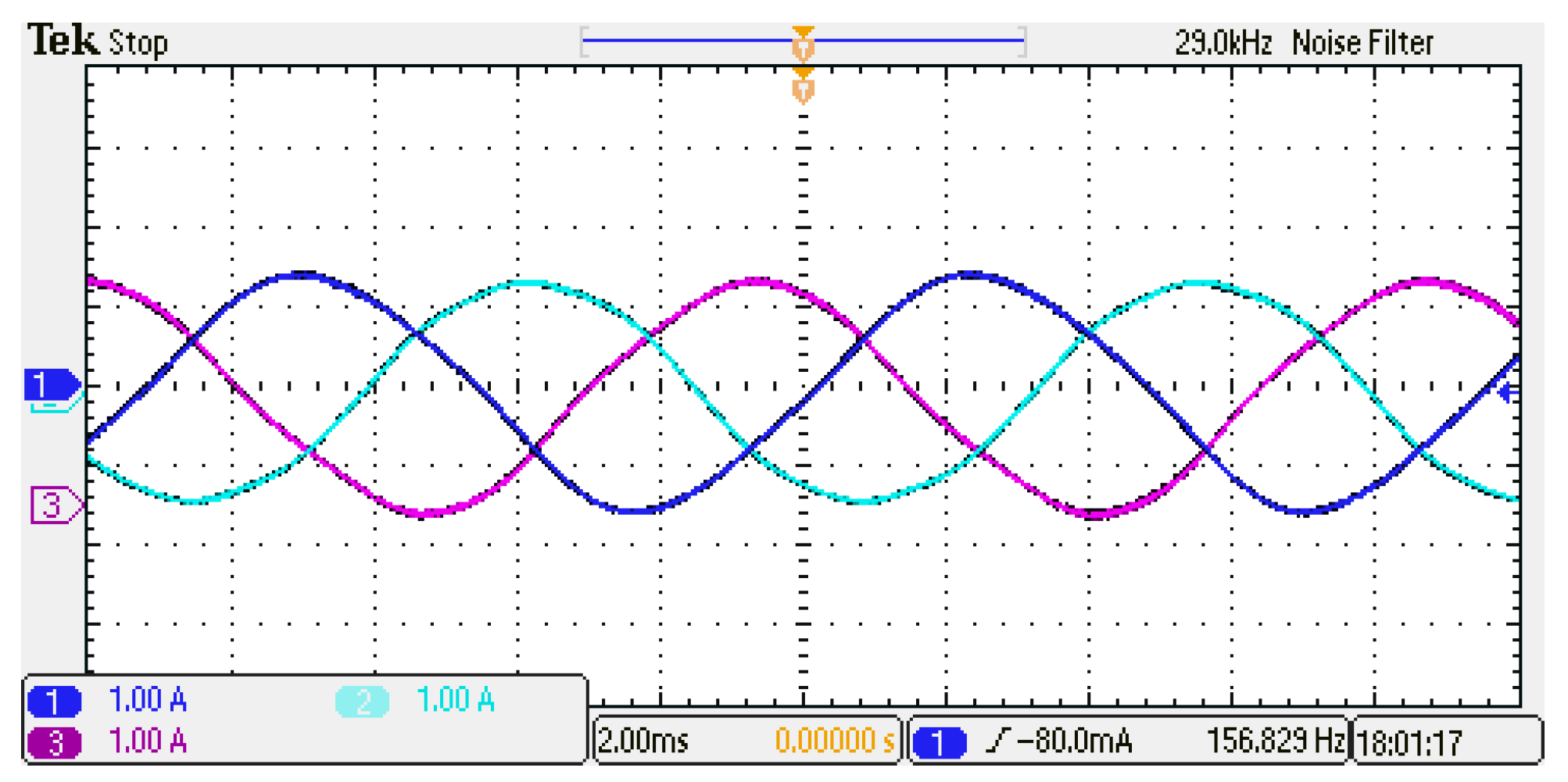
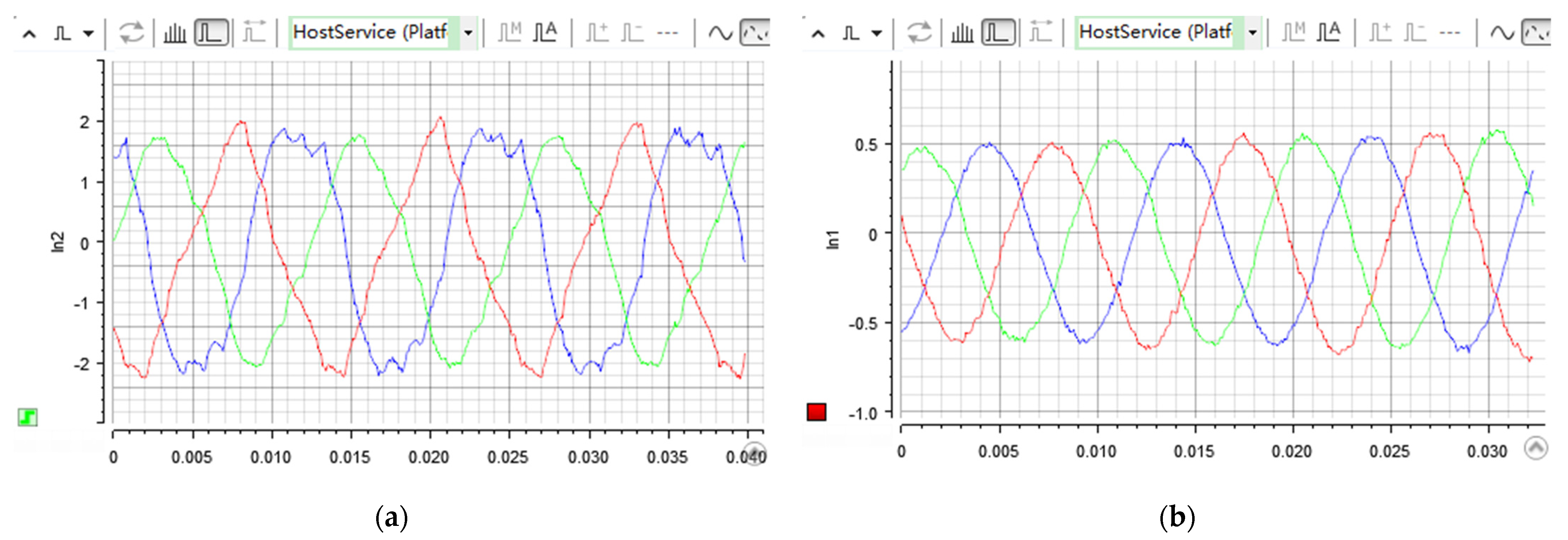
5.1. Control Current
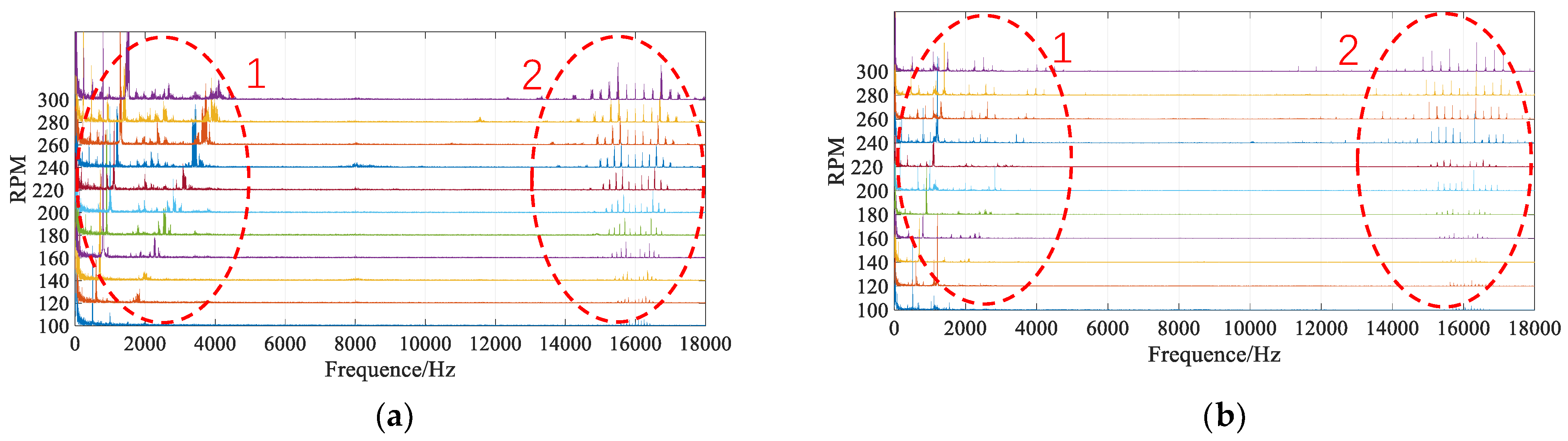
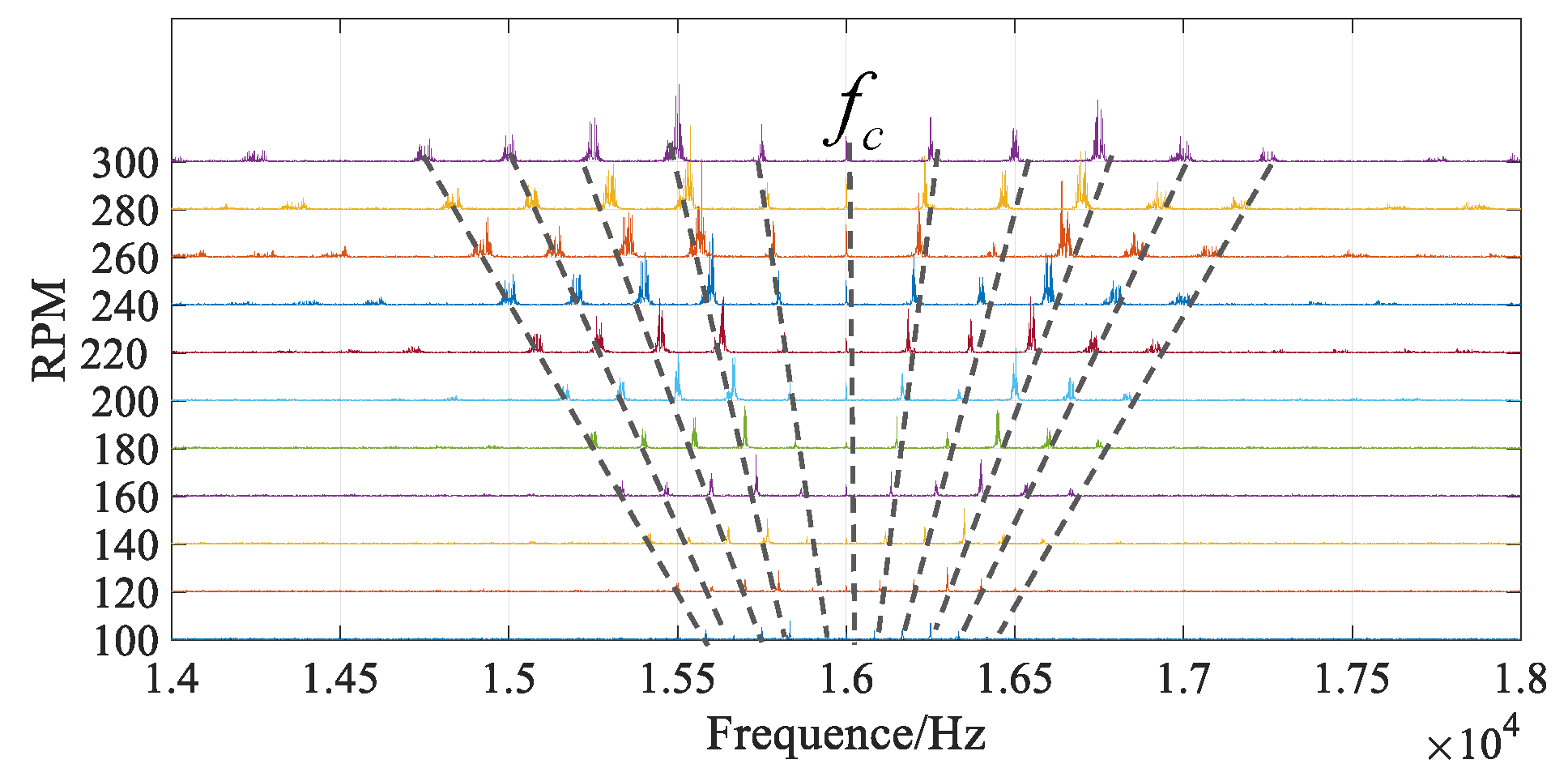
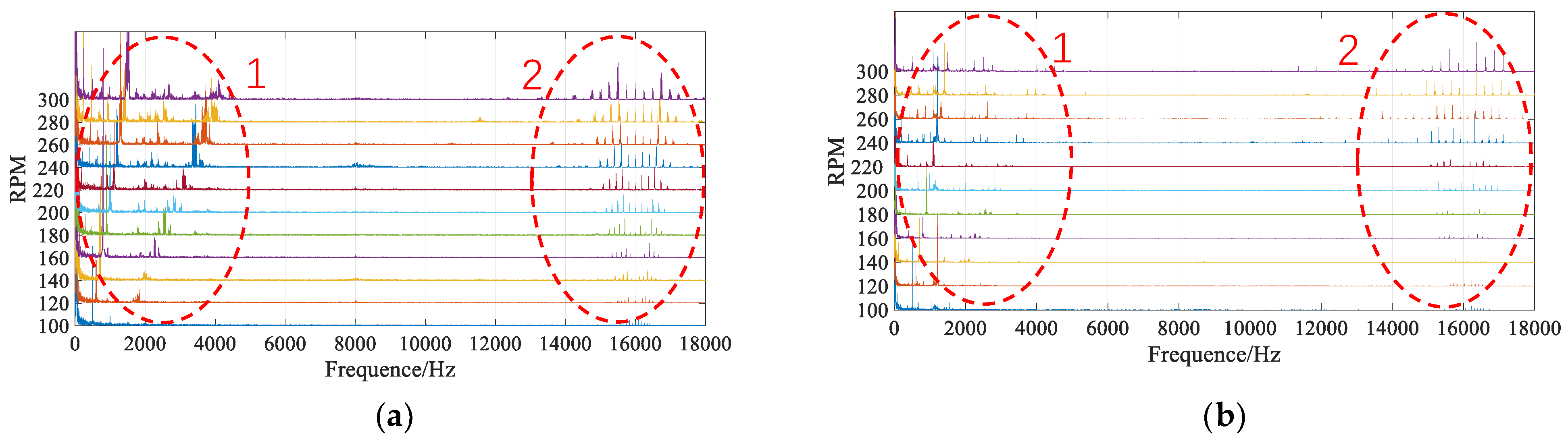
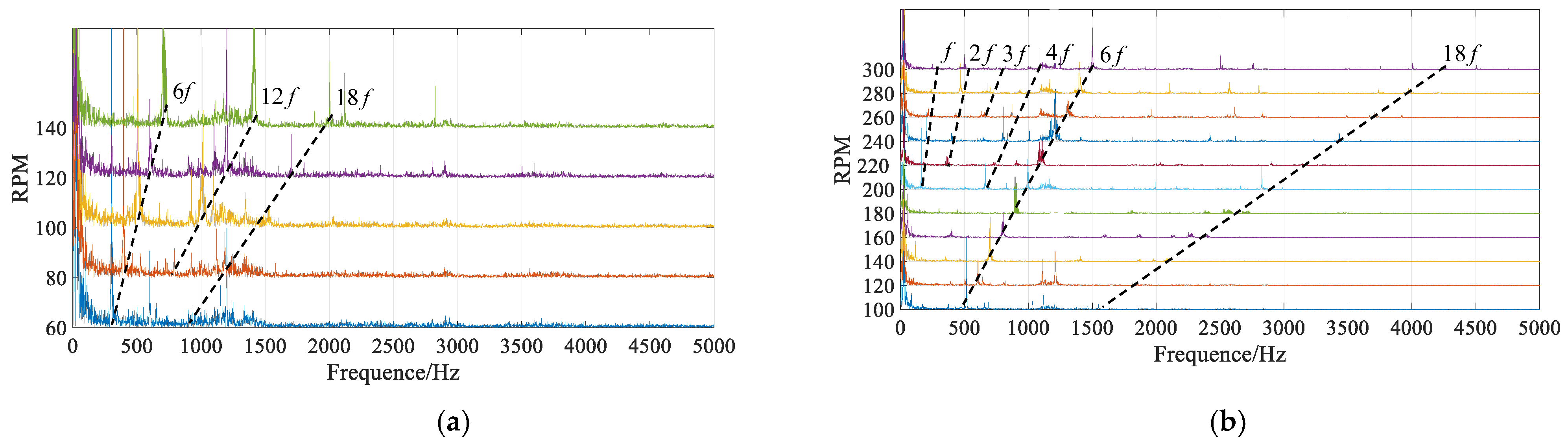
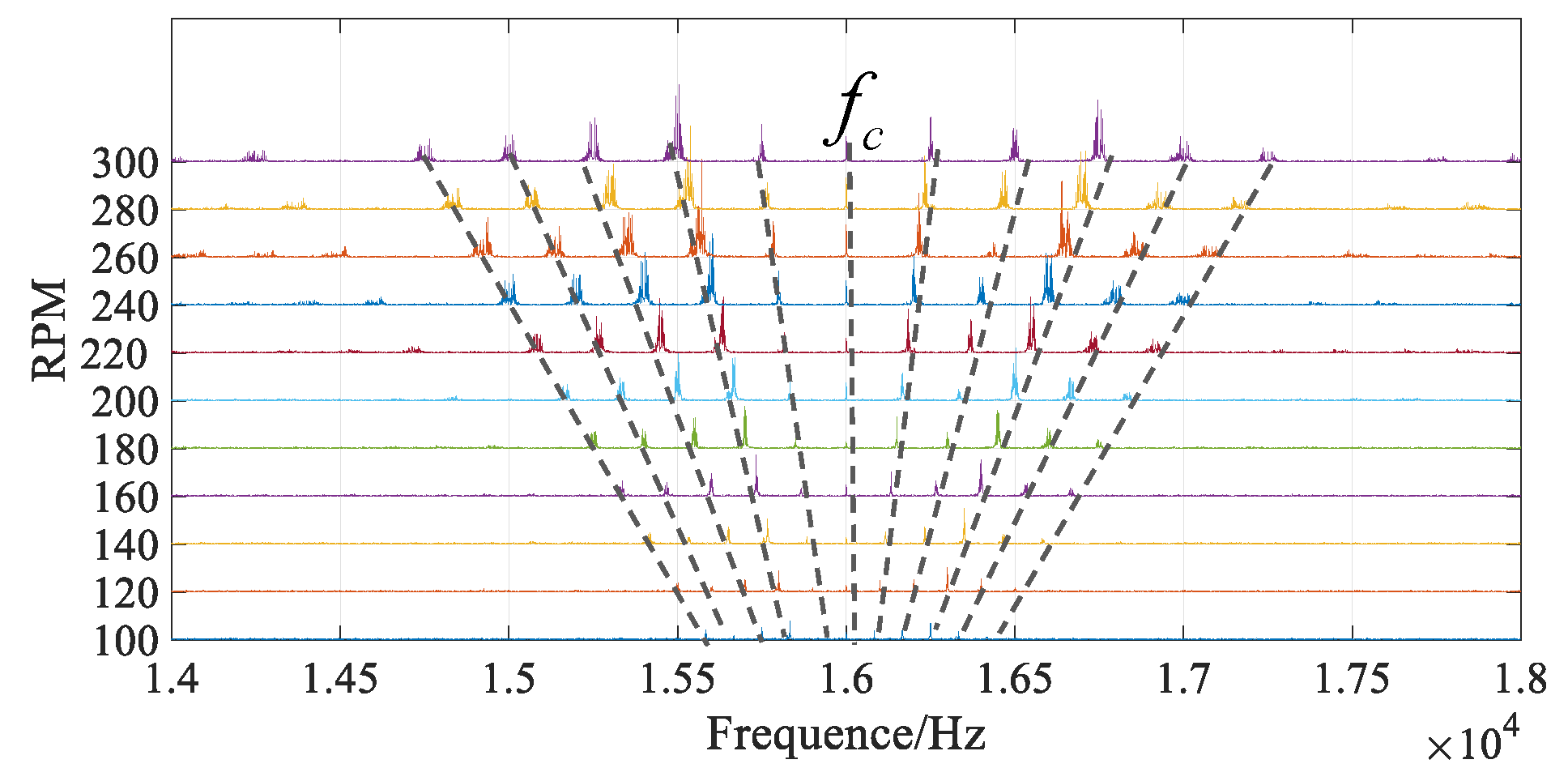
5.2. Noise Analysis with a Waterfall Plot
5.3. Motor Copper Loss Analysis
5.4. The Maximum Speed of the Motor
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Peng, Z.; Bi, C. Analysis of Drive Mode on Torque and Noise of Stepper Motor. Micromotors 2019, 52, 27–31. (In Chinese) [Google Scholar]
- Chen, L.; Yan, Z.; Liu, X. Control Motor; Xidian University Press: Xi’an, China, 2013; pp. 245–247. (In Chinese) [Google Scholar]
- Ma, X.; Bi, C. A technology for online parameter identification of permanent magnet synchronous motor. China Electrotech. Soc. Trans. Electr. Mach. Syst. 2020, 4, 237–242. [Google Scholar] [CrossRef]
- Peng, Z.; Bi, C.; Yao, K.; Fang, L. Reducing acoustic noise of 3-phase hybrid stepper motor with drive mode. Electr. Eng. 2021, 103, 1–9. [Google Scholar] [CrossRef]
- Sarr, M.P.; Ndiaye, M.F.; Dieng, B.; Thiam, A. Field oriented control of stepper motors for a mini heliostat tracking. In Proceedings of the 2021 IEEE 1st International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering MI-STA, Tripoli, Libya, 25–27 May 2021; pp. 104–109. [Google Scholar] [CrossRef]
- Son, H.U.; Jeong, Y.W.; Chung, C.C. Position Estimation of Stepping Motor Using Adaptive Gain Super Twisting Algorithm Sliding Mode Observer. In Proceedings of the 2021 21st International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 12–15 October 2021; pp. 566–570. [Google Scholar] [CrossRef]
- Bi, C.; Lin, S. Analysis of acoustic noise sources of FDB and ADB spindle motors operating at BLDC mode. In Proceedings of the 4th International Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008. [Google Scholar]
- Lin, S.; Jiang, Q.; Mamun, A.A. Effect of Drive Modes on the Acoustic Noise of Fluid Dynamic Bearing Spindle Motors. IEEE Trans. Magn. 2003, 39, 3277–3279. [Google Scholar] [CrossRef]
- Pindoriya, R.M.; Rajpurohit, B.S.; Kumar, R. A Novel Application of Harmonics Spread Spectrum Technique for Acoustic Noise and Vibration Reduction of PMSM Drive. IEEE Access 2020, 8, 103273–103284. [Google Scholar] [CrossRef]
- Tang, M.; Odhano, S.; Formentini, A.; Zanchetta, P. Reuse of a Damaged Permanent Magnet Synchronous Motor for Torque Ripple and Acoustic Noise Elimination Using a Novel Repetitive Observer. IEEE Trans. Ind. Appl. 2020, 56, 3790–3798. [Google Scholar] [CrossRef] [Green Version]
- Li, G.-J.; Liang, X.-B.; Zhu, Z.-Q.; Ojeda, J.; Gabsi, M. Vibrations and Acoustic Noise Analyses of Modular SPM Machines. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 5567–5573. [Google Scholar]
- Xiangjun, T. Learn NVH: Noise, Vibration and Harshness; Machine Press: Beijing, China, 2018; pp. 209–226. (In Chinese) [Google Scholar]
- Wang, Y.; Tian, Y.; Wang, Z. Analysis of Harmonic Electromagnetic Torques of Hybrid Stepping Motors. Trans. China Electrotech. Soc. 2002, 17, 17–20. (In Chinese) [Google Scholar]
- Yu, Y.; Chai, F.; Cheng, S. Analysis of modulation pattern and losses in inverter for PMSM drives. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–4. [Google Scholar]
- Chengyuan, W.; Jiakuan, X.; Yibiao, S. Modern Motor Control Technology; Machine Press: Beijing, China, 2014. (In Chinese) [Google Scholar]
- de Viaene, J.; Ceulemans, D.; Derammelaere, S.; Haemers, M.; Stockman, K. Improved dynamic behaviour of a sensorless stepping motor load angle estimator based on Transfer Function Analyzer technique. In Proceedings of the 2021 23rd European Conference on Power Electronics and Applications (EPE’21 ECCE Europe), Ghent, Belgium, 6–10 September 2021; pp. 1–10. [Google Scholar]
- Yunmiu, T. Electrical Machinery; Machine Press: Beijing, China, 2014; pp. 283–285. (In Chinese) [Google Scholar]
- Apte, A.; Joshi, V.A.; Mehta, H.; Walambe, R. Disturbance-Observer-Based Sensorless Control of PMSM Using Integral State Feedback Controller. IEEE Trans. Power Electron. 2019, 35, 6082–6090. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Electrical Machines and Drives for Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Li, Z. Study on driving system of three-phase hybrid stepping motor. In Proceedings of the Sixth International Conference on Electrical Machines and Systems, Beijing, China, 9–11 November 2003. [Google Scholar]
- Ton, T.-D.; Hsieh, M.-F.; Chen, P.-H. A Novel Robust Sensorless Technique for Field-Oriented Control Drive of Permanent Magnet Synchronous Motor. IEEE Access 2021, 9, 100882–100894. [Google Scholar] [CrossRef]
- Podder, A.; Pandit, D. Study of Sensorless Field-Oriented Control of SPMSM Using Rotor Flux Observer & Disturbance Observer Based Discrete Sliding Mode Observer. In Proceedings of the 2021 IEEE 22nd Workshop on Control and Modelling of Power Electronics (COMPEL), Cartagena, Colombia, 2–5 November 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, Z.; Liu, C.; Zhang, M.; Liu, X.; Jiang, M.; Zhang, Z. The Field-Orientated-Control Algorithm for Permanent Magnet Synchronous Motor in 60° Coordinate System. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Korea, 31 October–3 November 2021; pp. 1829–1832. [Google Scholar] [CrossRef]
- Bae, J.; Lee, D. Position Control of a Rail Guided Mover Using a Low-Cost BLDC Motor. IEEE Trans. Ind. Appl. 2018, 54, 2392–2399. [Google Scholar] [CrossRef]
- Tang, Z.; Akin, B. A New LMS Algorithm Based Deadtime Compensation Method for PMSM FOC Drives. IEEE Trans. Ind. Appl. 2018, 54, 6472–6484. [Google Scholar] [CrossRef]
- Zhurov; Bayda, S.; Florentsev, S. Field-Oriented Control of the Cargo Locomotive Induction Motor Electric Drive When Using Single Power Converter Feeding Two Traction Motors. In Proceedings of the 2021 International Conference on Electrotechnical Complexes and Systems (ICOECS), Ufa, Russian Federation, 16–18 November 2021 ; pp. 37–42. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Cheng, M.; Chau, K.T. Field-Oriented Control and Direct Torque Control for Paralleled VSIs Fed PMSM Drives with Variable Switching Frequencies. IEEE Trans. Power Electron. 2015, 31, 2417–2428. [Google Scholar] [CrossRef]
- Luo, P.; Xu, J.; Liu, H.; Huang, H.; Yang, Y.; Yu, Y. An Integrated Vector Control Strategy for BLDC Current. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 1666–1670. [Google Scholar]
- Cui, B.; Fang, L.L.; Jiang, Q.; Bi, C. A Comparative Study of High-Speed Position Sensorless Control Technology in Surface Mounted Permanent Magnet Synchronous Motors. Electron. Sci. Technol. 2021, 34, 8–17. (In Chinese) [Google Scholar]
- Bi, C.; Phyu, H.N.; Jiang, Q. Unbalanced magnetic pull induced by leading wires of permanent magnet synchronous motor. In Proceedings of the 2009 International Conference on Electrical Machines and Systems, Tokio, Japan, 15–18 November 2009. [Google Scholar]
- Pindoriya, R.M.; Gautam, G.; Rajpurohit, B.S. A Novel Application of Pseudorandom-Based Technique for Acoustic Noise and Vibration Reduction of PMSM Drive. IEEE Trans. Ind. Appl. 2020, 56, 5511–5522. [Google Scholar] [CrossRef]
- Odabaşı, T.; Tap, A.; Ergene, L.T. Simulation and Design of a Sensorless FOC Driver for a PMSM used in Compressor. In Proceedings of the 2021 3rd Global Power, Energy and Communication Conference (GPECOM), Antalya, Turkey, 5–8 October 2021; pp. 97–102. [Google Scholar] [CrossRef]
- Lixiang, S.; Xiaoyan, Z. Loss Analysis of Permanent Magnet Synchronous Motor. Electr. Technol. 2019, 20, 158–161. (In Chinese) [Google Scholar]
- Rong, X. Loss analysis and temperature calculation of permanent magnet synchronous motor. Shanghai SDJJ 2017, 8, 8–15. (In Chinese) [Google Scholar]
- Acarnley, P. Stepping Motors: A Guide to Modern Theory and Practice; IET: London, UK, 2002; pp. 41–58. [Google Scholar]
- Russell, A.; Pickup, I. A circuital method for the prediction of pull-out torque characteristics of hybrid stepping motors. IEE Proc. B Electr. Power Appl. 1982, 129, 330–336. [Google Scholar] [CrossRef]
- Kangning, C.U.I.; Shenbo, Y.U.; Rutong, D.O.U.; Pengpeng, X.I.A. Reduction Method of Torque Ripple and Vibration and Noise of Permanent Magnet Synchronous Motor. Micromotors 2020, 53, 11–16. [Google Scholar]
- Vijayraghavan, P.; Krishnan, R. Noise in electric machines: A review. IEEE Trans. Ind. Appl. 1999, 35, 1007–1013. [Google Scholar] [CrossRef]
- Guan, Q.; Liu, J.; Zhou, Y.; Qiu, H. The Vector Control Research and Implementation of the Three-Phase Hybrid Stepping Motor. In Proceedings of the 2016 International Conference on Industrial Informatics—Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), Wuhan, China, 3–4 December 2016; pp. 384–387. [Google Scholar]
- Pantano, M.N.; Puchol, M.C.F.; Rossomando, F.G.; Scaglia, G.J.E. Open-Loop Dynamic Optimization for Nonlinear Multi-Input Systems. Application to Recombinant Protein Production. IEEE Latin Am. Trans. 2021, 19, 1307–1314. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Equipment | Company | Type |
|---|---|---|
| Controller | dSPACE | RTI1202 |
| Sound card | iCON | MicU |
| Microphone | Behringer | ECM8000 |
| Decibel meter | Aihua | AWA5661 |
| Parameters | Values |
|---|---|
| Rated current (Amp) | 5.8 |
| Holding torque (Nm) | 1.4 |
| Phase resistance (ohm) | 4.13 |
| Phase inductance (mH) | 10.7 |
| Rotor inertia (g·cm2) | 460 |
| Back-emf (V/1000 rpm) | 46.2 |
| Idle | Phase Current/A | Ratio | Copper Loss/W | Ratio |
|---|---|---|---|---|
| Sensorless FOC | 0.3 | 20% | 1.107 | 4% |
| Half-step subdivision | 1.5 | 100% | 27.675 | 100% |
| Load (0.14 Nm) | Phase Current/A | Ratio | Copper Loss/W | Ratio |
|---|---|---|---|---|
| Sensorless FOC | 0.5 | 29.4% | 3.075 | 8.6% |
| Half-step subdivision | 1.7 | 100% | 35.55 | 100% |
| Operating States | Max Speed/rpm | Phase Current/A |
|---|---|---|
| Half-step for idle | 185 | 1.5 |
| Sensorless FOC for idle | 670 | 0.3 |
| Operating States | Max Speed/rpm | Phase Current/A |
|---|---|---|
| Half-step for load (0.14 Nm) | 153 | 1.7 |
| Sensorless FOC for load (0.14 Nm) | 630 | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Z.; Bi, C. A Position Sensorless Closed-Loop Control Mode of a Three-Phase Hybrid Stepper Motor. Energies 2022, 15, 804. https://doi.org/10.3390/en15030804
Peng Z, Bi C. A Position Sensorless Closed-Loop Control Mode of a Three-Phase Hybrid Stepper Motor. Energies. 2022; 15(3):804. https://doi.org/10.3390/en15030804
Chicago/Turabian StylePeng, Zhen, and Chao Bi. 2022. "A Position Sensorless Closed-Loop Control Mode of a Three-Phase Hybrid Stepper Motor" Energies 15, no. 3: 804. https://doi.org/10.3390/en15030804
APA StylePeng, Z., & Bi, C. (2022). A Position Sensorless Closed-Loop Control Mode of a Three-Phase Hybrid Stepper Motor. Energies, 15(3), 804. https://doi.org/10.3390/en15030804