
Adaline-Based Control Schemes for Non-Sinusoidal Multiphase Drives–Part I: Torque Optimization for Healthy Mode


Abstract
:1. Introduction
2. Mathematical Model of a Seven-Phase PMSM
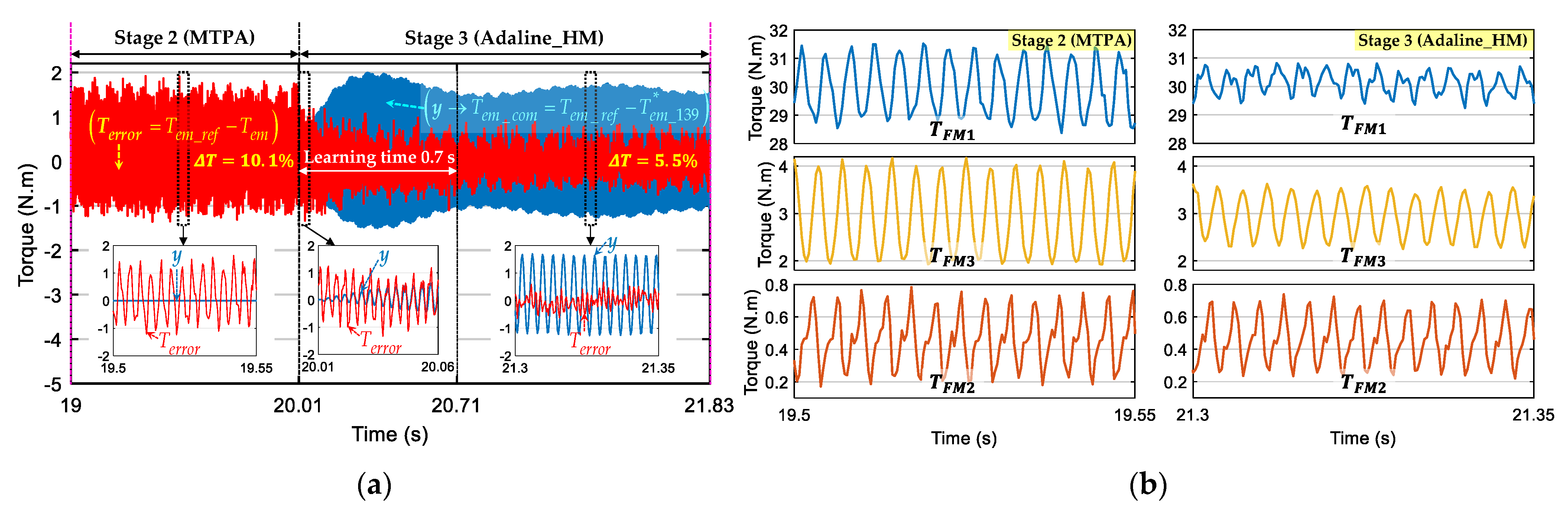
- The 1st and 13th are associated with FM1;
- The 9th and 19th are associated with FM2;
- The 3rd and 11th are associated with FM3.
3. Classical Control of Multiphase Drives for Healthy Mode
4. Proposed Adaline-Based Control Scheme for Healthy Mode
4.1. Simplified MTPA (SMTPA)
4.2. Structure of Proposed Control Scheme for Healthy Mode
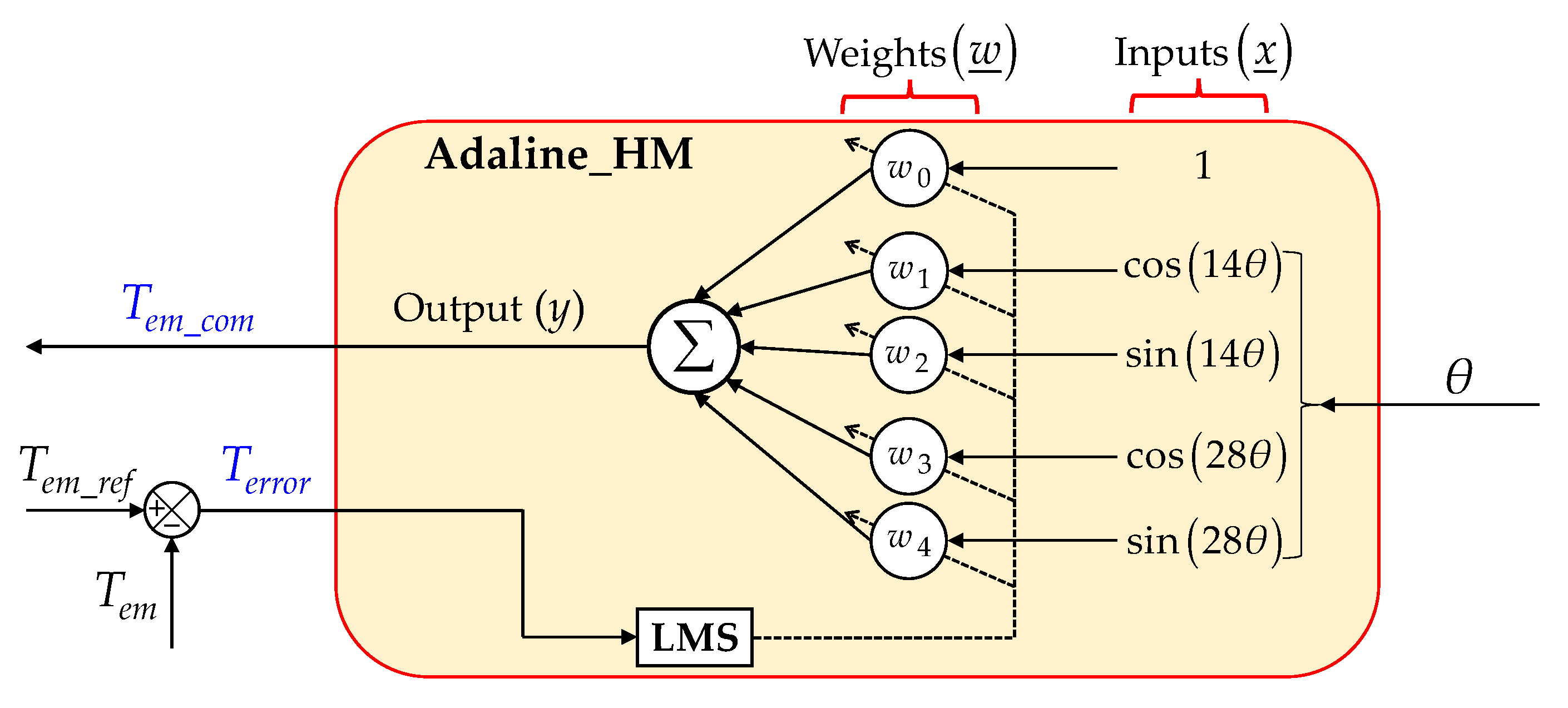
4.3. Structure of Proposed Adaline for Healthy Mode
5. Numerical and Experimental Results
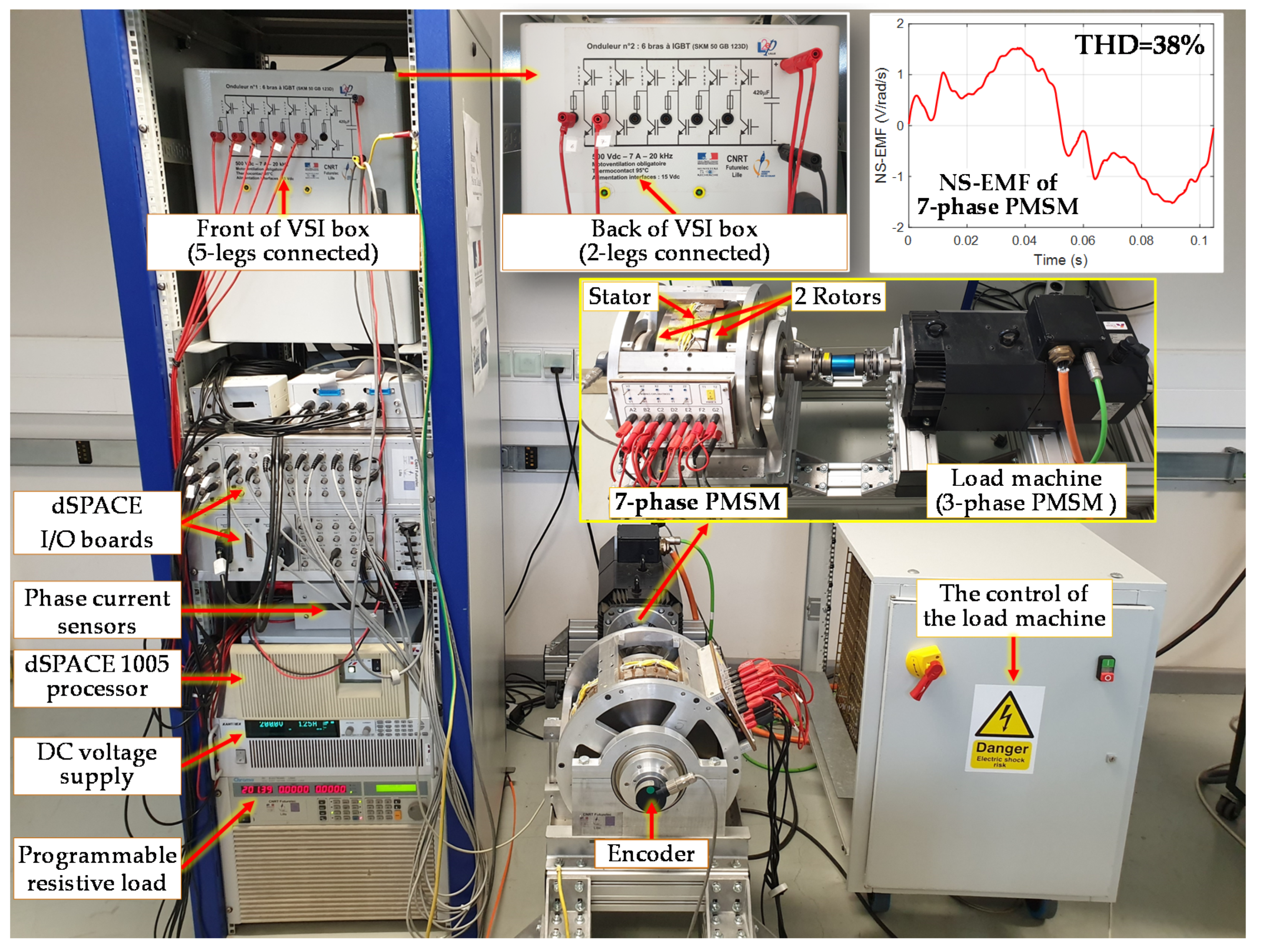
5.1. Descriptions of Experimental Seven-Phase Test Bench
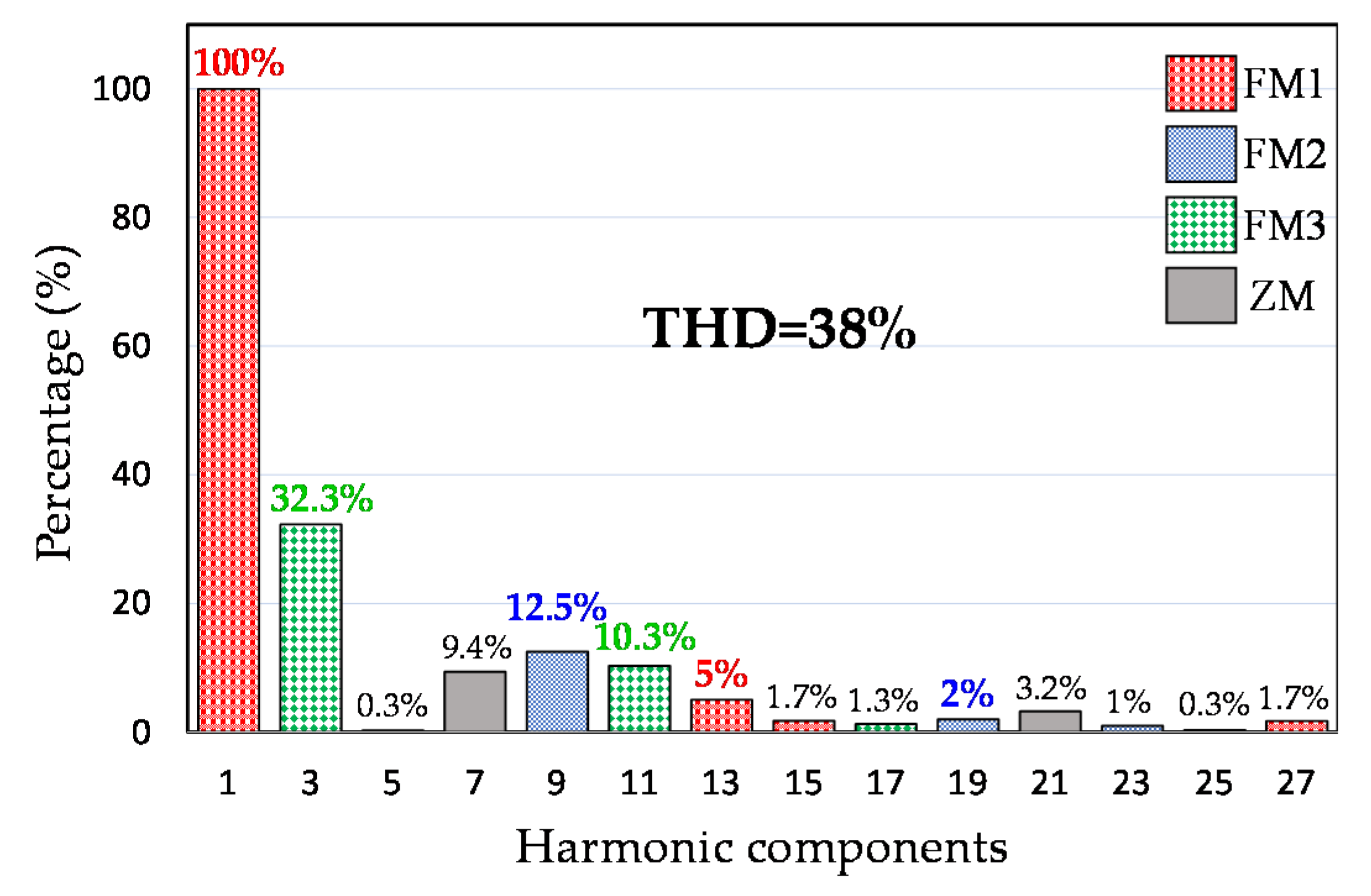
- FM1: The 1st (100%) and 13th (5% of the 1st);
- FM2: The 9th (12.5% of the 1st) and 19th (2% of the 1st);
- FM3: The 3rd (32.3% of the 1st) and 11th (10.3% of the 1st).
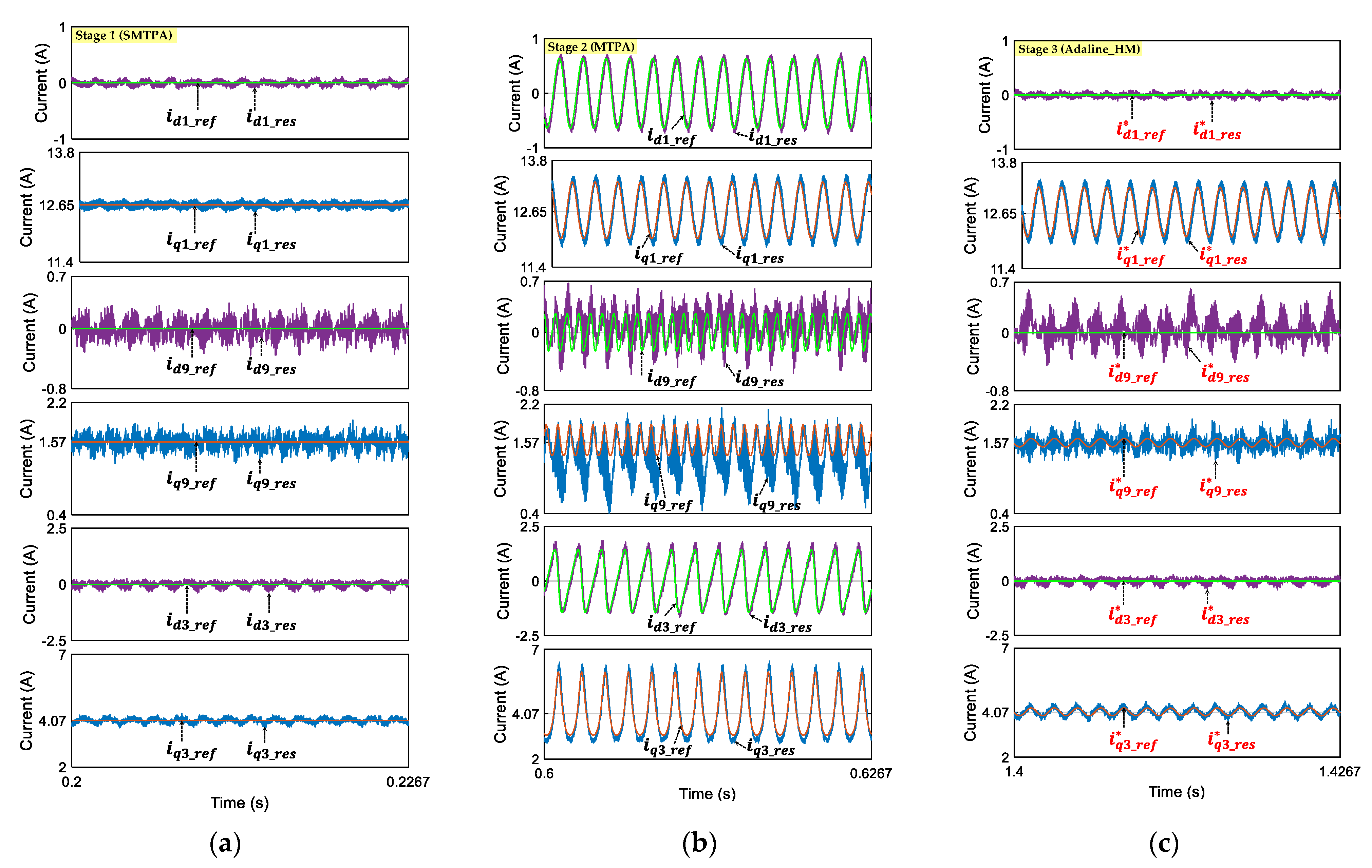
5.2. Numerical Results
- Stage 1: The classical RFOC scheme (Figure 1) with SMTPA is used. Reference d-q currents are constant, but there are torque ripples as described in (12);
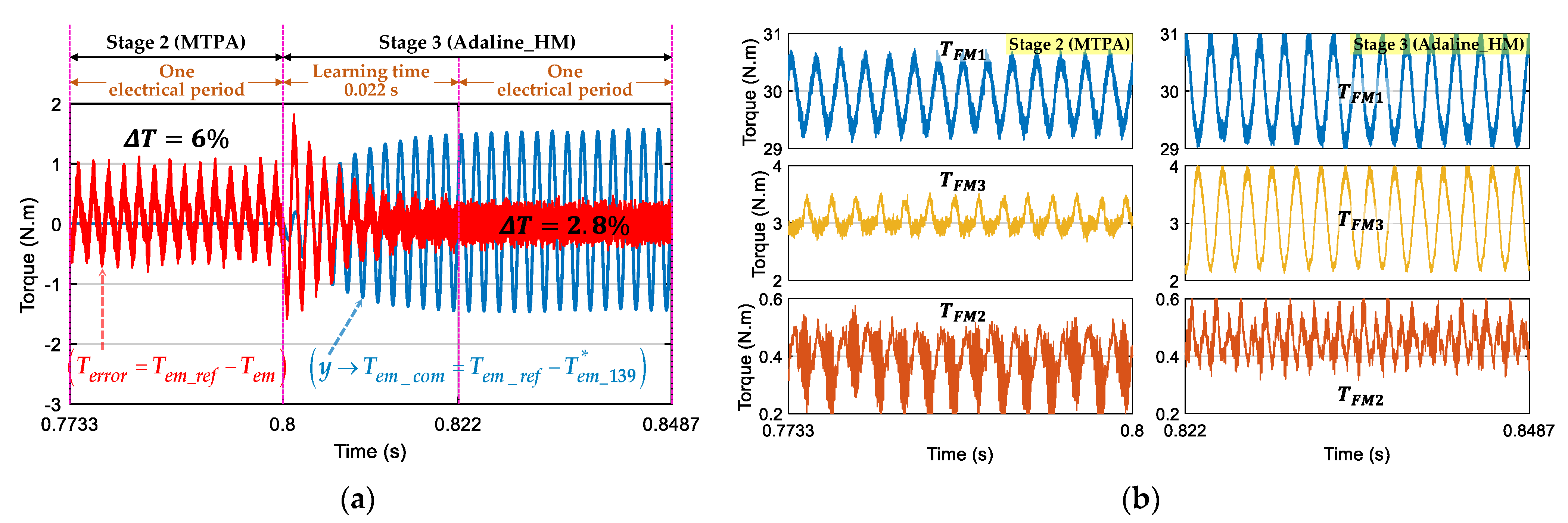
- Stage 2: The classical RFOC scheme (Figure 1) with MTPA is used. Reference d-q currents are no longer constant, but the torque ripples are theoretically eliminated;
- Stage 3: The proposed Adaline-based control scheme (Figure 2) is used. Three reference d-axis currents are zero while three reference q-axis currents are no longer constant. The torque ripples are theoretically eliminated. The compensating torque Tem_com firstly contains both 14θ and 28θ (5 weights w0, w1, w2, w3, and w4 are used), then Tem_com contains only 14θ (3 weights w0, w1, and w2 are used).
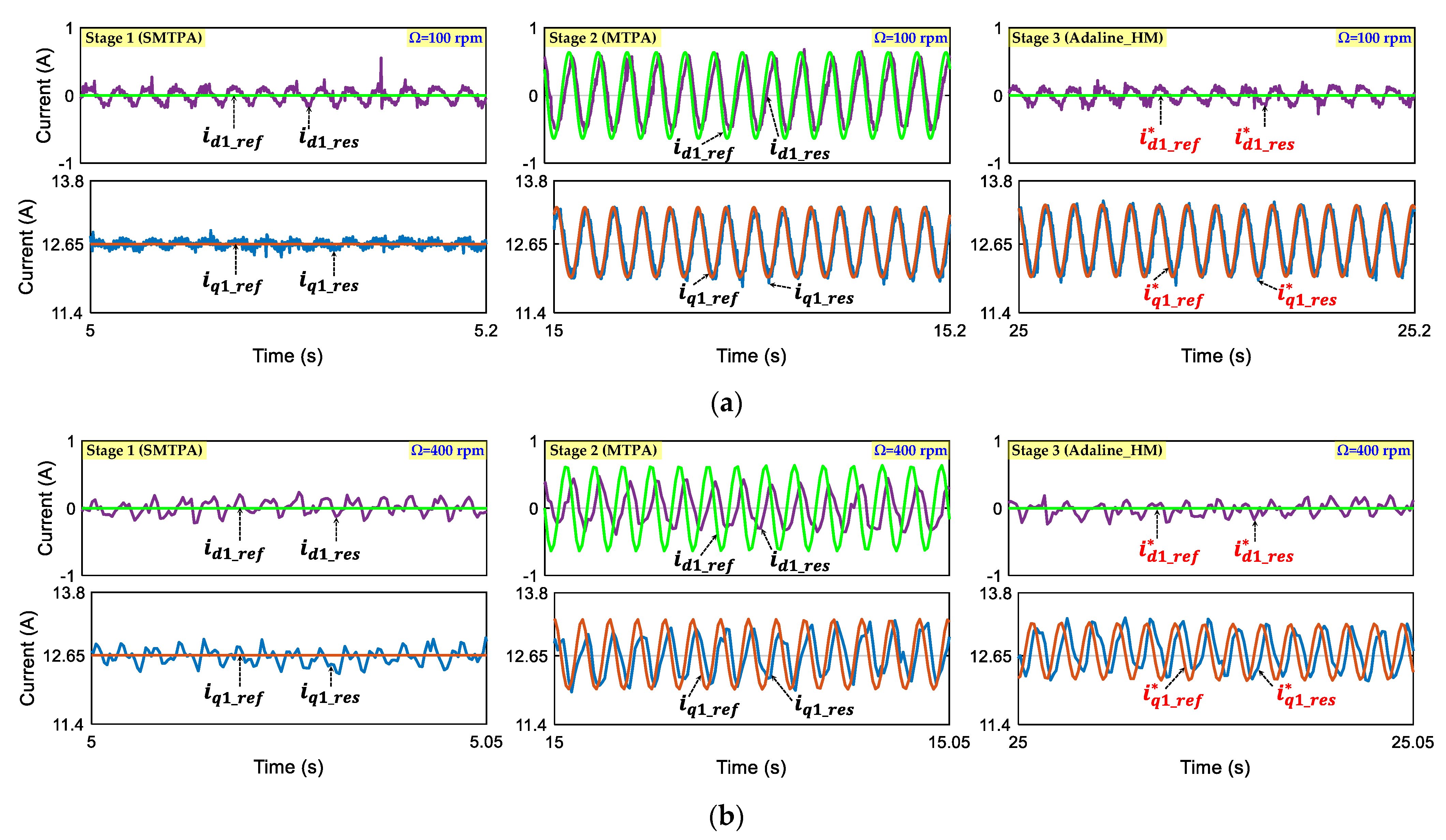
5.3. Experimental Results
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Levi, E. Multiphase Electric Machines for Variable-Speed Applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Barrero, F.; Duran, M.J. Recent Advances in the Design, Modeling, and Control of Multiphase Machines Part I. IEEE Trans. Ind. Electron. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Semail, E.; Kestelyn, X.; Bouscayrol, A. Right harmonic spectrum for the back-electromotive force of an n-phase synchronous motor. In Proceedings of the 39th IEEE Industry Applications Conference, Seattle, WA, USA, 1 October 2004; pp. 71–78. [Google Scholar]
- Kindl, V.; Cermak, R.; Ferkova, Z.; Skala, B. Review of Time and Space Harmonics in Multi-Phase Induction Machine. Energies 2020, 13, 496. [Google Scholar] [CrossRef] [Green Version]
- Slunjski, M.; Stiscia, O.; Jones, M.; Levi, E. General Torque Enhancement Approach for a Nine-Phase Surface PMSM with Built-In Fault Tolerance. IEEE Trans. Ind. Electron. 2012, 68, 6412–6423. [Google Scholar] [CrossRef]
- You, Y.-M. Optimal Design of PMSM Based on Automated Finite Element Analysis and Metamodeling. Energies 2019, 12, 4673. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Zhu, Z.Q.; Bin, H.; Gong, L.M. Current Harmonics Suppression Strategy for PMSM with Non-Sinusoidal Back-EMF Based on Adaptive Linear Neuron Method. IEEE Trans. Ind. Electron. 2020, 67, 9164–9173. [Google Scholar] [CrossRef]
- Li, X.; Jiang, G.; Chen, W.; Shi, T.; Zhang, G.; Geng, Q. Commutation Torque Ripple Suppression Strategy of Brushless DC Motor Considering Back Electromotive Force Variation. Energies 2019, 12, 1932. [Google Scholar] [CrossRef] [Green Version]
- Vu, D.T.; Nguyen, N.K.; Semail, E.; Moraes, T.J.d.S. Control strategies for non-sinusoidal multiphase PMSM drives in faulty modes under constraints on copper losses and peak phase voltage. IET Electr. Power Appl. 2019, 13, 1743–1752. [Google Scholar] [CrossRef] [Green Version]
- Dwari, S.; Parsa, L. An Optimal Control Technique for Multiphase PM Machines Under Open-Circuit Faults. IEEE Trans. Ind. Electron. 2008, 55, 1988–1995. [Google Scholar] [CrossRef]
- Kestelyn, X.; Semail, E. A Vectorial Approach for Generation of Optimal Current References for Multiphase Permanent-Magnet Synchronous Machines in Real Time. IEEE Trans. Ind. Electron. 2011, 58, 5057–5065. [Google Scholar] [CrossRef] [Green Version]
- Cervone, A.; Dordevic, O.; Brando, G. General Approach for Modeling and Control of Multiphase PMSM Drives. IEEE Trans. Power Electron. 2021, 36, 10490–10503. [Google Scholar] [CrossRef]
- Li, G.; Hu, J.; Li, Y.; Zhu, J. An Improved Model Predictive Direct Torque Control Strategy for Reducing Harmonic Currents and Torque Ripples of Five-Phase Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2019, 66, 5820–5829. [Google Scholar] [CrossRef]
- Wang, X.; Yan, H.; Sala, G.; Buticchi, G.; Gu, C.; Zhao, W.; Xu, L.; Zhang, H. Selective Torque Harmonic Elimination for Dual Three-Phase PMSMs Based on PWM Carrier Phase Shift. IEEE Trans. Power Electron. 2020, 35, 13255–13269. [Google Scholar] [CrossRef]
- Akay, A.; Lefley, P. Torque Ripple Reduction Method in a Multiphase PM Machine for No-Fault and Open-Circuit Fault-Tolerant Conditions. Energies 2021, 14, 2615. [Google Scholar] [CrossRef]
- Guo, L.; Parsa, L. Model Reference Adaptive Control of Five-Phase IPM Motors Based on Neural Network. IEEE Trans. Ind. Electron. 2012, 59, 1500–1508. [Google Scholar] [CrossRef]
- Usha, S.; Subramani, C.; Padmanaban, S. Neural Network-Based Model Reference Adaptive System for Torque Ripple Reduction in Sensorless Poly Phase Induction Motor Drive. Energies 2012, 12, 920. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, Y.A.I.M. A Novel Direct Instantaneous Torque and Flux Control With an ADALINE-Based Motor Model for a High Performance DD-PMSM. IEEE Trans. Power Electron. 2007, 22, 2042–2049. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, C.; Jatskevich, J.; Zhanga, S. Deadbeat Harmonic Current Control of Permanent Magnet Synchronous Machine Drives for Torque Ripple Reduction. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 1. [Google Scholar] [CrossRef]
- Flieller, D.; Nguyen, N.K.; Wira, P.; Sturtzer, G.; Abdeslam, D.O.; Mercklé, J. A Self-Learning Solution for Torque Ripple Reduction for Nonsinusoidal Permanent-Magnet Motor Drives Based on Artificial Neural Networks. IEEE Trans. Ind. Electron. 2014, 61, 655–666. [Google Scholar] [CrossRef] [Green Version]
- Qiu, T.; Wen, X.; Zhao, F. Adaptive-Linear-Neuron-Based Dead-Time Effects Compensation Scheme for PMSM Drives. IEEE Trans. Power Electron. 2016, 31, 2530–2538. [Google Scholar] [CrossRef]
- Vu, D.T.; Nguyen, N.K.; Semail, E.; Nguyen, T.T.N. Current Harmonic Eliminations for Seven-phase Non-sinusoidal PMSM Drives applying Artificial Neurons. In Proceedings of the International Conference on Engineering and Research Application (ICERA), Thai Nguyen, Vietnam, 1–2 December 2020; pp. 270–279. [Google Scholar]
- Vu, D.T.; Nguyen, N.K.; Semail, E. Torque Ripple Eliminations for Multiphase Nonsinusoidal Permanent Magnet Synchronous Machines. In Proceedings of the International Symposium on Electrical and Electronics Engineering (ISEE), Hochiminh City, Vietnam, 15–16 April 2021; pp. 178–183. [Google Scholar]
- Hung, J.Y. Design of the most efficient excitation for a class of electric motor. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1994, 41, 341–344. [Google Scholar] [CrossRef]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.A.; Williamson, S. Multiphase induction motor drives-a technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- Flieller, D.; Nguyen, N.K.; Schwab, H.; Sturtzer, G. Synchronous Machines in Degraded Mode. In Control of Non-Conventional Synchronous Motors; John Wiley and Sons: Hoboken, NJ, USA, 2013; pp. 67–124. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fictitious Machine | Reference Frame | Associated Harmonic * |
|---|---|---|
| 1st fictitious machine (FM1) | α1-β1 | 1, 13, 15, …, 7k ± 1 |
| 2nd fictitious machine (FM2) | α2-β2 | 5, 9, 19, …, 7k ± 2 |
| 3rd fictitious machine (FM3) | α3-β3 | 3, 11, 17, …, 7k ± 3 |
| Zero-sequence machine (ZM) | z | 7, 21, …, 7k |
| Parameter | Unit | Value |
|---|---|---|
| Resistance of one phase R | Ω | 1.4 |
| Self-inductance L | mH | 14.7 |
| Mutual inductance M1 | mH | 3.5 |
| Mutual inductance M2 | mH | −0.9 |
| Mutual inductance M3 | mH | −6.1 |
| Amplitude of 1st harmonic of NS-EMF En1 | V/rad/s | 1.27 |
| Number of pole pairs p | 3 | |
| Rated RMS current | A | 5.1 |
| Rated torque | N.m | 33.5 |
| Rated speed | rpm | 750 |
| Rated power | kW | 2.5 |
| Rated voltage | V | 120 |
| DC-bus voltage VDC | V | 200 |
| PWM frequency | kHz | 10 |
| Speed Ω (rpm) | ∆T with SMTPA (%) | ∆T with MTPA (%) | ∆T with Adaline_HM (%) | |||
|---|---|---|---|---|---|---|
| sim1 | exp2 | sim1 | exp2 | sim1 | exp2 | |
| 100 | 11 | 11.8 | 1.3 | 5 | 1.5 | 3.9 |
| 400 | 11.5 | 9.5 | 3 | 10.1 | 2.3 | 5.5 |
| 750 | 12 | - | 6 | - | 2.8 | - |
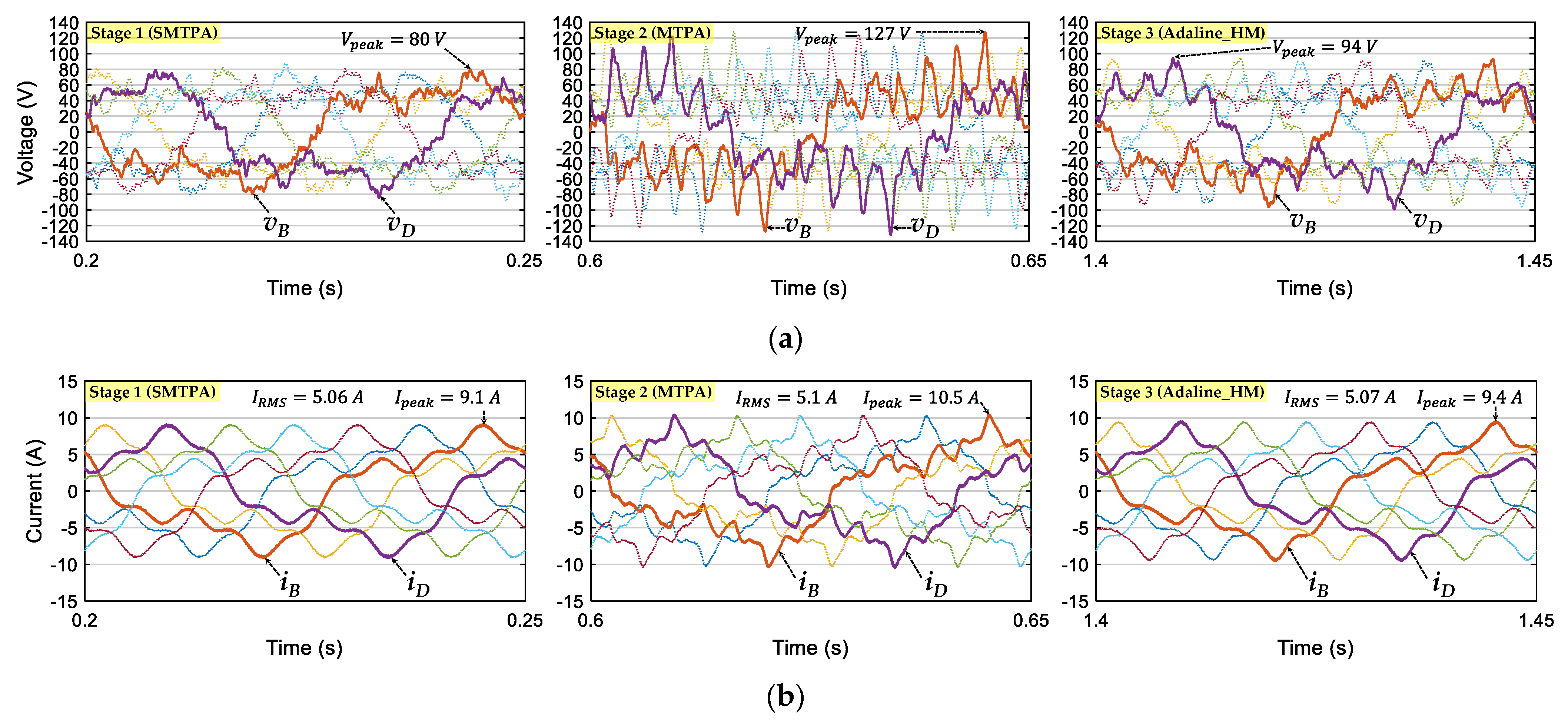
| Strategies | IRMS (A) | Ipeak (A) | Vpeak (V) | |||
|---|---|---|---|---|---|---|
| sim1 | exp2 | sim1 | exp2 | sim1 | exp2 | |
| SMTPA | 5.06 | 5.09 | 9.1 | 10 | 80 | 93.5 |
| MTPA | 5.1 | 5.08 | 10.5 | 10.1 | 127 | 98 |
| Adaline_HM | 5.07 | 5.14 | 9.4 | 10.1 | 94 | 95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vu, D.T.; Nguyen, N.K.; Semail, E.; Wu, H. Adaline-Based Control Schemes for Non-Sinusoidal Multiphase Drives–Part I: Torque Optimization for Healthy Mode. Energies 2021, 14, 8302. https://doi.org/10.3390/en14248302
Vu DT, Nguyen NK, Semail E, Wu H. Adaline-Based Control Schemes for Non-Sinusoidal Multiphase Drives–Part I: Torque Optimization for Healthy Mode. Energies. 2021; 14(24):8302. https://doi.org/10.3390/en14248302
Chicago/Turabian StyleVu, Duc Tan, Ngac Ky Nguyen, Eric Semail, and Hailong Wu. 2021. "Adaline-Based Control Schemes for Non-Sinusoidal Multiphase Drives–Part I: Torque Optimization for Healthy Mode" Energies 14, no. 24: 8302. https://doi.org/10.3390/en14248302
APA StyleVu, D. T., Nguyen, N. K., Semail, E., & Wu, H. (2021). Adaline-Based Control Schemes for Non-Sinusoidal Multiphase Drives–Part I: Torque Optimization for Healthy Mode. Energies, 14(24), 8302. https://doi.org/10.3390/en14248302