
A New Fast Control Strategy of Terminal Sliding Mode with Nonlinear Extended State Observer for Voltage Source Inverter


Abstract
1. Introduction
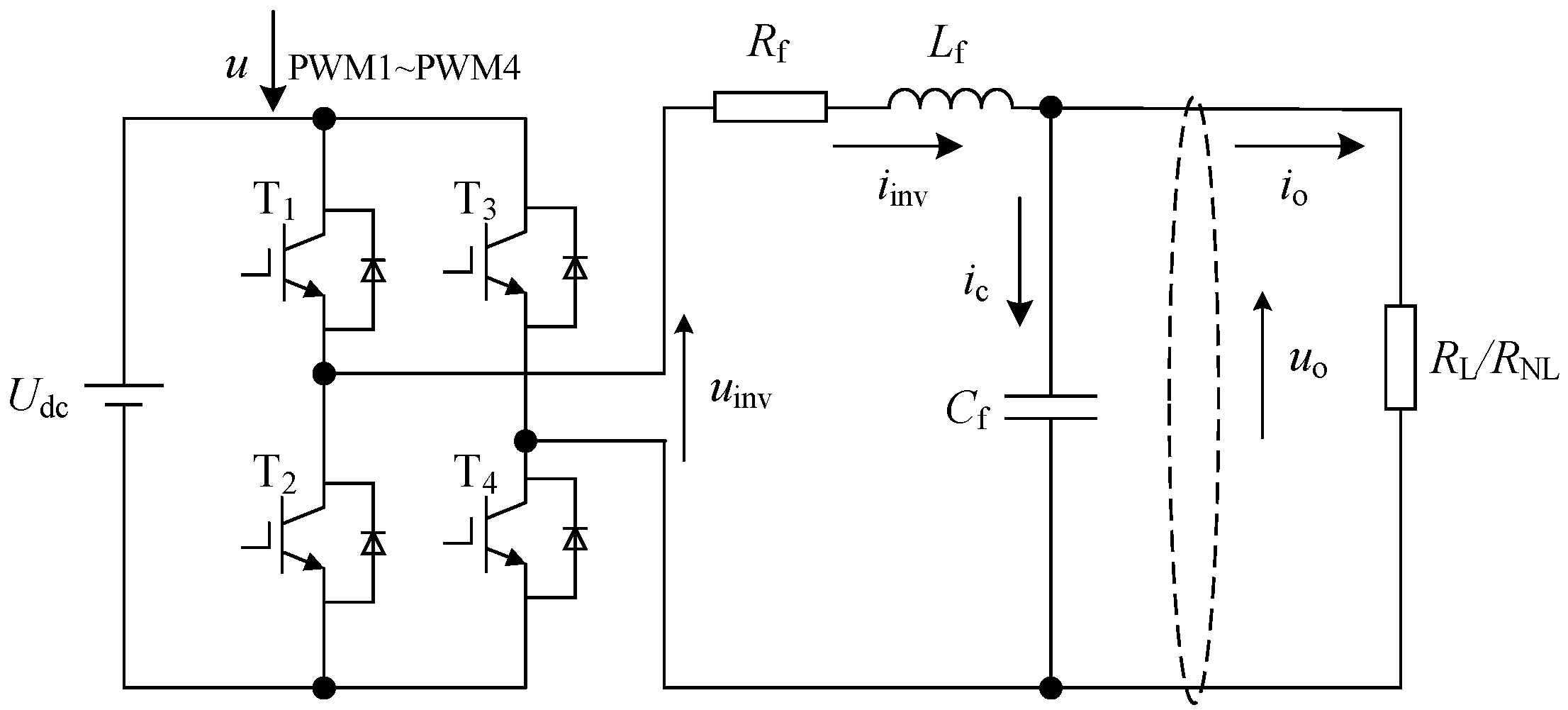
2. Problem Formulation
3. Controller Design and Stability Analysis
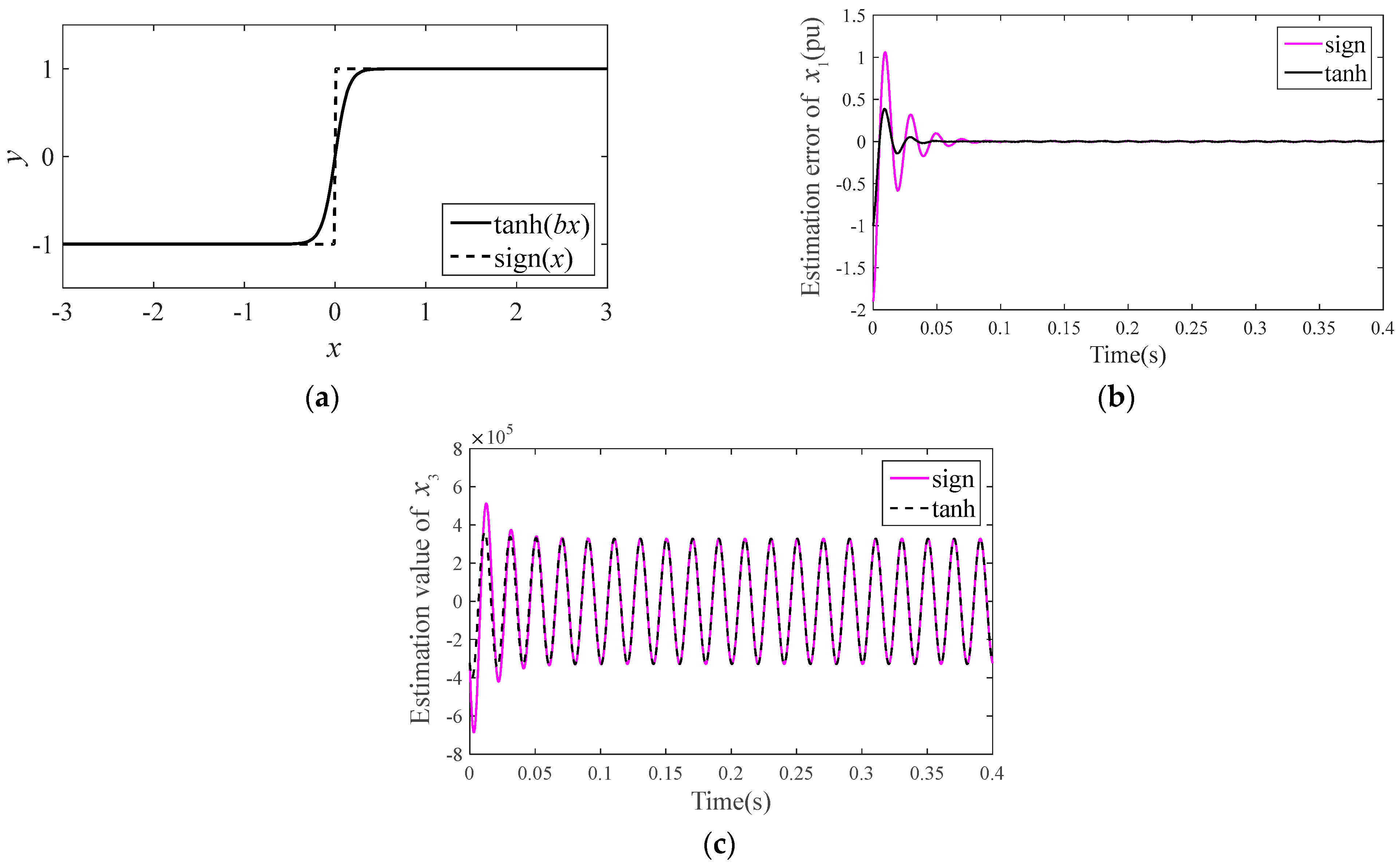
3.1. Nonlinear ESO Design Based on Hyperbolic Tangent Function
3.1.1. Nonlinear ESO Design
3.1.2. Nonlinear ESO Convergence Analysis
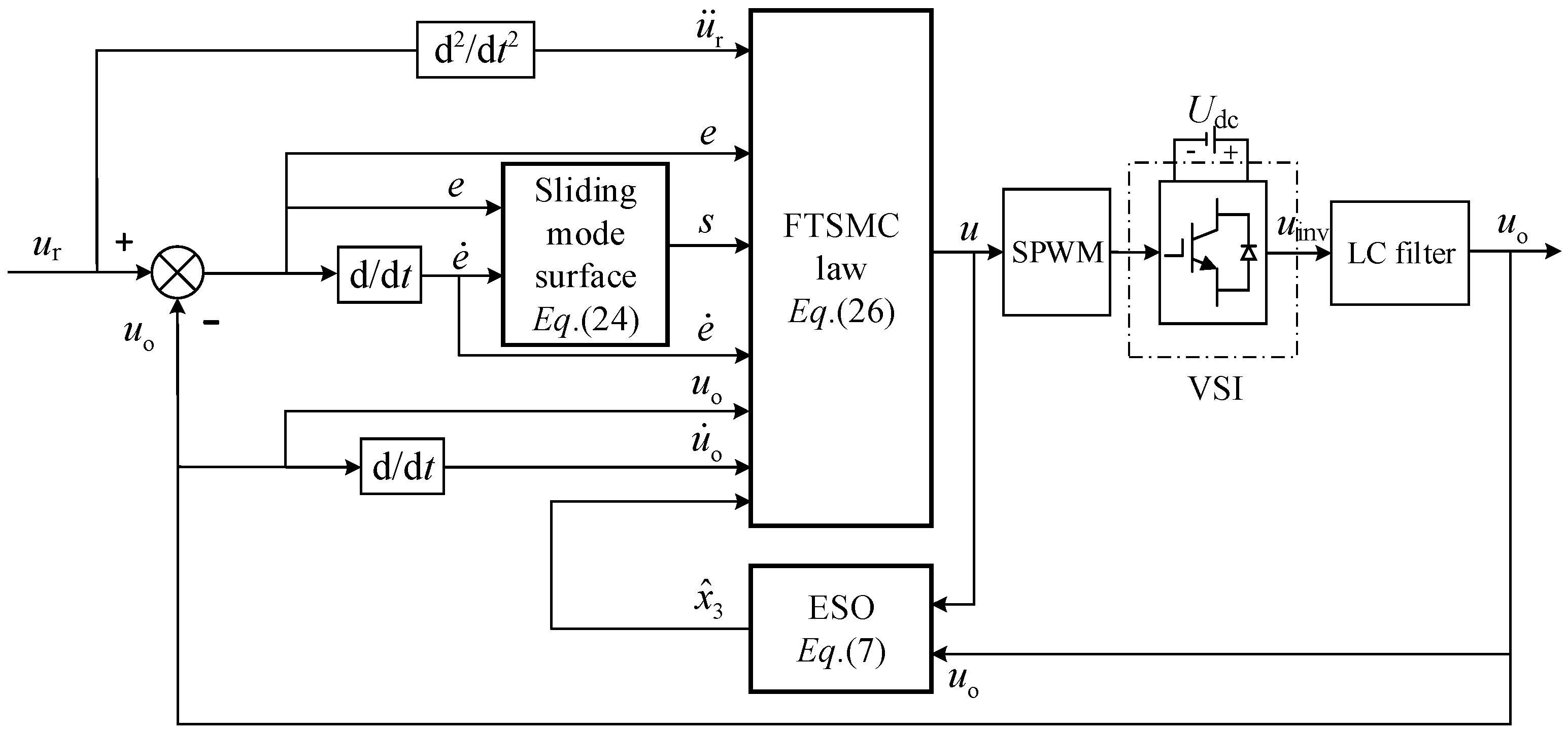
3.2. Nonlinear ESO-Based FTSMC Design
3.2.1. Nonlinear ESO-Based FTSMC Strategy
3.2.2. Stability Analysis of FTSMC
4. Simulation Analysis
4.1. Performance of System 1
4.2. Comparative Study of System 1 and System 2
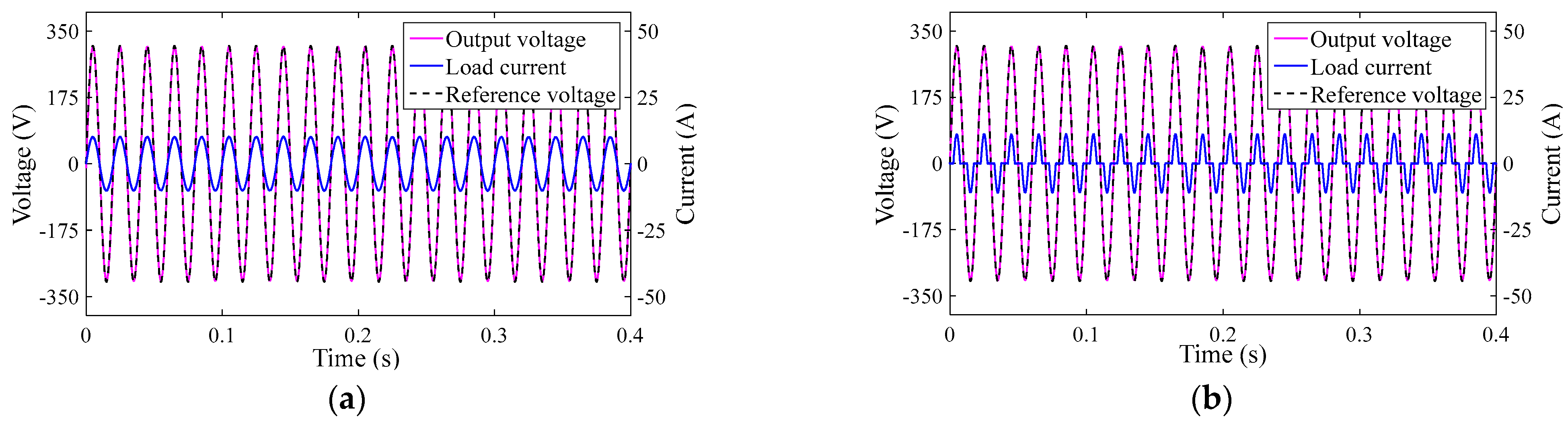
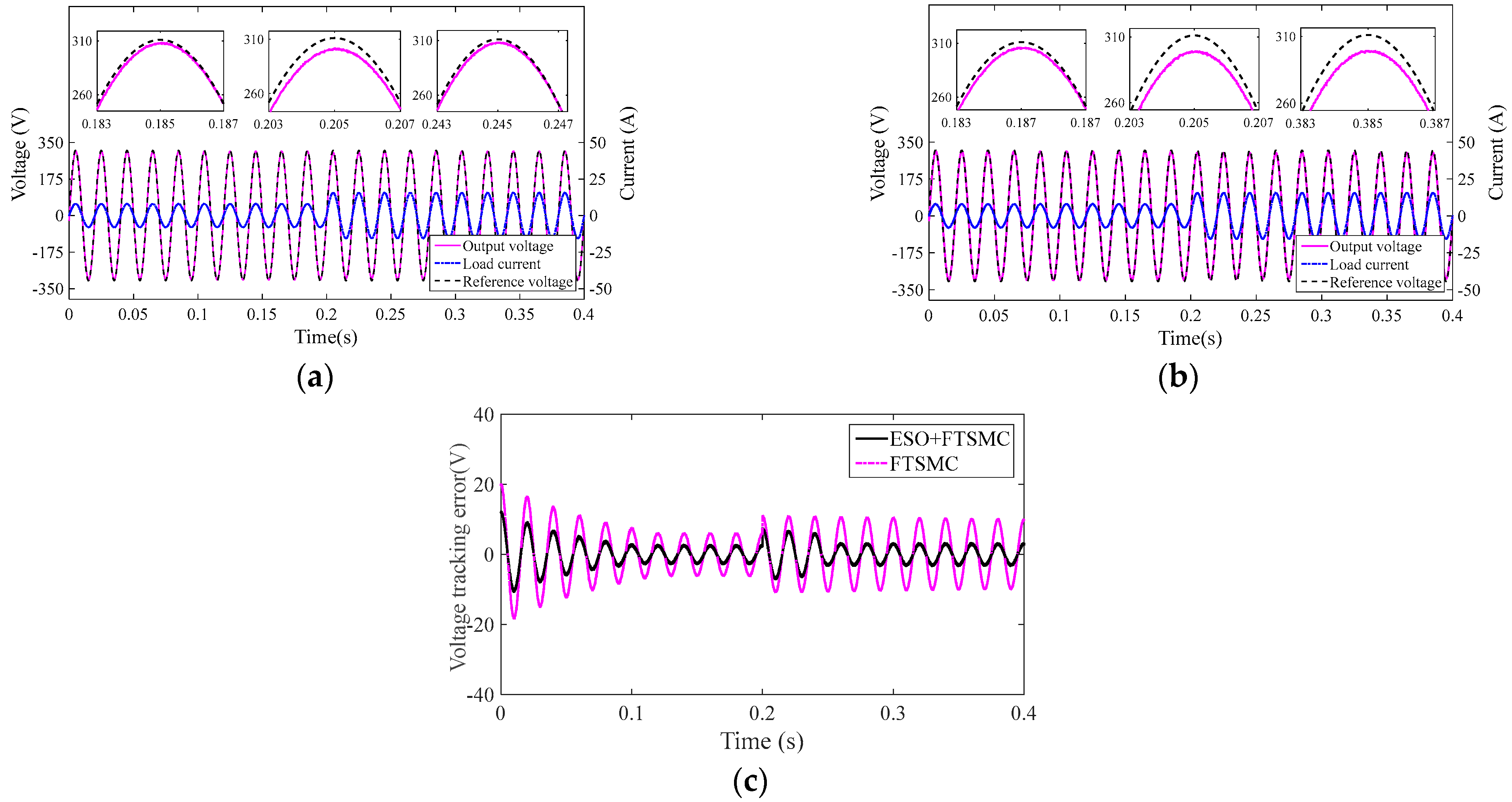
4.2.1. Comparison of System 1 and System 2 under Varying Linear Loads
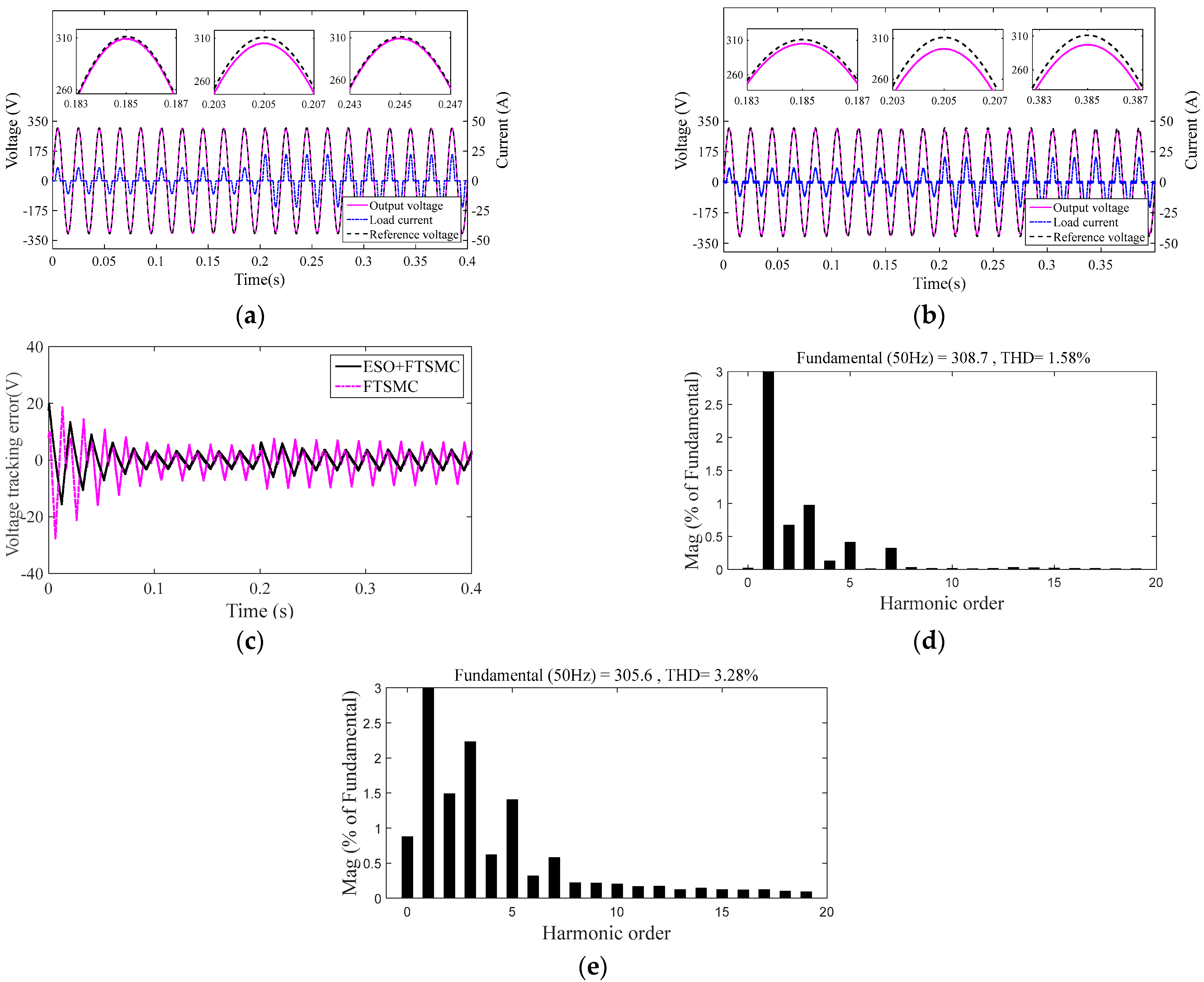
4.2.2. Comparison of System 1 and System 2 under Varying Nonlinear Loads
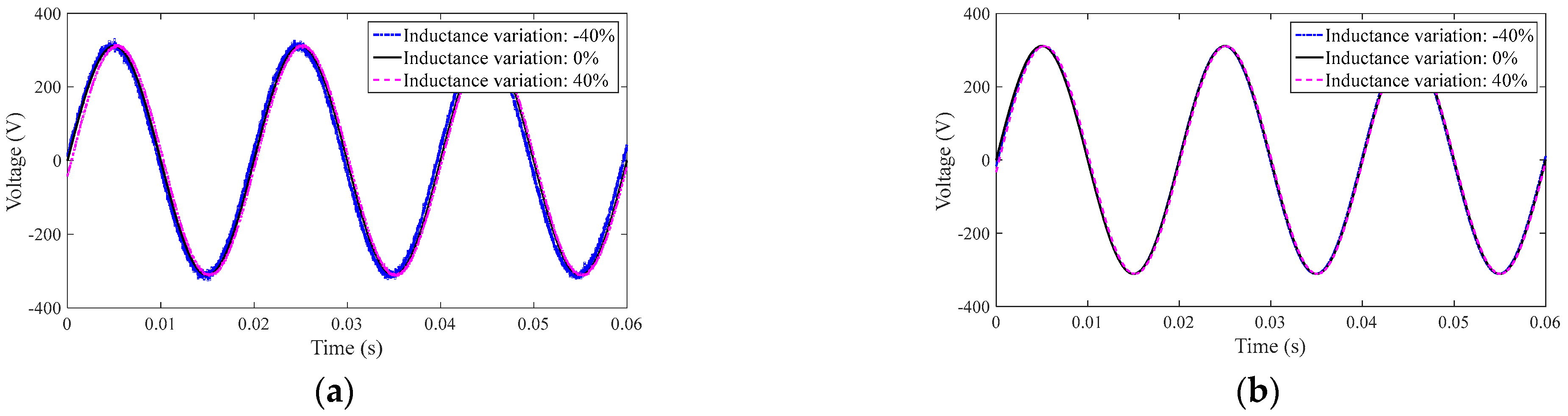
4.2.3. Comparison of System 1 and System 2 under Perturbation of Filter Parameters
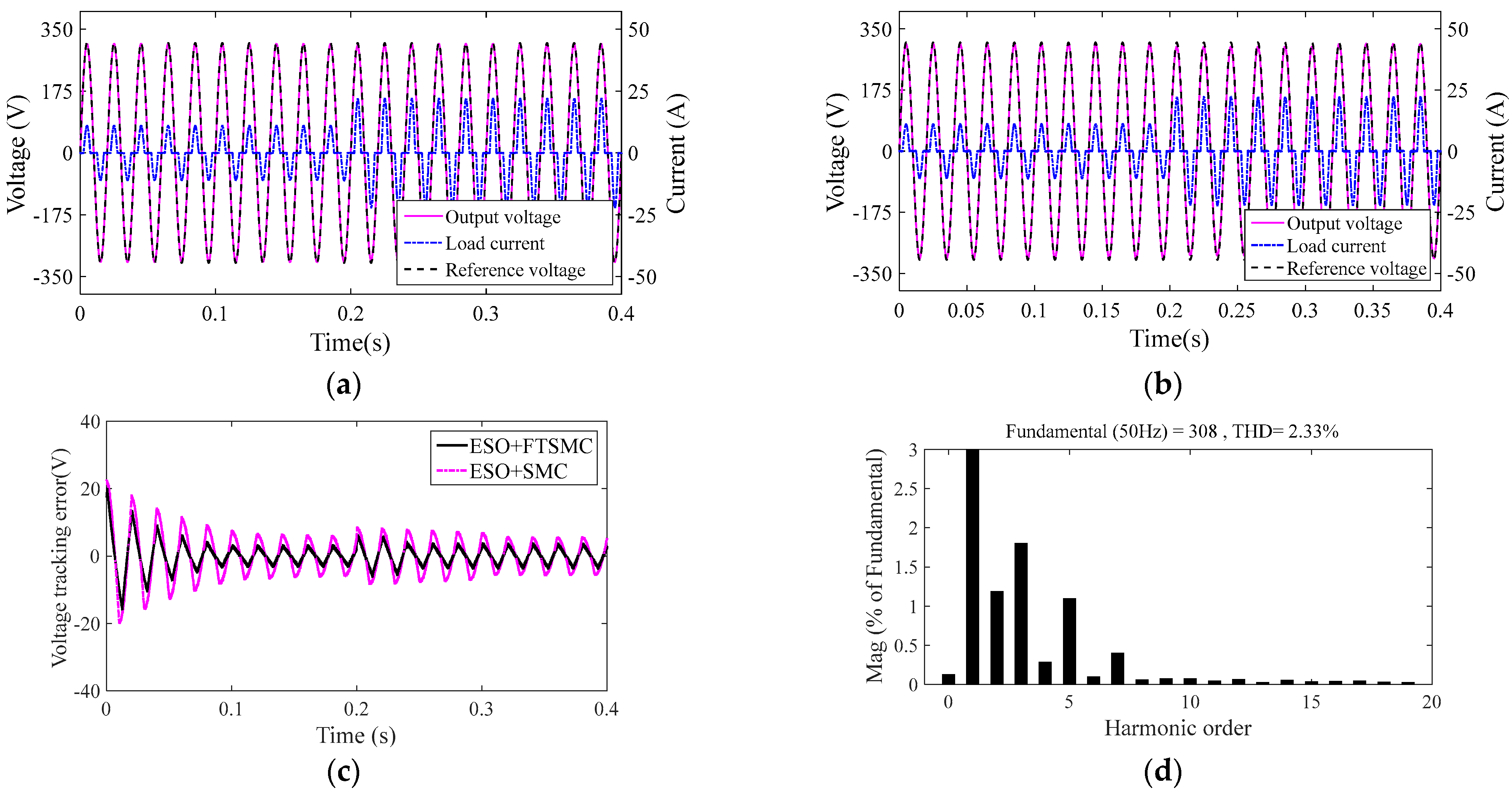
4.3. Comparative Study of System 1 and System 3
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. The Design of System 2
Appendix A.2. The Design of System 3
References
- Olivares, D.E.; Mehrizi-Sani, A. Trends in microgrid control. IEEE Trans. Smart Grid. 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Li, M.; Zhang, W.; Hu, B.; Kang, J.; Wang, Y.; Lu, S. Automatic assessment of depression and anxiety through encoding pupil-wave from HCI in VR scenes. ACM Trans. Multimed. Comput. Commun. Appl. 2022. [Google Scholar] [CrossRef]
- Xie, C.; Zhou, L.; Ding, S.; Liu, R.; Zheng, S. Experimental and numerical investigation on self-propulsion performance of polar merchant ship in brash ice channel. Ocean. Eng. 2023, 269, 113424. [Google Scholar] [CrossRef]
- Zhao, H.M.; Zhang, P.P.; Zhang, R.C.; Yao, R.; Deng, W. A novel performance trend prediction approach using ENBLS with GWO. Meas. Sci. Technol. 2023, 34, 025018. [Google Scholar] [CrossRef]
- Yu, C.; Gong, B.; Song, M.; Zhao, E.; Chang, C.-I. Multiview Calibrated Prototype Learning for Few-shot Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5544713. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Sadati, N. Distributed robust finite-time secondary voltage and frequency control of islanded microgrids. IEEE Trans. Power Syst. 2016, 32, 3648–3659. [Google Scholar] [CrossRef]
- Duan, Z.; Song, P.; Yang, C.; Deng, L.; Jiang, Y.; Deng, F.; Jiang, X.; Chen, Y.; Yang, G.; Ma, Y.; et al. The impact of hyperglycaemic crisis episodes on long-term outcomes for inpatients presenting with acute organ injury: A prospective, multicentre follow-up study. Front. Endocrinol 2022, 13, 1057089. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Cai, X.; Zhang, H.; Zhang, Z.; Jin, T.; Chen, H.; Deng, W. Multi-strategy competitive-cooperative co-evolutionary algorithm and its application. Inf. Sci. 2023, 635, 328–344. [Google Scholar] [CrossRef]
- Huang, C.; Zhou, X.B.; Ran, X.J.; Liu, Y.; Deng, W.Q.; Deng, W. Co-evolutionary competitive swarm optimizer with three-phase for large-scale complex optimization problem. Inf. Sci. 2023, 619, 2–18. [Google Scholar] [CrossRef]
- Song, Y.; Zhao, G.; Zhang, B.; Chen, H.; Deng, W.Q.; Deng, Q. An enhanced distributed differential evolution algorithm for portfolio optimization problems. Eng. Appl. Artif. Intell. 2023, 121, 106004. [Google Scholar] [CrossRef]
- Xu, J.J.; Zhao, Y.L.; Chen, H.Y.; Deng, W. ABC-GSPBFT: PBFT with grouping score mechanism and optimized consensus process for flight operation data-sharing. Inf. Sci. 2023, 624, 110–127. [Google Scholar] [CrossRef]
- Li, M.; Zhang, J.; Song, J.; Li, Z.; Lu, S. A clinical-oriented non severe depression diagnosis method based on cognitive behavior of emotional conflict. IEEE Trans. Comput. Soc. Syst. 2022. [Google Scholar] [CrossRef]
- Sivasubramanian, M.; Vidyasagar, S.; Kalyanasundaram, V.; Kaliyaperumal, S. Performance Evaluation of Seven Level Reduced Switch ANPC Inverter in Shunt Active Power Filter With RBFNN-Based Harmonic Current Generation. IEEE Access 2022, 10, 21497–21508. [Google Scholar] [CrossRef]
- Basit, B.A.; Rehman, A.U.; Choi, H.H.; Jung, J.-W. A Robust Iterative Learning Control Technique to Efficiently Mitigate Disturbances for Three-Phase Standalone Inverters. IEEE Trans. Ind. Electron. 2022, 69, 3233–3244. [Google Scholar] [CrossRef]
- Yap, K.Y.; Beh, C.M.; Sarimuthu, C.R. Fuzzy logic controller-based synchronverter in grid-connected solar power system with adaptive damping factor. Chin. J. Electr. Eng. 2021, 7, 37–49. [Google Scholar] [CrossRef]
- Shen, X.Q.; Wang, H.Q. Distributed Secondary Voltage Control of Islanded Microgrids Based on RBF-NeuralNetwork Sliding-Mode Technique. IEEE Access 2019, 29, 5–9. [Google Scholar]
- Teimour, H.; Hamed, K. Decentralised robust T-S fuzzy controller for a parallel islanded AC microgrid. IET Gener. Transm. Distrib. 2019, 18, 5–7. [Google Scholar]
- Li, Z.; Zang, C. Control of a Grid-Forming Inverter Based on Sliding-Mode and Mixed ${H_2}/{H_\infty} $ Control. IEEE Trans. Ind. Electron. 2016, 64, 3862–3872. [Google Scholar] [CrossRef]
- Yang, S.; Lei, Q.; Peng, F.Z.; Qian, Z. A Robust Control Scheme for Grid-Connected Voltage-Source Inverters. IEEE Trans. Ind. Electron. 2011, 58, 202–212. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, Y.; Fan, M.; Wang, K.; Zhang, X.; Hu, J.; Fang, G.; Zeng, W.; Vazquez, S. A Novel Continuous Control Set Model Predictive Control for LC-Filtered Three-Phase Four-Wire Three-Level Voltage-Source Inverter. IEEE Trans. Power Electron. 2023, 38, 4572–4584. [Google Scholar] [CrossRef]
- Song, W.; Saeed, M.S.R.; Yu, B.; Li, J.; Guo, Y. Model Predictive Current Control with Reduced Complexity for Five-Phase Three-Level NPC Voltage-Source Inverters. IEEE Trans. Transp. Electrif. 2022, 8, 1906–1917. [Google Scholar] [CrossRef]
- Xu, Y.; He, Y.; Li, H.; Xiao, H. Model Predictive Control Using Joint Voltage Vector for Quasi-Z-Source Inverter with Ability of Suppressing Current Ripple. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1108–1124. [Google Scholar] [CrossRef]
- Hou, B.; Mu, A.; Dong, F.; Liu, J.; Liu, H. Backstepping sliding mode control strategy of single-phase voltage source full-bridge inverter. Trans. China Electrotech. Soc. 2015, 30, 93–99. [Google Scholar]
- Chaturvedi, S.; Fulwani, D.; Guerrero, J.M. Adaptive-SMC Based Output Impedance Shaping in DC Microgrids Affected by Inverter Loads. IEEE Trans. Sustain. Energy 2020, 11, 2940–2949. [Google Scholar] [CrossRef]
- Wang, Z.; Li, S.; Yang, J.; Li, Q. Current sensorless sliding mode control for direct current alternating current inverter with load variations via a USDO approach. IET Power Electron. 2018, 11, 1389–1398. [Google Scholar] [CrossRef]
- Benrabah, A.; Xu, D.; Gao, Z. Active Disturbance Rejection Control of LCL Filtered Grid-Connected Inverter using Padé Approximation. IEEE Trans. Ind. Appl. 2018, 54, 6179–6186. [Google Scholar] [CrossRef]
- Huang, C.; Zhou, X.; Ran, X.; Wang, J.; Chen, H.; Deng, W. Adaptive cylinder vector particle swarm optimization with differential evolution for UAV path planning. Eng. Appl. Artif. Intell. 2023, 121, 105942. [Google Scholar] [CrossRef]
- Zhao, H.M.; Zhang, P.P.; Chen, B.J.; Chen, H.; Deng, W. Bearing fault diagnosis using transfer learning and optimized deep belief network. Meas. Sci. Technol. 2022, 33, 065009. [Google Scholar] [CrossRef]
- Jin, T.; Gao, S.; Xia, H.; Ding, H. Reliability analysis for the fractional-order circuit system subject to the uncertain random fractional-order model with Caputo type. J. Adv. Res. 2021, 32, 15–26. [Google Scholar] [CrossRef] [PubMed]
- Ren, Z.; Han, X.; Skjetne, R.; Leira, B.J.; Sævik, S.; Zhu, M. Data-driven simultaneous identification of the 6DOF dynamic model and wave load for a ship in waves. Mech. Syst. Signal Process. 2023, 184, 109422. [Google Scholar] [CrossRef]
- Wu, E.Q.; Zhou, M.; Hu, D.; Zhu, L.; Tang, Z.; Qiu, X.-Y.; Deng, P.-Y.; Zhu, L.-M.; Ren, H. Self-paced dynamic infinite mixture model for fatigue evaluation of pilots’ brain. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef]
- Jin, T.; Xia, H. Lookback option pricing models based on the uncertain fractional-order differential equation with Caputo type. J. Ambient. Intell. Humaniz. Comput. 2021, 1–14. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.J.; Gao, X.Z.; Zhao, H.M. An enhanced MSIQDE algorithm with novel multiple strategies for global optimiza-tion problems. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1578–1587. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Du, C.; Fan, X.; Cui, L.; Chen, H. Custom-molded offloading footwear effectively prevents recurrence and amputation, and lowers mortality rates in high-risk diabetic foot patients: A multicenter, prospective observational study. Diabetes Metab. Syndr. Obes. Targets Ther. 2022, 15, 103–109. [Google Scholar] [CrossRef] [PubMed]
- Deng, W.; Xu, J.; Zhao, H.; Song, Y. A novel gate resource allocation method using improved PSO-based QEA. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Jin, T.; Zhu, Y.; Shu, Y.; Cao, J.; Yan, H.; Jiang, D. Uncertain optimal control problem with the first hitting time objective and application to a portfolio selection model. J. Intell. Fuzzy Syst. 2023, 44, 1585–1599. [Google Scholar] [CrossRef]
- Chen, H.L.; Li, C.Y.; Mafarja, M.; Heidari, A.A.; Chen, Y.; Cai, Z. Slime mould algorithm: A comprehensive review of recent variants and applications. Int. J. Syst. Sci. 2023, 54, 204–235. [Google Scholar] [CrossRef]
- Zhou, X.B.; Ma, H.J.; Gu, J.G.; Chen, H.L.; Deng, W. Parameter adaptation-based ant colony optimization with dynamic hybrid mechanism. Eng. Appl. Artif. Intell. 2022, 114, 105139. [Google Scholar] [CrossRef]
- Deng, W.; Zhang, L.; Zhou, X.; Zhou, Y.; Sun, Y.; Zhu, W.; Chen, H.; Deng, W.; Chen, H.; Zhao, H. Multi-strategy particle swarm and ant colony hybrid optimization for airport taxiway planning problem. Inf. Sci. 2022, 612, 576–593. [Google Scholar] [CrossRef]
- Shao, H.; Li, W.; Cai, B.; Wan, J.; Xiao, Y.; Yan, S. Dual-threshold attention-guided GAN and limited infrared thermal images for rotating machinery fault diagnosis under speed fluctuation. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]
- Deng, W.; Shang, S.; Cai, X.; Zhao, H.; Zhou, Y.; Chen, H.; Deng, W. Quantum differential evolution with cooperative coevolution framework and hybrid mutation strategy for large scale optimization. Knowl.-Based Syst. 2021, 224, 107080. [Google Scholar] [CrossRef]
- Bi, J.; Zhou, G.; Zhou, Y.; Luo, Q.; Deng, W. Artificial Electric Field Algorithm with Greedy State Transition Strategy for Spherical Multiple Traveling Salesmen Problem. Int. J. Comput. Intell. Syst. 2022, 5, 15. [Google Scholar] [CrossRef]
- Xiao, Y.; Shao, H.; Han, S.; Huo, Z.; Wan, J. Novel joint transfer network for unsupervised bearing fault diagnosis from simulation domain to experimental domain. IEEE-ASME Trans. Mechatron. 2022, 27, 5254–5263. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.; Song, Y.; Zhao, H. Differential evolution algorithm with wavelet basis function and optimal mutation strategy for complex optimization problem. Appl. Soft Comput. 2021, 100, 106724. [Google Scholar] [CrossRef]
- Deng, W.; Liu, H.; Xu, J.; Zhao, H.; Song, Y. An improved quantum-inspired differential evolution algorithm for deep belief network. IEEE Trans. Instrum. Meas. 2020, 69, 7319–7327. [Google Scholar] [CrossRef]
- Chen, M.; Shao, H.; Dou, H.; Li, W.; Liu, B. Data augmentation and intelligent fault diagnosis of planetary gearbox using ILoFGAN under extremely limited sample. IEEE Trans. Reliab. 2022, 1–9. [Google Scholar] [CrossRef]
- Hu, Y.; Zheng, J.; Zou, J.; Jiang, S.; Yang, S. Dynamic multi-objective optimization algorithm based decomposition and preference. Inf. Sci. 2021, 571, 175–190. [Google Scholar] [CrossRef]
- Zheng, J.; Zhang, Z.; Zou, J.; Yang, S.; Ou, J.; Hu, Y. A dynamic multi-objective particle swarm optimization algorithm based on adversarial decomposition and neighborhood evolution. Swarm Evol. Comput. 2022, 69, 100987. [Google Scholar] [CrossRef]
- Pan, H.; Teng, Q.; Wu, D. MESO-based robustness voltage sliding mode control for AC islanded microgrid. Chin. J. Electr. Eng. 2020, 6, 83–93. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, C. Observer-based terminal sliding mode control of non-affine nonlinear systems: Finite-time approach. J. Frankl. Inst. 2018, 355, 7985–8004. [Google Scholar] [CrossRef]
- Yu, H.G.; Kang, Z.J. Time-varying parameter second-order extended state observer based on hyperbolic tangent function. Control. Theory Appl. 2016, 33, 531–533. [Google Scholar]
- Chang, S.R.; Feng, W. Matrix Analysis, Beijing; Beijing Institute of Technology Press: Beijing, China, 2005; pp. 119–120. [Google Scholar]
- Yang, Z.D.; He, W.Q. Bandwidth Based Stability Analysis of Active Disturbance Rejection Control for Nonlinear Uncertain Systems. J. Syst. Sci. Complex. 2018, 6, 1449–1468. [Google Scholar]
- Boukattaya, M.; Mezghani, N. Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems. ISA Trans. 2018, 77, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Li, S.B.; Li, K.Q. Nonsingular fast terminal-sliding-mode control method and its application on vehicular following system. Control. Theory Appl. 2010, 27, 543–550. [Google Scholar]
- Chen, Z.; Chen, Y.; Guerrero, M.; Kuang, H.; Huang, Y.; Zhou, L.; Luo, A. Generalized coupling resonance modeling, analysis, and active damping of multi-parallel inverters in microgrid operating in grid-connected mode. J. Mod. Power Syst. Clean Energy 2016, 4, 63–75. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameters | Nominal Values |
|---|---|---|
| DC link voltage | ||
| Inverter switching | ||
| Parasitic resistance | ||
| Filter inductor | ||
| Filter capacitor | ||
| Linear load | ||
| Nonlinear load |
| Parameters | Nominal Values |
|---|---|
| 0.001, 0.04, 12 | |
| 0.3 | |
| 5, 3, 9, 7 | |
| 0.05, 0.02 | |
| 5, 1, 60 | |
| 0.82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Xu, D.; Ma, J.; Chen, H. A New Fast Control Strategy of Terminal Sliding Mode with Nonlinear Extended State Observer for Voltage Source Inverter. Sensors 2023, 23, 3951. https://doi.org/10.3390/s23083951
Zhang C, Xu D, Ma J, Chen H. A New Fast Control Strategy of Terminal Sliding Mode with Nonlinear Extended State Observer for Voltage Source Inverter. Sensors. 2023; 23(8):3951. https://doi.org/10.3390/s23083951
Chicago/Turabian StyleZhang, Chunguang, Donglin Xu, Jun Ma, and Huayue Chen. 2023. "A New Fast Control Strategy of Terminal Sliding Mode with Nonlinear Extended State Observer for Voltage Source Inverter" Sensors 23, no. 8: 3951. https://doi.org/10.3390/s23083951
APA StyleZhang, C., Xu, D., Ma, J., & Chen, H. (2023). A New Fast Control Strategy of Terminal Sliding Mode with Nonlinear Extended State Observer for Voltage Source Inverter. Sensors, 23(8), 3951. https://doi.org/10.3390/s23083951