2. Related Work
Over time, many algorithms to attain energy-efficiency and location accuracy in WSNs have been recommended in the relevant literature. These solutions are divided into range-based and range-free localization approaches [
8,
9]. For location estimation, the previous approaches employed range or angle measures such as angle of arrival (AOA) [
4], time difference of arrival (TDOA) [
5], and received signal strength indicator (RSSI) [
6]. In contrast, the latter methods used a different localization methodology. In terms of power consumption, hardware cost, and complexity, it has been found that range-free approaches are better than range-based techniques [
10]. This part will review some localization techniques based on DV-Hop and its variants.
DV-Hop is a traditional localization method that has gained popularity among academics due to its ease of use, stability, affordability, and minimal hardware requirements. Unknown nodes acquire anchor node information in this algorithm within a defined number of hops and calculate distances between themselves and anchors using DV-Hop [
7], as the DV-Hop technique uses the connection information to calculate the shortest paths. Unknown nodes employ the AHD to determine approximated distances to anchors. The three phases of the DV-Hop algorithm are described in the following lines.
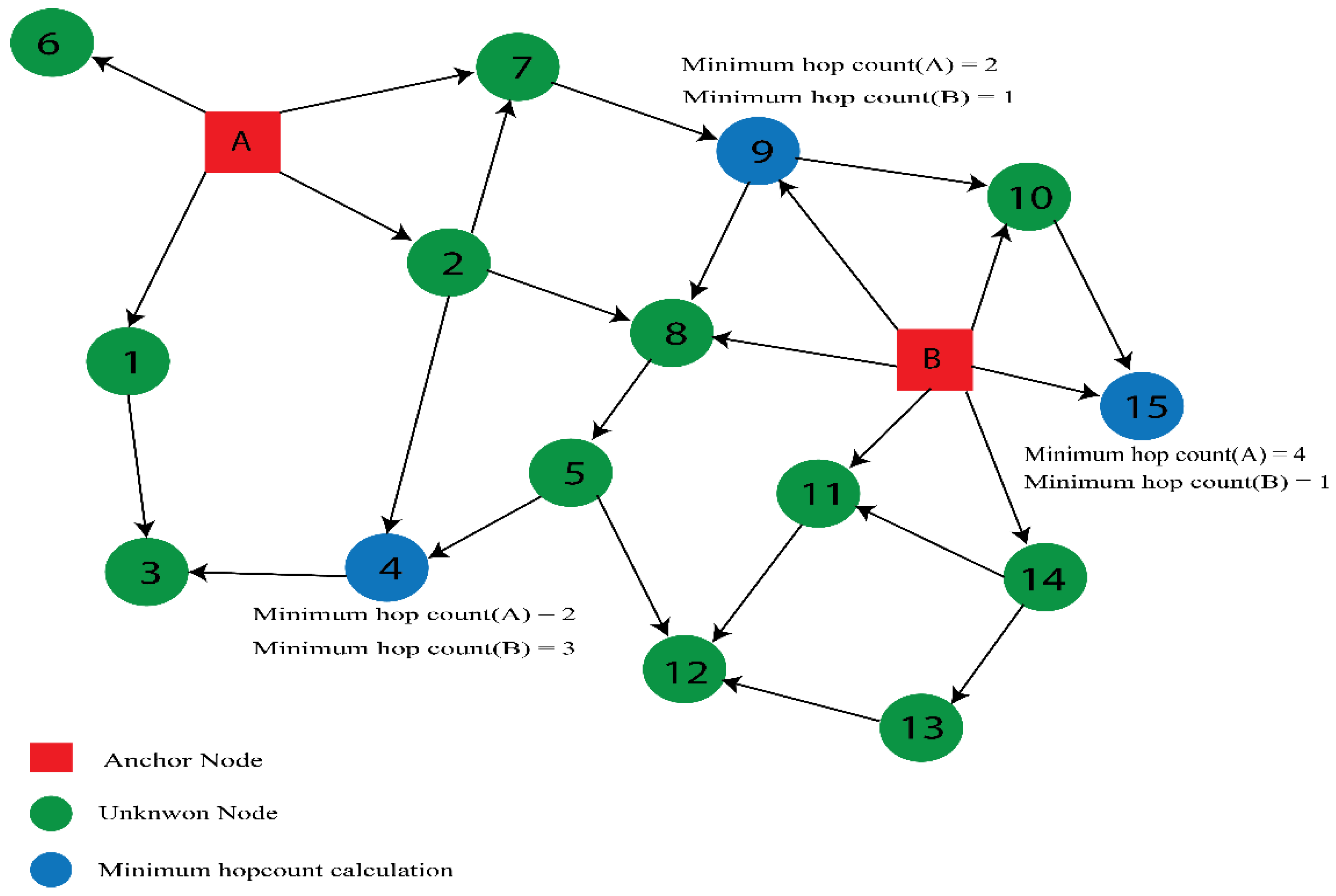
All anchors broadcast control packets containing their coordinates, i.e., (Xi, Yi). These coordinates are sent to their neighbors in this stage, and hop values are set to zero. The control packet has the following format: (Xi, Yi, hop value). A neighbor node receives a packet from a specific anchor with a lower hop count, the anchor node’s coordinates are preserved, and its hop value is updated by “1” before forwarding the packet to additional neighbor nodes; otherwise, the message is rejected, as shown in
Figure 2. Consequently, each unlocalized node receives the lowest hop count for each anchor.
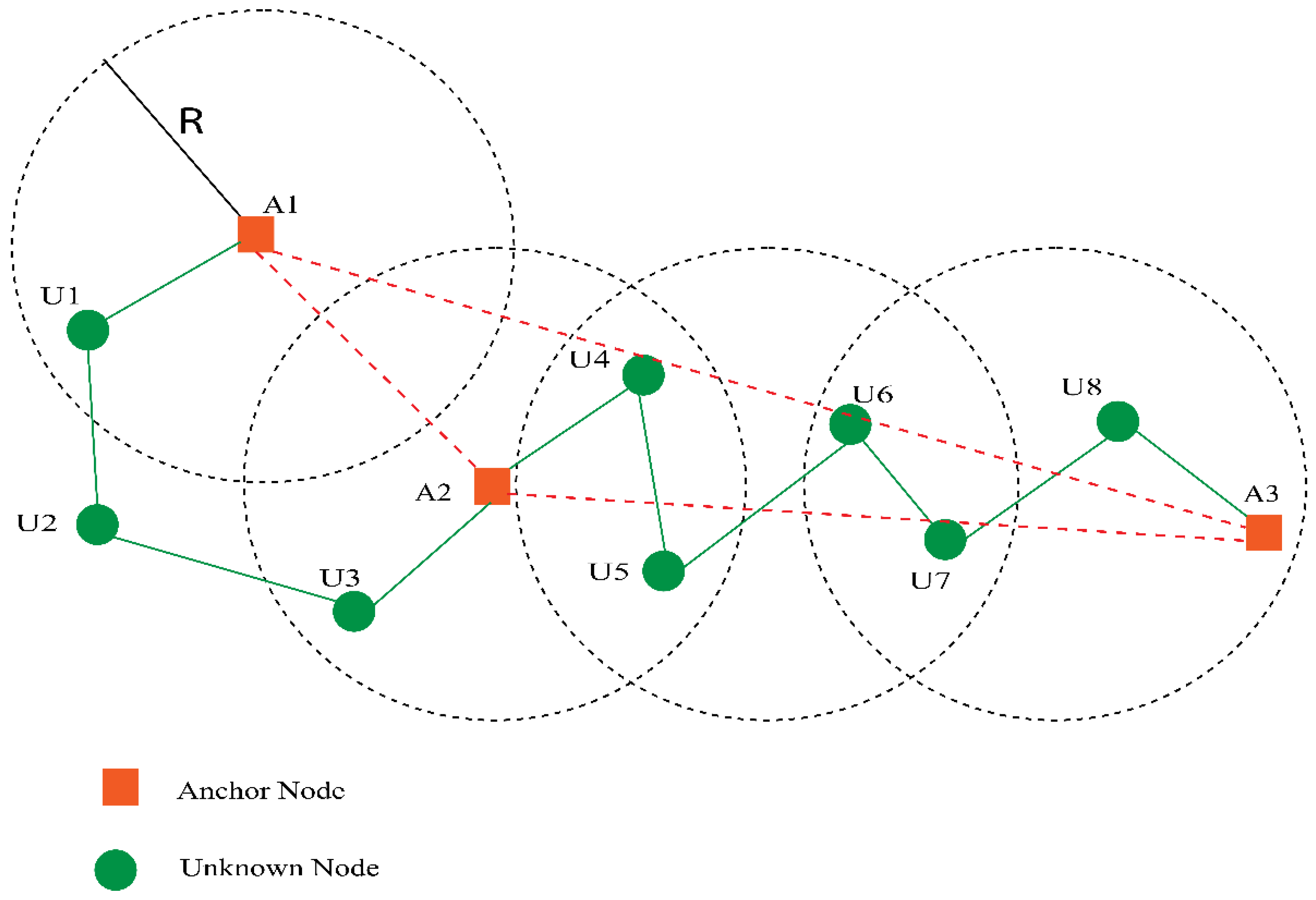
In this phase, the anchors receive the minimum hop count computed in the first phase. Then, using the Euclidean formula, the anchor can calculate its distance from different anchors and divide it by the minimum hop count. Anchors determine the AHD of each anchor node in this step, as depicted in
Figure 3. The AHD for the anchor node is computed using Equation (1):
where
and the coordinates of anchor nodes
i and
j are provided by
and
respectively, whereas the minimum hop value is represented by
. After computing HopSize
i, each anchor node uses controlled flooding to broadcast its HopSize
i throughout the system. The approximate distance between the anchor “
i” and the unlocalized node “
u” is computed using Equation (2):
where
is the shortest distance between “
i” and “
u”.
In this stage, the coordinates of all unlocalized nodes are established. The multi-literation technique [
9] approximates the unlocalized node’s position.
It is presumed that are the coordinates of an unlocalized node and (xi, yi) are the known coordinates of anchor “i”. Let “dm” be the distance between the unlocalized and the anchor, where m represents the total anchors.
Equation (3) has the following form:
The matrix representation of Equation (4) from Equation (3) is as follows:
The unknown node
X possessing coordinates
can obtain its calculated coordinates using least-squares methods as follows:
This scheme will consume more energy due to flooding and position errors due to AHD and will be employed only for isotropic networks. This algorithm still needs improvement with consideration of essential factors such as increasing energy efficiency, improving location accuracy, and reducing communication overhead. The distribution of sensor nodes affects the DV-Hop algorithm’s accuracy; specifically, if the distances between nodes are approximately equal, the average hop size anticipated will be correct, leading to a low localization error. However, the algorithm’s accuracy suffers if the distribution of nodes is unequal [
11]. To overcome the drawbacks of the DV-Hop algorithm, a novel method based on the DV-Hop localization technique was proposed by Fang et al. [
12]. The RSSI technology is introduced when classifying the current methods based on whether the placement node is one hop away from anchor nodes. Utilizing signal attenuation during signal transit, RSSI calculates the distance. If the sending node’s transmitting signal strength and the receiving node’s received signal strength are known, the signal loss during transmission can be calculated and the formula may then be used to convert the transmission loss to distance. This capability is mostly used in this article so that RSSI technology may find the single hop between two nodes. The other purpose of this technology and the existence of constraints, therefore, had no impact and may be disregarded. Low cost and low power requirements are met via the improved DV-Hop Algorithm. However, external influences can readily impact a signal and affect the ability to ensure that anchor nodes are distributed uniformly and in a specific proportion.
Liu, J. et al. propose various average hop distance (VAH-DV-hop) methods [
13] which can reduce energy consumption and eliminate extra hardware. The fundamental ideas of this method are to utilize the angle approach to solve the problems faced by routing and to use varied AHD to improve distance estimation accuracy. According to simulation results, VAH-DV-Hop can boost location precision, especially in networks with uneven coverage. In the DV-Hop method, hop distance is used for straight-line hop distance. However, in a real network, the route between the anchor node and the unknown nodes is not straight. The authors of [
14] found that altering the distance between the anchor and unlocalized nodes improved the DV-Hop approach’s accuracy and reduced the localization errors it introduced.
IDVLA, a reliable DV-Hop variant suggested by Chen et al. [
15], assesses the average hop size rather than the initial hop size. The least-squares approach was replaced by the weighted least-squares method. Thus, each anchor helps to determine the location of the node. However, if we investigate only a few anchors close to a unlocalized node, there is a greater possibility that the node can be located with more precision. Zhang et al. provide a unique weighted centroid localization (WCL) based on DV-Hop that can only find unknown nodes that are strongly related to the anchor nodes, as illustrated in Equation (9) in [
16]:
where (
xi,
yi) are the known coordinates, (
xj,
yj) are the unknown coordinates, and n is the total nodes. WCL consumes more energy, like DV-Hop, and the weight calculation increases computational complexity, which, again, consumes more energy. Furthermore, G. Song et al. introduced the Refined DV-Hop localization technique in [
17], which uses a hyperbolic function rather than multiliteration to estimate the average of the average hop size of all nodes. X.Fang et al., in [
18], established a technique based on the compensation coefficient that may decrease error by correcting the distances between anchors and unlocalized nodes.
S. Tomic [
19] exploited three advanced DV-Hop variants (iDV-Hop1, iDV-Hop2, and Quad DV-Hop), in which the first two algorithms used the geometry method, which improved accuracy slightly. However, the other algorithm uses a quadratic programming solution instead of the least-squares method to solve non-linear equations. It significantly improves accuracy. As mentioned above, the first two phases in all algorithms are identical and require significant energy due to broadcasting. Energy use can be greatly reduced if this message transmission can be managed somehow. Furthermore, the authors in [
20] provide a method for comparing hop sizes to determine the best maximum hop count. The AHD from the source node is modified using this method using a single-hop average error function and a sub-error estimate function. Although employing all anchors reduces inaccuracy, the method requires significant online and offline computing. A non-linear weighted hyperbolic (WH) approach is implemented on each node to acquire its location in [
21] by J. Mass-Sanchez et al., which improved accuracy significantly while increasing complexity and processing time. According to the research in [
22], a threshold for distance or hop count should be used to improve computation and prevent energy loss from dying nodes.
Xin Qiao [
23] proposed a WSN localization technique, based on DV-Hop, which adjusts both the AHD and position computation. The technique utilizes the optimized anchor node information and has better placement precision compared to a single anchor node. The main algorithmic improvements in this technique are the initial value estimate and final estimation of node coordinates. The initial estimate uses the min-max approach when there are fewer anchor nodes, and the ML algorithm is used when there are more anchor nodes. The final estimation’s initial value is repeatedly optimized using the quasi-Newton method. The experiments showed that it provides an efficient and effective ranging-free locating solution for WSN. However, the main benefit of the min-max algorithm is its ability to produce good positioning results with minimal calculation; however, if there are many anchor nodes, its accuracy could suffer.
A technique for enhancing the precision of target localization and tracking in indoor industrial environments was suggested by Khan, M.A., et al. [
24]. The method involves selecting dependable nodes by considering the distance between nodes within a cluster and the destination to reduce placement errors. The technique was found to be more accurate in tracking targets than traditional trilateration. However, it is inappropriate for outdoor use or large-scale applications.
D. Xue [
25] suggested an improved DV-Hop algorithm based on hop thinning and distance adjustments to mitigate the significant error in DV-Hop. Using RSSI ranging technology, the weighted average of the estimated distance and hop distance errors are utilized to change the AHD and the minimum hop distance. The literature review demonstrated that most efforts have focused on enhancing localization accuracy, whereas energy reduction, a crucial aspect of WSN localization, has not been addressed. Although all the work mentioned above enhances localization precision, relatively few efforts have focused on minimizing energy consumption. Moreover, in [
26], the inverse distance weighting (IDW) correction approach produces a precise AHD. Different weights are assigned to anchors based on their distances.
A priority-based algorithm [
27] is another strategy that gives a few anchors precedence depending on their AHD. Using high-priority anchors, the weighted centroid approach is then used to locate unknown nodes. Results reveal that the methodology works better in anisotropic fields than the current weighted centroid methods. A second study direction examined the locations of uneven fields. A chaotic environment, network gaps, uneven fields, and irregular node radio propagation patterns are a few anomalies that make node localization challenging [
28].
An improved version of the DV-Hop algorithm for industrial WSNs, based on the multi-communication radius localization technique and utilizing the cosine theorem to optimize distance estimation for unidentified nodes and correct hop count estimations, was proposed in [
29]. The algorithm employs multiple communication radii for broadcasting positions and seeks to minimize the number of hops between unknown and beacon nodes. It then utilizes maximum likelihood estimation to identify the coordinates of the position of the unknown node after modifying hop distance estimations with the cosine theorem. The performance of this improved algorithm is compared to the traditional DV-Hop and DDV-Hop algorithms under varying densities of anchor nodes and communication radii. Results from experiments have shown that the improved DV-Hop algorithm leads to increased location accuracy and a reduction in average location error for unlocalized nodes when compared to the traditional algorithms.
DV-maxHop localization, based on anisotropic and isotropic networks, was proposed by Shehzad et al. [
30]. For better network location, the authors included a control parameter named MaxHop. If the hop count exceeds MaxHop, the information from the anchor nodes is ignored by the destination node. This prevents the use of data from different anchor nodes, which leads to distance estimate inaccuracies. The MaxHop technique improves convergence speed, localization precision, and energy usage in both isotropic and anisotropic networks. If anchor nodes are distributed unevenly, the technique either fails to locate all unknown nodes or its precision is significantly reduced. Improved DV-maxHop [
31] was proposed in the context of examining the DV-maxHop constraint. In this scheme, we adjust the average hop count of each link between the anchor and unlocalized nodes to rectify the distances using a correction approach. This change, based on the distribution of sensors in the network, enables the sensors to more accurately position themselves. Based on the simulation findings, it is clear that improved DV-maxHop significantly improves location error without adding any additional hardware or increasing communication costs.
Messous, S., et al. proposed a scheme [
32] for estimating the distance between unidentified nodes and anchors using the polynomial approximation and the RSSI. In addition, this approach employs a recursive calculation of the localization to increase location estimate precision. Experimental findings demonstrate that this method reduces localization error and enhances localization precision.
In addition to DV-Hop and its other latest algorithms, an energy-efficient strategy is presented by S. Kumar et al. in [
33], which suggests that anchors’ hop sizes are calculated and modified at the target node, generating an energy-efficient algorithm. This technique reduces considerable communication between the nodes. Goyat, R., et al. [
34] described a three-phase procedure for energy-efficient localization in WSNs. Discovering the one-hop neighbor nodes via beacon nodes by sending additional tone requests and reply packets via the MAC layer to minimize packet collisions is the initial stage. The second stage is to separate the detected one-hop unlocalized nodes into two groups: those with direct and those with indirect communication. This action is taken to increase energy efficiency. To reduce localization errors, a correction factor is then used, and the localized nodes are turned into assistance nodes. In addition, Kaur et al. [
35] suggested an approach to investigate how tight anchors affect the results of DV-Hop algorithms, which consume less energy. However, this often leads to overestimating the distance and decreased localization accuracy. Liu et al. [
36] reduced hops between unknown and anchor nodes to save energy. Accuracy is achieved by modifying positioned nodes and weighting one-hop distance. Simulations show the above strategy reduces localization rounds, positioning error, and energy consumption.
This section presents the enhanced version of the DV-Hop algorithm [
35], which consists of the three phases outlined below:
Step 1. The first step is similar to that of a traditional DV-Hop.
Step 2. All anchors calculate their AHD using Equation (1) and forward it to all other nodes. The unknown node locates the “t” anchors nearby, calculates their distance from those “t” anchors, and then multiplies the number of hops by the AHD using Equation (2).
Step 3. Using the least-squares method and only “t” nearby anchors, the coordinates of all nodes can be computed using the given Equations (10)–(13).
The unknown node
X with coordinates
can calculate its estimated coordinates using least-squares methods as follows:
From the literature review, it is evident that when we improve localization accuracy, energy consumption increases. On the other hand, location accuracy is compromised if we want to minimize energy consumption. While previous research has made some progress in improving localization accuracy in some studies [
7,
12,
16,
25,
30,
31,
32] and reducing energy consumption in others [
33,
35,
36], there is still room for further improvement. To the best of our knowledge, no studies have been focused on minimizing the trade-off between energy efficiency and localization accuracy. Thus, there is a dire need for a contemporary solution in WSN localization to obtain higher localization accuracy while focusing on minimized energy consumption. These techniques allow a certain degree of localization error reduction, but there is still room for improvement.
3. The Proposed Enhanced DV-Hop Algorithm
In this paper, we propose the Hop-correction and energy-efficient DV-Hop (HCEDV-Hop) algorithm, an enhanced version of DV-Hop, to enhance location accuracy and energy efficiency. The HCEDV-Hop algorithm aims to exclude anchor nodes that could cause significant errors in the AHD calculation by setting a range error factor. This improves the accuracy of AHD calculations and reduces the impact of random topology. Next, the anchor node broadcasts the corrected AHD to the t-hop threshold to prevent unknown nodes from receiving information from all anchor nodes. The algorithm then calculates the distances between the anchor and unlocalized nodes based on the corrected AHD for t hops. It approximates these distances using the least-squares method to enhance location accuracy as shown in Algorithm 1.
| Algorithm 1 HCEDV-Hop WSN Localization with Correction step |
| This study introduces an enhanced version of the DV-Hop algorithm named Hop-correction and energy-efficient DV-Hop (HCEDV-Hop). We demonstrate that this algorithm can accurately predict the locations of unlocalized nodes with low energy consumption by introducing a threshold and correcting the AHD. |
| Input: Total nodes n, Anchor nodes m, coordinates (Xi, Yi), communication range R, area 500 * 500 m2 |
| Output: Location estimate Xn of unknown nodes |
| Initialization: i = 1,2, 3, …, n |
| Packet = 0 |
| Selecting a set of anchors for the localization procedure |
| |
| |
| |
| Packet = Packet + 1 |
| |
| |
| |
| |
| |
| |
| |
| |
| |
| Packet = Packet + 1 |
| |
| Using RSSI by Equation (14). |
| |
| |
| |
| Calculate AHD using Equation (16) |
| Calculate the AHD error using Equation (17) |
| Calculate distance by adding error using Equation (18) |
| Position estimation Xn of the unknown node using Equation (10)–(13) for t-specific threshold |
| |
Estimate coordinates of unknown node n and energy consumption in terms of a packet exchanged
End |
In the DV-Hop localization technique, the distance between unlocalized and anchor nodes is calculated using an unbiased estimate, which can introduce errors in the AHD calculation, such as cumulative errors in the AHD and unknown node estimates. We propose an AHD removal step in the HCEDV-Hop algorithm to minimize these errors. This enhances the accuracy of the AHD and unknown node estimation calculations in the final step of the algorithm.
Flooding is a resource-intensive and energy-demanding process that generates significant communication overhead. In the first phase of the proposed algorithm, anchor nodes transmit information data packets which are then forwarded by neighbor nodes, increasing the hop value by one and saving the anchor node’s information. The information is then sent on to other nodes rather than back to the source. During the flooding communication stage, an unknown node may receive the same data from multiple anchor nodes through different routes. The unknown node saves the information data that have traveled the minimum number of hops, which minimizes resource and energy consumption.
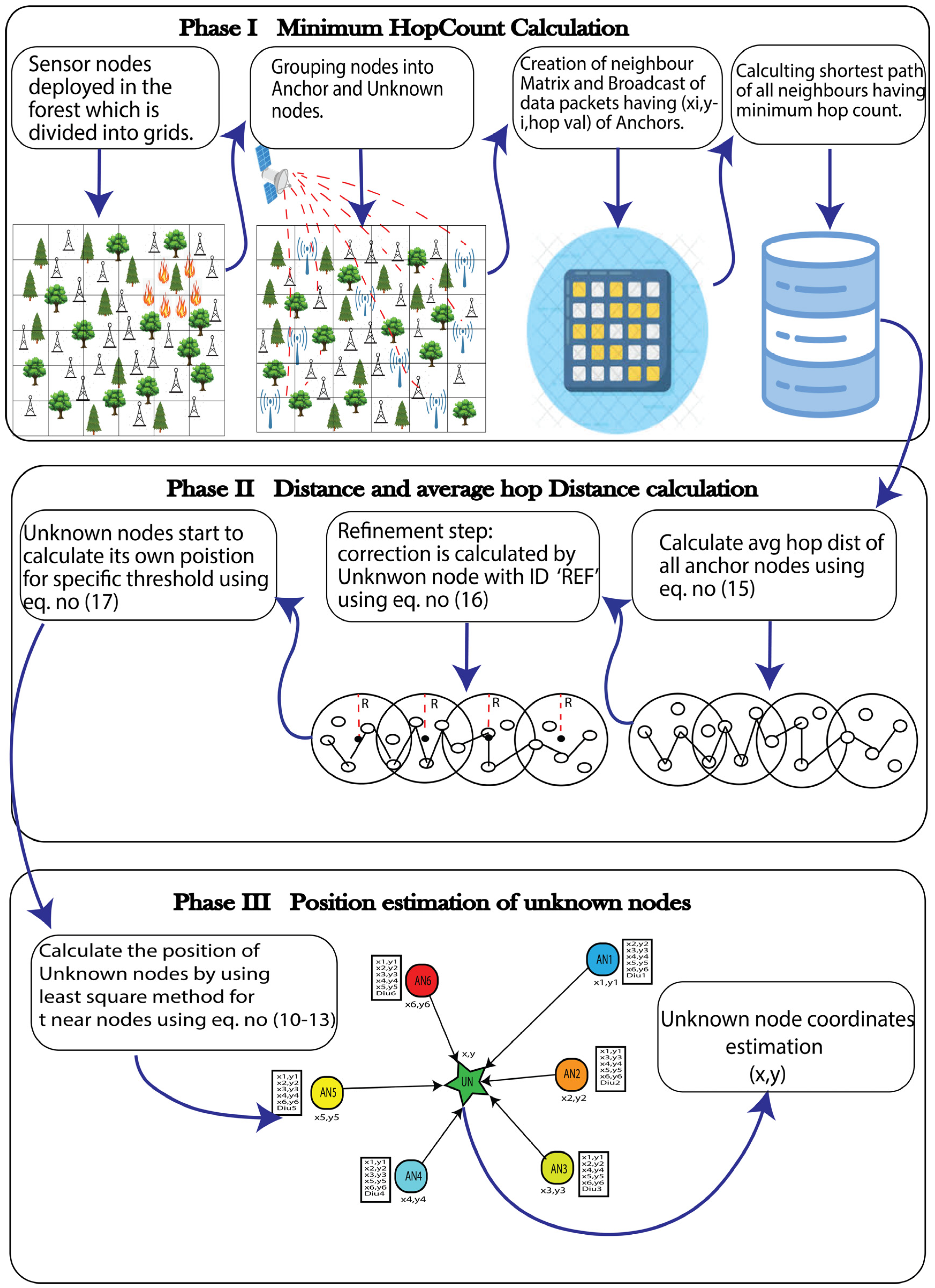
The overall architecture of the HCEDV-Hop algorithm is depicted in
Figure 4.
The proposed solution, similar to DV-Hop, comprises three phases, but the second step includes a refinement sub-step.
The localization of unidentified nodes is initiated by anchors. To initiate localization, each anchor specifically sends a begin anchor msg (BAG) message to its neighbors. The BAG message consists of the fields (N_ID, coordinates, hop value), where N_ID is the node identification, coordinates are the node’s location, and hop value is the node’s hop count. Each node that receives this message evaluates its location before forwarding it to its neighbors. By employing this method, we guarantee that the closest nodes to the anchor nodes are localized first and sequentially. Every node that receives this message stores the identifier and approximate position of its neighbor. Once a node has at least three anchors and/or neighbors, it may use multiplication to determine its location.
Recall that each node has a table named H_Table that includes the hop value and the coordinates of every other node. Phases 1 and 2 of this study provide the data. The N_ID and the coordinates of the neighboring node are stored in the H_Table, and this table is updated whenever a BAG message is received from a neighbor.
To minimize message forwarding and energy consumption and increase network lifespan, the last two phases of the proposed algorithm utilize controlled flooding or thresholding.
If the anchor and unknown nodes have just one hop value, distance estimation is performed using the
RSSI approach, as suggested by L. Girod et al. in [
36] using Equation (14).
where
d is the distance,
A is the transmitted power at the transmitter node,
RSSI is the transmitter power at the received signal, and
n is the attenuation constant.
The
RSSI method involves anchor nodes sending beacons to every nearby node in the given dataset, and the neighbors respond with a beacon containing signal strength data. Using the RSSI value doesn’t call for any specialized hardware or add extra expenses because the MAC sub-layer in the majority of current WSNs computes and transfers the
RSSI value for every received packet to higher layers. The
RSSI can be calculated using Equation (15):
Theoretically, with path loss assumed to be negligible, the signal intensity is proportional to the distance between anchors and adjacent nodes. From this information, the distance of an anchor node to a neighboring node can be calculated for a single hop.
Each anchor
i calculates its approximate AHD under a specific threshold using Equation (16) to minimize the amount of energy used:
In WSN, nodes are deployed randomly, resulting in non-linear paths between them that can cause the AHD to be larger than the actual value and introduce errors in estimation. Improving the precision of the AHD increases the accuracy of estimated locations. In the proposed algorithm, we introduce a refinement step in AHD calculation under threshold “t” to minimize errors in estimated positions and improve localization accuracy, rather than using broadcast communication. This is achieved by defining a new formulation for AHD calculation in this phase.
In a WSN where nodes are deployed randomly, the AHD (which represents the distance between nodes) is not a straight line and can deviate significantly from its actual value. In contrast, the Euclidian distance formula is applied to a straight line. This leads to large errors when the AHD error is multiplied by the hop count value.
Each anchor is able to determine its own refine error value as a result of the error correction formula, which has the consequence of effectively reducing the cumulative error when identifying unknown nodes. It is important to note that the AHD of all anchors are correct to a sufficient degree in the scenario being discussed, and that the best possible solution has been found. To reduce this error, the AHD is corrected by subtracting it from the communication radius and multiplying the result by the hop count value before dividing the full expression by the communication radius. This correction results in a small difference between the real and estimated coordinates, thereby improving accuracy under a specific threshold. In our simulation, we varied the threshold value from three to eight. We determined the most appropriate threshold value through iterative execution of the proposed algorithm to achieve the desired accuracy. The error calculation in the second phase of DV-Hop, as shown in Equation (17), can be fine-tuned to improve accuracy.
The correction term (
REF) and the anchor’s minimum hop count (
HC) from an unknown node u, as well as the communication range (
R), are used to calculate the refined AHD value for each anchor under a specific threshold. The network broadcasts this refined AHD value. The distance (
di) between “
i” and “
u” within a specific threshold is then determined using Equation (18):
In the final stage, the unknown node improves the accuracy of its estimated coordinates using the least-squares method for a specific threshold “t”, as shown in the Equations (10)–(13). The proposed solution reduces energy consumption and improves localization accuracy by minimizing errors.
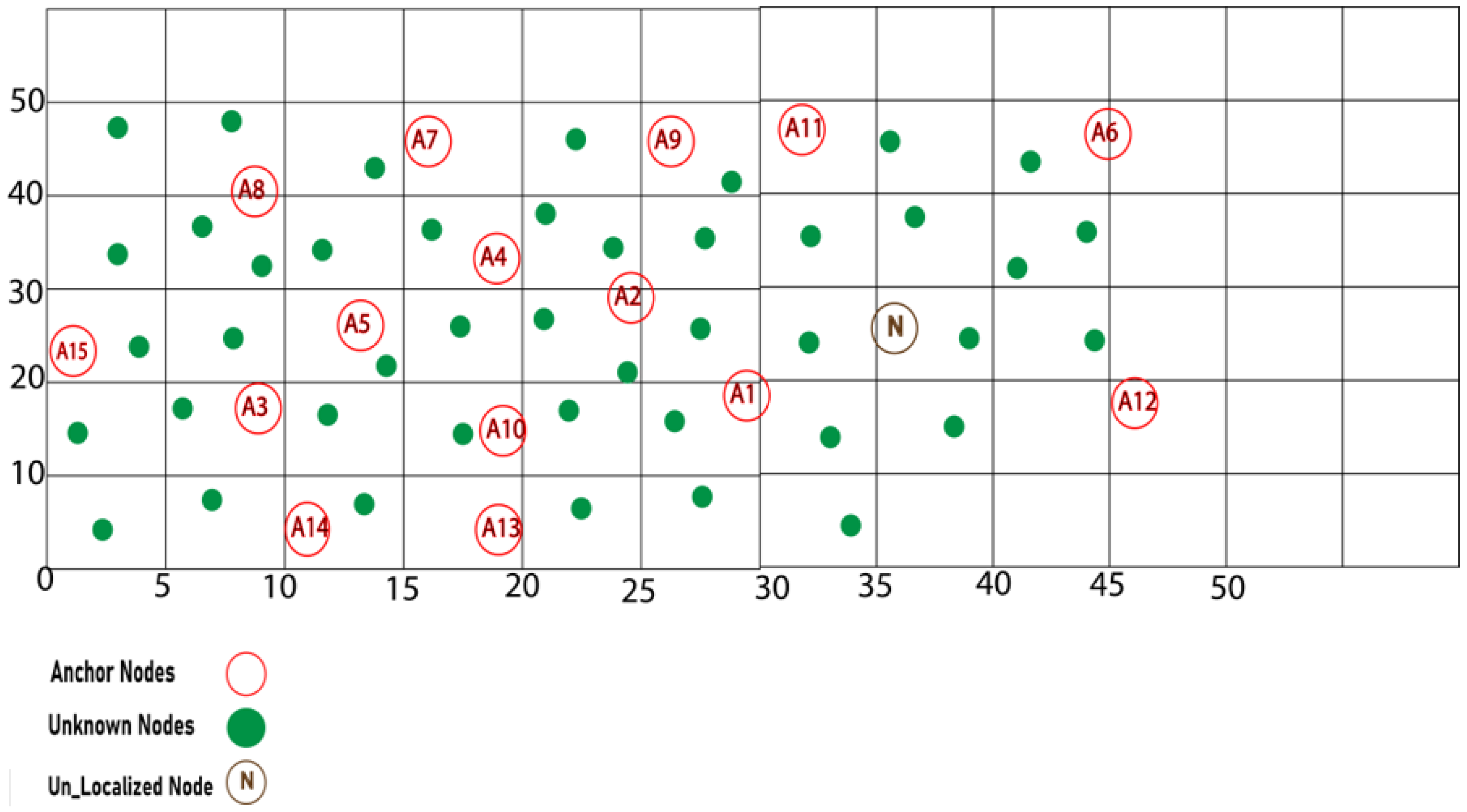
4. Example Scenario of the Proposed HCEDV-Hop Algorithm
In an WSN with a 50 * 50 m
2 region, 15 anchors and 35 unknown nodes are dispersed randomly with a communication radius of 10 m, as depicted in
Figure 5. Suppose we wish to discover the position of a particular node “N” in the WSN grid with actual coordinates
.
Node “N” follows the steps below to estimate its coordinates:
Phase 1. The first stage is identical to the DV-Hop process. As indicated in
Table 1, the anchor nodes provide information to all other nodes.
Table 2 provides the minimum hop value of a node “N” from each anchor node.
Phase 2. Equation (16) is used in this phase to compute the AHD of all anchor nodes under a specific threshold. The AHD for each network anchor is shown in
Table 3. Then, we calculate the AHD correction using Equation (17), which is shown in
Table 4. After calculating the AHD from each anchor, Node “N” adds the refinement and calculates the distance under a specific threshold, as illustrated in Equation (18). The distance between node “N” and each anchor is depicted in
Table 5.
Phase 3. The position is estimated using the least-squares approach for a given threshold with six hops to locate the node “N” location.
The coordinates of unknown nodes can be calculated using Equation (10), where
Solving Equation (10) produces node “N” coordinates much closer to the actual values.
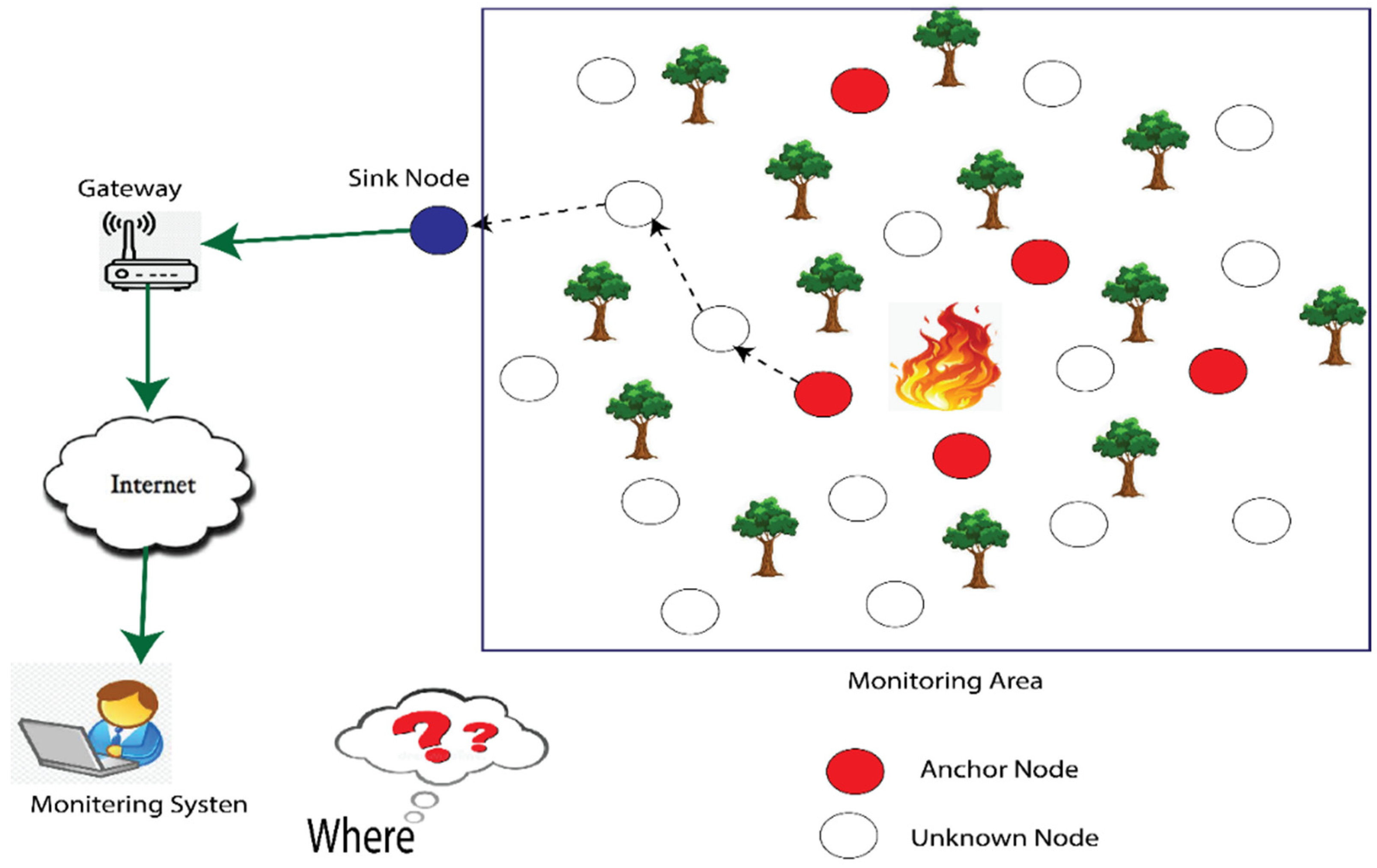
The proposed algorithm can be used for various applications. Possible application scenarios (static anchor and unlocalized static nodes) include the case in which a WSN is deployed in an industry/factory to monitor the temperature and vibration of different machines and equipment. The WSN is composed of anchor nodes and unlocalized nodes. The anchor nodes could also be used for other purposes, such as providing power to the unlocalized nodes, or acting as routers to relay data from the unlocalized nodes to the central server. These anchor nodes have GPS or other external localization capabilities and serve as reference points for the localization of the unlocalized nodes. They act as gateways to the central server and are used to communicate with the unlocalized nodes, supplying the essential information for calculating their positions. The unlocalized nodes could be placed on or near a wide range of machines and equipment, such as pumps, motors, and conveyor belts, depending on the specific needs of the factory, to measure temperature and vibration. These unlocalized nodes do not have GPS or other external localization capabilities, and they communicate with the anchor nodes using wireless signals. The unlocalized nodes are not linked to the central server; therefore, they communicate sensor data to the anchor nodes, which utilize the method to determine the unlocalized nodes’ positions based on hop count information and wireless signal RSSI. It uses a distributed technique in which each network node is able to perform localization computations. In the first phase, each node determines its minimum hop value, stored in the H_Table. In the second phase, if the hop value is one, then its distance is measured by RSSI using Equation (14) otherwise, the AHD is calculated using Equation (16) and then the refinement step is performed using Equation (17). Based on this refined AHD, the algorithm uses the refined AHD to compute the distance between the unlocalized node and the anchor nodes by using Equation (18) in the last phase. This distance is then used to estimate the location of the unlocalized node by multilateration. Once the algorithm has converged and estimated the unlocalized node’s position, the anchor nodes transmit the localization information to the central server. The central server could use this information to provide real-time monitoring and analysis of temperature and vibration in the factory, as well as historical trend analysis. The central server could also incorporate machine learning models to analyze the sensor data, automatically identify patterns in the data, and notify the factory operators of potential issues. The detailed location and sensor data can provide valuable insights for the maintenance and operation of the factory.
Overall, this scenario describes a wireless sensor network that can be used to monitor the conditions of the machines and equipment in an industrial factory. The WSN can be configured to handle the specific needs of the factory and the proposed algorithm can be implemented in a factory environment to accurately locate unlocalized nodes, therefore providing valuable insights for maintenance, operation, and predictive maintenance. It is worth noting that the proposed algorithm assumes that the network is static and that the anchor nodes and unlocalized nodes are placed at fixed locations. As with any localization algorithm, the accuracy of the proposed algorithm depends on the quality of the input data (hop count and RSSI measurements) and the environment; therefore, it may require some form of calibration and fine-tuning to achieve optimal performance in a specific environment.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}