
Model Predictive Voltage Control of Uninterruptible Power Supply Based on Extended-State Observer

Abstract
:1. Introduction
- The influence of LC filter parameter mismatch on output voltage is evaluated;
- The design process of an extended-state observer is described in detail;
- Compared with traditional finite-set model predictive voltage control, the proposed finite-set model predictive voltage control method has better stability and parameter robustness;
- In the case of parameter mismatch, the robustness of the proposed finite-set model predictive control is verified through simulations and experiments, which proves the effectiveness of the method.
2. Traditional Model Predictive Voltage Control
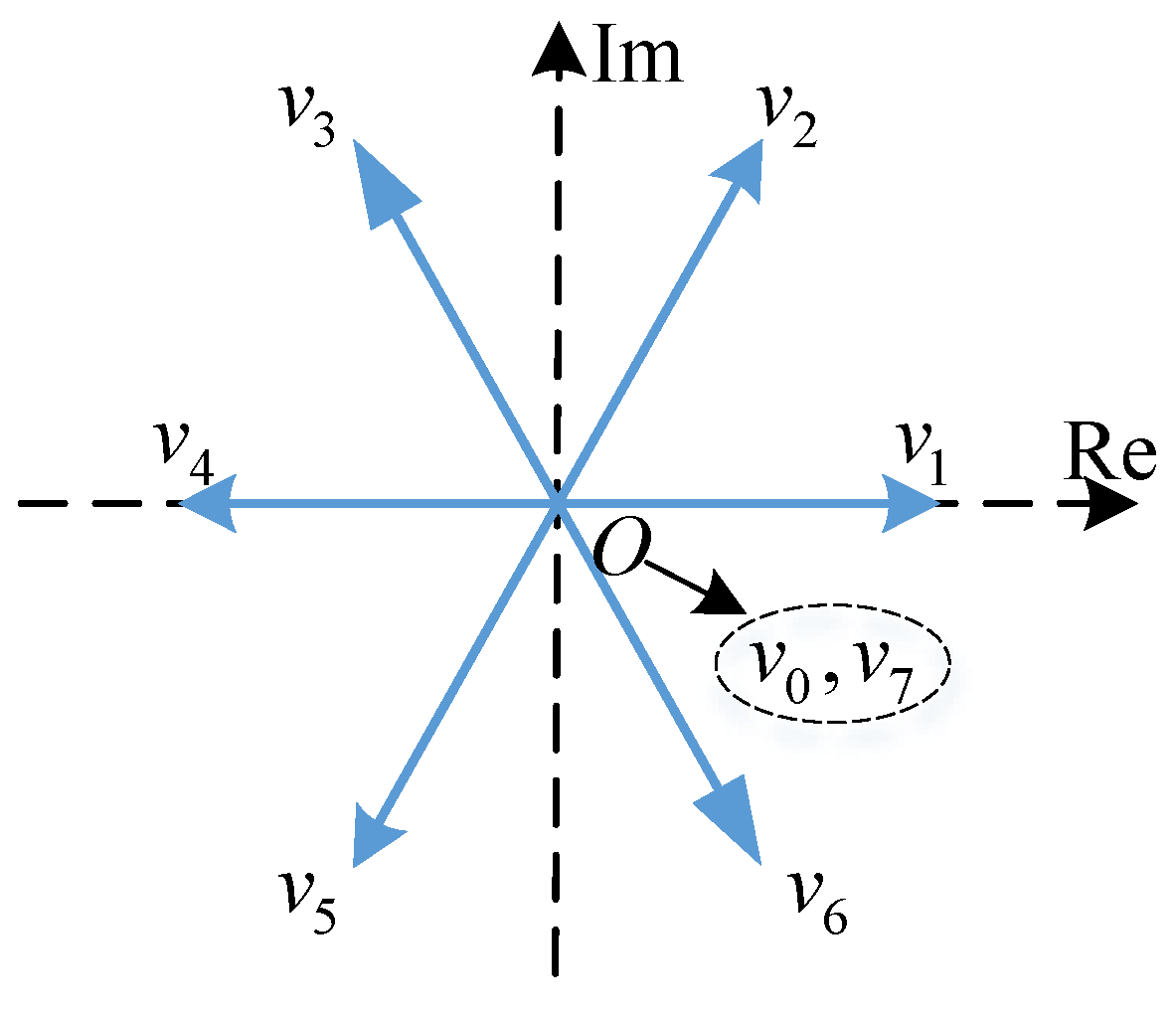
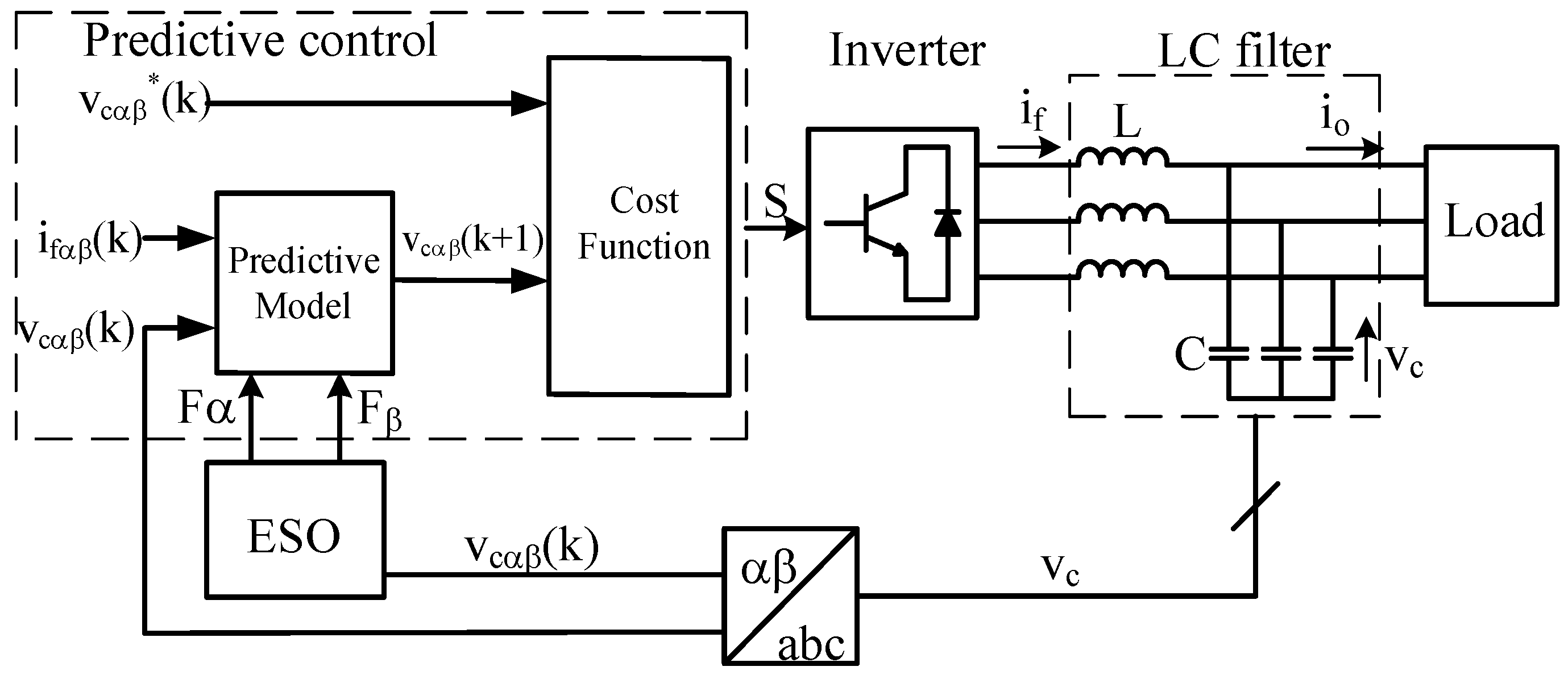
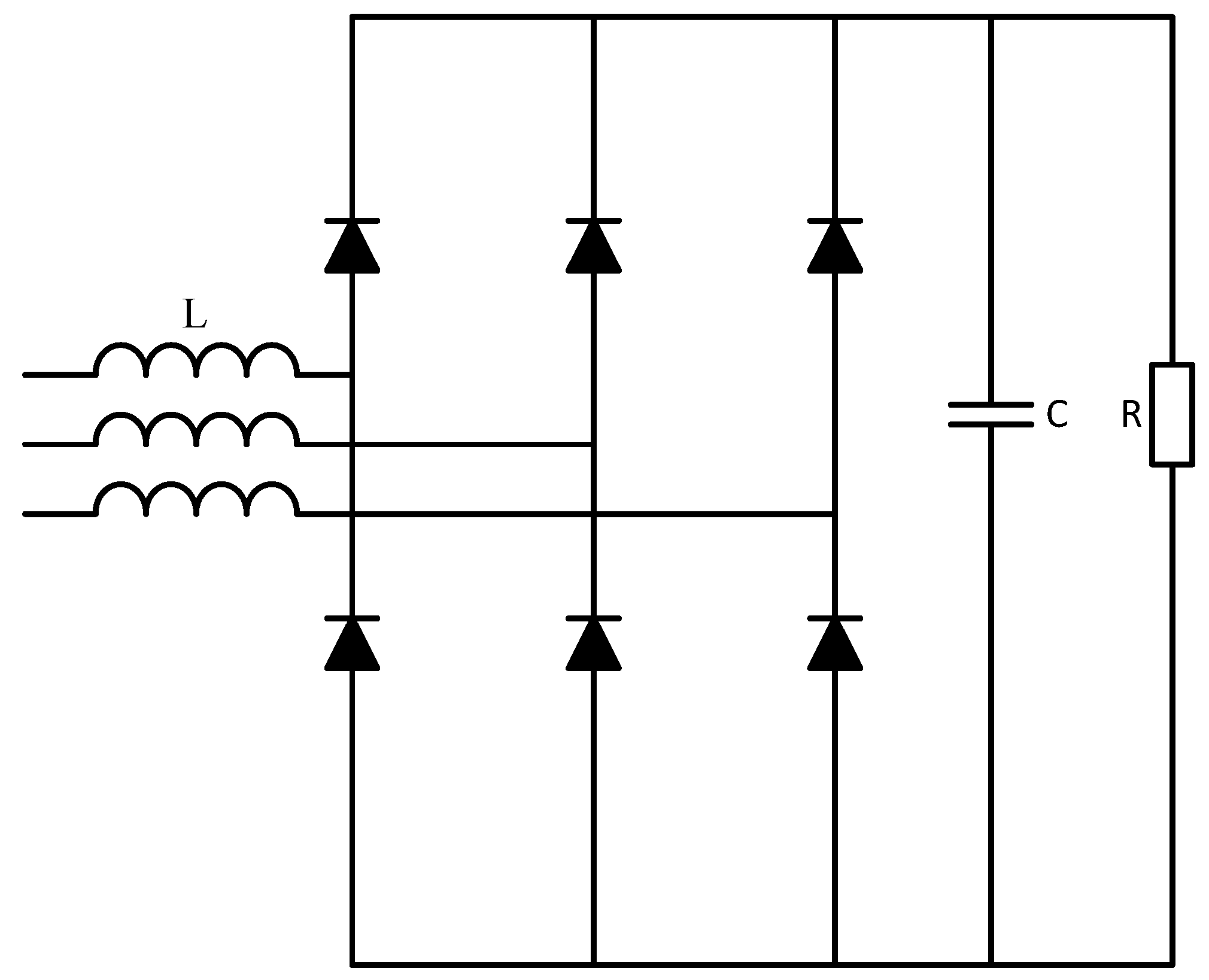
2.1. System Model
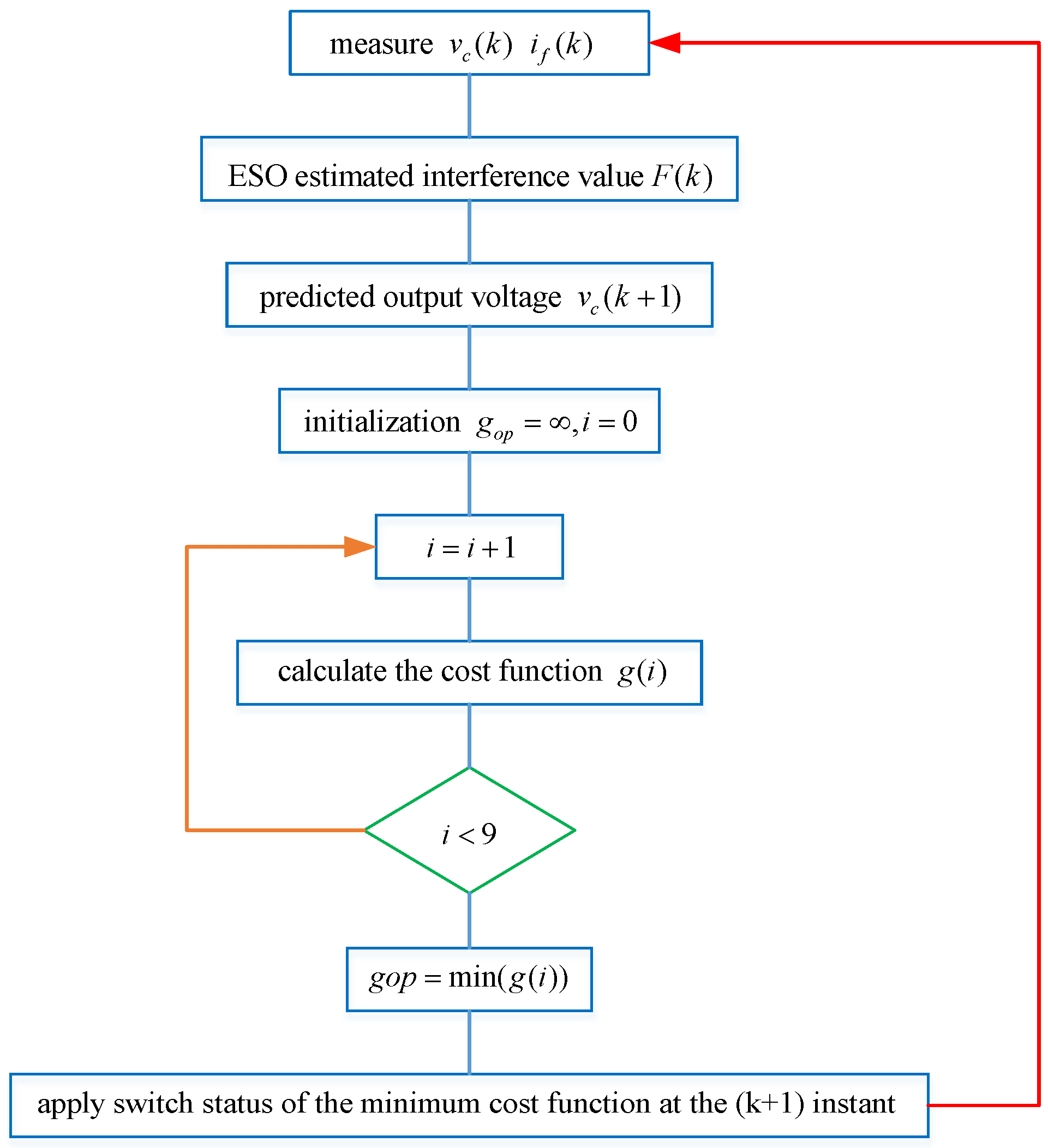
2.2. Cost Function
3. Model Predictive Voltage Control Based on ESO
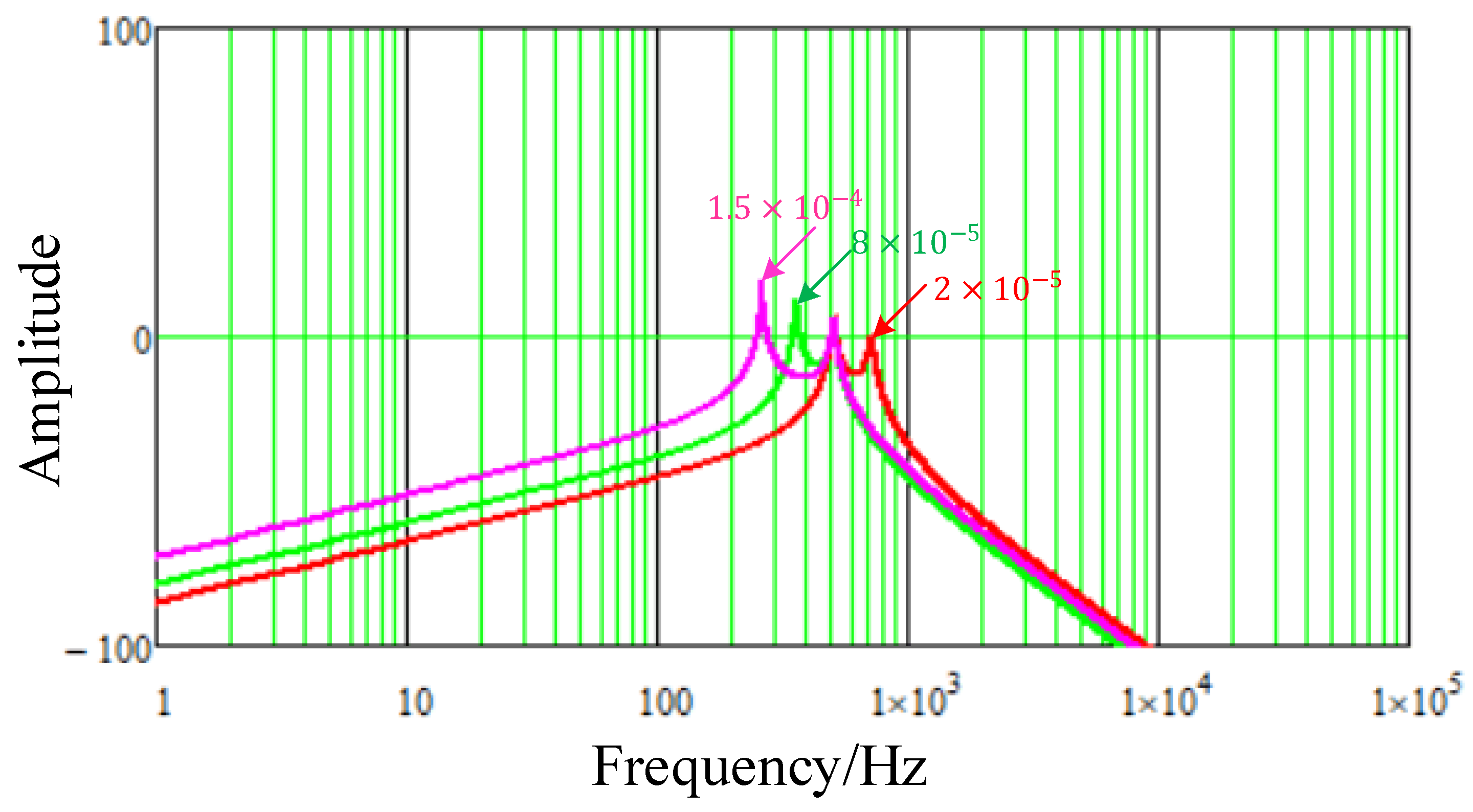
3.1. Impact Analysis of Parameter Mismatch on Output Voltage
3.2. Mathematical Model of Parameter Mismatch
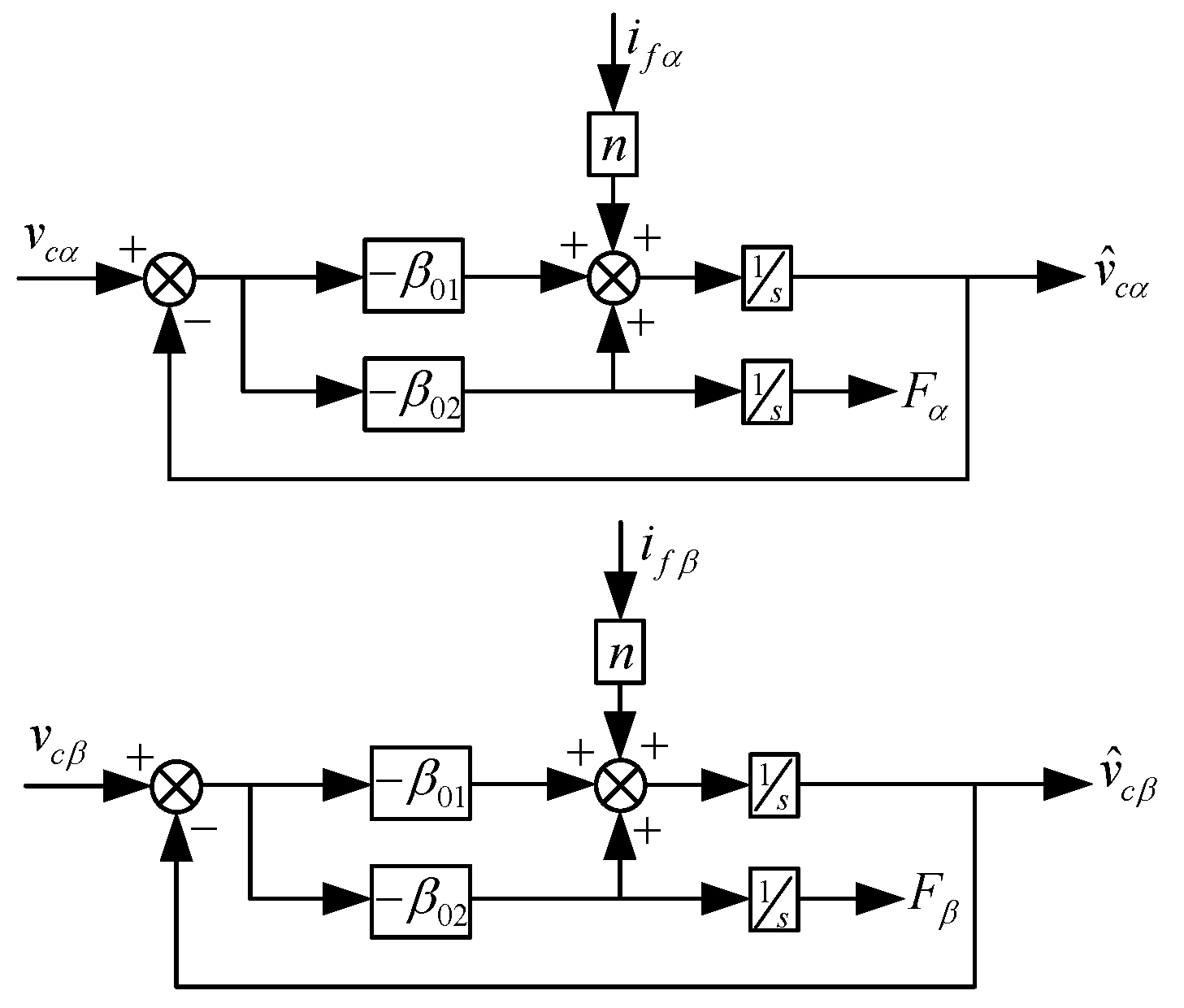
3.3. Design of Extended-State Observer
3.4. Predictive Control Model of ESO
4. Simulation and Experimental Results
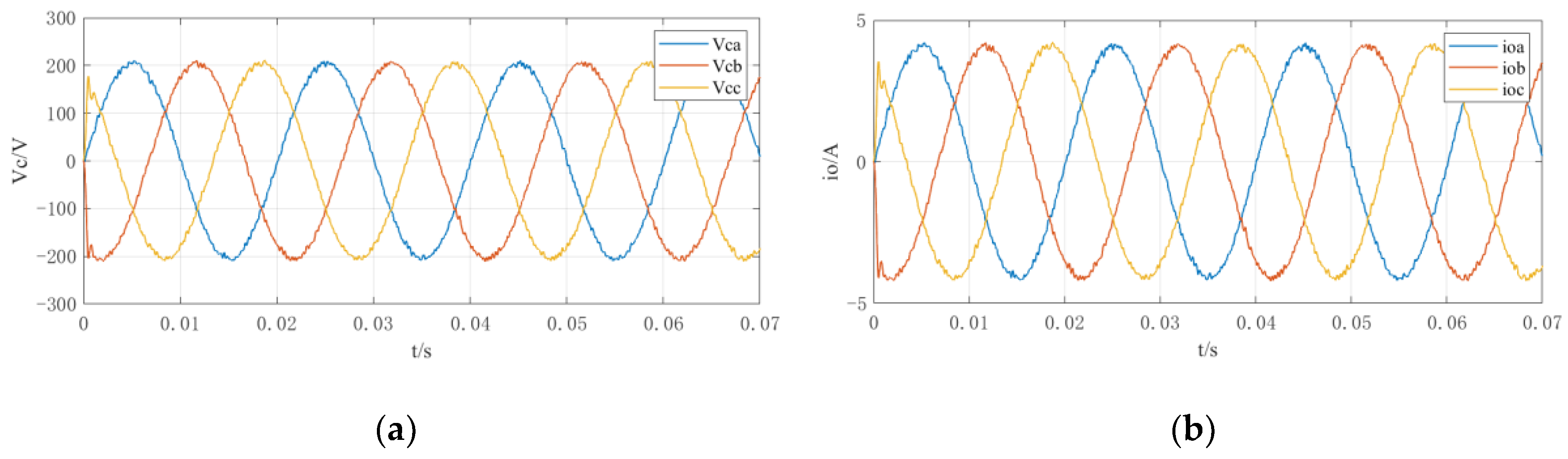
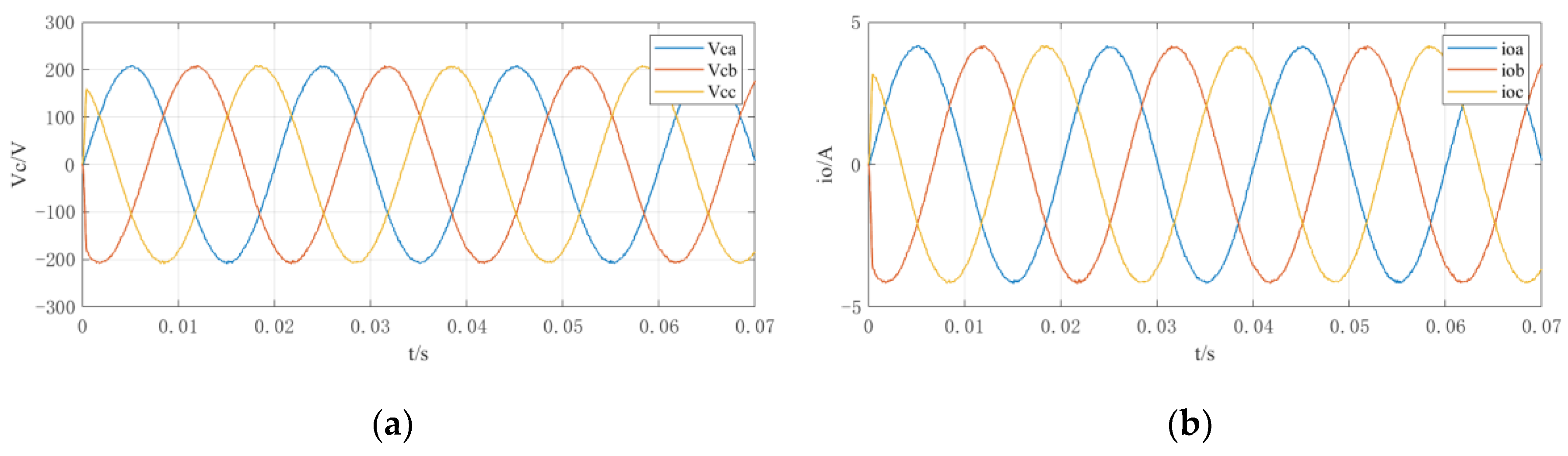
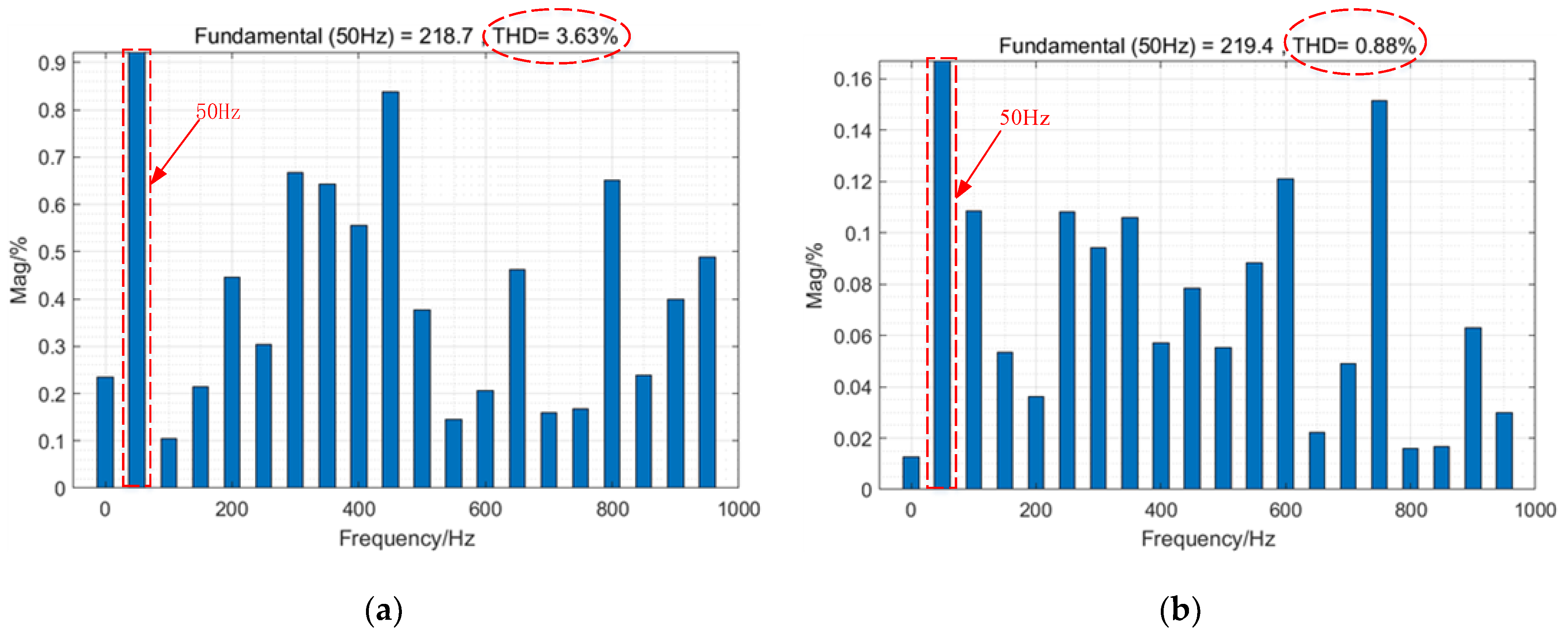
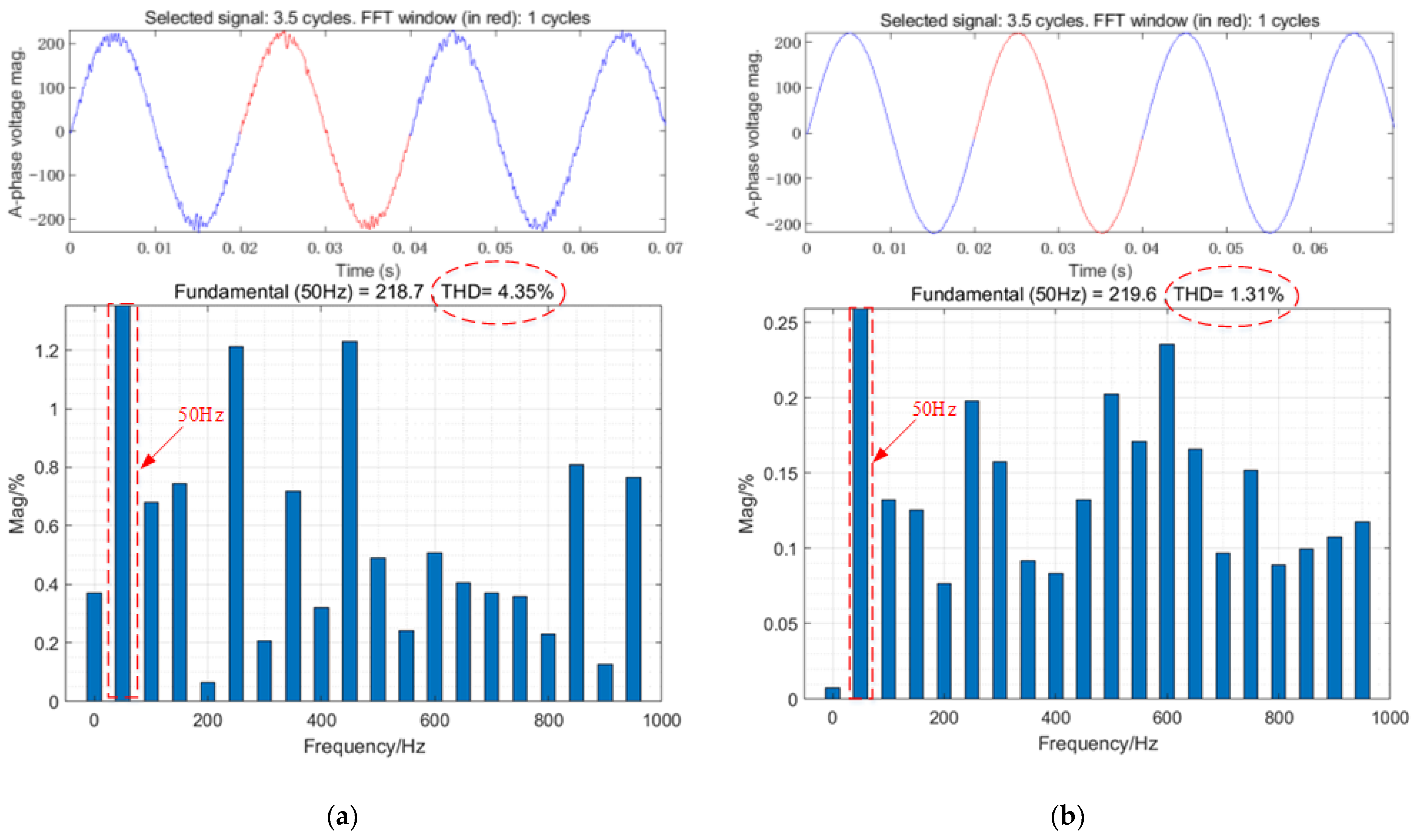
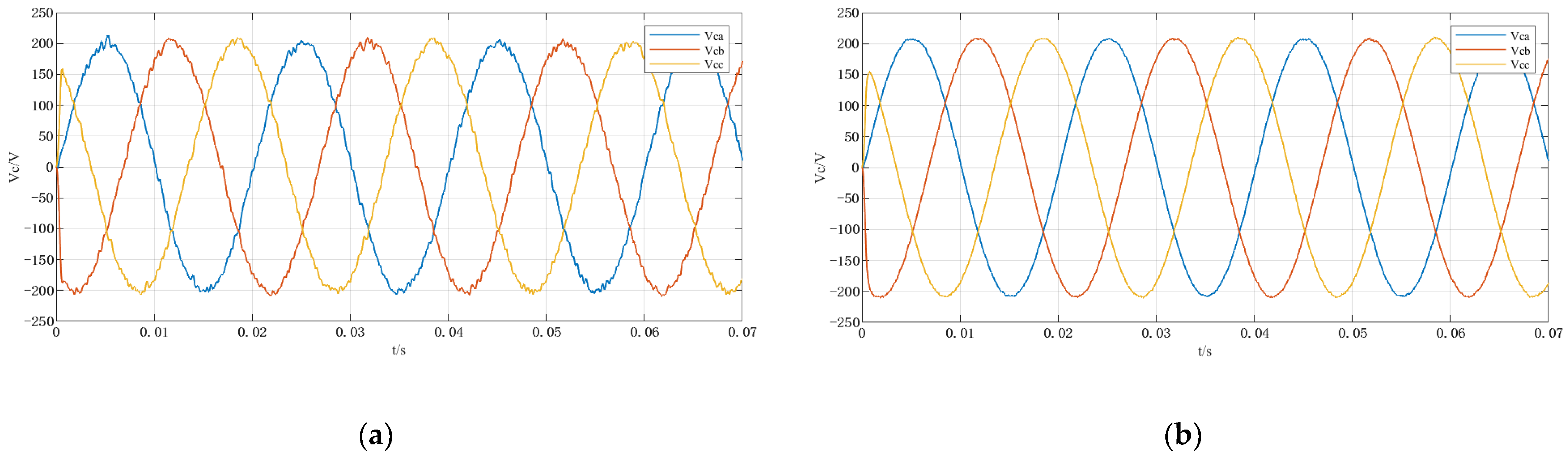
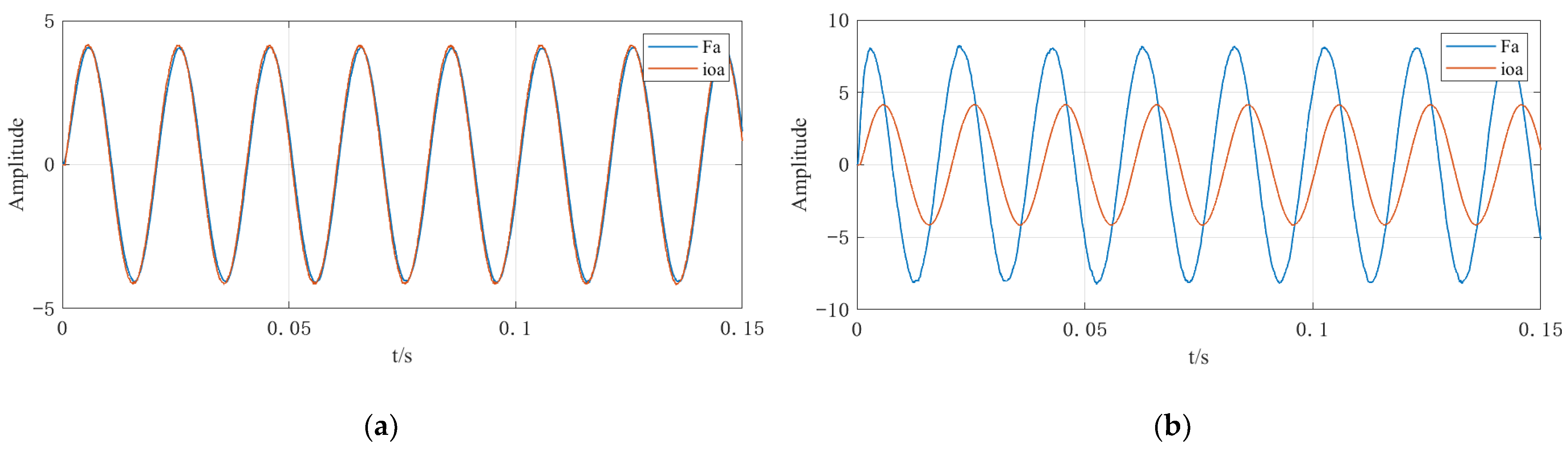
4.1. Simulation Results
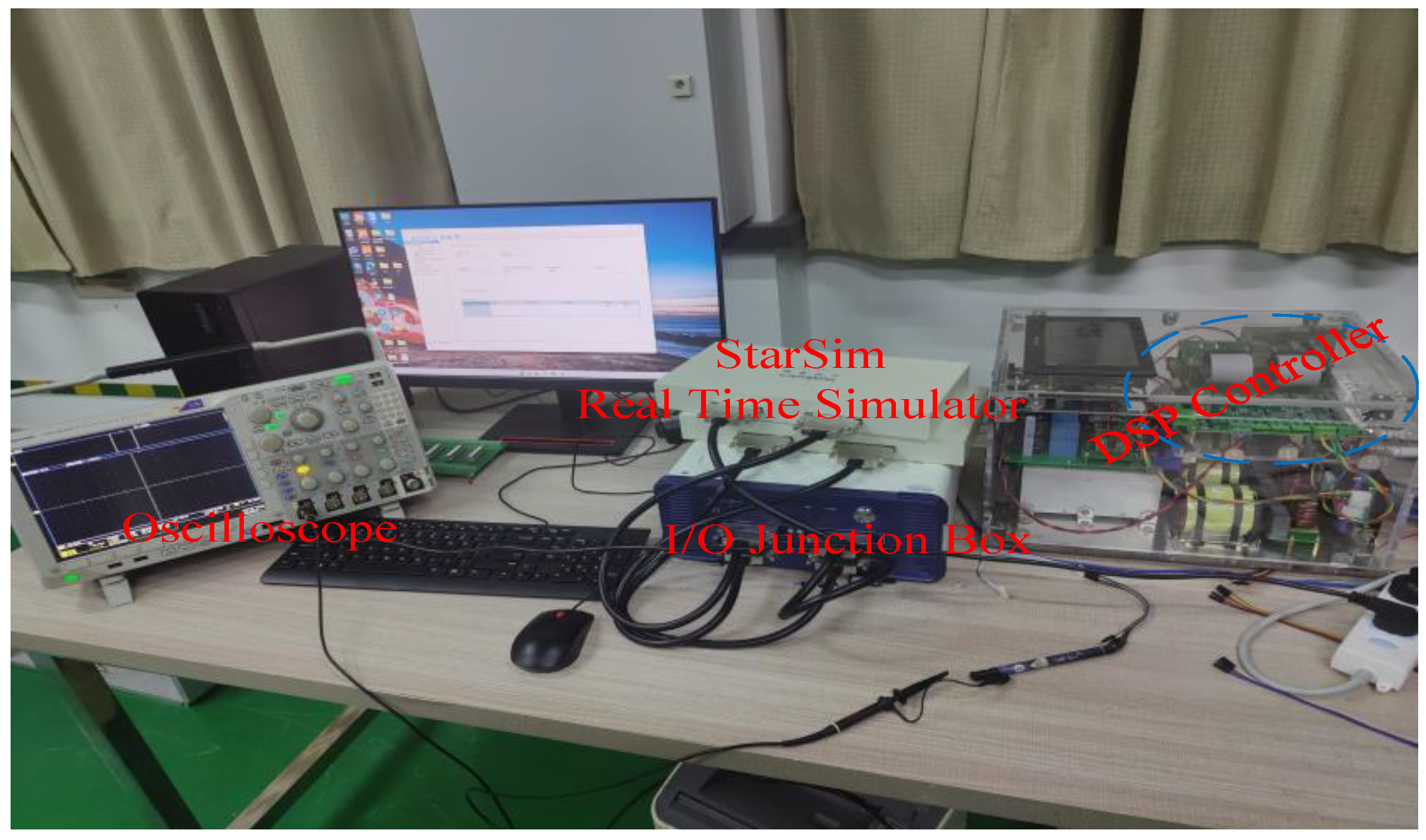
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shahzad, D.; Pervaiz, S.; Zaffar, N.A.; Afridi, K.K. GaN-based high-power-density AC–DC–AC converter for single-phase transformerless online uninterruptible power supply. IEEE Trans. Power Electron. 2021, 36, 13968–13984. [Google Scholar] [CrossRef]
- Han, Y.; He, G.; Fan, X.; Zhao, Q.; Shen, H. Design and analysis of improved ADRC controller for multiple grid-connected photovoltaic inverters. Mod. Phys. Lett. B 2018, 32, 34–36. [Google Scholar] [CrossRef]
- Prabhakaran, P.; Krishna, S.M.; Febin, D.J.L.; Perumal, T. A novel PR controller with improved performance for single-phase UPS inverter. In Proceedings of the 2021 4th Biennial International Conference on Nascent Technologies in Engineering, NaviMumbai, India, 15–16 January 2021. [Google Scholar]
- Li, J.; Sun, Y.; Li, X.; Xie, X.; Lin, J.; Su, M. Observer-based adaptive control for single-phase UPS inverter under nonlinear load. IEEE Trans. Trans. Electr. 2022, 8, 2785–2796. [Google Scholar] [CrossRef]
- Caseiro, L.M.A.; Mendes, A.M.S.; Cruz, S.M.A. Cooperative and dynamically weighted model predictive control of a 3-Level uninterruptible power supply with improved performance and dynamic response. IEEE Trans. Ind. Electron. 2020, 67, 4934–4945. [Google Scholar] [CrossRef]
- Na, Z.; Kaitao, Z.; Hui, Z.; Xi, X. Model predictive control of energy storage converter with feedback correction. In Proceedings of the 2017 Chinese Automation Congress, Jinan, China, 20–22 October 2017. [Google Scholar]
- Qin, G.; Chen, Q.; Zhang, L. Finite control set model predictive control based on three-phase four-leg grid-connected inverters. In Proceedings of the 2020 35th Youth Academic Annual Conference of Chinese Association of Automation, Zhanjiang, China, 16–18 October 2020. [Google Scholar]
- Chen, Z.; Qiu, J. Adjacent-vector-based model predictive control for permanent magnet synchronous motors with full model estimation. IEEE J. Emerg. Sel. Top. Power Electron. 2022. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Predictive control of a three-phase UPS inverter using two steps prediction horizon. In Proceedings of the IEEE International Conference on Industrial Technology, Via del Mar, Chile, 14–17 March 2010. [Google Scholar]
- Chan, R.; Kim, K.H.; Park, J.Y.; Kwak, S.S. Simplified model predictive control with preselection technique for reduction of calculation burden in 3-Level 4-leg NPC inverter. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition, New Orleans, LA, USA, 15–19 March 2020. [Google Scholar]
- Zhang, H.; Ma, Z.; Li, Z.; Zhang, X.; Liao, Z.; Lin, G. Multivariable sequential model predictive control of LCL-type grid connected inverter. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics, Jinan, China, 20–22 November 2021. [Google Scholar]
- Chun, H.; Jianhui, H.; Yong, L. Robust predictive current control for PMSM drives with parameter mismatch. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics, Jinan, China, 20–22 November 2021. [Google Scholar]
- Yuan, X.; Xie, S.; Chen, J.; Zhang, S.; Zhang, C.; Lee, C.H.T. An enhanced deadbeat predictive current control of SPMSM with linear disturbance observer. IEEE J. Emerg. Sel. Top. Power Electron. 2022. [Google Scholar] [CrossRef]
- He, C.; Hu, J.; Ran, X. Finite control set model predictive current control for PMSM based on extended state observer. In Proceedings of the 14th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 19–21 June 2019. [Google Scholar]
- Danayiyen, Y.; Lee, K.; Choi, M.; Lee, Y.I. Model Predictive Control of Uninterruptible Power Supply with Robust Disturbance Observer. Energies 2019, 12, 2871. [Google Scholar] [CrossRef] [Green Version]
- Le, V.-T.; Lee, H.-H. Robust finite-control-set model predictive control for voltage source inverters against LC-filter parameter mismatch and variation. J. Power Electron. 2022, 22, 406–419. [Google Scholar] [CrossRef]
- Mohamed, I.; Zaid, S.; Elyazeed, M.A.; Elsayed, H. Improved model predictive control for three-phase inverter with output LC filter. Int. J. Model. Identif. Control 2015, 23, 371. [Google Scholar] [CrossRef]
- Mohamed, I.S.; Zaid, S.A.; Abu-Elyazeed, M.F.; Elsayed, H.M. Classical methods and model predictive control of three-phase inverter with output LC filter for UPS applications. In Proceedings of the International Conference on Control, Decision and Information Technologies, Hammamet, Tunisia, 23 December 2013. [Google Scholar]
- Xu, Q.; Sun, M.; Chen, Z.; Zhang, D. Analysis and design of the extended state observer using internal mode control. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013. [Google Scholar]
- Zhang, Y.; Jin, J.; Huang, L. Model-free predictive current control of PMSM drives based on extended state observer using ultralocal model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Mohamed, I.S.; Rovetta, S.; Do, T.D.; Dragicević, T.; Diab, A.A.Z. A neural-network-based model predictive control of three-phase inverter with an output LC filter. IEEE Access 2019, 7, 124737–124749. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 520 V | |
| Filter inductance L | 2.4 mH |
| Filter capacitor C | 40 μF |
| 33 μs |
| Pure Resistor Load/W | Traditional MPC | MPC Based on ESO |
|---|---|---|
| THD/% | THD/% | |
| 100 | 3.67 | 0.94 |
| 3000 | 3.63 | 0.88 |
| 30,000 | 2.54 | 0.91 |
| Resistance/Ω | Capacitance/μF | Traditional MPC | MPC Based on ESO |
|---|---|---|---|
| THD/% | THD/% | ||
| 400 | 100 | 3.40 | 1.36 |
| 400 | 2000 | 3.06 | 1.45 |
| 300 | 500 | 2.81 | 1.60 |
| 800 | 500 | 3.14 | 1.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, G.; Zheng, S.; Dong, Y.; Li, G.; Zhang, W. Model Predictive Voltage Control of Uninterruptible Power Supply Based on Extended-State Observer. Energies 2022, 15, 5489. https://doi.org/10.3390/en15155489
He G, Zheng S, Dong Y, Li G, Zhang W. Model Predictive Voltage Control of Uninterruptible Power Supply Based on Extended-State Observer. Energies. 2022; 15(15):5489. https://doi.org/10.3390/en15155489
Chicago/Turabian StyleHe, Guofeng, Shicheng Zheng, Yanfei Dong, Guojiao Li, and Wenjie Zhang. 2022. "Model Predictive Voltage Control of Uninterruptible Power Supply Based on Extended-State Observer" Energies 15, no. 15: 5489. https://doi.org/10.3390/en15155489
APA StyleHe, G., Zheng, S., Dong, Y., Li, G., & Zhang, W. (2022). Model Predictive Voltage Control of Uninterruptible Power Supply Based on Extended-State Observer. Energies, 15(15), 5489. https://doi.org/10.3390/en15155489