
Development of a 5G-Connected Ultra-Wideband Radar Platform for Traffic Monitoring in a Campus Environment

 ,
,  , , and
, , and
Abstract
1. Introduction
- Development of a scalable and deployable 5G-connected UWB radar system using commercially available hardware and a custom communication module.
- Design and implementation of an IoT platform that supports real-time data visualization, sensor management, and external Application Programming Interface (API) access.
- Experimental validation and performance analysis, including radar accuracy and network latency evaluation in a real-world deployment on a university campus.
2. Requirements Analysis and System Design
2.1. Requirements
- Functionality: The radar system must be capable of detecting vehicles passing through a specific point on a roadway, classifying them, and indicating their speed and direction of movement. Each radar should cover at least two adjacent lanes without an intermediate separation.
- Wireless communication: For efficient, scalable, and seamless data transmission, radars should be able to send their collected data over at least 4G or 5G networks. This connectivity is crucial for enabling real-time data transmission, remote management of the radar units, and integration with a centralized monitoring system.
- Protection: The radar units must be protected against dust and water ingress to ensure they can operate reliably in various environmental conditions. Therefore, the radars should have an IP65 rating.
- Location: The radar units should be able to be conveniently mounted and oriented in various locations, offering flexibility in deployment. The possible installation sites include poles alongside the road, which provide a stable, elevated position for optimal coverage of the monitored lanes, as well as walls or flat surfaces, allowing for flexibility in urban environments where poles may not be feasible.
- Power supply: The radar units should be capable of being powered by batteries, with the option of using solar panels or other renewable energy sources to charge them. Such flexibility enables installation in locations without direct access to the power grid. Additionally, the solution should allow for partial battery recharging during specific times of the day, such as when the electrical lines feeding street lighting are activated. This capability ensures energy efficiency and sustainability, particularly in urban areas where infrastructure may be limited or eco-friendly solutions are prioritized.
- Visualization: The data captured by the mobility radars must be visualized as aggregated time series, considering both the vehicle count (total or by type) and the detected speeds and directions.
- Data access: The platform must allow downloading historical data (CSV and XLS formats will be considered). The data must be available for third parties through a REST API with a clearly defined format.
- Management: The solution must enable the configuration and management of different devices and their activation. The platform must allow multiple-user access. Each user will have access to a specific set of radars. Multiple users can access the data from a radar.
- Deployment and scalability: The platform must support thousands of radar units without significant performance degradation. The platform must be containerized and ready for cloud deployment.
- Connectivity: The web platform must be accessible from the internet, and the connected radars must be able to transmit information using only an internet connection, without requiring dedicated networks.
2.2. System Design
2.2.1. Connected Radars
2.2.2. IoT Platform
- MQTT Broker: This component receives data from radar devices and filters incoming messages, ensuring authentication and data integrity. RabbitMQ is deployed as the broker, configured for MQTT-based communication.
- Proxy: Acting as an intermediary, the proxy handles communication with the MQTT Broker and stores relevant data in the database. Implemented in NodeJS with TypeScript, it follows SOLID principles for improved maintainability [21].
- Database: The system employs a MySQL relational database deployed on an NAS unit. A RAID 5 configuration enhances data redundancy and storage efficiency, ensuring high-speed read/write operations.
- API: The API serves as the interface between the database and the web platform, handling HTTP requests and optimizing SQL queries. NestJS is used as the framework, ensuring a scalable back-end structure.
- Web Server: The front end is managed via an Angular-based platform, leveraging NodeJS for back-end execution. JSON Web Token (JWT) secure authentication and user access.
3. Implementation Details
3.1. Connected Radars
3.1.1. RaspberryPi 4
- raspi-config: Used to manage device interfaces, including enabling the UART port, configuring remote SSH access, and disabling Wi-Fi and Bluetooth to reduce power consumption and minimize interference.
- raspi-gpio: Enables manual control and configuration of GPIO pin states.
- Python: The programming language used to implement the application that manages radar measurements and transmits data to the MQTT server.
- nmcli and mmcli: Command-line tools used to manage the connectivity of the communication module.
3.1.2. 5GBroad Board
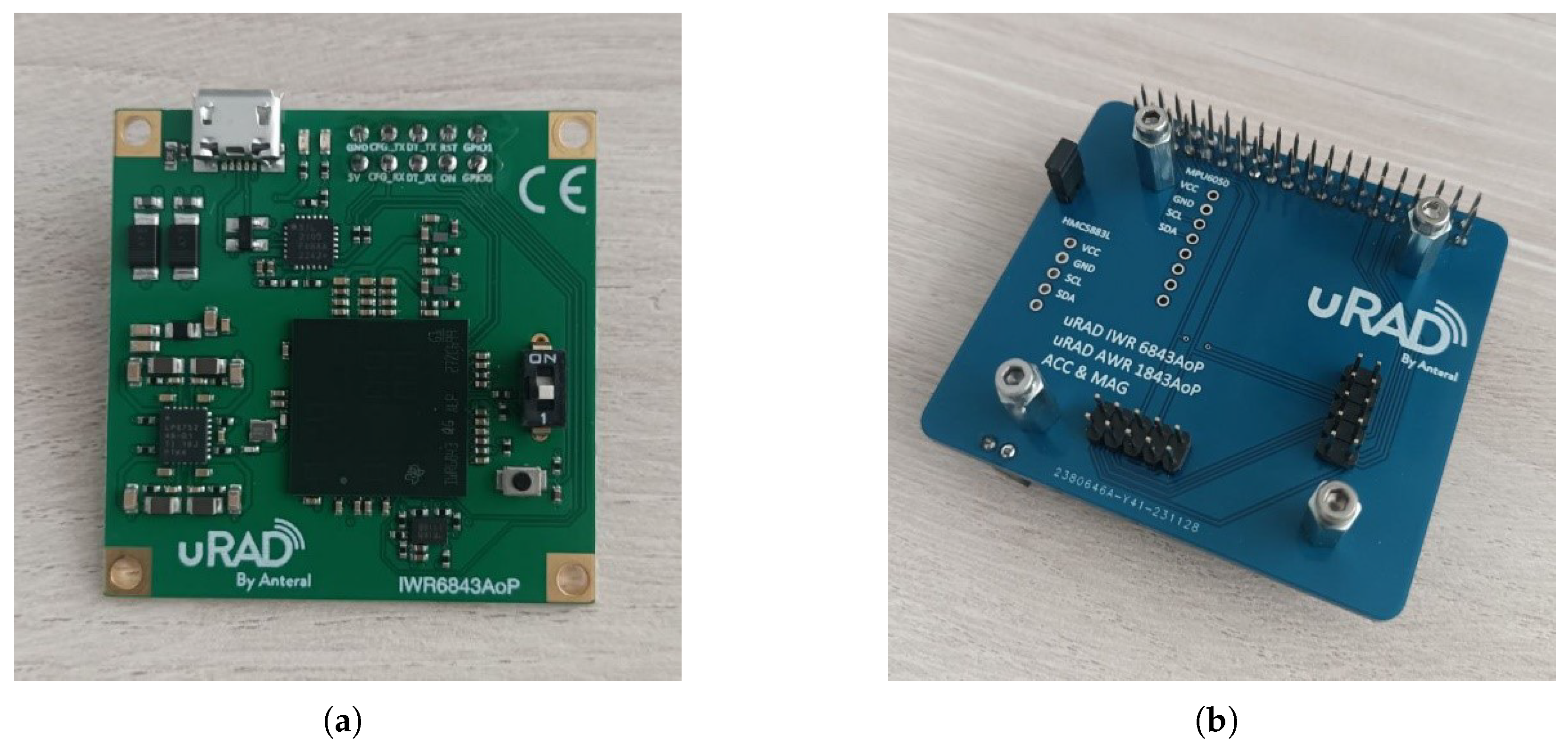
3.1.3. uRAD Industrial Radar
3.1.4. Electrical Power Solution
3.1.5. Software
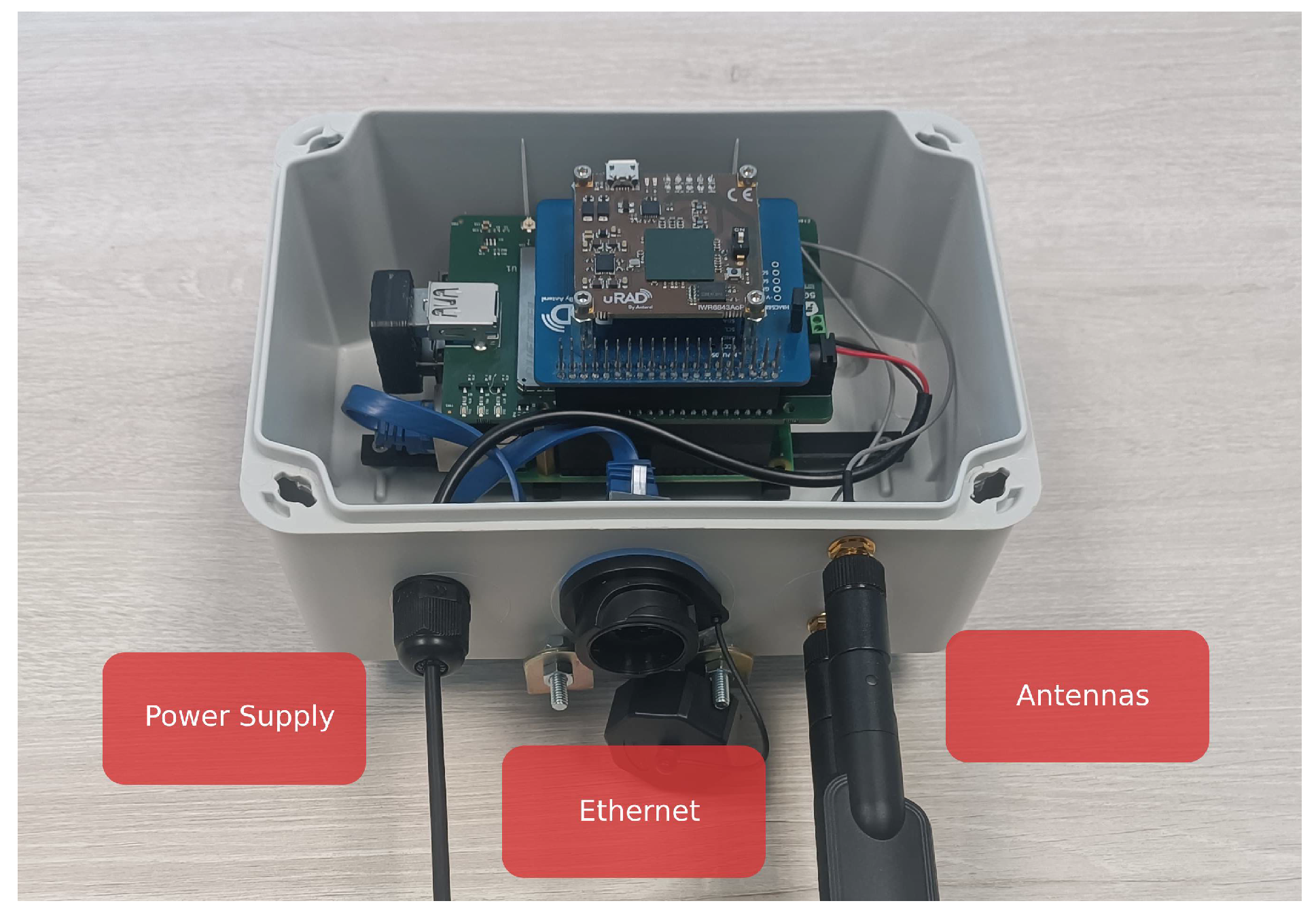
3.1.6. Box and Supports for Machining
3.2. IoT Platform
3.2.1. MQTT Broker
3.2.2. Proxy
3.2.3. Database Implementation
3.2.4. API
3.2.5. Web Platform Implementation with Angular
- index.html: contains the main structure for the app’s user interface.
- main.ts: serves as the entry point for executing the application’s logic.
- style.css: defines the global styles for the application.
3.2.6. Visual Design of the Web Platform
3.2.7. Technology Stack
- RabbitMQ with MQTT plugin: for communication between radar devices and the proxy.
- Node.js and NestJS: For back-end services, including API creation and handling radar data.
- MySQL: for storing radar- and user-related data in a relational database.
- Angular: for creating the user interface with a focus on reusability and modularity.
- JWT: for secure authentication of users.
- bcrypt: for securely hashing user passwords during authentication.
3.3. Functional Validation: Laboratory Environment over 4G/5G Networks
4. Deployment
4.1. Radars
4.2. IoT Platform
5. Results
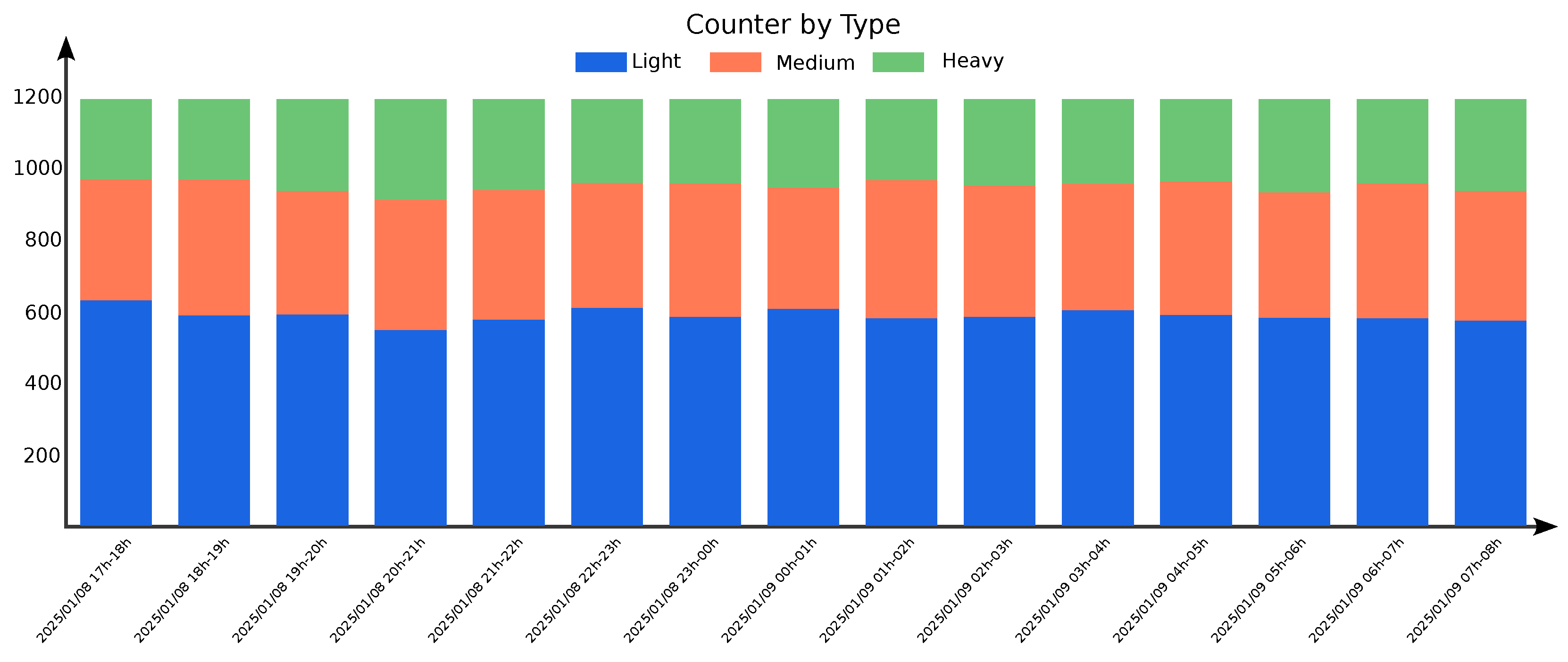
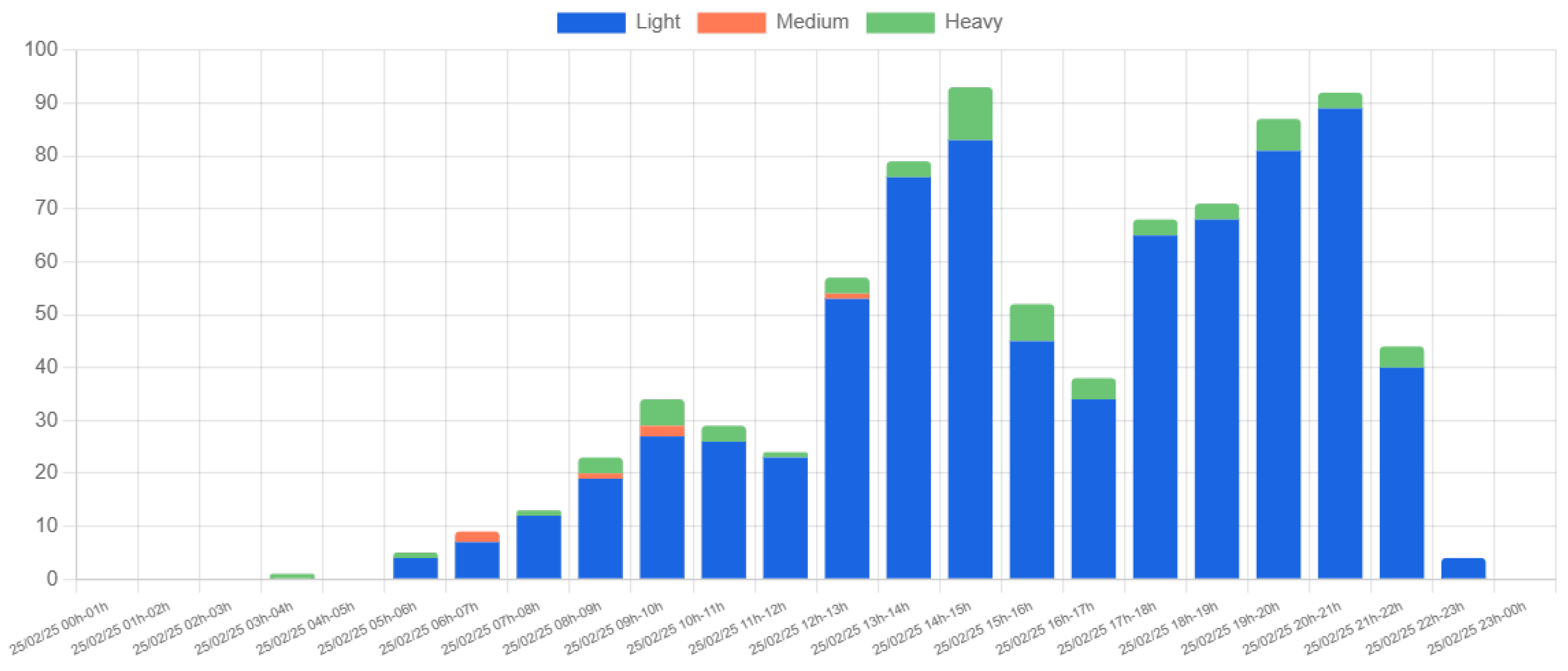
5.1. Traffic Monitoring Results
5.1.1. Location 1
5.1.2. Location 2
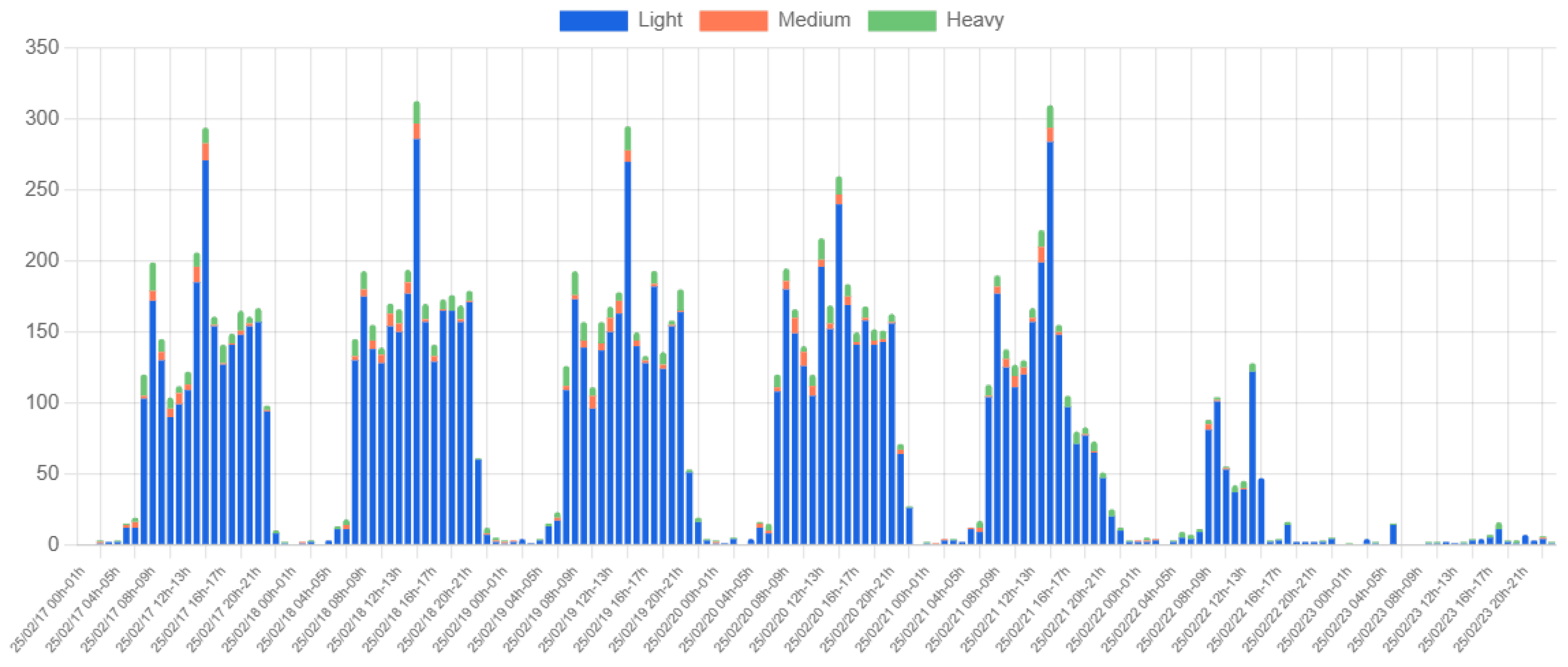
5.1.3. Weekly and Multi-Week Trends
5.1.4. Speed Analysis
5.2. Evaluation of Detection Accuracy and Latency
5.2.1. Experiment Setup
5.2.2. Results and Analysis
6. Discussion
7. Conclusions
- Full-system scope: This work presents an end-to-end radar-based monitoring solution (covering sensing, 5G communication, cloud integration, and data visualization) built entirely using COTS components.
- Real-world validation: The system was validated through deployment in a campus environment. Unlike prior works that focus narrowly on radar hardware or lab simulations, our work contributes a full-stack, deployable IoT solution for smart mobility applications.
- Cost and deployment feasibility: The use of commercially available components (UWB radar, Raspberry Pi, custom 5G module, and enclosure) results in a unit cost of approximately EUR 600. With a power consumption under 5.5 W, the system is suitable for energy-efficient or solar-powered installations. Minimal alignment and mounting requirements enable rapid, large-scale deployment.
- Scalability and network efficiency: The MQTT-based IoT platform supports high scalability. Radar frames of just 52 bytes and efficient server-side message handling ensure low computational and bandwidth demands, making the solution viable for large-scale urban deployments.
- Privacy and compliance: Unlike video-based systems, radar sensors capture no personally identifiable information, reducing privacy risks and ensuring compliance with regulations such as the GDPR. This makes the system particularly suitable for privacy-sensitive scenarios.
- Performance evaluation: Field testing on a double-lane road during peak traffic hours demonstrated robust performance: 94.81% detection rate, 1.02% false detection rate, 97.29% classification accuracy, and 99.66% direction accuracy. The median end-to-end latency over a commercial 5G network was 75 ms. These results validate the system’s capability to deliver accurate and real-time traffic monitoring, even under challenging conditions and non-dedicated networks.
- Implications for smart campus and urban mobility: The system provided insights into vehicle flow and speed variations. The collected data confirmed expected traffic patterns, such as peak congestion during morning and afternoon hours, and revealed occasional excessive speed. These insights support data-driven traffic management strategies, including entry/exit control, dynamic parking policies, and pedestrian safety enhancements. The findings contribute to the broader vision of intelligent transportation systems and smart campus development.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Etaiwi, W.; Idwan, S. Traffic management systems: A survey of current solutions and emerging technologies. J. Comput. Soc. Sci. 2025, 8, 7. [Google Scholar] [CrossRef]
- Musa, A.A.; Malami, S.I.; Alanazi, F.; Ounaies, W.; Alshammari, M.; Haruna, S.I. Sustainable Traffic Management for Smart Cities Using Internet-of-Things-Oriented Intelligent Transportation Systems (ITS): Challenges and Recommendations. Sustainability 2023, 15, 9859. [Google Scholar] [CrossRef]
- Mahrez, Z.; Sabir, E.; Badidi, E.; Saad, W.; Sadik, M. Smart Urban Mobility: When Mobility Systems Meet Smart Data. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6222–6239. [Google Scholar] [CrossRef]
- Jain, N.K.; Saini, R.K.; Mittal, P. A Review on Traffic Monitoring System Techniques. In Soft Computing: Theories and Applications; Ray, K., Sharma, T.K., Rawat, S., Saini, R.K., Bandyopadhyay, A., Eds.; Springer: Singapore, 2019; pp. 569–577. [Google Scholar]
- Won, M. Intelligent Traffic Monitoring Systems for Vehicle Classification: A Survey. IEEE Access 2020, 8, 73340–73358. [Google Scholar] [CrossRef]
- Yang, Z.; Shi, F.; Liang, H. A Portable Traffic Counting, Speed Estimation, and Classification Terminal Using IR-UWB Radar. IEEE Sens. J. 2022, 22, 13365–13374. [Google Scholar] [CrossRef]
- Micko, K.; Papcun, P.; Zolotova, I. Review of IoT Sensor Systems Used for Monitoring the Road Infrastructure. Sensors 2023, 23, 4469. [Google Scholar] [CrossRef] [PubMed]
- Soom, J.; Leier, M.; Janson, K.; Tuhtan, J.A. Open Urban mmWave Radar and Camera Vehicle Classification Dataset for Traffic Monitoring. IEEE Access 2024, 12, 65128–65140. [Google Scholar] [CrossRef]
- Nocua M, F.; Pérez-Holguín, W.J.; Pardo-Beainy, C. Urban traffic monitoring based on deep learning on an embedded GPU. Expert Syst. Appl. 2025, 273, 126847. [Google Scholar] [CrossRef]
- Cheraghinia, M.; Shahid, A.; Luchie, S.; Gordebeke, G.J.; Caytan, O.; Fontaine, J.; Herbruggen, B.V.; Lemey, S.; Poorter, E.D. A Comprehensive Overview on UWB Radar: Applications, Standards, Signal Processing Techniques, Datasets, Radio Chips, Trends and Future Research Directions. IEEE Commun. Surv. Tutorials, 2024; early access. [Google Scholar] [CrossRef]
- Lim, H.S.; Park, H.M.; Lee, J.E.; Kim, Y.H.; Lee, S. Lane-by-Lane Traffic Monitoring Using 24.1 GHz FMCW Radar System. IEEE Access 2021, 9, 14677–14687. [Google Scholar] [CrossRef]
- Zhu, N.; Qu, Z.; Fang, X.; Niu, G.; Xu, S. Vehicles Detection, Tracking, and Classification Using 35GHz FMCW Radar. In Proceedings of the 2023 IEEE International Radar Conference (RADAR), Sydney, Australia, 6–10 November 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Tan, L.; Yang, Z.; Chu, P. Bidirectional Multilane Vehicle Counting Approach Based on Multiscale of Multitraffic States Using MIMO Radar. IEEE Sensors J. 2024, 24, 5622–5635. [Google Scholar] [CrossRef]
- Pawar, V.; Zade, N.; Vora, D.; Khairnar, V.; Oliveira, A.; Kotecha, K.; Kulkarni, A. Intelligent Transportation System With 5G Vehicle-to-Everything (V2X): Architectures, Vehicular Use Cases, Emergency Vehicles, Current Challenges, and Future Directions. IEEE Access 2024, 12, 183937–183960. [Google Scholar] [CrossRef]
- Roger, S.; Botella-Mascarell, C.; Martín-Sacristán, D.; García-Roger, D.; Monserrat, J.F.; Svensson, T. Sustainable Mobility in B5G/6G: V2X Technology Trends and Use Cases. IEEE Open J. Veh. Technol. 2024, 5, 459–472. [Google Scholar] [CrossRef]
- uRAD. uRAD Radar Industrial Website. Available online: https://urad.es/en/product/urad-radar-industrial (accessed on 15 May 2025).
- Log, M.M.; Thoresen, T.; Eitrheim, M.H.R.; Levin, T.; Tørset, T. Using Low-Cost Radar Sensors and Action Cameras to Measure Inter-Vehicle Distances in Real-World Truck Platooning. Appl. Syst. Innov. 2023, 6, 55. [Google Scholar] [CrossRef]
- Nair, D.; Gaffar, Y.A.; Winberg, S.L. Dual Radar System for Predicting Collisions at Uncontrolled Intersections. In Proceedings of the 2023 International Conference on Electrical, Computer and Energy Technologies (ICECET), Cape Town, South Africa, 16–17 November 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Qiu, Y.; Zhang, J.; Sun, T.; Chen, Y.; Zhang, J.; Ji, B. WASTON: Inferring Critical Information to Enable Spoofing Attacks Using COTS mmWave Radar. IEEE Trans. Dependable Secur. Comput. 2025, 22, 757–770. [Google Scholar] [CrossRef]
- Molner, N.; Renart, J.; Cárcel, J.L.; Piscione, P.; Bernini, G.; Politis, C.; Garrido Serrato, J.J.; Buehrmann, F.; Cantero, M.; Fuentes, M.; et al. D4.2 Smart NR and NG-RAN IoT Designs (Version 1). 2022. [Google Scholar] [CrossRef]
- Martin, R.C. Design Principles and Design Patterns; Technical Report; Object Mentor: Gurnee, IL, USA, 2000. [Google Scholar]
- Miller, R.B. Response time in man-computer conversational transactions. In Proceedings of the December 9-11, 1968, Fall Joint Computer Conference, Part I, New York, NY, USA, 1968; AFIPS ’68 (Fall, Part I), San Francisco, CA, USA, 9–11 December 1968; 1968; pp. 267–277. [Google Scholar] [CrossRef]
- Abadi, A.; Rajabioun, T.; Ioannou, P.A. Traffic Flow Prediction for Road Transportation Networks With Limited Traffic Data. IEEE Trans. Intell. Transp. Syst. 2015, 16, 653–662. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Description |
|---|---|---|
| USB_COMMUNICATION | False | Defines whether communication is via USB |
| USB_CONNECTOR_UPWARD | True | Indicates radar USB connector orientation |
| pitch_angle | 15° | Radar tilt angle relative to vertical |
| yaw_angle | 15° | Radar angle relative to road axis |
| VELOCITY_POSITIVE | True | Detects vehicles approaching the radar |
| VELOCITY_NEGATIVE | True | Detects vehicles moving away from the radar |
| Metric | Symbol/Expression | Value | Description |
|---|---|---|---|
| Total vehicles observed | 308 | Manually recorded vehicle count | |
| Total detections | 295 | Vehicles detected by the radar system | |
| Missing detections | 16 | Vehicles not detected by the system | |
| False detections | 3 | Incorrect vehicle detections by the system | |
| Correct detections | 292 | Correct vehicle detections by the system | |
| Detection rate (%) | 94.81 | Percentage of detected vehicles relative to total observed | |
| False detection rate (%) | 1.02 | Percentage of incorrect detections relative to total detected | |
| Misclassified vehicles | 8 | Number of vehicles incorrectly classified | |
| Incorrect direction estimations | 1 | Number of vehicles with wrong movement direction | |
| Classification accuracy (%) | 97.29 | Percentage of correctly classified vehicles | |
| Direction accuracy (%) | 99.66 | Percentage of correct direction estimations |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martín-Sacristán, D.; Ravelo, C.; Trelis, P.; Ortiz, M.; Fuentes, M. Development of a 5G-Connected Ultra-Wideband Radar Platform for Traffic Monitoring in a Campus Environment. Sensors 2025, 25, 3203. https://doi.org/10.3390/s25103203
Martín-Sacristán D, Ravelo C, Trelis P, Ortiz M, Fuentes M. Development of a 5G-Connected Ultra-Wideband Radar Platform for Traffic Monitoring in a Campus Environment. Sensors. 2025; 25(10):3203. https://doi.org/10.3390/s25103203
Chicago/Turabian StyleMartín-Sacristán, David, Carlos Ravelo, Pablo Trelis, Miriam Ortiz, and Manuel Fuentes. 2025. "Development of a 5G-Connected Ultra-Wideband Radar Platform for Traffic Monitoring in a Campus Environment" Sensors 25, no. 10: 3203. https://doi.org/10.3390/s25103203
APA StyleMartín-Sacristán, D., Ravelo, C., Trelis, P., Ortiz, M., & Fuentes, M. (2025). Development of a 5G-Connected Ultra-Wideband Radar Platform for Traffic Monitoring in a Campus Environment. Sensors, 25(10), 3203. https://doi.org/10.3390/s25103203