Switched-Capacitor Boost Converter for Low Power Energy Harvesting Applications



Abstract
1. Introduction
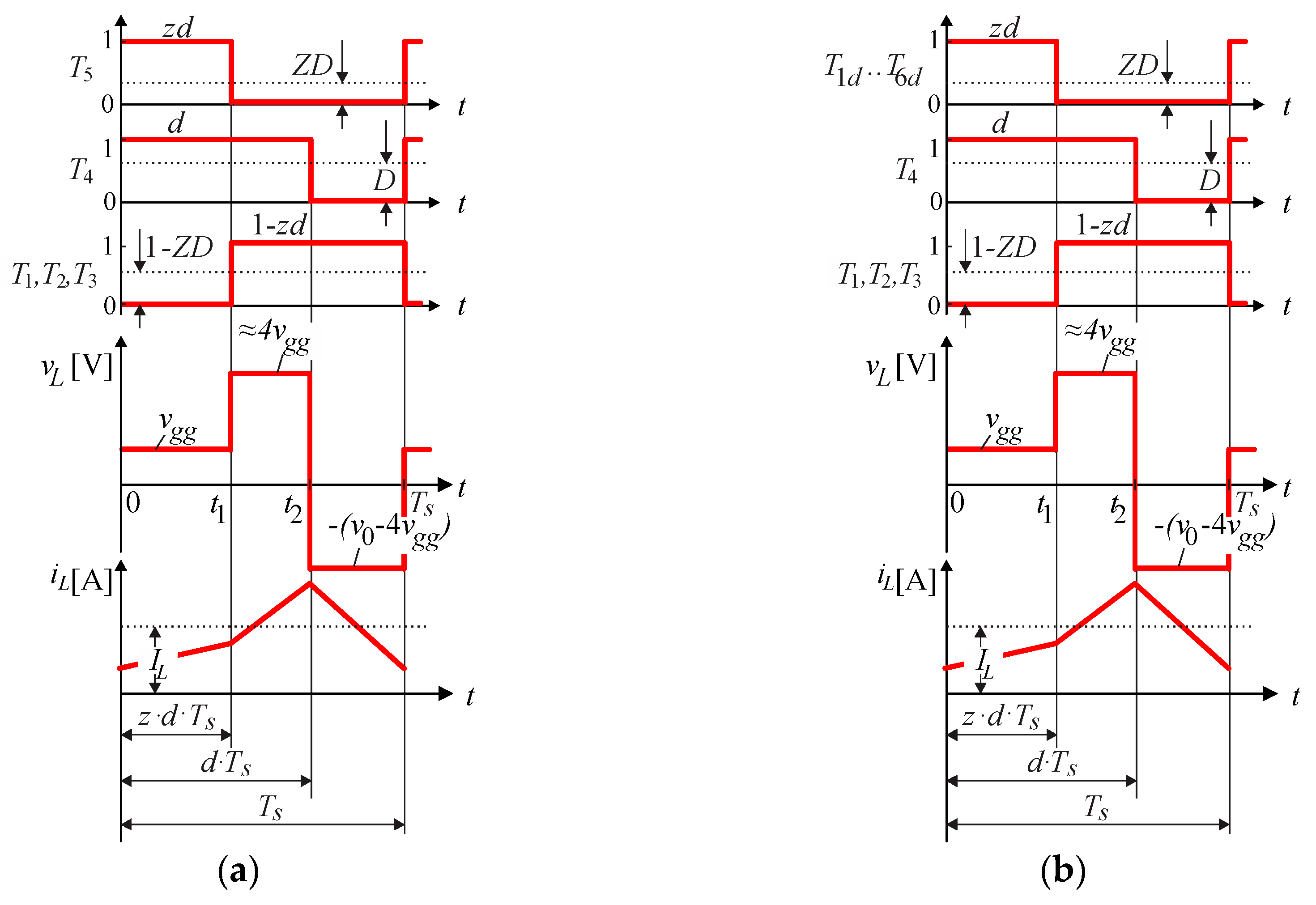
2. Principle of Operation
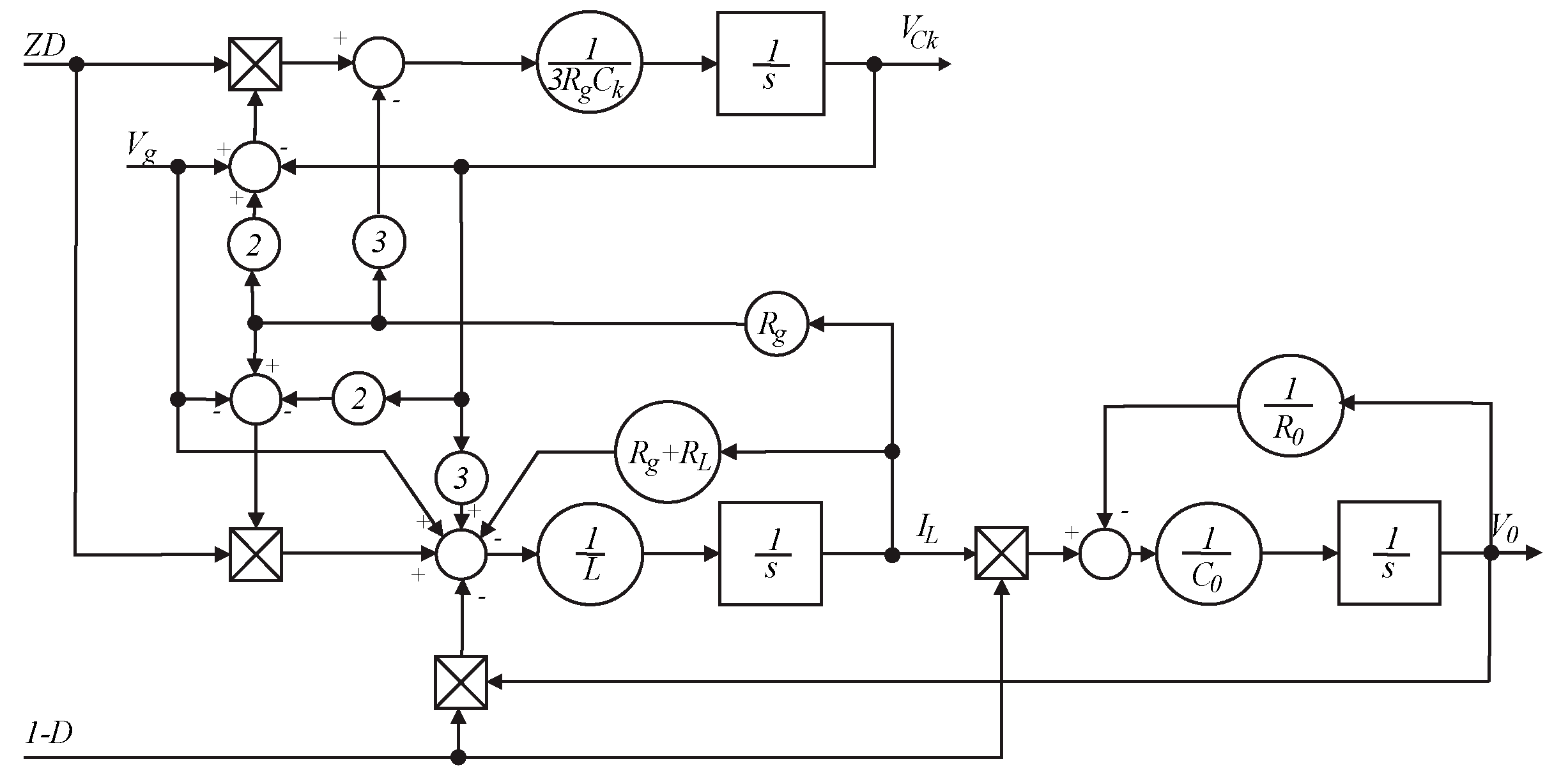
3. SC-BC Modelling
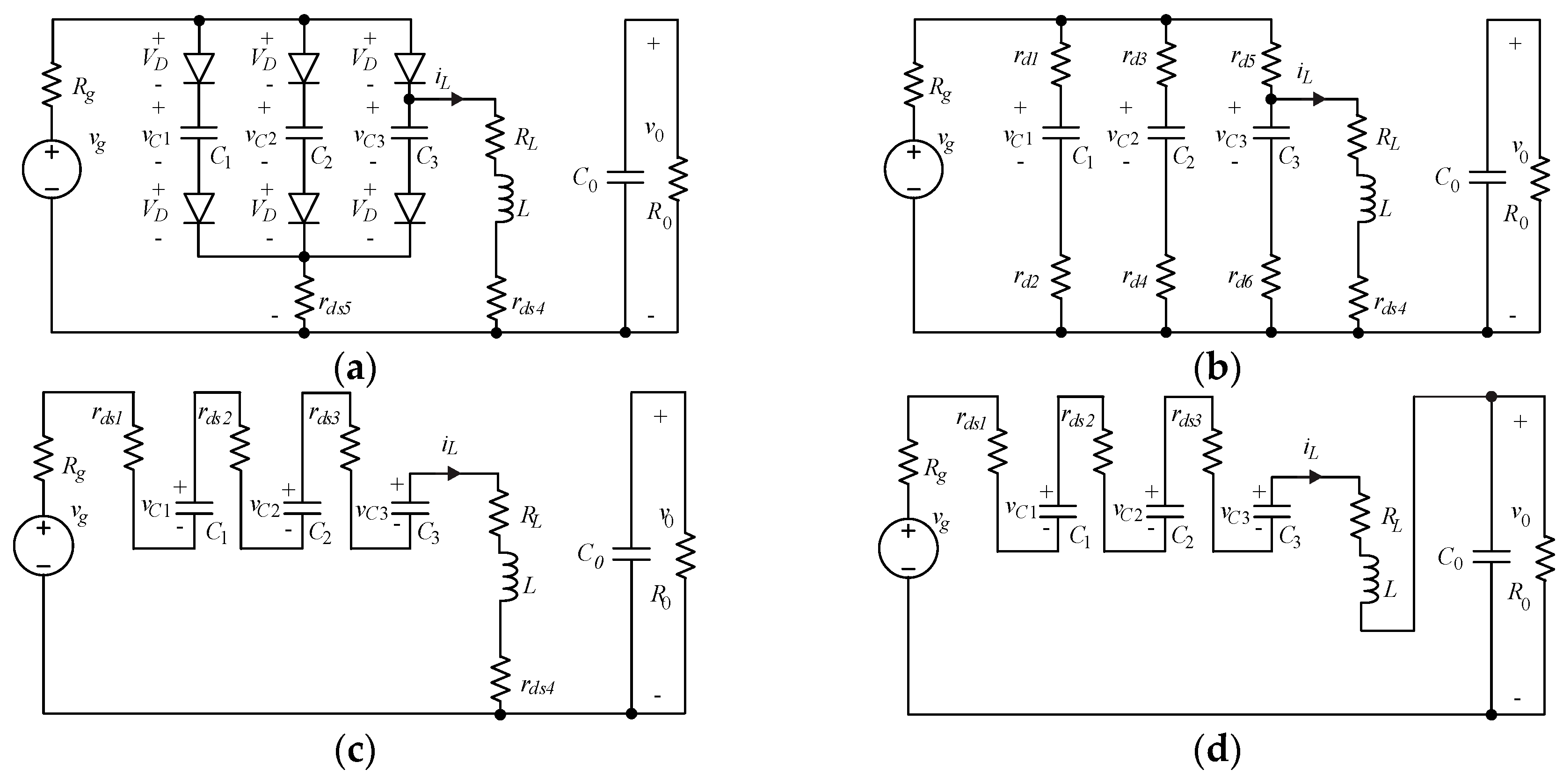
3.1. Mathematical Analysis of Diode Based SC-BC
3.2. Mathematical Analysis of MOSFET Based SC-BC
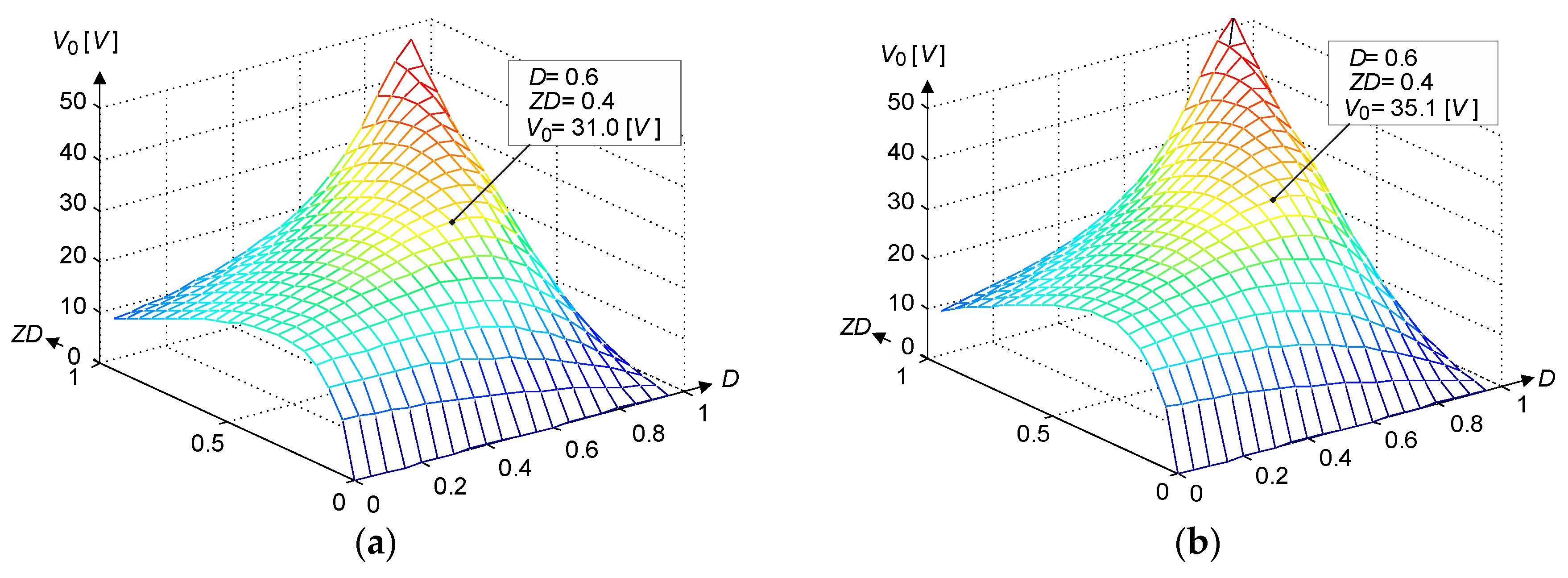
4. SC-BC Gain Characteristics
5. Choice of SC-BC Passive Elements
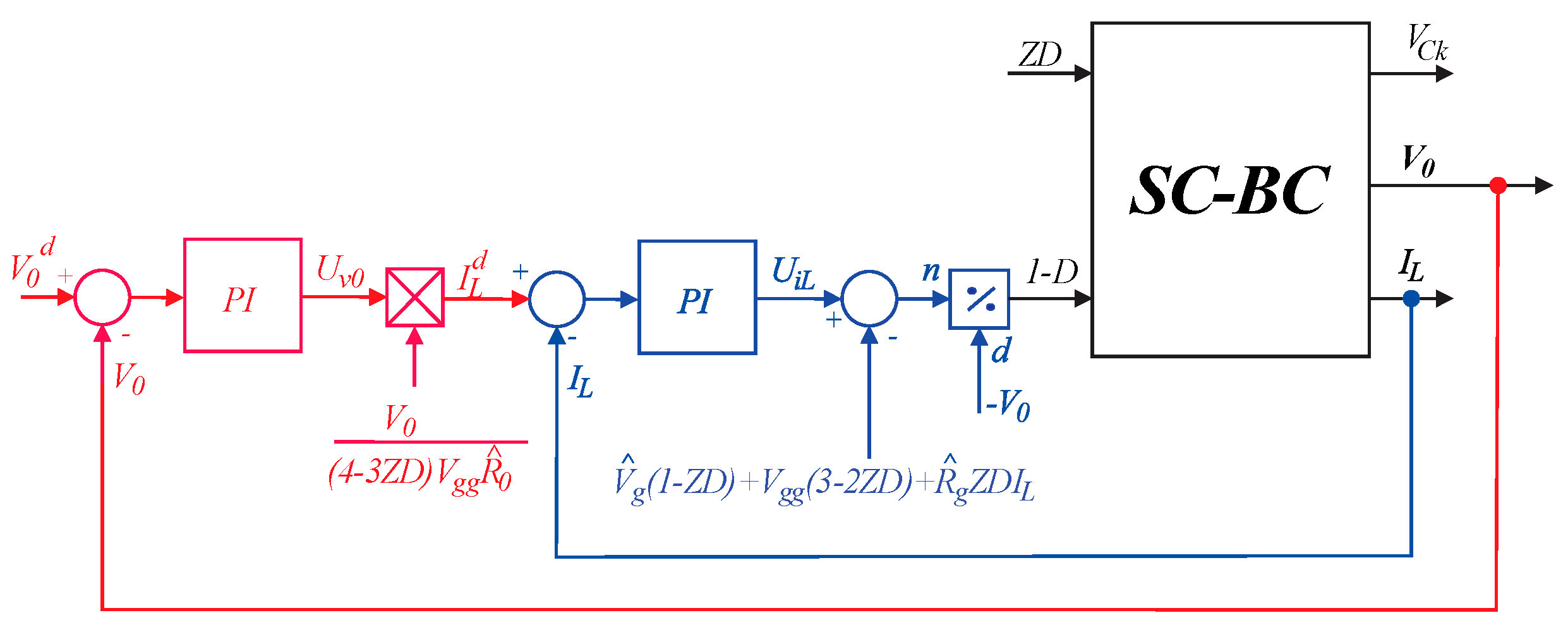
6. Control Algorithm
6.1. Control of Inductor Current IL
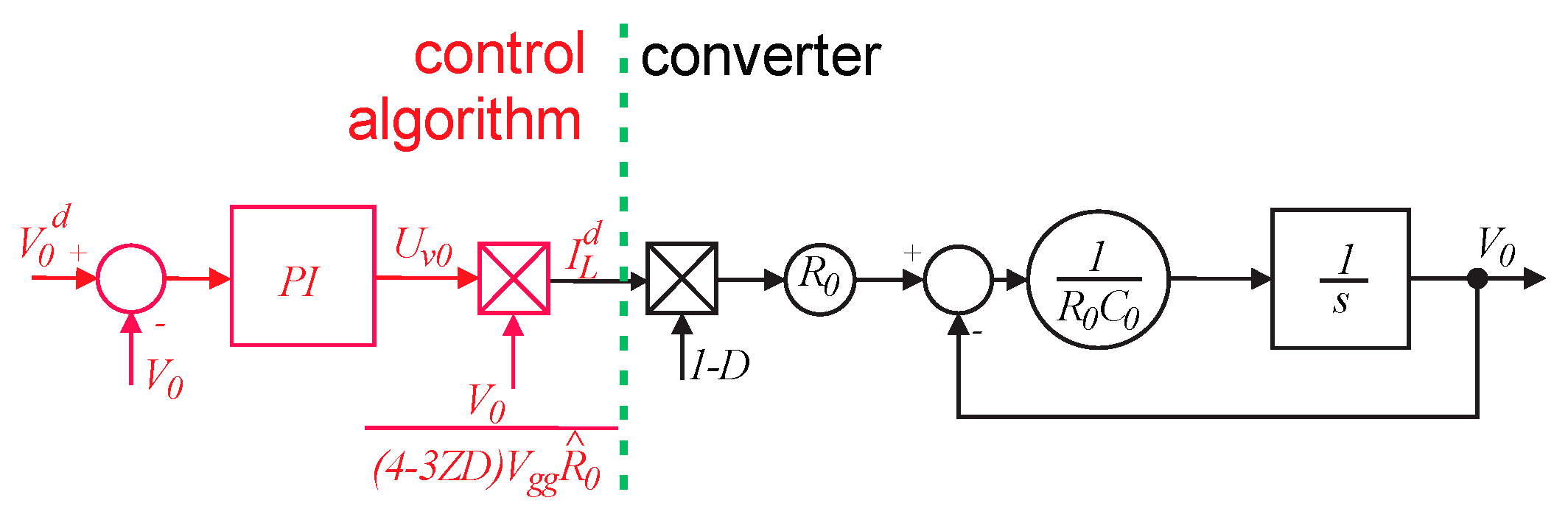
6.2. Control of Output Voltage V0
7. Results
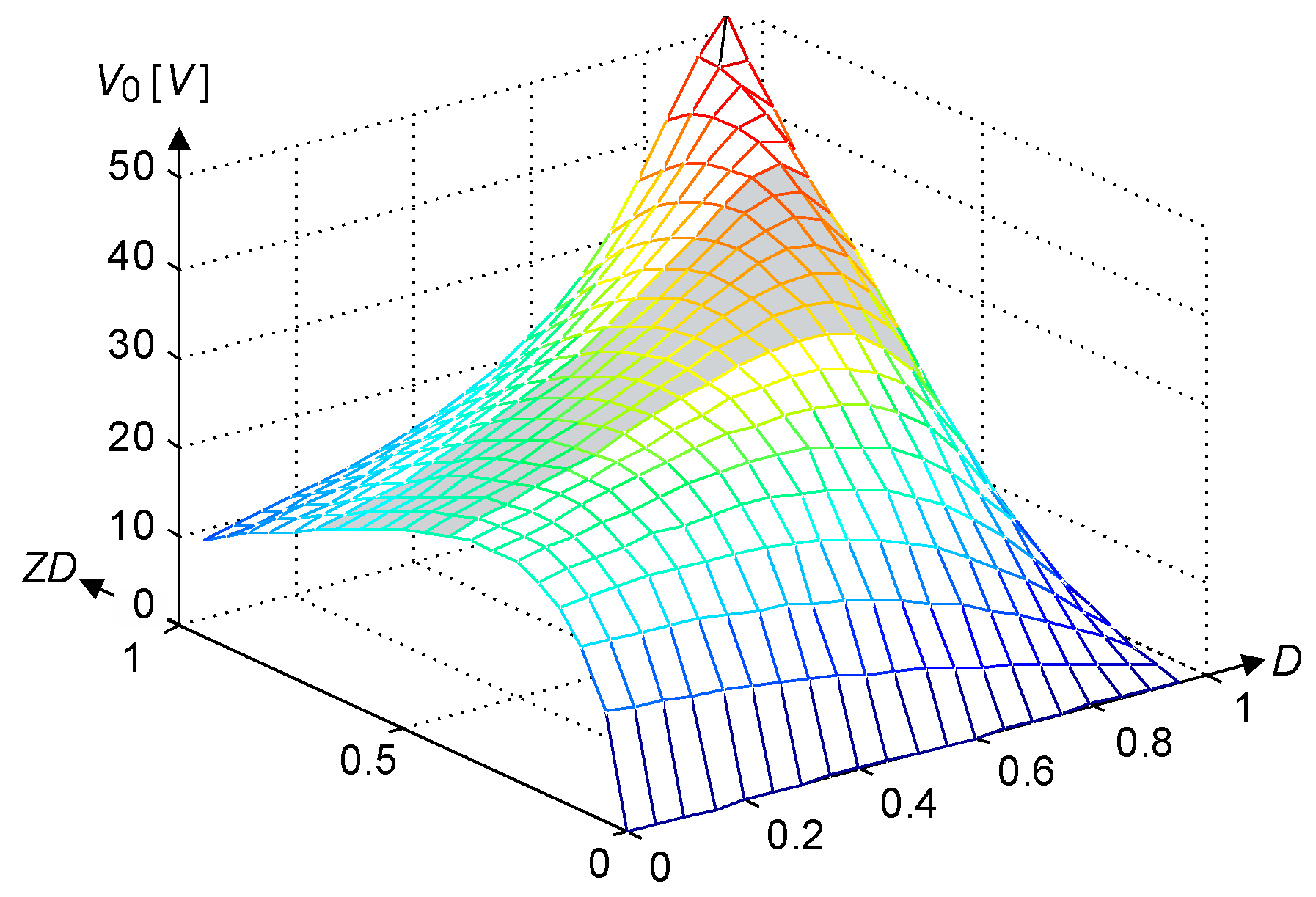
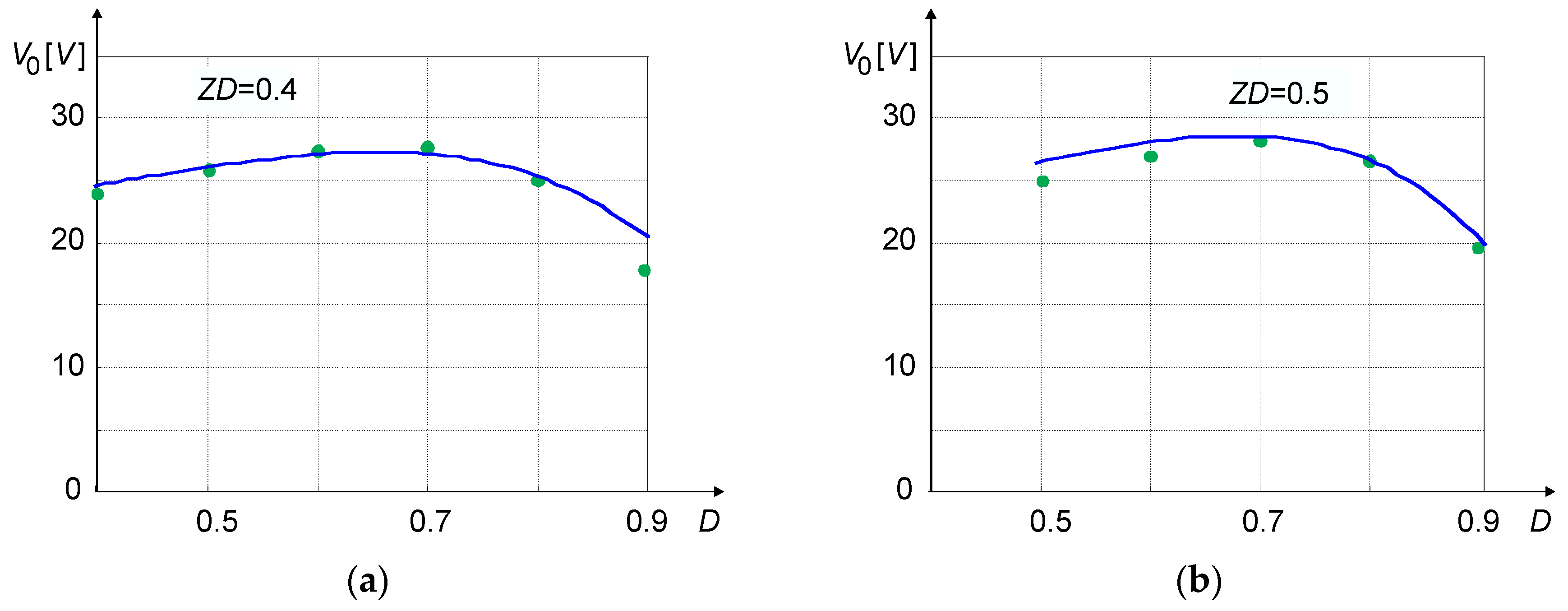
7.1. Verification of Gain Characteristics
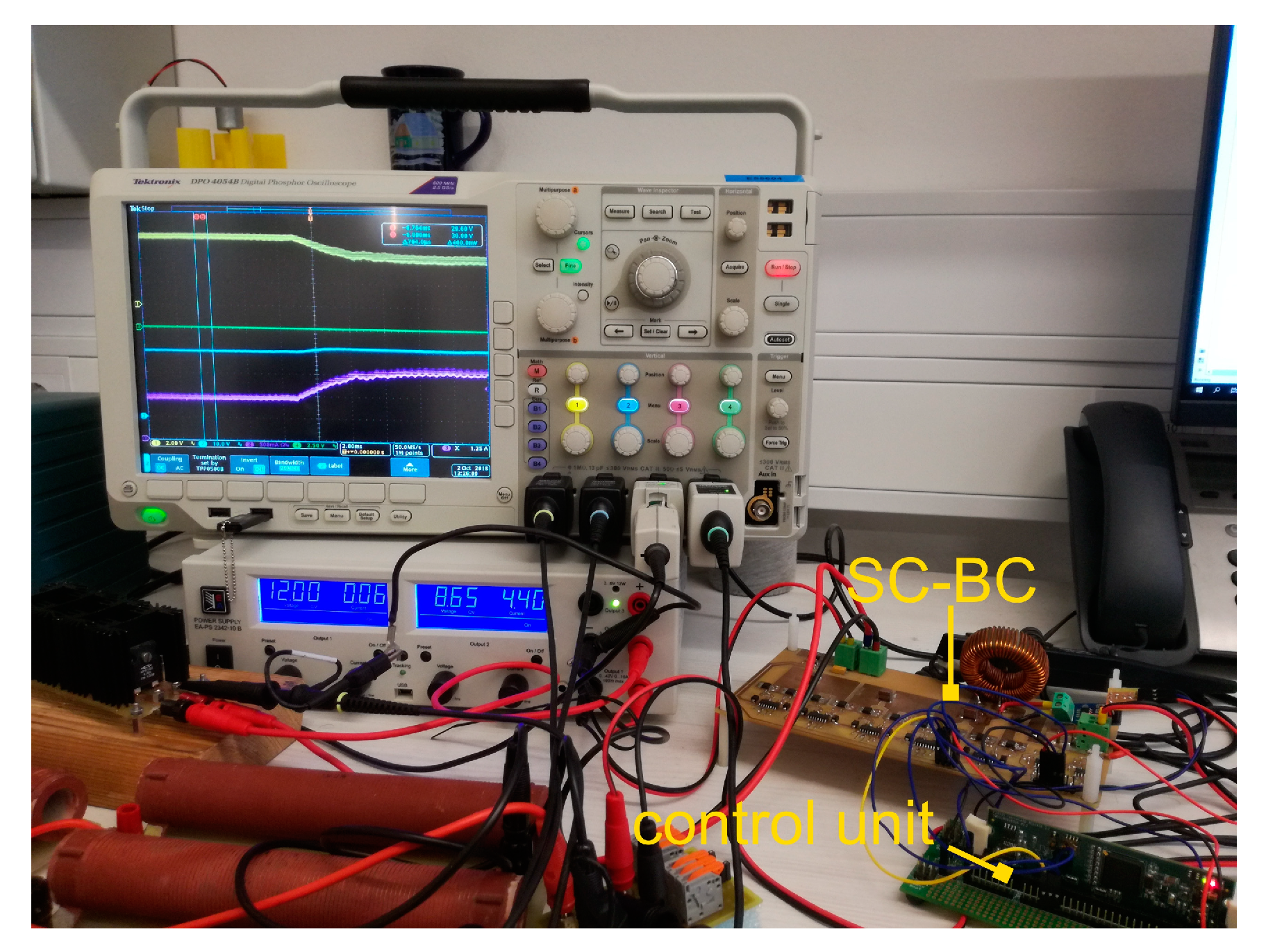
7.2. Control Algorithm Verification, Simulation and Experimentation
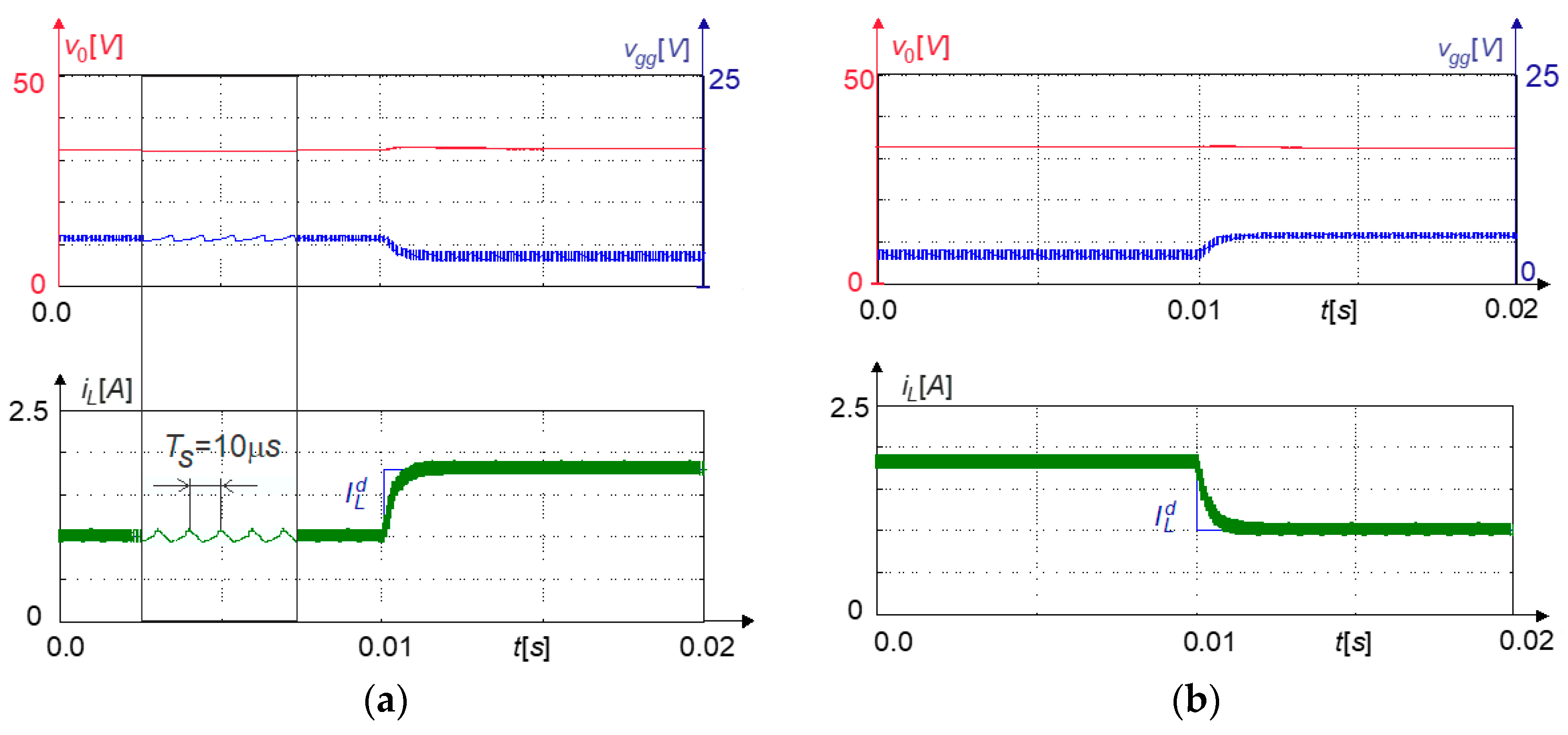
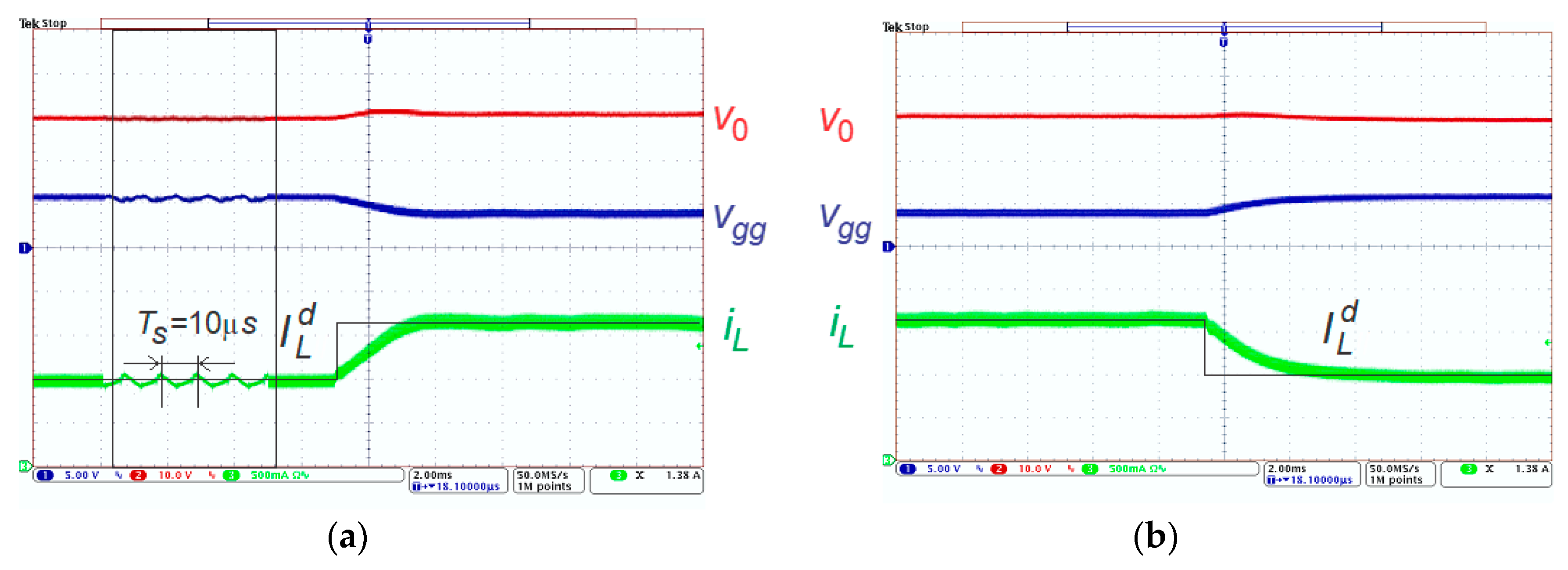
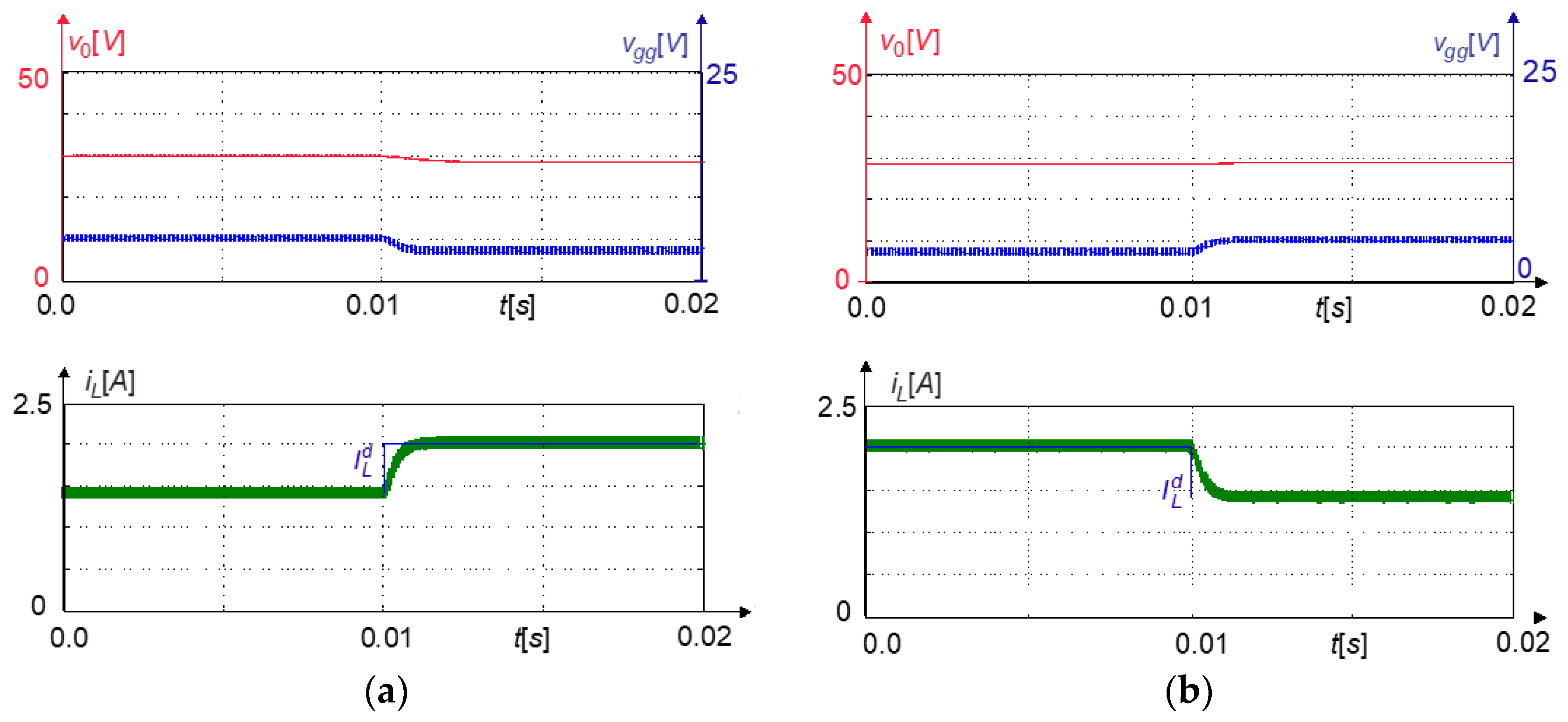
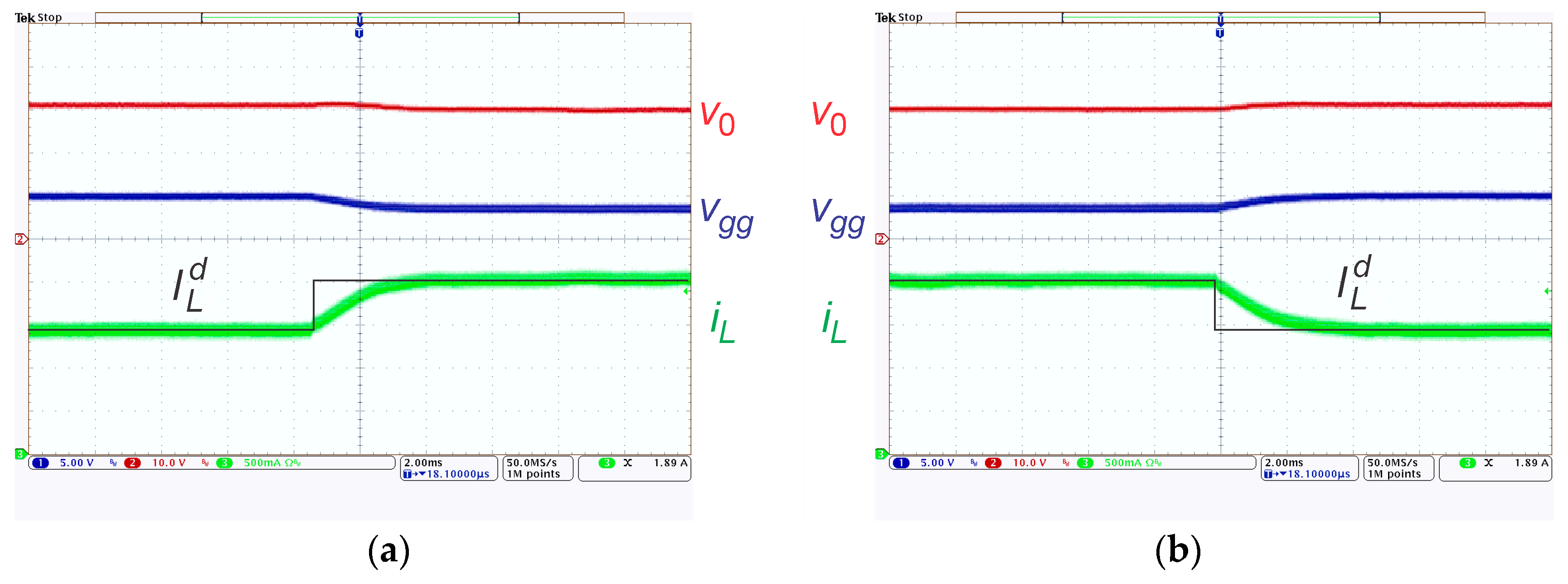
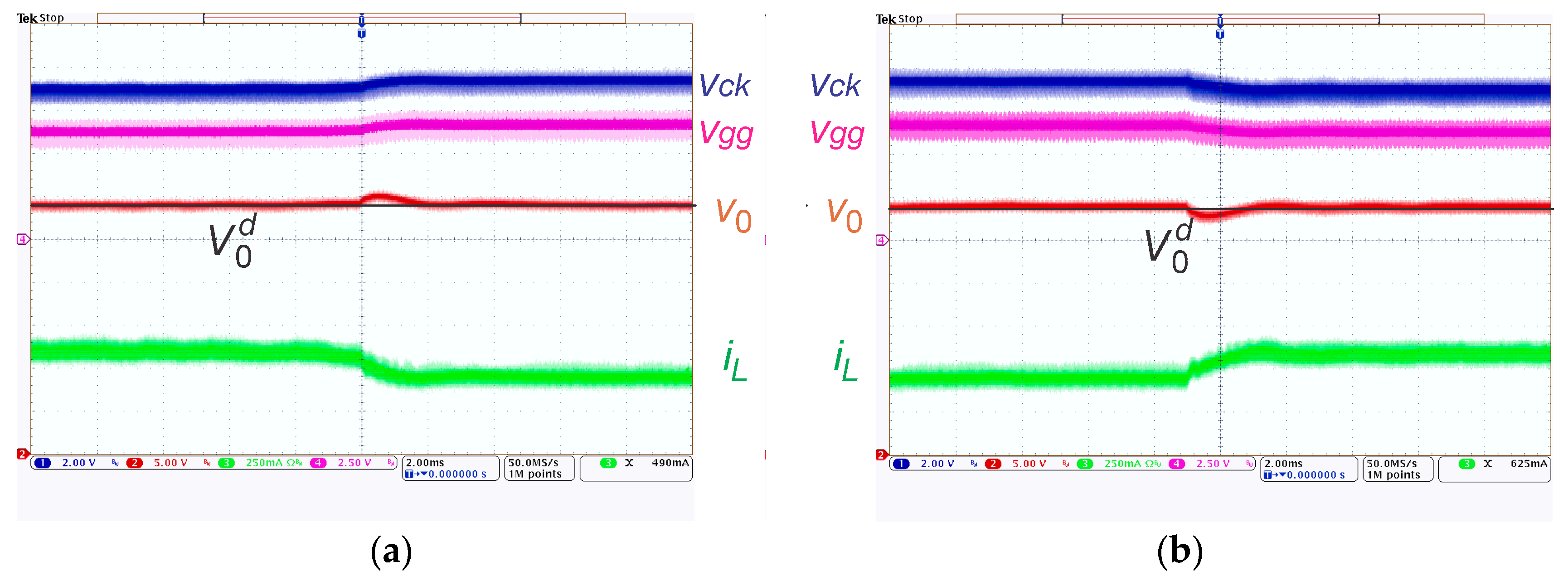
7.2.1. Inductor Current Control
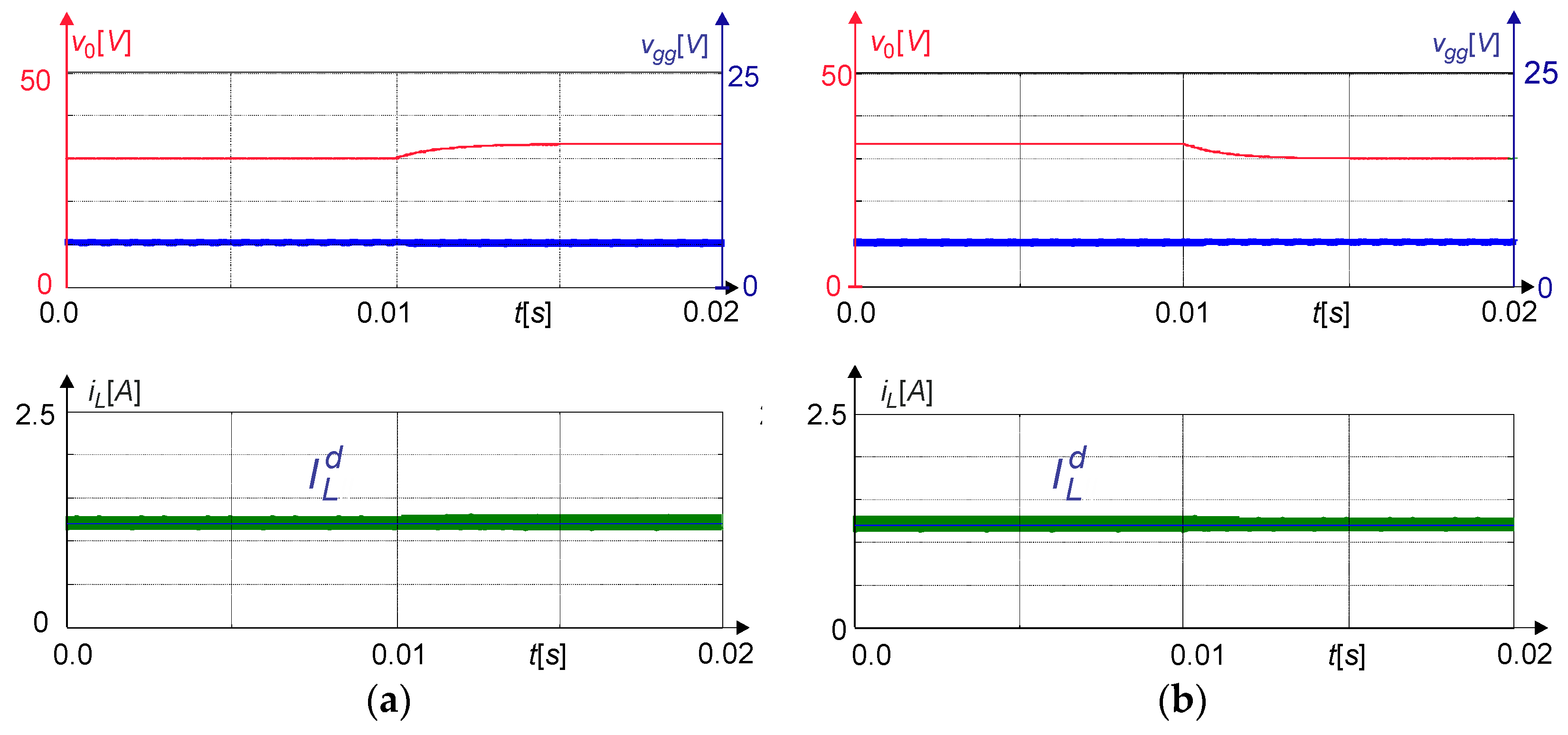
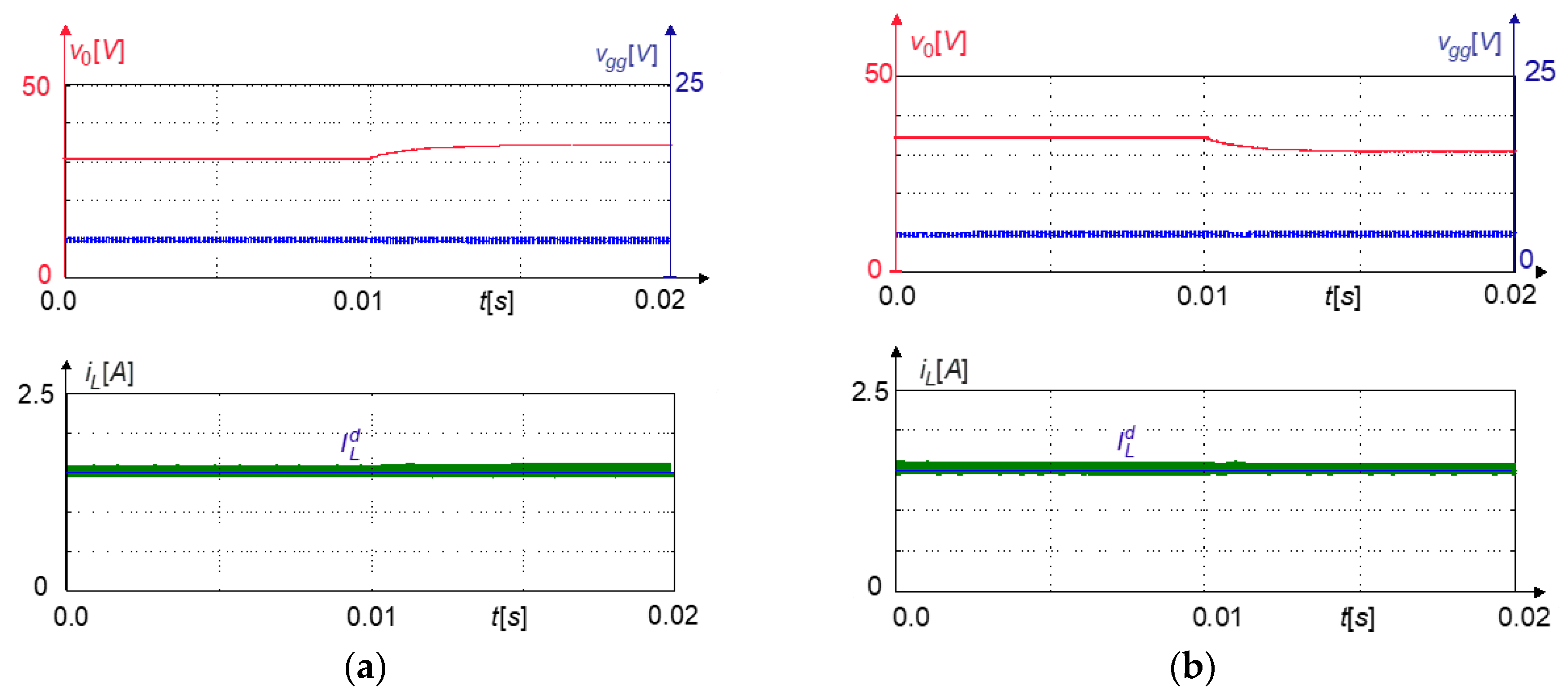
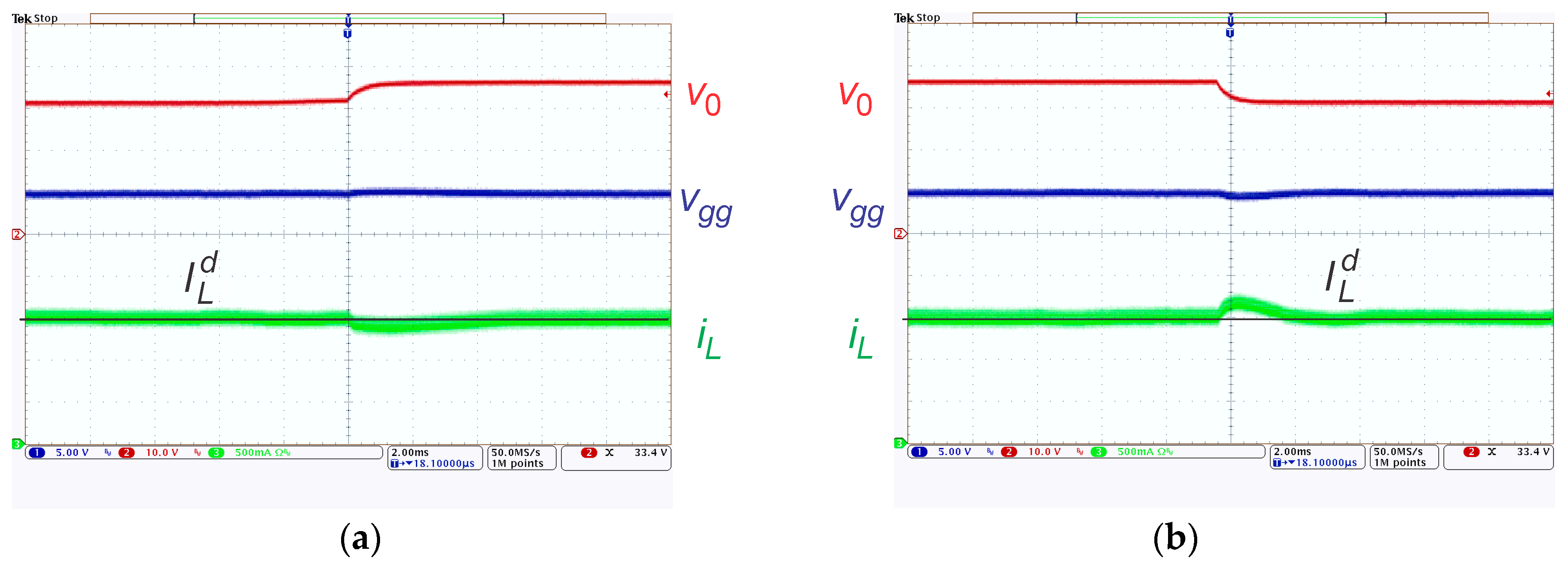
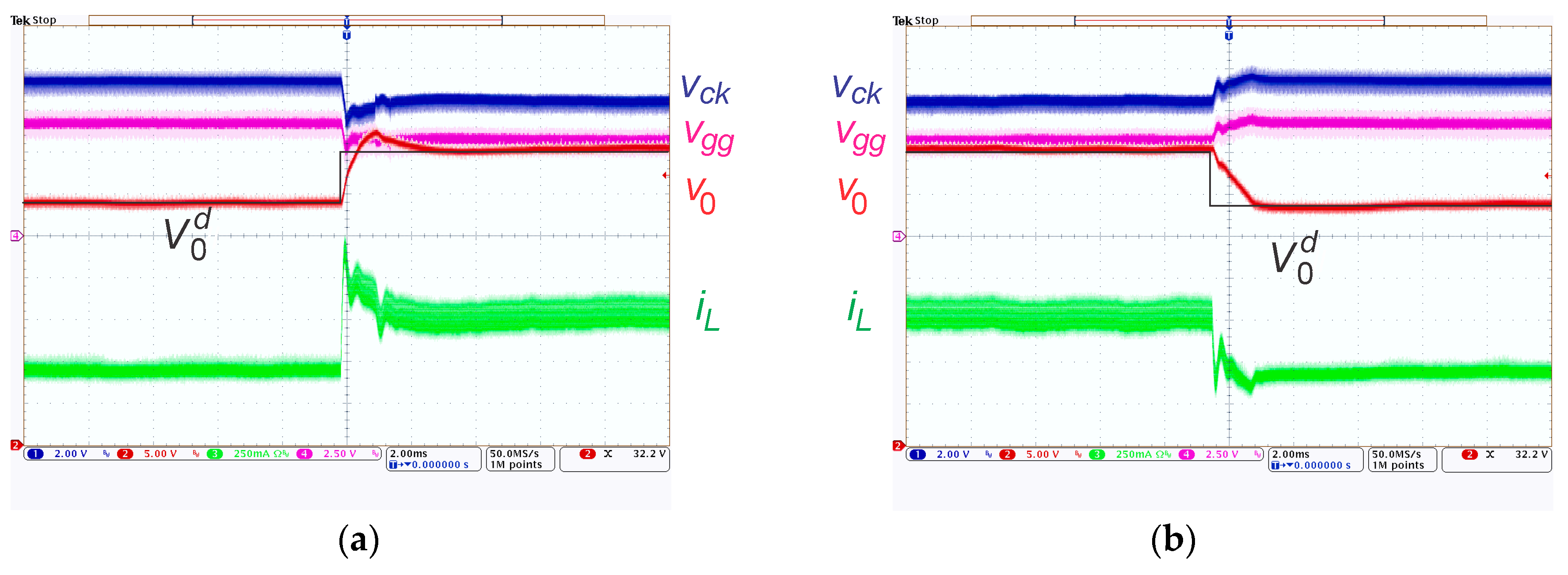
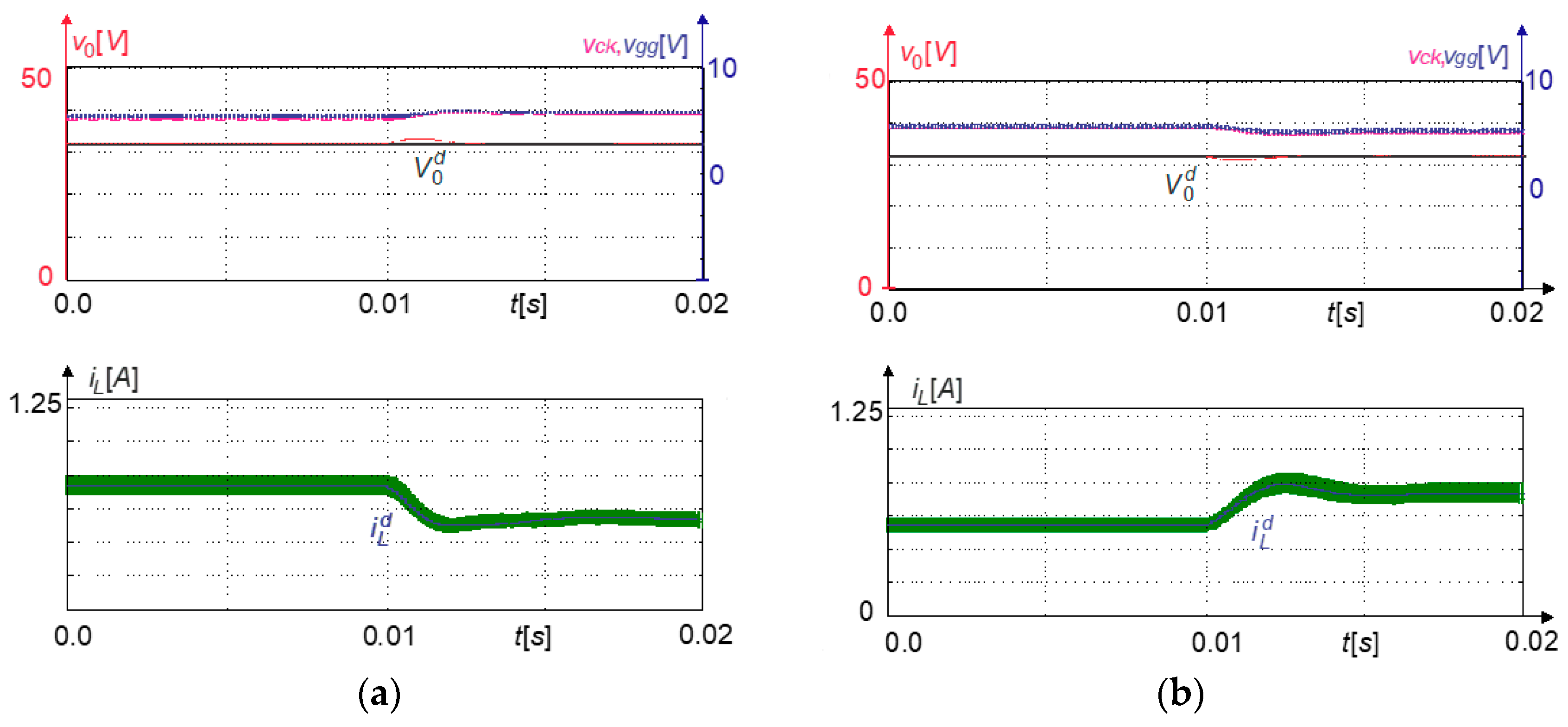
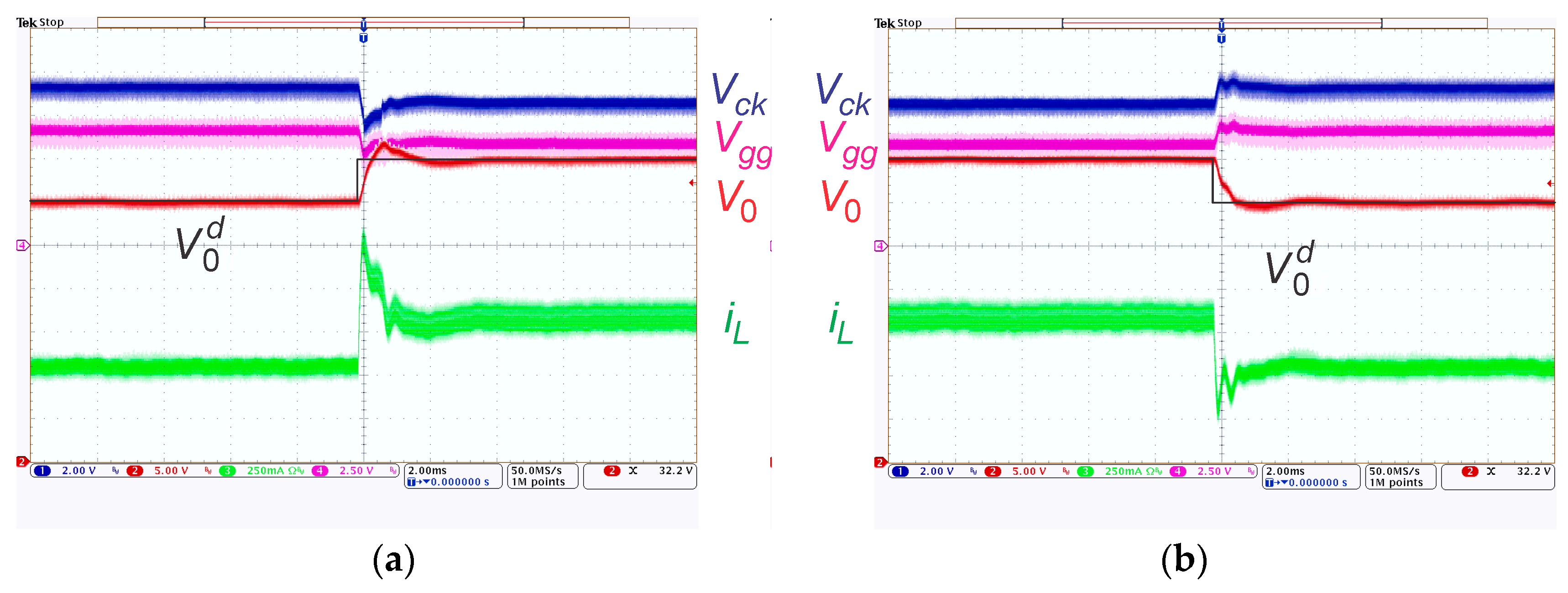
7.2.2. Output Voltage Control
8. Discussion
- Only one inductor is used and no transformers,
- MOSFETs are used in place of diodes as switching elements, resulting in low conduction losses,
- Duty cycles are not overlong,
- The switching-capacitor stage can be integrated.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Acronyms | |
| BS | Boost Stage |
| CCM | Continuous Conduction Mode |
| DC | Direct Current |
| DC-DC | Direct Current-Direct Current |
| DCM | Discontinuous Conduction Mode |
| ESR | Equivalent Series Resistance of capacitor |
| MOSFET | Metal-Oxide-Semiconductor Field-Effect Transistor |
| MPPT | Maximum Power Point Tracking |
| PI | Proportional-Integral |
| PV | Photovoltaic |
| PWM | Pulse Width Modulation |
| SC | Switched-Capacitor |
| SC-BC | Switched-Capacitor-Boost Converter |
| SOC | System On Chip |
| TEG | Thermoelectric generator |
| Nomenclature | |
| converter static gain | |
| output capacitance | |
| capacitances of switched capacitors | |
| capacitance of switched capacitors | |
| d | duty-cycle function over the interval |
| D | average value of duty-cycle function over the interval |
| maximal value of duty cycle | |
| minimal value of duty cycle | |
| switching frequency of the converter | |
| converter input current | |
| average value of converter input current over the interval | |
| inductor current | |
| average value of inductor current iL over the interval | |
| Laplace transform of | |
| desired value of inductor current | |
| average value of desired value of inductor current over the interval | |
| Laplace transform of | |
| IL,max | maximal value of inductor current (current ripple) |
| IL,min | minimal value of inductor current (current ripple) |
| output current | |
| average value of output current iR0 over the interval | |
| Laplace transform of | |
| L | inductance of the boost stage inductor |
| output (load) resistance | |
| MOSFET drain-source on resistance of transistors | |
| MOSFET drain-source on resistance of transistors | |
| MOSFET drain-source on resistance | |
| inner TEG resistance | |
| resistance of the boost stage inductor | |
| t | time |
| sample time interval | |
| linear feedback inductor current controller output | |
| average value of linear feedback inductor current controller output over the interval | |
| Laplace transform of | |
| linear feedback output voltage controller output | |
| average value of linear feedback output voltage controller output over the interval | |
| Laplace transform of | |
| linear feedback switched capacitor voltage controller output | |
| average value of linear feedback switched capacitor voltage controller output over the interval | |
| Laplace transform of | |
| output voltage | |
| average value of output voltage over the interval | |
| Laplace transform of | |
| desired value of the output voltage | |
| average value of desired value of the output voltage over the interval | |
| Laplace transform of | |
| v0,max | maximal value of output voltage (voltage ripple) |
| v0,min | minimal value of output voltage (voltage ripple) |
| switched capacitor voltage | |
| average value of switched capacitor voltage over the interval | |
| Laplace transform of | |
| desired value of the switched capacitor voltage | |
| average value of desired value of the switched capacitor voltage over the interval | |
| Laplace transform of | |
| diode forward voltage | |
| open terminal TEG voltage | |
| average value of open terminal TEG voltage over the interval | |
| SC_BC input terminal voltage | |
| SC_BC input terminal voltage over the interval | |
| input of the boost stage of SC-BC, average value over the interval | |
| inductor voltage | |
| energy stored in inductor L | |
| energy stored in capacitor | |
| z | switched capacitors charging duty cycle over the interval |
| Z | average value of the switched capacitors charging duty cycle over the interval |
| inductor current ripple | |
| output voltage ripple | |
| ε | maximal distance between measurement points and theoretical calculated curve |
References
- Chandrasekar, M.; Suresh, S.; Senthilkumar, T.; Ganesh Karthikeyan, M. Passive cooling of standalone flat PV module with cotton wick structures. Energy Convers. Manag. 2013, 71, 43–50. [Google Scholar] [CrossRef]
- Wang, C.; Chen, W.; Shao, S.; Chen, Z.; Zhu, B.; Li, H. Energy management of standalone hybrid PV system. Energy Procedia 2011, 12, 471–479. [Google Scholar] [CrossRef]
- Gentle, A.R.; Smith, G.B. Is enhanced radiative cooling of solar cell modules worth pursuing? Sol. Energy Mater. Sol. Cells 2016, 150, 39–42. [Google Scholar] [CrossRef]
- Chandrasekar, M.; Senthilkumar, T. Passive thermal regulation of flat PV modules by coupling the mechanisms of evaporative and fin cooling. Heat Mass Transf. 2016, 52, 1381. [Google Scholar] [CrossRef]
- Yang, D.; Yin, H. Energy Conversion Efficiency of a Novel Hybrid Solar System for Photovoltaic, Thermoelectric, and Heat Utilization. IEEE Trans. Energy Convers. 2011, 26, 662–670. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Jin, Y. Analysis of the Primary Constraint Conditions of an Efficient Photovoltaic-Thermoelectric Hybrid System. Energies 2017, 10, 20. [Google Scholar] [CrossRef]
- Narducci, D.; Lorenzi, B. Challenges and perspectives in tandem thermoelectric-photovoltaic solar energy conversion. IEEE Trans Nanotechnol. 2016, 15, 348–355. [Google Scholar] [CrossRef]
- Petucco, A.; Saggini, S.; Corradini, L.; Mattavelli, P. Analysis of power processing architectures for thermoelectric energy harvesting. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1036–1049. [Google Scholar] [CrossRef]
- Shen, C.-L.; Chen, H.-Y.; Chiu, P.-C. Integrated Three-Voltage-Booster DC-DC Converter to Achieve High Voltage Gain with Leakage-Energy Recycling for PV or Fuel-Cell Power Systems. Energies 2015, 8, 9843–9859. [Google Scholar] [CrossRef]
- Wong, Y.-S.; Chen, J.-F.; Liu, K.-B.; Hsieh, Y.-P. A Novel High Step-Up DC-DC Converter with Coupled Inductor and Switched Clamp Capacitor Techniques for Photovoltaic Systems. Energies 2017, 10, 378. [Google Scholar] [CrossRef]
- Shen, C.-L.; Chiu, P.-C.; Lee, Y.-C. Novel Interleaved Converter with Extra-High Voltage Gain to Process Low-Voltage Renewable-Energy Generation. Energies 2016, 9, 871. [Google Scholar] [CrossRef]
- Leon-Masich, A.; Valderrama-Blavi, H.; Bosque-Moncusí, J.M.; Maixé-Altés, J.; Martínez-Salamero, L. Sliding-Mode-Control-Based Boost Converter for High-Voltage–Low-Power Applications. IEEE Trans. Ind. Electron. 2015, 62, 229–237. [Google Scholar] [CrossRef]
- Luo, F.L.; Ye, H. Advanced DC/DC Converters, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2017; ISBN 978-1498774901. [Google Scholar]
- Luo, F.L.; Ye, H. Super-lift boost converters. IET Power Electron. 2014, 7, 1655–1664. [Google Scholar] [CrossRef]
- Ioinovici, A. Switched-capacitor power electronics circuits. IEEE Circuits Syst. Mag. 2001, 1, 37–42. [Google Scholar] [CrossRef]
- Wu, B.; Li, S.; Smedley, K.M.; Singer, S. Analysis of highpower switched capacitor converter regulation based on charge-balance transient-calculation method. IEEE Trans. Power Electron. 2016, 31, 3482–3494. [Google Scholar] [CrossRef]
- Maksimovic, D.; Ćuk, S. Switching converters with wide DC conversion range. IEEE Trans. Power Electron. 1991, 6, 151–157. [Google Scholar] [CrossRef]
- Wijeratne, D.S.; Moschopoulos, G. Quadratic Power Conversion for Power Electronics: Principles and Circuits. IEEE Trans. Circuits Syst. Regul. Pap. 2012, 59, 426–438. [Google Scholar] [CrossRef]
- Loera-Palomo, R.; Morales-Saldana, J.A. Family of quadratic step-up dc–dc converters based on non-cascading structures. IET Power Electron. 2015, 8, 793–801. [Google Scholar] [CrossRef]
- Divya Navamani, J.; Vijayakumar, K.; Jegatheesan, R. Non-isolated high gain DC-DC converter by quadratic boost converter and voltage multiplier cell. Ain Shams Eng. J. 2016. [Google Scholar] [CrossRef]
- Axelrod, B.; Berkovich, Y.; Ioinovici, A. Switched-Capacitor/Switched-Inductor Structures for Getting Transformerless Hybrid DC–DC PWM Converters. IEEE Trans. Circuits Syst. Regul. Pap. 2008, 55, 687–696. [Google Scholar] [CrossRef]
- Tran, V.-T.; Nguyen, M.-K.; Choi, Y.-O.; Cho, G.-B. Switched-Capacitor-Based High Boost DC-DC Converter. Energies 2018, 11, 987. [Google Scholar] [CrossRef]
- Nguyen, M.; Duong, T.; Lim, Y. Switched-Capacitor-Based Dual-Switch High-Boost DC–DC Converter. IEEE Trans. Power Electron. 2018, 33, 4181–4189. [Google Scholar] [CrossRef]
- Padmanaban, S.; Bhaskar, M.S.; Maroti, P.K.; Blaabjerg, F.; Fedák, V. An Original Transformer and Switched-Capacitor (T & SC)-Based Extension for DC-DC Boost Converter for High-Voltage/Low-Current Renewable Energy Applications: Hardware Implementation of a New T & SC Boost Converter. Energies 2018, 11, 783. [Google Scholar] [CrossRef]
- Chen, S.-J.; Yang, S.-P.; Huang, C.-M.; Chou, H.-M.; Shen, M.-J. Interleaved High Step-Up DC-DC Converter Based on Voltage Multiplier Cell and Voltage-Stacking Techniques for Renewable Energy Applications. Energies 2018, 11, 1632. [Google Scholar] [CrossRef]
- Abutbul, A.; Gherlitz, A.Y.; Berkovich, Y.; Ioinovici, A. Step-Up Switching-Mode Converter With High Voltage Gain Using a Switched-Capacitor Circuit. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2003, 50, 1098–1102. [Google Scholar] [CrossRef]
- Maruša, L.; Milanovič, M.; Valderrama-Blavi, H. Evaluating a Switched Capacitor-Boost Converter (SC-BC) for energy harvesting in a Peltier-cells thermoelectric system. In Proceedings of the Electrical Drives and Power Electronics Conference (EDPE), Tatranska Lomnica, Slovakia, 21–23 September 2015. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prantice-Hall: Englewood Cliffs, NJ, USA, 1991; ISBN 978-0130408907. [Google Scholar]
- Dodds, S.J. Feedback Control; Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2015; ISBN 978-1-4471-6674-0. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converter, Application and Design, 3rd ed.; John Wiley & Sons: New York, NY, USA, 2007; ISBN 978-8126510900. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ZD = 0.4 | ZD = 0.5 | |
|---|---|---|
| D | V0 (V) | V0 (V) |
| 0.40 | 24.00 | - |
| 0.50 | 25.90 | 24.90 |
| 0.60 | 27.47 | 26.93 |
| 0.70 | 27.75 | 28.20 |
| 0.80 | 25.10 | 26.55 |
| 0.90 | 17.82 | 19.60 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodič, M.; Milanovič, M.; Truntič, M.; Ošlaj, B. Switched-Capacitor Boost Converter for Low Power Energy Harvesting Applications. Energies 2018, 11, 3156. https://doi.org/10.3390/en11113156
Rodič M, Milanovič M, Truntič M, Ošlaj B. Switched-Capacitor Boost Converter for Low Power Energy Harvesting Applications. Energies. 2018; 11(11):3156. https://doi.org/10.3390/en11113156
Chicago/Turabian StyleRodič, Miran, Miro Milanovič, Mitja Truntič, and Benjamin Ošlaj. 2018. "Switched-Capacitor Boost Converter for Low Power Energy Harvesting Applications" Energies 11, no. 11: 3156. https://doi.org/10.3390/en11113156
APA StyleRodič, M., Milanovič, M., Truntič, M., & Ošlaj, B. (2018). Switched-Capacitor Boost Converter for Low Power Energy Harvesting Applications. Energies, 11(11), 3156. https://doi.org/10.3390/en11113156