
Backward Step-Up Control Strategy for Bidirectional LLC Resonant Converter



Abstract
:1. Introduction
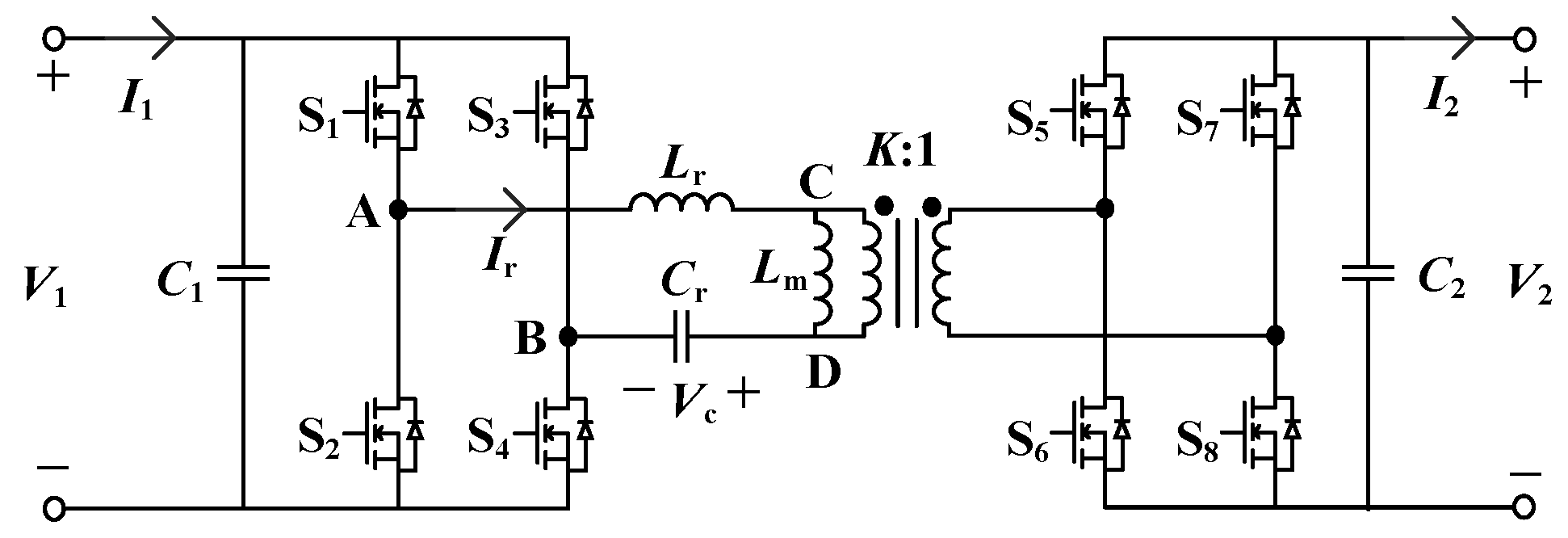
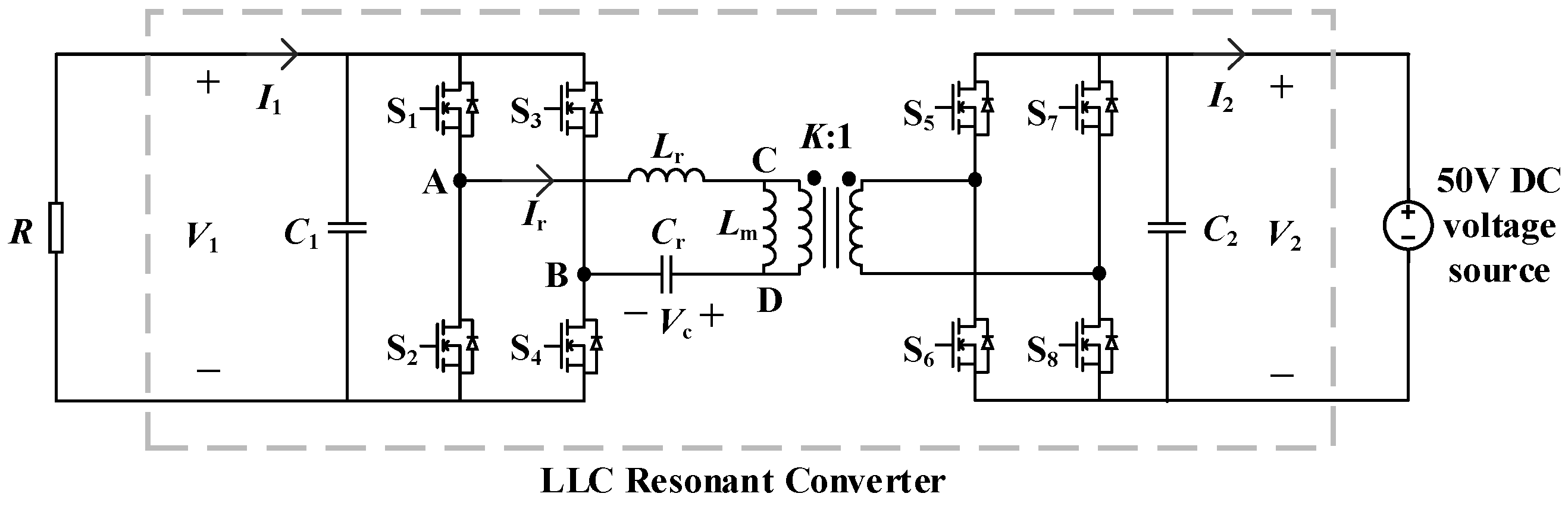
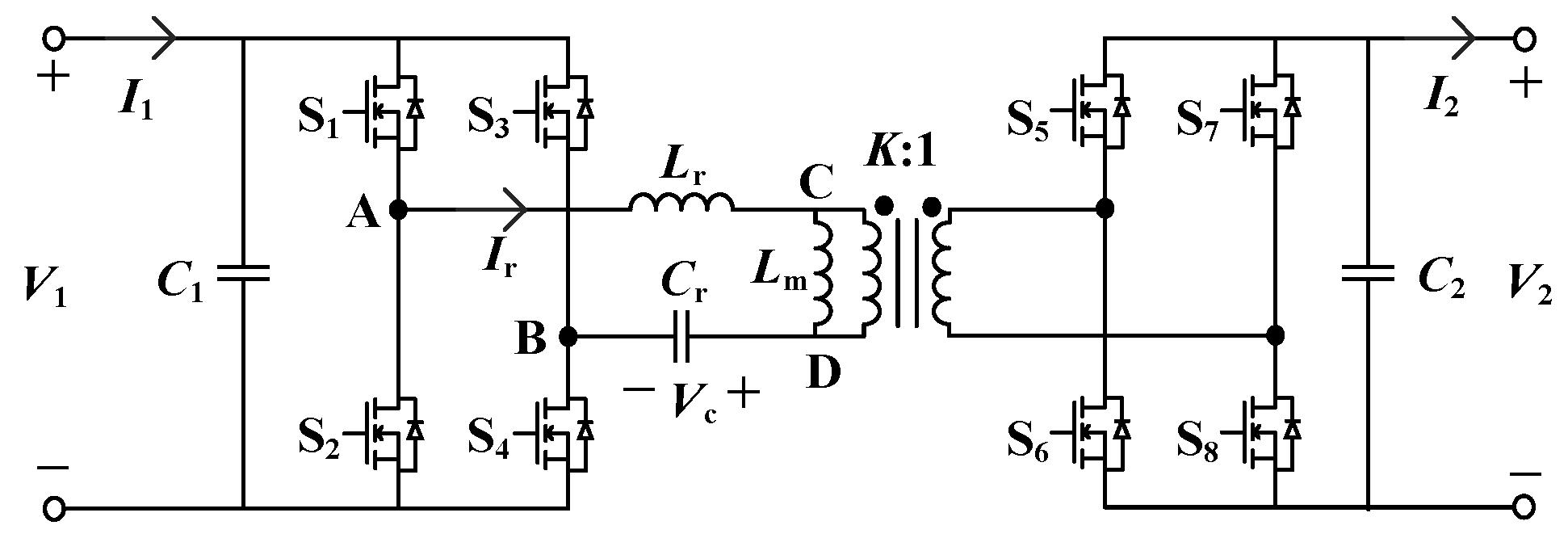
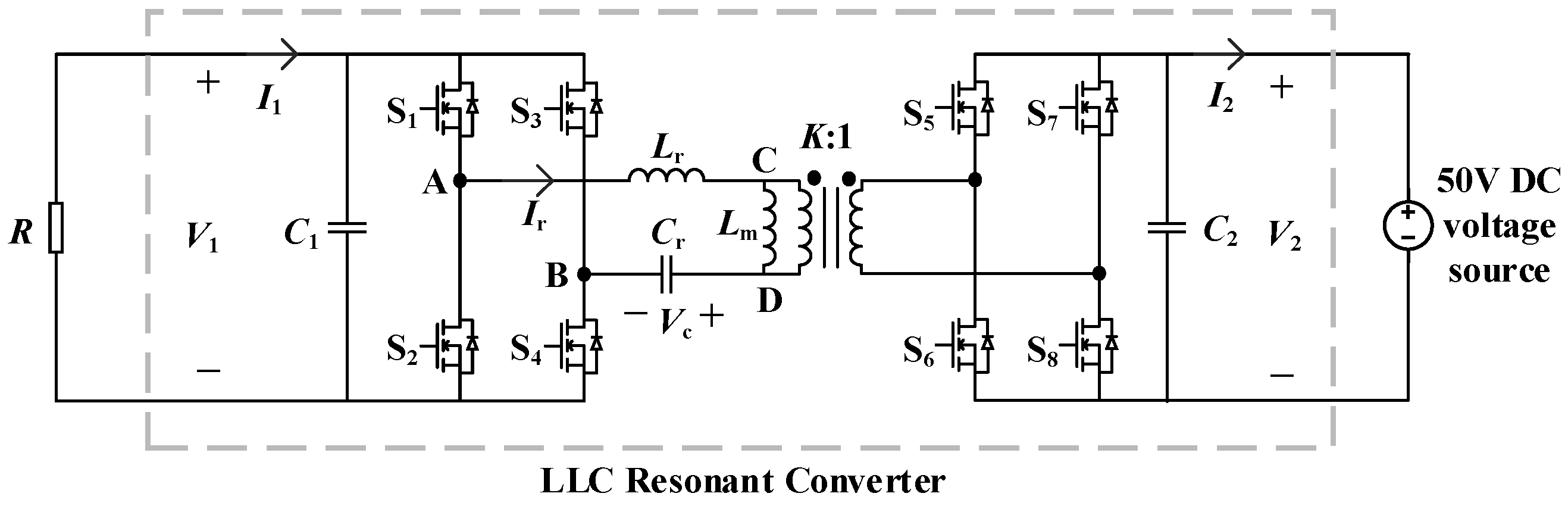
2. Analysis of Operational Characteristics of the Bidirectional LLC Converter
2.1. Bidirectional Mode Analysis
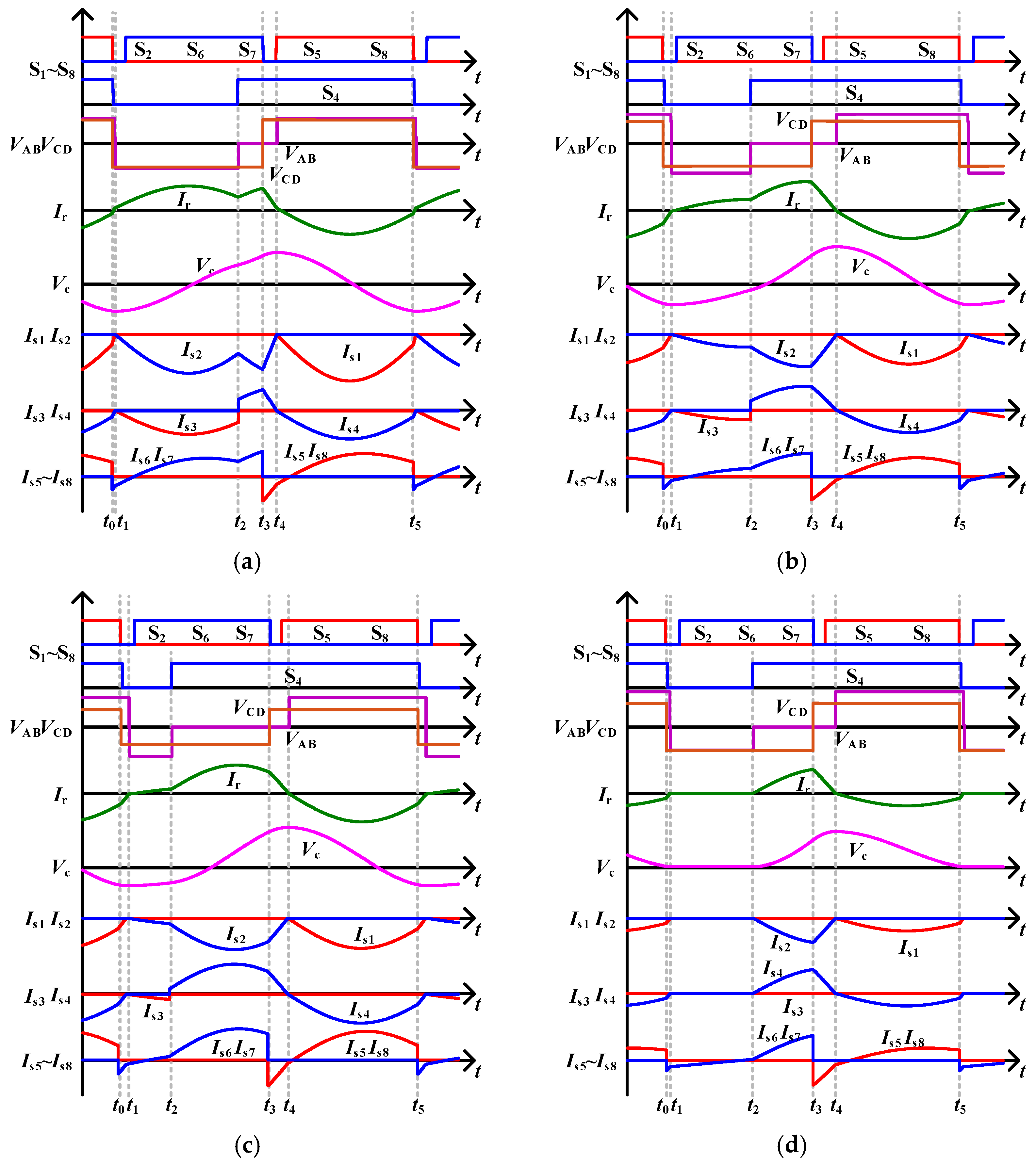
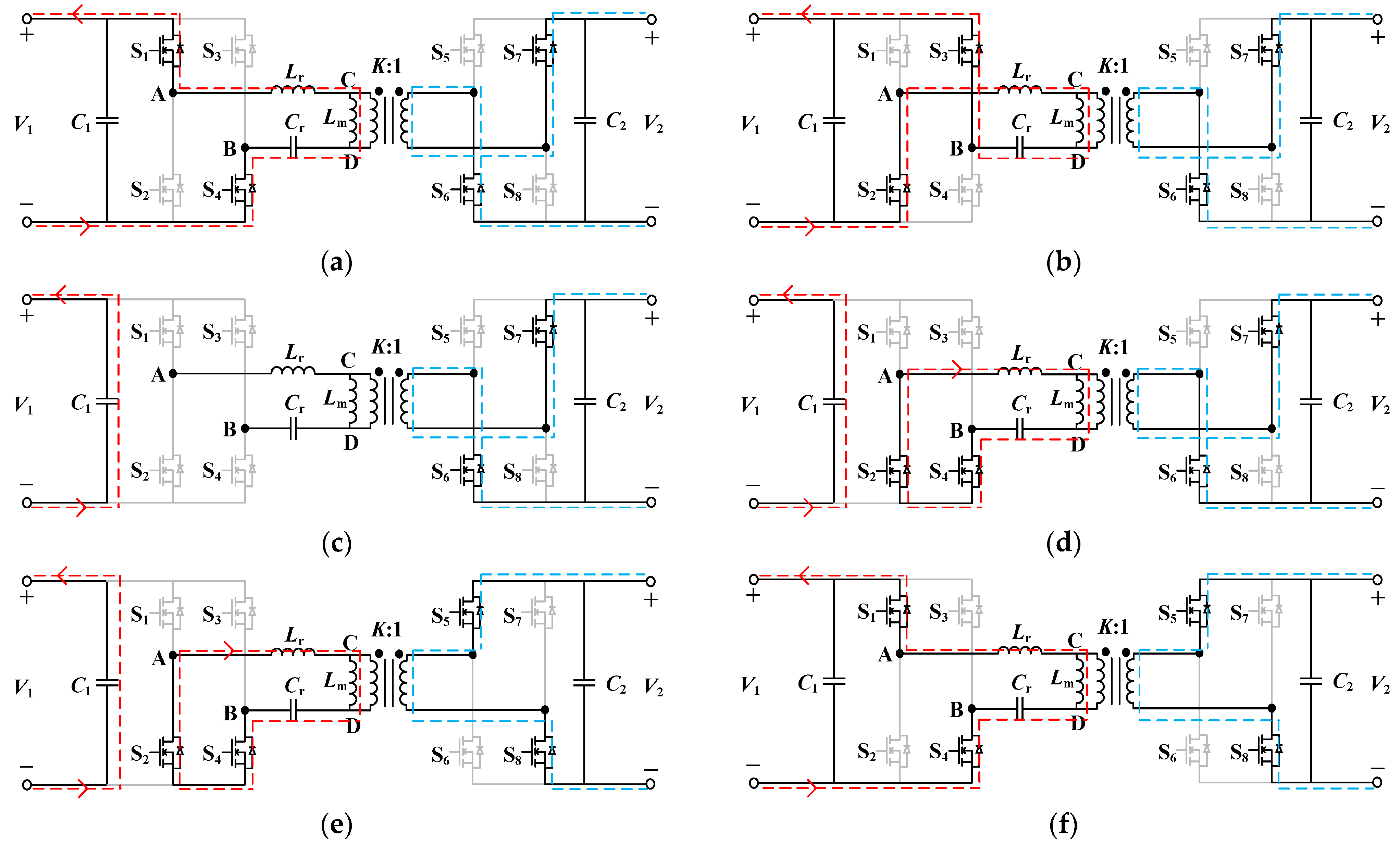
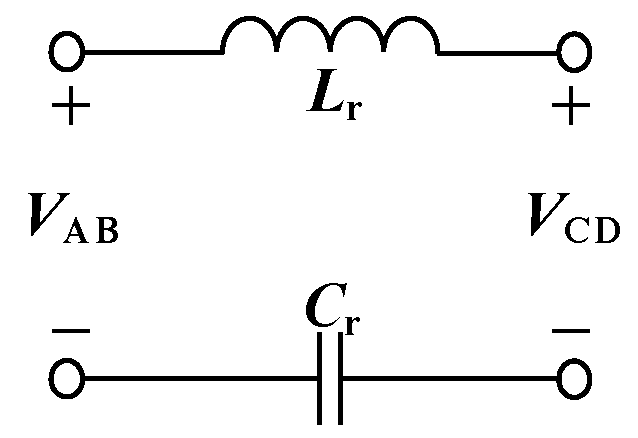
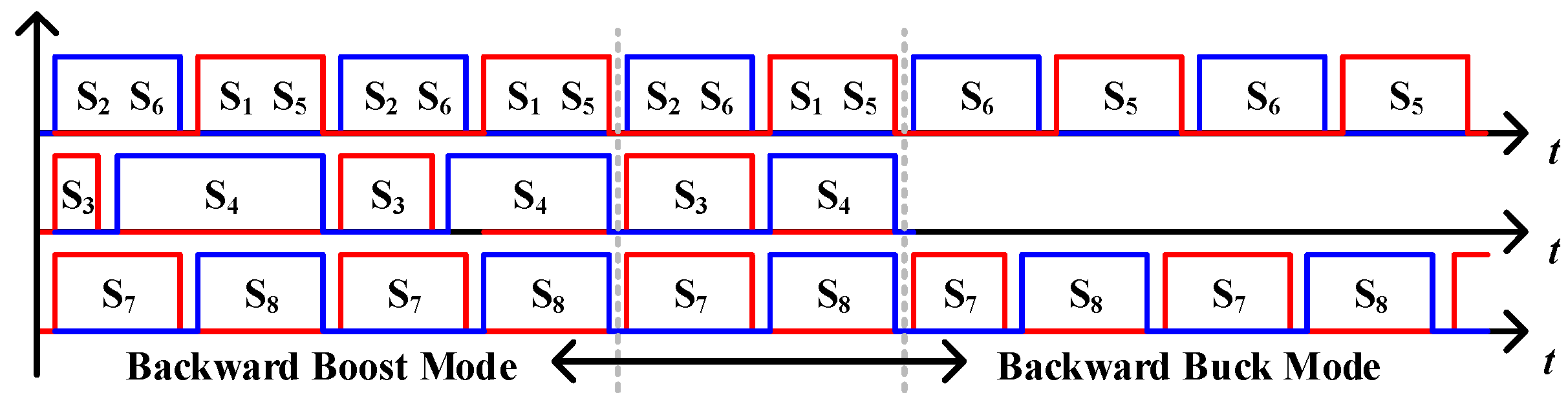
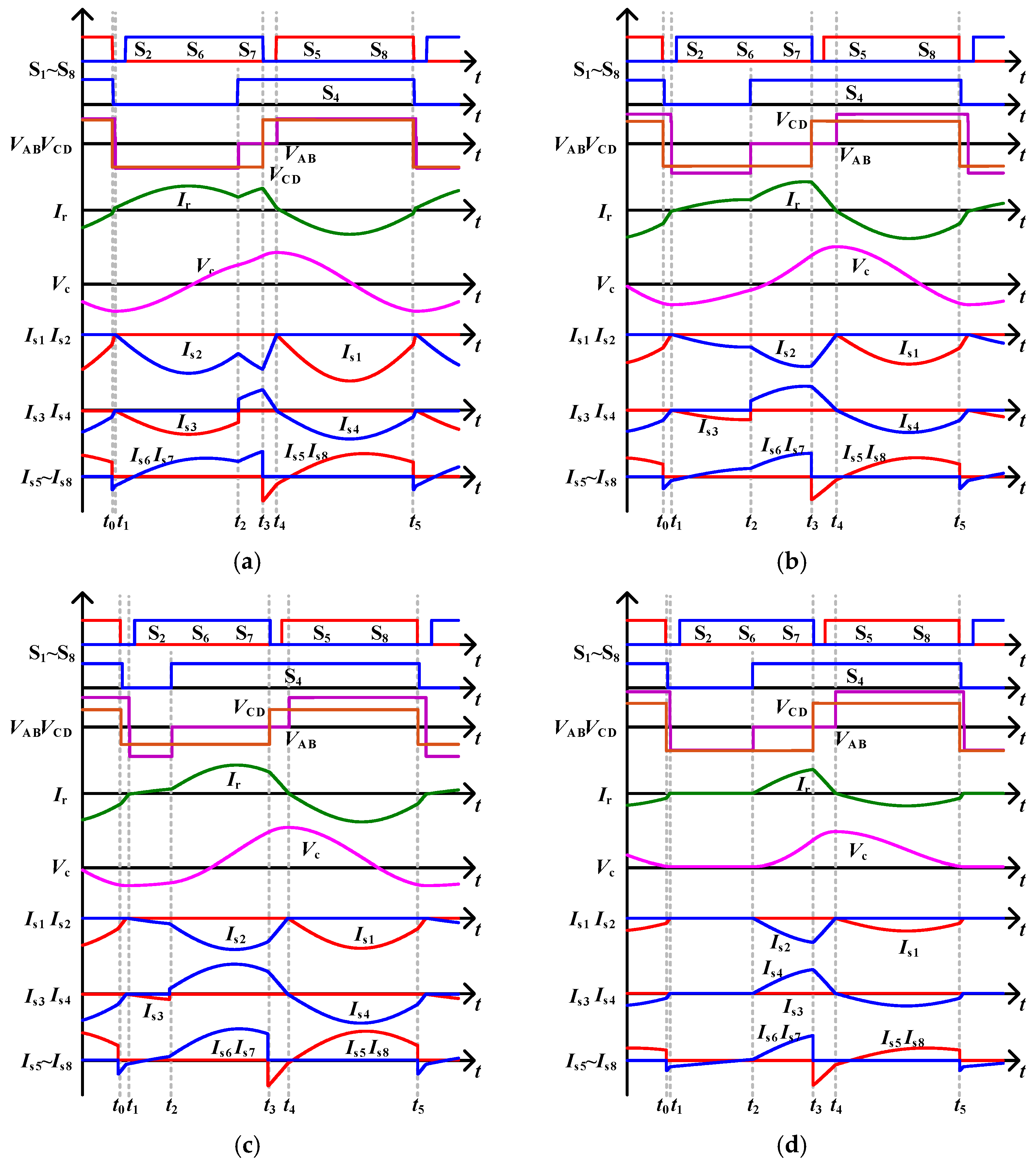
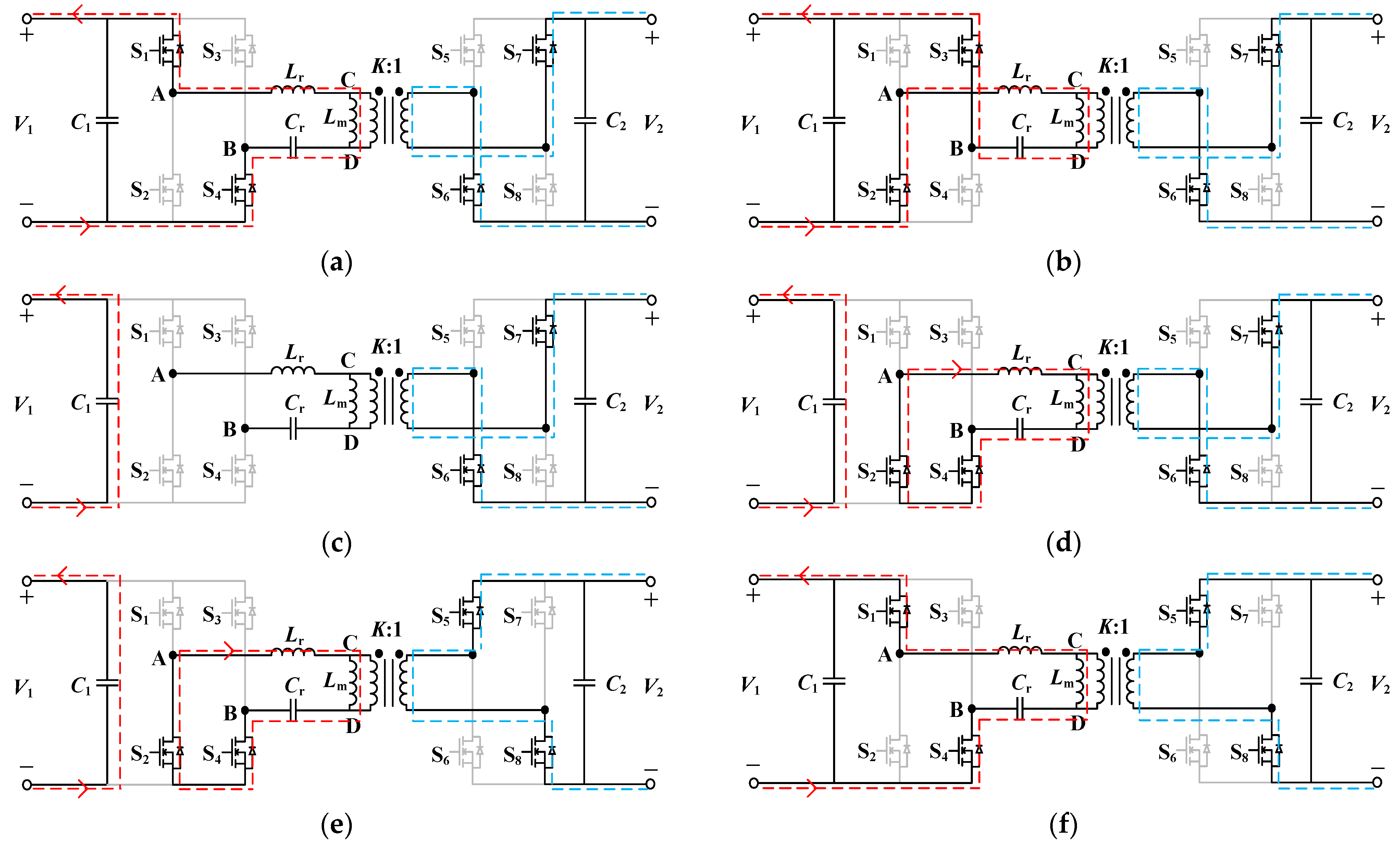
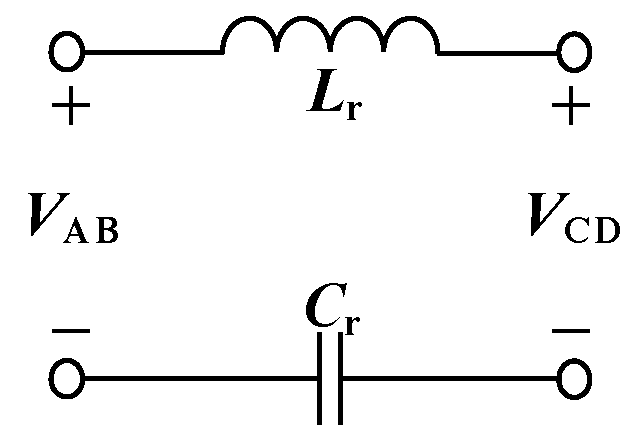
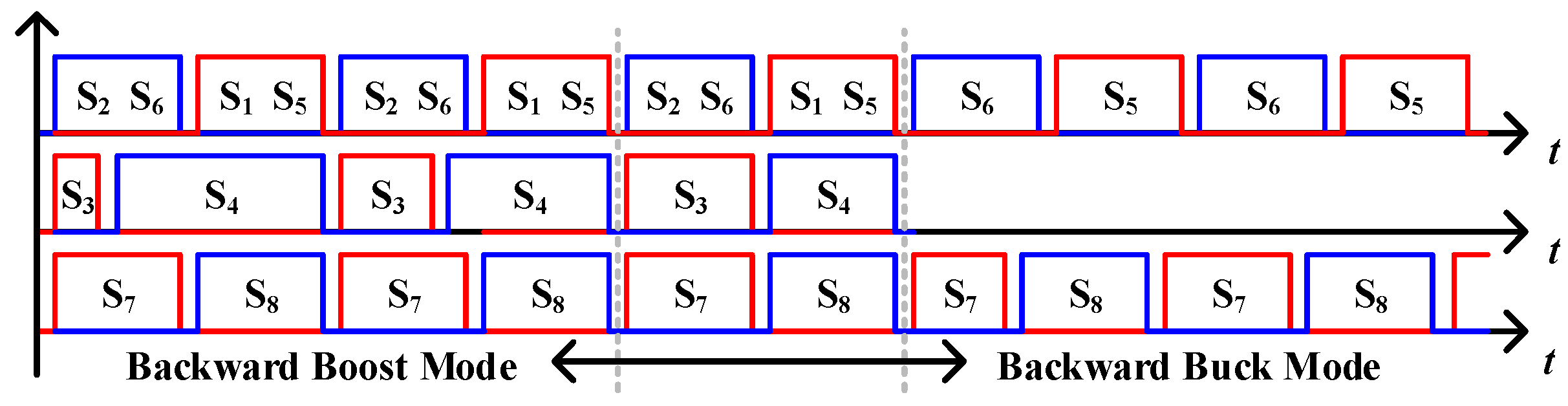
2.2. Analysis of Backward Step-Up Mode
3. Backward Step-Up Voltage Gain
3.1. Voltage Gain in CCM
3.2. Voltage Gain in DCM
3.3. Boundary of CCM and DCM
4. Backward Step-Up Control
4.1. Synchronous Rectification Control
4.2. Smooth Transition between Backward Step-Up Mode and Backward Step-Down Mode
5. Comparison with Previous Studies
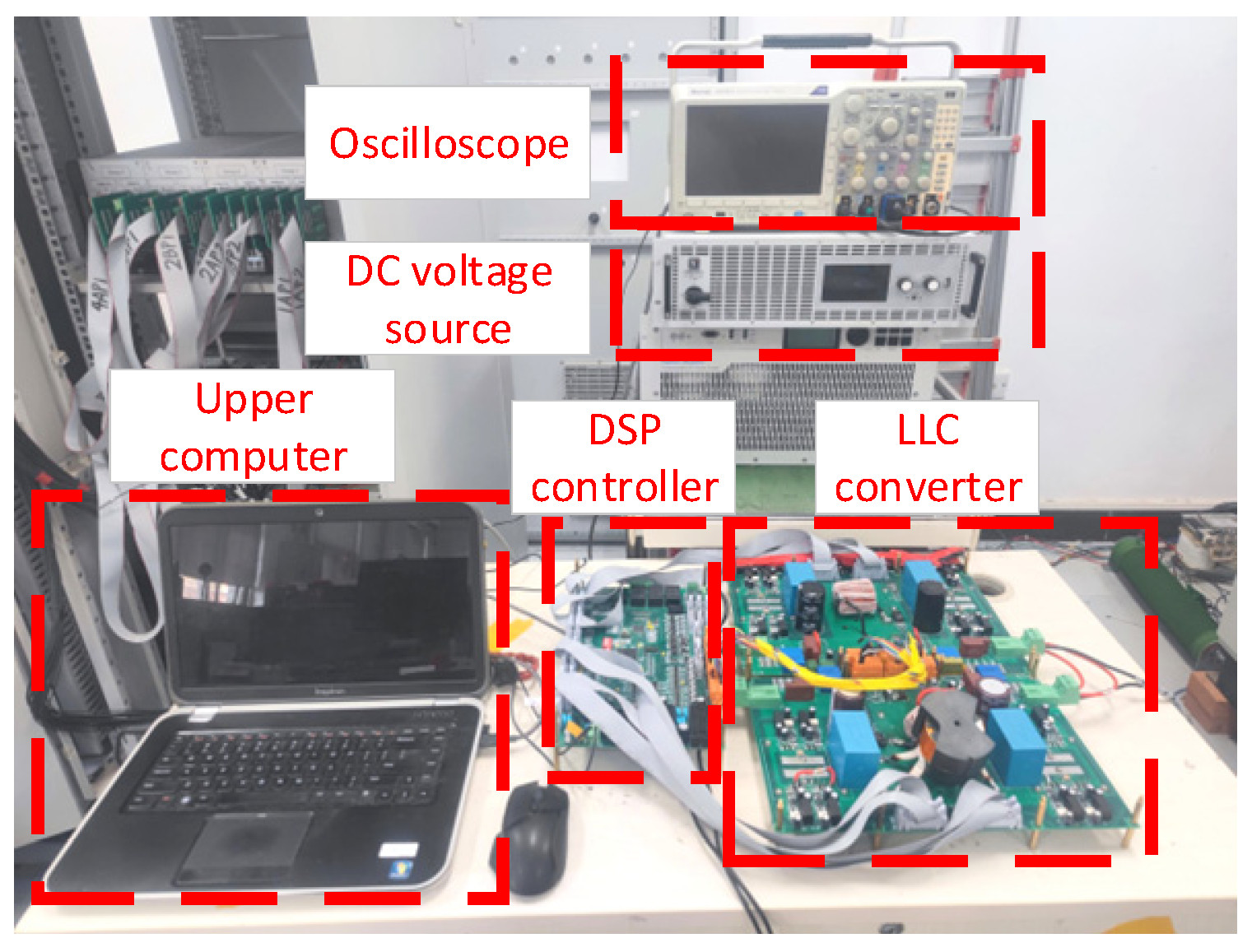
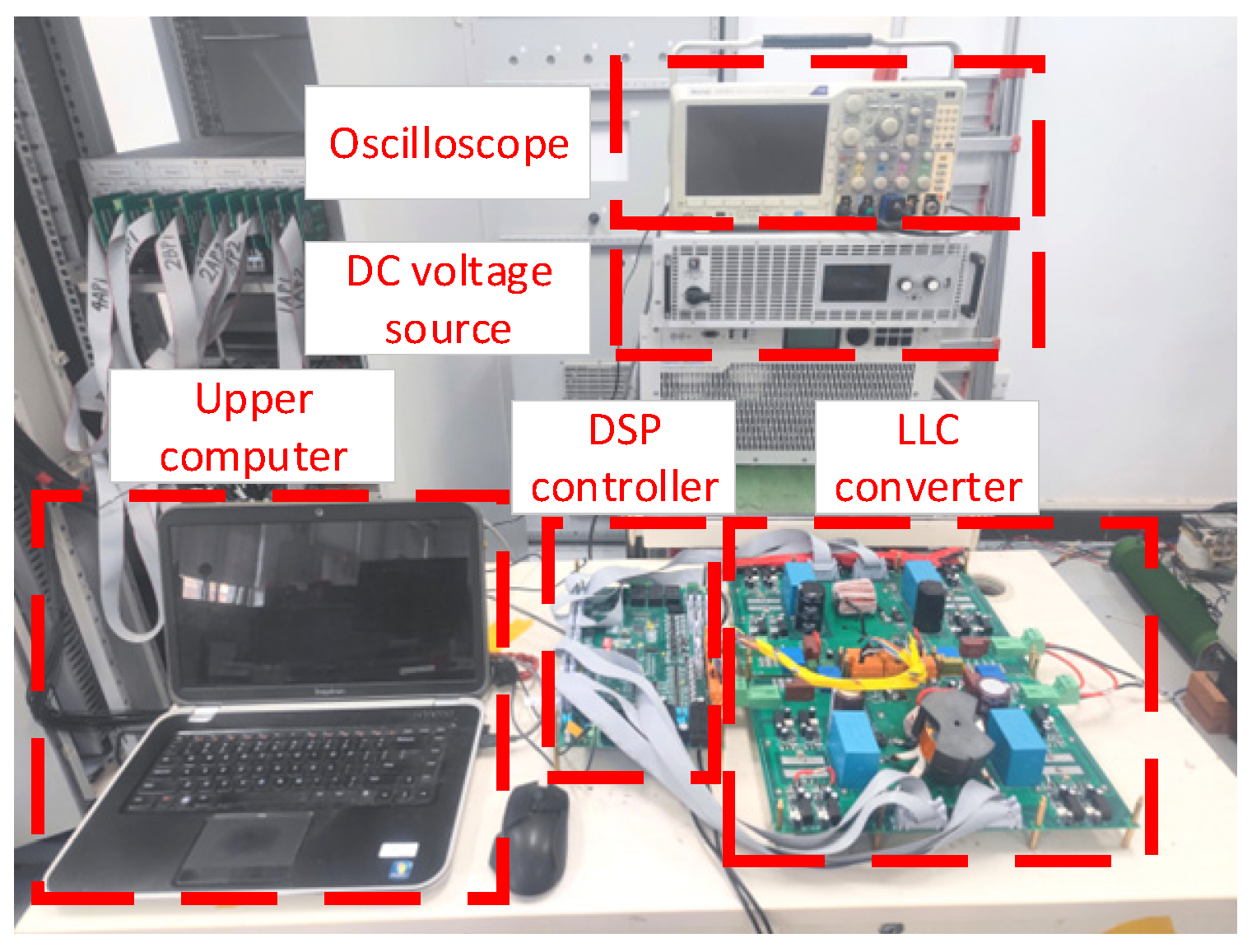
6. Experimental Verification
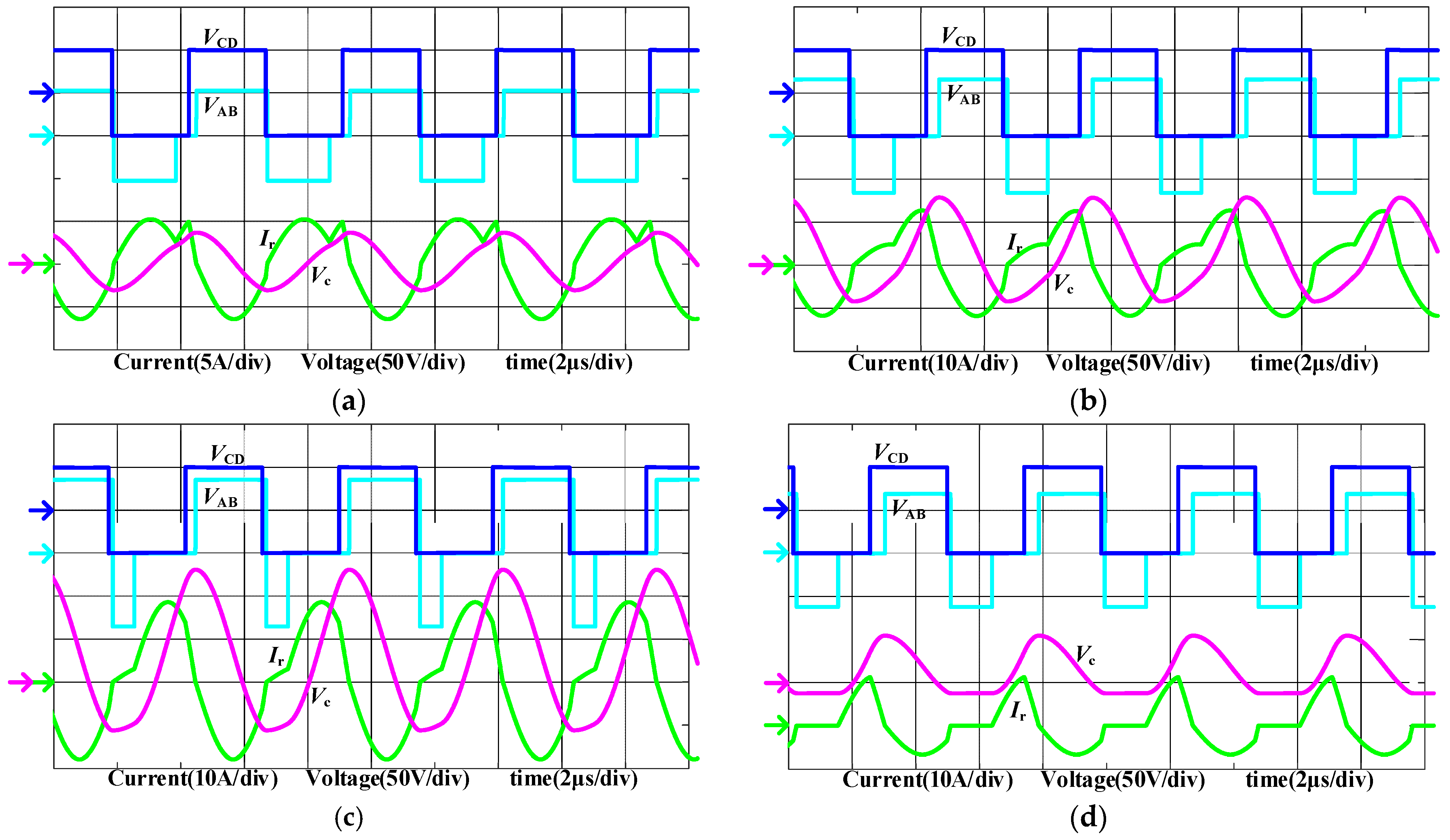
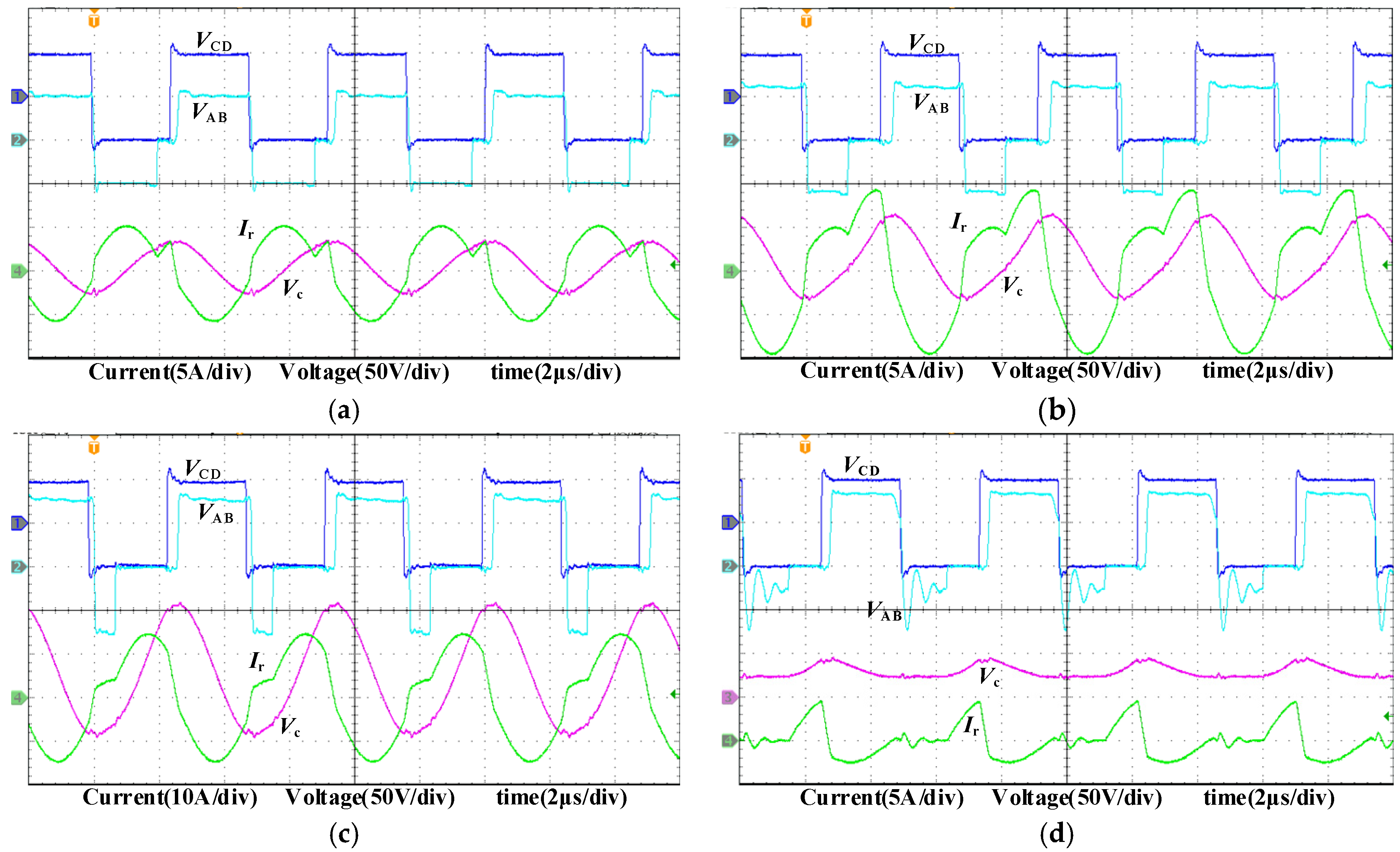
6.1. Backward Step-Up Mode Analysis Verification
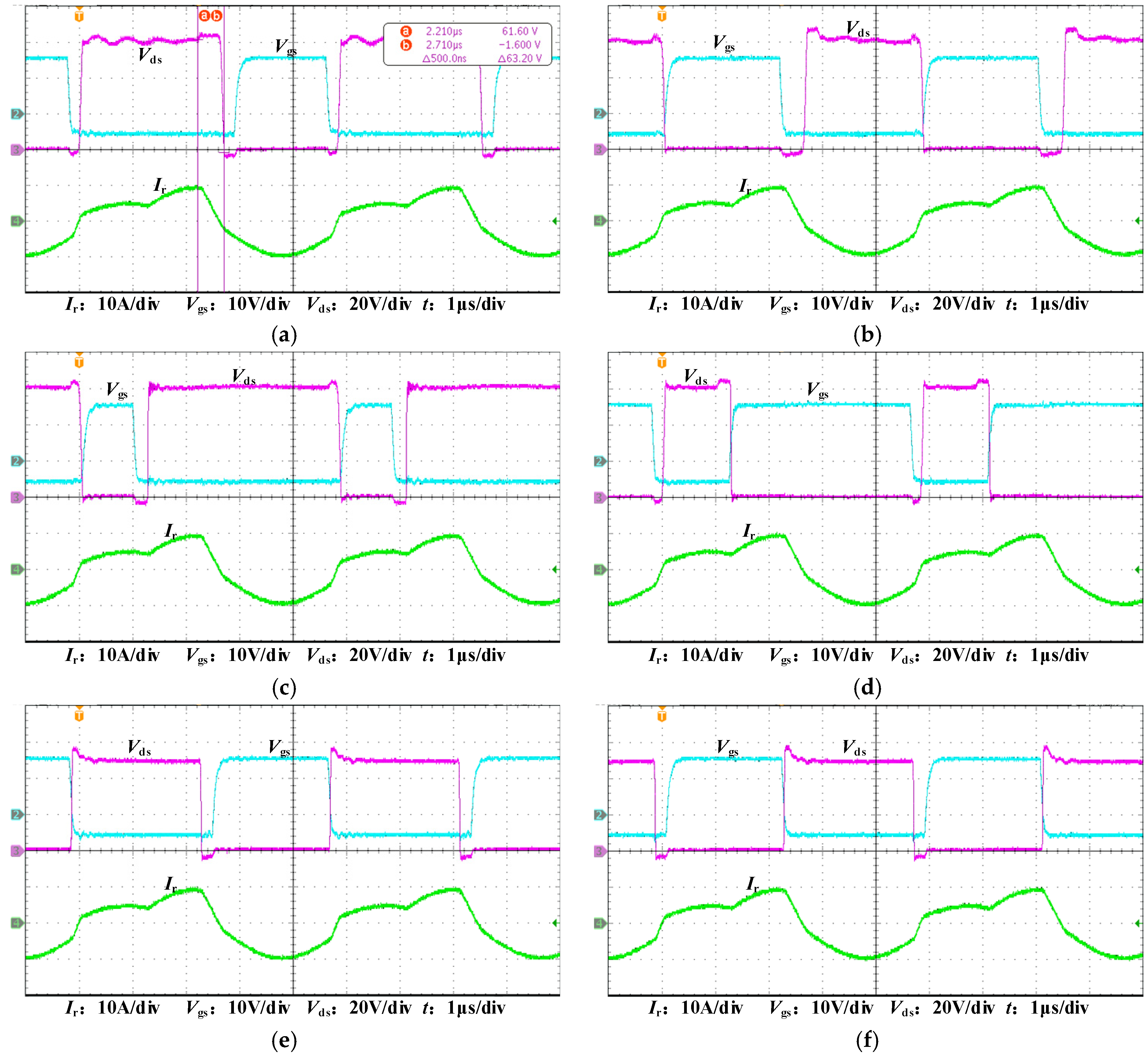
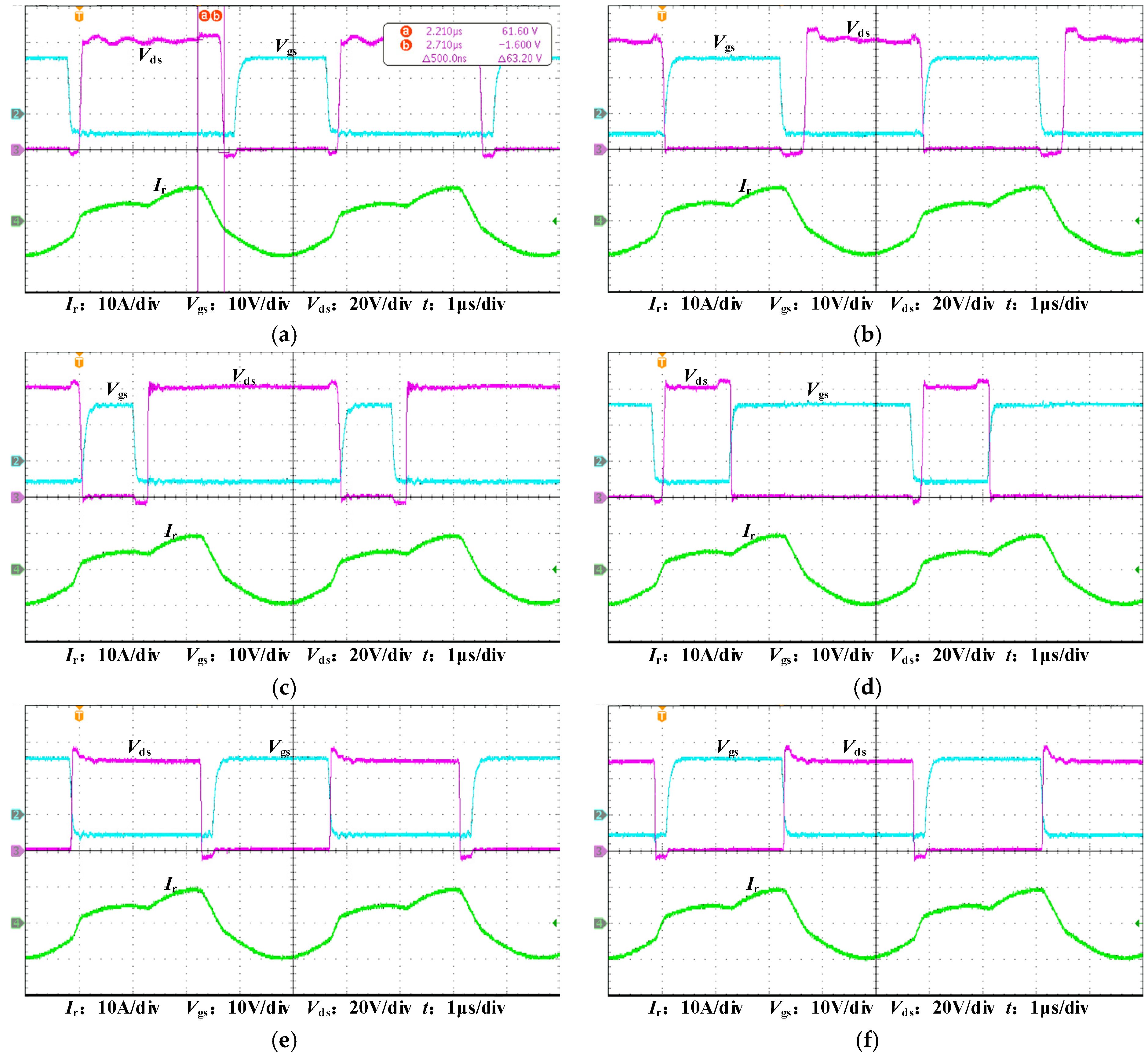
6.2. Verification of Soft Switch Characteristics and Synchronous Rectification Control
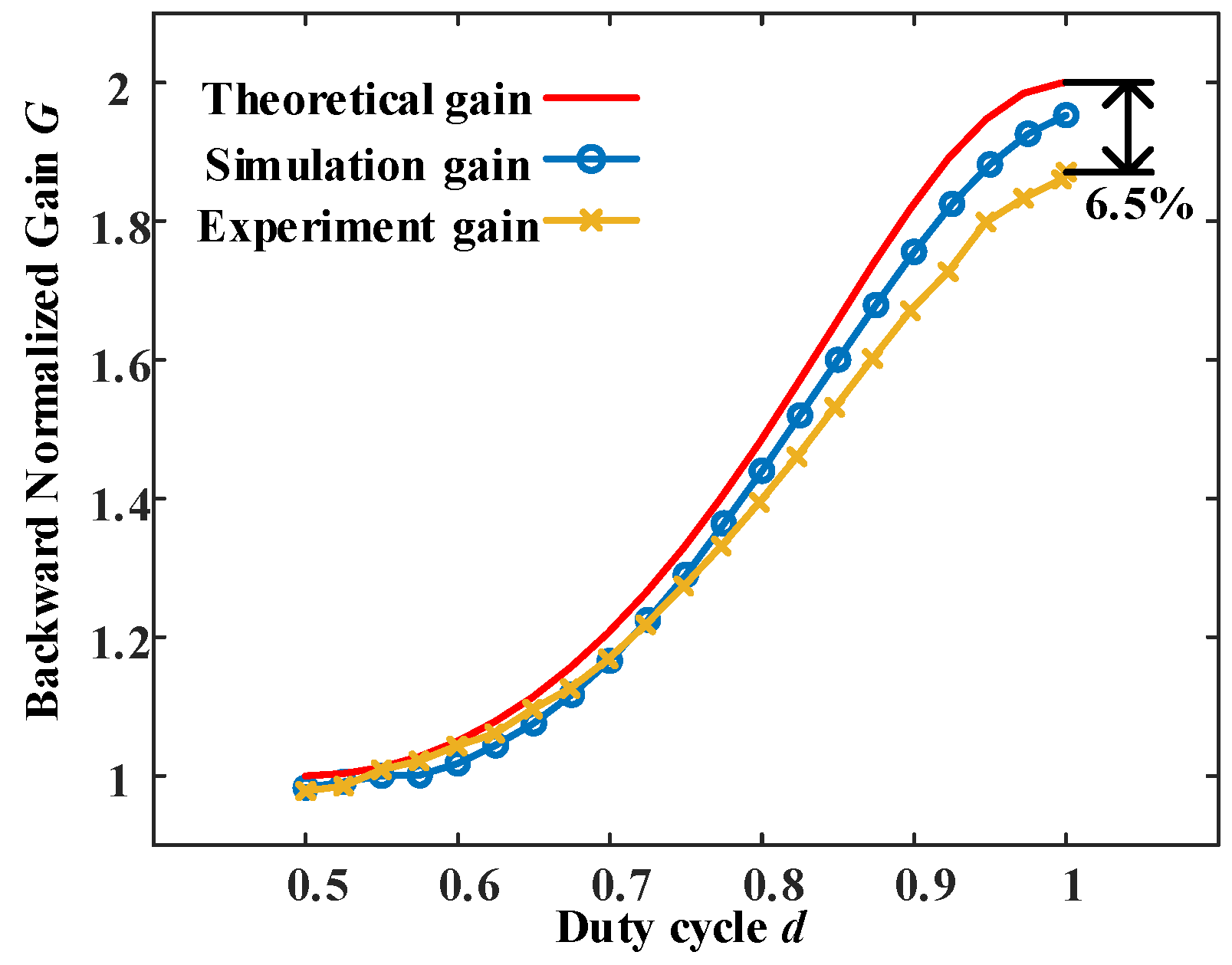
6.3. Verification of Voltage Gain
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Musavi, F.; Craciun, M.; Gautam, D.S.; Eberle, W.; Dunford, W.G. An LLC Resonant DC–DC Converter for Wide Output Voltage Range Battery Charging Applications. IEEE Trans. Power Electron. 2013, 28, 5437–5445. [Google Scholar] [CrossRef]
- Wang, C.-S.; Zhang, S.-H.; Wang, Y.-f.; Chen, B.; Liu, J.-H. A 5-kW Isolated High Voltage Conversion Ratio Bidirectional CLTC Resonant DC–DC Converter With Wide Gain Range and High Efficiency. IEEE Trans. Power Electron. 2019, 34, 340–355. [Google Scholar] [CrossRef]
- Ortiz, G.; Leibl, M.G.; Huber, J.E.; Kolar, J.W. Design and Experimental Testing of a Resonant DC–DC Converter for Solid-State Transformers. IEEE Trans. Power Electron. 2017, 32, 7534–7542. [Google Scholar] [CrossRef]
- Zhou, A.A.; Yang, B.X.; Tian, C.M.; Wang, D.N.; Wang, E.L. Analysis and Design of LLC Resonant Converters Operating in Reverse Mode. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Korea, 27–30 May 2019. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, J.; Yang, J.; Zhao, N.; Wang, Y.; Zheng, T.Q. An LLC-LC Type Bidirectional Control Strategy for an LLC Resonant Converter in Power Electronic Traction Transformer. IEEE Trans. Power Electron. 2018, 65, 8595–8604. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Z.; Zhang, J.; Zhu, W.; Ren, X.; Hu, C. A Bidirectional Synchronous/Asynchronous Rectifier Control for Wide Battery Voltage Range in SiC Bidirectional LLC Chargers. IEEE Trans. Power Electron. 2022, 37, 6090–6101. [Google Scholar] [CrossRef]
- Li, Y.; Shao, S.; Chen, S.; Zhang, J.; Sheng, K. High-gain high-efficiency IPOS LLC converter with coupled transformer and current sharing capability. CPSS Trans. Power Electron. Appl. 2020, 5, 63–73. [Google Scholar] [CrossRef]
- Ma, J.; Wei, X.; Hu, L.; Zhang, J. LED Driver Based on Boost Circuit and LLC Converter. IEEE Access 2018, 6, 49588–49600. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, Y.; Han, B. A Two-Stage Isolated/Bidirectional DC/DC Converter With Current Ripple Reduction Technique. IEEE Trans. Power Electron. 2012, 59, 644–646. [Google Scholar] [CrossRef]
- Liao, Y.; Peng, T.; Su, M.; Sun, Y.; Xiong, W.; Xu, G. A Bidirectional DAB-LLC DCX to Achieve Voltage Regulation and Wide ZVS Range Capability. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Lyon, France, 7–11 September 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Liao, Y.; Xu, G.; Sun, Y.; Peng, T.; Su, M.; Guo, B.; Xiong, W. Single-Stage DAB-LLC Hybrid Bidirectional Converter With Tight Voltage Regulation Under DCX Operation. IEEE Trans. Ind. Electron. 2021, 68, 293–303. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Ma, Y.; Wang, X.; Yang, J.; Wu, X. Unified Modeling, Analysis, and Design of Isolated Bidirectional CLLC Resonant DC–DC Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2305–2318. [Google Scholar] [CrossRef]
- Zuo, Y.; Pan, X.; Zhu, J.; Ye, J.; Wang, Y. A Bidirectional Isolated LLC Resonant Converter with Configurable Structure for Wide Output Voltage Range Applications. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 29 November–2 December 2020; pp. 1716–1721. [Google Scholar] [CrossRef]
- He, P.; Mallik, A.; Sankar, A.; Khaligh, A. Design of a 1-MHz High-Efficiency High-Power-Density Bidirectional GaN-Based CLLC Converter for Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 213–223. [Google Scholar] [CrossRef]
- Lin, F.; Zhang, X.; Li, X. Design Methodology for Symmetric CLLC Resonant DC Transformer Considering Voltage Conversion Ratio, System Stability, and Efficiency. IEEE Trans. Power Electron. 2021, 36, 10157–10170. [Google Scholar] [CrossRef]
- Min, J.; Ordonez, M. Bidirectional Resonant CLLC Charger for Wide Battery Voltage Range: Asymmetric Parameters Methodology. IEEE Trans. Power Electron. 2021, 36, 6662–6673. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, Y.; Wang, F.; Ming, J. Synchronous Rectification Control Strategy for Bidirectional Full-bridge LLC Resonant Converter. In Proceedings of the 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Jiang, T.; Zhang, J.; Wu, X.; Sheng, K.; Wang, Y. A Bidirectional LLC Resonant Converter With Automatic Forward and Backward Mode Transition. IEEE Trans. Power Electron. 2015, 30, 757–770. [Google Scholar] [CrossRef]
- Jaiswal, V.K.; Ghoshal, A. A Design Methodology of Bidirectional LLC Resonant Converter for Energy Storage Systems. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Seogwipo, Korea, 8–10 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Kim, E.-S.; Park, J.-H.; Joo, J.-S.; Lee, S.-M.; Kim, K.; Kong, Y.-S. Bidirectional DC-DC Converter using Secondary LLC Resonant Tank. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2104–2108. [Google Scholar] [CrossRef]
- Jiang, T.; Zhang, J.; Wu, X.; Sheng, K.; Wang, Y. A Bidirectional Three-Level LLC Resonant Converter With PWAM Control. IEEE Trans. Power Electron. 2016, 31, 2213–2225. [Google Scholar] [CrossRef]
- Deng, G.; Ouyang, Q.; Xu, G.; Sun, Y.; Su, M. Modified Topology and PWM Modulation for Bidirectional LLC-DCX Converter with Center-Tapped Transformer. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- He, J.; Zhang, J.; Ma, H. Design of a Bi-directional Full Bridge LLC Resonant Converter with a Higher Normalized Voltage Gain under Backward Mode. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. 1–9. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switch Name | Turn-On | Turn-Off |
|---|---|---|
| S1 | ZCS | ZCS |
| S2 | ZCS | ZCS |
| S3 | ZCS | Hard switch in CCM ZCS in DCM |
| S4 | Hard switch in CCM ZCS in DCM | ZCS |
| S5 and S8 | ZVS | Hard switch |
| S6 and S7 | ZVS | Hard switch |
| The Proposed Method | The Method with Changing Topology | The Method in [23] | |
|---|---|---|---|
| Additional components | No | Yes | No |
| Efficiency in forward mode | No influence | Some influence | No influence |
| Efficiency in backward mode | Slightly lower | High | Low |
| Parameter design difficulty | Low | High | Low |
| Control difficulty | Low | High | High |
| Smooth Transition between different modes | Yes | Yes | No |
| Ripple characteristics | Slightly high | Low | Slightly high |
| Parameter Name | Value |
|---|---|
| Resonance frequency fr/kHz | 207 |
| Transformer turn ratio | 1 |
| Resonance inductance Lr/μH | 4 |
| Resonance capacitor Cr/nF | 142 |
| Excitation inductance Lm/μH | 19.45 |
| Secondary side voltage V2/V | 50 |
| Primary side rated load R/Ω | 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, J.; Wu, X.; Wang, Y.; Jing, L.; Zhang, W.; Tong, Y. Backward Step-Up Control Strategy for Bidirectional LLC Resonant Converter. Energies 2022, 15, 4471. https://doi.org/10.3390/en15124471
Niu J, Wu X, Wang Y, Jing L, Zhang W, Tong Y. Backward Step-Up Control Strategy for Bidirectional LLC Resonant Converter. Energies. 2022; 15(12):4471. https://doi.org/10.3390/en15124471
Chicago/Turabian StyleNiu, Jingkai, Xuezhi Wu, Yue Wang, Long Jing, Weige Zhang, and Yibin Tong. 2022. "Backward Step-Up Control Strategy for Bidirectional LLC Resonant Converter" Energies 15, no. 12: 4471. https://doi.org/10.3390/en15124471
APA StyleNiu, J., Wu, X., Wang, Y., Jing, L., Zhang, W., & Tong, Y. (2022). Backward Step-Up Control Strategy for Bidirectional LLC Resonant Converter. Energies, 15(12), 4471. https://doi.org/10.3390/en15124471