Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid



Abstract
1. Introduction
2. Induction Generator Wind Energy System
2.1. Induction Generator Model
2.2. Control Scheme
3. State Estimation
3.1. Reference Voltage Model-Based Rotor Flux Estimation
3.2. Kalman Filter Based Rotor Flux Estimation
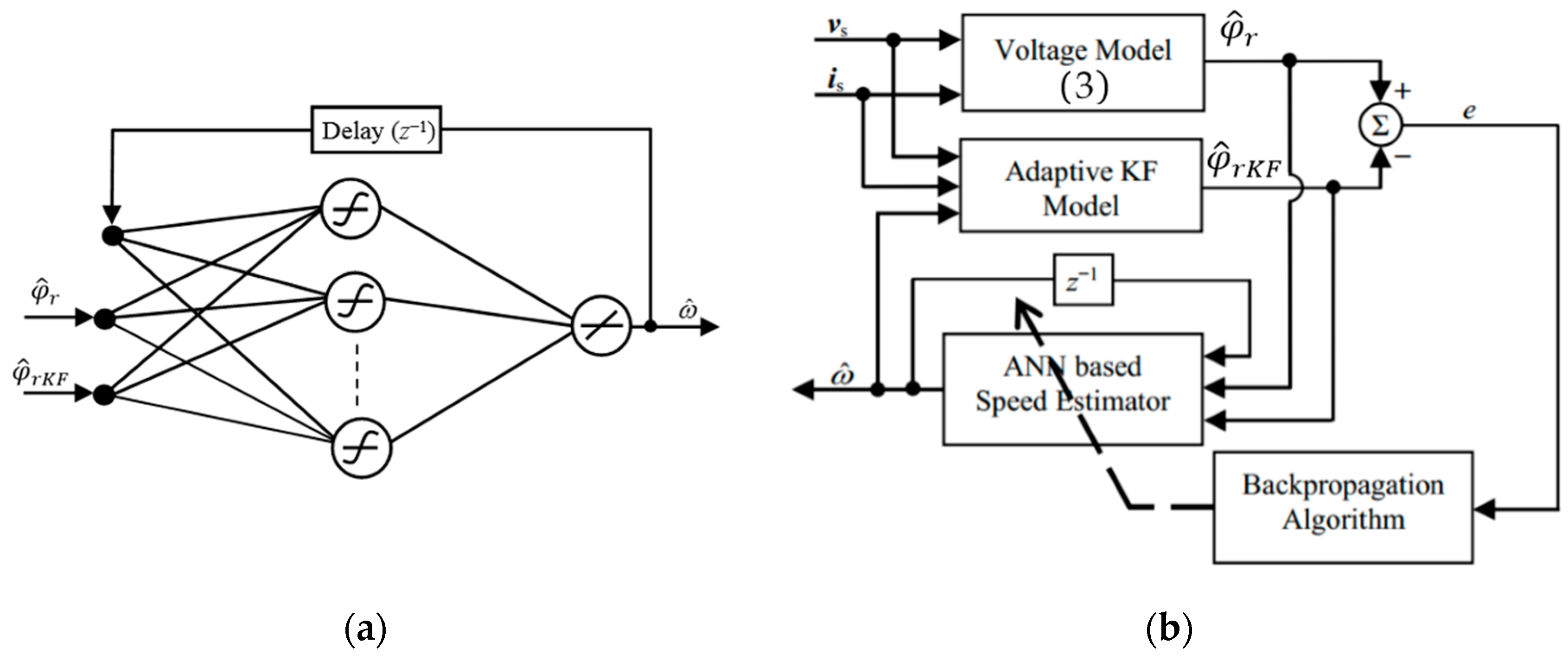
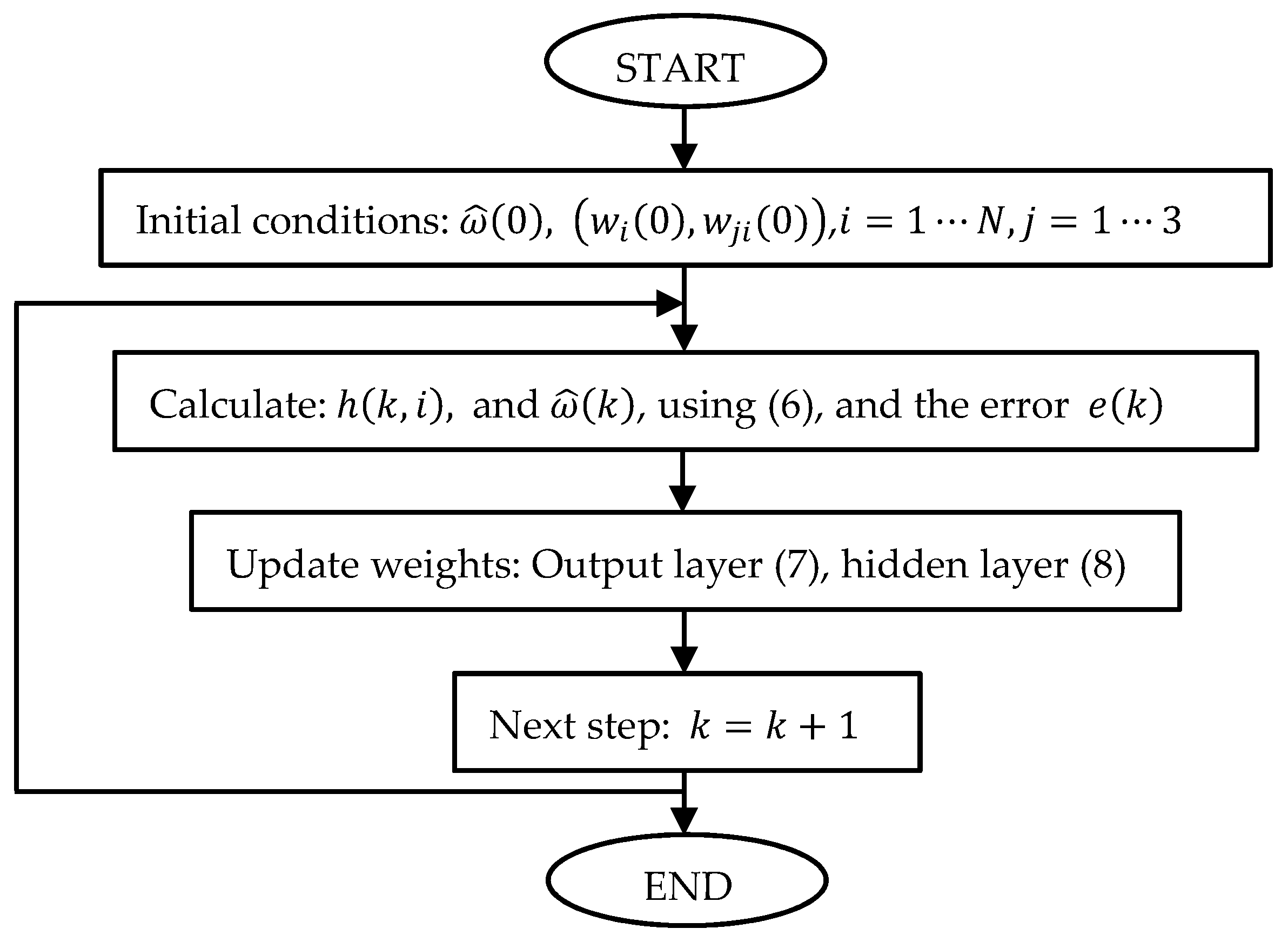
3.3. Artificial Neural Network Speed Estimation
- Two external signals (estimated rotor flux from the reference voltage Model (3) and estimated rotor flux from the KF (5)).
- A feedback from the ANN output with a delay.
4. Load Side Control
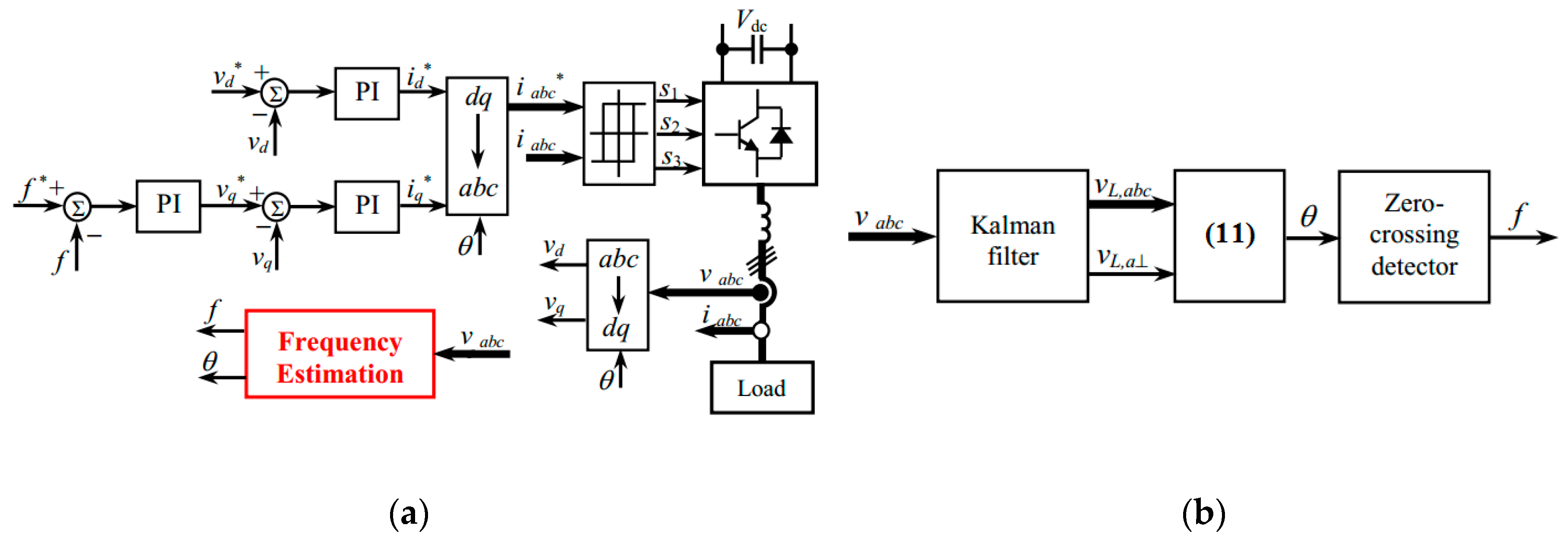
4.1. Control Design
4.2. Frequency Estimation
5. Battery Storage System and Power Management
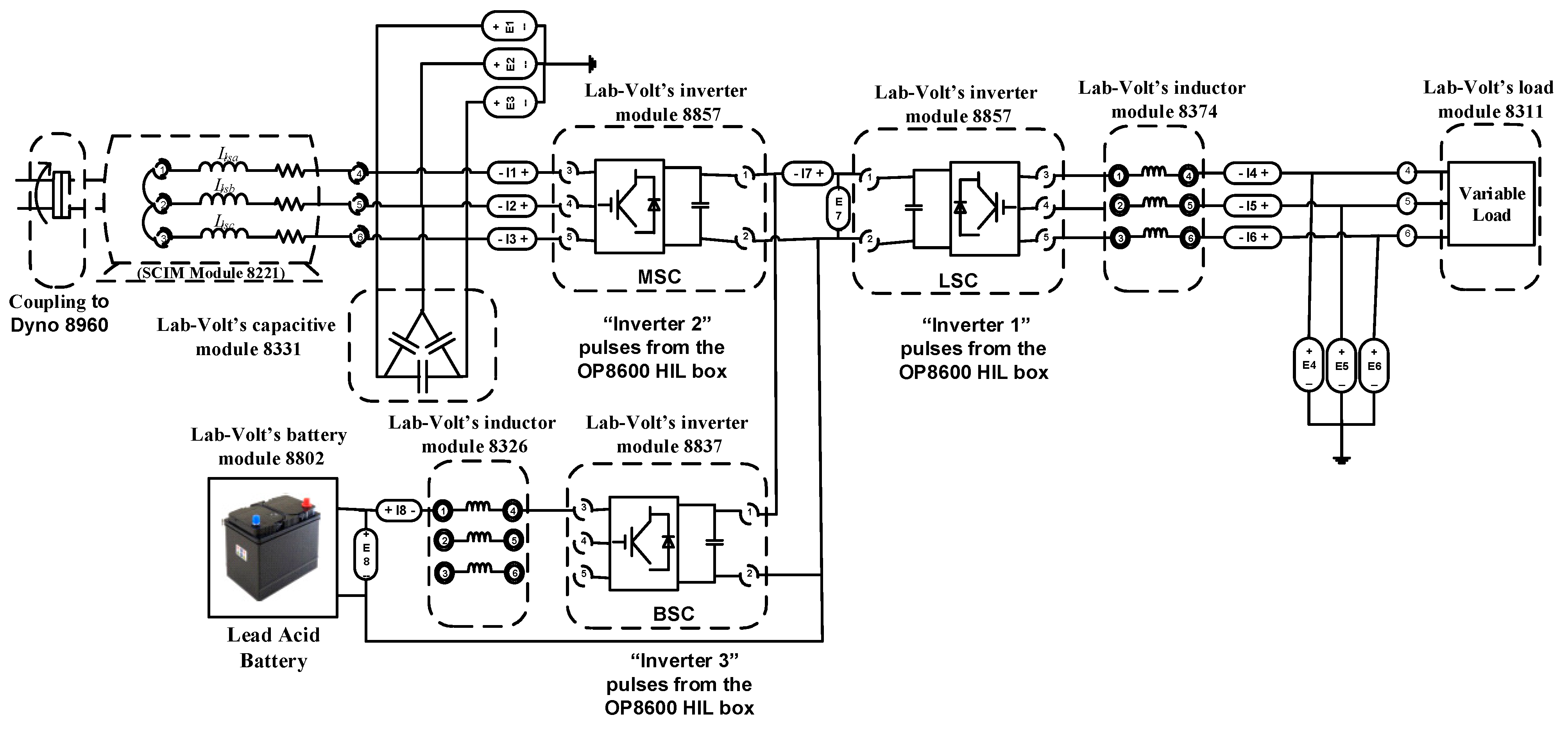
6. Experimental Results
- Three-phase squirrel-cage induction generator.
- Capacitor bank connected to the generator stator terminal for running as a self-started generator.
- Four-quadrant dynamometer, coupled with the induction generator, for wind turbine emulation.
- Back-to-back IGBT converters to connect the generator to the load.
- Bidirectional IGBT DC-DC converter and line inductor to connect the BSS to the DC-link.
- Battery bank based on lead acid batteries.
- Three-phase inductor as the filter to connect the DC-AC converter to the load.
- Variable switching resistor to vary the three-phase AC load.
- Data acquisition interface (OPAL-RT OP8660) for voltage-current measurements.
- Real-time digital simulator (OPAL-RT OP5600) for rapid control prototyping and Hardware-in-the-loop (HIL).
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
- State prediction:
- 2.
- Estimated error covariance:
- 3.
- Kalman filter gain calculation:
- 4.
- State correction:
- 5.
- Error covariance update:
References
- Bansal, R.C. Three-phase self-excited induction generators: An overview. IEEE Trans. Energy Convers. 2005, 20, 292–299. [Google Scholar] [CrossRef]
- Chilipi, R.R.; Singh, B.; Murthy, S.S. Performance of a self-excited induction generator with DSTATCOM-DTC drive-based voltage and frequency controller. IEEE Trans. Energy Convers. 2014, 29, 545–557. [Google Scholar] [CrossRef]
- Senthil Kumar, S.; Kumaresan, N.; Subbiah, M. Analysis and control of capacitor-excited induction generators connected to a micro-grid through power electronic converters. IET Gener. Transm. Dis. 2015, 9, 911–920. [Google Scholar] [CrossRef]
- Gao, S.; Bhuvaneswari, G.; Murthy, S.S.; Kalla, U. Efficient voltage regulation scheme for three-phase self-excited induction generator feeding single-phase load in remote locations. IET Renew. Power Gen. 2014, 8, 100–108. [Google Scholar] [CrossRef]
- Singh, B.; Murthy, S.S.; Reddy, R.S.; Arora, P. Implementation of modified current synchronous detection method for voltage control of self-excited induction generator. IET Power Electron. 2015, 8, 1146–1155. [Google Scholar] [CrossRef]
- Scherer, L.G.; Tambara, R.V.; De Camargo, R.F. Voltage and frequency regulation of standalone self-excited induction generator for micro-hydro power generation using discrete-time adaptive control. IET Renew. Power Gen. 2016, 10, 531–540. [Google Scholar] [CrossRef]
- Urtasun, A.; Barrios, E.L.; Sanchis, P.; Marroyo Palomo, L. Frequency-based energy-management strategy for stand-alone systems with distributed battery storage. IEEE Trans. Power Electron. 2015, 30, 4794–4808. [Google Scholar] [CrossRef]
- Korlinchak, C.; Comanescu, M. Sensorless field orientation of an induction motor drive using a time-varying observer. IET Electr. Power Appl. 2012, 6, 353–361. [Google Scholar] [CrossRef]
- Merabet, A.; Rajasekaran, V.; McMullin, A.; Ibrahim, H.; Beguenane, R.; Thongam, J.S. Nonlinear model predictive controller with state observer for speed sensorless induction generator–wind turbine systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2013, 227, 198–213. [Google Scholar] [CrossRef]
- Zhao, K.; You, X. Speed estimation of induction motor using modified voltage model flux estimation. In Proceedings of the IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 1979–1982. [Google Scholar]
- Bensiali, N.; Etien, E.; Benalia, N. Convergence analysis of back-EMF MRAS observers used in sensorless control of induction motor drives. Math. Comput. Simul. 2015, 115, 12–23. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Dybkowski, M. Stator-current-based MRAS estimator for a wide range speed-sensorless induction-motor drive. IEEE Trans. Ind. Electron. 2010, 57, 1296–1308. [Google Scholar] [CrossRef]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. Stator current model reference adaptive systems speed estimator for regenerating-mode low-speed operation of sensorless induction motor drives. IET Electr. Power Appl. 2013, 7, 597–606. [Google Scholar] [CrossRef]
- Marcetic, D.P.; Krcmar, I.R.; Gecic, M.A.; Matić, P.R. Discrete rotor flux and speed estimators for high-speed shaft-sensorless IM drives. IEEE Trans. Ind. Electron. 2014, 61, 3099–3108. [Google Scholar] [CrossRef]
- Merabet, A.; Tanvir, A.A.; Beddek, K. Torque and state estimation for real-time implementation of multivariable control in sensorless induction motor drives. IET Electr. Power Appl. 2017, 11, 653–663. [Google Scholar] [CrossRef]
- Barut, M. Bi Input-extended Kalman filter based estimation technique for speed-sensorless control of induction motors. Energy Convers. Manag. 2010, 51, 2032–2040. [Google Scholar] [CrossRef]
- Mazaheri, A.; Radan, A. Performance evaluation of nonlinear Kalman filtering techniques in low speed brushless DC motors driven sensor-less positioning systems. Control Eng. Pract. 2017, 60, 148–156. [Google Scholar] [CrossRef]
- Alonge, F.; D’Ippolito, F.; Sferlazza, A. Sensorless control of induction-motor drive based on robust Kalman filter and adaptive speed estimation. IEEE Trans. Ind. Electron. 2014, 61, 1444–1453. [Google Scholar] [CrossRef]
- Habibullah, M.; Lu, D.D.-C. A speed-sensorless FS-PTC of induction motors using extended Kalman filters. IEEE Trans. Ind. Electron. 2015, 62, 6765–6778. [Google Scholar] [CrossRef]
- Farasat, M.; Trzynadlowski, A.M.; Fadali, M.S. Efficiency improved sensorless control scheme for electric vehicle induction motors. IET Electr. Syst. Transp. 2014, 4, 122–131. [Google Scholar] [CrossRef]
- Zerdali, E.; Barut, M. The comparisons of optimized extended Kalman filters for speed-sensorless control of induction motors. IEEE Trans. Ind. Electron. 2017, 64, 4340–4351. [Google Scholar] [CrossRef]
- Cirrincione, M.; Accetta, A.; Pucci, M.; Vitale, G. MRAS speed observer for high-performance linear induction motor drives based on linear neural networks. IEEE Trans. Power Electron. 2013, 28, 123–134. [Google Scholar] [CrossRef]
- Al-Ghossini, H.; Locment, F.; Sechilariu, M.; Gagneur, L.; Forgez, C. Adaptive-tuning of extended Kalman filter used for small scale wind generator control. Renew. Energy 2016, 85, 1237–1245. [Google Scholar] [CrossRef]
- Ammar, A.; Kheldoun, A.; Metidji, B.; Ameid, T.; Azzoug, Y. Feedback linearization based sensorless direct torque control using stator flux MRAS-sliding mode observer for induction motor drive. ISA Trans. 2020, 98, 382–392. [Google Scholar] [CrossRef] [PubMed]
- Korzonek, M.; Tarchala, G.; Orlowska-Kowalska, T. A review on MRAS-type speed estimators for reliable and efficient induction motor drives. ISA Trans. 2019, 93, 1–13. [Google Scholar] [CrossRef]
- Pal, A.; Das, S.; Chattopadhyay, A.K. An improved rotor flux space vector based MRAS for field oriented control of induction motor drives. IEEE Trans. Power Electron. 2018, 33, 5131–5141. [Google Scholar] [CrossRef]
- Zerdali, E.; Mengüç, E.C. Novel complex-valued stator current-based MRAS estimators with different adaptation mechanisms. IEEE Trans. Instrum. Meas. 2019, 68, 3793–3795. [Google Scholar] [CrossRef]
- Velo, R.; López, P.; Maseda, F. Wind speed estimation using multilayer perceptron. Energy Convers. Manag. 2014, 81, 1–9. [Google Scholar] [CrossRef]
- Jaramillo-Lopeza, F.; Kenne, G.; Lamnabhi-Lagarrigue, F. A novel online training neural network-based algorithm for wind speed estimation and adaptive control of PMSG wind turbine system for maximum power extraction. Renew. Energy 2016, 86, 38–48. [Google Scholar] [CrossRef]
- Merabet, A.; Tanvir, A.A.; Beddek, K. Speed control of sensorless induction generator by artificial neural network in wind energy conversion system. IET Renew. Power Gen. 2016, 10, 1597–1606. [Google Scholar] [CrossRef]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. Sensorless control of induction motor drives at very low and zero speeds using neural network flux observers. IEEE Trans. Ind. Electron. 2009, 56, 3029–3039. [Google Scholar] [CrossRef]
- Maiti, S.; Verma, V.; Chakraborty, C.; Hori, Y. An adaptive speed sensorless induction motor drive with artificial neural network for stability enhancement. IEEE Trans. Ind. Inform. 2012, 8, 757–766. [Google Scholar] [CrossRef]
- Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. A new single-phase PLL structure based on second order generalized integrator. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Merabet, A.; Ahmed, K.T.; Ibrahim, H.; Beguenane, R.; Ghias, A.M. Energy management and control system for laboratory scale microgrid based wind-PV-battery. IEEE Trans. Sustain. Energy 2017, 8, 145–154. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, D.; Zheng, H. Signal frequency estimation based on Kalman filtering method. In Proceedings of the 8th International Conference on Computer and Automation Engineering, Melbourne, Australia, 3–4 March 2016; pp. 1–6. [Google Scholar]
- Cardoso, R.; Camargo, R.F.D.; Pinheiro, H.; Gründling, H. Kalman filter based synchronisation methods. IET Gener. Transm. Dis. 2008, 2, 542–555. [Google Scholar] [CrossRef]
- Marafão, F.P.; Colón, D.; De Padua, M.S.; Deckmann, S.M. Kalman filter on power electronics and power systems applications. In Kalman Filter: Recent Advances and Applications; Moreno, V.M., Pigazo, A., Eds.; IntechOpen: London, UK, 2009; pp. 397–420. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Characteristics | |
|---|---|---|
| Dynamometer | Four-quadrant, 0−3 Nm, 0−2500 rpm, 350 W | |
| SCIG | Four-pole, 3 phases, 60 Hz, 208 V, 1670 rpm, 175 W | |
| Battery | Lead acid, 48 V, 9 Ah, max charge current 2.7 | |
| Characteristics | Values |
|---|---|
| IGBT power converters | |
| DC-link voltage | 220 V |
| IGBT peak current | 12 A |
| Switching control (voltage, frequency) | 0/5 V, 0−20 kHz |
| Excitation capacitor bank | |
| Power, voltage | 252 VAR, 120 V |
| Capacitance | 8.8 μF |
| Resistance | 300 Ω |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanvir, A.A.; Merabet, A. Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid. Energies 2020, 13, 1743. https://doi.org/10.3390/en13071743
Tanvir AA, Merabet A. Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid. Energies. 2020; 13(7):1743. https://doi.org/10.3390/en13071743
Chicago/Turabian StyleTanvir, Aman A., and Adel Merabet. 2020. "Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid" Energies 13, no. 7: 1743. https://doi.org/10.3390/en13071743
APA StyleTanvir, A. A., & Merabet, A. (2020). Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid. Energies, 13(7), 1743. https://doi.org/10.3390/en13071743