Nonlinear Control of a Doubly Fed Generator Supplied by a Current Source Inverter

Abstract
:1. Introduction
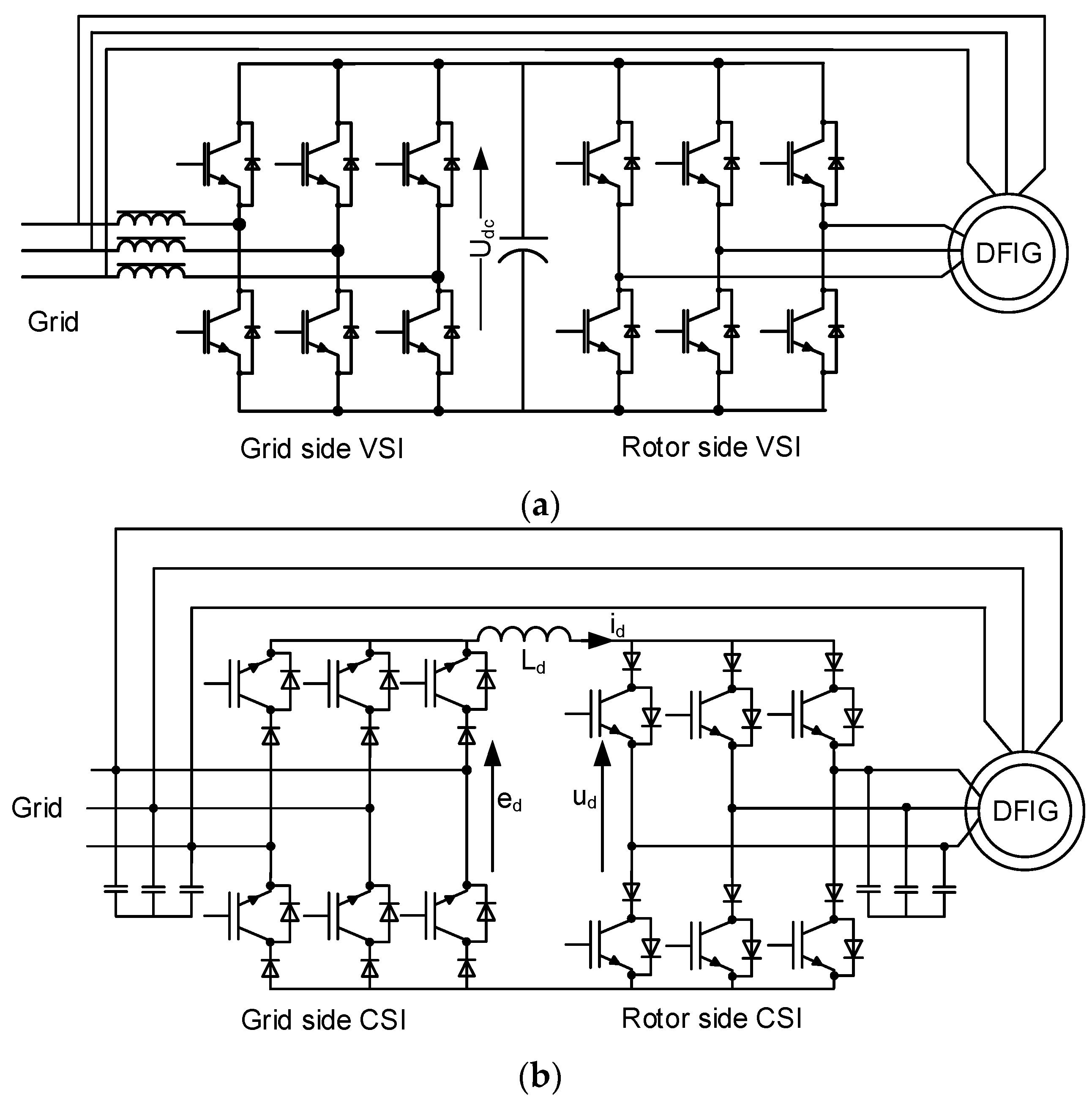
2. Doubly Fed Generator System
3. Generator Model
3.1. Vector Model of the Machine
3.2. Multiscalar Z-Type Model of the Machine
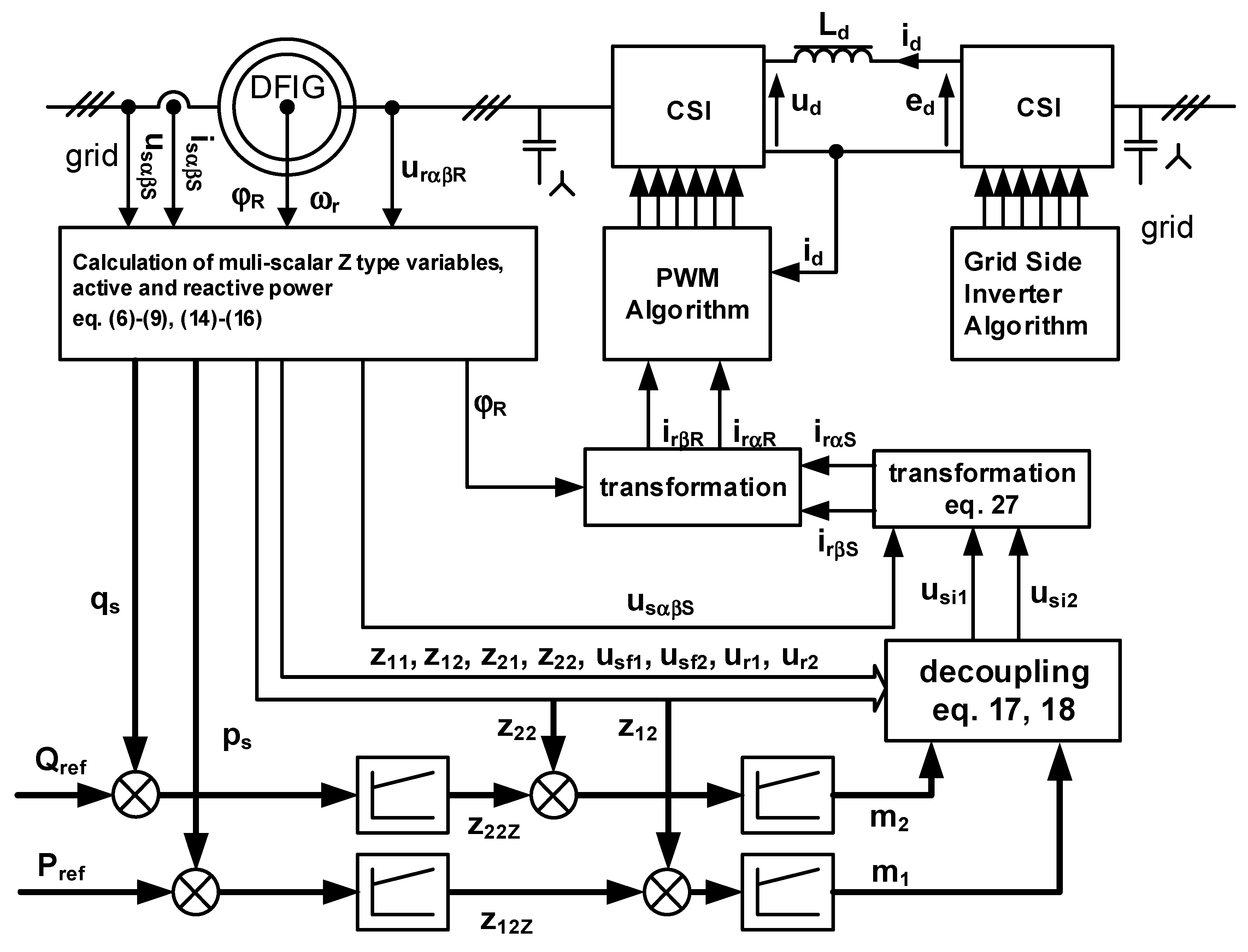
4. Active and Reactive Power Control System
5. Model and Simulation Results
- (1)
- (2)
- Changes of the reference active and reactive powers—Figure 6;
- (3)
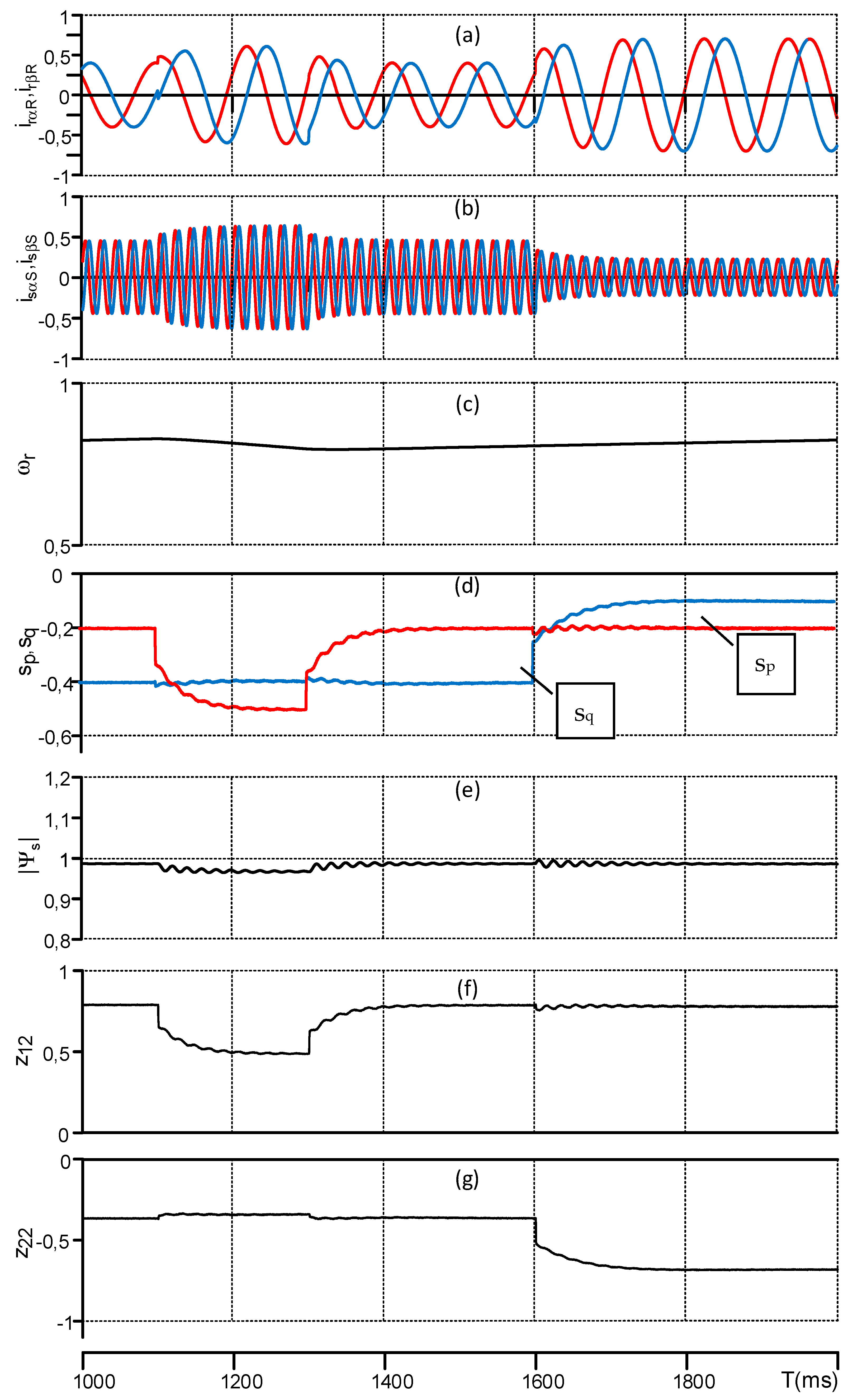
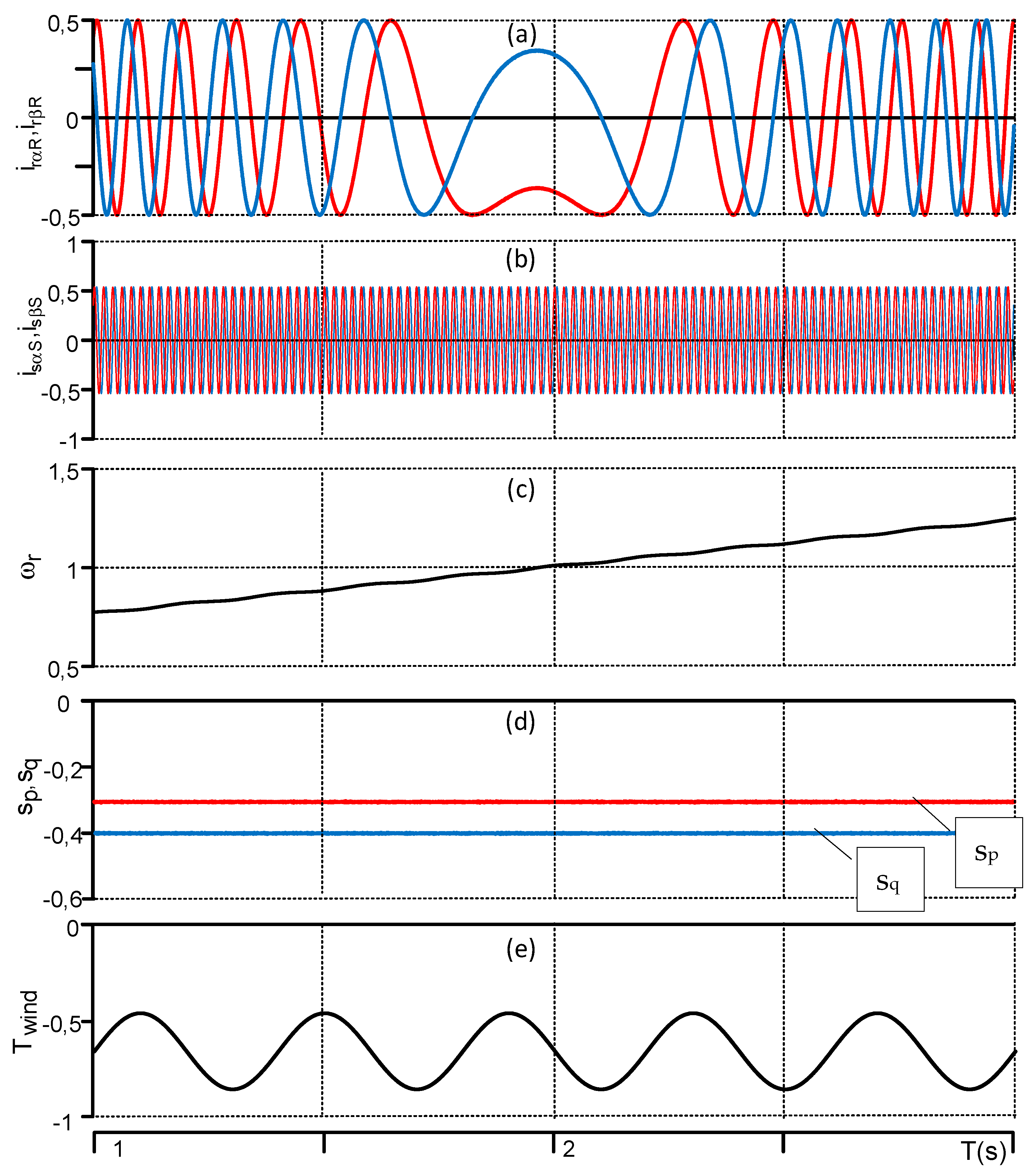
- DFIG system behavior during changes of the rotor speed from under-synchronous to over-synchronous speed with constant reference active and reactive powers—Figure 7.
- (4)
- DFIG system behavior during changes of the active and reactive powers with constant driven torque—Figure 8.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Rs, Rr | stator and rotor resistances; |
| Ls, Lr | stator and rotor inductances; |
| Lm | mutual inductance; |
| J | moment of rotor inertia; |
| Tdr | drive torque; |
| ωr, z11 | pulsation of reference frame; |
| ωa | mechanical speed; |
| sp, sq | stator active and reactive powers; |
| z12, z22, z21 | Z-type multi-scalar variables; |
| ur1, ur2, usi1, usi2 | Z-type auxiliary multi-scalar variables; |
| m1, m2 | control variables; |
| id | DC-link current; |
| ed, ud | DC-link voltages; |
| Rd, Ld | Resistance and inductance of DC-link choke; |
| Cm | output filter capacitance. |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Values |
|---|---|---|
| Rs | stator resistance | 2.833 Ω/0.067 p.u. |
| Rr | rotor resistance | 2.867 Ω/0.068 p.u. |
| Lm | magnetizing inductance | 0.15 H/1.123 p.u. |
| Ls, Lr | stator and rotor inductance | 0.164 H/1.1227 p.u |
| Lσ | leakage inductance | 0.014 H/ |
| Pn | nominal power | 2 kW |
| Ins | nominal stator current | 5.5 A |
| Inr | nominal rotor current | 3.4 A |
| Un | nominal stator voltage | 400 V |
| n | nominal rotor speed | 910 rpm |
| f | nominal frequency | 50 Hz |
| r | turn ratio Ns/Nr | 1 |
| Ld | choke inductance | 6.2 mH/0.05 p.u |
| Cm | filter capacitance | 280 uF/0.35 p.u |
| Ub = Un | reference voltage | 400 V |
| Ins | reference current | 9.52 A |
| Sb | reference power | 3810 VA |
| Symbol | Quantity | Values |
|---|---|---|
| kpP | proportional gain for active power controller | 1.5 |
| kiP | integral gain for active power controller | 0.15 |
| kpQ | proportional gain for reactive power controller | 1.5 |
| kiQ | integral gain for reactive power controller | 0.15 |
| kp12 | proportional gain for z12 variable controller | 2.5 |
| ki12 | integral gain for z12 variable controller | 0.5 |
| kp22 | proportional gain for z22 variable controller | 2.5 |
| ki22 | integral gain for z22 variable controller | 0.5 |
References
- Hombu, M.; Ueda, S.; Ueda, A.; Matsuda, Y. A New Current Source GTO Inverter with Sinusoidal Output Voltage and Current. IEEE Trans. Ind. Appl. 1985, 5, 1192–1198. [Google Scholar] [CrossRef]
- Vellvehi, M.; Galvez, J.L.; Perpina, X.; Jorda, X.; Godignon, P.; Millan, J. Trench isolation technique for Reverse Blocking IGBT using Boron Nitride doping wafers. In Proceedings of the 13th European Conference on Power Electronics and Applications (EPE 2009), Barcelona, Spain, 8–10 September 2009. [Google Scholar]
- Takei, M.; Harada, Y.; Ueno, K. 600V-IGBT with reverse blocking capability. In Proceedings of the 13th International Symposium on Power Semiconductor Devices and ICs (ISPSD’01), Osaka, Japan, 4–7 June 2001. [Google Scholar] [CrossRef]
- Walczyna, A. Właściwości maszyny indukcyjnej dwustronnie zasilanej sterowanej źródłem prądu w obwodzie wirnika (polish) (A properties of a double-fed induction machine controlled by a current source in the rotor circuit). Prz. Elektrotech. Zesz. 1982, 10, 70–75. [Google Scholar]
- Smith, G.A.; Nigim, K.A. Wind-energy recovery by a static Scherbius induction generator. IEE Proc. C-Gener. Transm. Distrib. 1981, 128, 317–324. [Google Scholar] [CrossRef]
- Lefley, P.W.; Peasgood, W.; Ong, R.; Wong, J.K.J. Sensorless closed loop control of a slip ring induction machine using adaptive signal processing. In Proceedings of the APEC 99, Fourteenth Annual Applied Power Electronics Conference and Exposition 1999 Conference Proceedings (Cat. No.99CH36285), Dallas, TX, USA, 14 March 1999; Volume 2, pp. 1251–1256. [Google Scholar] [CrossRef]
- Bogalecka, E.; Krzeminski, Z. Control systems of doubly-fed induction machine supplied by current controlled voltage source inverter. In Proceedings of the 1993 Sixth International Conference on Electrical Machines and Drives (Conf. Publ. No. 376), Oxford, UK, 8–10 September 1993; pp. 168–172. [Google Scholar]
- Mark, A.P.; Irudayaraj, G.C.R.; Vairamani, R.; Mylsamy, K. Dynamic Performance Analysis for Different Vector-Controlled CSI-Fed Induction Motor Drives. J. Power Electron. 2014, 14, 989–999. [Google Scholar] [CrossRef]
- Dakir, A.; Nowak, M.; Grochal, P.; Barlik, R. Simulation of a AC-drive with PWM current inverter and induction machine. In Proceedings of the 1995 Proceedings IEEE International Symposium Industrial Electronics, Dubrovnik, Croatia, 10–14 July 1995; Volume 1, pp. 327–331. [Google Scholar] [CrossRef]
- Kolmakov, N.M.; Bakhovtsev, I.A. Three-phase current source inverter with hysteresis control in voltage source mode. In Proceedings of the 16th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices, Erlagol, Altai, 29 June–3 July 2015; pp. 429–432. [Google Scholar] [CrossRef]
- Wu, B.; Dewan, S.B.; Slemon, G.R. PWM-CSI inverter for induction motor drives. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 Octorber 1989; Volume 1, pp. 508–513. [Google Scholar] [CrossRef]
- Espinoza, J.R.; Joos, G. A current-source-inverter-fed induction motor drive system with reduced losses. IEEE Trans. Ind. Appl. 1998, 34, 796–805. [Google Scholar] [CrossRef]
- Dai, J.; Xu, D.; Wu, B. A Novel Control Scheme for Current-Source-Converter-Based PMSG Wind Energy Conversion Systems. IEEE Trans. Power Electron. 2009, 24, 963–972. [Google Scholar] [CrossRef]
- Singh, A.; Benzaquen, J.; Mirafzal, B. Current Source Generator–Converter Topology for Direct-Drive Wind Turbines. IEEE Trans. Ind. Appl. 2017, 54, 1663–1670. [Google Scholar] [CrossRef]
- Chwa, D.; Lee, K.B. Variable Structure Control of the Active and Reactive Powers for a DFIG in Wind Turbines. IEEE Trans. Ind. Appl. 2010, 46, 2545–2555. [Google Scholar] [CrossRef]
- Yang, S.; Ajjarapu, V. A Speed-Adaptive Reduced-Order Observer for Sensorless Vector Control of Doubly Fed Induction. Energy 2010, 25, 891–900. [Google Scholar]
- Pura, P.; Iwanski, G. Direct Torque Control of a Doubly-Fed Induction Generator Connected to Unbalanced Grid. Prz. Elektrotech. 2016, 1, 42–46. [Google Scholar] [CrossRef] [Green Version]
- Kalamian, N.; Kazemi, M.V.; Gholomian, S.A. Direct power control of DFIG by using nonlinear model predictive controller. Asian J. Control 2016, 18, 985–999. [Google Scholar] [CrossRef]
- Krzeminski, Z. Sensorless multiscalar control of double fed machine for wind power generators. In Proceedings of the Power Conversion Conference-Osaka 2002, Osaka, Japan, 2–5 April 2002; Volume 1, pp. 334–339. [Google Scholar] [CrossRef]
- Morawiec, M.; Krzeminski, Z.; Wlas, M. PWM current source inverter with IGBT transistors and multiscalar model control system. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; p. 10. [Google Scholar] [CrossRef]
- Geng, Y.; Deng, R.; Dong, W.; Wang, K.; Liu, H.; Wu, X. An Overlap-Time Compensation Method for Current-Source Space-Vector PWM Inverters. IEEE Trans. Power Electron. 2018, 33, 3192–3203. [Google Scholar] [CrossRef]
- Shang, J.; Li, Y.W. A space-vector modulation method for common-mode voltage reduction in current-source converters. IEEE Trans. Power Electron. 2014, 29, 374–385. [Google Scholar] [CrossRef]
- Fernández, E.; Paredes, A.; Vicent Sala, V.; Romeral, L. A Simple Method for Reducing THD and Improving the Efficiency in CSI Topology Based on SiC Power Devices. Energies 2018, 11, 2798. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blecharz, K.; Morawiec, M. Nonlinear Control of a Doubly Fed Generator Supplied by a Current Source Inverter. Energies 2019, 12, 2235. https://doi.org/10.3390/en12122235
Blecharz K, Morawiec M. Nonlinear Control of a Doubly Fed Generator Supplied by a Current Source Inverter. Energies. 2019; 12(12):2235. https://doi.org/10.3390/en12122235
Chicago/Turabian StyleBlecharz, Krzysztof, and Marcin Morawiec. 2019. "Nonlinear Control of a Doubly Fed Generator Supplied by a Current Source Inverter" Energies 12, no. 12: 2235. https://doi.org/10.3390/en12122235
APA StyleBlecharz, K., & Morawiec, M. (2019). Nonlinear Control of a Doubly Fed Generator Supplied by a Current Source Inverter. Energies, 12(12), 2235. https://doi.org/10.3390/en12122235