
Radiation Mapping: A Gaussian Multi-Kernel Weighting Method for Source Investigation in Disaster Scenarios

Abstract
1. Introduction
- (1)
- Sparse or incomplete sampling: Obstacle-constrained navigation paths result in a non-uniform spatial distribution of measurement points and the potential omission of critical survey locations.
- (2)
- Radiation field distortion: Variability in obstacle types and material thicknesses introduces significant radiation attenuation effects, leading to distortions in the spatial distribution of the original radiation field.
- (3)
- Modeling methodology constraints: Existing interpolation algorithms lack robust integration mechanisms for incorporating material-specific attenuation coefficients, resulting in systematic discrepancies between reconstructed radiation maps and actual environmental measurements.
2. Multi-Kernel Weighted Gaussian Process for Obstacle Attenuation Modeling
2.1. Gaussian Theory Framework
2.2. Kernel Functions of Common Obstacles in Radiation Fields
2.3. Comparison of Different Interpolation Methods in Obstacle Environments
3. Radiation Distribution Mapping Experiment
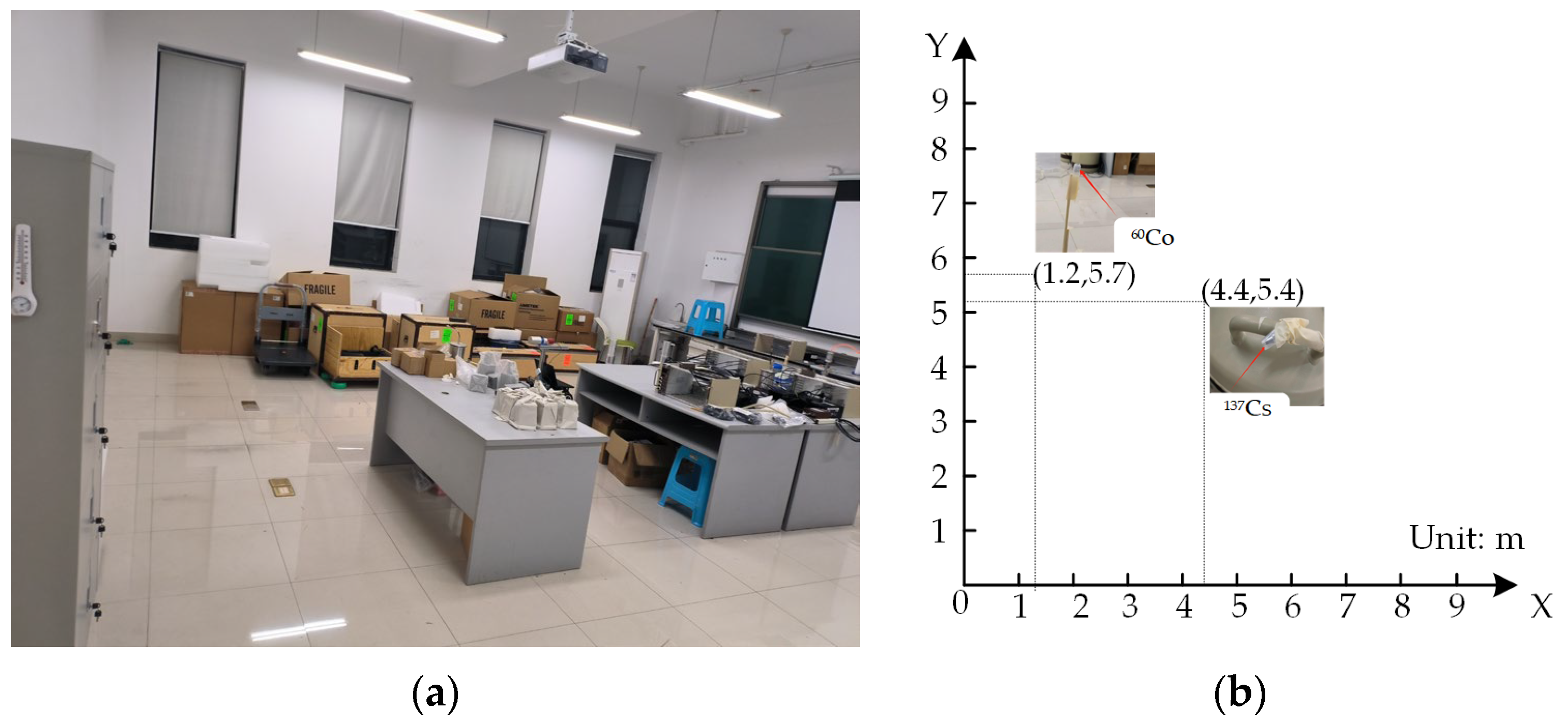
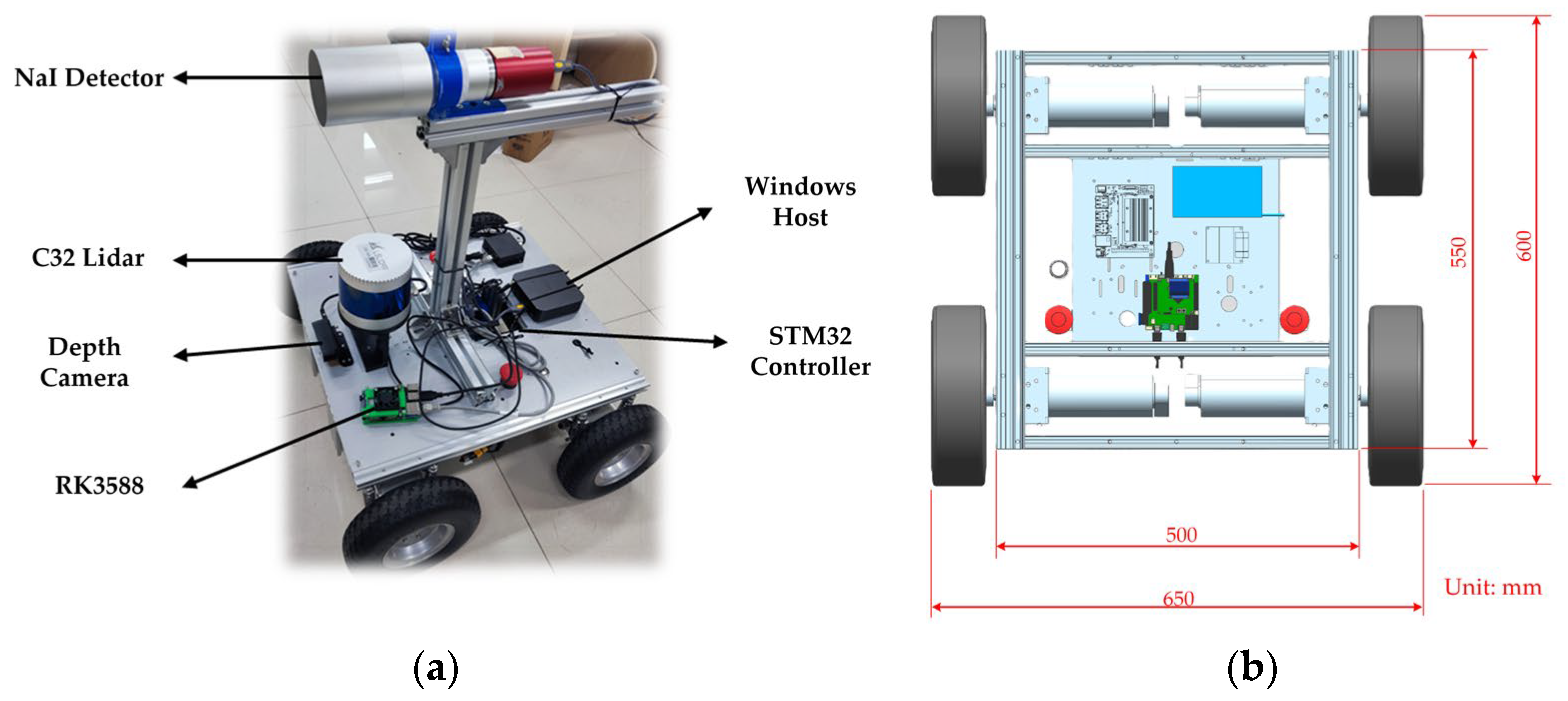
3.1. Experimental Setup for Radiation Mapping
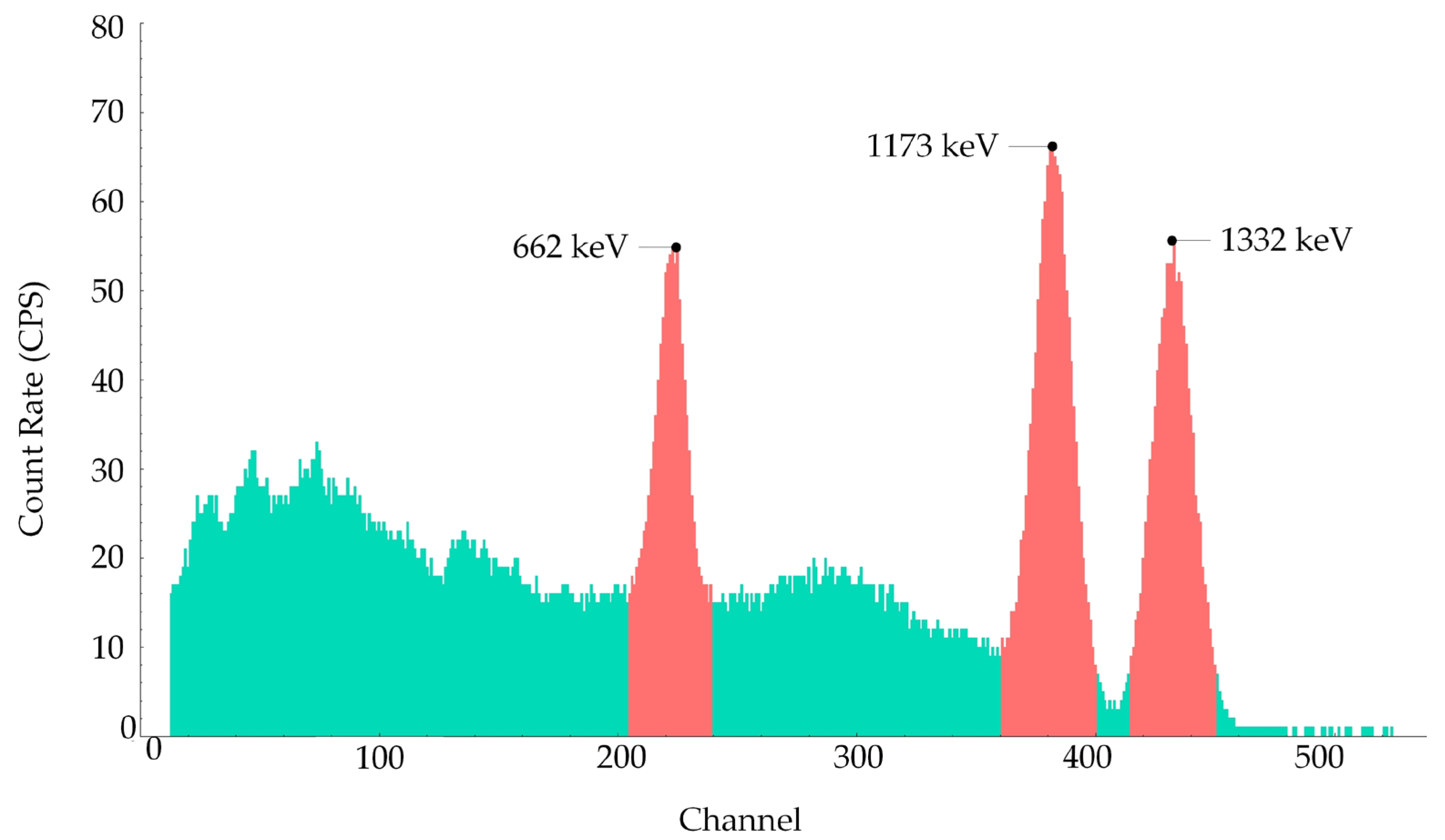
3.2. Collection of Sensor and Radiation Data
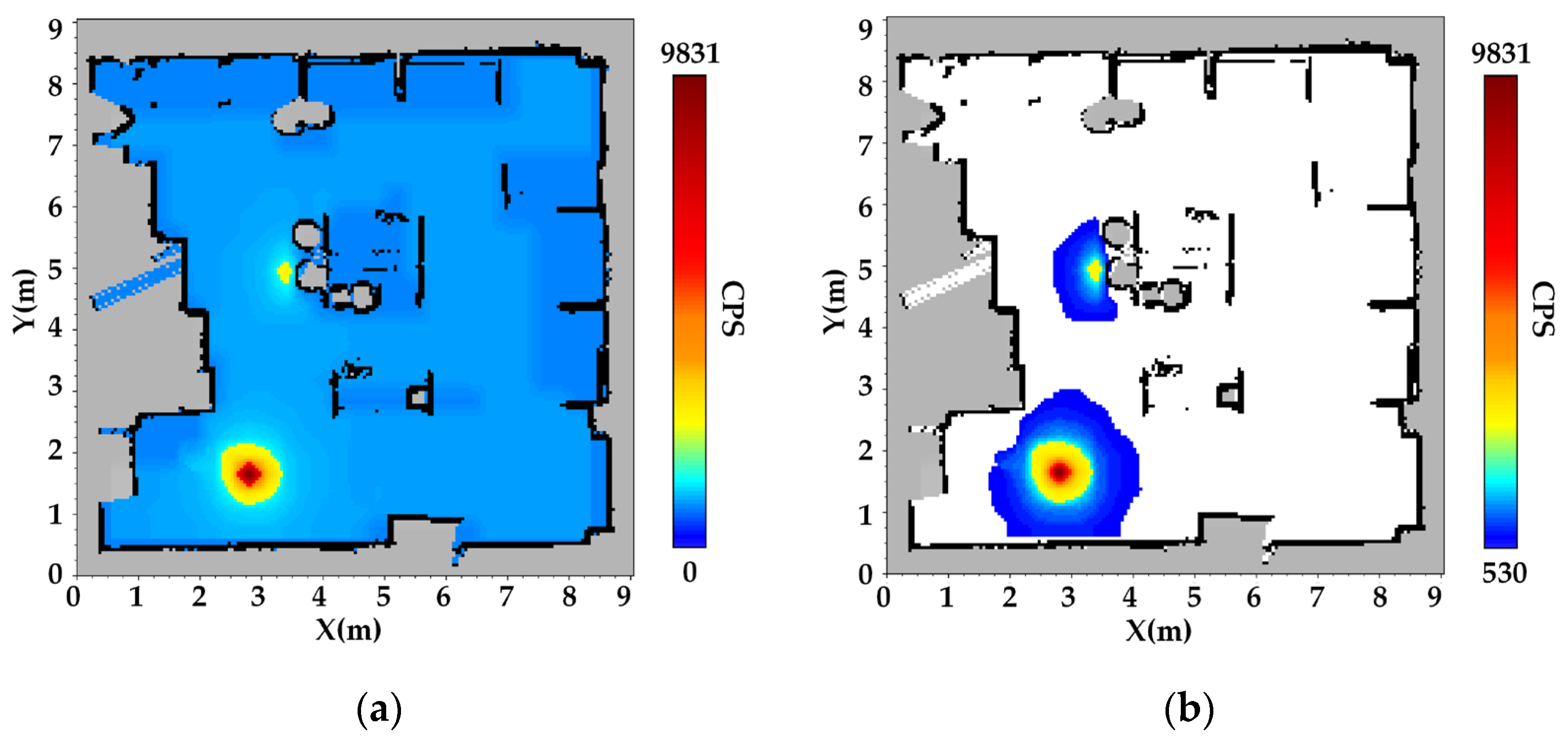
3.3. Construction and Analysis of the Radiation Field Map
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abd Rahman, N.A.; Sahari, K.S.M.; Taat, M.Z.; Lombigit, L.; Abdullah, N.A.; Aziz, N.; Ramli, N.; Soh, S.C.; Ghazali, M.I.M.; Baharuddin, M.Z. Design and Integration of a Radiation Detector Module for Robot Operating System (ROS). IOP Conf. Ser. Mater. Sci. Eng. 2024, 1308, 012007. [Google Scholar] [CrossRef]
- Ramli, N.; Abd Rahman, N.A.; Ghazali, M.I.M.; Sarowi, S.M.; Taat, M.Z.; Hasnulhadi, A.; Soh, S.C.; Lombigit, L.; Abdullah, N.A.; Aziz, N.F.H.A. Preliminary Results of the Autonomous Radiation Mapping in Malaysian Nuclear Agency. IOP Conf. Ser. Mater. Sci. Eng. 2024, 1308, 012005. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Smith, R.; Cucco, E.; Fairbairn, C. Robotic development for the nuclear environment: Challenges and strategy. Robotics 2020, 9, 94. [Google Scholar] [CrossRef]
- Madzhidov, A.I.; Dmitrenko, V.V.; Ulin, S.E.; Grachev, V.M.; Vlasik, K.F.; Egorov, R.R.; Korotkov, M.G.; Krivova, K.V.; Uteshev, Z.M.; Chernysheva, I.V. An Automated and Robotic Complex Based on a Xenon Gamma-Ray Spectrometer for Performing tasks for Decommissioning Nuclear and Radiation Hazardous Facilities and Monitoring the Development of Radioactive Waste. J. Phys. Conf. Ser. 2023, 2642, 012011. [Google Scholar] [CrossRef]
- Abd Rahman, N.A.; Sahari, K.S.M.; Hamid, N.A.; Hou, Y.C. A coverage path planning approach for autonomous radiation mapping with a mobile robot. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221116483. [Google Scholar] [CrossRef]
- Chachuła, K.; Nowak, R.; Solano, F. Pollution source localization in wastewater networks. Sensors 2021, 21, 826. [Google Scholar] [CrossRef]
- Munir, A.; Parasuraman, R. Exploration–exploitation tradeoff in the adaptive information sampling of unknown spatial fields with mobile robots. Sensors 2023, 23, 9600. [Google Scholar] [CrossRef]
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B.; Joyce, M.J. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energ. 2019, 111, 109–124. [Google Scholar] [CrossRef]
- Marques, L.; Vale, A.; Vaz, P. State-of-the-art mobile radiation detection systems for different scenarios. Sensors 2021, 21, 1051. [Google Scholar] [CrossRef]
- Ripani, M.; Rossi, F.; Cosentino, L.; Longhitano, F.; Musico, P.; Osipenko, M.; Poma, G.E.; Finocchiaro, P. Field Test of the MiniRadMeter Gamma and Neutron Detector for the EU Project CLEANDEM. Sensors 2024, 24, 5905. [Google Scholar] [CrossRef]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanagi, E.; Fukushima, M. Emergency Response to the Nuclear Accident at the Fukushima Daiichi Nuclear Power Plants Using Mobile Rescue Robots. J. Field Robot. 2013, 30, 44–63. [Google Scholar] [CrossRef]
- Sato, Y.; Terasaka, Y.; Utsugi, W.; Kikuchi, H.; Kiyooka, H.; Torii, T. Radiation Imaging Using a Compact Compton Camera Mounted on a Crawler Robot inside Reactor Buildings of Fukushima Daiichi Nuclear Power Station. J. Nucl. Sci. Technol. 2019, 56, 801–808. [Google Scholar] [CrossRef]
- Wright, T.; West, A.; Licata, M.; Hawes, N.; Lennox, B. Simulating ionising radiation in gazebo for robotic nuclear inspection challenges. Robotics 2021, 10, 86. [Google Scholar] [CrossRef]
- Kemp, S.; Kumar, S.; Bakker, C.; Rogers, J. Real-time radiological source term estimation for multiple sources in cluttered environments. IEEE Trans. Nucl. Sci. 2023, 70, 2406–2419. [Google Scholar] [CrossRef]
- Dong, H.; Yu, J.; Xu, Y.; Xu, Z.; Shen, Z.; Tang, J.; Shen, Y.; Wang, Y. MR-GMMapping: Communication efficient multi-robot mapping system via Gaussian mixture model. IEEE Robot. Autom. Lett. 2022, 7, 3294–3301. [Google Scholar] [CrossRef]
- Besada-Portas, E.; Lopez-Orozco, J.A.; Besada, J.; De la Cruz, J.M. Multisensor fusion for linear control systems with asynchronous, out-of-sequence and erroneous data. Automatica 2011, 47, 1399–1408. [Google Scholar] [CrossRef]
- Ye, X.; Song, F.; Zhang, Z.; Zeng, Q. A review of small UAV navigation system based on multisource sensor fusion. IEEE Sens. J. 2023, 23, 18926–18948. [Google Scholar] [CrossRef]
- Pinto, L.R.; Vale, A.; Brouwer, Y.; Borbinha, J.; Corisco, J.; Ventura, R.; Silva, A.M.; Mourato, A.; Marques, G.; Romanets, Y. Radiological scouting, monitoring and inspection using drones. Sensors 2021, 21, 3143. [Google Scholar] [CrossRef]
- Molnar, A.; Domozi, Z.; Lovas, I. Drone-based gamma radiation dose distribution survey with a discrete measurement point procedure. Sensors 2021, 21, 4930. [Google Scholar] [CrossRef]
- West, A.; Wright, T.; Tsitsimpelis, I.; Groves, K.; Joyce, M.J.; Lennox, B. Real-time avoidance of ionising radiation using layered costmaps for mobile robots. Front. Robot. AI 2022, 9, 862067. [Google Scholar] [CrossRef]
- Jarman, K.D.; Miller, E.A.; Wittman, R.S.; Gesh, C.J. Bayesian radiation source localization. Nucl. Technol. 2011, 175, 326–334. [Google Scholar] [CrossRef]
- De Meutter, P.; Hoffman, I. Bayesian source reconstruction of an anomalous Selenium-75 release at a nuclear research institute. J. Environ. Radioact. 2020, 218, 106225. [Google Scholar] [CrossRef] [PubMed]
- Kikawa, R.; Oyama, K.; Ming, H. Landcover Based 3-Dimensional Inverse Distance Weighting for Visualization of Radiation Dose. In Proceedings of the 2019 IEEE World Congress on Services (SERVICES), Milan, Italy, 8–13 July 2019; pp. 370–371. [Google Scholar]
- West, A.; Tsitsimpelis, I.; Licata, M.; Jazbec, A.; Snoj, L.; Joyce, M.J.; Lennox, B. Use of Gaussian process regression for radiation mapping of a nuclear reactor with a mobile robot. Sci. Rep. 2021, 11, 13975. [Google Scholar] [CrossRef] [PubMed]
- Khuwaileh, B.A.; Metwally, W.A. Gaussian process approach for dose mapping in radiation fields. Nucl. Eng. Technol. 2020, 52, 1807–1816. [Google Scholar] [CrossRef]
- Hu, X.; Wang, J.; Huo, J.; Zhou, Y.; Guo, Y.; Hu, L. Autonomous exploration for radioactive sources localization based on radiation field reconstruction. Nucl. Eng. Technol. 2024, 56, 1153–1164. [Google Scholar] [CrossRef]
- Jung, J.; You, D.; Lee, K.; Oh, J. 3D Radiation Mapping Using Gaussian Process Regression with Intensity Projection. Adv. Intell. Syst. 2024, 6, 2300820. [Google Scholar] [CrossRef]
- Berger, M.J.; Hubbell, J.H. XCOM: Photon Cross Sections on a Personal Computer; National Bureau of Standards: Washington, DC, USA, 1987. [Google Scholar]
- Wu, X.; Zhang, S.; Tang, S.; Cao, L. ORB-SLAM3 Algorithm Based on Improved Keyframe Selection. Appl. Res. Comput. 2023, 40, 1428–1433. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | 137Cs (662 keV) | 60Co (1173/1332 keV) |
|---|---|---|
| Aluminum (Al) | 20.16 () * | 14.85 () |
| Iron (Fe) | 57.84 () | 42.16 () |
| RMSE | MSE | MAE | R2 | Comp Time (s) | Comp Load | |
|---|---|---|---|---|---|---|
| Linear Interpolation | 8.65 | 74.81 | 6.98 | 0.868 | 0.36 | 1.42 |
| Nearest Interpolation | 8.42 | 70.98 | 5.58 | 0.874 | 0.56 | 1.64 |
| Gaussian Single-Kernel | 8.28 | 68.54 | 6.22 | 0.879 | 0.97 | 3.97 |
| Gaussian Multi-Kernel | 5.97 | 35.63 | 4.61 | 0.937 | 1.15 | 4.13 |
| Single Radioactive Source | Dual Radioactive Source | ||
|---|---|---|---|
| Radiation Source | 137Cs | 137Cs | 60Co |
| Activity (Bq) | 3.73 × 105 | 3.73 × 105 | 3.94 × 105 |
| Actual Position (m) | (4.40, 5.20) | (4.40, 5.20) | (1.20, 5.70) |
| Grid Coordinates | (68, 99) | (68, 100) | (58, 35) |
| Reconstructed Coordinates (m) | (4.40, 5.30) | (4.45, 5.30) | (1.30, 5.80) |
| Positioning Error (m) | 0.10 | 0.12 | 0.14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Liu, Q.; Chen, J.; Cao, Y.; Wang, G. Radiation Mapping: A Gaussian Multi-Kernel Weighting Method for Source Investigation in Disaster Scenarios. Sensors 2025, 25, 4736. https://doi.org/10.3390/s25154736
Zhang S, Liu Q, Chen J, Cao Y, Wang G. Radiation Mapping: A Gaussian Multi-Kernel Weighting Method for Source Investigation in Disaster Scenarios. Sensors. 2025; 25(15):4736. https://doi.org/10.3390/s25154736
Chicago/Turabian StyleZhang, Songbai, Qi Liu, Jie Chen, Yujin Cao, and Guoqing Wang. 2025. "Radiation Mapping: A Gaussian Multi-Kernel Weighting Method for Source Investigation in Disaster Scenarios" Sensors 25, no. 15: 4736. https://doi.org/10.3390/s25154736
APA StyleZhang, S., Liu, Q., Chen, J., Cao, Y., & Wang, G. (2025). Radiation Mapping: A Gaussian Multi-Kernel Weighting Method for Source Investigation in Disaster Scenarios. Sensors, 25(15), 4736. https://doi.org/10.3390/s25154736