A Control Strategy for Smooth Power Tracking of a Grid-Connected Virtual Synchronous Generator Based on Linear Active Disturbance Rejection Control

Abstract
:1. Introduction
- The proposed control strategy based on LADRC can have VSG output active power to the grid as demanded without overshoot in time compared with the conventional VSG.
- This control strategy enables VSG to transmit power to the grid stably in accordance with the power reference without PLL and it is insensitive to the gird frequency fluctuation.
- The unmodeled parts can be seen as constituent parts of lumped disturbance and the improved VSG has strong robustness to the parameter perturbation and model-plant mismatch.
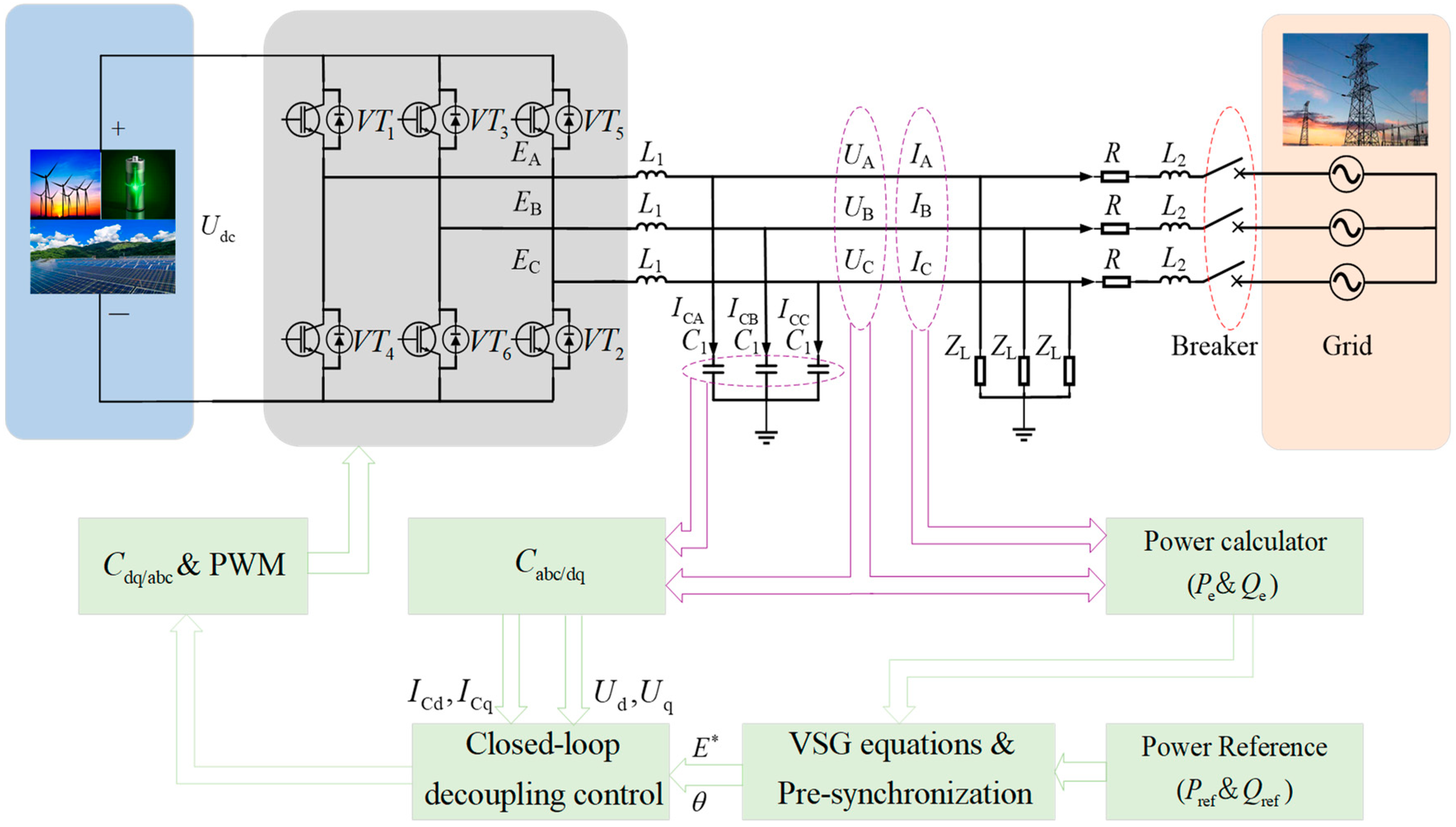
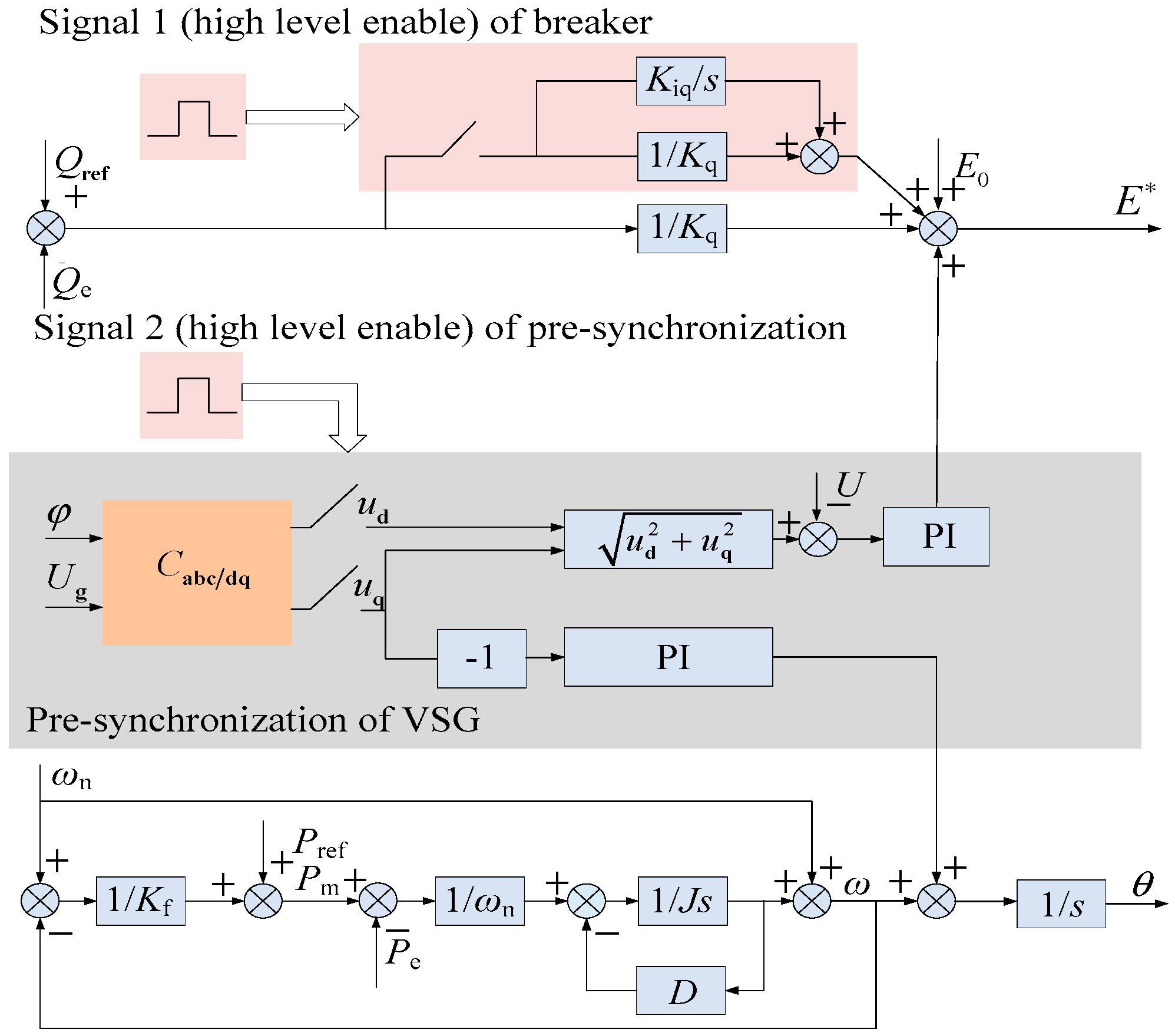
2. Basic Principles of VSG
3. Control Strategies for VSG
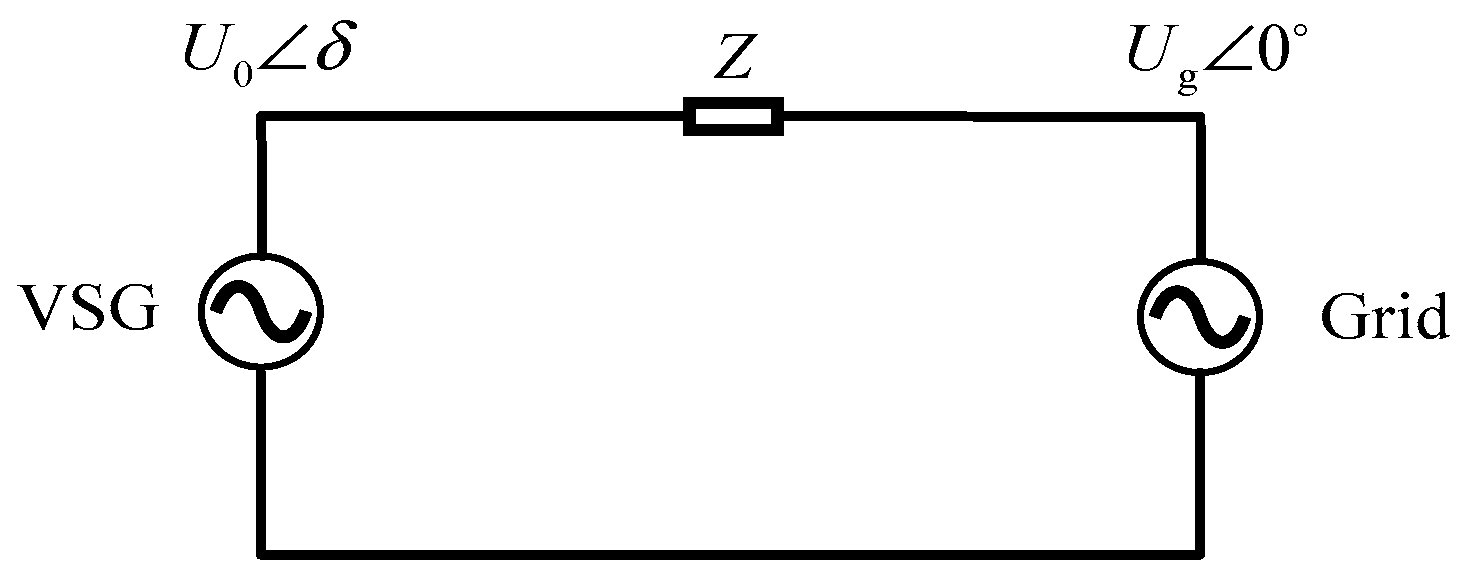
3.1. Performance Analysis of Conventional Grid-Connected VSG
3.2. Control Strategy for Power of Grid-Connected VSG Based on LADRC
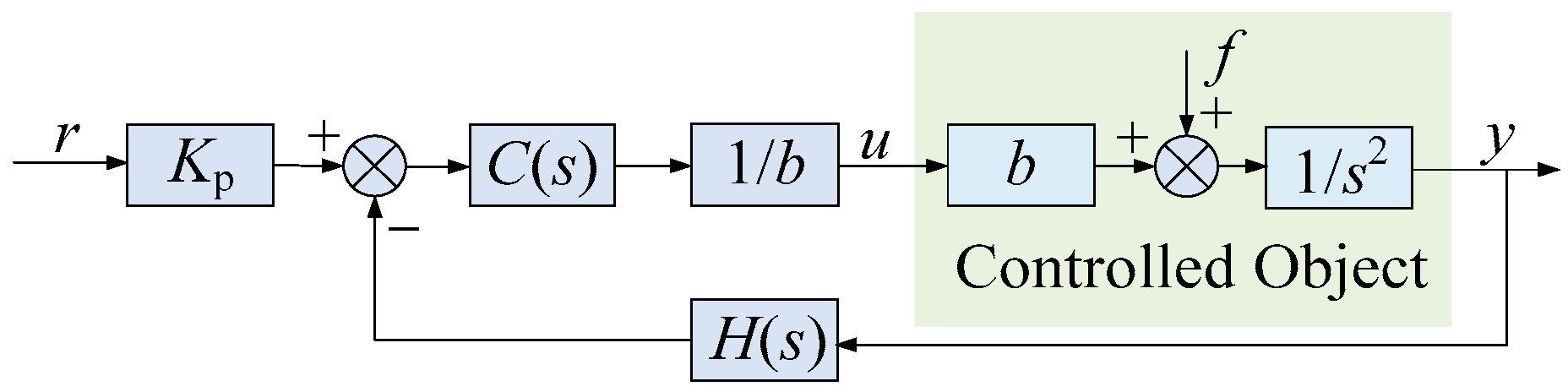
3.2.1. Principles of the Second-Order LADRC
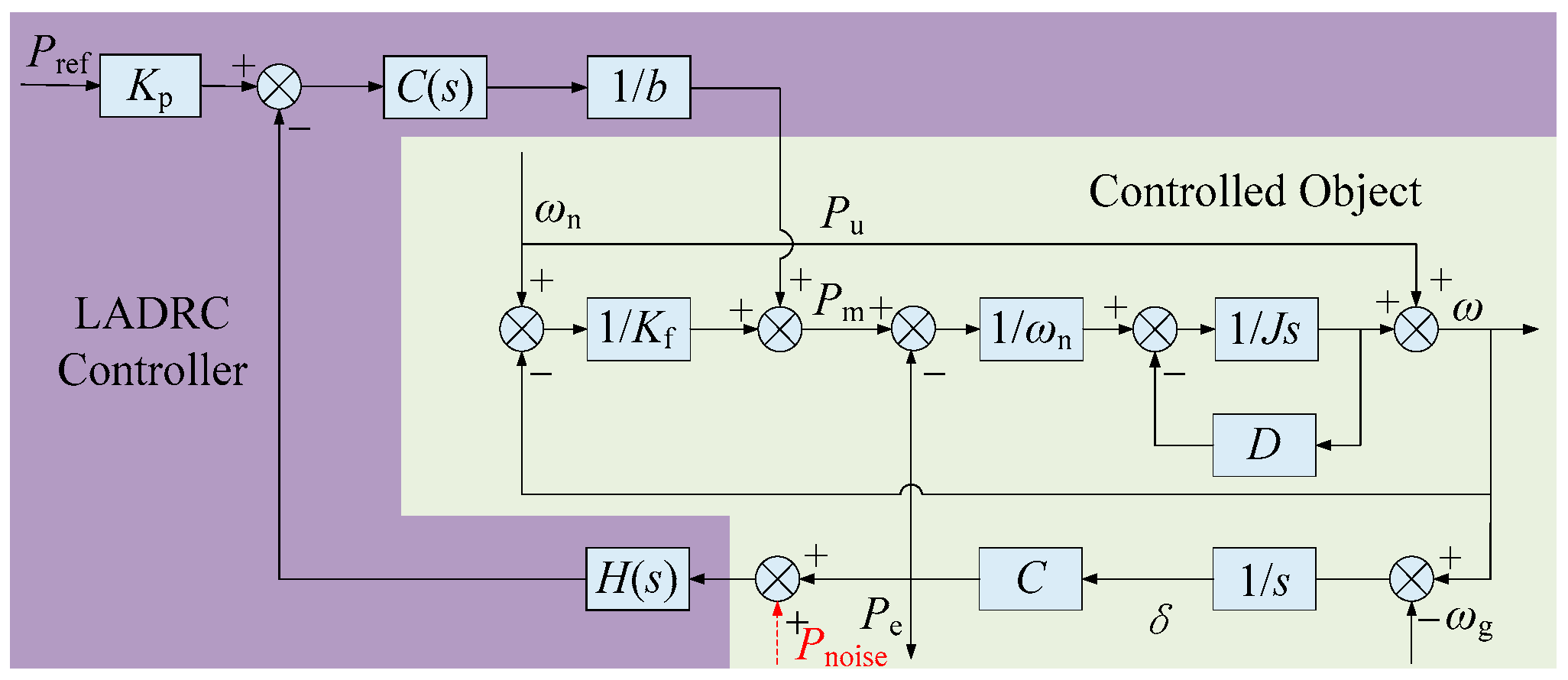
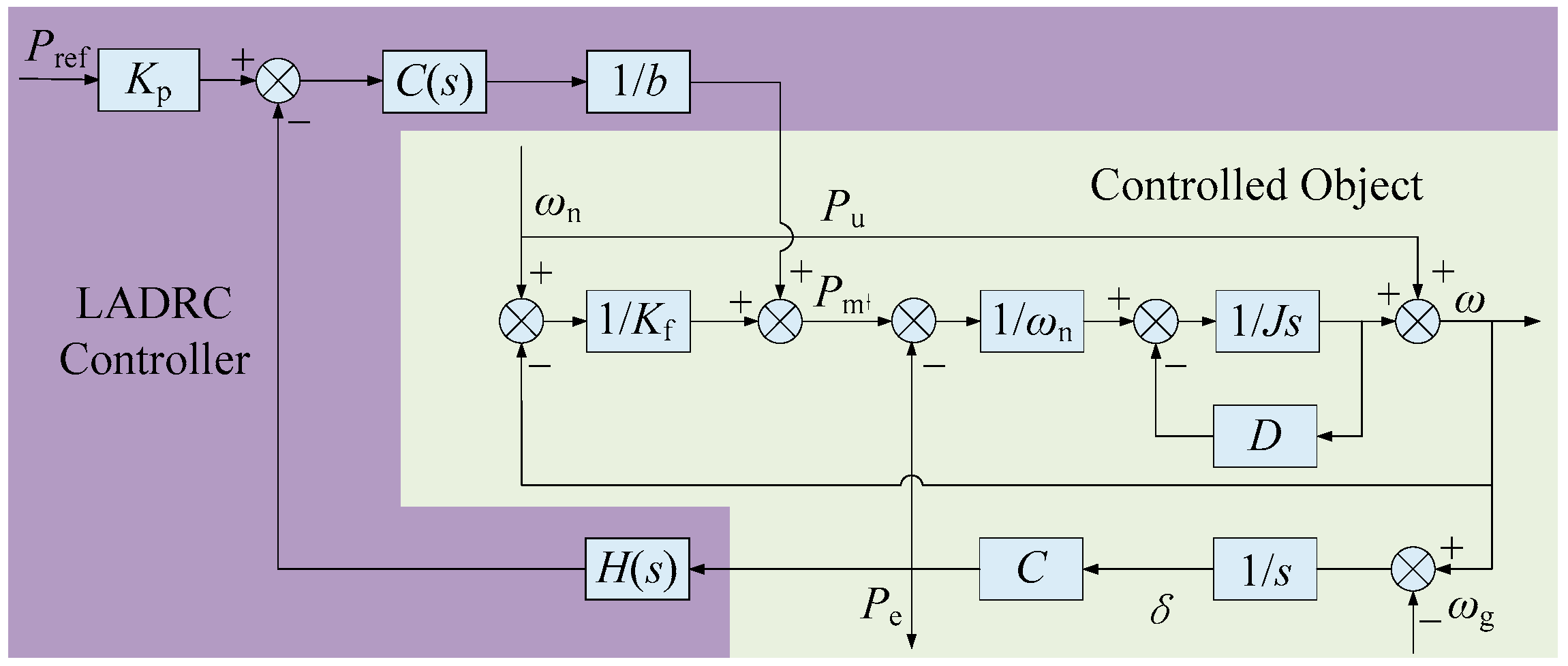
3.2.2. Control Strategy for Active Power of VSG Based on LADRC
4. Parameters Tuning for Controller
4.1. Nominal Performance Concerning
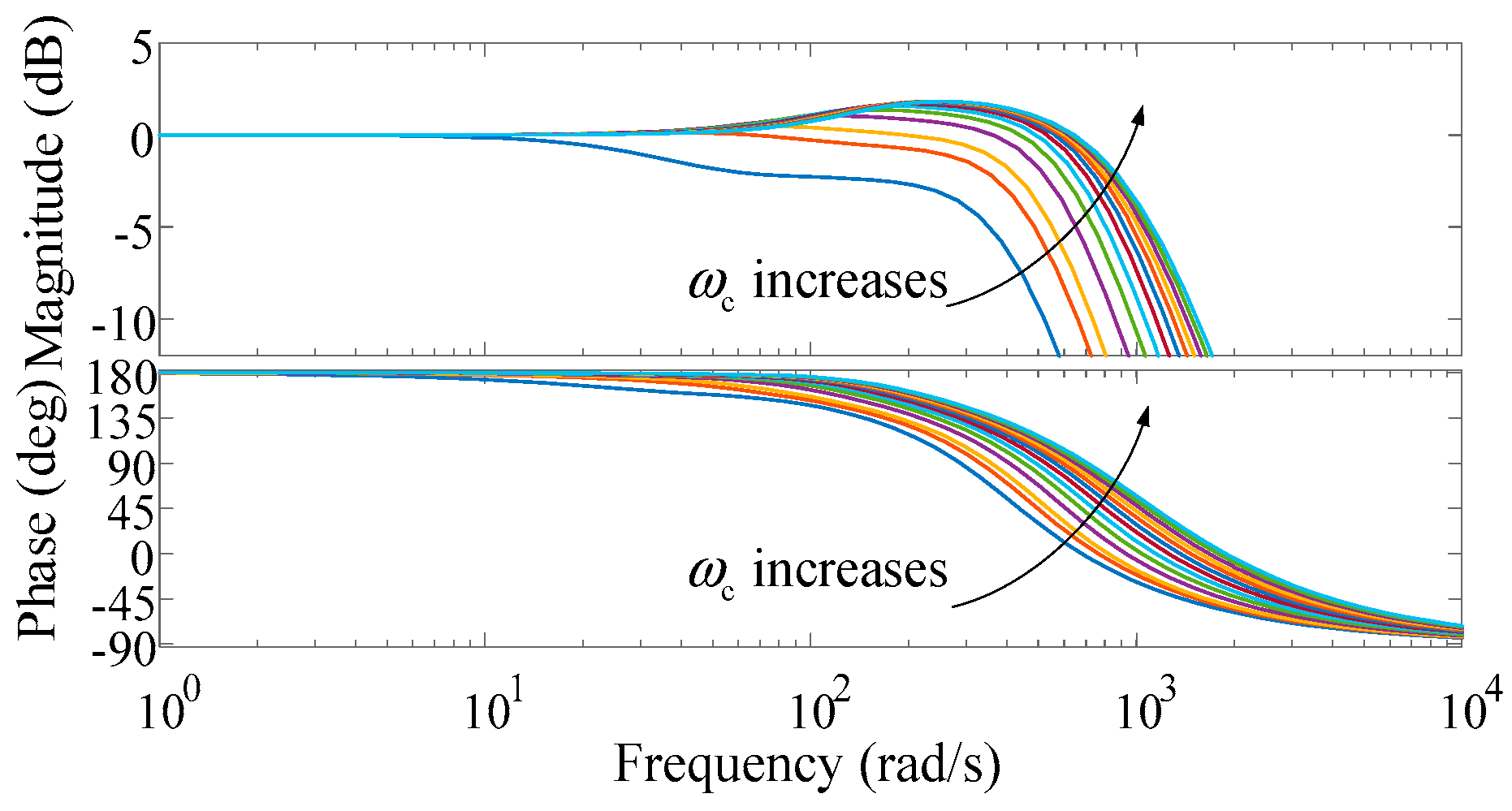
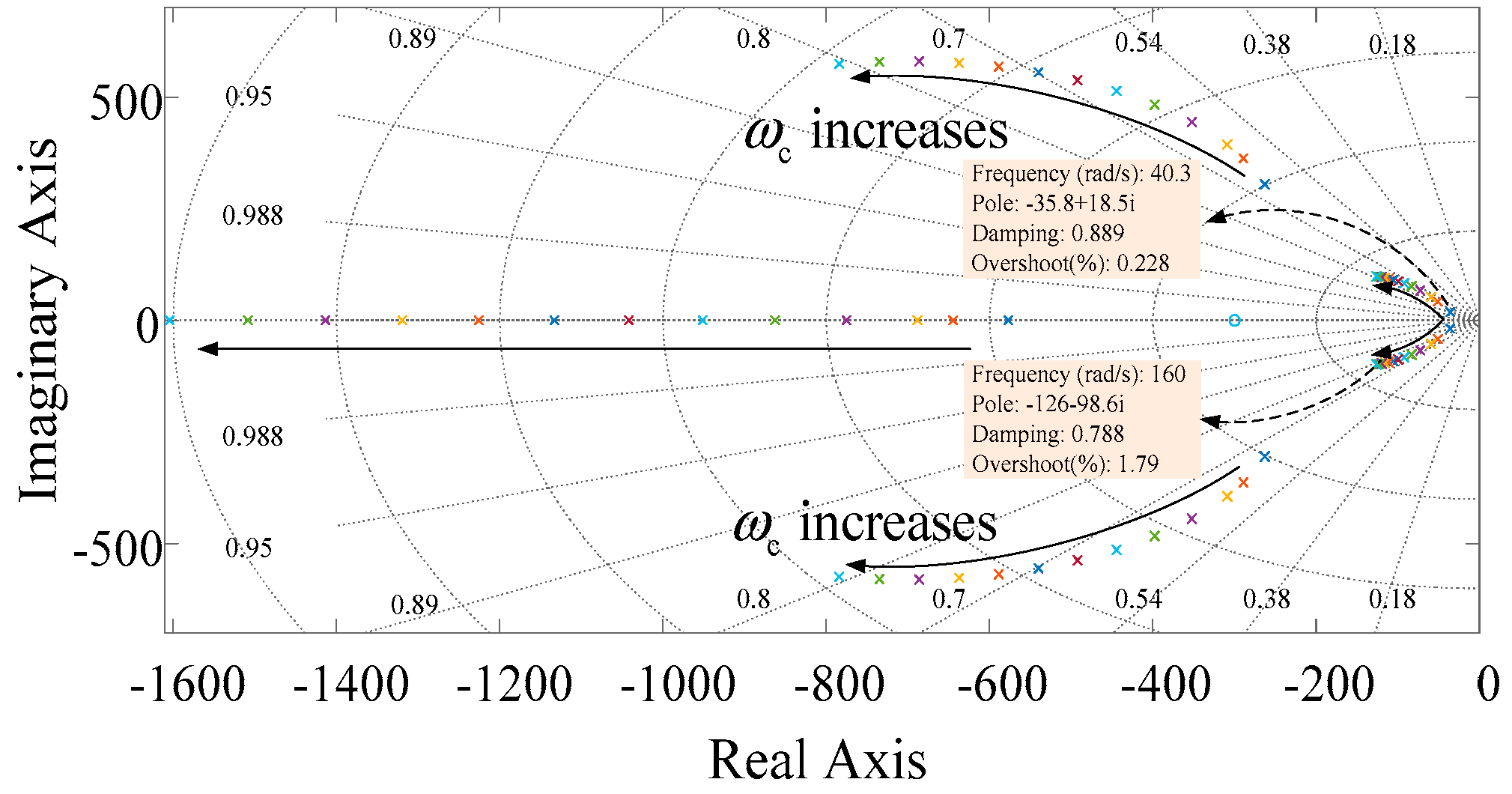
4.1.1. Parameter Increases When Remains Unchanged
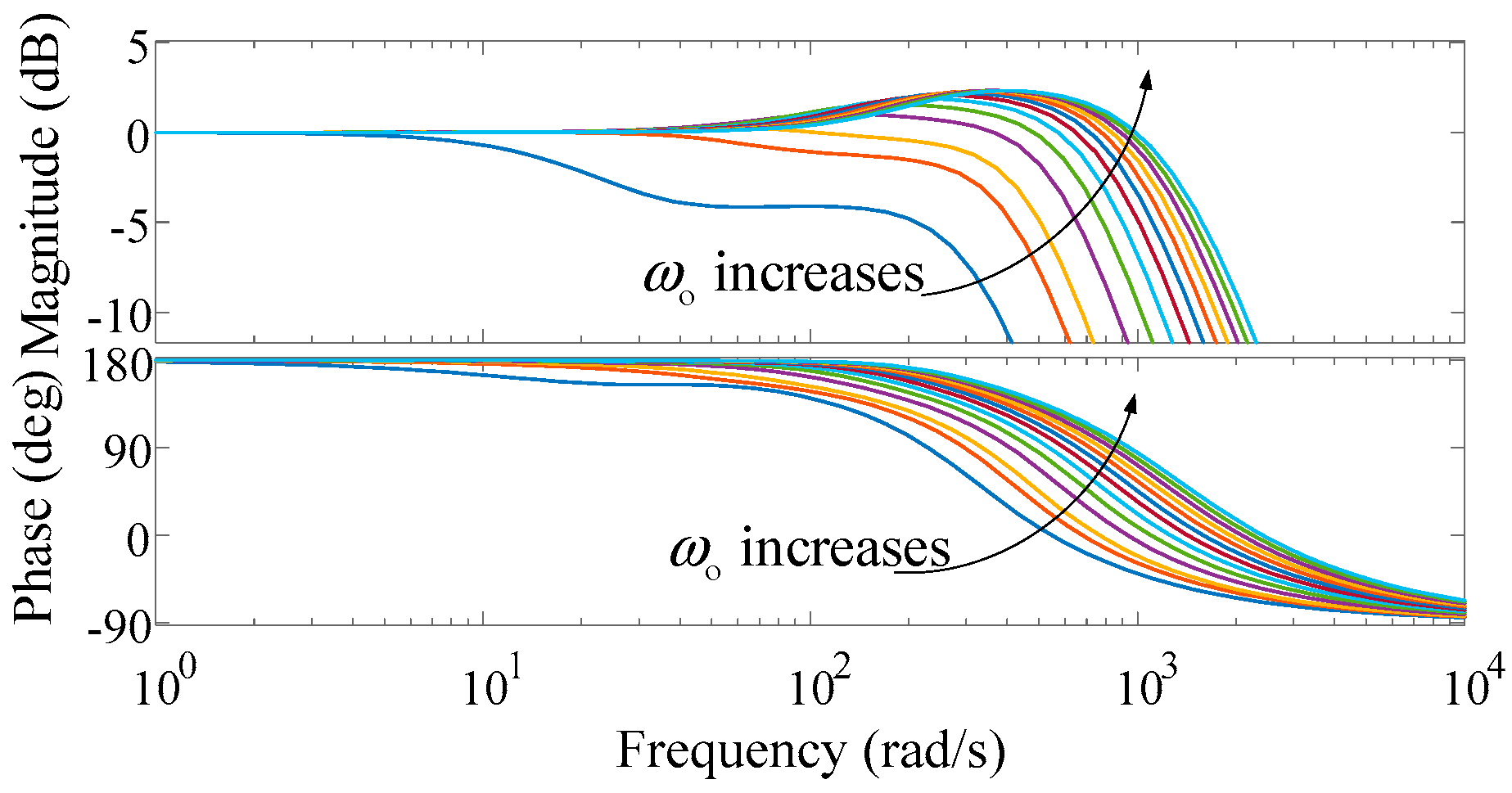
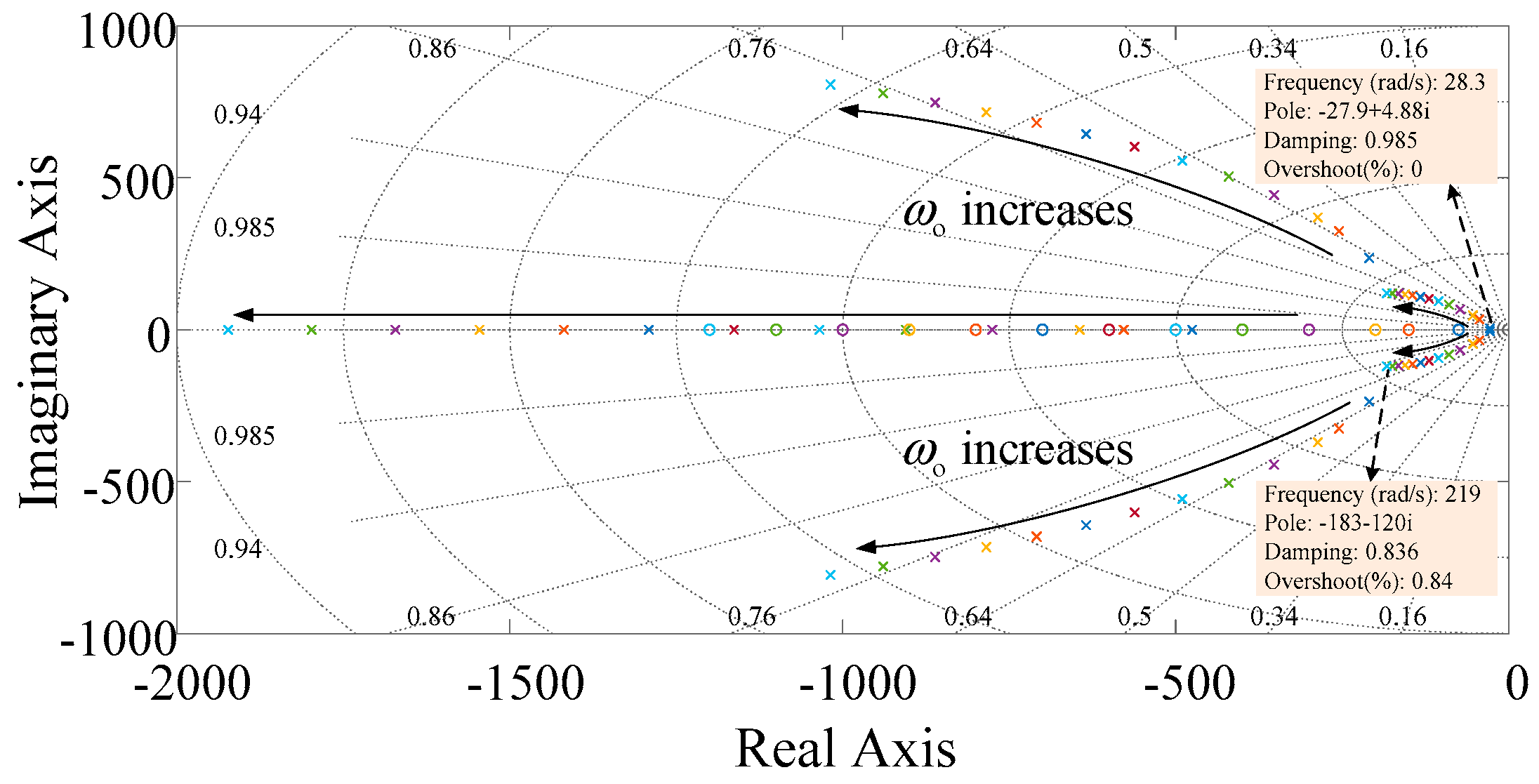
4.1.2. Parameter Increases When Remains Unchanged
- The appropriate initial values for and should not be too large, as stated in the constraints given before. If the dynamic response speed is slow or the capability needs to be enhanced, and can be increased until the overshoot exists or the influence of high-frequency noise is obvious.
- Owing to having a more pronounced influence on the dynamic performance of the system, we can reduce first until the overshoot disappears or the influence of noise is controllable. Then, we can increase until the overshoot exists or the influence of the noise is obvious. After this, the tuning sequences can be exchanged until the ideal performance requirement is met.
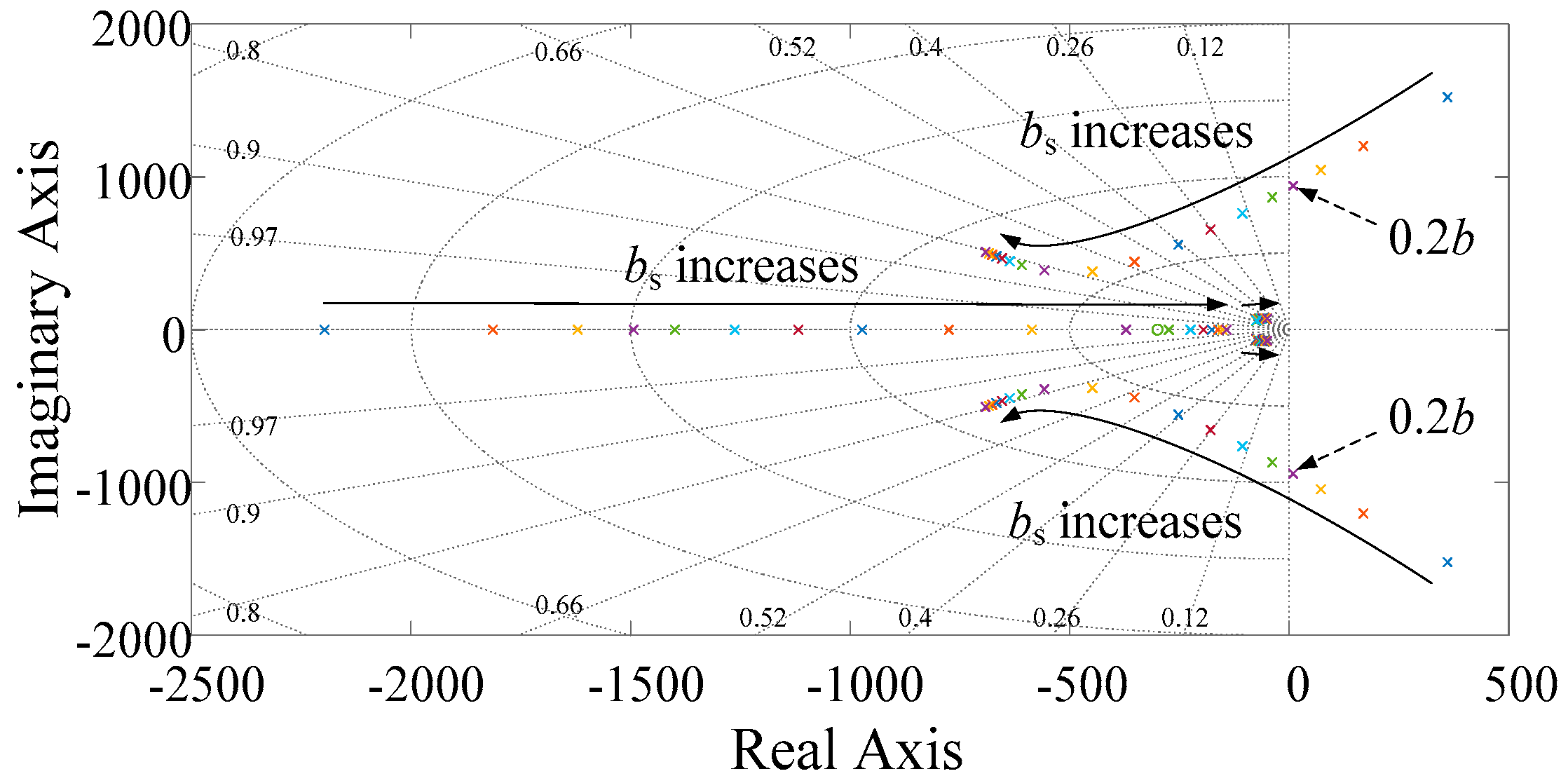
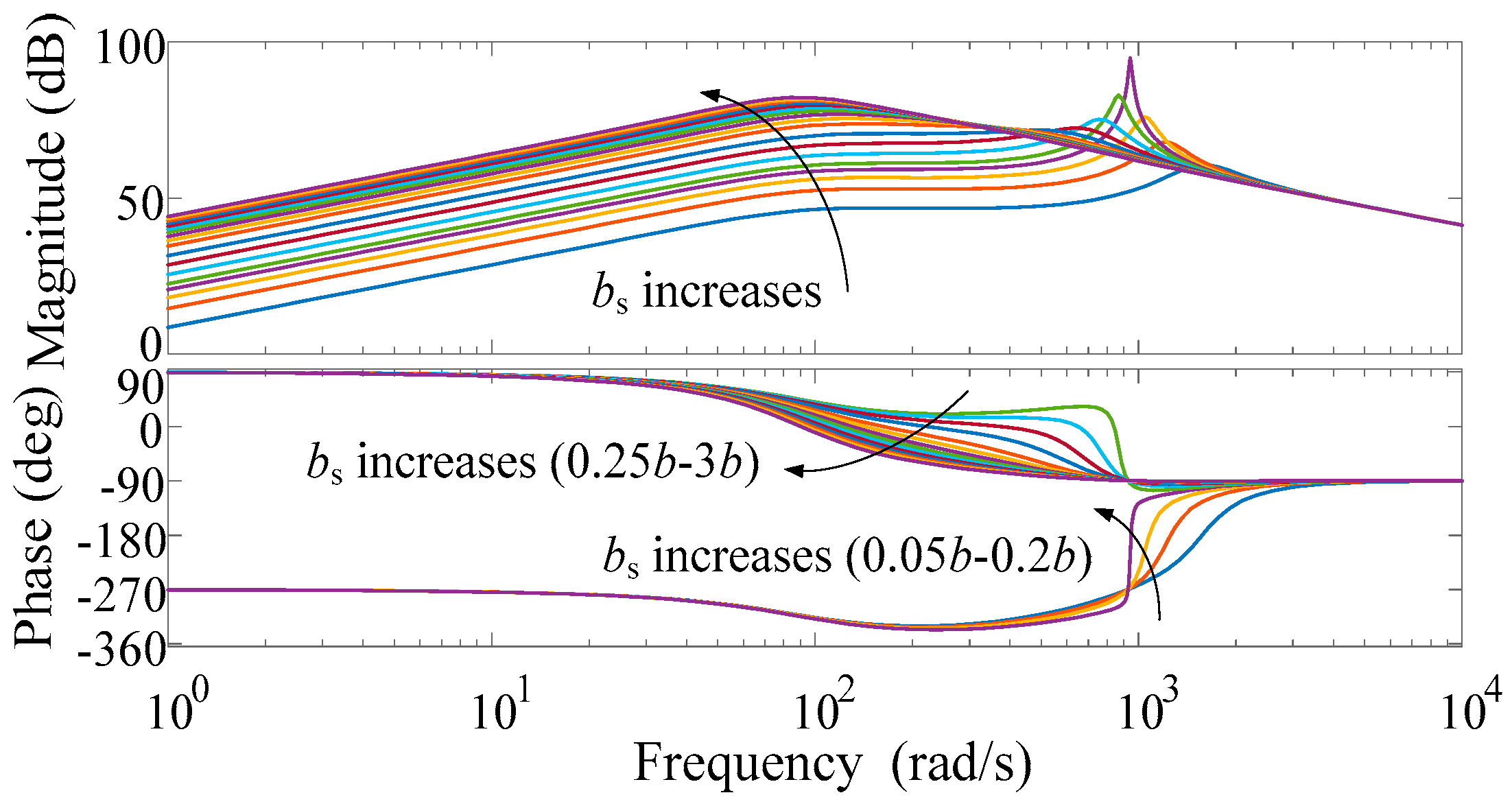
- If the gain of the controlled object is not clear, the reasonable initial value for should not be too small for stability consideration. If the system is unstable, we can increase . Besides, if the capability of rejecting the disturbance needs to be enhanced, we can then decrease .
4.2. Robust Performance Concerning
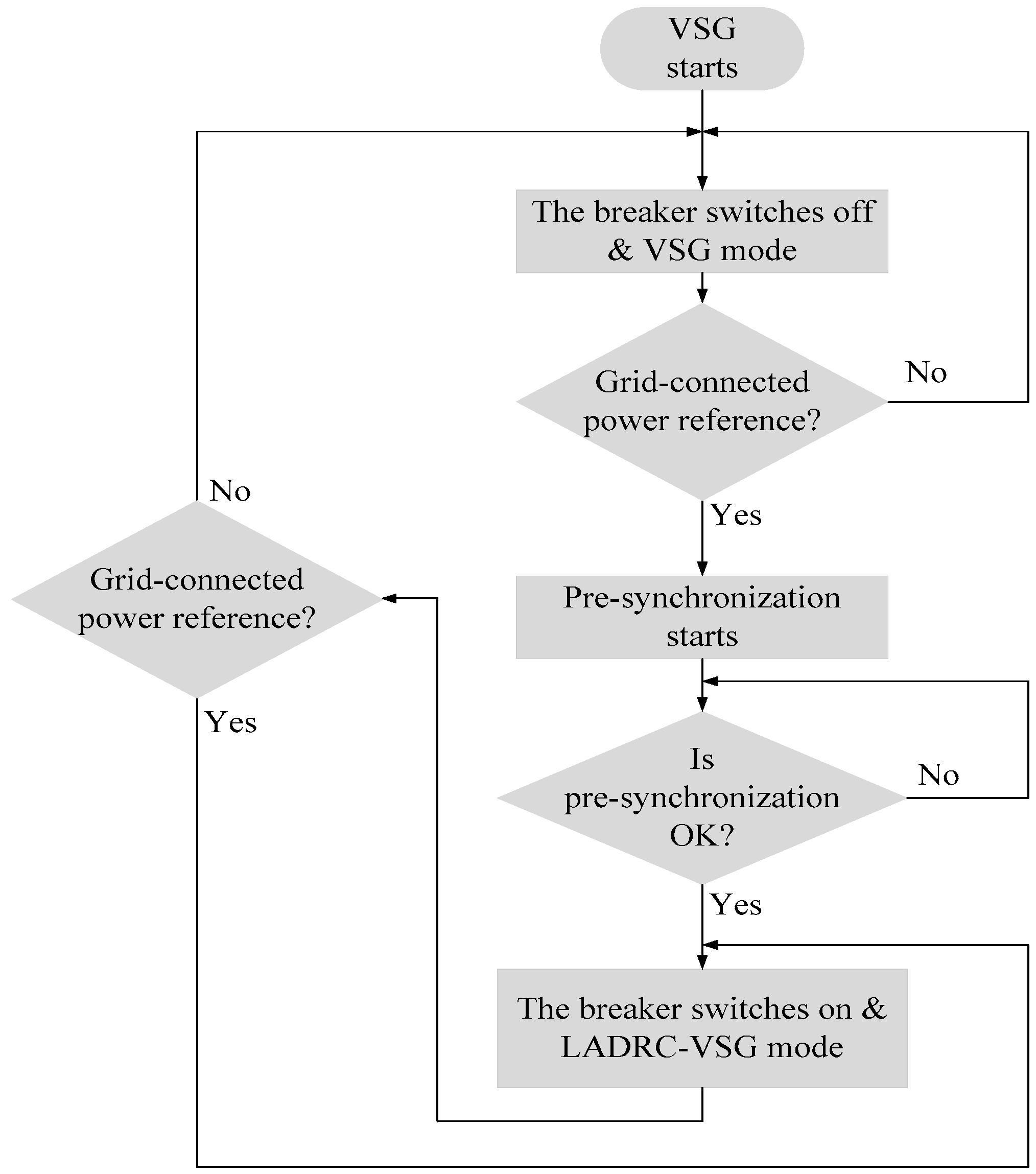
5. Case Study
- The VSG starts.
- The VSG runs under island-mode and the breaker maintains “off” status. Meanwhile, the controller detects the grid-connected power reference. If the grid-connected power reference does not exist, continue with Step 2, otherwise the pre-synchronization starts and we proceed to the next step.
- The system judges whether pre-synchronization is completed or not. If it is uncompleted, the procedure continues pre-synchronization, or else it moves to Step 4.
- The breaker is closed and the inverter runs under the mode of LADRC-VSG. Meanwhile, the system detects whether the grid-connected power reference is still there or not. If it is, the procedure of Step 4 continues, or else it goes back to Step 2.
5.1. Performance Based on the Nominal Model
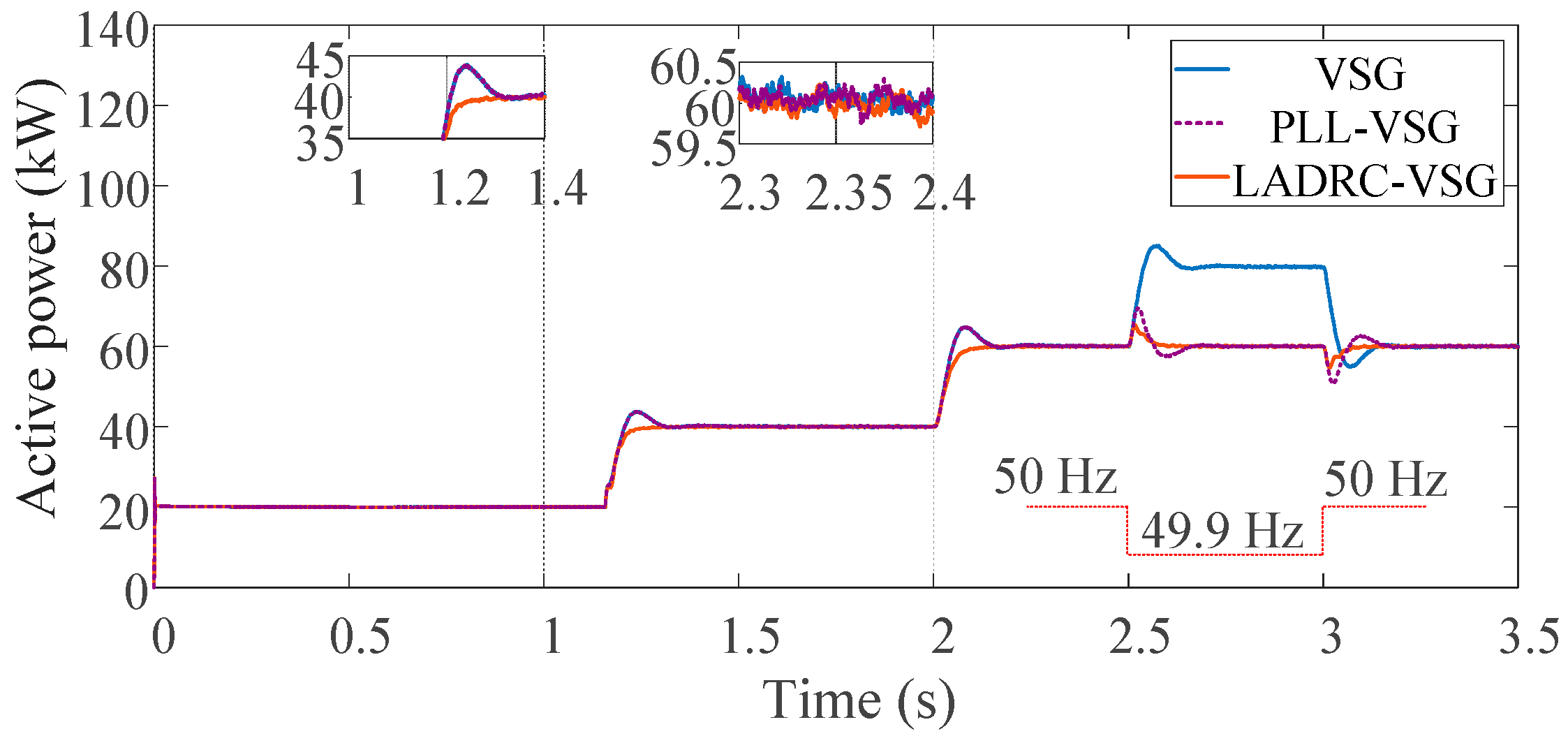
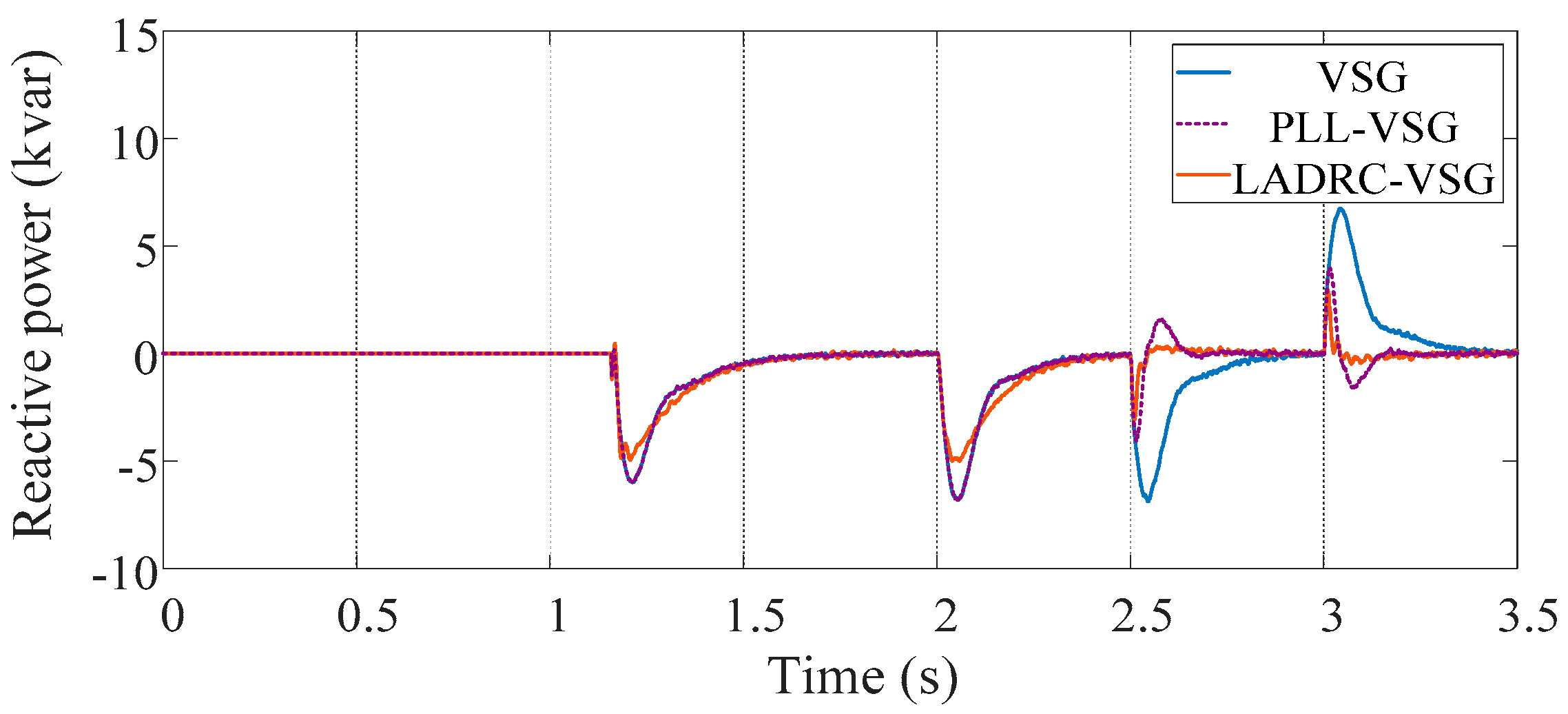
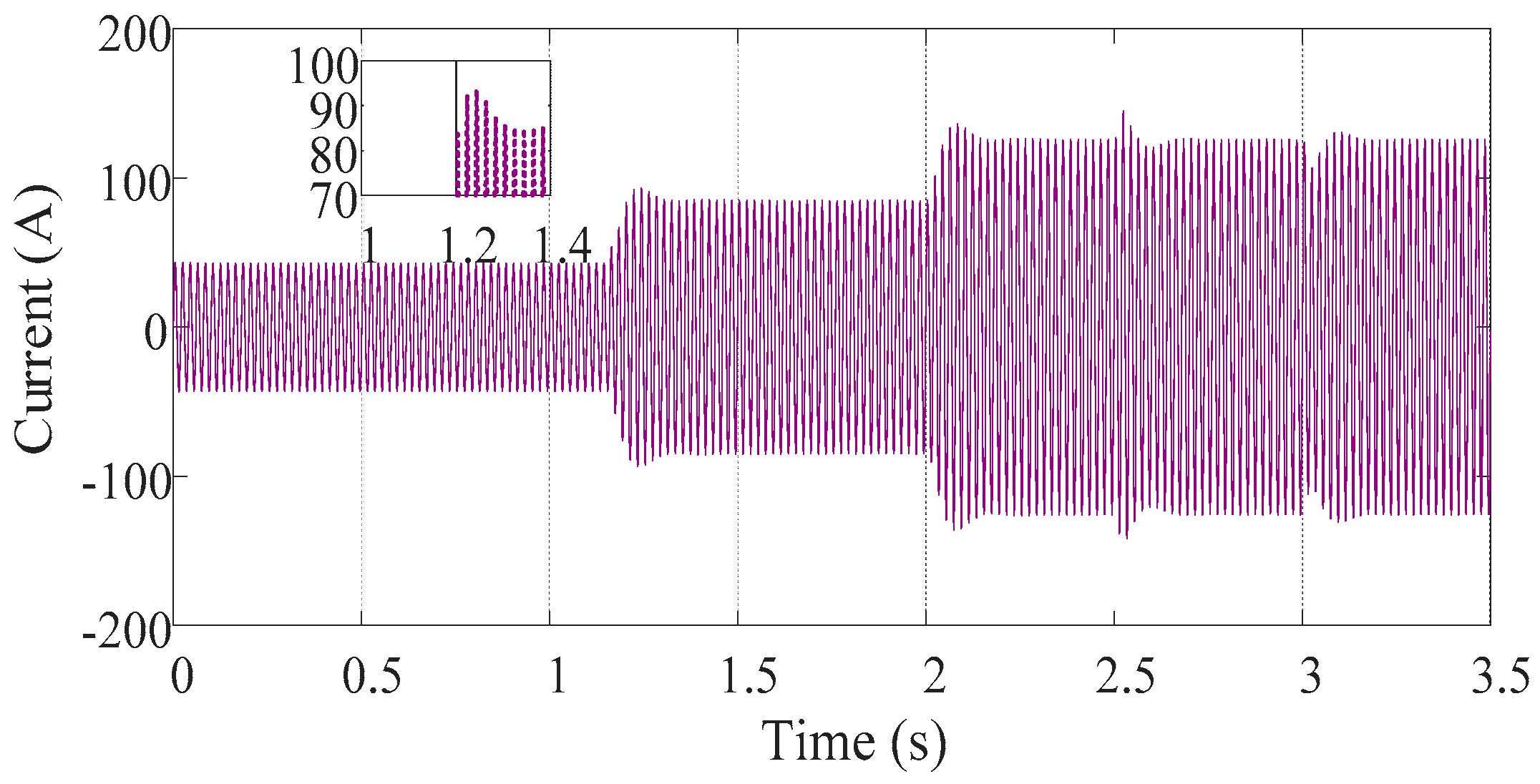
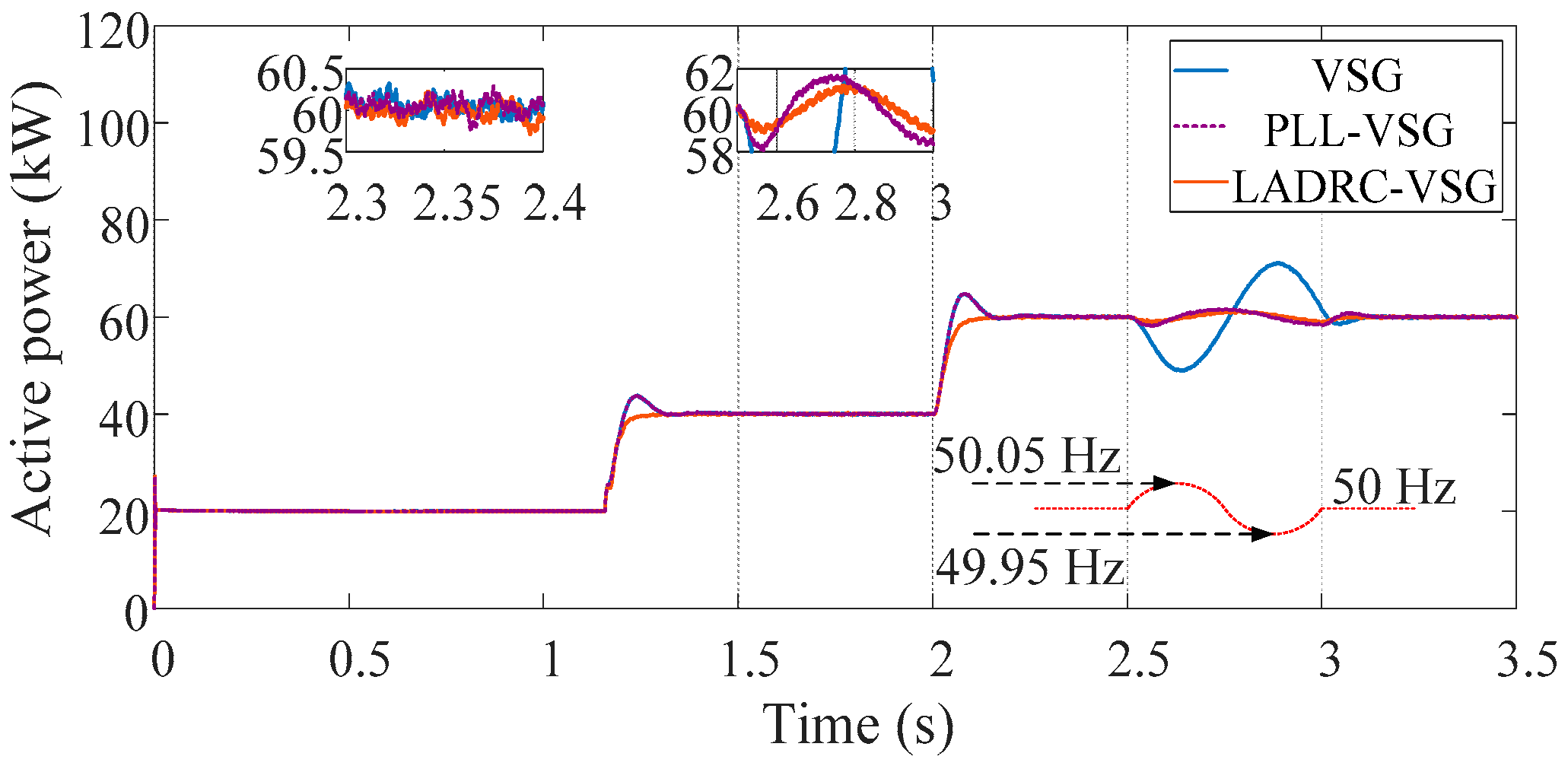
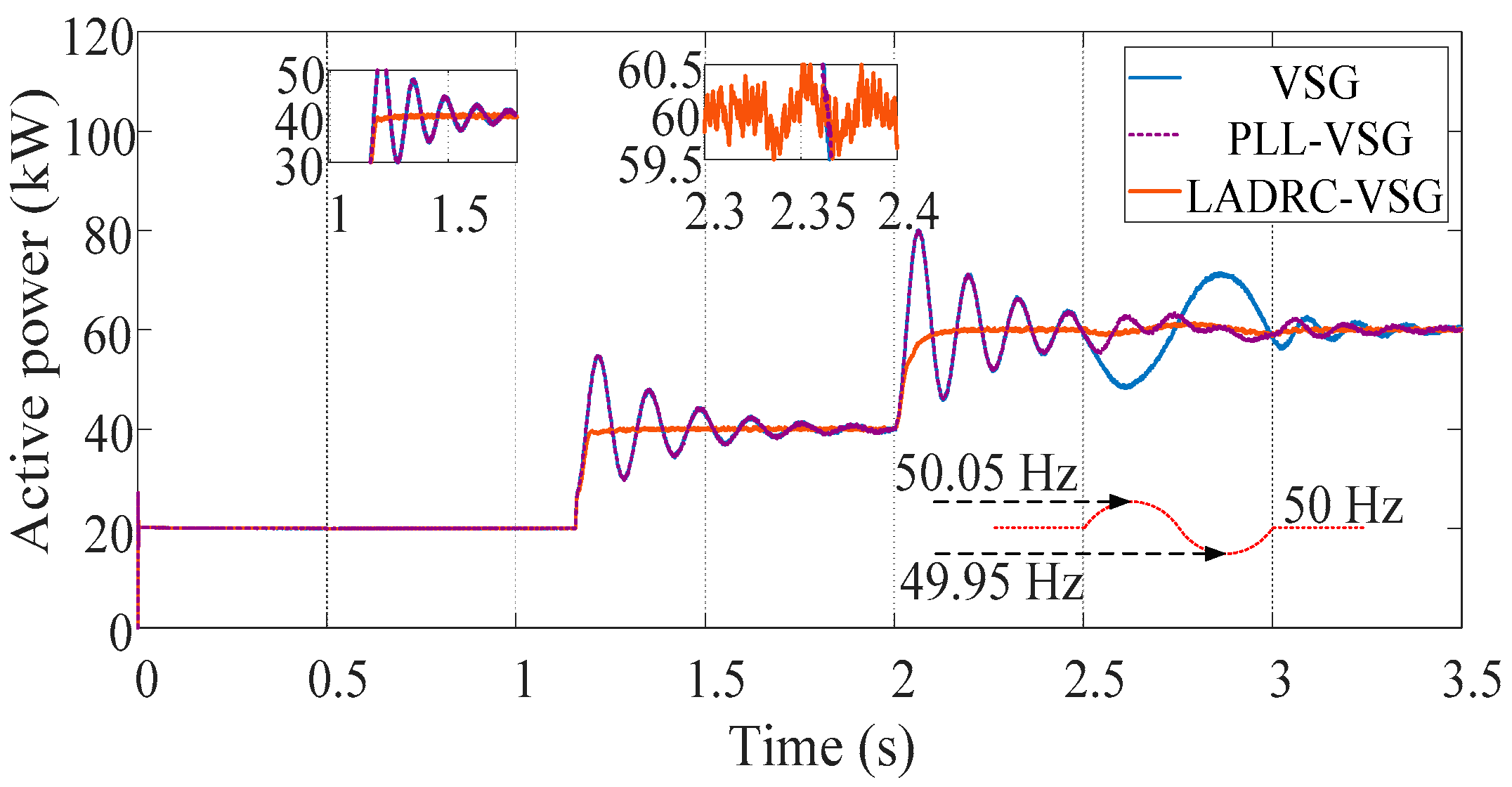
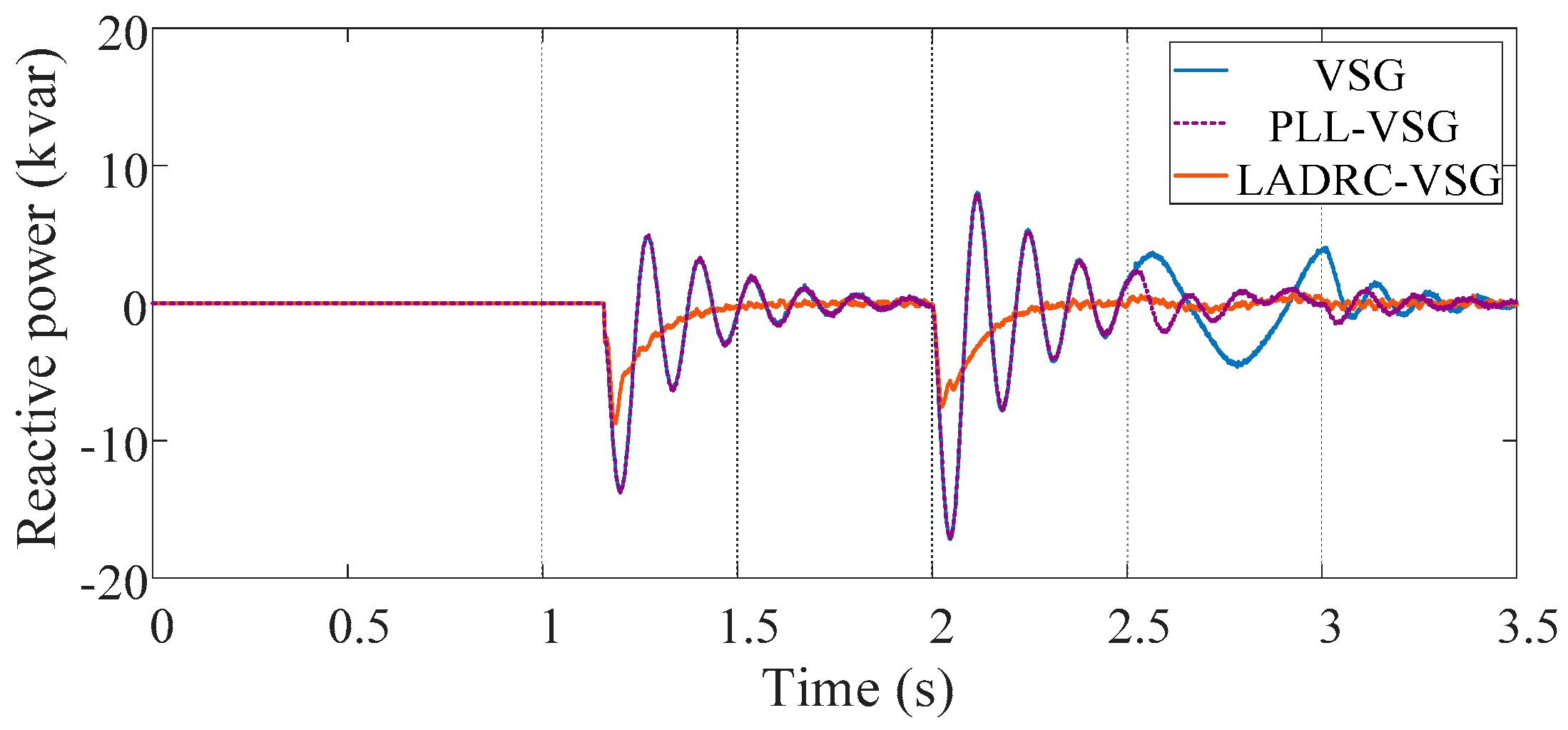
5.1.1. Step Change of Grid Frequency
5.1.2. Ramp Change of Grid Frequency
5.1.3. Sinewave form Change of Grid Frequency
5.2. Control Performance Based on the Parametric Perturbating Model
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Engler, A.; Soultanis, N. Droop control in LV-grids. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 16–18 November 2005; p. 6. [Google Scholar] [CrossRef]
- Chen, M.R.; Wang, H.; Zeng, G.Q.; Dai, Y.X.; Bi, D.Q. Optimal PQ Control of Grid-Connected Inverters in a Microgrid Based on Adaptive Population Extremal Optimization. Energies 2018, 11, 2107. [Google Scholar] [CrossRef]
- Adhikari, S.; Li, F. Coordinated Vf and PQ control of solar photovoltaic generators with MPPT and battery storage in microgrids. IEEE Trans. Smart Grid 2014, 5, 1270–1281. [Google Scholar] [CrossRef]
- Lopes, J.P.; Moreira, C.L.; Madureira, A.G.; Resende, F.O.; Wu, X.A.; Jayawarna, N.A.; Zhang, Y.A. Control strategies for microgrids emergency operation. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 16–18 November 2005; pp. 57–78. [Google Scholar] [CrossRef]
- Beck, H.P.; Hesse, R. Virtual synchronous machine. In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Visscher, K.; De Haan, S.W.H. Virtual synchronous machines (VSG’s) for frequency stabilisation in future grids with a significant share of decentralized generation. In Proceedings of the CIRED Seminar 2008: SmartGrids for Distribution, Frankfurt, Germany, 23–24 June 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using virtual synchronous generator with alternating moment of inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Vaddipalli, R.K.N.; Lopes, L.A.; Rathore, A.K. Virtual Synchronous Generator with Variable Inertia Emulation Via Power Tracking Algorithm. In Proceedings of the 2018 2nd International Conference on Power, Energy and Environment: Towards Smart Technology (ICEPE), Shillong, India, 1–2 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Fan, W.; Yan, X.; Hua, T. Adaptive parameter control strategy of VSG for improving system transient stability. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017-ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 2053–2058. [Google Scholar] [CrossRef]
- Li, D.; Zhu, Q.; Lin, S.; Bian, X.Y. A self-adaptive inertia and damping combination control of VSG to support frequency stability. IEEE Trans. Energy Convers. 2017, 32, 397–398. [Google Scholar] [CrossRef]
- Rahman, F.S.; Kerdphol, T.; Watanabe, M.; Mitani, Y. Optimization of virtual inertia considering system frequency protection scheme. Electr. Power Syst. Res. 2019, 170, 294–302. [Google Scholar] [CrossRef]
- Haizhen, X.; Xing, Z.; Fang, L.; Fubin, M.; Rongliang, S.; Hua, N. An improved virtual synchronous generator algorithm for system stability enhancement. In Proceedings of the 2015 IEEE 2nd International Future Energy Electronics Conference (IFEEC), Taipei, Taiwan, 1–4 November 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, X.; Liu, F.; Mao, F.; Shi, R.; Yu, C.; Yu, Y. Virtual Synchronous Generator Control Strategy Based on Lead-lag Link Virtual Inertia. Proc. CSEE 2017, 37, 1918–1926. [Google Scholar] [CrossRef]
- Li, X.; Hu, Y.; Shao, Y.; Chen, G. Mechanism analysis and suppression strategies of power oscillation for virtual synchronous generator. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 5–8 November 2017; pp. 4955–4960. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y.; Zhou, H.; Hu, W. A phase feedforward based virtual synchronous generator control scheme. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 3314–3318. [Google Scholar] [CrossRef]
- Yan, X.; Jia, J.; Li, Z.; Ge, Y. Power Control and Smooth Mode Switchover for Grid-connected Virtual Synchronous Generators. Autom. Electr. Power Syst. 2018, 42, 91–99. [Google Scholar] [CrossRef]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Deliv. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Khan, S.; Bletterie, B.; Anta, A.; Gawlik, W. On Small Signal Frequency Stability under Virtual Inertia and the Role of PLLs. Energies 2018, 11, 2372. [Google Scholar] [CrossRef]
- He, X.; Geng, H.; Yang, G. A generalized design framework of notch filter based frequency-locked loop for three-phase grid voltage. IEEE Trans. Ind. Electron. 2018, 65, 7072–7084. [Google Scholar] [CrossRef]
- Du, H.; Sun, Q.; Cheng, Q.; Ma, D.; Wang, X. An Adaptive Frequency Phase-Locked Loop Based on a Third Order Generalized Integral. Energies 2019, 12, 309. [Google Scholar] [CrossRef]
- Han, J.-Q. Auto-disturbances-rejection controller and its’ applications. Control Decis. 1998, 1, 19–23. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; p. 7. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar] [CrossRef]
- Lv, Z.; Sheng, W.; Zhong, Q.; Liu, H.; Zeng, Z.; Yang, L.; Liu, L. Virtual Synchronous Generator and Its Applications in Micro-grid. Proc. CSEE 2014, 34, 2591–2603. [Google Scholar] [CrossRef]
- Shintai, T.; Miura, Y.; Ise, T. Reactive power control for load sharing with virtual synchronous generator control. In Proceedings of the 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; pp. 846–853. [Google Scholar] [CrossRef]
- Zheng, T.; Chen, L.; Guo, Y.; Mei, S. Comprehensive control strategy of virtual synchronous generator under unbalanced voltage conditions. IET Gener. Transm. Distrib. 2017, 12, 1621–1630. [Google Scholar] [CrossRef]
- Hu, W.; Wu, Z.; Sun, C.; Song, Y.; Yuan, K. Modeling and parameter setting method for grid-connected inverter of energy storage system based on VSG. Electr. Power Autom. Equip. 2018, 13–23. [Google Scholar] [CrossRef]
- Chen, J.; Lundberg, K.H.; Davison, D.E.; Bernstein, D.S. The final value theorem revisited-infinite limits and irrational functions. IEEE Control Syst. Mag. 2007, 27, 97–99. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, X.; Zhang, Y.; Jiang, H. Research on Power Transmission Capability of VSC-HVDC Based on Second Order LADRC. Energy Procedia 2019, 158, 2592–2598. [Google Scholar] [CrossRef]
- Yuan, D.; Ma, X.; Zeng, Q.; Qiu, X. Research on frequency-band characteristics and parameters configuration of linear active disturbance rejection control for second-order systems. Control Theory Appl. 2013, 30, 1630–1640. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design, 2nd ed.; Wiley: New York, NY, USA, 2007; p. 22. [Google Scholar]
- Wu, M.; He, Y.; Yu, J. Robust Control Theory; Higher Education Press: Beijing, China, 2010; pp. 24–32. [Google Scholar]
- Åström, K.J.; Panagopoulos, H.; Hägglund, T. Design of PI controllers based on non-convex optimization. Automatica 1998, 34, 585–601. [Google Scholar] [CrossRef]
- Sun, L.; Li, D.; Gao, Z.; Yang, Z.; Zhao, S. Combined feedforward and model-assisted active disturbance rejection control for non-minimum phase system. ISA Trans. 2016, 64, 24–33. [Google Scholar] [CrossRef] [PubMed]
- Liu, F. Research on Microgrid Inverter Control Strategy Based on Virtual Synchronous Generator. Ph.D. Thesis, Hefei University of Technology, Hefei, China, April 2015. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Parameter | Symbol | Value |
|---|---|---|---|---|---|
| 220 | 800 | ||||
| 100 | 0.8 | ||||
| — | 3330 | 0.6 | |||
| — | 0.005 | 0.404 | |||
| — | 0.0628 | 1500 | |||
| 0.1 | 314.16 |
| Type of Disturbance | LADRC-VSG (kW) | VSG (kW) | PLL-VSG (kW) |
|---|---|---|---|
| Step change of frequency | 5.7 | 25.1 | 9.5 |
| Ramp change of frequency | 0.6 | 19.8 | 0.6 |
| Sinewave form change of frequency | 1.2 | 10.2 | 1.9 |
| Model mismatch; Sinewave form change of frequency | 1.4 | 11.6 | 4.9 |
| Type of Model | LADRC-VSG (%) | VSG (%) | PLL-VSG (%) |
|---|---|---|---|
| Normal model | 0 | 9.7 | 9.7 |
| Mismatch model | 0 | 37.2 | 37.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhu, J.; Dong, X.; Zhao, P.; Ge, P.; Zhang, X. A Control Strategy for Smooth Power Tracking of a Grid-Connected Virtual Synchronous Generator Based on Linear Active Disturbance Rejection Control. Energies 2019, 12, 3024. https://doi.org/10.3390/en12153024
Zhang Y, Zhu J, Dong X, Zhao P, Ge P, Zhang X. A Control Strategy for Smooth Power Tracking of a Grid-Connected Virtual Synchronous Generator Based on Linear Active Disturbance Rejection Control. Energies. 2019; 12(15):3024. https://doi.org/10.3390/en12153024
Chicago/Turabian StyleZhang, Yaya, Jianzhong Zhu, Xueyu Dong, Pinchao Zhao, Peng Ge, and Xiaolian Zhang. 2019. "A Control Strategy for Smooth Power Tracking of a Grid-Connected Virtual Synchronous Generator Based on Linear Active Disturbance Rejection Control" Energies 12, no. 15: 3024. https://doi.org/10.3390/en12153024
APA StyleZhang, Y., Zhu, J., Dong, X., Zhao, P., Ge, P., & Zhang, X. (2019). A Control Strategy for Smooth Power Tracking of a Grid-Connected Virtual Synchronous Generator Based on Linear Active Disturbance Rejection Control. Energies, 12(15), 3024. https://doi.org/10.3390/en12153024