
Proposal of a Novel Mooring System Using Three-Bifurcated Mooring Lines for Spar-Type Off-Shore Wind Turbines



Abstract
:1. Introduction
2. Numerical Methods
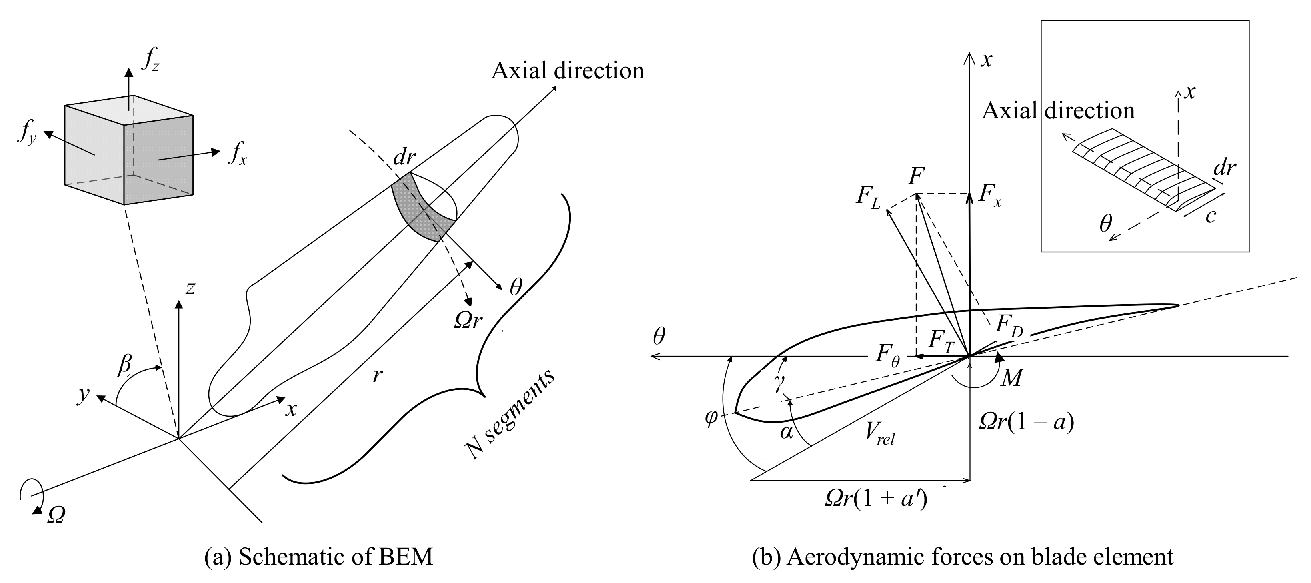
2.1. Blade Element Momentum Method
- For two-dimensional wind flow, aerodynamic lift and drag forces acting on blade element that has blade elements at its both sides are the same as those acting on isolated blade element;
- There is no interaction between any two adjacent annular flows swept by two independent blade elements along blade axial direction; thus, aerodynamic forces on each blade element are only the functions of momentum variation ratio of annular flow.
2.2. Wave Making Theory
2.2.1. Regular Wave
2.2.2. Irregular Wave
2.3. Potential Flow Theory
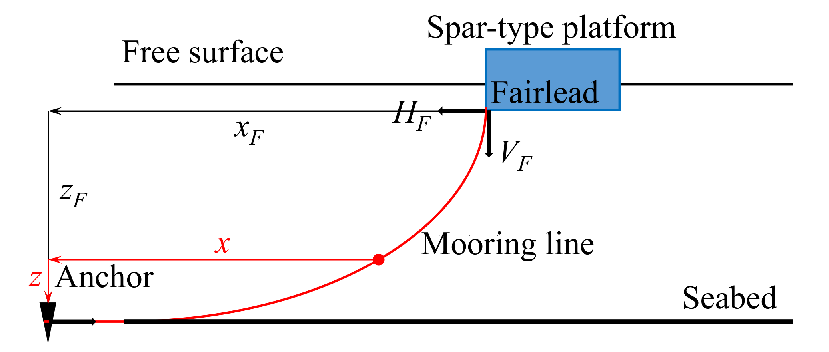
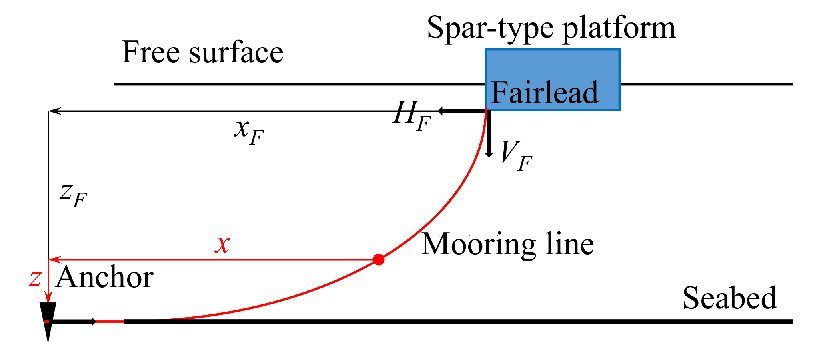
2.4. Quasi-Static Mooring System Model
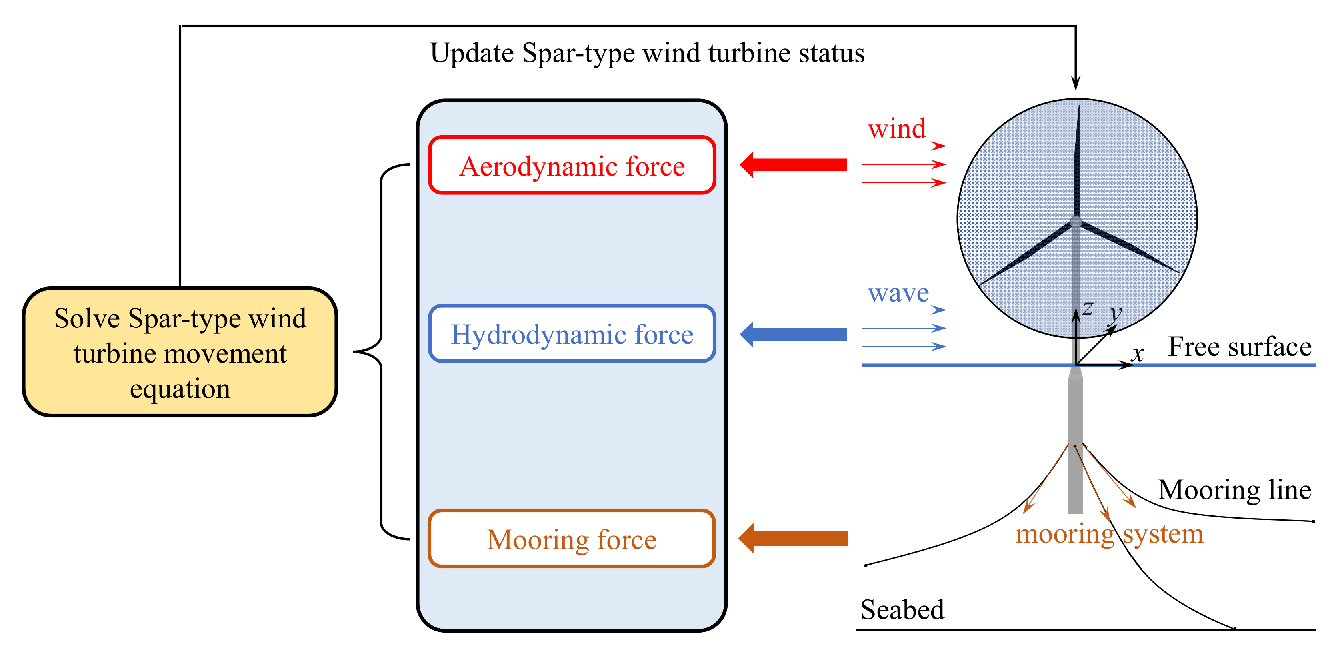
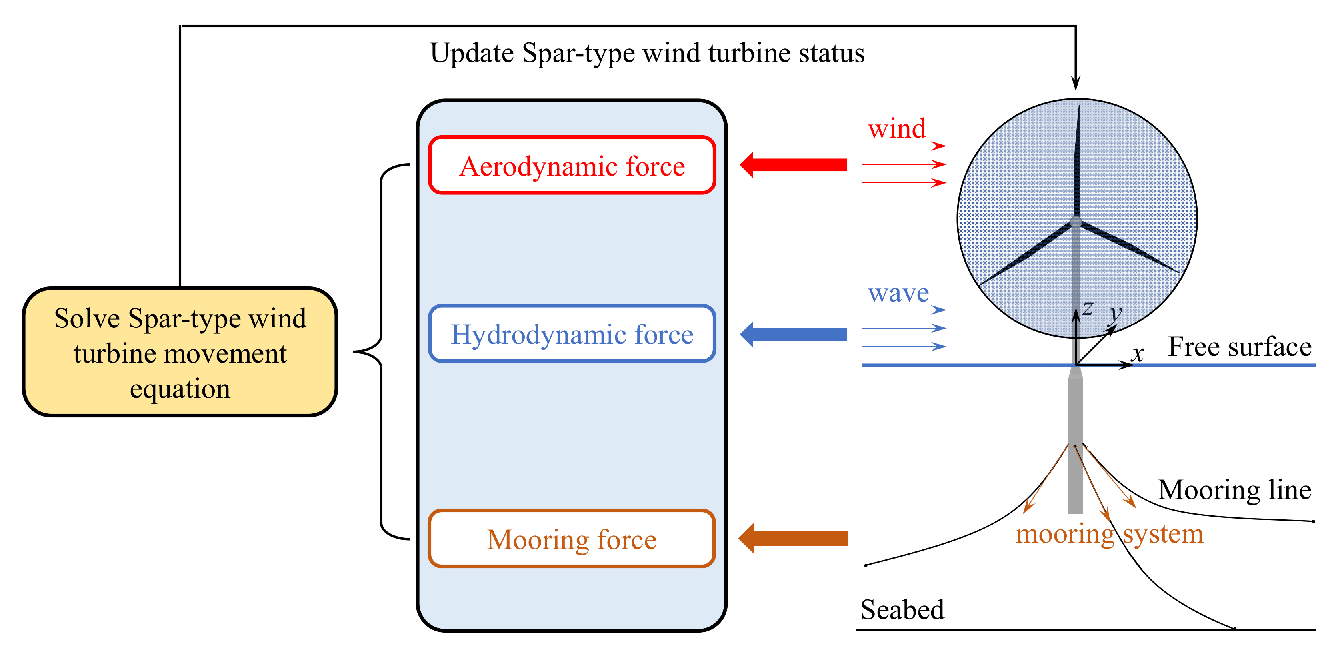
2.5. Movement Equation for Spar-Type Wind Turbine
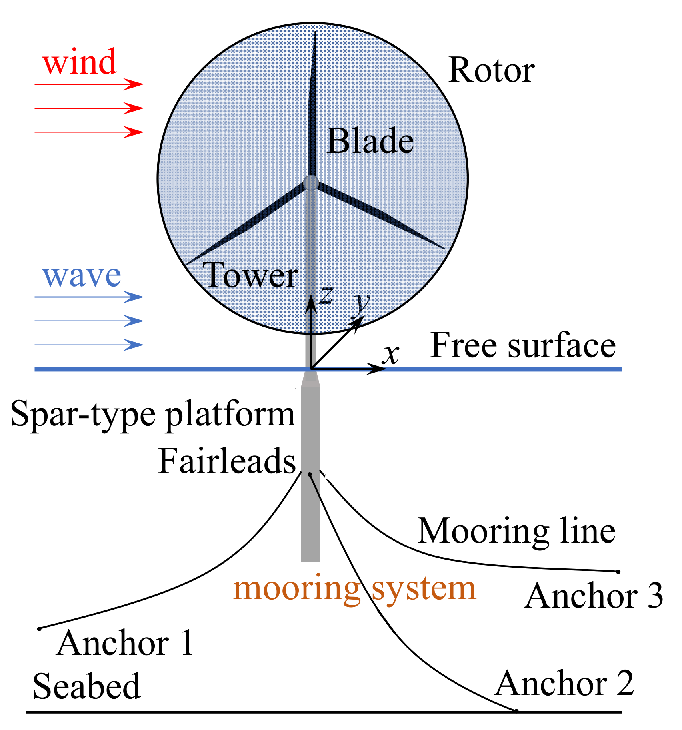
3. Spar-Type Wind Turbine
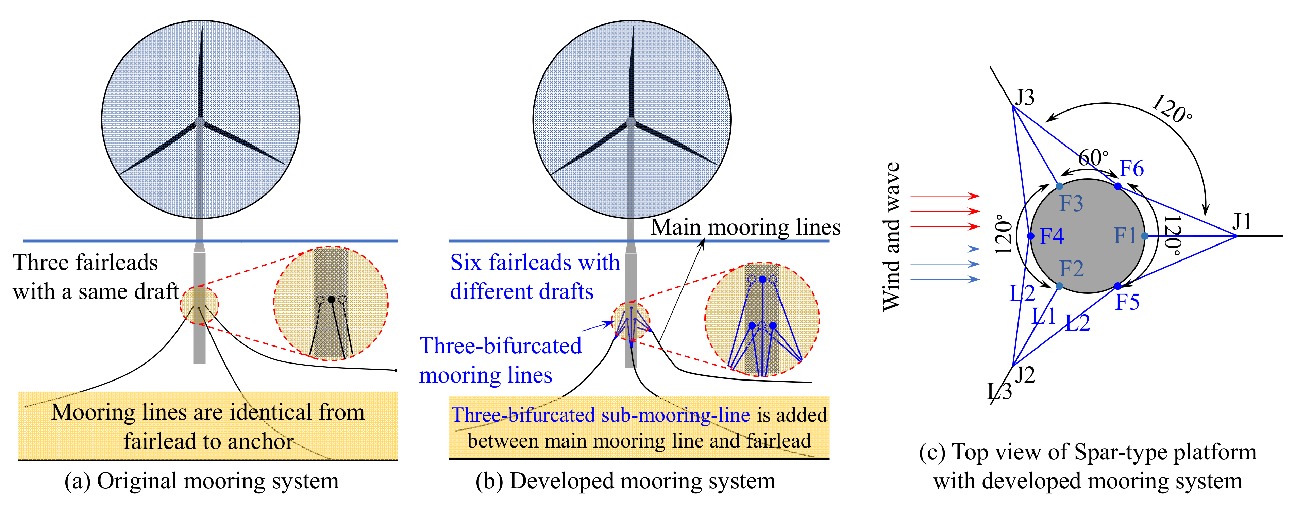
4. Three-Bifurcated Mooring System
4.1. Case Settings
4.2. Results and Discussions
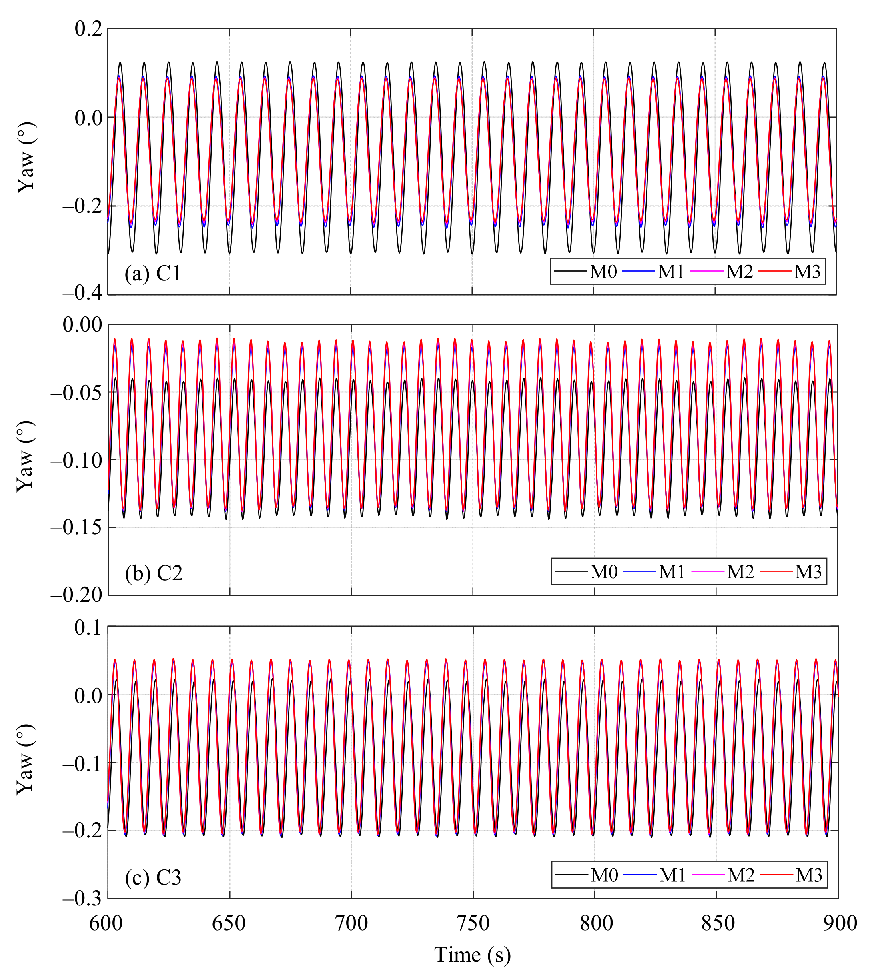
4.2.1. Regular Waves
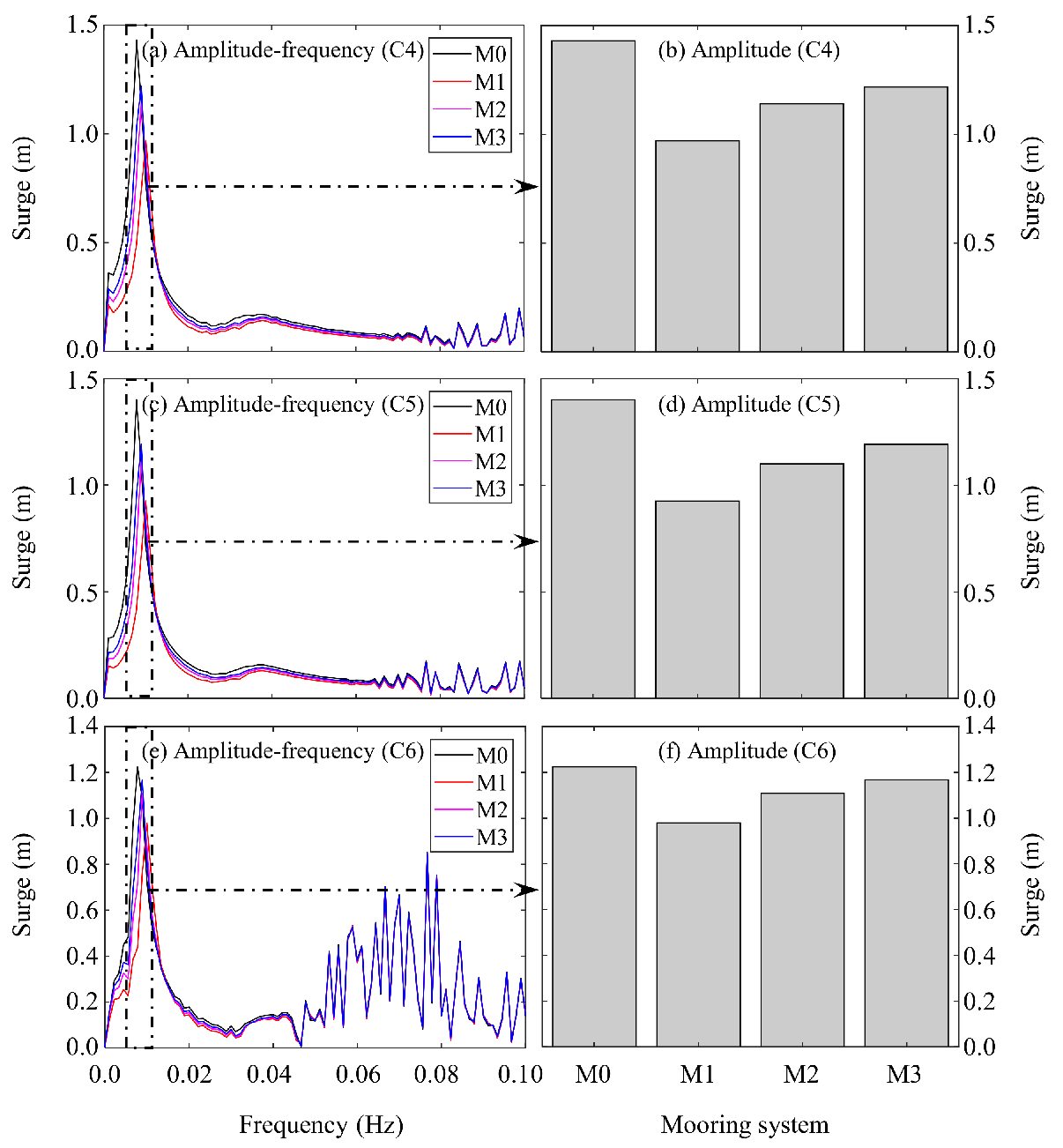
4.2.2. Irregular Waves
5. Further Developed Three-Bifurcated Mooring System
5.1. Case Settings
5.2. Results and Discussions
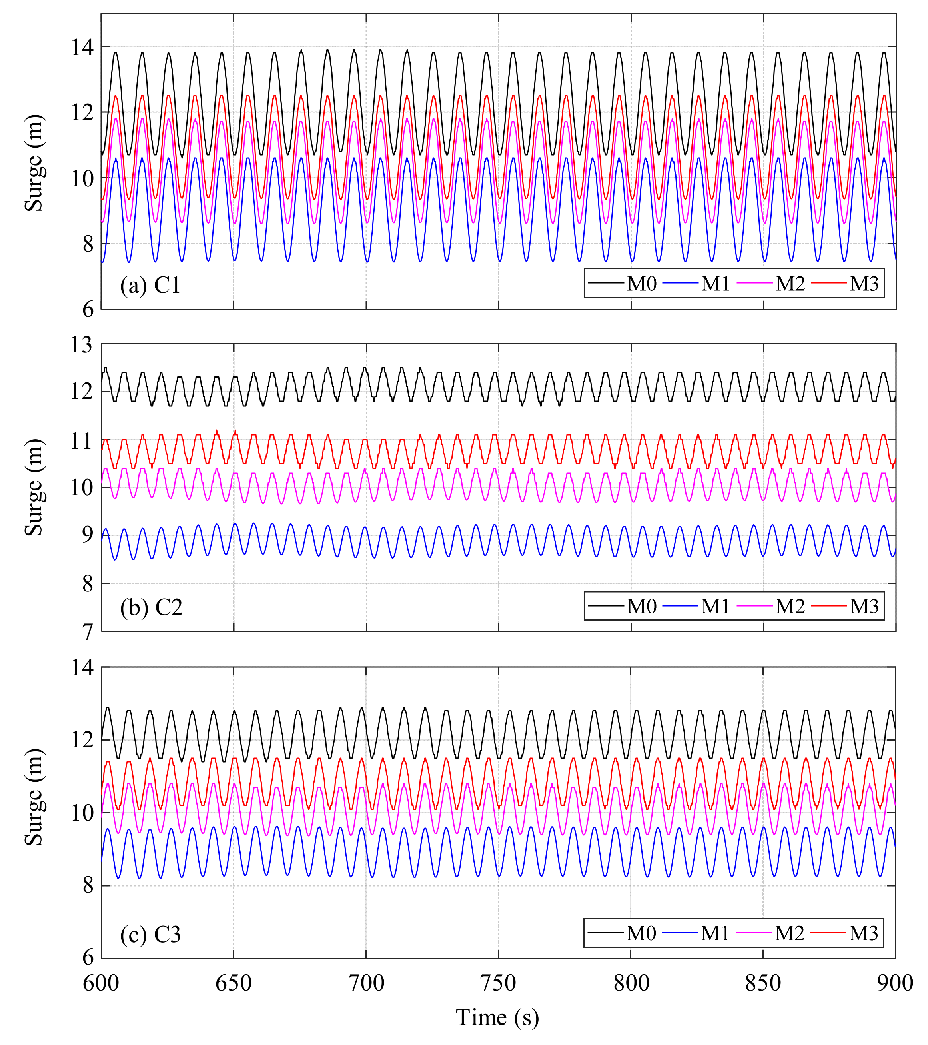
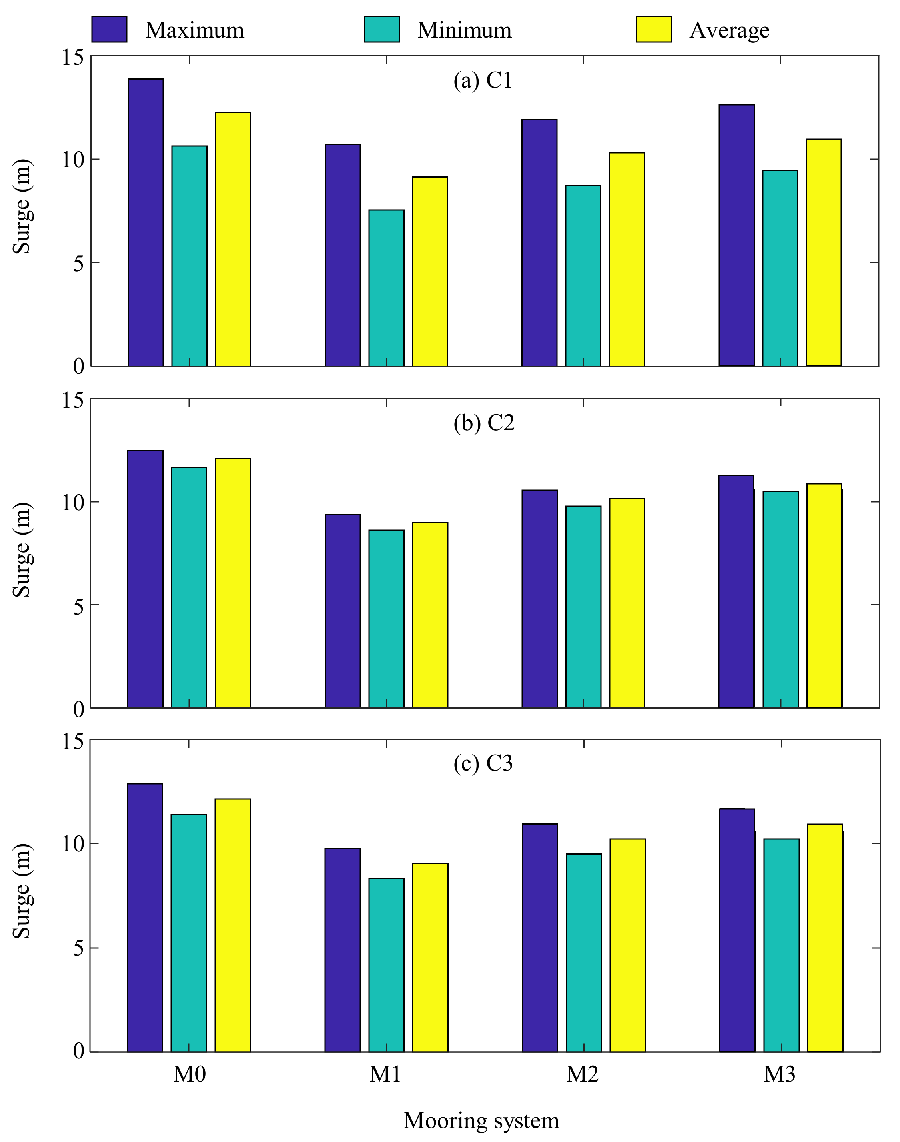
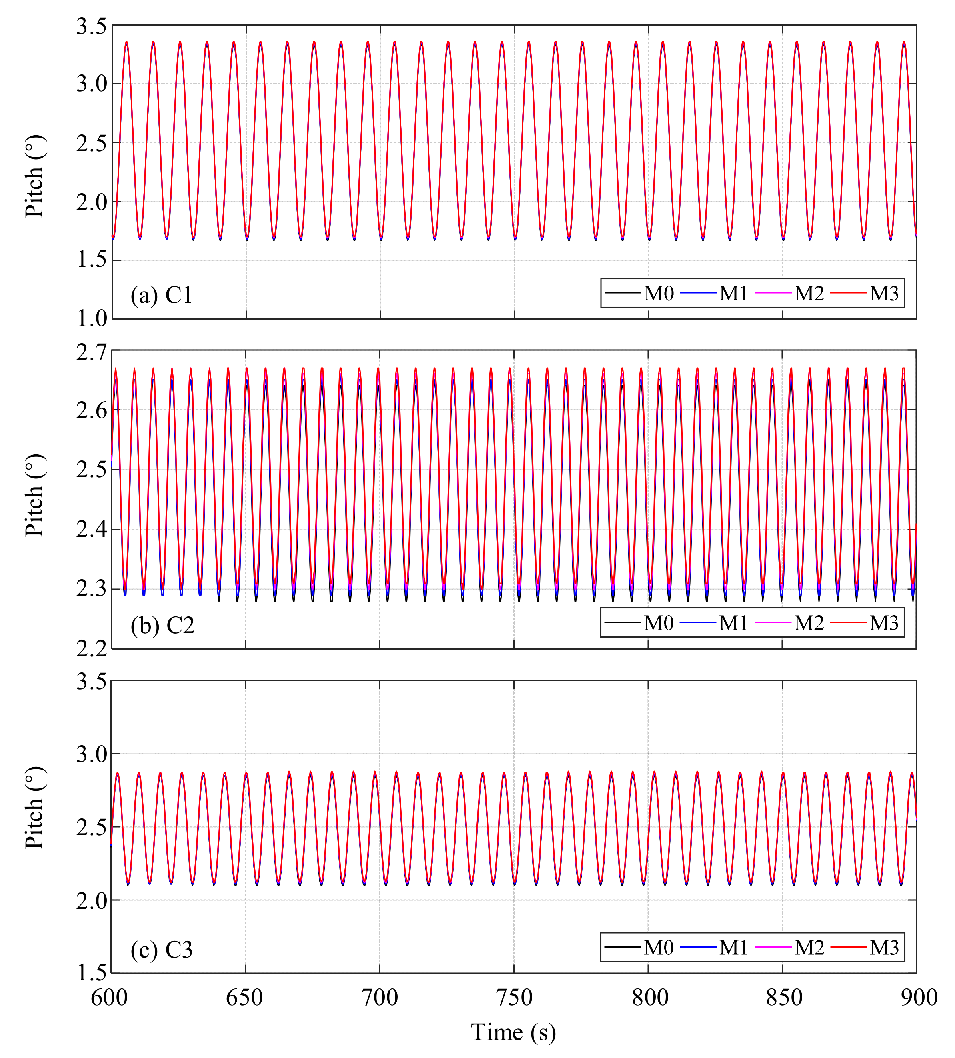
5.2.1. Regular Waves
5.2.2. Irregular Waves
6. Conclusions
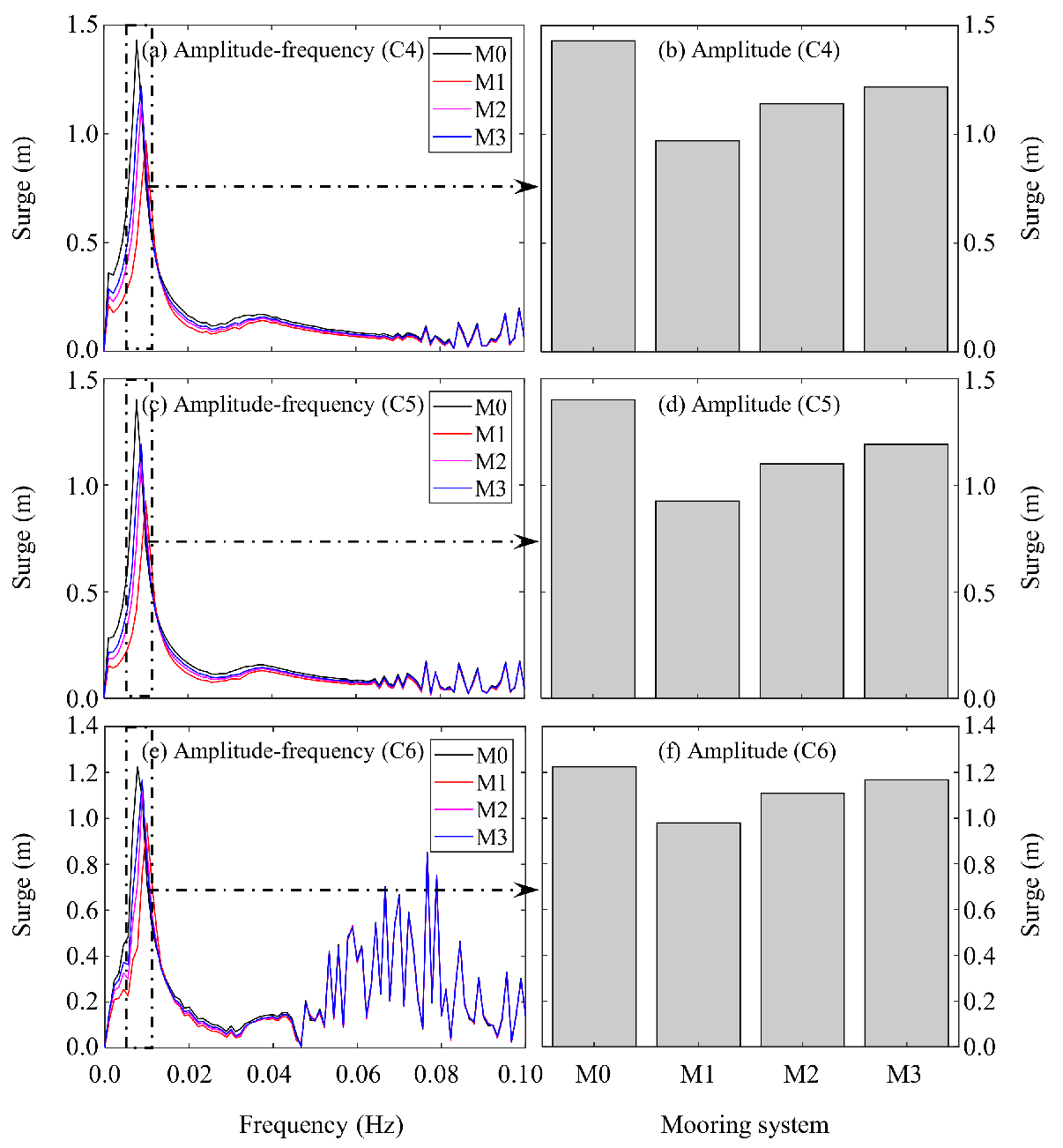
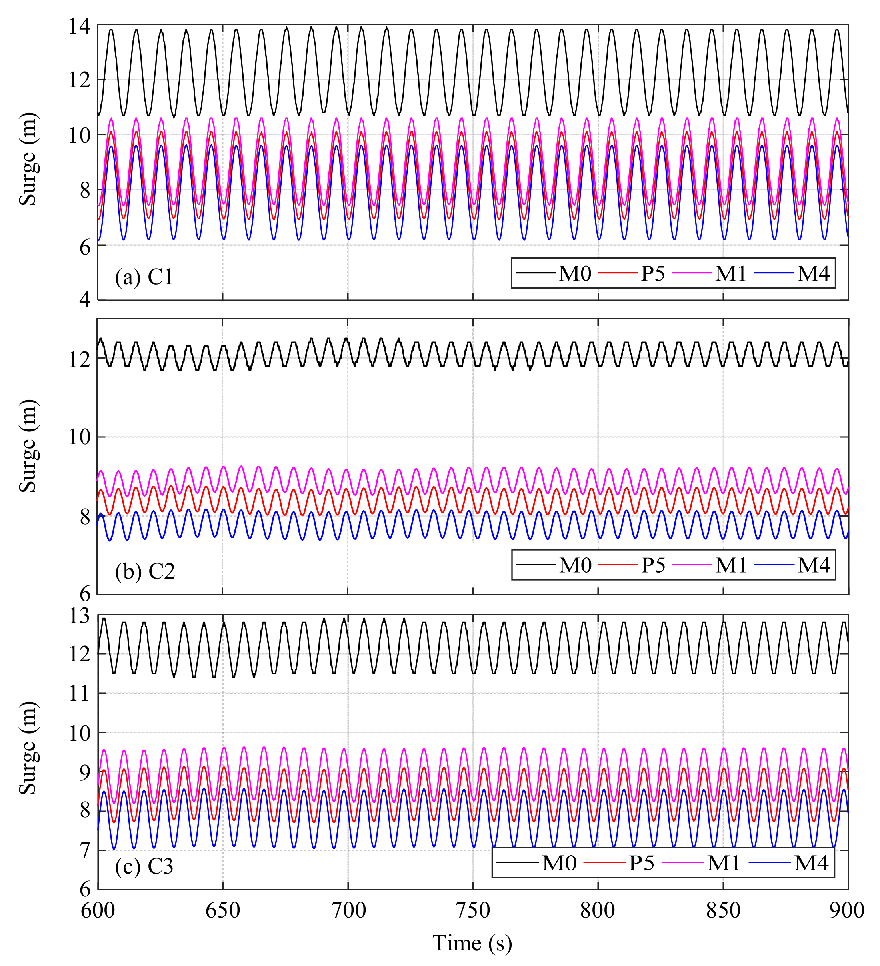
- The floating wind turbine surge, pitch, and yaw movements can be divided into two parts; specifically, one of them is the drift movement resulting from wind, which moves the wind turbine away from its static equilibrium position, and the other one is the oscillating movement resulting from waves, which makes the wind turbine move sinusoidally around the new equilibrium position after drift;
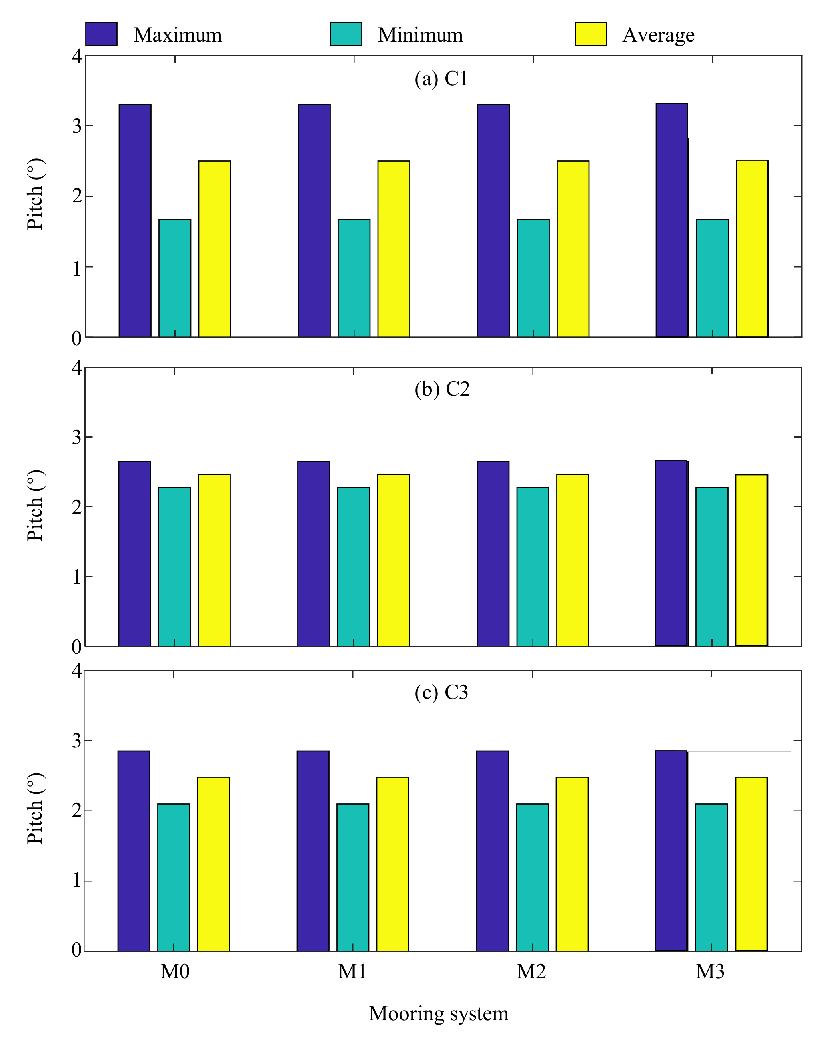
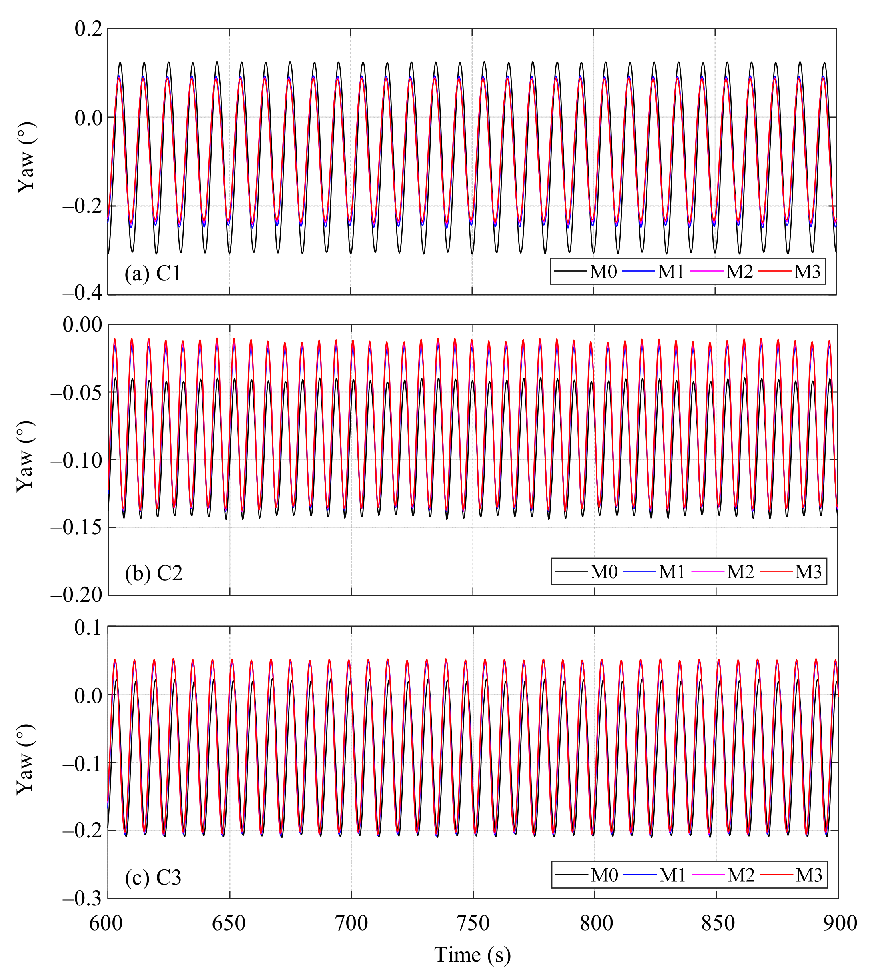
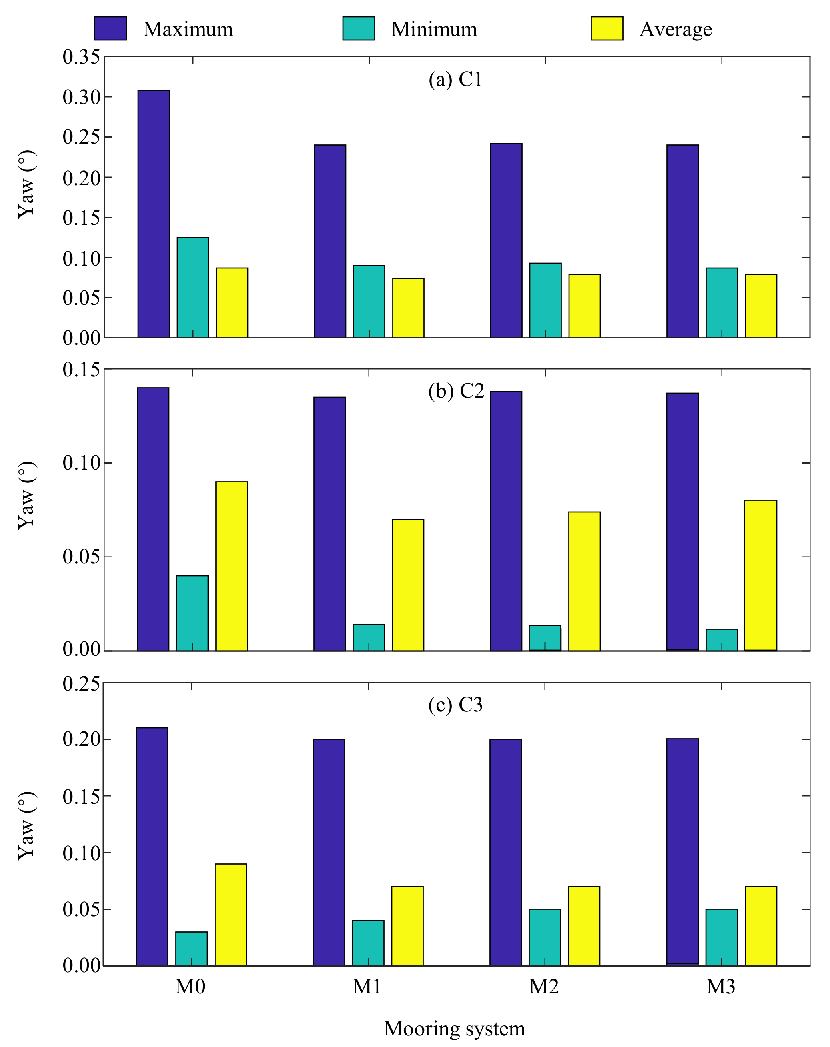
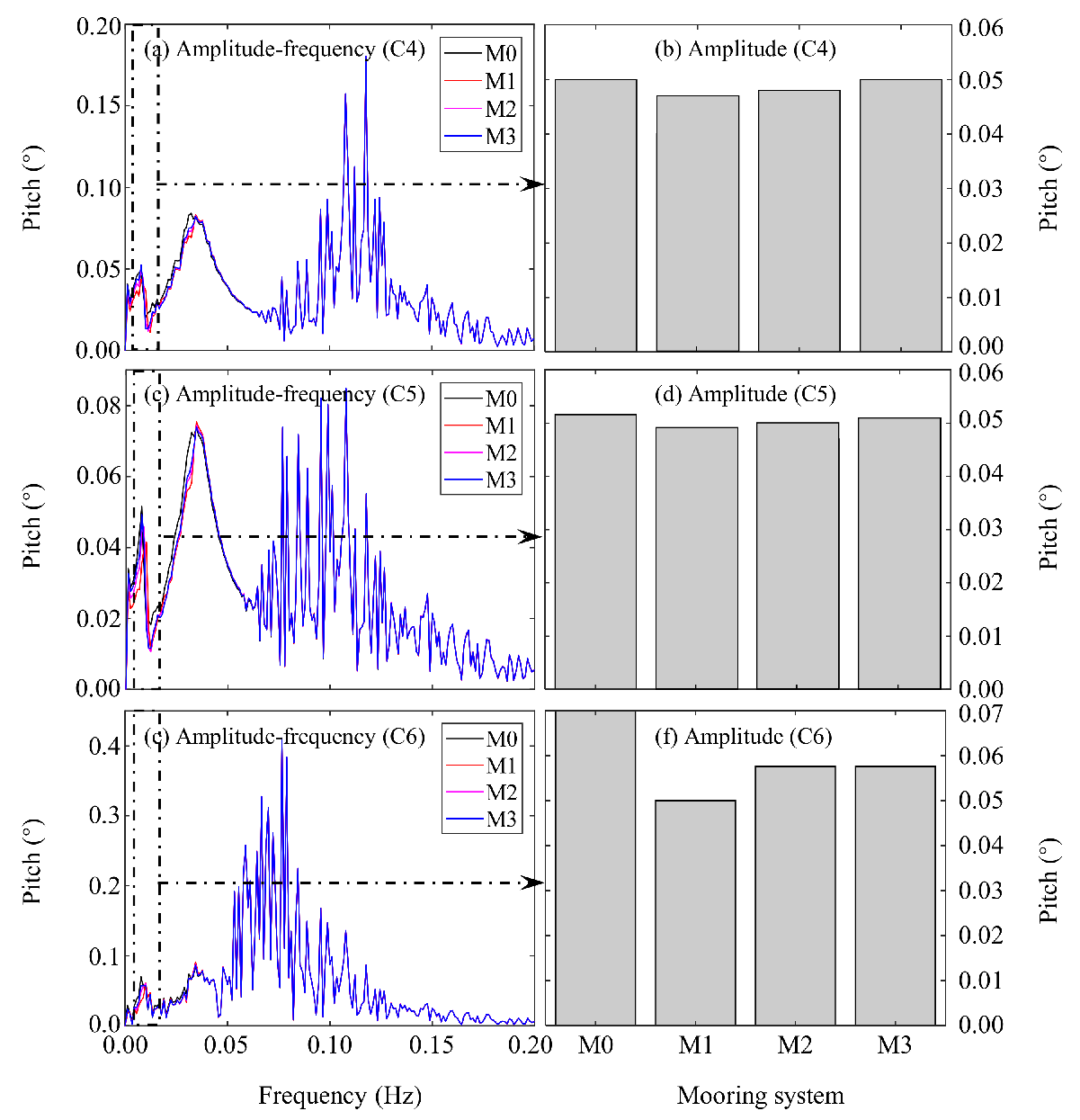
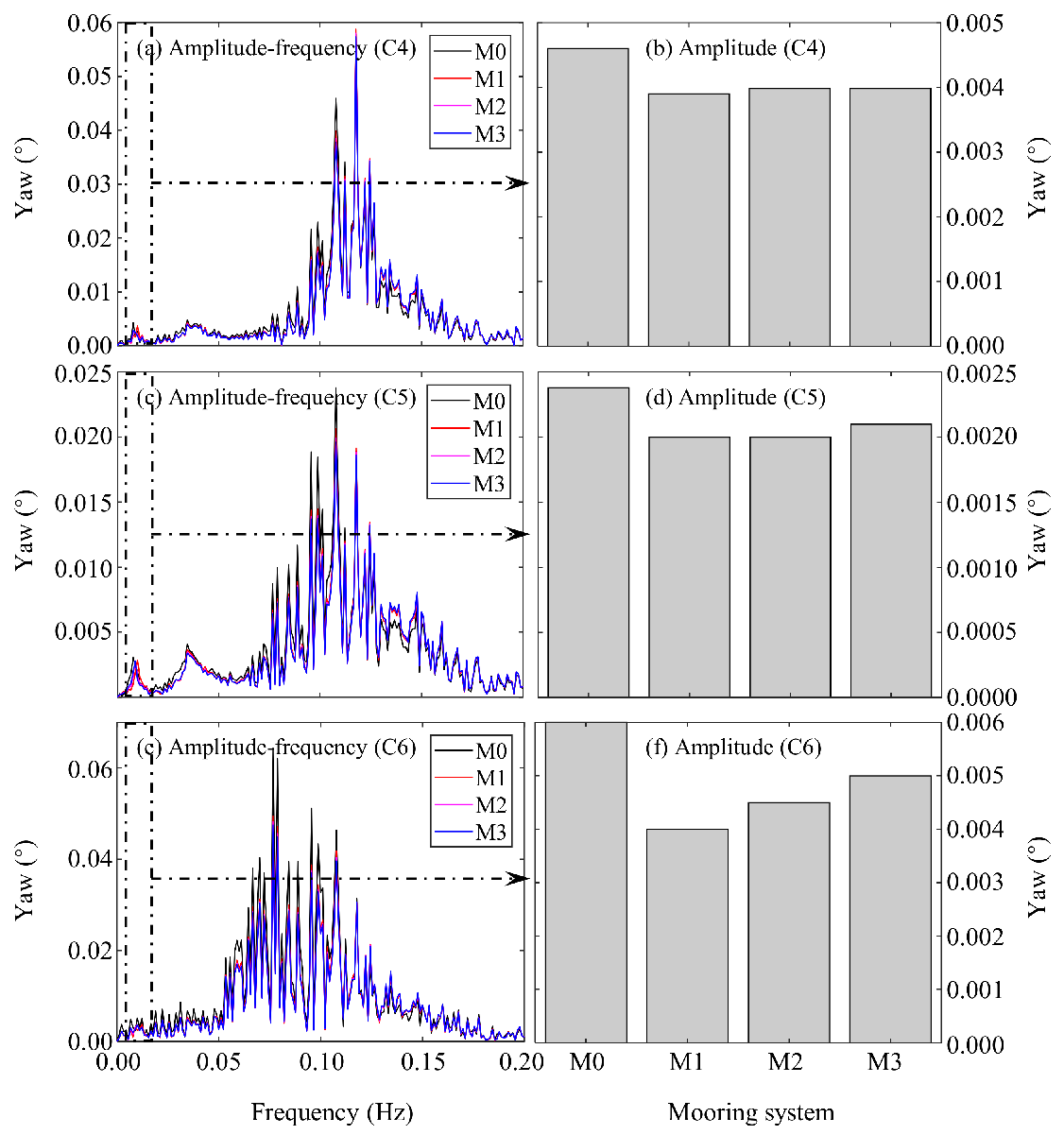
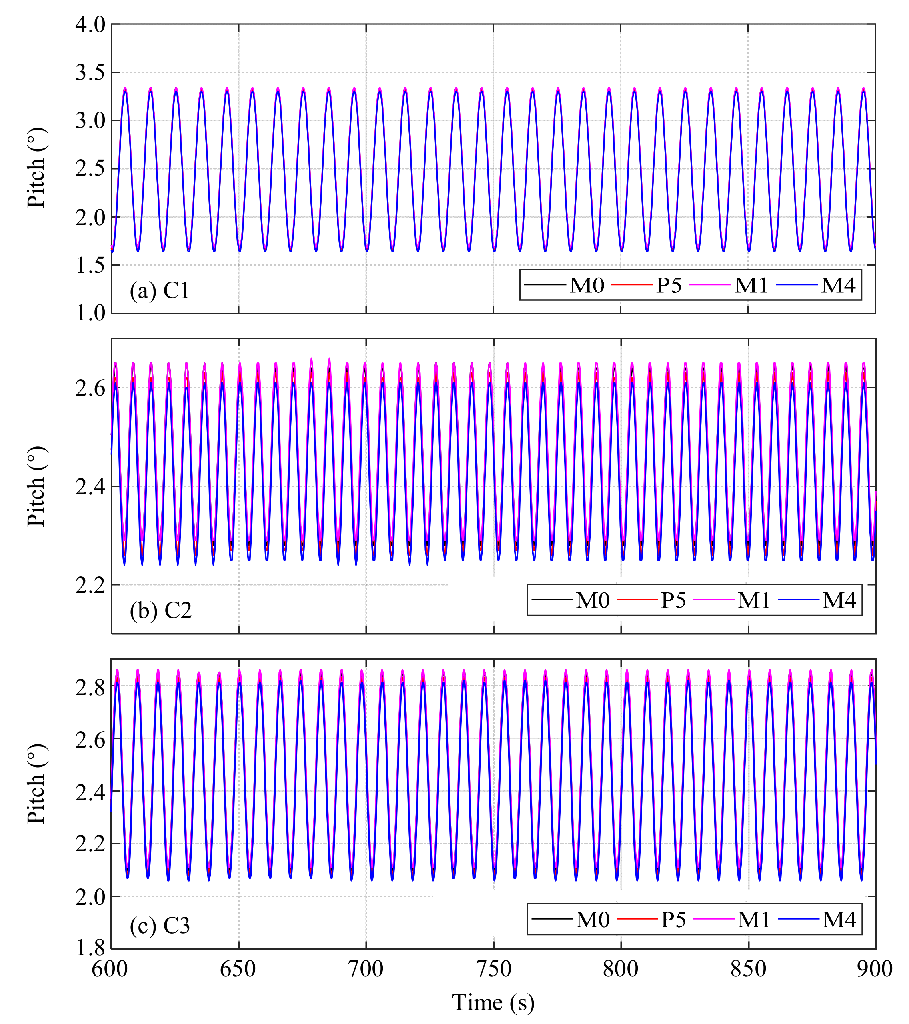
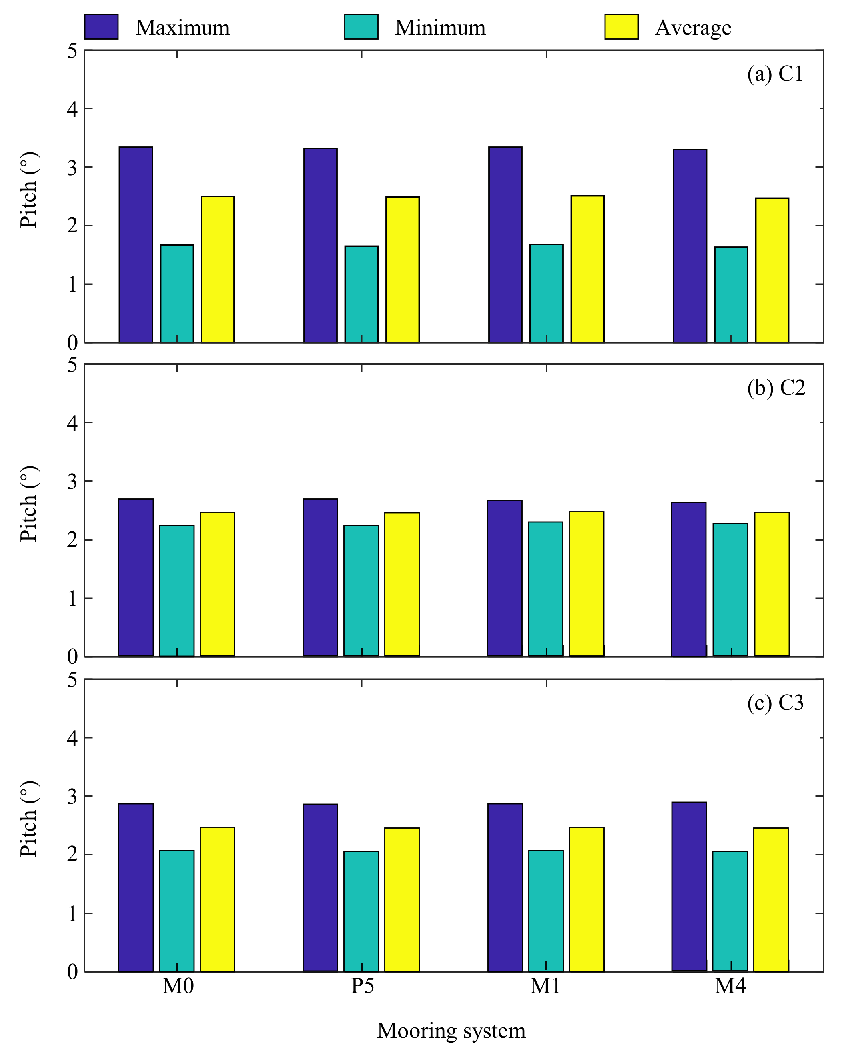
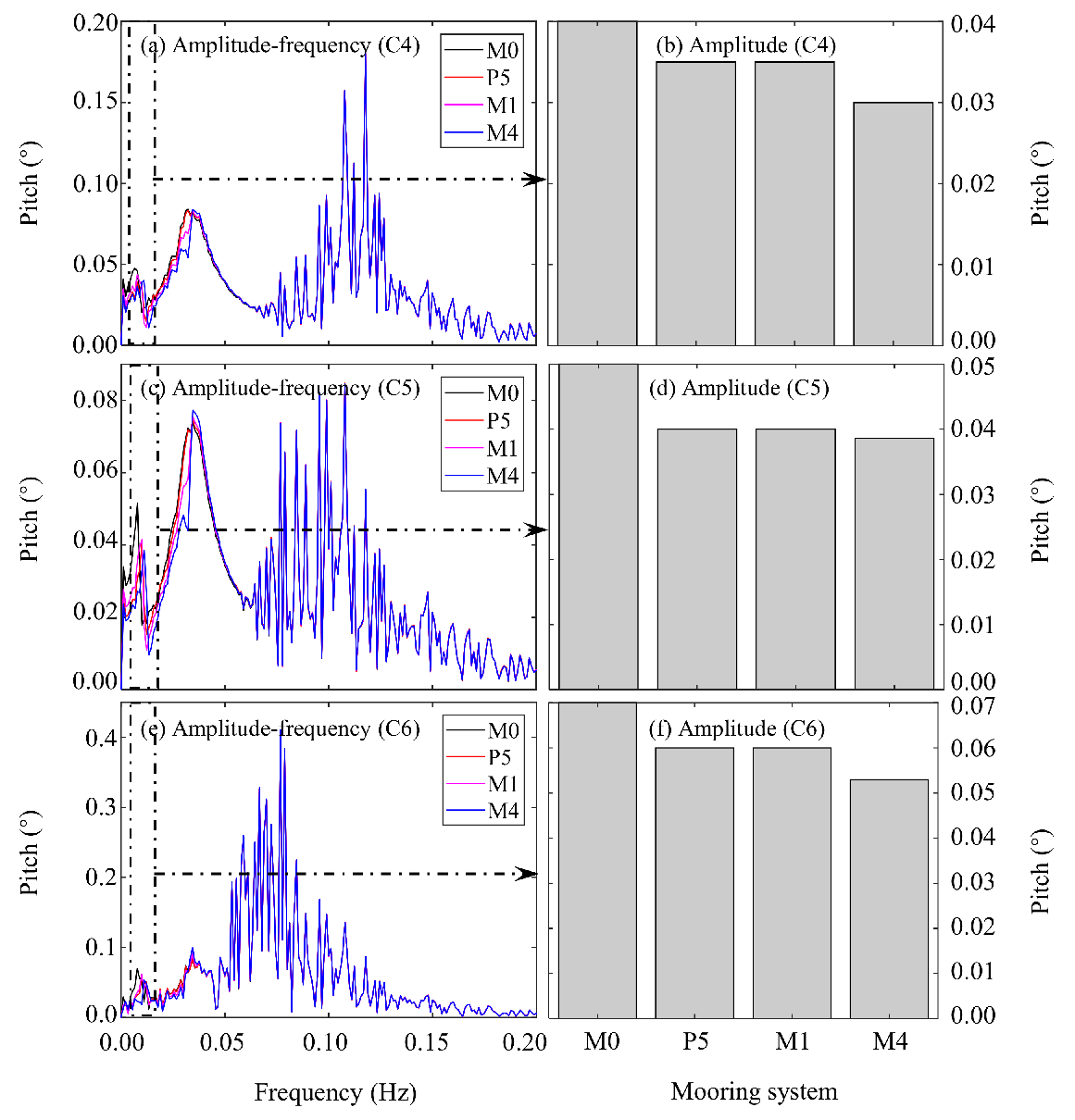
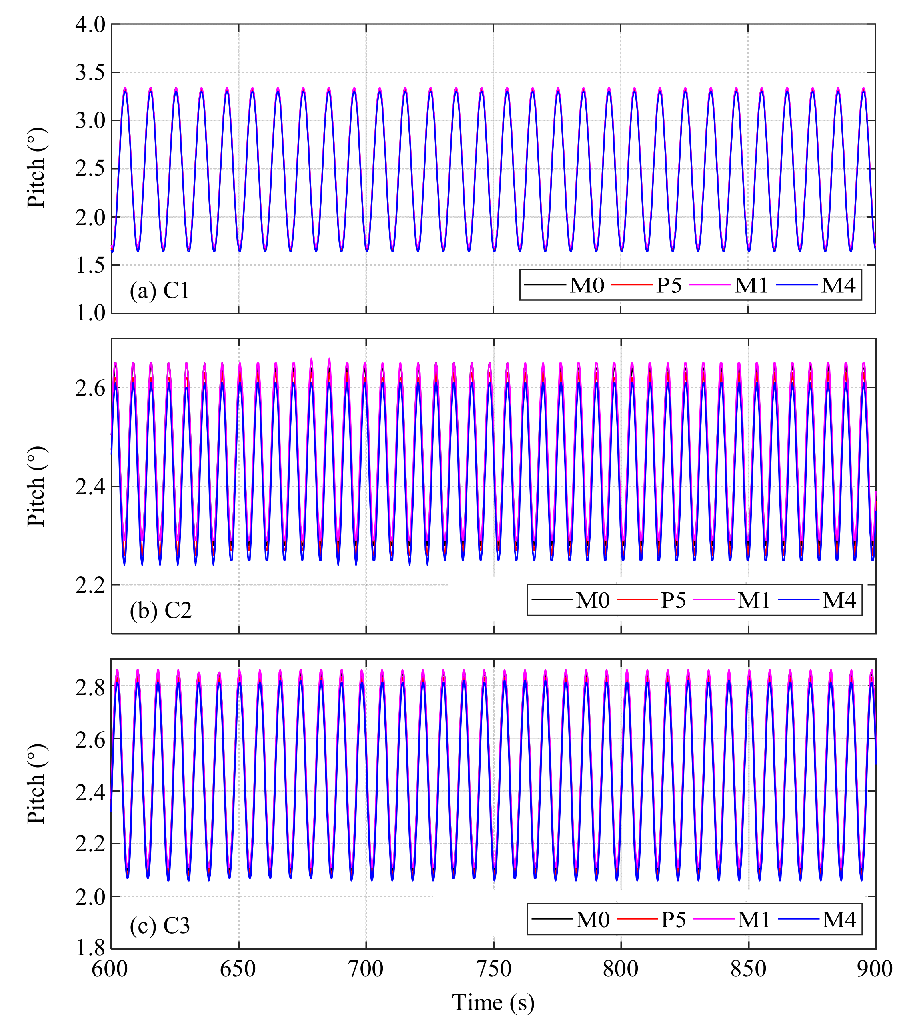
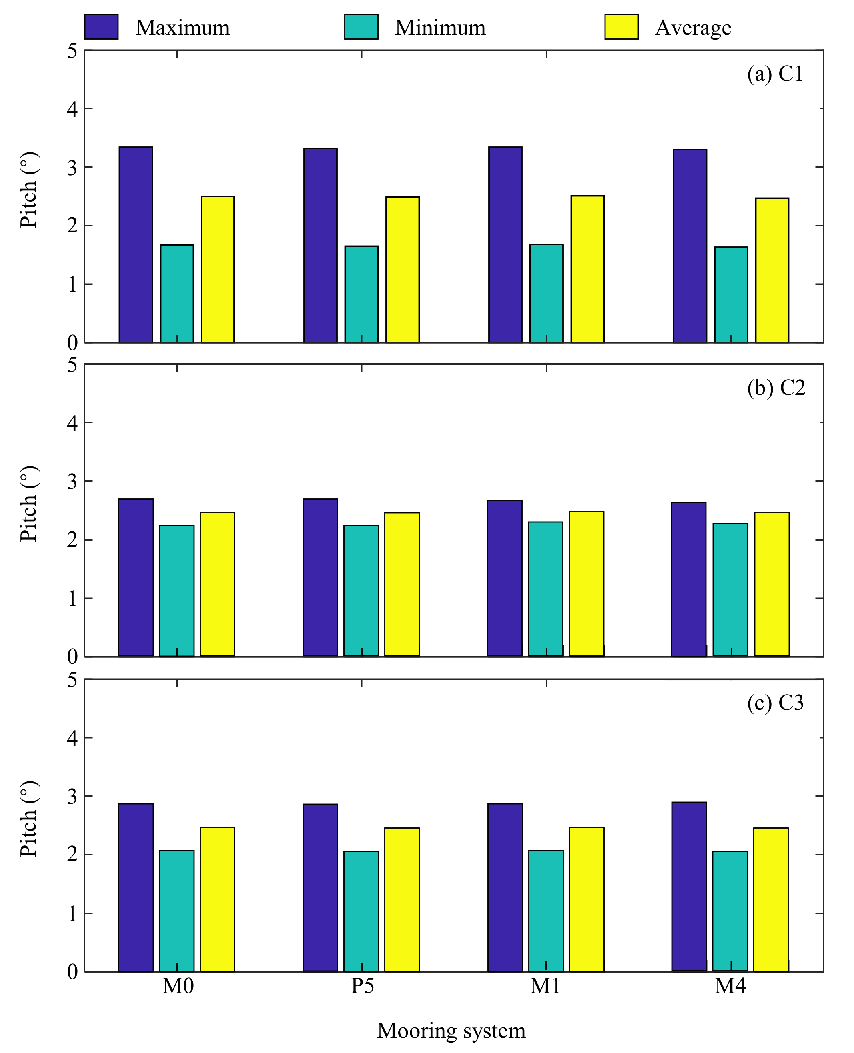
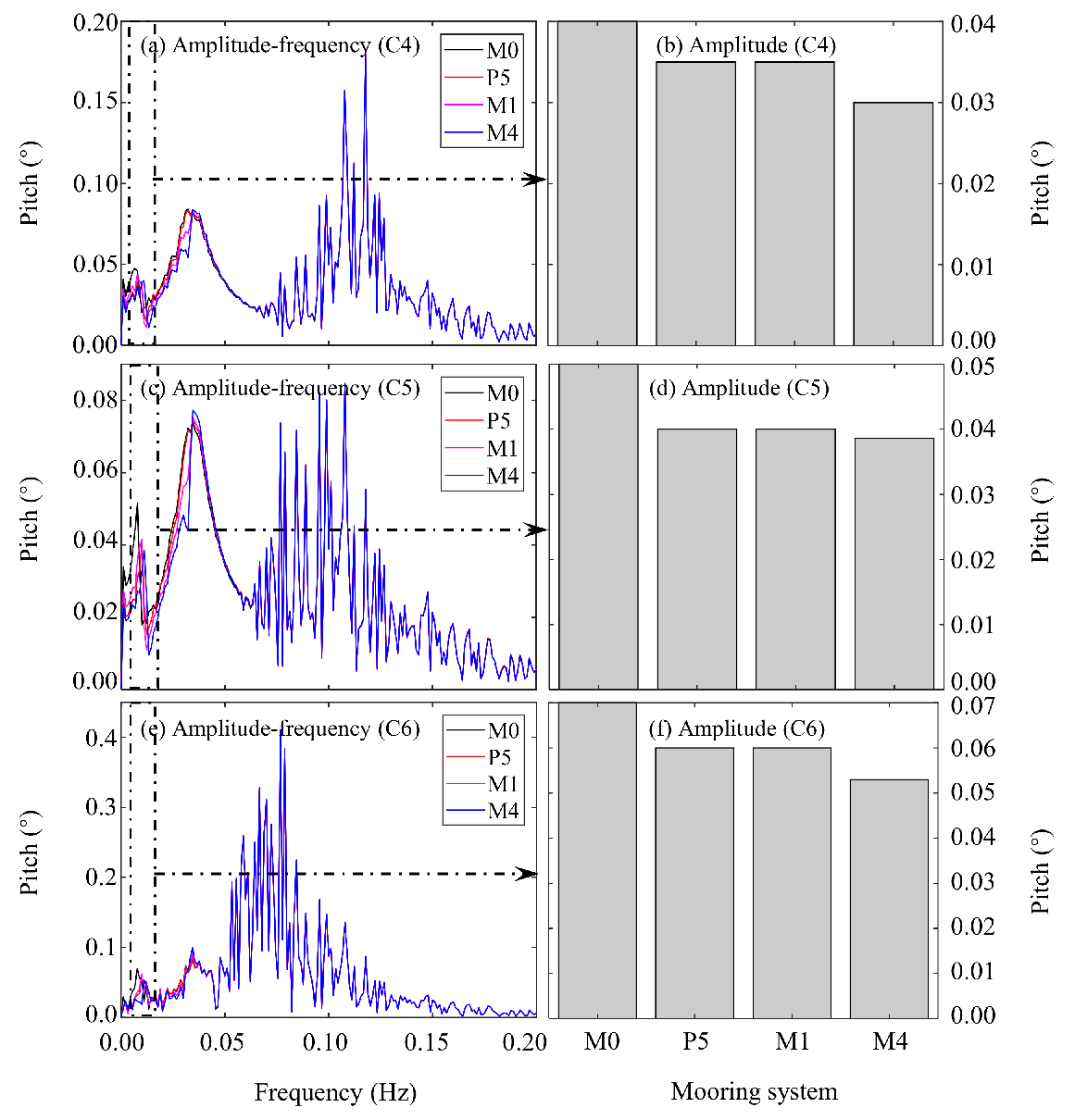
- Optimizing the mooring system properly can effectively control the wind turbine surge and yaw movements; however, it can hardly control the wind turbine pitch movement. A possible explanation is that the gravity center of the entire wind turbine is significantly higher than the fairleads; hence, tuning the mooring system with the remaining fairlead positions lower than the wind turbine gravity center has a negligible effect on its overturning stiffness;
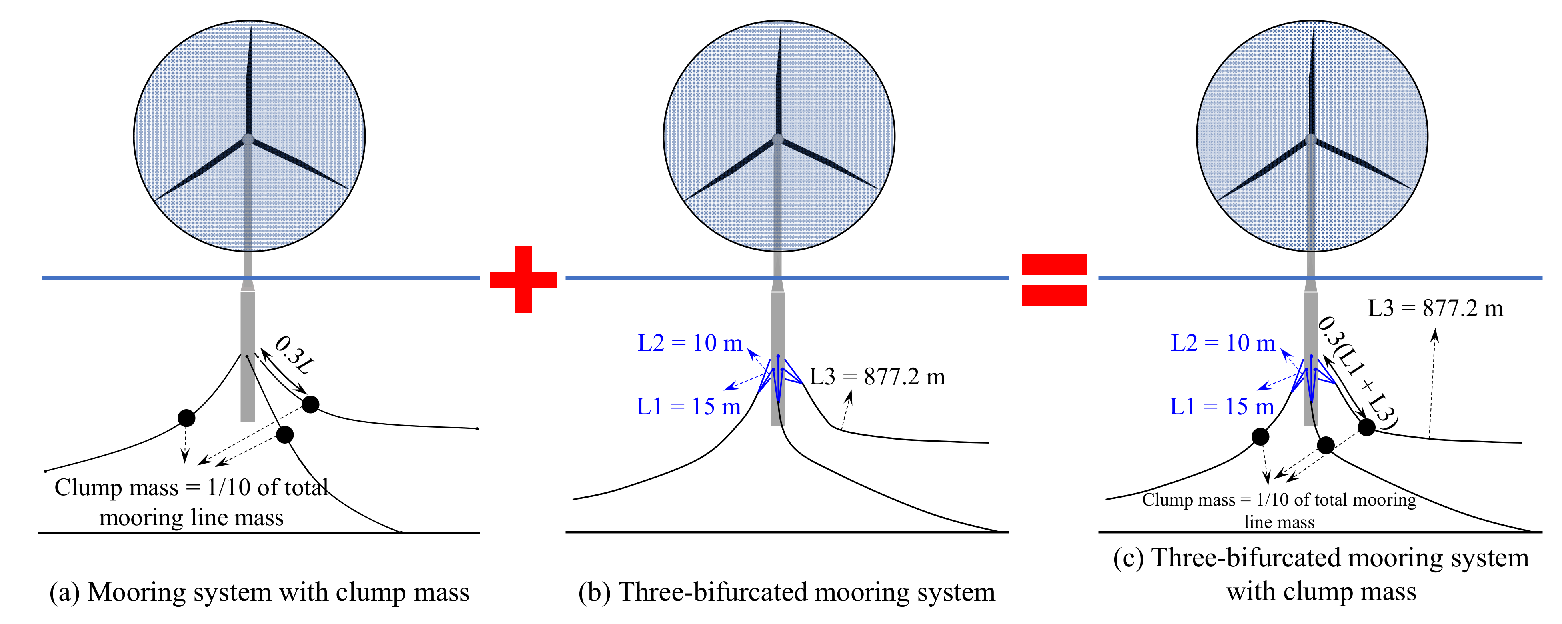
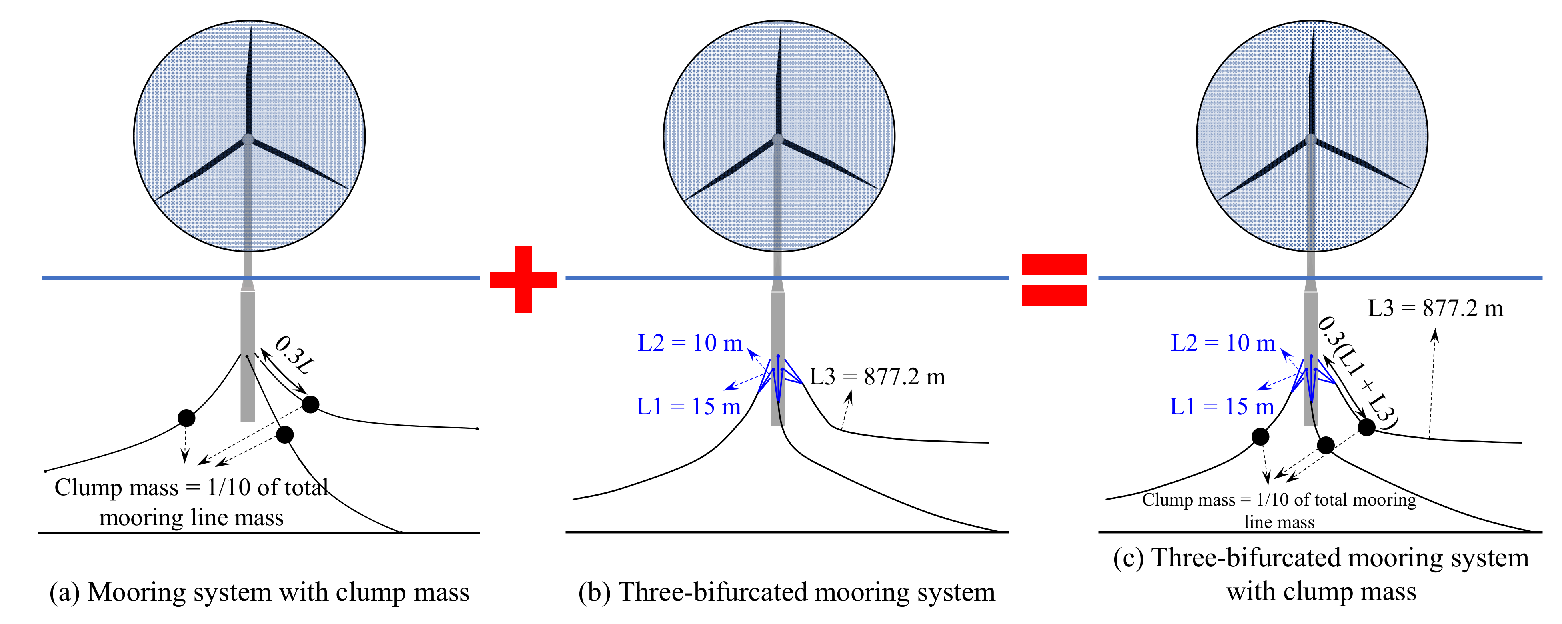
- Through a performance study of the different three-bifurcated mooring system configurations, a recommended configuration is presented. In detail, L1, L2, and L3 should be 0.0166, 0.0111, and 0.9723 times the total mooring line length in the original mooring system. In this study, L1, L2, and L3 are 15 m, 10 m, and 877.2 m, respectively, with the total mooring line length in the original mooring system being 902.2 m;
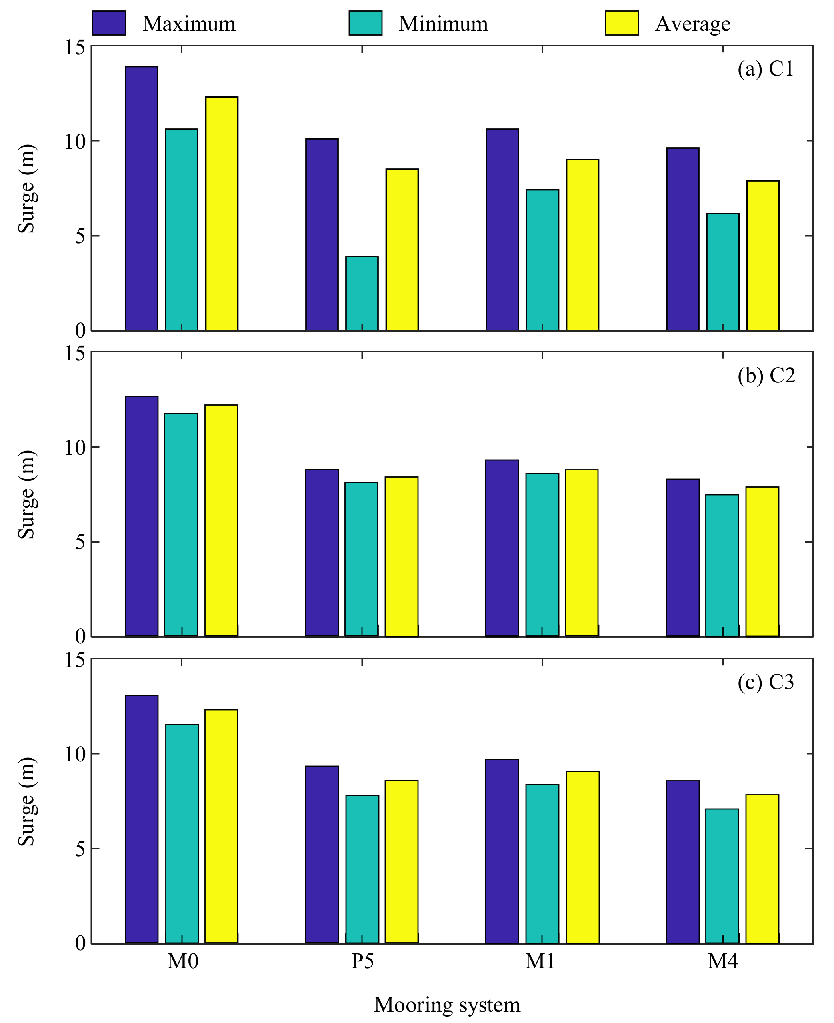
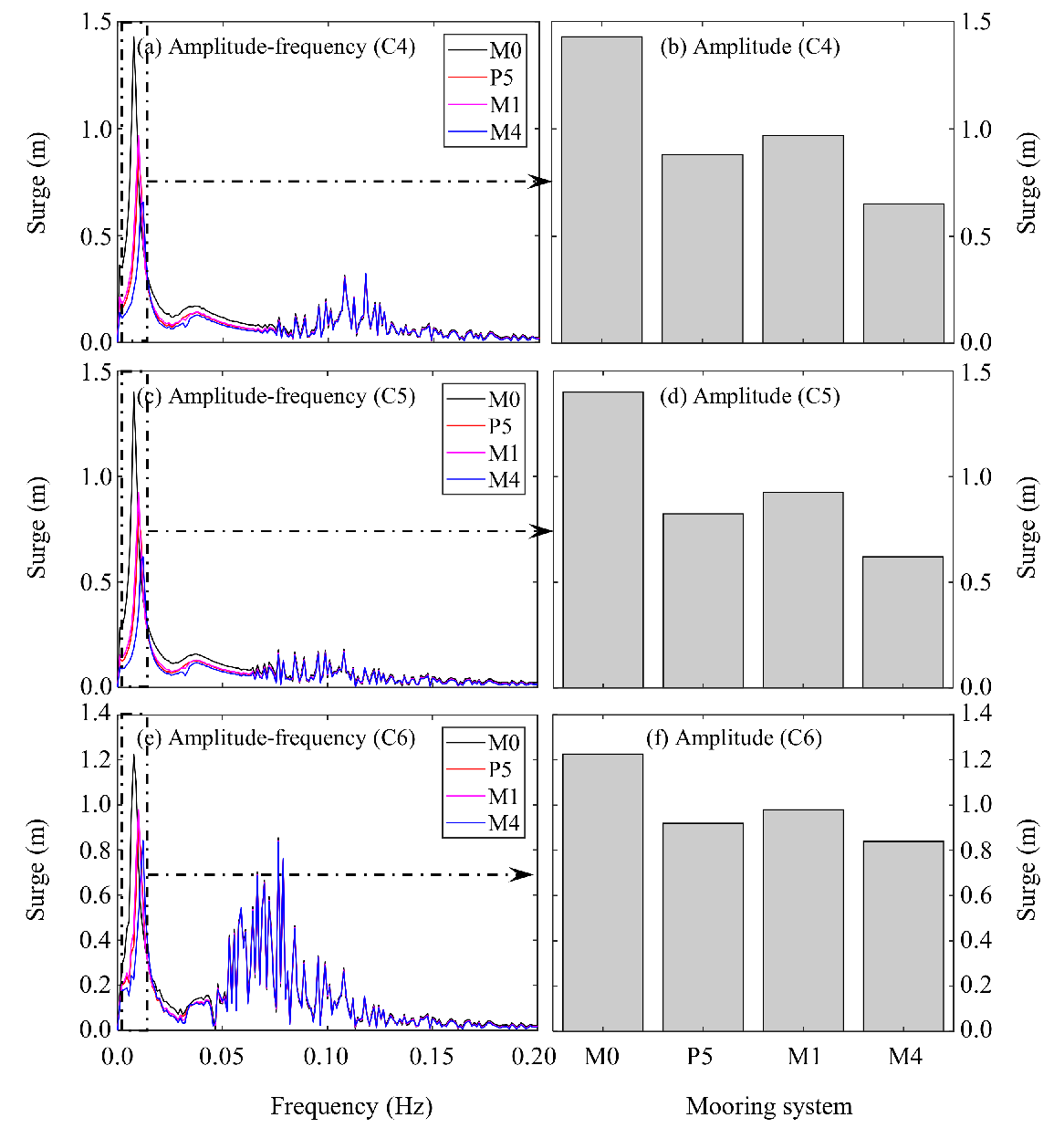
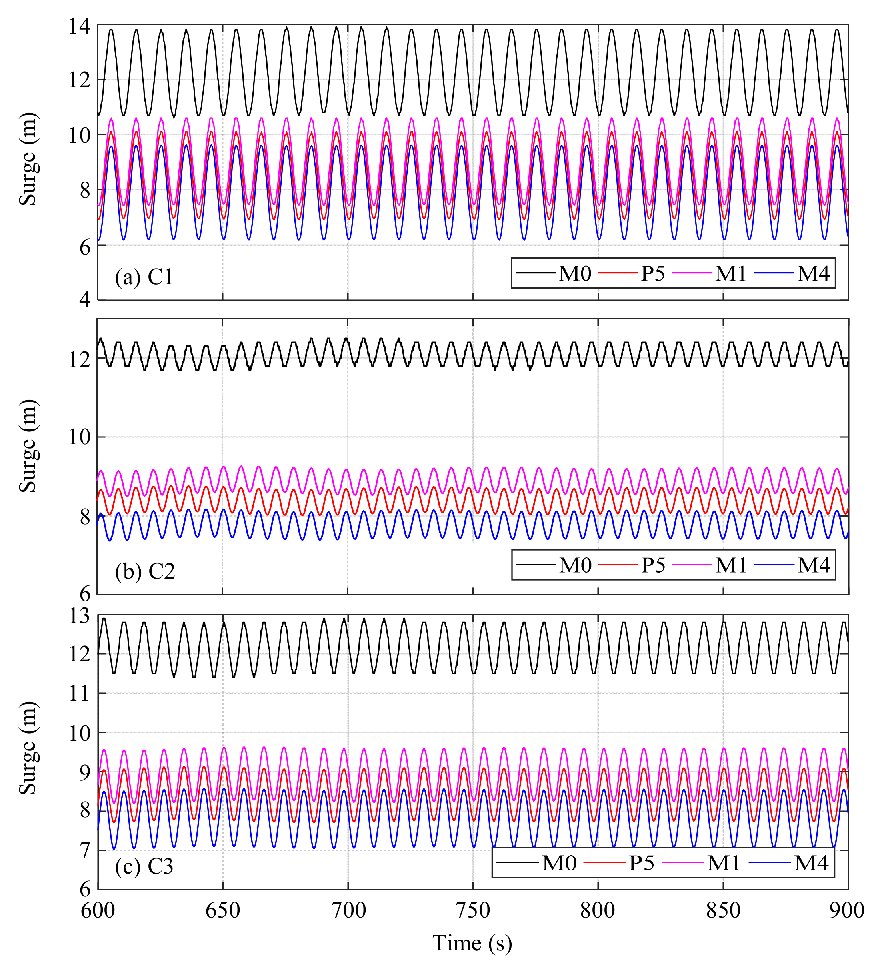
- For the wind turbine surge movement, the three-bifurcated mooring system can, respectively, reduce it 27.88% and 35.66% when under regular and irregular waves compared with the original mooring system; the three-bifurcated mooring system with a clump mass can reduce it 37.15% and 54.5%, respectively, when under regular and irregular waves compared with the original mooring system;
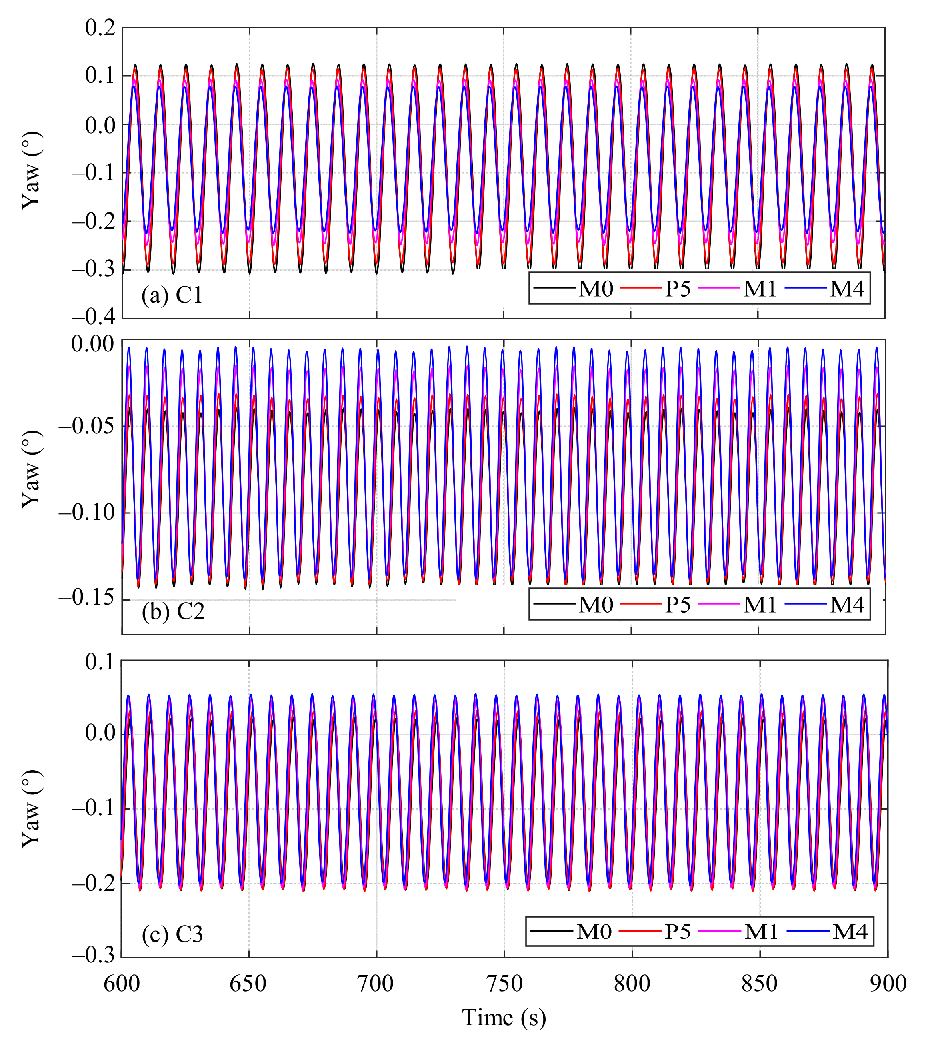
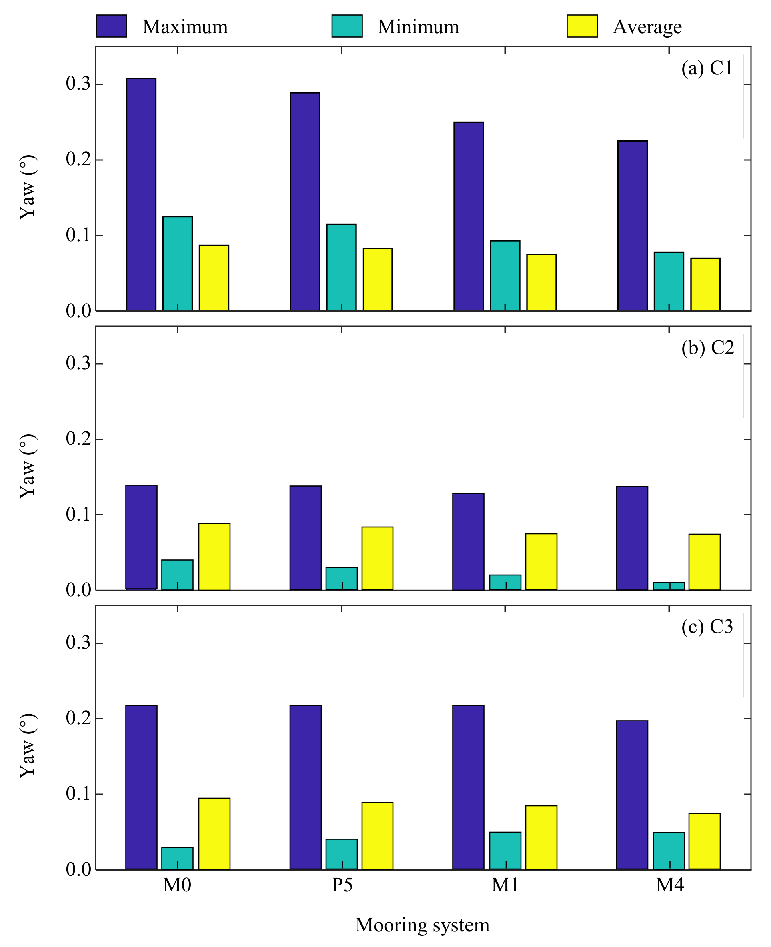
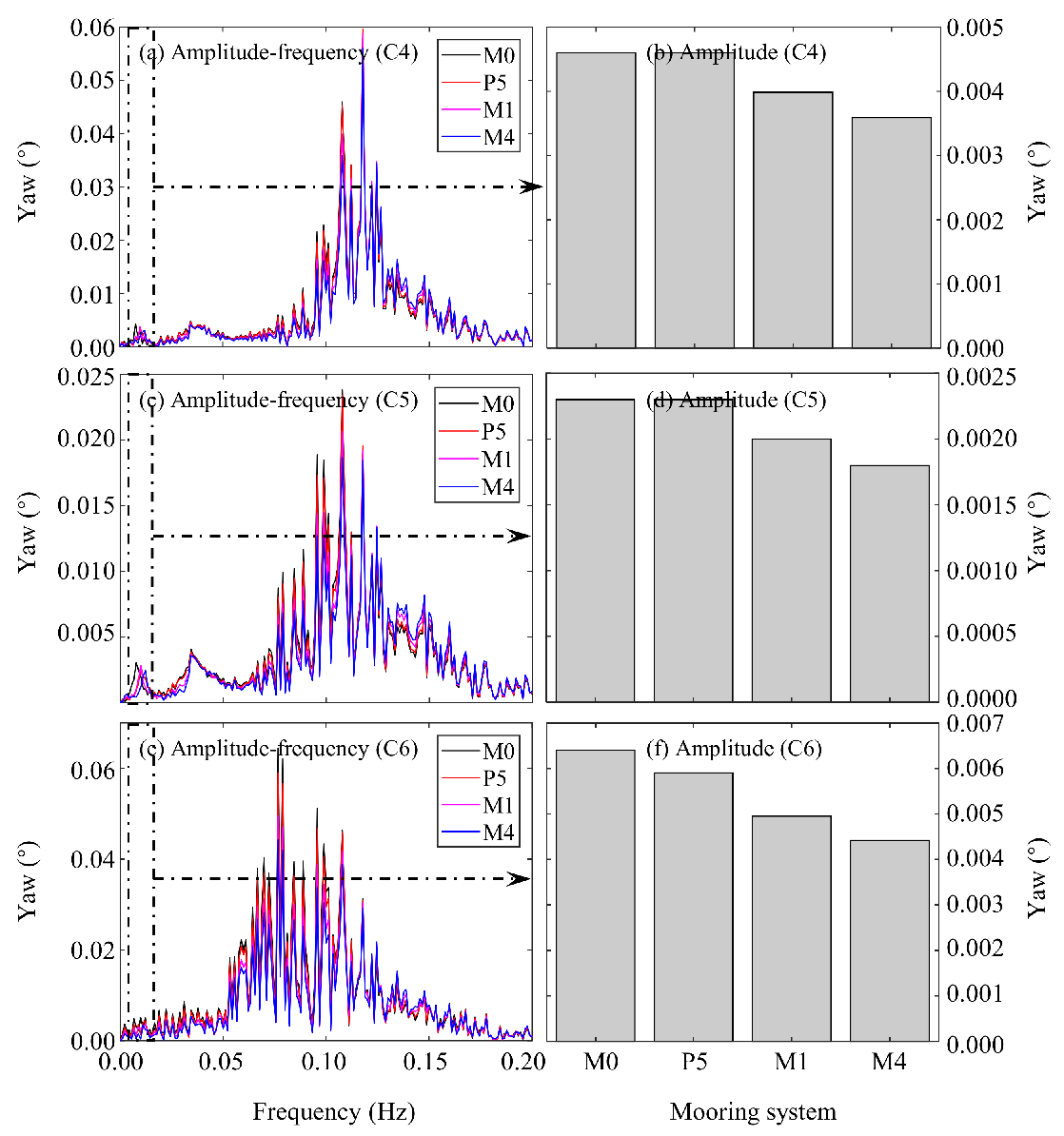
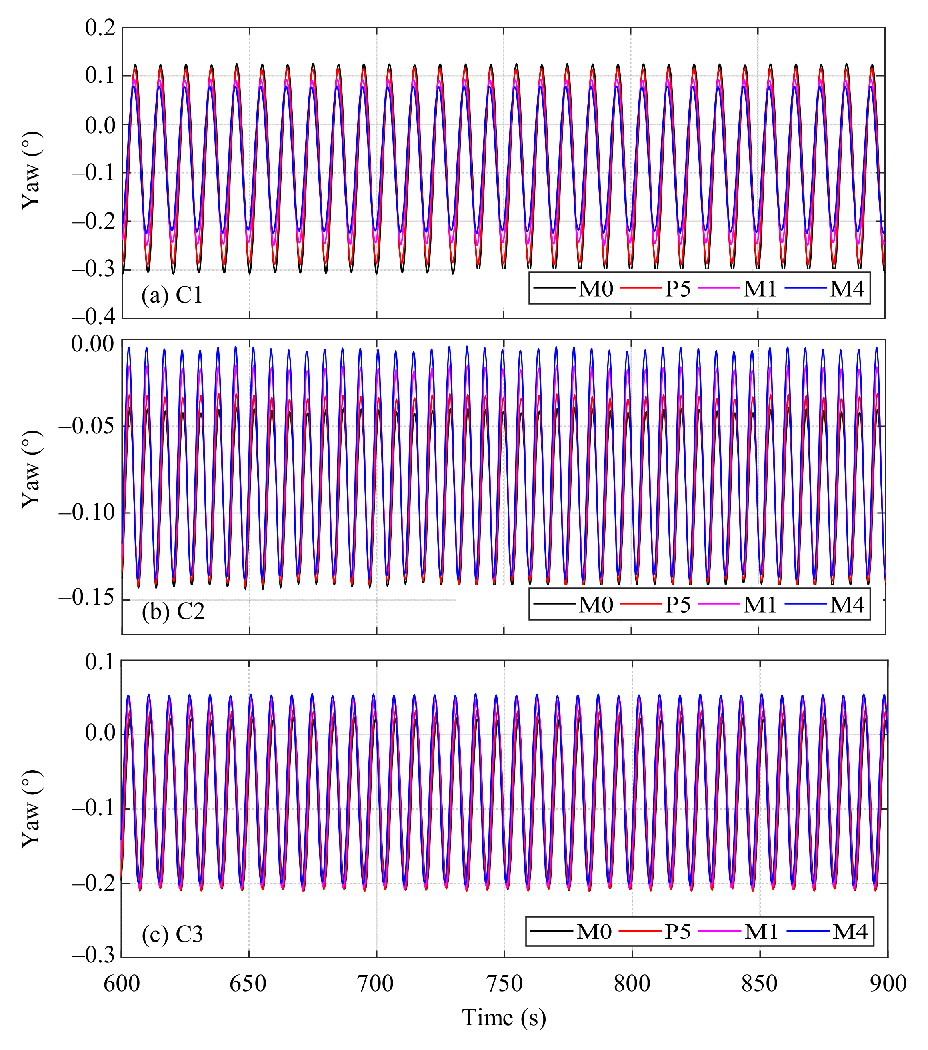
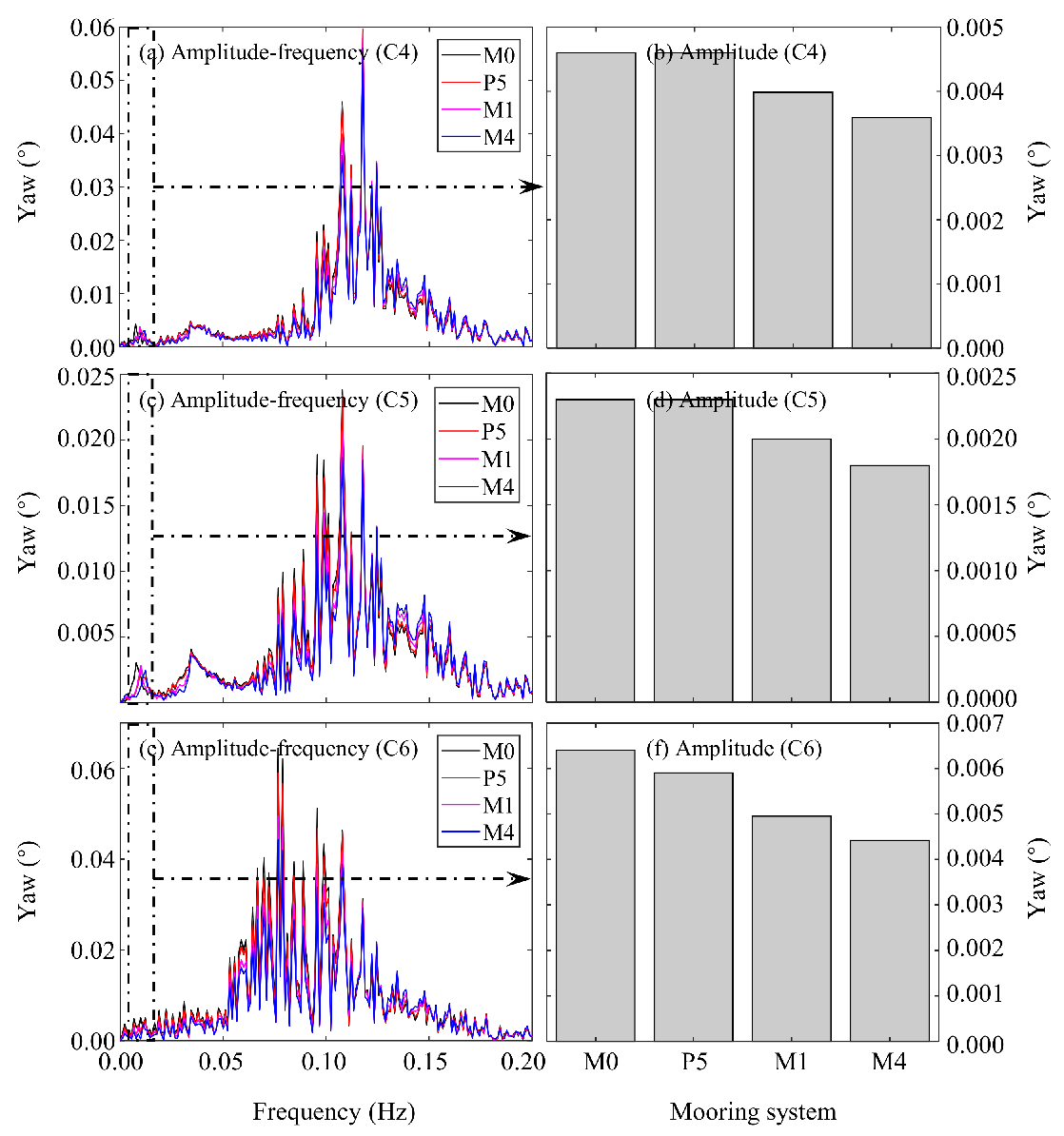
- For the wind turbine yaw movement, the three-bifurcated mooring system can reduce it 22.3% and 33.33%, respectively, when under regular and irregular waves compared with the original mooring system; the three-bifurcated mooring system with a clump mass can reduce it 30.1% and 40%, respectively, when under regular and irregular waves compared with the original mooring system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Liu, Z.; Fan, S.; Wang, Y.; Peng, J. Genetic-algorithm-based layout optimization of an offshore wind farm under real seabed terrain encountering an engineering cost model. Energy Convers. Manag. 2021, 245, 114610. [Google Scholar] [CrossRef]
- Costoya, X.; Castro, M.D.; Carvalho, D.; Feng, Z.; Gomez-Gesteira, M. Climate change impacts on the future offshore wind energy resource in China. Renew. Energ. 2021, 175, 731–747. [Google Scholar] [CrossRef]
- Shah, K.A.; Meng, F.; Li, Y.; Nagamune, R.; Zhou, Y.; Ren, Z.; Jiang, Z. A synthesis of feasible control methods for floating offshore wind turbine system dynamics. Renew. Sust. Energ. Rev. 2021, 151, 111525. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.J.; Zhu, X. Fault-tolerant wind turbine pitch control using adaptive sliding mode estimation. Renew. Energy. 2016, 116, 219–231. [Google Scholar] [CrossRef]
- Yin, X.; Zhang, W.; Jiang, Z.; Pan, L. Adaptive robust integral sliding mode pitch angle control of an electro-hydraulic servo pitch system for wind turbine. Mech. Syst. Signal Process. 2019, 133, 105704. [Google Scholar] [CrossRef]
- Zhang, C.; Gutierrez, S.; Plestan, F.; Leon-Morales, J.D. Adaptive super-twisting control of floating wind turbines with collective blade pitch control. IFAC-PapersOnLine 2019, 52, 117–122. [Google Scholar] [CrossRef]
- Li, J.; Wang, S. Dual multivariable model-free adaptive individual pitch control for load reduction in wind turbines with actuator faults. Renew. Energ. 2021, 174, 293–304. [Google Scholar] [CrossRef]
- Alkmin, M.; Morais, M.; Fabro, A.T. Vibration reduction of wind turbines using tuned liquid column damper using stochastic analysis. J. Phys. Conf. Ser. 2016, 744, 012178. [Google Scholar]
- He, J.; Jin, X.; Xie, S.Y.; Cao, L.; Lin, Y.; Wang, N. Multi-body dynamics modeling and TMD optimization based on the improved AFSA for floating wind turbines. Renew. Energ. 2019, 141, 305–321. [Google Scholar] [CrossRef]
- Yang, J.; He, E.M.; Hu, Y.Q. Dynamic modelling and vibration suppression for an offshore wind turbine with a tuned mass damper in floating platform. Appl. Ocean Res. 2019, 83, 21–29. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Hua, X.; Zhu, H.; Zhu, Z. Optimization of wind turbine TMD under real wind distribution countering wake effects using GPU acceleration and machine learning technologies. J. Wind. Eng. Ind. Aerodyn. 2021, 208, 104436. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, X.; Liu, H.; Li, F.; Luo, M. Large scale wind turbine TMD optimization based on Blade-Nacelle-Tower-Foundation coupled model. Ocean Eng. 2021, 239, 109764. [Google Scholar] [CrossRef]
- Jahangiri, V.; Sun, C.; Kong, F. Study on a 3D pounding pendulum TMD for mitigating bi-directional vibration of offshore wind turbines. Eng. Struct. 2021, 241, 112383. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, X.; Liu, G. Analysis of effect of heave plate on vertical motion performance of truss spar platform. China Pet. Mach. 2017, 45, 46–50. [Google Scholar]
- Chen, D.; Gao, P.; Huang, S.; Fan, K.; Zhuang, N.; Liao, Y. Dynamic response and mooring optimization of Spar-type substructure under combined action of wind, wave, and current. Renew. Sustain. Energy 2017, 9, 063307. [Google Scholar] [CrossRef]
- Zheng, X.; Lei, Y. Stochastic response analysis for a floating offshore wind turbine integrated with a steel fish farming cage. Appl. Sci. 2018, 8, 12–29. [Google Scholar] [CrossRef] [Green Version]
- Ahn, H.J.; Shin, H. Model test and numerical simulation of OC3 spar type floating offshore wind turbine. Int. J. Nav. Arch. Ocean 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Liu, Z.; Tu, Y.; Wang, W.; Qian, G. Numerical analysis of a catenary mooring system attached by clump mass for improving the wave-resistance ability of a Spar buoy-type floating offshore wind turbine. Appl. Sci. 2019, 9, 1075. [Google Scholar] [CrossRef] [Green Version]
- Leimeister, M.; Kolios, A.; Collu, M.; Thomas, P. Design optimization of the OC3 phase IV floating spar-buoy, based on global limit states. Ocean Eng. 2020, 202, 107186. [Google Scholar] [CrossRef]
- Yue, M.; Liu, Q.; Li, C.; Ding, Q.; Cheng, S.; Zhu, H. Effects of heave plate on dynamic response of floating wind turbine Spar platform under the coupling effect of wind and wave. Ocean Eng. 2020, 201, 107103. [Google Scholar] [CrossRef]
- OpenFAST. Available online: https://www.nrel.gov/wind/nwtc/openfast.html (accessed on 28 September 2021).
- Liu, Z.; Wang, Y.; Nyangi, P.; Zhu, Z.; Hua, X. Proposal of a novel GPU-accelerated lifetime optimization method for onshore wind turbine dampers under real wind distribution. Renew. Energ. 2021, 168, 516–543. [Google Scholar] [CrossRef]
- Roux, J.P.L. An extension of the Airy theory for linear waves into shallow water. Coast. Eng. 2008, 55, 295–301. [Google Scholar] [CrossRef]
- Neelamani, S.; Al-Anjari, N. Experimental investigations on wave induced dynamic pressures over slotted vertical barriers in random wave fields. Ocean Eng. 2021, 220, 108482. [Google Scholar] [CrossRef]
- Barreiro, A.; Crespo, A.J.C.; Dominguez, J.M.; Garcia-Feal, O.; Zabala, I.; Gomez-Gesteira, M. Quasi-static mooring solver implemented in SPH. J. Ocean Eng. Mar. Energy 2016, 2, 381–396. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wang, Y. Numerical studies of submerged moored box-type floating breakwaters with different shapes of cross-sections using SPH. Coast. Eng. 2020, 158, 103687. [Google Scholar] [CrossRef]
- Wu, Q.; Yang, J.; Guo, X.; Liu, L. Influence of irregular waves on the dynamic response of a vertical transport system for deep sea mining. Ocean Eng. 2021, 229, 108443. [Google Scholar] [CrossRef]
- Han, W.; Hu, Z.; Xiang, Y. Dynamic performance investigation of a Spar-type floating wind turbine under different sea conditions. China Ocean Eng. 2018, 32, 256–265. [Google Scholar]
- Jonkman, J.; Musial, W. Offshore Code Comparison Collaboration (OC3) for IEA Task 23 Offshore Wind Technology and Development; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Jonkman, J. Definition of the Floating System for Phase IV of OC3; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Liu, Z.; Wang, Y.; Hua, X. Numerical studies and proposal of design equations on cylindrical oscillating wave surge converter under regular waves using SPH. Energy Convers. Manag. 2020, 203, 112. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Wind turbine | Energy output | 5 MW |
| Hub elevation | 90 m | |
| Hub mass | 56,780 kg | |
| Nacelle dimension | (14.2, 2.3, 3.5) m | |
| Nacelle mass | 350,000 kg | |
| Number of blades | 3 | |
| Rotor diameter | 126 m | |
| Rotor mass | 110,000 kg | |
| Rotor type | Upwind | |
| Tower bottom elevation | 10 m | |
| Tower mass | 249,718 kg | |
| Spar-type platform | Platform draft | 120 m |
| Platform mass | 7,466,330 kg | |
| Mooring system | Anchor 1 | (–853.87, 0) m |
| Anchor 2 | (426.935, –739.47) m | |
| Anchor 3 | (426.935, 739.47) m | |
| Fairlead 1 | (–5.2, 0) m | |
| Fairlead 2 | (2.6, –4.5) m | |
| Fairlead 3 | (2.6, 4.5) m | |
| Fairlead draft | 70 m | |
| Mooring line diameter | 0.09 m | |
| Mooring line length | 902 m | |
| Number of mooring lines | 3 | |
| Environment | Water depth | 320 m |
| Case Name | Wave Height (m) | Wave Period (s) | Wind Speed (m s–1) | Wave Type |
|---|---|---|---|---|
| C1 | 6.00 | 10.00 | 8 | Regular |
| C2 | 2.56 | 7.00 | 8 | Regular |
| C3 | 4.00 | 8.00 | 8 | Regular |
| C4 | 6.70 | 8.6 | 8 | Irregular |
| C5 | 3.66 | 9.7 | 8 | Irregular |
| C6 | 9.14 | 13.6 | 8 | Irregular |
| Name | L1 (m) | L2 (m) | L3 (m) |
|---|---|---|---|
| M0 | 0 | 0 | 902.2 |
| M1 | 15 | 10 | 877.2 |
| M2 | 18 | 13 | 871.2 |
| M3 | 20 | 15 | 867.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Yang, Y.; Wang, C.; Tu, Y.; Liu, Z. Proposal of a Novel Mooring System Using Three-Bifurcated Mooring Lines for Spar-Type Off-Shore Wind Turbines. Energies 2021, 14, 8303. https://doi.org/10.3390/en14248303
Liu S, Yang Y, Wang C, Tu Y, Liu Z. Proposal of a Novel Mooring System Using Three-Bifurcated Mooring Lines for Spar-Type Off-Shore Wind Turbines. Energies. 2021; 14(24):8303. https://doi.org/10.3390/en14248303
Chicago/Turabian StyleLiu, Shi, Yi Yang, Chengyuan Wang, Yuangang Tu, and Zhenqing Liu. 2021. "Proposal of a Novel Mooring System Using Three-Bifurcated Mooring Lines for Spar-Type Off-Shore Wind Turbines" Energies 14, no. 24: 8303. https://doi.org/10.3390/en14248303
APA StyleLiu, S., Yang, Y., Wang, C., Tu, Y., & Liu, Z. (2021). Proposal of a Novel Mooring System Using Three-Bifurcated Mooring Lines for Spar-Type Off-Shore Wind Turbines. Energies, 14(24), 8303. https://doi.org/10.3390/en14248303