
Research on Omnidirectional Stereo Measurement Using Convex Mirrors and Vertical Disparity


Abstract
:1. Introduction
1.1. Backgrounds
1.2. Existing Technology
2. Materials and Methods
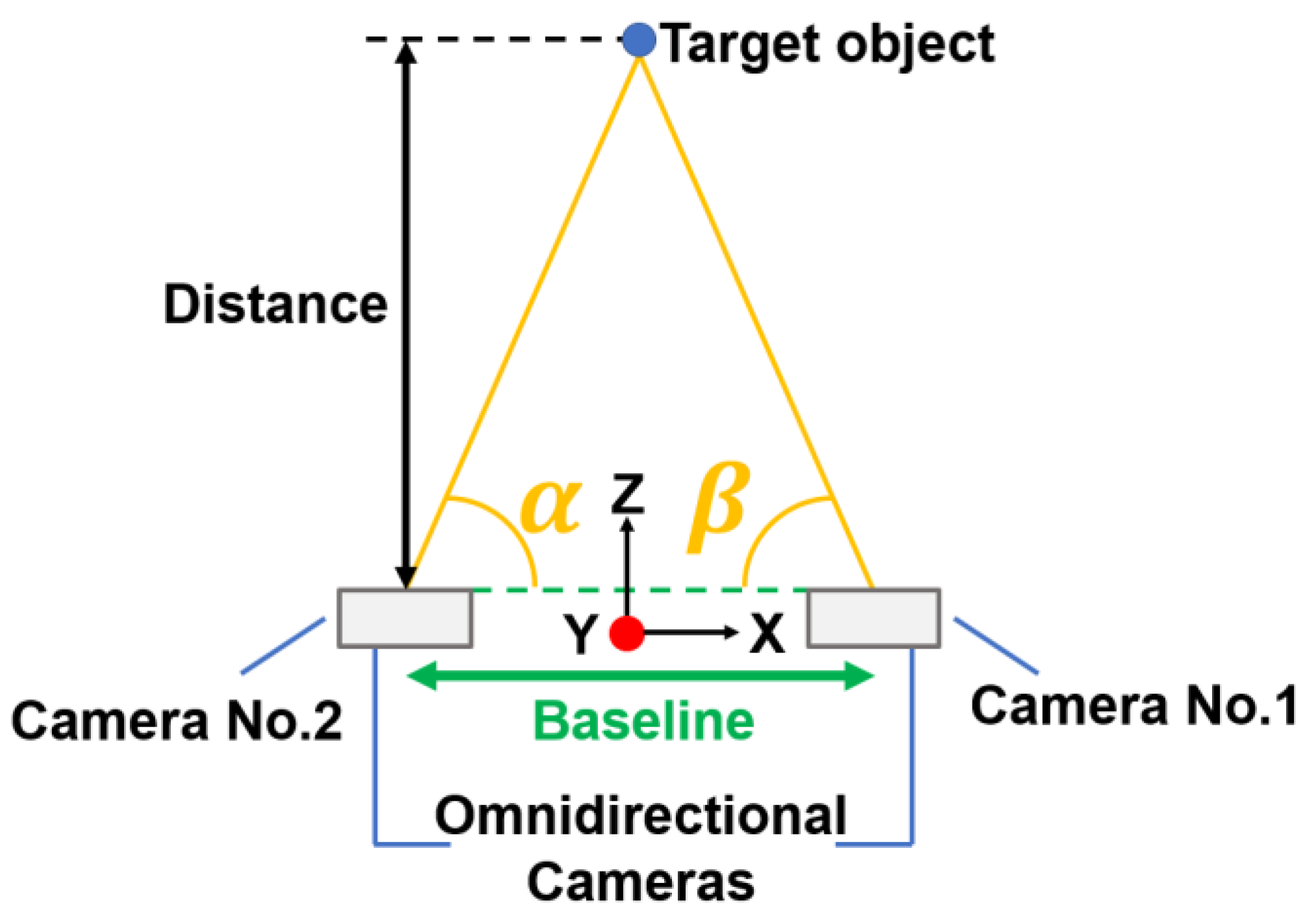
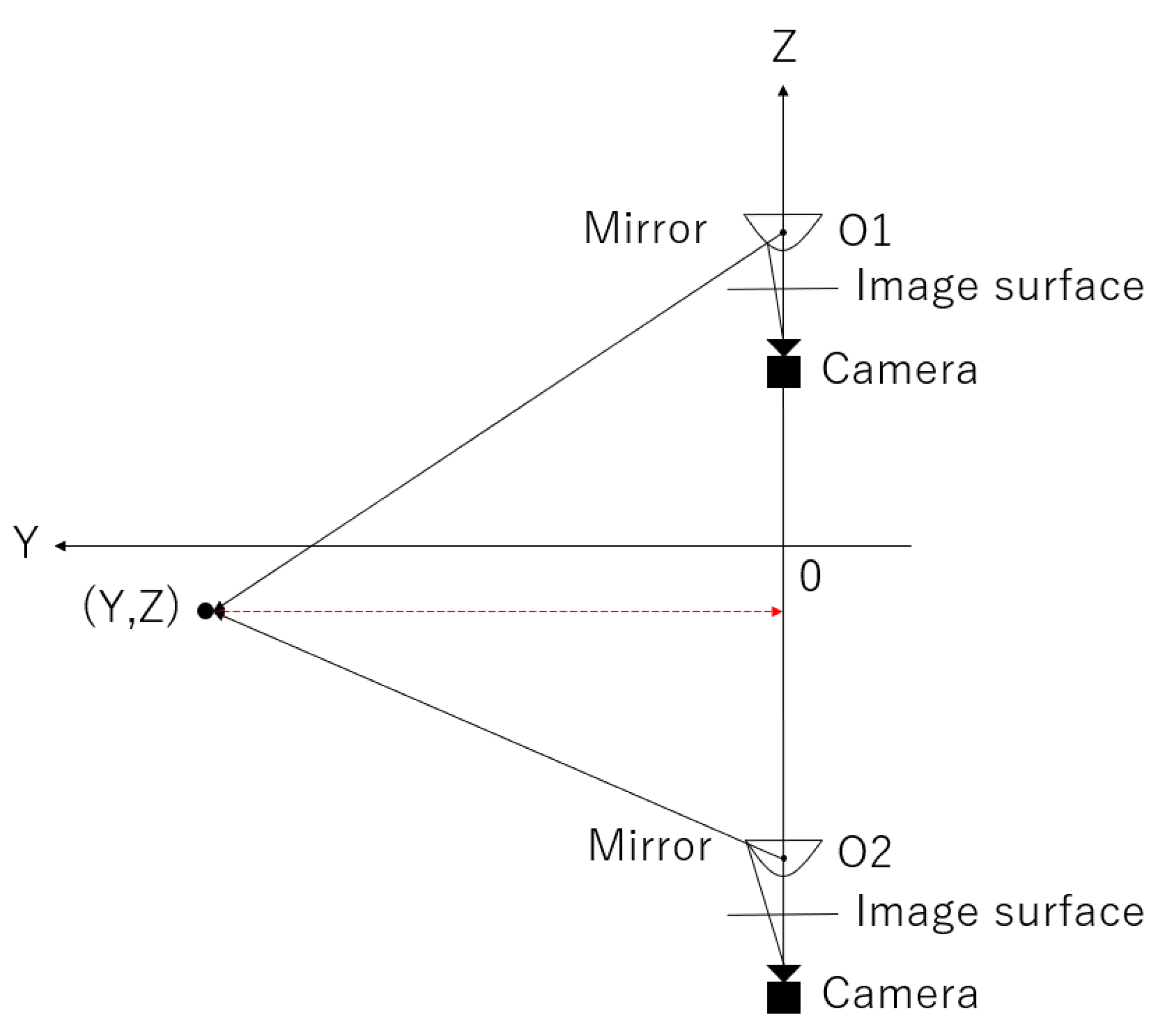
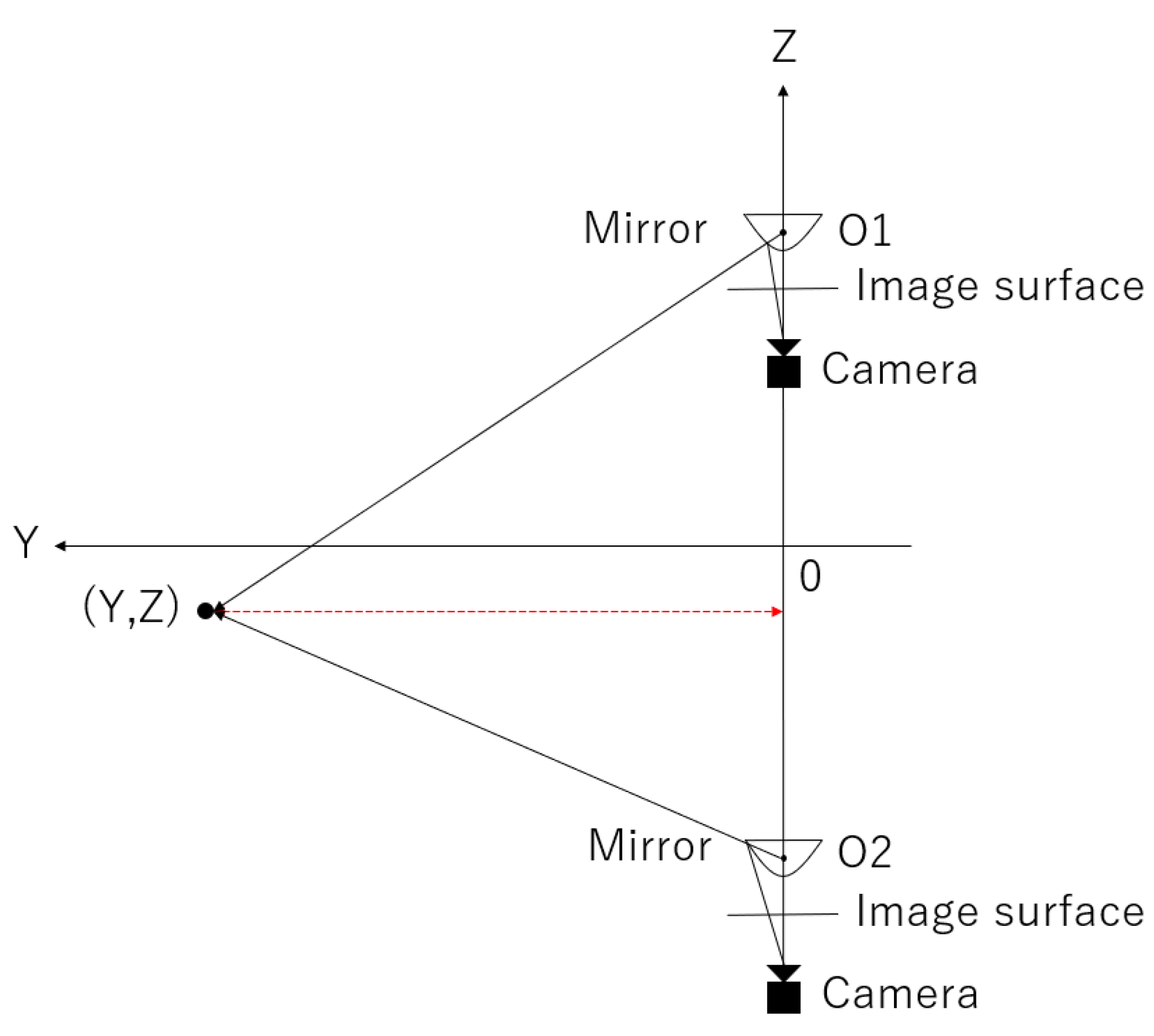
2.1. Proposed System Configuration
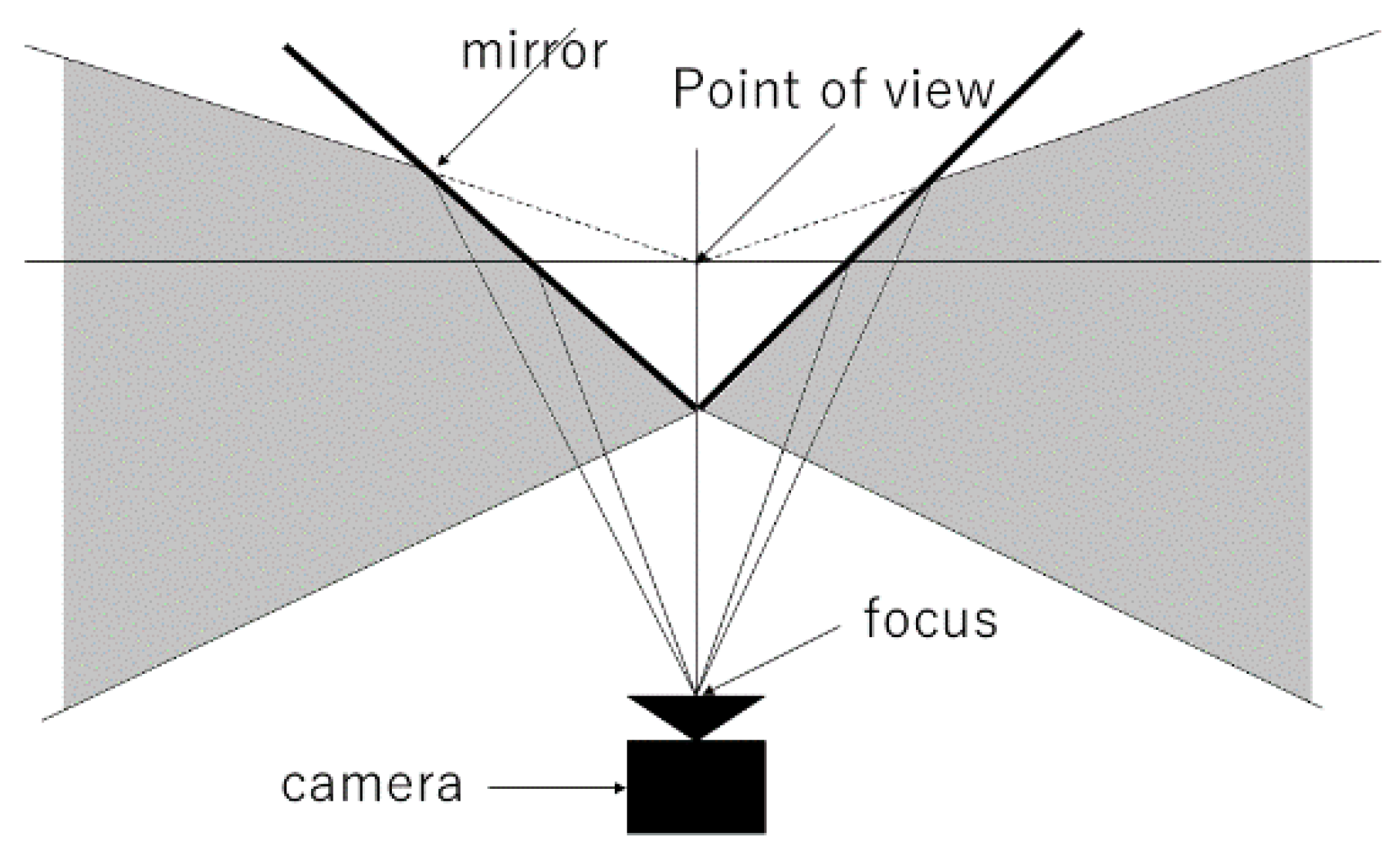
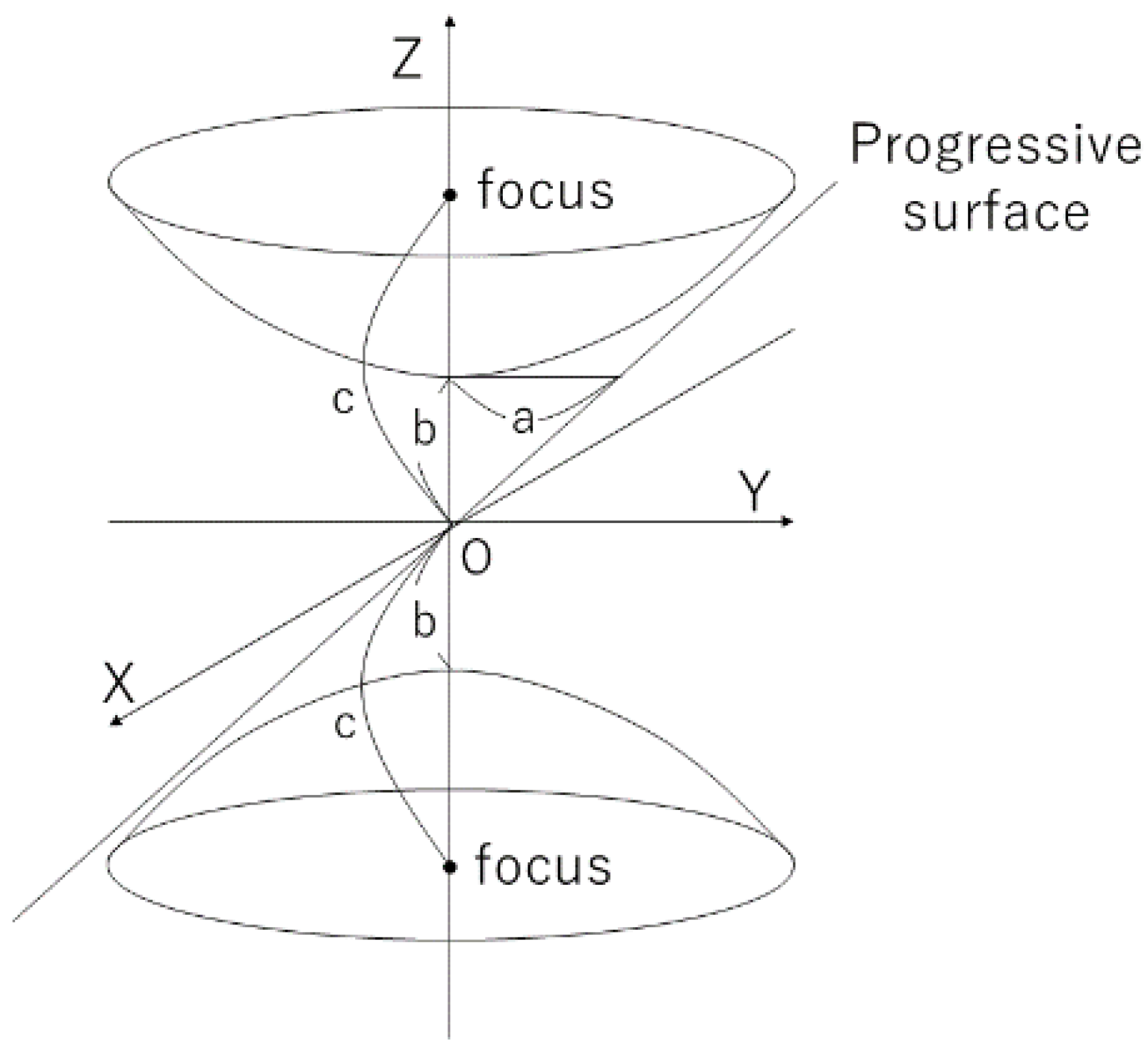
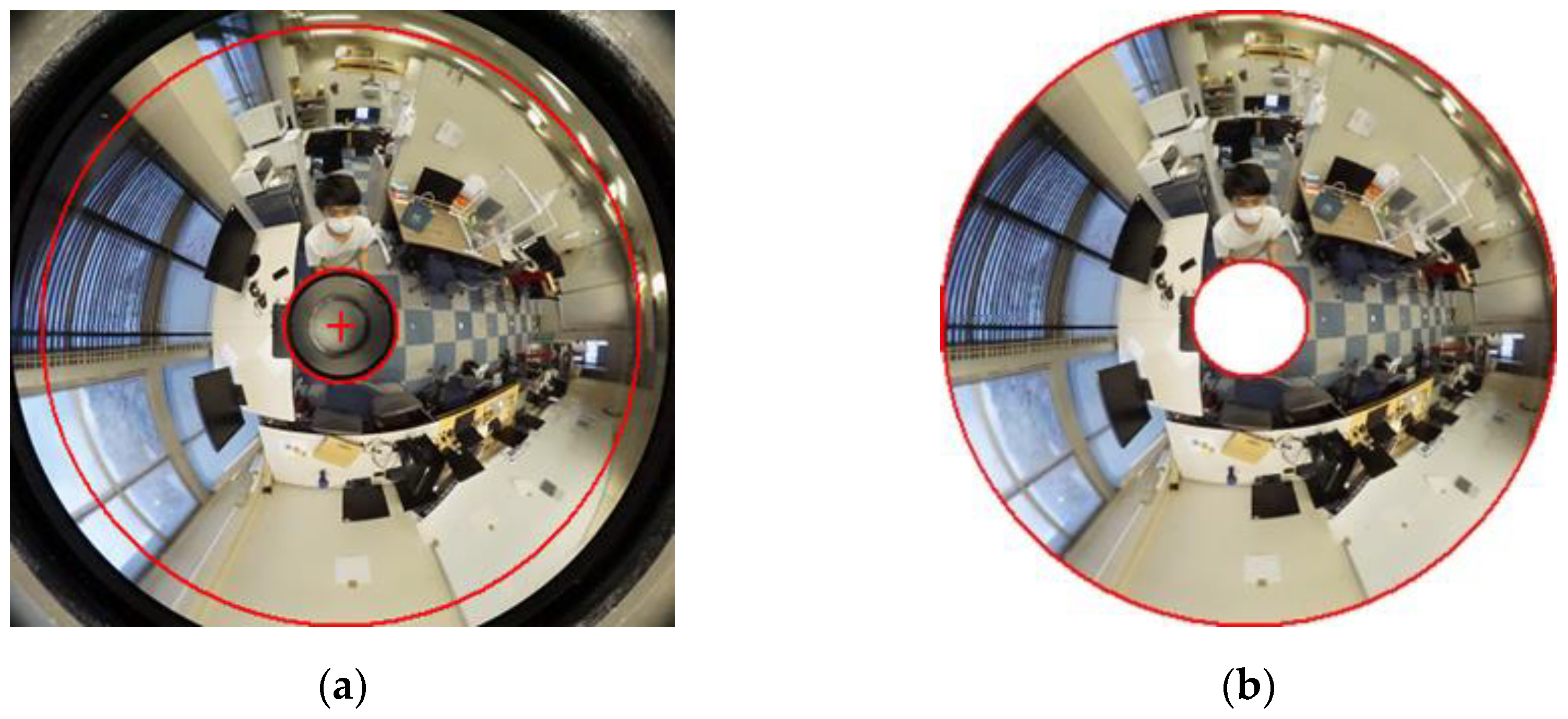
2.2. Omnidirectional Visual Sensor
2.3. Panoramic Expansion
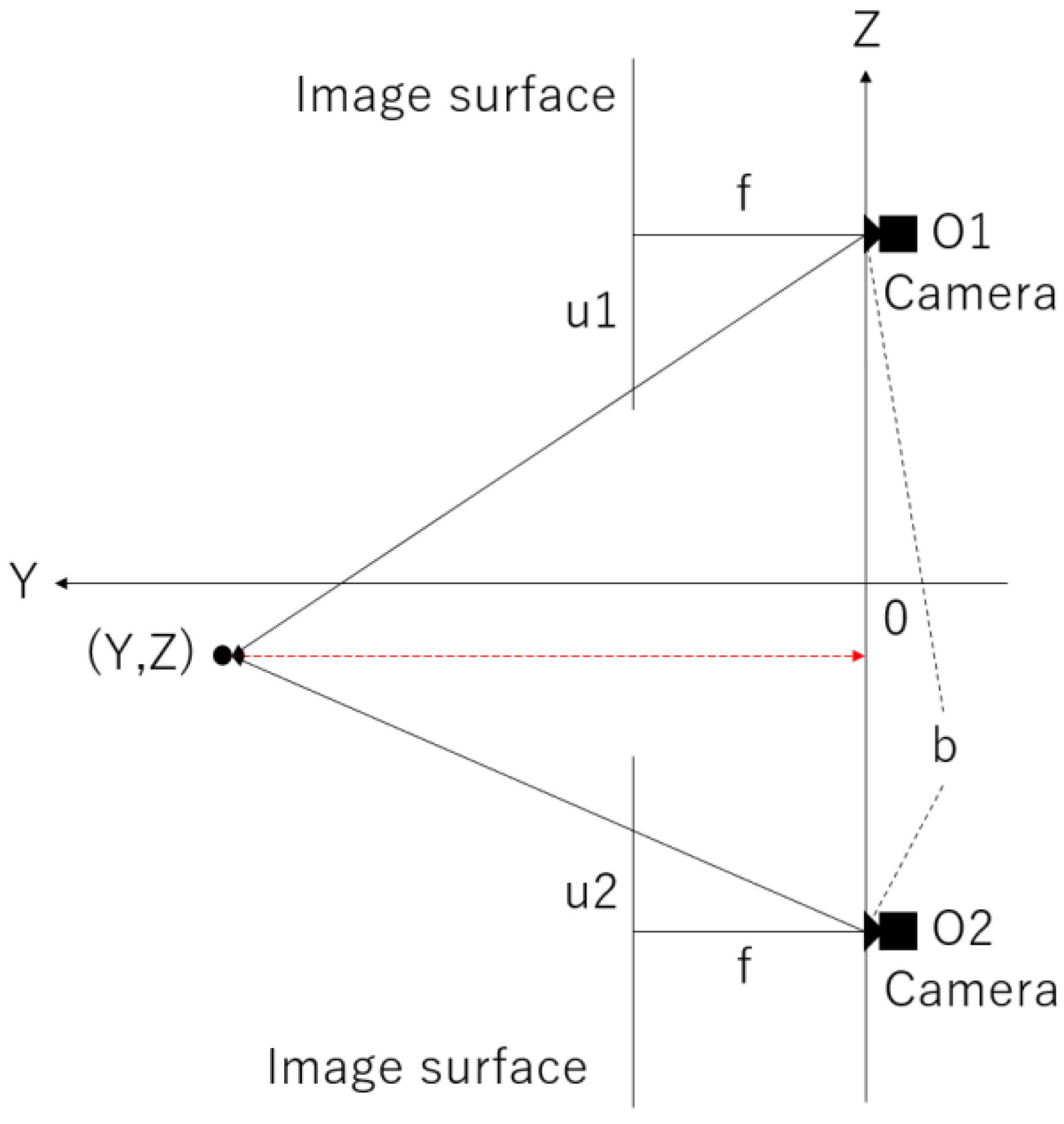
2.4. Vertical Disparity Stereo Matching
3. Results
3.1. Purpose of the Experiment
3.2. Measurement Experiment
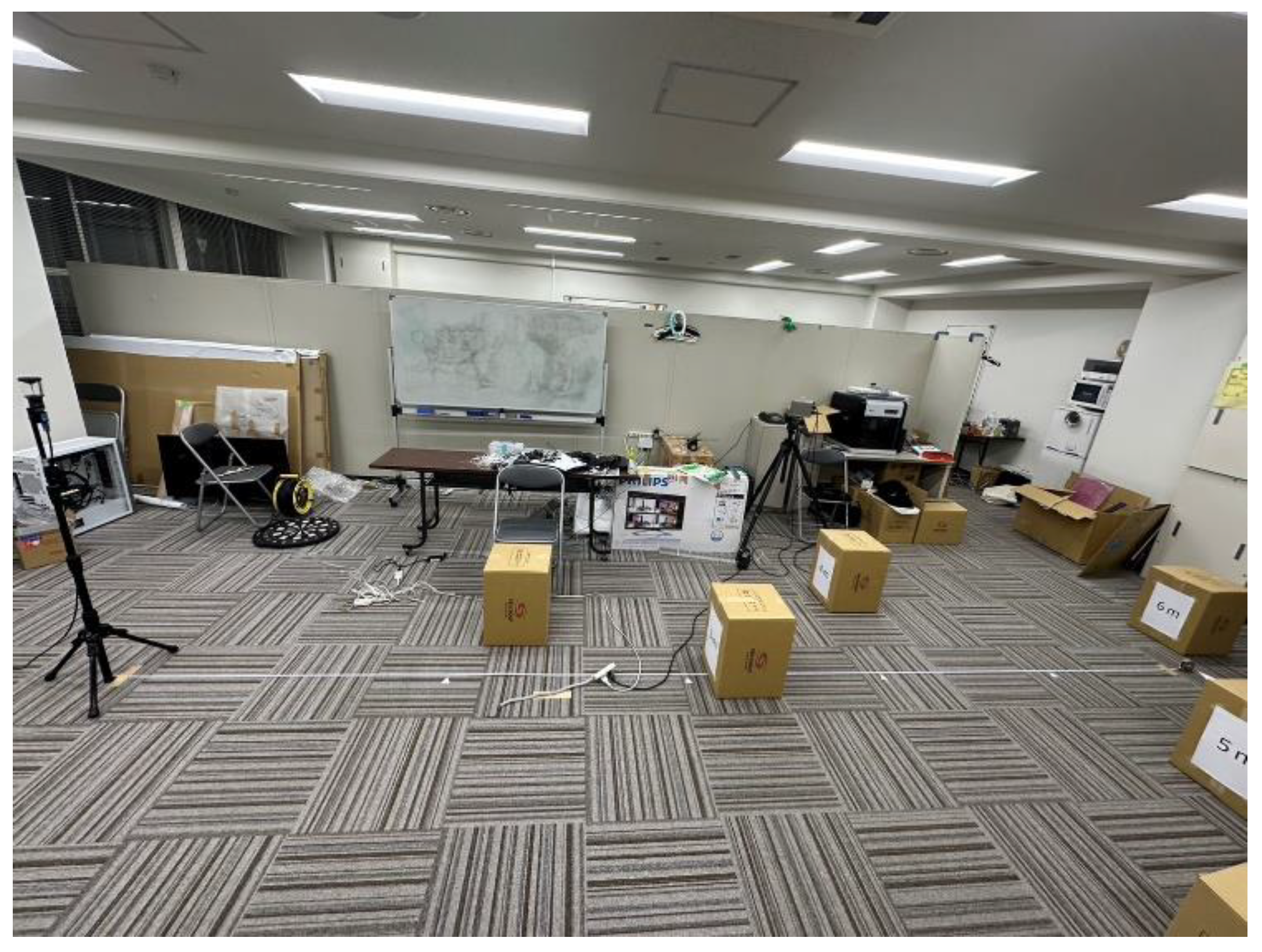
3.2.1. Experimental Method
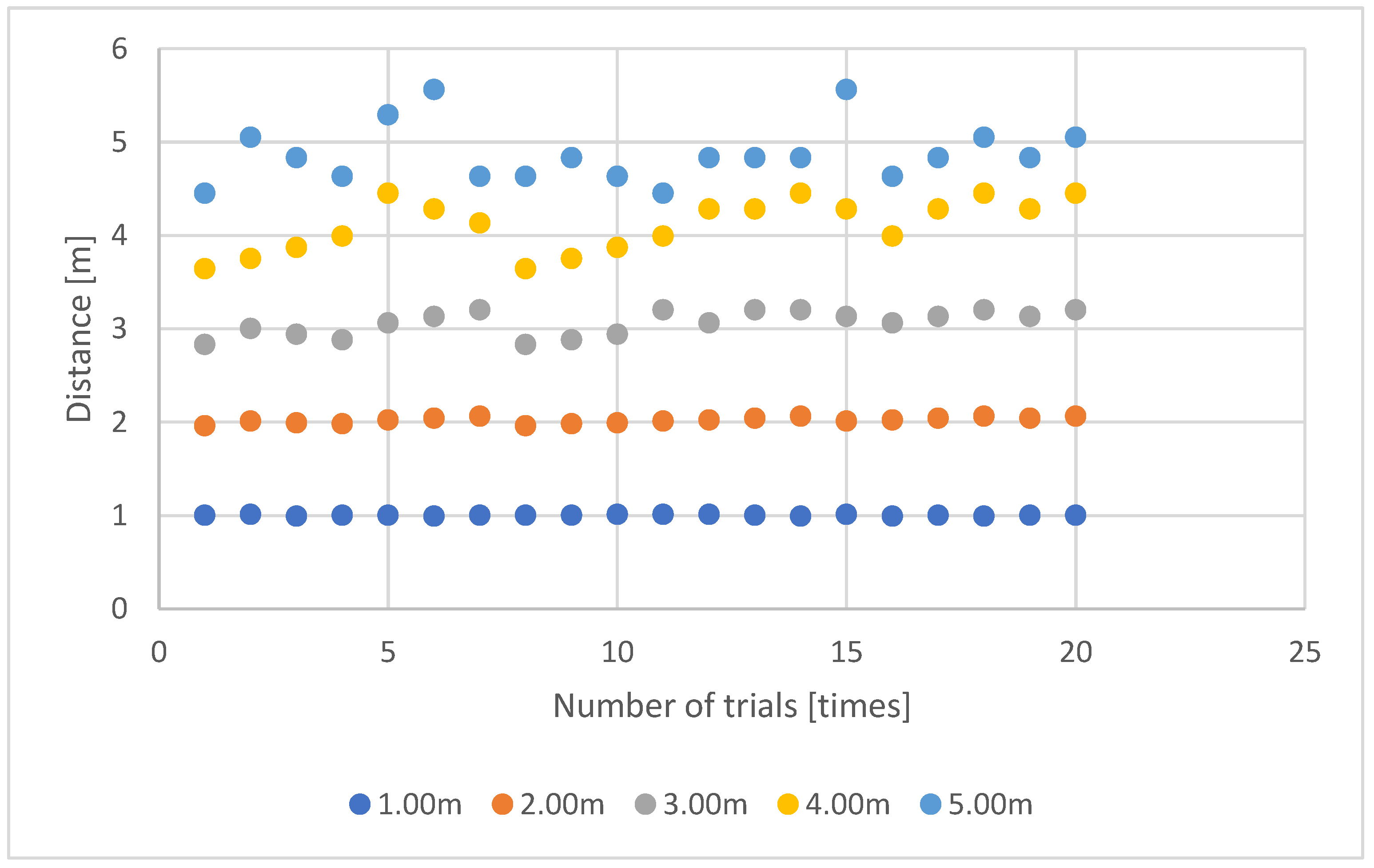
3.2.2. Experimental Results
3.2.3. Consideration
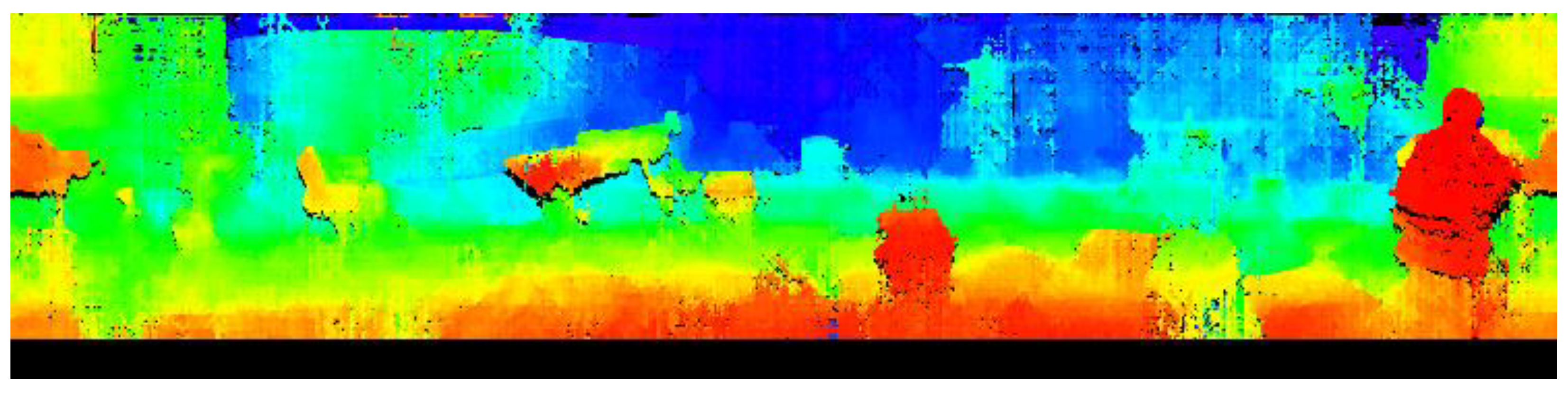
3.3. Depth Image Generation Experiment
3.3.1. Experimental Method
3.3.2. Experimental Results
3.3.3. Consideration
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- BellaBot. Pudu Robotics. Available online: https://www.pudurobotics.com/jp/product/detail/bellabot (accessed on 19 February 2023).
- Nuro. Helping the Heroes during COVID-19. Available online: https://medium.com/nuro/helping-the-heroes-during-covid-19-49c189f216a2 (accessed on 19 February 2023).
- TOYOTA. e-Palette. Available online: https://global.toyota/jp/newsroom/corporate/29933339.html (accessed on 19 February 2023).
- Scharstein, D.; Szeliski, R. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Iida, H.; Ji, Y.; Umeda, K.; Ohashi, A.; Fukuda, D.; Kaneko, S.; Murayama, J.; Uchida, Y. High-accuracy Range Image Generation by Fusing Binocular and Motion Stereo Using Fisheye Stereo Camera. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020. [Google Scholar]
- Won, C.; Ryu, J.; Lim, J. End-to-End Learning for Omnidirectional Stereo Matching With Uncertainty Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 3850–3862. [Google Scholar] [CrossRef] [PubMed]
- Schönbein, M.; Kitt, B.; Lauer, M. Environmental Perception for Intelligent Vehicles Using Catadioptric Stereo Vision Systems. In Proceedings of the ECMR, Örebro, Sweden, 7–9 September 2011. [Google Scholar]
- Schönbein, M.; Geiger, A. Omnidirectional 3d reconstruction in augmented manhattan worlds. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Aoki, T.; Mengcheng, S.; Watanabe, H. Position Estimation and Distance Measurement from Omnidirectional Cameras. 80th Inf. Process. Soc. Jpn. 2018, 2018, 265–266. [Google Scholar]
- Tanaka, S.; Inoue, Y. Outdoor Human Detection with Stereo Omnidirectional Cameras. J. Robot. Mechatron. 2020, 32, 1193–1199. [Google Scholar] [CrossRef]
- Aghayari, S.; Saadatseresht, M.; Omidalizarandi, M.; Neumann, I. Geometric calibration of full spherical panoramic Ricoh-Theta camera. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences IV-1/W1 (2017), Hannover, Germany, 6–9 June 2017; Volume 4, pp. 237–245. [Google Scholar]
- Yamazawa, K.; Yagi, Y.; Yachida, M. Omnidirectional imaging with hyperboloidal projection. In Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’93), Yokohama, Japan, 26–30 July 1993; Volume 2. [Google Scholar]
- Hirschmuller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 2. [Google Scholar]
- Cheng, X.; Zhong, Y.; Harandi, M.; Dai, Y.; Chang, X.; Li, H.; Drummond, T.; Ge, Z. Hierarchical neural architecture search for deep stereo matching. Adv. Neural Inf. Process. Syst. 2020, 33, 22158–22169. [Google Scholar]
- Lipson, L.; Teed, Z.; Deng, J. Raft-stereo: Multilevel recurrent field transforms for stereo matching. In Proceedings of the 2021 International Conference on 3D Vision (3DV), London, UK, 1–3 December 2021. [Google Scholar]
- Li, J.; Wang, P.; Xiong, P.; Cai, T.; Yan, Z.; Yang, L.; Liu, J.; Fan, H.; Liu, S. Practical stereo matching via cascaded recurrent network with adaptive correlation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Equipment | Specification | |
|---|---|---|
| Camera | Name of maker | The Imaging Source (New Taipei City, Taiwan) |
| Name of product | DFK 33 UX 183 | |
| Name of sensor | Sony CMOS Exmor IMX 183 CQ | |
| Resolution | 5472 × 3648 | |
| Lens | Name of maker | Shodensha Co., Ltd. (Osaka, Japan) |
| Name of product | SM 1226–MP 20 | |
| Focal length | 12 mm | |
| Camera aperture range | F 2.6–F 16 | |
| Convex mirror | Name of maker | Vstone Co., Ltd. (Osaka, Japan) |
| Name of product | VS–C 450 MR | |
| Mirror parameter | 29 mm | |
| Mirror parameter | 40 mm | |
| Mirror parameter | 49.4 mm | |
| Diameter of mirror | 45 mm | |
| Distance between Omnidirectional Stereo Camera and Object (m) | Distance Measurement Results (m) | Mean Absolute Error (m) | Average Relative Error (%) | ||||
|---|---|---|---|---|---|---|---|
| Proposed Method | Conventional Method | Proposed Method | Conventional Method | Proposed Method | Conventional Method | Proposed Method | Conventional Method |
| 1.00 | 1.00 | 1.20 | 0.00 | 0.20 | 0.0 | 20.0 | |
| 2.00 | 2.02 | 1.60 | 0.02 | 0.40 | 1.0 | 20.0 | |
| 3.00 | 3.06 | 2.90 | 0.06 | 0.10 | 2.0 | 3.3 | |
| 4.00 | 4.10 | 5.60 | 0.10 | 1.60 | 2.5 | 40.0 | |
| 5.00 | 4.87 | 6.30 | 0.13 | 1.30 | 2.6 | 26.0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozawa, Y.; Kimura, S.; Zhu, Y.; Kurihara, A.; Bao, Y. Research on Omnidirectional Stereo Measurement Using Convex Mirrors and Vertical Disparity. Sensors 2023, 23, 3243. https://doi.org/10.3390/s23063243
Ozawa Y, Kimura S, Zhu Y, Kurihara A, Bao Y. Research on Omnidirectional Stereo Measurement Using Convex Mirrors and Vertical Disparity. Sensors. 2023; 23(6):3243. https://doi.org/10.3390/s23063243
Chicago/Turabian StyleOzawa, Yuki, Shingo Kimura, Yiling Zhu, Atsutoshi Kurihara, and Yue Bao. 2023. "Research on Omnidirectional Stereo Measurement Using Convex Mirrors and Vertical Disparity" Sensors 23, no. 6: 3243. https://doi.org/10.3390/s23063243
APA StyleOzawa, Y., Kimura, S., Zhu, Y., Kurihara, A., & Bao, Y. (2023). Research on Omnidirectional Stereo Measurement Using Convex Mirrors and Vertical Disparity. Sensors, 23(6), 3243. https://doi.org/10.3390/s23063243