
Analysis and Experiment of Wireless Optical Communications in Applications Dedicated to Mobile Devices with Applicability in the Field of Road and Pedestrian Safety


Abstract
:
1. Introduction
2. State of the Art in Optical Wireless Communications
2.1. The Contribution of Optical Camera Communications in the Processes of Information Transmission
2.2. The Contribution of Communications Based on Visible Light in the Transmission of Information
3. Experimental Data and Results
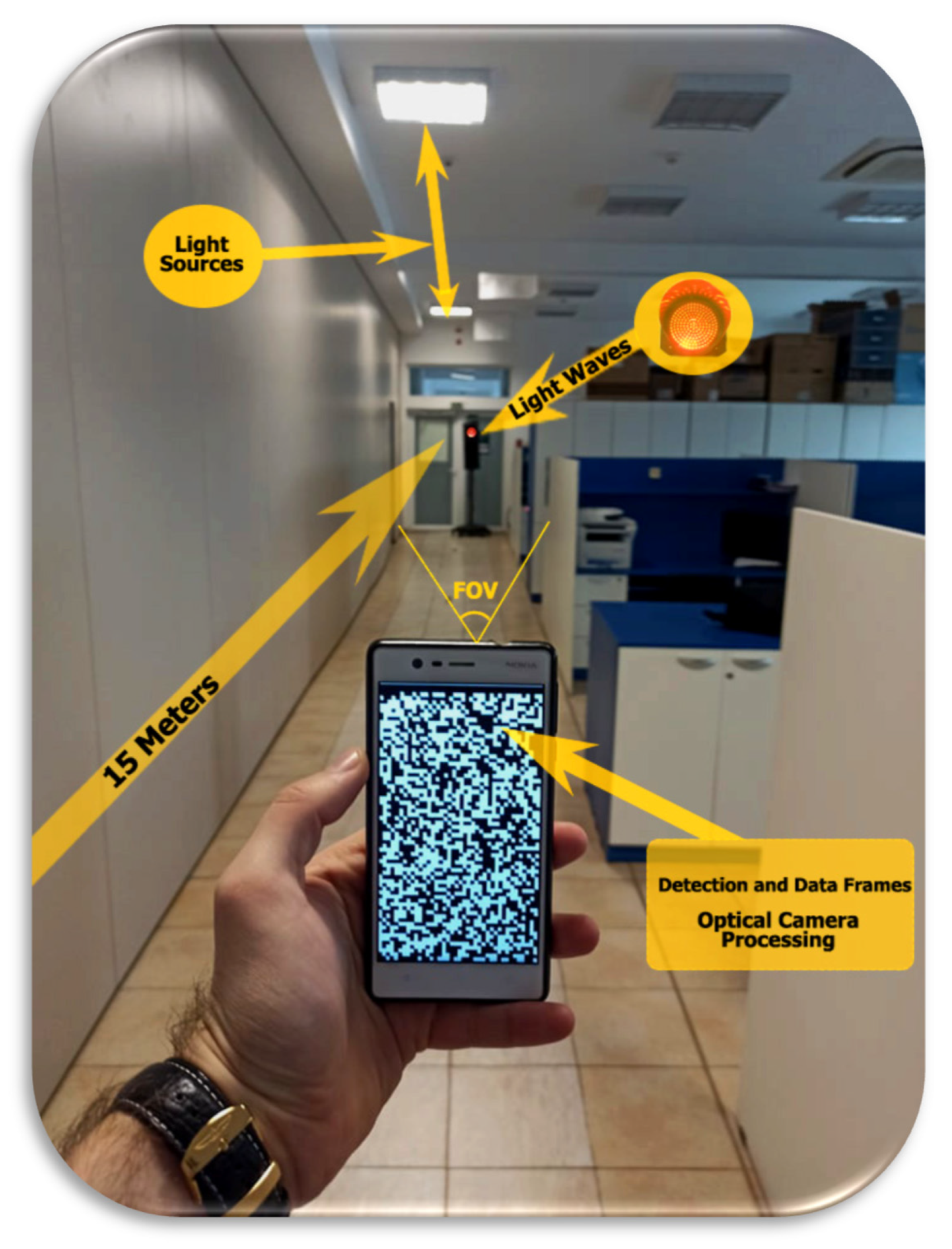
3.1. Usefulness of Camera-Based Optical Communications in the Detection Process
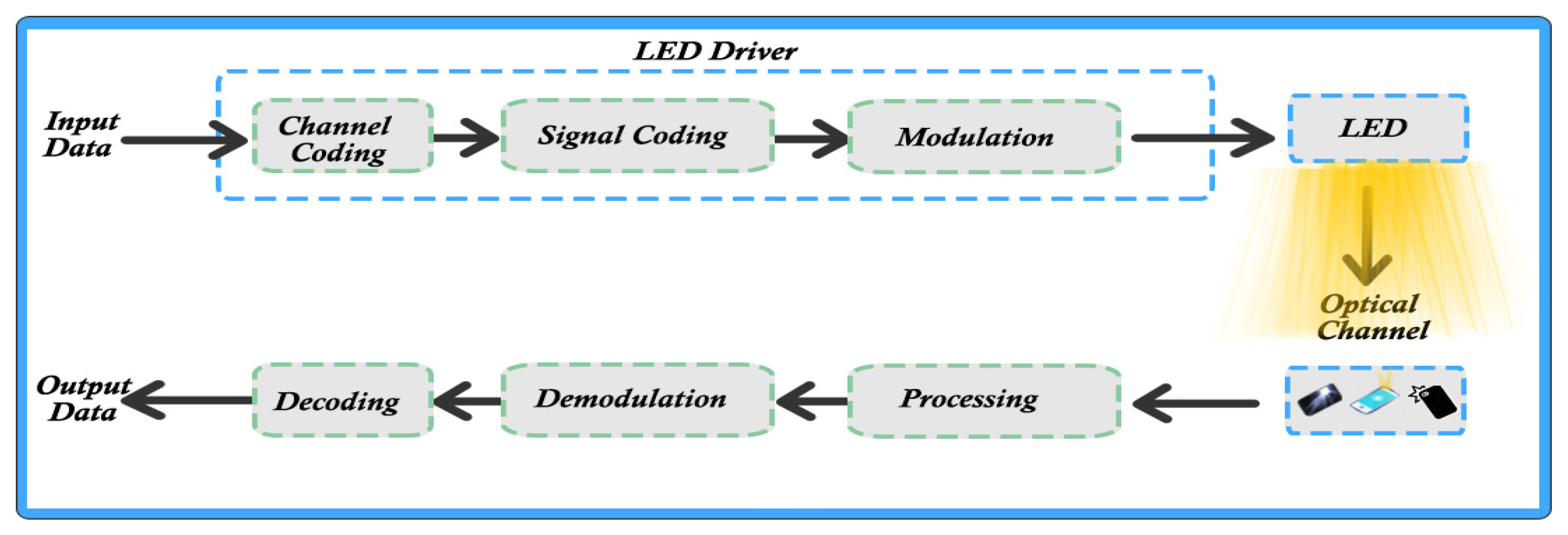
3.1.1. Techniques for Extracting Information from an LED Using Optical Communications
3.1.2. Real-Time Analysis and Processing through Optical Camera Communication Applications
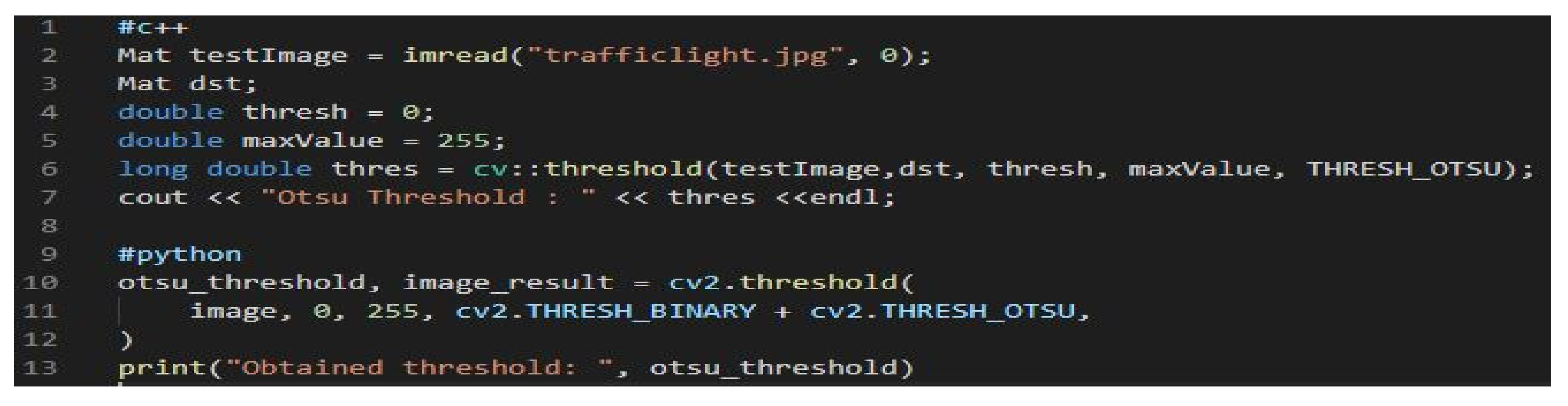
3.1.3. Projective Exposure of Regressive Transformations by Parameterizable Methods and Histograms
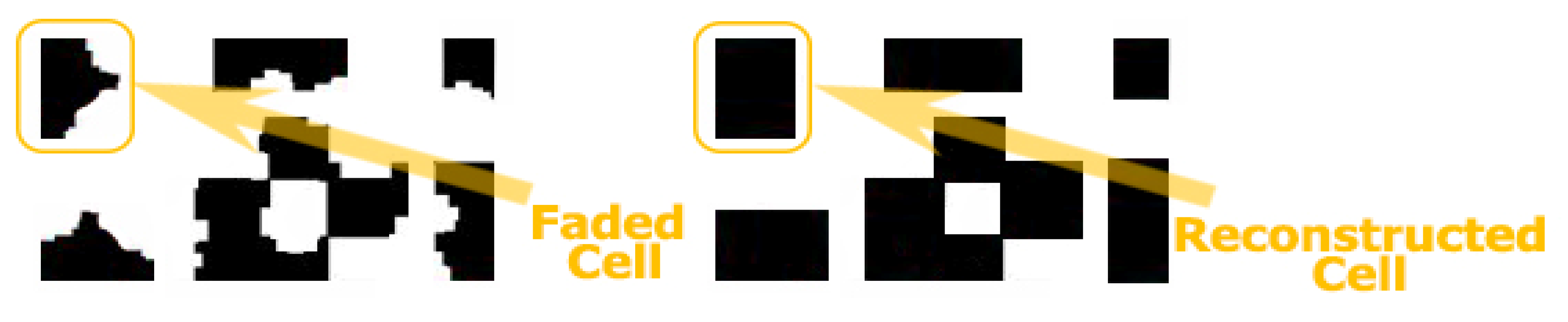
- Black and white cells/pixels: the outline of each cell, whether black or white, is a bit rate. When we have the modulation output in the form of an M × N matrix, it is allocated at intensity levels 0–255.
- Gradient cells/pixels (gray): for this operation, each binary model that is contoured follows a consecutive order with a quantity of 8 bits, being in turn represented by a decimal value 0–255. The output is also according to the matrix expression M × N.
- RGB cells/pixels: for this color format, most of the pixels are represented by the following three color components, at different intensities between 0 and 255. Therefore, for each cell, an input data stream is represented for those bits. The differentiation is made when the output has the shape M × N × 3, having a three-dimensional shape. The dimensions of the display matrices that are generated depend very much on the screen size of the device from which the measurements take place. If the amount of data is extremely large, then the data are divided into much smaller streams, and there is an image conversion.
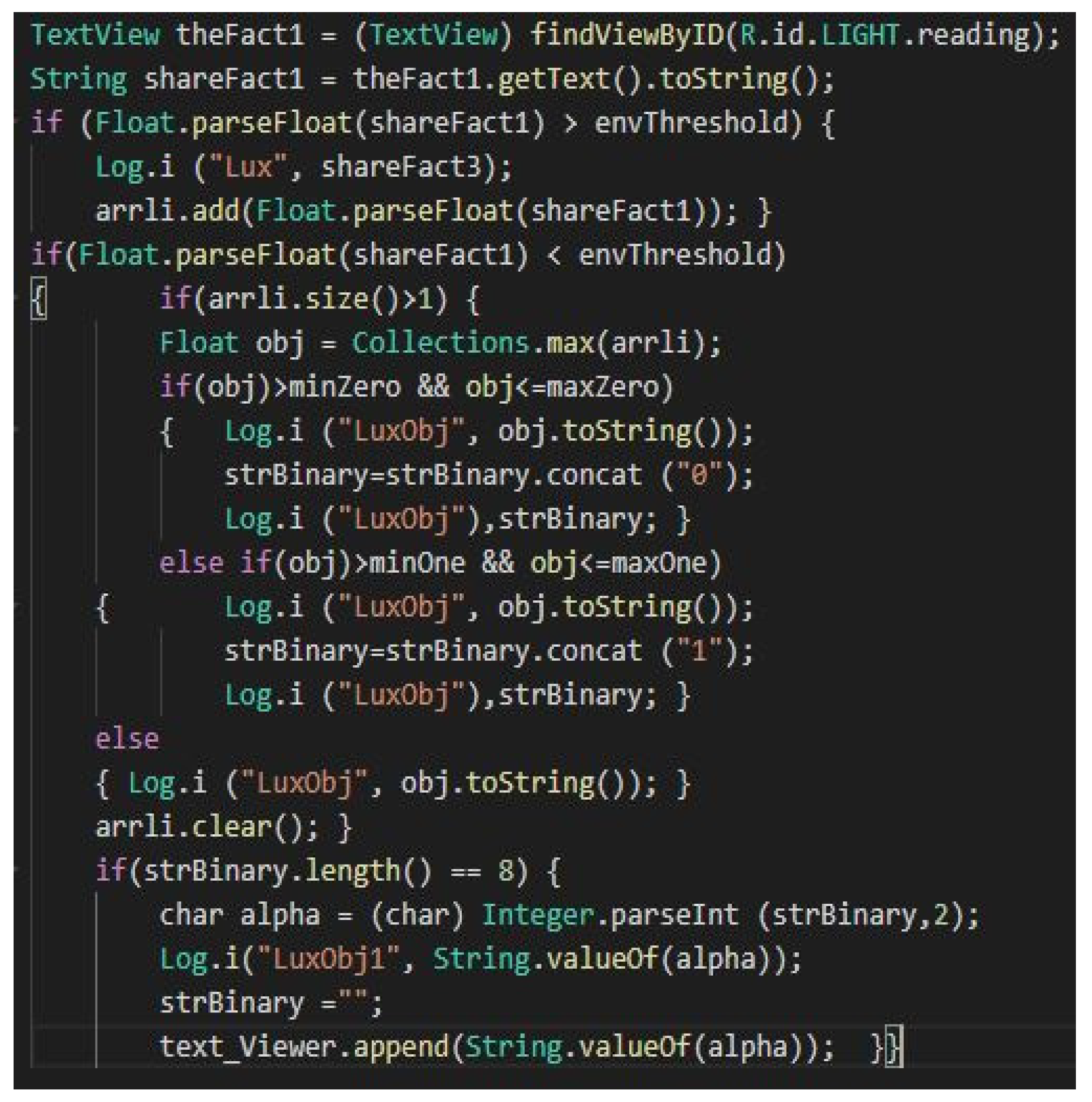
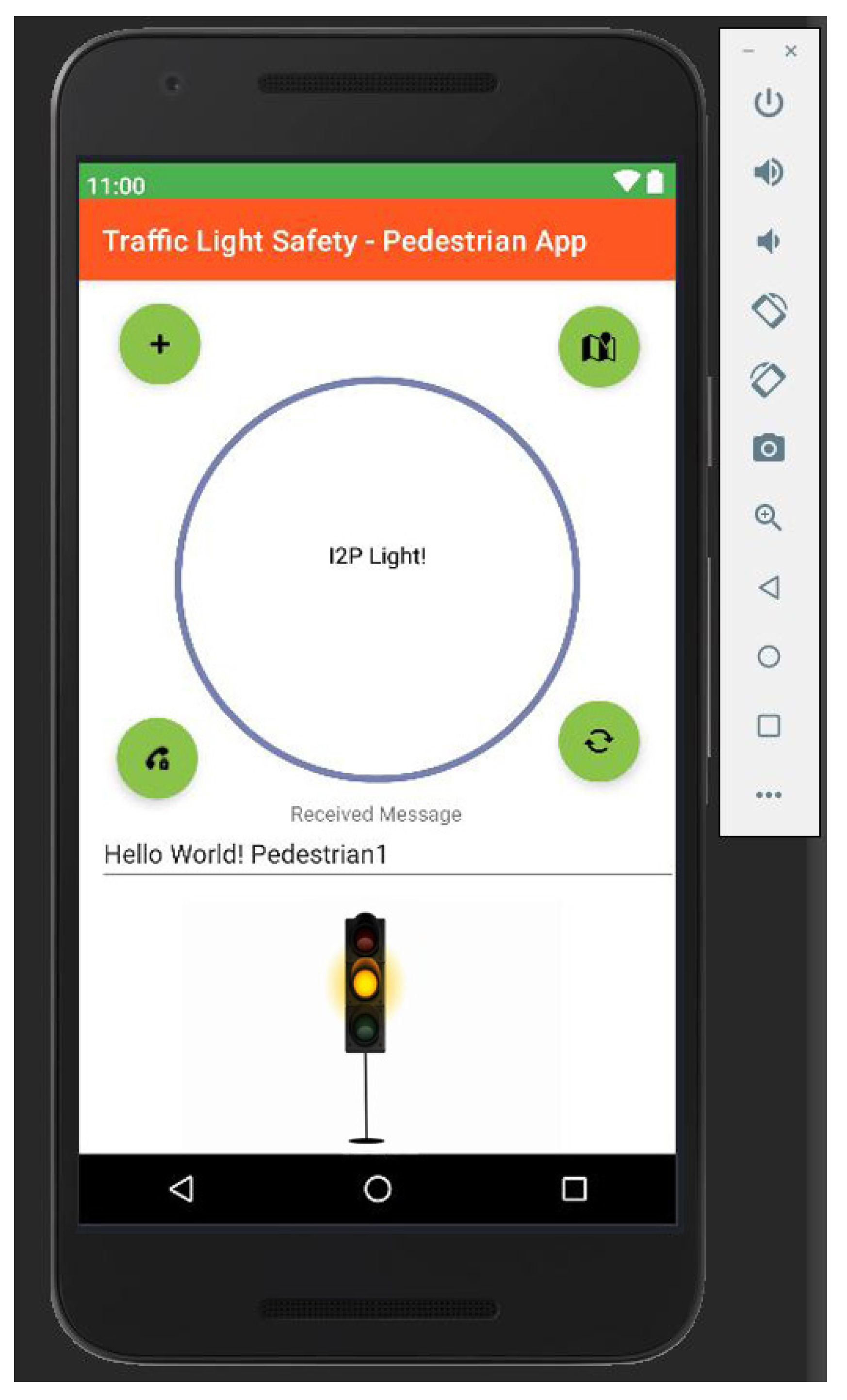
3.2. Utility of Environmental Sensors in Mobile Telephony in the Direct Communication Process
- –
- Divide the brightness range between minimum and maximum equally for each character; the ambient light sensor will not be effective if it needs to analyze all 255 characters from a greater distance.
- –
- TrafficLightI2P color and hazardous area identification returned tangible values regardless of background noise or brightness value.
- –
- The measurements were performed at a time of day when the entire lighting system was at full capacity and created a disruptive factor in most of the areas analyzed.
- –
- Messages sent from another device in the nearby area complied with the algorithm, and the transmission interval for ASCII and decoding characters did not exceed 10 ms.
4. Discussion
5. Conclusions
Funding
Informed Consent Statement
Conflicts of Interest
References
- U.S. Department of Transportation Research and Innovative Technology Administration. Frequency of Target Crashes for IntelliDrive Safety Systems; Technical Report; U.S. Department of Transportation Research and Innovative Technology Administration: Washington, DC, USA, 2010.
- World Health Organization WHO. The 10 Leading Causes of Death in the World, 2017 and 2018. Fact Sheet. Available online: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (accessed on 14 November 2021).
- Ashraf, I.; Hur, S.; Shafiq, M.; Park, Y. Catastrophic factors involved in road accidents: Underlying causes and descriptive analysis. PLoS ONE 2019, 14, e0223473. [Google Scholar] [CrossRef] [Green Version]
- Chang, F.R.; Huang, H.L.; Schwebel, D.C.; Chan, A.H.S.; Hu, G.Q. Global road traffic injury statistics: Challenges, mechanisms and solutions. Chin. J. Traumatol. 2020, 23, 216–218. [Google Scholar] [CrossRef]
- Yannis, G.; Papadimitriou, E.; Folla, K. Effect of GDP changes on road traffic fatalities. Saf. Sci. 2014, 63, 42–49. [Google Scholar] [CrossRef]
- Komarnicka, A.; Murawska, A. Comparison of Consumption and Renewable Sources of Energy in European Union Countries-Sectorial Indicators, Economic Conditions and Environmental Impacts. Energies 2021, 14, 3714. [Google Scholar] [CrossRef]
- Mobility and Transport—Curent Trends and Issues Transport in the European Union—Edition 2020 from European Commission Transportation. 10 July 2021. Available online: https://www.consilium.europa.eu/en/council-eu/configurations/tte/ (accessed on 14 November 2021).
- Corral, P.; Rodríguez-Mas, F.; Alonso, J.L.; Ferrer, J.C.; Fernández de Ávila, S. A Low-Cost IEEE 802.15.7 Communication System Based on Organic Photodetection for Device-to-Device Connections. Sensors 2020, 20, 714. [Google Scholar] [CrossRef] [Green Version]
- Palacios Játiva, P.; Román Cañizares, M.; Azurdia-Meza, C.A.; Zabala-Blanco, D.; Dehghan Firoozabadi, A.; Seguel, F.; Montejo-Sánchez, S.; Soto, I. Interference Mitigation for Visible Light Communications in Underground Mines Using Angle Diversity Receivers. Sensors 2020, 20, 367. [Google Scholar] [CrossRef] [Green Version]
- Rabadan, J.; Guerra, V.; Rodríguez, R.; Rufo, J.; Luna-Rivera, M.; Perez-Jimenez, R. Hybrid Visible Light and Ultrasound-Based Sensor for Distance Estimation. Sensors 2017, 17, 330. [Google Scholar] [CrossRef]
- Long, X.; He, J.; Zhou, J.; Fang, L.; Zhou, X.; Ren, F.; Xu, T. A review on light-emitting diode based automotive headlamps. Renew. Sustain. Energy Rev. 2015, 41, 29–41. [Google Scholar] [CrossRef]
- He, Y.; Liu, Z.; Zhou, X.; Zhong, B. Analysis of Urban Traffic Accidents Features and Correlation with Traffic Congestion inLarge-Scale Construction District. In Proceedings of the 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changsha, China, 27–28 May 2017; IEEE: Changsha, China, 2017; pp. 641–644. [Google Scholar]
- Lee, J.; Chung, J.; Sohn, K. Reinforcement Learning for Joint Control of Traffic Signals in a Transportation Network. IEEE Trans. Veh. Technol. 2020, 69, 1375–1387. [Google Scholar] [CrossRef]
- Tsonev, D.; Chun, H.; Rajbhandari, S.; McKendry, J.J.; Videv, S.; Gu, E.; Haji, M.; Watson, S.; Kelly, A.E.; Faulkner, G.; et al. A 3-Gb/s Single-LED OFDM-Based Wireless VLC Link Using a Gallium Nitride μLED. IEEE Photonics Technol. Lett. 2014, 26, 637–640. [Google Scholar] [CrossRef]
- Chun, H.; Rajbhandari, S.; Faulkner, G.; Tsonev, D.; Xie, E.; McKendry, J.J.; Gu, E.; Dawson, M.D.; O’Brien, D.C.; Haas, H. LED Based Wavelength Division Multiplexed 10 Gb/s Visible Light Communications. J. Light. Technol. 2016, 34, 3047–3052. [Google Scholar] [CrossRef] [Green Version]
- Cama-Pinto, D.; Damas, M.; Holgado-Terriza, J.A.; Gómez-Mula, F.; Calderin-Curtidor, A.C.; Martínez-Lao, J.; Cama-Pinto, A. 5G Mobile Phone Network Introduction in Colombia. Electronics 2021, 10, 922. [Google Scholar] [CrossRef]
- Careglio, D.; Spadaro, S.; Cabellos, A.; Lazaro, J.A.; Barlet-Ros, P.; Gené, J.M.; Perelló, J.; Agraz Bujan, F.; Suárez-Varela, J.; Pàges, A.; et al. Results and Achievements of the ALLIANCE Project: New Network Solutions for 5G and Beyond. Appl. Sci. 2021, 11, 9130. [Google Scholar] [CrossRef]
- Waqar, S.; Pätzold, M. Interchannel Interference and Mitigation in Distributed MIMO RF Sensing. Sensors 2021, 21, 7496. [Google Scholar] [CrossRef]
- Saraereh, O.A.; Ali, A.; Khan, I.; Rabie, K. Interference Analysis for Vehicle-to-Vehicle Communications at 28 GHz. Electronics 2020, 9, 262. [Google Scholar] [CrossRef] [Green Version]
- Song, T.; Lim, C.; Nirmalathas, A.; Wang, K. Optical Wireless Communications Using Signal Space Diversity with Spatial Modulation. Photonics 2021, 8, 468. [Google Scholar] [CrossRef]
- Hossan, M.; Chowdhury, M.Z.; Hasan, M.; Shahjalal, M.; Nguyen, T.; Le, N.T.; Jang, Y.M. A new vehicle localization scheme based on combined optical camera communication and photogrammetry. Mob. Inf. Syst. 2018, 2018, 8501898. [Google Scholar] [CrossRef] [Green Version]
- Nakazawa, Y.; Makino, H.; Nishimori, K.; Wakatsuki, D.; Komagata, H. Indoor positioning using a high-speed, fish-eyelens-equipped camera in visible light communication. In Proceedings of the Fourth International Conference on Indoor Positioning Indoor Navigation, Montbeliard-Belfort, France, 24 May 2013. [Google Scholar]
- Lee, H.Y.; Lin, H.M.; Wei, Y.L.; Wu, H.I.; Tsai, H.M.; Lin, K.C. RollingLight: Enabling line-of-sight light-to-camera communications. In Proceedings of the Thirteenth Annual International Conference on Mobile Systems (ACM MobiSys), Florence, Italy, 18–22 May 2015. [Google Scholar]
- Ghassemlooy, Z.; Luo, P.; Zvanovec, S. Optical camera communications. In Optical Wireless Communications; Uysal, M., Capsoni, C., Ghassemlooy, Z., Boucouvalas, A., Udvary, E., Eds.; Springer: Cham, Switzerland, 2016; pp. 547–568. [Google Scholar]
- Saha, N.; Ifthekhar, M.S.; Le, N.T.; Jang, Y.M. Survey on optical camera communications: Challenges and opportunities. IET Optoelectron. 2015, 9, 172–183. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Dimian, M. Inter-Urban Analysis of Pedestrian and Drivers through a Vehicular Network Based on Hybrid Communications Embedded in a Portable Car System and Advanced Image Processing Technologies. Remote Sens. 2021, 13, 1234. [Google Scholar] [CrossRef]
- Du, X.; Ang, M.H.; Rus, D. Car detection for autonomous vehicle: LIDAR and vision fusion approach through deep learning framework. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 749–754. [Google Scholar]
- Zhou, Y.; Wang, G.; Xu, G.; Fu, G. Safety driving assistance system design in intelligent vehicles. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 2637–2642. [Google Scholar]
- Zamkah, A.; Hui, T.; Andrews, S.; Dey, N.; Shi, F.; Sherratt, R.S. Identification of Suitable Biomarkers for Stress and Emotion Detection for Future Personal Affective Wearable Sensors. Biosensors 2020, 10, 40. [Google Scholar] [CrossRef] [Green Version]
- Cailean, A.-M.; Dimian, M.; Popa, V. Noise-Adaptive Visible Light Communications Receiver for Automotive Applications: A Step Toward Self-Awareness. Sensors 2020, 20, 3764. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Chen, E.; Tang, X.; Fu, B. A Modified Pedestrian Retrieval Method Based on Faster R-CNN with Integration of Pedestrian Detection and Re-Identification. In Proceedings of the 2018 International Conference on Audio, Language and Image Processing (ICALIP), Shanghai, China, 16–17 July 2018; pp. 63–66. [Google Scholar]
- Cahyadi, W.A.; Chung, Y.H.; Ghassemlooy, Z.; Hassan, N.B. Optical Camera Communications: Principles, Modulations, Potential and Challenges. Electronics 2020, 9, 1339. [Google Scholar] [CrossRef]
- Avătămăniței, S.-A.; Beguni, C.; Căilean, A.-M.; Dimian, M.; Popa, V. Evaluation of Misalignment Effect in Vehicle-to-Vehicle Visible Light Communications: Experimental Demonstration of a 75 Meters Link. Sensors 2021, 21, 3577. [Google Scholar] [CrossRef]
- Hu, W.; Cong, H.; Huang, W.; Huang, Y.; Chen, L.; Pan, A.; Xue, C. Germanium/perovskite heterostructure for high-performance and broadband photodetector from visible to infrared telecommunication band. Light Sci. Appl. 2019, 8, 106. [Google Scholar] [CrossRef] [Green Version]
- International Commission on Non-Ionizing Radiation Protection (ICNIRP). Light-Emitting Diodes (LEDS): Implications for Safety. Health Phys. 2020, 118, 549–561. [Google Scholar] [CrossRef]
- Joubert, D.; Hébert, M.; Konik, H.; Lavergne, C. Characterization setup for event-based imagers applied to modulated light signal detection. Appl. Opt. 2019, 58, 1305–1317. [Google Scholar] [CrossRef]
- Gallego, G.; Delbruck, T.; Orchard, G.; Bartolozzi, C.; Taba, B.; Censi, A.; Leutenegger, S.; Davison, A.; Conradt, J.; Daniilidis, K.; et al. Event-based Vision: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 44, 154–180. [Google Scholar] [CrossRef]
- Rahman, M.R.; Adedara, K.; Ashok, A. Enabling Multiple Access in Visible Light Communication Using Liquid Crystal Displays: A Proof-of-Concept Study. Electronics 2020, 9, 826. [Google Scholar] [CrossRef]
- Skorupski, P.; Chittka, L. Photoreceptor Processing Speed and Input Resistance Changes during Light Adaptation Correlate with Spectral Class in the Bumblebee, Bombus impatiens. PLoS ONE 2011, 6, e25989. [Google Scholar] [CrossRef]
- Cailean, A.; Cagneau, B.; Chassagne, L.; Popa, V.; Dimian, M. A survey on the usage of DSRC and VLC in communication-based vehicle safety applications. In Proceedings of the IEEE 21st Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Delft, The Netherlands, 10 November 2014; pp. 69–74. [Google Scholar]
- Shen, W.; Tsai, H. Testing vehicle-to-vehicle visible light communications in real-world driving scenarios. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 187–194. [Google Scholar]
- Zhang, Y.; Zhang, M.; Zhou, H.; Sun, Y.; Wei, C.; He, W. A Long Distance Real-time DPSK Visible Light Communication System Based on FPGA. In Proceedings of the 18th International Conference on Optical Communications and Networks, Huangshan, China, 5–8 August 2019; pp. 1–3. [Google Scholar]
- Liu, W.; Xu, Z. Some practical constraints and solutions for optical camera communication. Philos. Trans. Ser. A Math. Phys. Eng. Sci. 2020, 378, 20190191. [Google Scholar] [CrossRef] [Green Version]
- Teli, S.R.; Matus, V.; Zvanovec, S.; Perez-Jimenez, R.; Vitek, S.; Ghassemlooy, Z. Optical Camera Communications for IoT–Rolling-Shutter Based MIMO Scheme with Grouped LED Array Transmitter. Sensors 2020, 20, 3361. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.K.; Bae, M.; Kim, H. Future of IoT Networks: A Survey. Appl. Sci. 2017, 7, 1072. [Google Scholar] [CrossRef]
- Hasan, M.K.; Chowdhury, M.Z.; Shahjalal, M.; Nguyen, V.T.; Jang, Y.M. Performance Analysis, and Improvement of Optical Camera Communication. Appl. Sci. 2018, 8, 2527. [Google Scholar] [CrossRef] [Green Version]
- Komorowski, P.; Czerwińska, P.; Kaluza, M.; Surma, M.; Zagrajek, P.; Sobczyk, A.; Ciurapiński, W.; Piramidowicz, R.; Siemion, A. Frequency Division Multiplexing of Terahertz Waves Realized by Diffractive Optical Elements. Appl. Sci. 2021, 11, 6246. [Google Scholar] [CrossRef]
- Lee, H.-K.; Choo, J.; Kim, J. Multiplexed Passive Optical Fiber Sensor Networks for Water Level Monitoring: A Review. Sensors 2020, 20, 6813. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.; Tian, P.; Xu, Z. Design, and implementation of a real-time CIM-MIMO optical camera communication system. Opt. Express 2016, 24, 24567. [Google Scholar] [CrossRef]
- Luo, P.; Zhang, M.; Ghassemlooy, Z.; Le Minh, H.; Tsai, H.M.; Tang, X.; Png, L.C.; Han, D. Experimental demonstration of RGB LED-based optical camera communications. IEEE Photonics J. 2015, 7, 1–12. [Google Scholar] [CrossRef]
- Rachim, V.P.; Chung, W. Multilevel intensity-modulation for rolling shutter-based optical camera communication. IEEE Photonics Technol. Lett. 2018, 30, 903–906. [Google Scholar] [CrossRef]
- Chen, H.W.; Wen, S.S.; Wang, X.L.; Liang, M.Z.; Li, M.Y.; Li, Q.C.; Liu, Y. Color-shift keying for optical camera communication using a rolling shutter mode. IEEE Photonics J. 2019, 11, 1–8. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, L.; Yang, Y.; Wu, R.; Zhang, L.; Chen, L.; Wu, D.; She, J. Improved optical camera communication systems using a freeform lens. Opt. Express 2021, 29, 34066–34076. [Google Scholar] [CrossRef]
- Cahyadi, W.A.; Kim, Y.H.; Chung, Y.H.; Ahn, C. Mobile phone camera-based indoor visible light communications with rotation compensation. IEEE Photonics J. 2016, 8, 1–8. [Google Scholar] [CrossRef]
- Incipini, L.; Belli, A.; Palma, L.; Ballicchia, M.; Pierleoni, P. Sensing Light with LEDs: Performance Evaluation for IoT Applications. J. Imaging 2017, 3, 50. [Google Scholar] [CrossRef] [Green Version]
- Ullah, S.; Mohaisen, M.; Alnuem, M.A. A Review of IEEE 802.15.6 MAC, PHY, and Security Specifications. Int. J. Distrib. Sens. Netw. 2013, 9, 950704. [Google Scholar] [CrossRef]
- Sum, C.S.; Zhou, M.T.; Kojima, F.; Harada, H. Experimental Performance Evaluation of Multihop IEEE 802.15.4/4g/4e Smart Utility Networks in Outdoor Environment. Wirel. Commun. Mob. Comput. 2017, 2017, 7137406. [Google Scholar] [CrossRef] [Green Version]
- Gancarz, J.E.; Elgala, H.; Little, T.D. Overlapping PPM for band-limited visible light communication and dimming. J. Sol. State Light. 2015, 2, 3. [Google Scholar] [CrossRef] [Green Version]
- Teli, S.R.; Zvanovec, S.; Ghassemlooy, Z. The first tests of smartphone camera exposure on optical camera communication links. In Proceedings of the 2019 15th International Conference on Telecommunications (ConTEL), Graz, Austria, 3–5 July 2019; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Chua, J.B.Y. System and Method for Enhancing Light Emissions from Light Packages by Adjusting the Index of Refraction at the Surface of the Encapsulation Material. U.S. Patent 8,089,083, 3 January 2012. [Google Scholar]
- Pergoloni, S.; Biagi, M.; Cusani, R.; Scarano, G. Space-time multichannel adaptive filtering scheme for VLC color crosstalk equalization. Opt. Express 2018, 26, 19750–19761. [Google Scholar] [CrossRef]
- Le, T.; Le, N.T.; Jang, Y.M.; Thithanhnhan, L.; Nam-Tuan, L.; Min, J.Y. Performance of rolling shutter and global shutter camera in optical camera communications. In Proceedings of the 2015 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 28–30 October 2015; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2015; pp. 124–128. [Google Scholar]
- Meneguette, R.I.; Filho, G.P.; Guidoni, D.L.; Pessin, G.; Villas, L.A.; Ueyama, J. Increasing intelligence in inter-vehicle communications to reduce traffic congestions: Experiments in urban and highway environments. PLoS ONE 2016, 11, e0159110. [Google Scholar] [CrossRef]
- Roger, S.; Martín-Sacristán, D.; Garcia-Roger, D.; Monserrat, J.F.; Kousaridas, A.; Spapis, P.; Ayaz, S. 5G V2V Communication With Antenna Selection Based on Context Awareness: Signaling and Performance Study. IEEE Trans. Intell. Transp. Syst. 2020, 1–9. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, H.; Zhang, J.; Fastenrath, U. Multiagent-based route guidance for increasing the chance of arrival on time. In Proceedings of the AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016; pp. 3813–3820. [Google Scholar]
- Tram, V.T.B.; Yoo, M. Vehicle-to-Vehicle Distance Estimation Using a Low-Resolution Camera Based on Visible Light Communications. IEEE Access 2018, 6, 4521–4527. [Google Scholar] [CrossRef]
- Sandoval-Reyes, S. Text and Image Transmission and Reception Using Light from LEDs and a Light Sensor. In Telematics and Computing. WITCOM 2019. Communications in Computer and Information Science; Mata-Rivera, M., Zagal-Flores, R., Barría-Huidobro, C., Eds.; Springer: Cham, Switzerland, 2019; Volume 1053. [Google Scholar] [CrossRef]
- Masini, B.M.; Bazzi, A.; Zanella, A. Vehicular Visible Light Networks for Urban Mobile Crowd Sensing. Sensors 2018, 18, 1177. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Wei, Z.; Chen, C.J.; Wang, L.; Fu, H.Y.; Zhang, L.; Chen, K.-C.; Wu, M.-C.; Dong, Y.; Hao, Z. 1.3 GHz E-O bandwidth GaN-based micro-LED for multi-gigabit visible light communication. Photon. Res. 2021, 9, 792–802. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cyber. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146–165. [Google Scholar] [CrossRef]
- Liao, P.S.; Chen, T.S.; Chung, P.C. A Fast Algorithm for Multilevel Thresholding. J. Inf. Sci. Eng. 2001, 17, 713–727. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Direction | Achievement | Limitation/Challenges |
|---|---|---|---|
| [51] | Optical camera based on RGB LEDs using UPSOOK and WDM communication. | Transfer rates of approximately 140–150 bps and communication distances of over 50–60 m. | Simulations performed offline using the procedure in MATLAB. Use of a single LED RGB and much smaller capacity. |
| [52] | Using communication through the smartphone’s optical camera by modulating the intensity using four levels. | Transfer rates of about 10 kbps and a communication distance of about 2 m. | It cannot provide real-time processing. Using a single LED and limiting communication distances. |
| [53] | Using OCC and for coding, they performed the modulation by changing the color. | Transfer rates of about 8.64 kbps and a communication distance of about 4 cm. | Limited communication distances. Inability to support multiple connections through LED communications. |
| [54] | Improved optical camera communication systems using a freeform lens. | Using a freeform lens, the packet reception rate increased by 35% and the BER is reduced by 72% to a frequency of 5 kHz. | The distance for viable communication is much too short (160 lux at a distance of 1 m). |
| [55] | Indoor VLC communications using the smartphone’s camera. | The transfer rates were not noticeable being of the order of kbps and at distances of a few cm. | Mobility does not exist, and there is no support in this directive. Reduced communication distance. |
| Complexity | Performance | Bandwidth | Cost | Practicability | |
|---|---|---|---|---|---|
| RGB LED | Moderate | 65 lm/W | 15–20 MHz | High | Lighting |
| PC-LED | Low | 140 lm/W | 5–3 MHz | Low | Lighting |
| OLED | High | 50 lm/W | ≤1 MHz | Lowest | Display |
| μ-LED | Highest | - | ≥300 MHz | High | Biosensors |
| Article | Direction | Method | Results |
|---|---|---|---|
| [67] | PC-to-PC connection and transfer text, images using visible light communications. | Transfer information (the encrypted data through visible light, and receiver identifies and descripts the information). | The study was successful in sending the text and image text with accuracy of 100% and image 99% at a rate of 9600 kbps. |
| [68] | Vehicle-to-vehicle distance estimation using low-resolution camera based on visible light communications. | The work developed a high-speed and long-distance communication using VLC system and blue light LD. | The real-time transmission was 1.445 Gbit/s optical OFDM signal in 4.8 m underwater channel. The error vector magnitude was approximately 10%. |
| [69] | Transfer text and image, reception text and image using light from LEDs and a light sensor. | This work transferred the image and text to bit with Raspberry Pi platform and Python. | They successfully transferred one line of text with image 80% received. |
| [70] | Study that was based on communication using GaN micro-LEDs with E-O bandwidth (1.3 GHz for multi-gigabit visible light communications). | Based on the high-speed micro-LED, they demonstrated that a transfer rate of 2 Gbps and a BET of 1.2 × 10−3 can be obtained over a real distance of 3 m. | The results include a 4 Gbps system with multiplexing and orthogonal division in frequency and phase shift in quadrature and with a BER of 3.2 × 10−3. |
| Distance (m) | Intensity Traffic Light—Red Color (lx) | Intensity Traffic Light—Green Color (lx) |
|---|---|---|
| 1 | 4458.0 | 4812.0 |
| 5 | 3184.0 | 2445.0 |
| 10 | 2134.0 | 1957.0 |
| 15 | 1686.0 | 1468.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zadobrischi, E. Analysis and Experiment of Wireless Optical Communications in Applications Dedicated to Mobile Devices with Applicability in the Field of Road and Pedestrian Safety. Sensors 2022, 22, 1023. https://doi.org/10.3390/s22031023
Zadobrischi E. Analysis and Experiment of Wireless Optical Communications in Applications Dedicated to Mobile Devices with Applicability in the Field of Road and Pedestrian Safety. Sensors. 2022; 22(3):1023. https://doi.org/10.3390/s22031023
Chicago/Turabian StyleZadobrischi, Eduard. 2022. "Analysis and Experiment of Wireless Optical Communications in Applications Dedicated to Mobile Devices with Applicability in the Field of Road and Pedestrian Safety" Sensors 22, no. 3: 1023. https://doi.org/10.3390/s22031023
APA StyleZadobrischi, E. (2022). Analysis and Experiment of Wireless Optical Communications in Applications Dedicated to Mobile Devices with Applicability in the Field of Road and Pedestrian Safety. Sensors, 22(3), 1023. https://doi.org/10.3390/s22031023