
Data Dissemination in VANETs Using Particle Swarm Optimization



Abstract
:1. Introduction
- To create an effective data dissemination technique for broadcasting in the VANET;
- To create a new appliance for VANET broadcasting that will increase the packet delivery ratio;
- To improve the fitness function and improve the selection of better-optimized solutions in VANET broadcasting by using the Particle Swarm optimization technique.
2. Literature Review
2.1. Particle Swarm Optimization
2.2. Data Dissemination
3. Proposed Protocol
3.1. Problem Statement
3.2. Proposed Solution
3.3. Network Configuration
4. Methodology
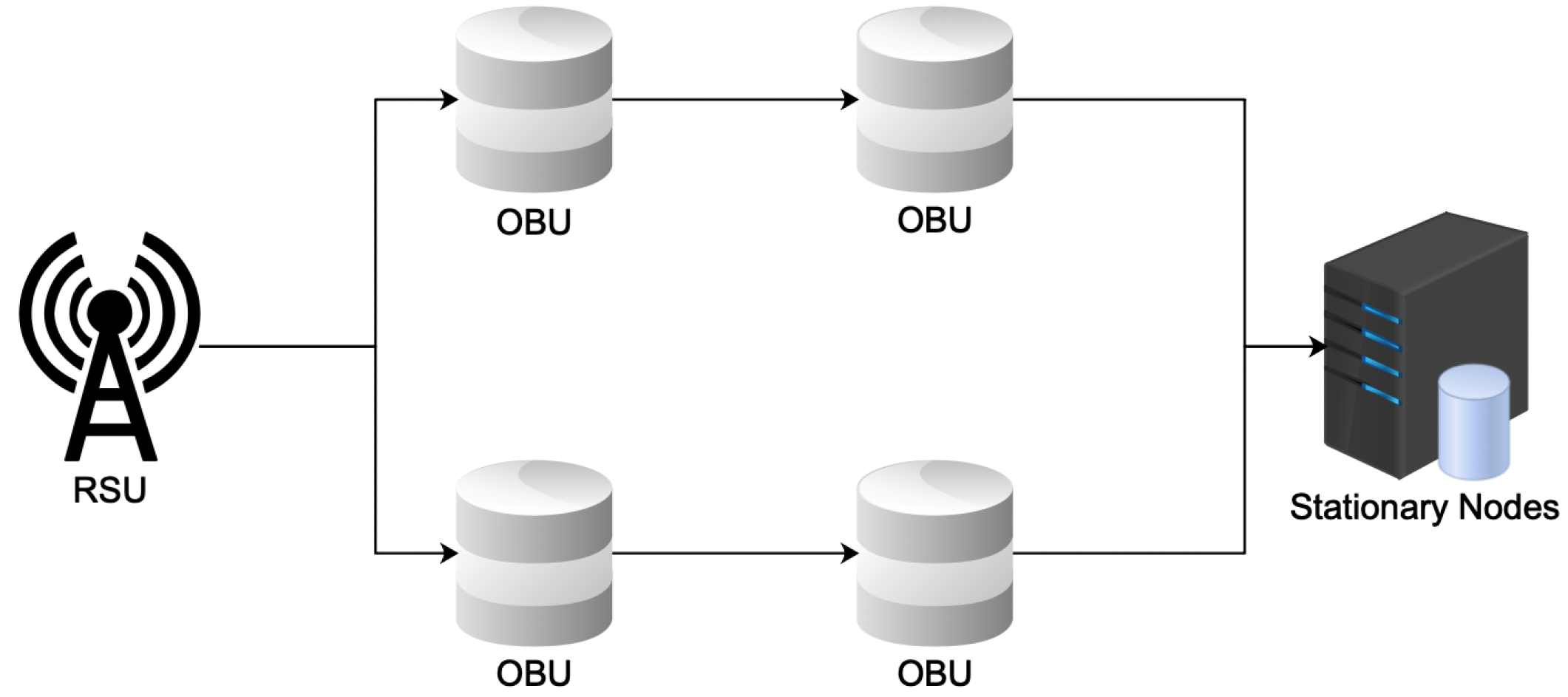
- We start with n vehicle nodes, some RSUs and OBUs connected in the same network. The message forwarding process between RSU and OBUs occurs when the vehicles are moving in the same area zone.
- These messages are divided into two parts which can be distinguished by their weights. If the weight = 1, then it is the emergency message which needs immediate assistance. Source or destination ends may be mobile nodes which are referred to as OBUs. On the other hand, the messages with weight = 0 will directly transfer to the FIFO queue for further data transmission. For these message transmissions, multiple routes were found using TMR [12].
- Vehicles send both routine and urgent communications to RSUs, which then transmit them to other vehicles [33]. In the case of unicast communication, TMR, which is a multipath routing technique based on Round Trip Time (), is utilized, and it is primarily concerned with cutting down the end-to-end time delay.
- We assume that the initial position and velocity can be determined using the following equations:Each node that joins the network should announce its . PSO is applied on routes returned by TMR. For each TMR’s route, node i will send hello messages to its neighbor nodes j recorded in the TMR routes. is the time between one node and its neighbor node.Therefore, the Euclidean distance between nodes i and j, for a given route, can be calculated as:where is the velocity of the neighbor vehicle j compared to previous node i. Alternatively, inter-distance between nodes can be calculated as in [34]. Hence, the best position between one node and its adjacent l node in a given route out of k TMR routes is:The is calculated with the maximum distance between the source node and the nodes in a given TMR route to consider the closest node to the destination vehicle/RSU.From one iteration to the next, a swarm of particles (nodes) updates their relative positions, giving the PSO algorithm the boost it needs to properly search. Each particle advances toward its previous personal best position to achieve the best result.
- The optimization function is defined in terms of fitness function (FF). This FF is computed to determine the next forwarding vehicle that uses parameters such as the position of the vehicle, its velocity, and distance to its adjacent vehicle. The source node finds the adjacent node closer to the destination, and its fitness value is determined. The adjacent vehicle having the highest fitness value is selected as the next forwarding node and the packet is forwarded to it. The process is repeated iteratively for all TMR routes until the packet reaches the destination node [35]. The fitness function is calculated for each vehicle according to its position and velocity. FF is represented in Equation (3) given below [36]:where are the weights, l is the number of all nodes in each TMR’s route, and are two adjacent nodes.
- The routes were given using TMR as input to look for the best solution.
- Every vehicle has its distinct position (quality of solution) and velocity.
- Each vehicle selects the best position and uses the velocity of the vehicle to move towards a new best position. The adjustment of the position to the global optimum is made feasible using the best position of individuals and the whole swarm.
- At each iteration, each vehicle updates its velocity and position.
- For each vehicle, the fitness value of each vehicle is computed and compared with the fitness value in the memory. If the current fitness value is greater, then it acts as a global optimum.
- The procedure stops after the last iteration. The best solution is considered the global best.
- A vehicle with the maximum global optimum is the next forwarding node and the packet is forwarded towards it.
- The process is repeated till the packet reaches the destination.
| Algorithm 1: Message forwarding process. |
Initialization: Array of k routes by TMR is Best position Current position & velocity of vehicle & Next, position & velocity of vehicle & |
5. Performance Evaluation
5.1. Simulation Parameters
5.2. Performance Metrics
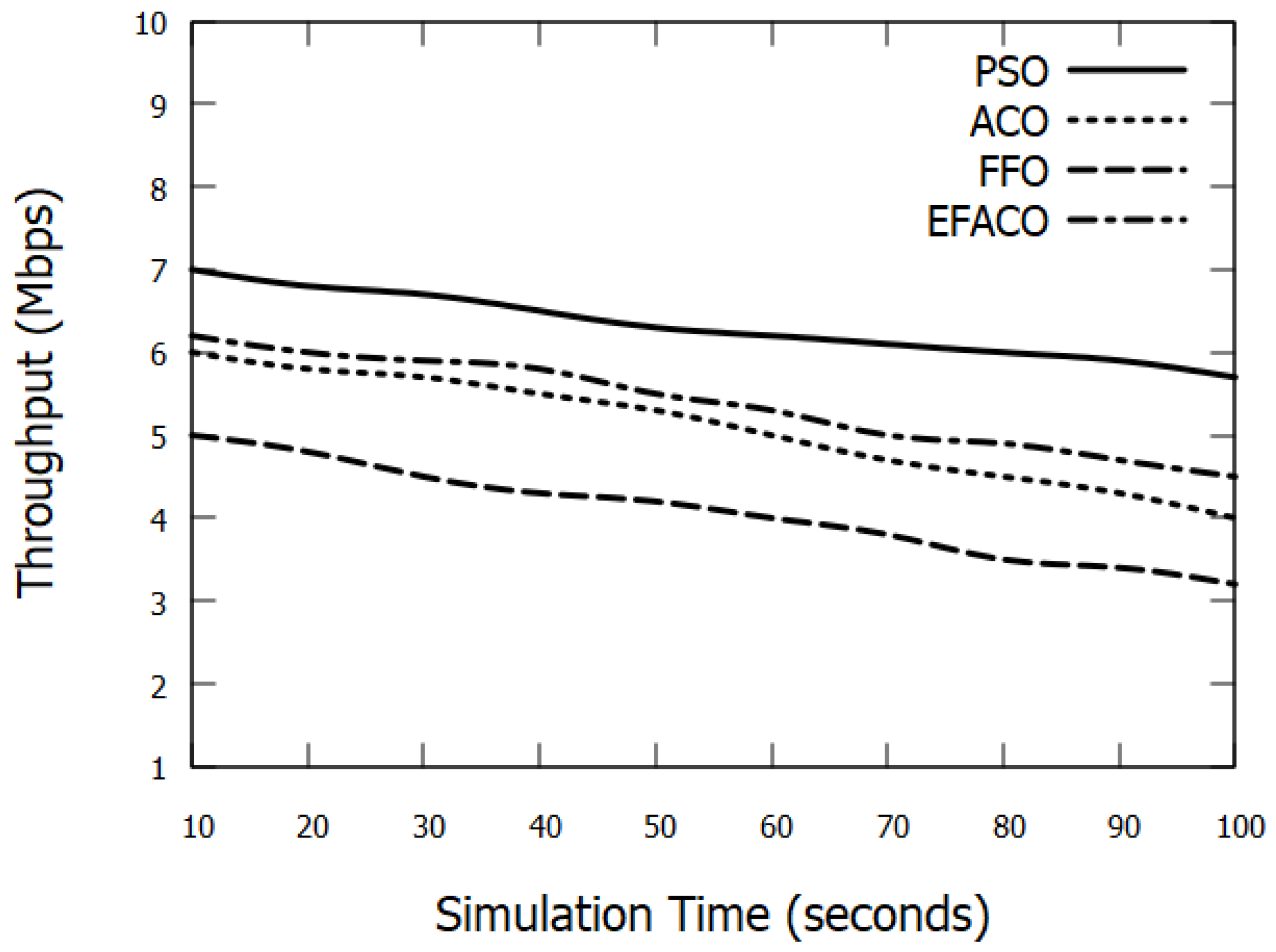
5.2.1. Throughput
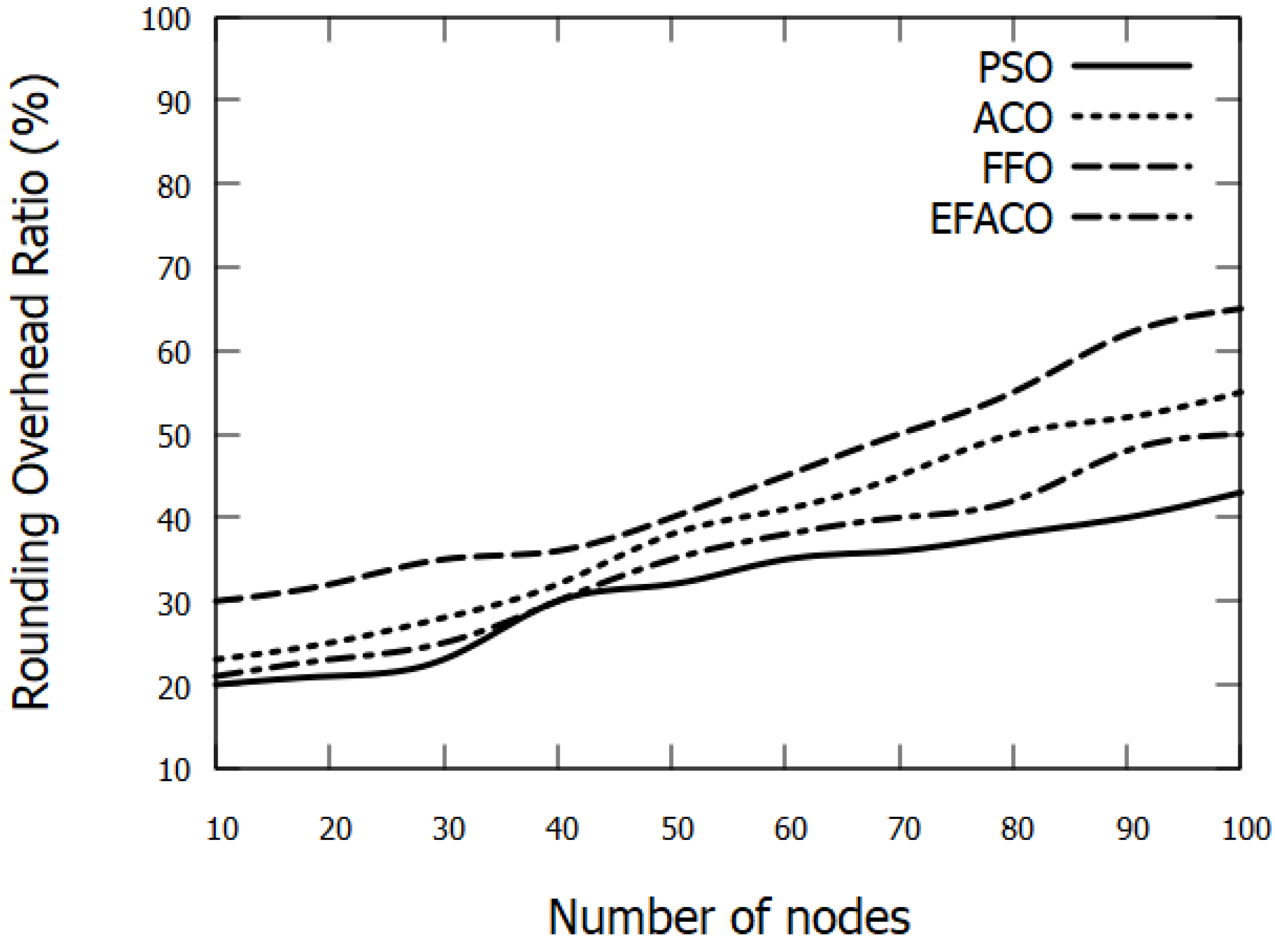
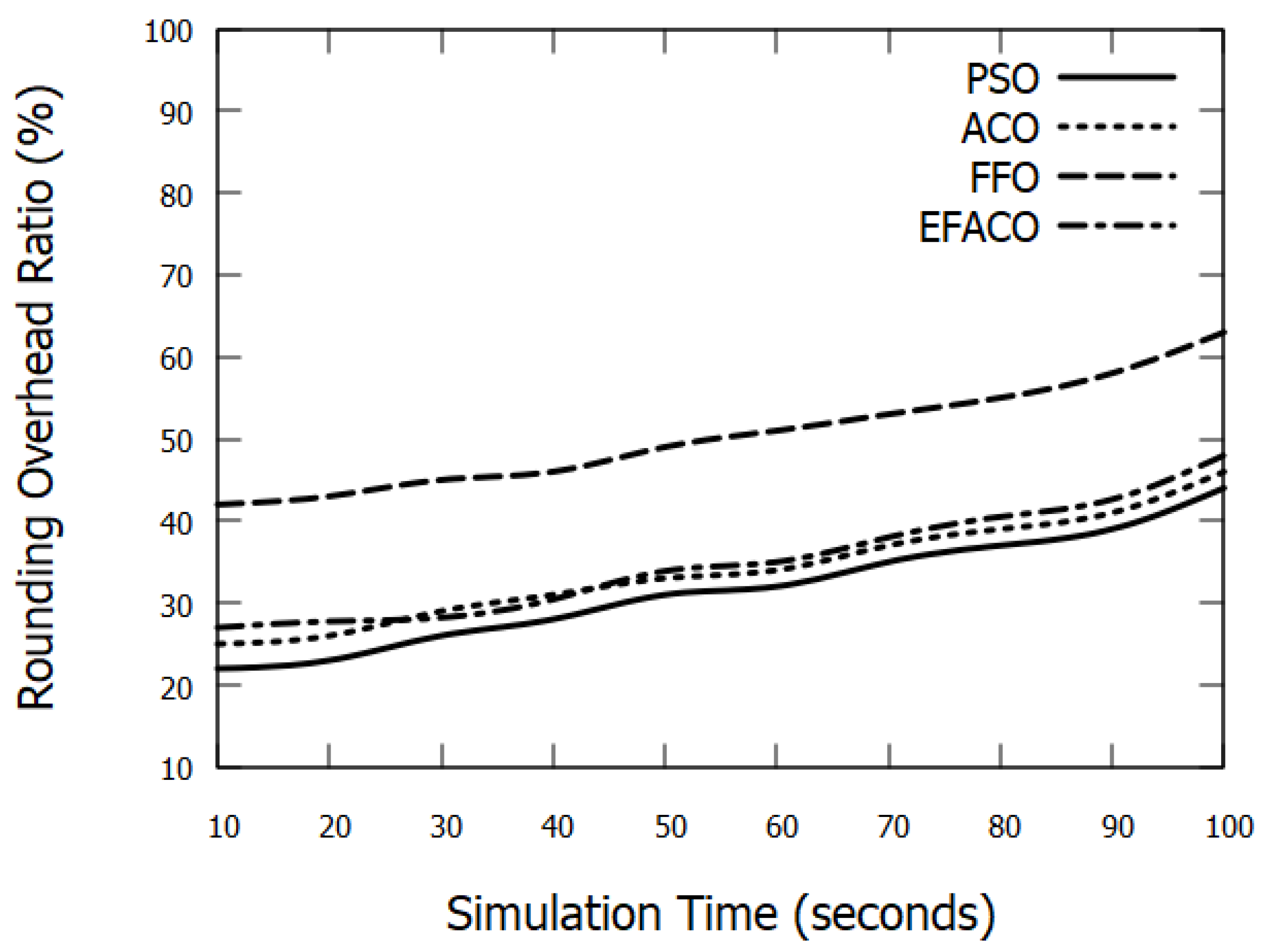
5.2.2. Rounding Overhead
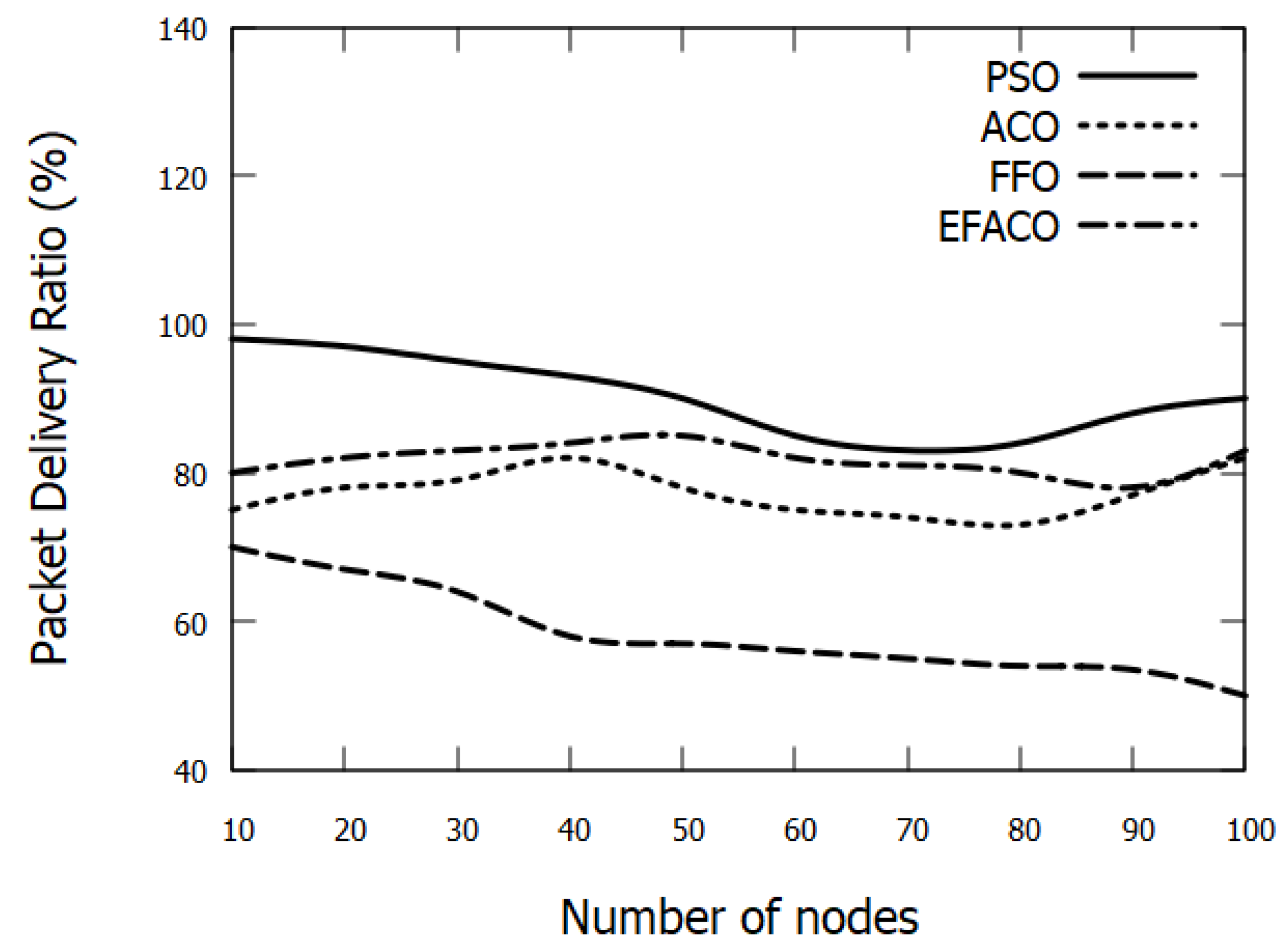
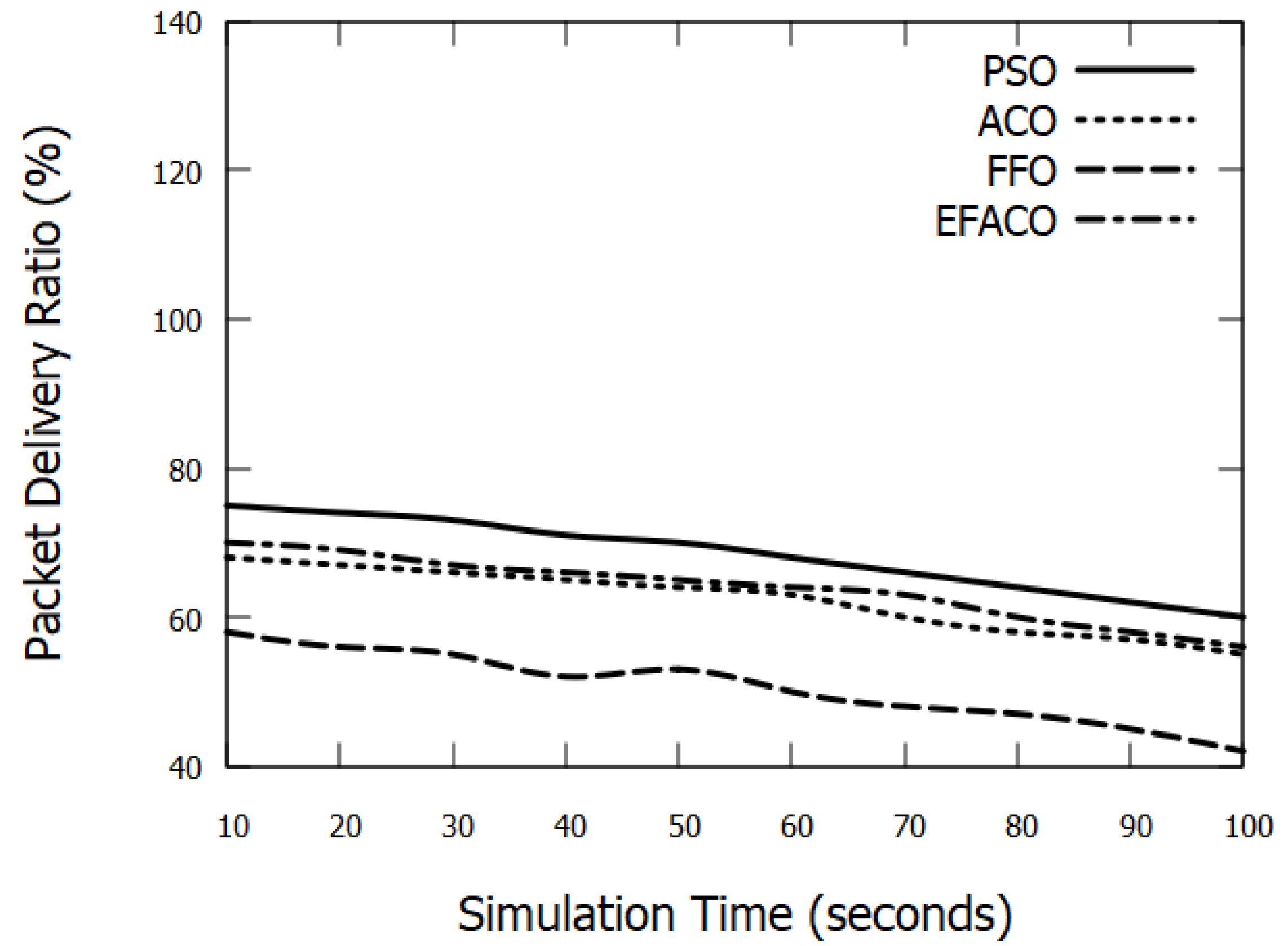
5.2.3. Packet Delivery Ratio
5.2.4. End to End Delay
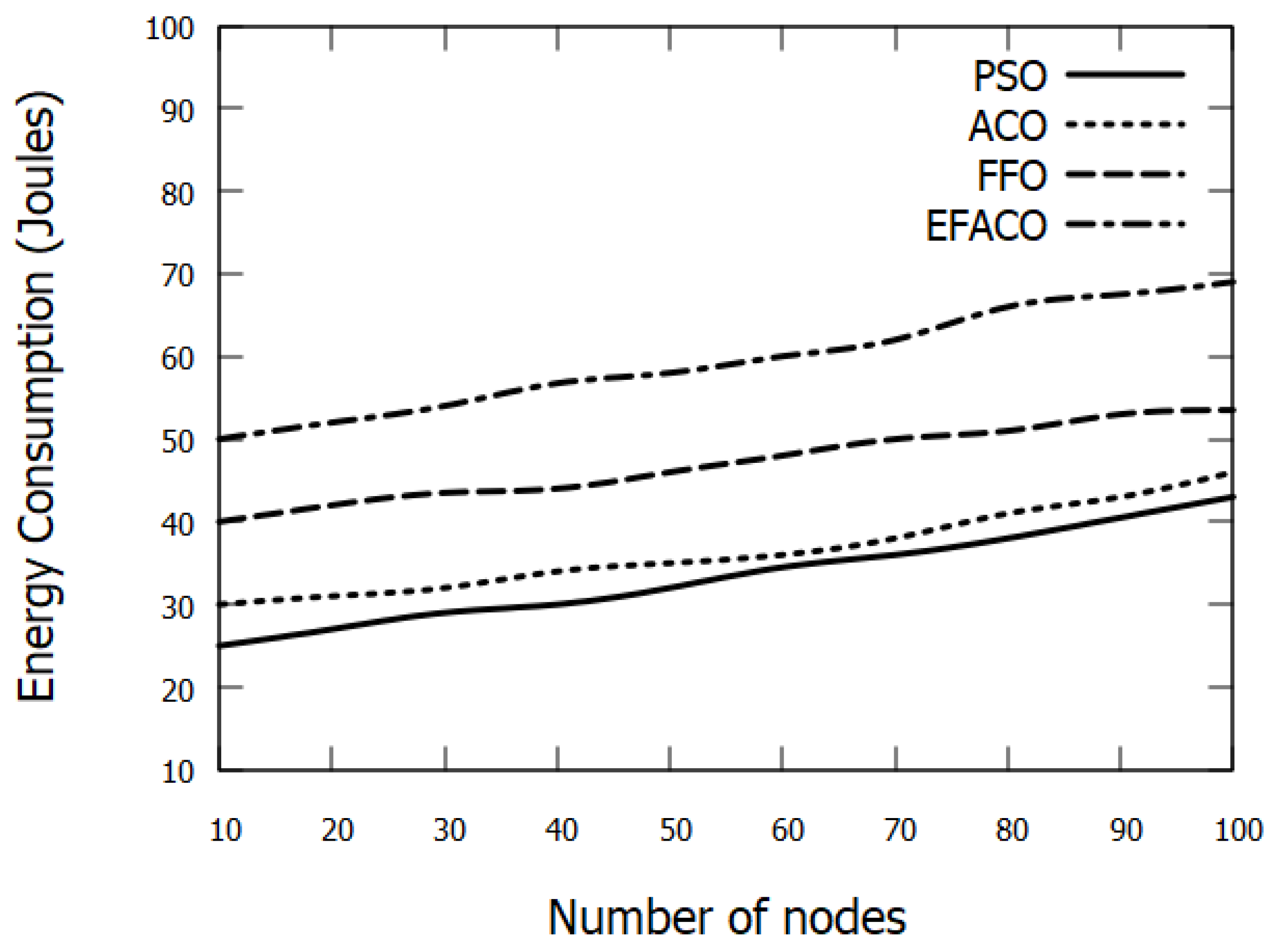
5.2.5. Energy Consumption
5.2.6. Gain/Savings
6. Experimental Results
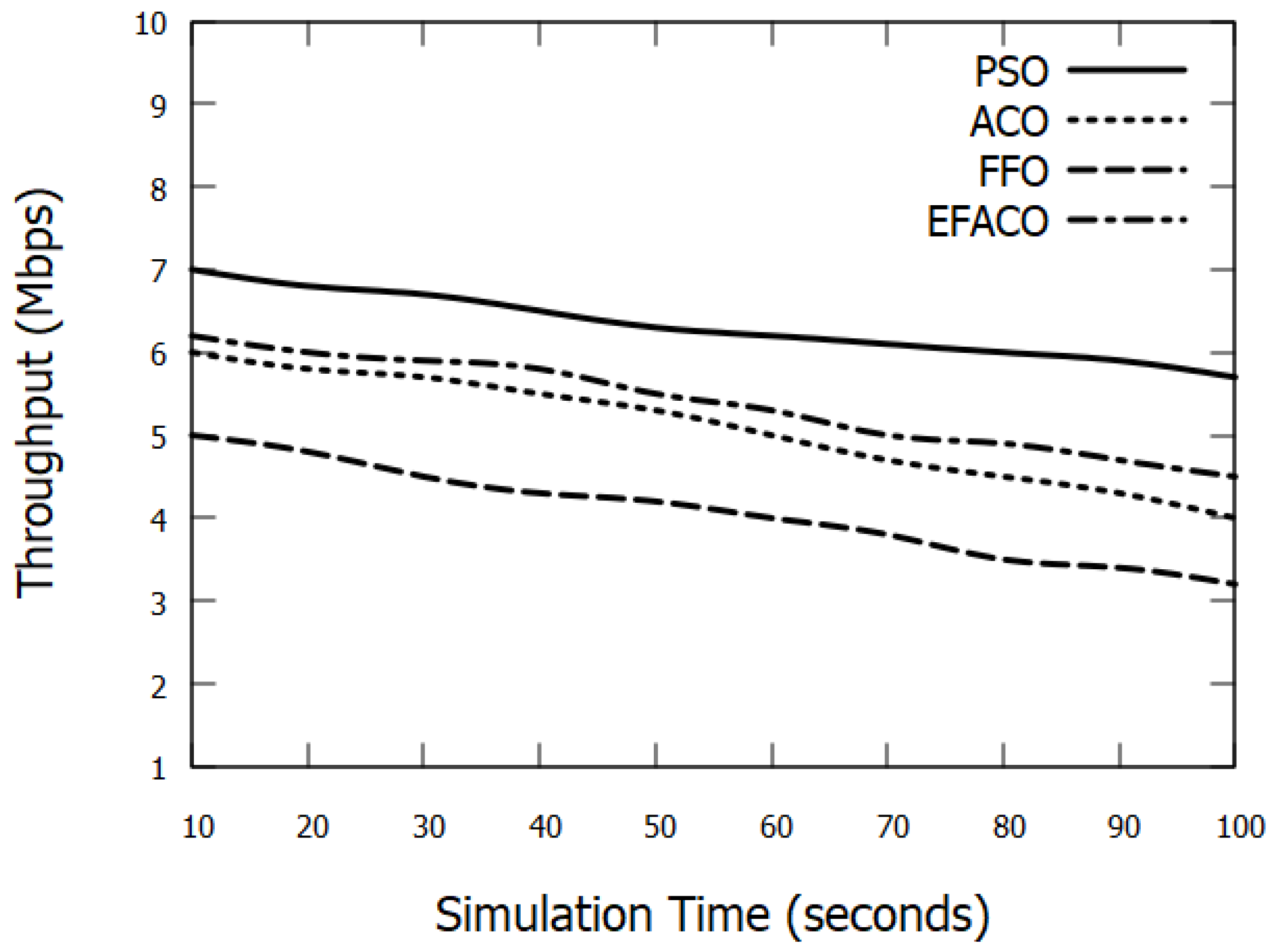
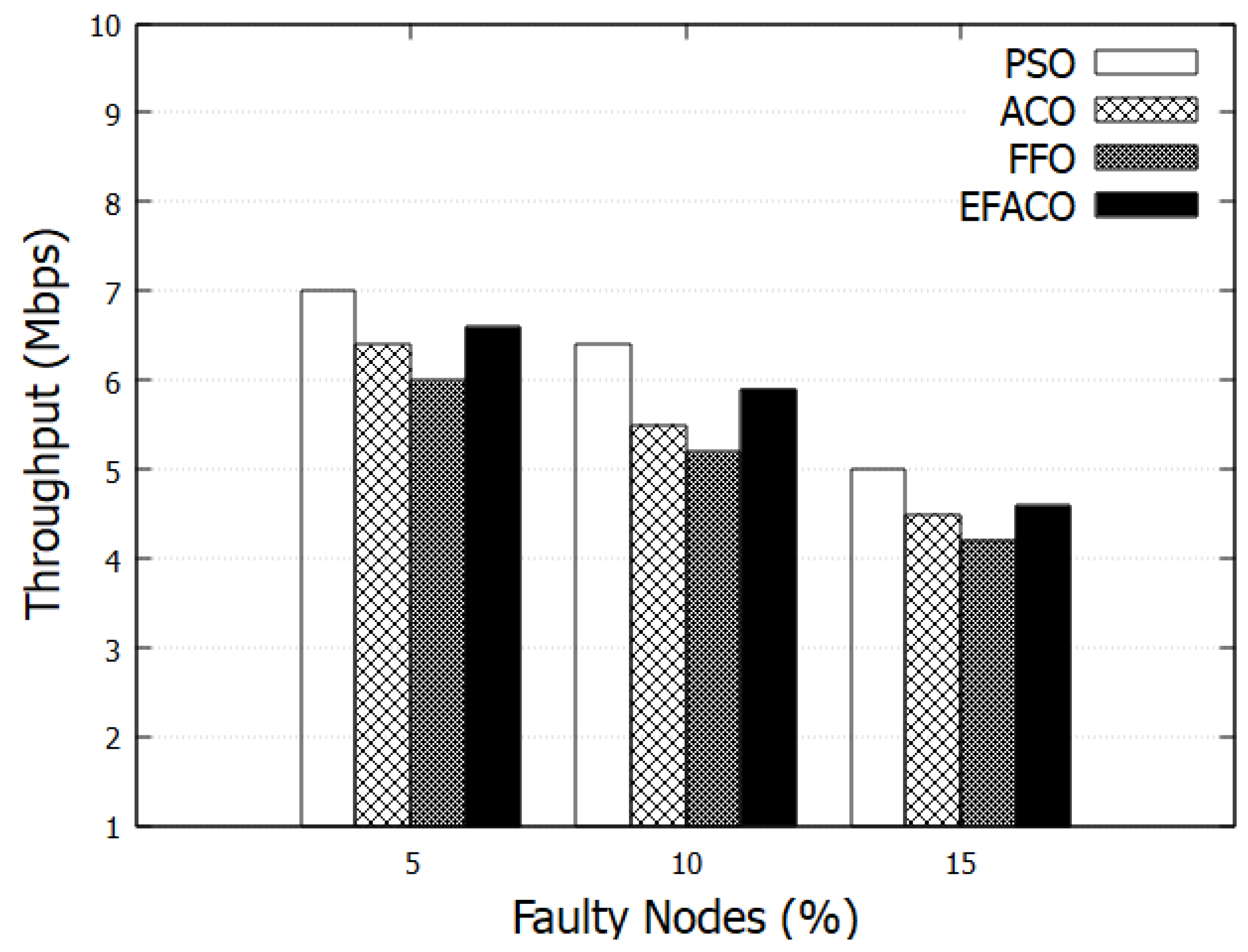
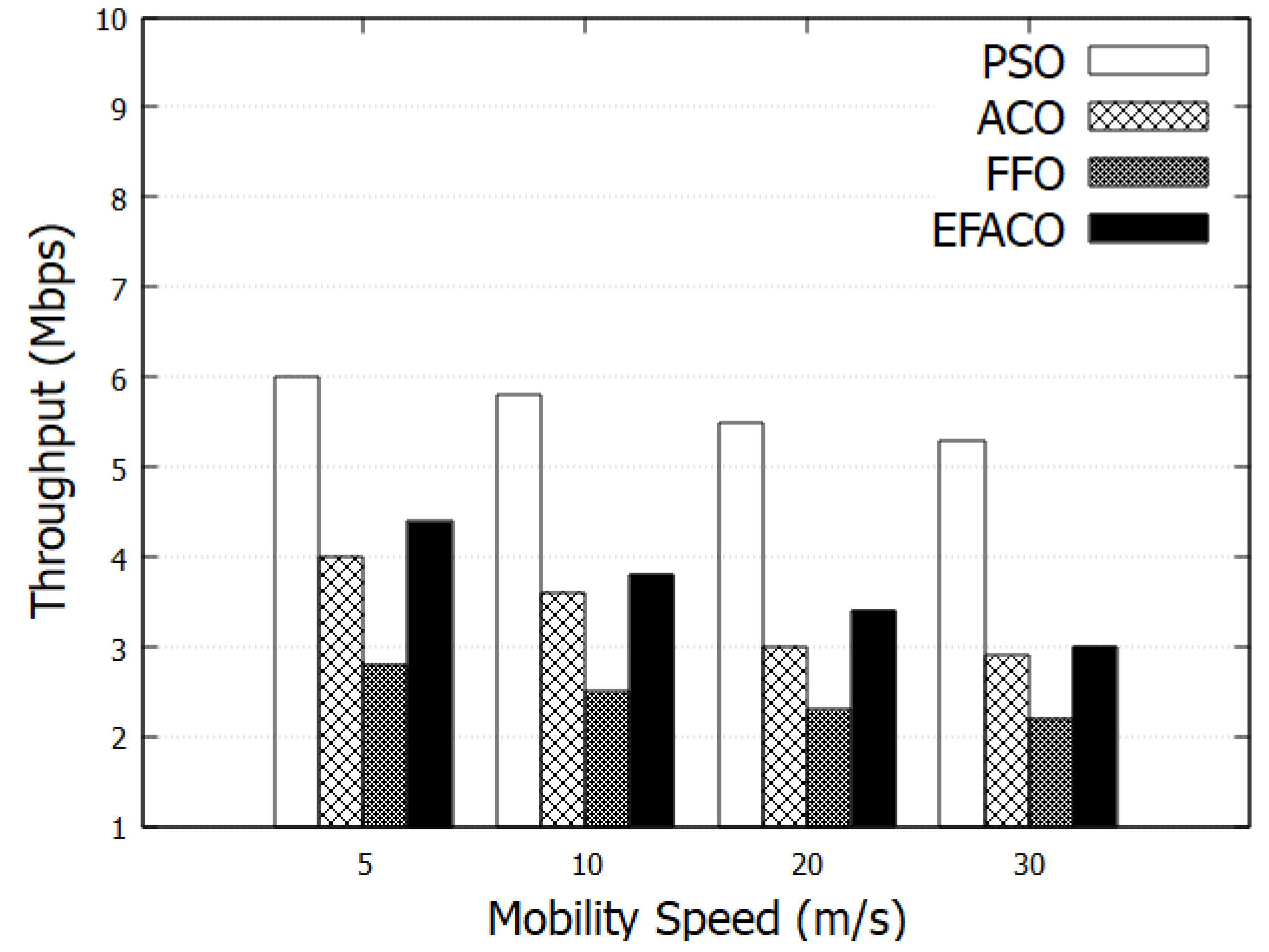
6.1. Throughput
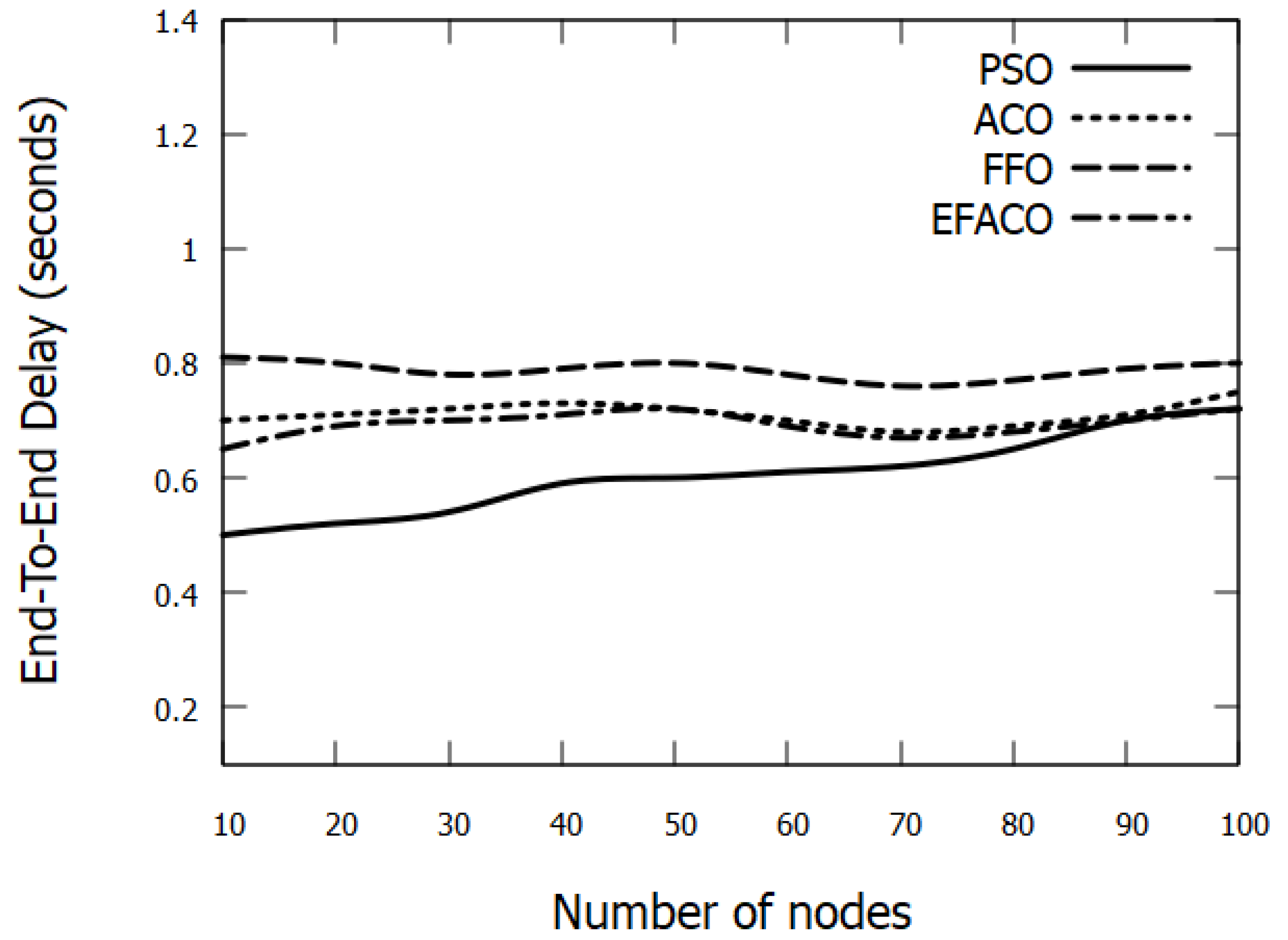
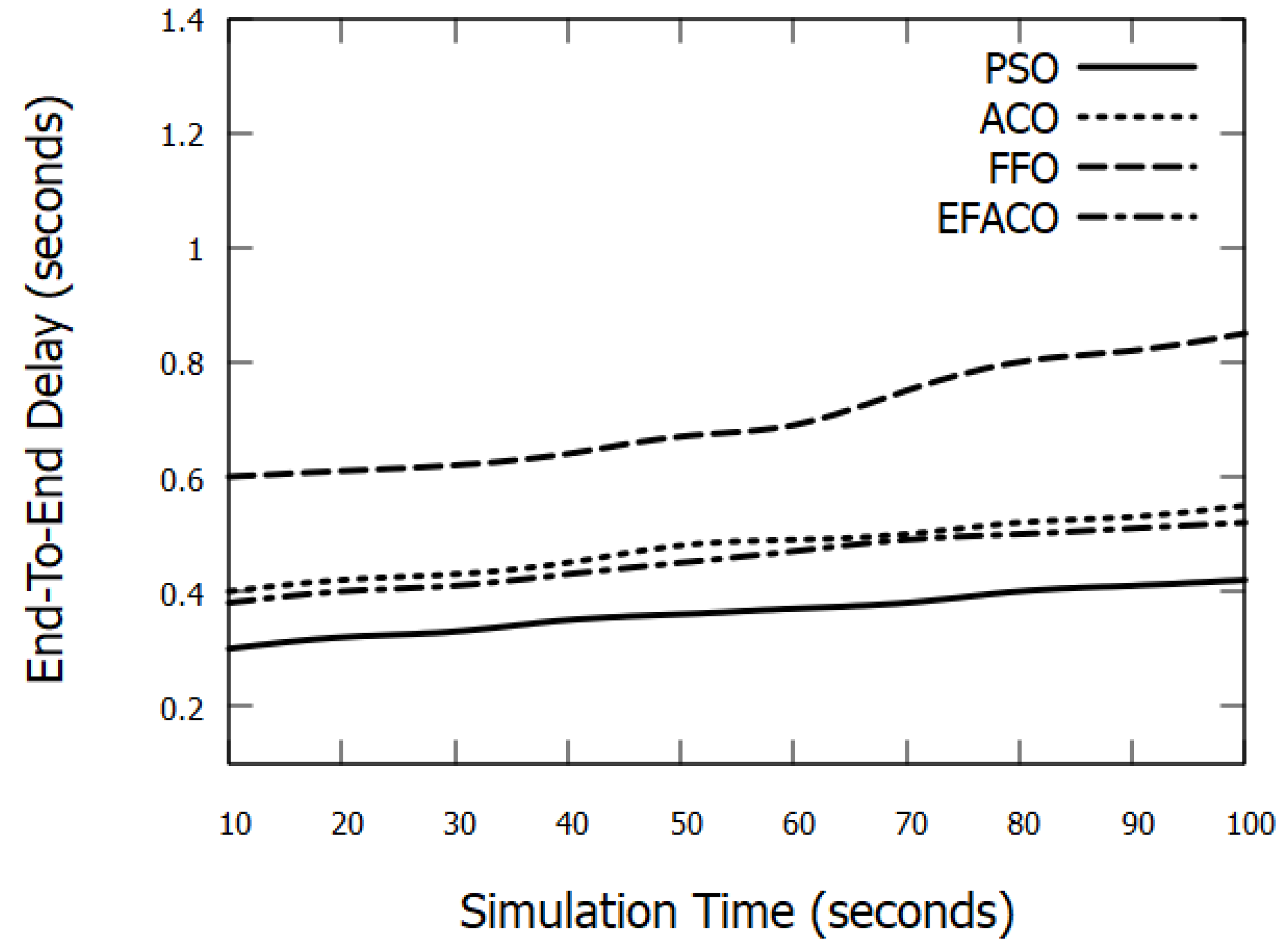
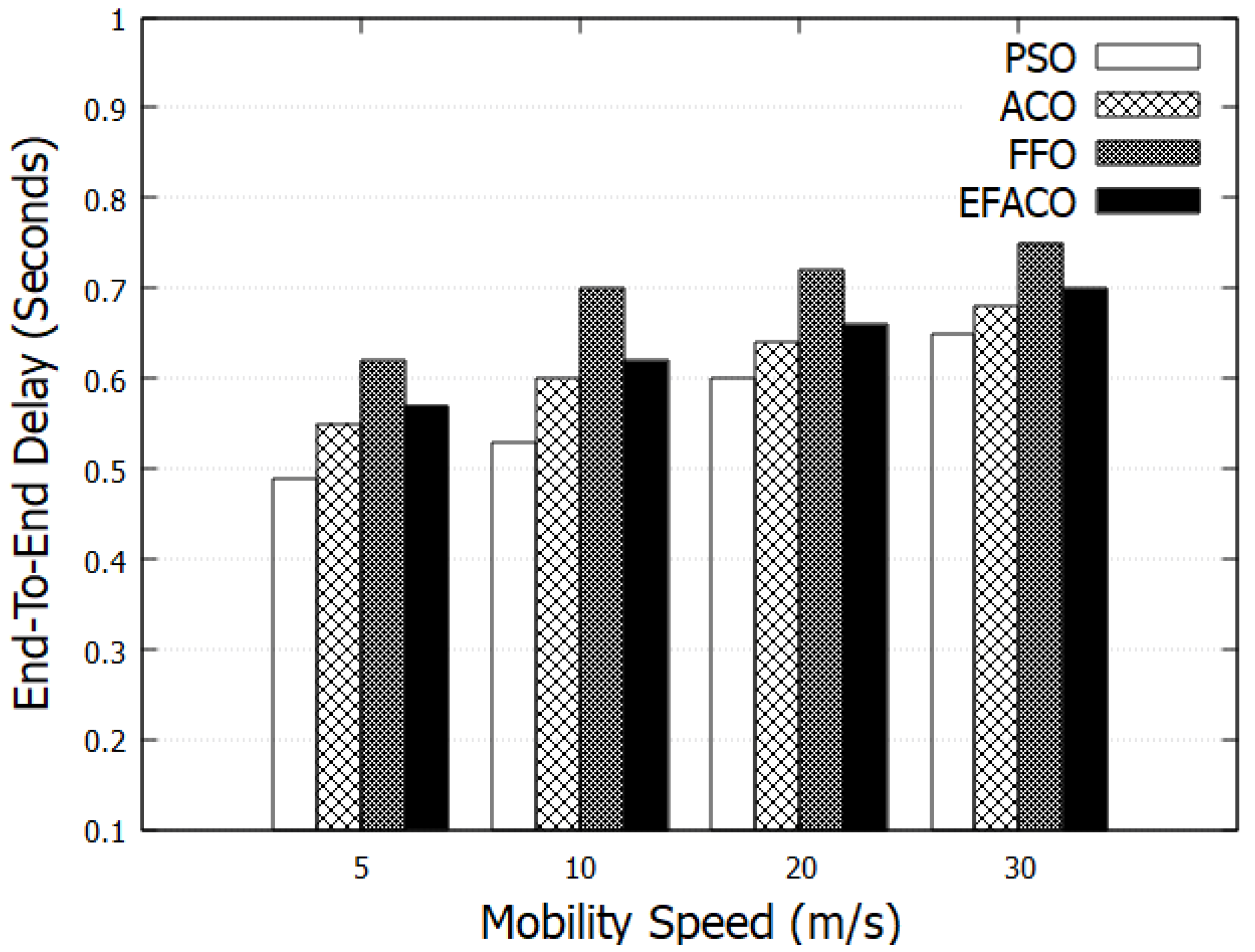
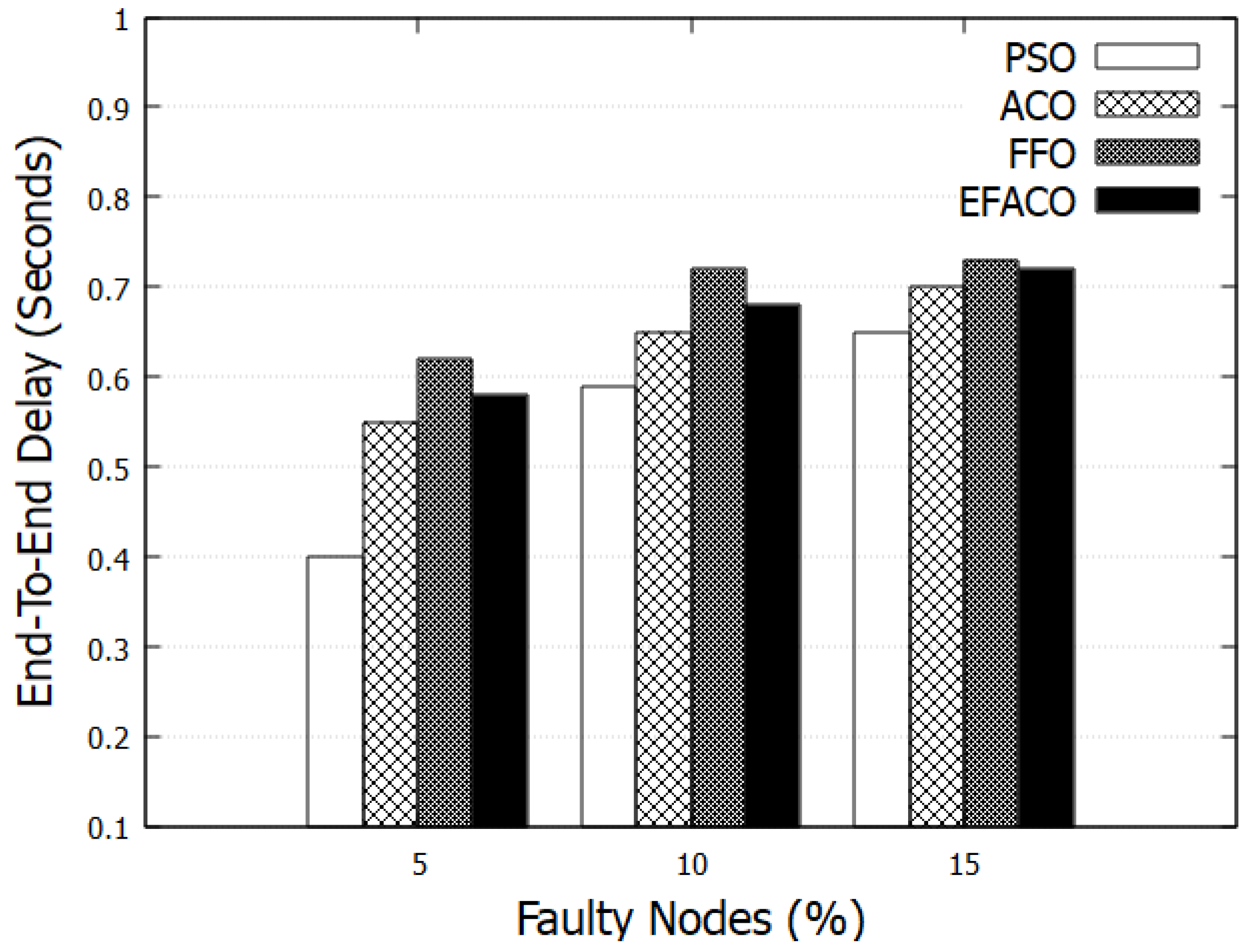
6.2. End to End Delay
6.3. Packet Delivery Ratio
6.4. Rounding Overhead
6.5. Energy Consumption
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sharan, B.; Chhabra, M.; Sagar, A.K. State-of-the-art: Data Dissemination Techniques in Vehicular Ad-hoc Networks. In Proceedings of the 2022 9th International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 11–13 March 2022; pp. 126–131. [Google Scholar]
- Mohammed, S.J.; Hasson, S.T. Modeling and Simulation of Data Dissemination in VANET Based on a Clustering Approach. In Proceedings of the 2022 International Conference on Computer Science and Software Engineering (CSASE), Guilin, China, 15–17 March 2022; pp. 54–59. [Google Scholar]
- Celes, C.; Boukerche, A.; Loureiro, A.A.F. On the Design of Bus-Based Vehicular Networks: Mobility Generation and Data Dissemination. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1512–1517. [Google Scholar]
- Hajjej, A.; Najjar, L.; Ayaida, M.; Messai, N.; Najeh, S. Improved Contention Based Forwarding for data broadcasting in VANETs. In Proceedings of the 2022 International Wireless Communications and Mobile Computing (IWCMC), Dubrovnik, Croatia, 30 May–3 June 2022; pp. 829–834. [Google Scholar]
- Ribeiro, B.; Nicolau, M.J.; Santos, A. Leveraging Vehicular Communications in Automatic VRUs Accidents Detection. In Proceedings of the 2022 Thirteenth International Conference on Ubiquitous and Future Networks (ICUFN), Barcelona, Spain, 5–8 July 2022; pp. 326–331. [Google Scholar]
- RadhaKrishna Karne, D.T. Review on vanet architecture and applications. Turk. J. Comput. Math. Educ. 2021, 12, 1745–1749. [Google Scholar]
- Noussaiba, M.; Rahal, R. State of the art: VANETs applications and their RFID-based systems. In Proceedings of the 2017 4th International Conference on Control, Decision and Information Technologies (CoDIT), Barcelona, Spain, 5–7 April 2017; pp. 516–520. [Google Scholar]
- Salem, F. Connectivity-Based Dissemination Protocol for VANET. In Proceedings of the 2022 IEEE 2nd International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), Sabratha City, Libya, 23–25 May 2022; pp. 401–406. [Google Scholar]
- Hamdi, M.M.; Audah, L.; Rashid, S.A. Data Dissemination in VANETs Using Clustering and Probabilistic Forwarding Based on Adaptive Jumping Multi-Objective Firefly Optimization. IEEE Access 2022, 10, 14624–14642. [Google Scholar] [CrossRef]
- Hajlaoui, R.; Alaya, B.; Mchergui, A. Optimized VANET Routing Protocol Using Cuckoo Search Algorithm. In Proceedings of the 2022 International Wireless Communications and Mobile Computing (IWCMC), Dubrovnik, Croatia, 30 May–3 June 2022; pp. 824–828. [Google Scholar]
- Zhang, Q.; Liu, W.; Meng, X.; Yang, B.; Vasilakos, A.V. Vector coevolving particle swarm optimization algorithm. Inf. Sci. 2017, 394, 273–298. [Google Scholar] [CrossRef]
- Ghaemi, Y.; El-Ocla, H.; Yadav, N.R.; Madana, M.R.; Raju, D.K.; Dhanabal, V.; Sheshadri, V. Intelligent Transport System Using Time Delay-Based Multipath Routing Protocol for Vehicular Ad Hoc Networks. Sensors 2021, 21, 7706. [Google Scholar] [CrossRef]
- BrijilalRuban, C.; Paramasivan, B. Energy Efficient Enhanced OLSR Routing Protocol Using Particle Swarm Optimization with Certificate Revocation Scheme for VANET. Wirel. Pers. Commun. 2021, 121, 2589–2608. [Google Scholar] [CrossRef]
- Zhao, Q.; Li, C. Two-Stage Multi-Swarm Particle Swarm Optimizer for Unconstrained and Constrained Global Optimization. IEEE Access 2020, 8, 124905–124927. [Google Scholar] [CrossRef]
- Lv, J.; Shi, X. Particle Swarm Optimization Algorithm Based on Factor Selection Strategy. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; pp. 1606–1611. [Google Scholar] [CrossRef]
- Stacey, A.; Jancic, M.; Grundy, I. Particle swarm optimization with mutation. In Proceedings of the 2003 Congress on Evolutionary Computation, Canberra, ACT, Australia, 8–12 December 2003. [Google Scholar]
- Jiang, J.-J.; Wei, W.-X.; Shao, W.-L.; Liang, Y.-F.; Qu, Y.-Y. Research on Large-Scale Bi-Level Particle Swarm Optimization Algorithm. IEEE Access 2021, 9, 56364–56375. [Google Scholar] [CrossRef]
- Tseng, H.-Y.; Chu, P.-H.; Lu, H.-C.; Tsai, M.-J. Easy Particle Swarm Optimization for Nonlinear Constrained Optimization Problems. IEEE Access 2021, 9, 124757–124767. [Google Scholar] [CrossRef]
- Yelure, B.; Sonavane, S. Particle Swarm Optimization based Routing Method for Vehicular Ad-hoc Network. In Proceedings of the 2020 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 28–30 July 2020; pp. 1573–1578. [Google Scholar] [CrossRef]
- Keshari, N.; Gupta, T.S.; Singh, D. Particle Swarm Optimization based Task Offloading in Vehicular Edge Computing. In Proceedings of the 2021 IEEE 18th India Council International Conference (INDICON), Guwahati, India, 19–21 December 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Pozna, C.; Precup, R.E.; Horváth, E.; Petriu, E.M. Hybrid Particle Filter-Particle Swarm Optimization Algorithm and Application to Fuzzy Controlled Servo Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 4286–4297. [Google Scholar] [CrossRef]
- Mahmood, T. Data Dissemination Scheme for VANET using Genetic algorithm and Particle Swarm Optimization. Int. J. Recent Technol. Eng. 2021, 10, 322–328. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, L.; He, Z.; Cao, J.; Wu, W. Efficient Hybrid Data Dissemination for Edge-Assisted Automated Driving. IEEE Internet Things J. 2020, 7, 148–159. [Google Scholar] [CrossRef]
- Chaqfeh, M.; El-Sayed, H.; Lakas, A. Efficient Data Dissemination for Urban Vehicular Environments. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1226–1236. [Google Scholar] [CrossRef]
- Zhang, R.; Lu, R.; Cheng, X.; Wang, N.; Yang, L. A UAV-Enabled Data Dissemination Protocol with Proactive Caching and File Sharing in V2X Networks. IEEE Trans. Commun. 2021, 69, 3930–3942. [Google Scholar] [CrossRef]
- Almasoud, A.M.; Kamal, A.E. Data Dissemination in IoT Using a Cognitive UAV. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 849–862. [Google Scholar] [CrossRef]
- Al-Omaisi, H.; Sundararajan, E.A.; Abdullah, N.F. Towards VANET-NDN: A Framework for an Efficient Data Dissemination Design Scheme. In Proceedings of the 2019 International Conference on Electrical Engineering and Informatics (ICEEI), Bandung, Indonesia, 9–10 July 2019; pp. 412–417. [Google Scholar] [CrossRef]
- Chowdhury, D.R.; Jain, V.K.; Maurya, S. Travel Angle Based Fast Data Dissemination to Relevant Vehicles in VANET. In Proceedings of the 2018 41st International Conference on Telecommunications and Signal Processing (TSP), Athens, Greece, 4–6 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Tei, A.I.; Doukha, Z.; Zafoune, Y. Multi-criteria-based relay election for Data Dissemination in urban VANET. In Proceedings of the 2019 International Conference on Theoretical and Applicative Aspects of Computer Science (ICTAACS), Skikda, Algeria, 15–16 December 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Hu, C.-C. Peer-to-Peer Data Dissemination for Deadline-Sensitive Streaming in VANETs. IEEE Access 2020, 8, 136348–136360. [Google Scholar] [CrossRef]
- Vasudev, H.; Das, D.; Vasilakos, A.V. Secure message propagation protocols for IoVs communication components. Comput. Electr. Eng. 2020, 82, 106555. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar] [CrossRef]
- Husain, A.; Singh, S.P.; Sharma, S.C. PSO Optimized Geocast Routing in VANET. Wirel. Pers. Commun. 2020, 115, 2269–2288. [Google Scholar] [CrossRef]
- Zhao, C.; Tang, Y.; Sun, Q.; Vasilakos, A.V. Deep Direct Visual Odometry. IEEE Trans. Intell. Transp. Syst. 2019, 23, 7733–7742. [Google Scholar] [CrossRef]
- Dya, T.; Blaise, B.B.; Betchewe, G.; Alidou, M. Implementation of Particle Swarm Optimization Algorithm in Matlab Code for Hyperelastic Characterization. World J. Mech. 2021, 11, 146–163. [Google Scholar] [CrossRef]
- Rathod, S.; Saha, A.; Sinha, K. Particle Swarm Optimization and its applications in agricultural research. Food Sci. Rep. 2020, 1, 37–41. [Google Scholar]
- Gad, A.G. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Tripathi, K.N.; Yadav, A.M.; Sharma, S.C. DDOS: Data dissemination with optimized and secured path using modified particle swarm optimization in vehicular communication network (VCN). Int. J. Inf. Technol. 2022, 14, 1855–1868. [Google Scholar] [CrossRef]
- Bhardwaj, A.; El-Ocla, H. Multipath Routing Protocol Using Genetic Algorithm in Mobile Ad Hoc Networks. IEEE Access 2020, 8, 177534–177548. [Google Scholar] [CrossRef]
- Elhoseny, M.; Shankar, K. Energy Efficient Optimal Routing for Communication in VANETs via Clustering Model. In Emerging Technologies for Connected Internet of Vehicles and Intelligent Transportation System Networks; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Patel, J.; El-Ocla, H. Energy Efficient Routing Protocol in Sensor Networks Using Genetic Algorithm. Sensors 2021, 21, 7060. [Google Scholar] [CrossRef]
- Yang, X.S. Firefly Algorithms for Multimodal Optimization. In Stochastic Algorithms: Foundations and Applications, SAGA 2009; Watanabe, O., Zeugmann, T., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5792. [Google Scholar]
- Blum, C. Ant colony optimization: Introduction and recent trends. Phys. Life Rev. 2005, 2, 353–373. [Google Scholar] [CrossRef]
- Dahan, F.; El Hindi, K.; Ghoneim, A.; Alsalman, H. An Enhanced Ant Colony Optimization Based Algorithm to Solve QoS-Aware Web Service Composition. IEEE Access 2021, 9, 34098–34111. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Parameter Value |
|---|---|
| Environment | ns3 |
| Operating System | Ubuntu 14.04 |
| Optimization | Particle Swarm Optimization |
| Road Type | Highway |
| Parameters | Throughput, End-to-End Delay, Packet Delivery Ratio, Rounding Overhead, Energy Consumption |
| Mobility Model | Random Way Point Model |
| Number of vehicles | 100 |
| Mobility Speed | 10 m/s |
| Simulation Time | 100 s |
| Wireless protocol | IEEE 802.11p |
| Number of faulty nodes | 0% |
| Packet loss ratio | 0% |
| Initial Energy | 100J |
| Traffic type | Constant Bit Rate (CBR) |
| Comparison Protocols | Firefly Optimization, Ant Colony Optimization, Enhanced Flying Ant Colony Optimization |
| No. of Nodes | PSO | ACO | FFO | EFACO |
|---|---|---|---|---|
| 5 | 6 | 4 | 2.8 | 4.4 |
| 10 | 5.8 | 3.6 | 2.5 | 3.8 |
| 20 | 5.5 | 3 | 2.3 | 3.4 |
| 30 | 5.3 | 2.9 | 2.2 | 3 |
| Sum | 22.6 | 13.5 | 9.8 | 14.6 |
| Gain % | 67.4 | 130.61 | 54.97 |
| No. of Nodes | PSO | ACO | FFO | EFACO |
|---|---|---|---|---|
| 10 | 0.5 | 0.7 | 0.81 | 0.65 |
| 20 | 0.52 | 0.71 | 0.8 | 0.69 |
| 30 | 0.54 | 0.72 | 0.78 | 0.7 |
| 40 | 0.59 | 0.73 | 0.79 | 0.71 |
| 50 | 0.6 | 0.72 | 0.8 | 0.72 |
| 60 | 0.61 | 0.7 | 0.78 | 0.69 |
| 70 | 0.62 | 0.68 | 0.76 | 0.67 |
| 80 | 0.65 | 0.69 | 0.77 | 0.68 |
| 90 | 0.7 | 0.71 | 0.79 | 0.7 |
| 100 | 0.72 | 0.75 | 0.8 | 0.72 |
| Sum | 6.05 | 7.11 | 7.88 | 6.93 |
| Saving % | 15.03 | 23.22 | 12.69 |
| No. of Nodes | PSO | ACO | FFO | EFACO |
|---|---|---|---|---|
| 10 | 98 | 75 | 70 | 80 |
| 20 | 97 | 78 | 67 | 82 |
| 30 | 95 | 79 | 64 | 83 |
| 40 | 93 | 82 | 58 | 84 |
| 50 | 90 | 78 | 57 | 85 |
| 60 | 85 | 75 | 56 | 82 |
| 70 | 83 | 74 | 55 | 81 |
| 80 | 84 | 73 | 54 | 80 |
| 90 | 88 | 77 | 53.5 | 78 |
| 100 | 90 | 82 | 50 | 83 |
| Sum | 903 | 773 | 584.5 | 818 |
| Gain % | 16.81 | 54.49 | 10.39 |
| No. of Nodes | PSO | ACO | FFO | EFACO |
|---|---|---|---|---|
| 10 | 25 | 30 | 40 | 50 |
| 20 | 27 | 31 | 42 | 52 |
| 30 | 29 | 32 | 43.5 | 54 |
| 40 | 30 | 34 | 44 | 56.75 |
| 50 | 32 | 35 | 46 | 58 |
| 60 | 34.5 | 36 | 48 | 60 |
| 70 | 36 | 38 | 50 | 62 |
| 80 | 38 | 41 | 51 | 66 |
| 90 | 40.5 | 43 | 53 | 67.5 |
| 100 | 43 | 46 | 53.5 | 69 |
| Sum | 335 | 366 | 471 | 595.25 |
| Saving % | 8.46 | 28.87 | 43.72 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Desai, D.; El-Ocla, H.; Purohit, S. Data Dissemination in VANETs Using Particle Swarm Optimization. Sensors 2023, 23, 2124. https://doi.org/10.3390/s23042124
Desai D, El-Ocla H, Purohit S. Data Dissemination in VANETs Using Particle Swarm Optimization. Sensors. 2023; 23(4):2124. https://doi.org/10.3390/s23042124
Chicago/Turabian StyleDesai, Dhwani, Hosam El-Ocla, and Surbhi Purohit. 2023. "Data Dissemination in VANETs Using Particle Swarm Optimization" Sensors 23, no. 4: 2124. https://doi.org/10.3390/s23042124
APA StyleDesai, D., El-Ocla, H., & Purohit, S. (2023). Data Dissemination in VANETs Using Particle Swarm Optimization. Sensors, 23(4), 2124. https://doi.org/10.3390/s23042124