
An Open Surface Drifter for River Flow Field Characterization




Abstract
1. Introduction
1.1. Rivers and Humans
1.2. River Flow Monitoring and Modeling
1.3. Drifters in Hydrology

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Last Seen | Last Reference | Dimensions | Price (EUR) | Positioning | IMU | Real-Time Transmission | Usage |
|---|---|---|---|---|---|---|---|
| 2007 | GRiFTers [11] | 0.1 m × Ø 0.3 m -kg | 140 | GPS | No | No |
|
| 2008 | River Drifter [12] | 0.46 m × Ø 0.1 m 3.6 kg | ≈270 | GPS | No | No |
|
| 2009 | QNA [24] | Ø 0.15 m 1.8 kg | >270 | GPS | No | Satellite (0.005 Hz) |
|
| 2015 | RTK drifter [25] | 0.26 m × Ø 0.2 m -kg | ≥€€€€ 1 | GNSS | No | No 2 |
|
| 2015 | Generation 3 [14,26] | 0.47 m × Ø 0.13 m >2.8 kg | ≈2210 | GPS | No | Zigbee and Mobile |
|
| Android [14,27] | 0.29 m × Ø 0.13 m 2.8 kg | ≈440 |
| ||||
| 2016 | GPS floater [28] | Ø 0.10 m 0.3 kg | ≥€€€ 1 | GPS | No | No |
|
| 2018 | Lagrangian drifter [16] | Ø 0.03 m 9 × 10−3 kg | ≥€€ 1 | No | 9 DOF | No |
|
| 2019 | Low power drifter [23] | - | 125 | GPS | 3 DOF | Mobile (0.017 Hz) |
|
| 2022 | Open Drifter (this work) | 0.07 m × 0.1 m × 0.05 m 0.35 kg | <150 | GNSS | 9 DOF | LoRa radio or Mobile (1–2 Hz) 2 |
|
1.4. Purpose of This Paper
2. Materials and Methods
- It needs to track its location, velocity, and orientation precisely.
- It must be able to transmit its state/data in real-time, with and without mobile connectivity.
- It needs to have a software platform to visualize its state.
- It must be easily configurable in terms of buoyancy, shape, and hardware.
- It must be designed to be open and use mainly open technology.
- It must be capable of storing data at a sampling rate higher than 1 Hz (faster than most previously published devices).
- It must be able to operate for at least 1 day continuously without losing power.
- It must be able to handle sleeping mode, for low sampling rates and longtime measuring scenarios.
- It must be a low-cost technology (< 200 €).
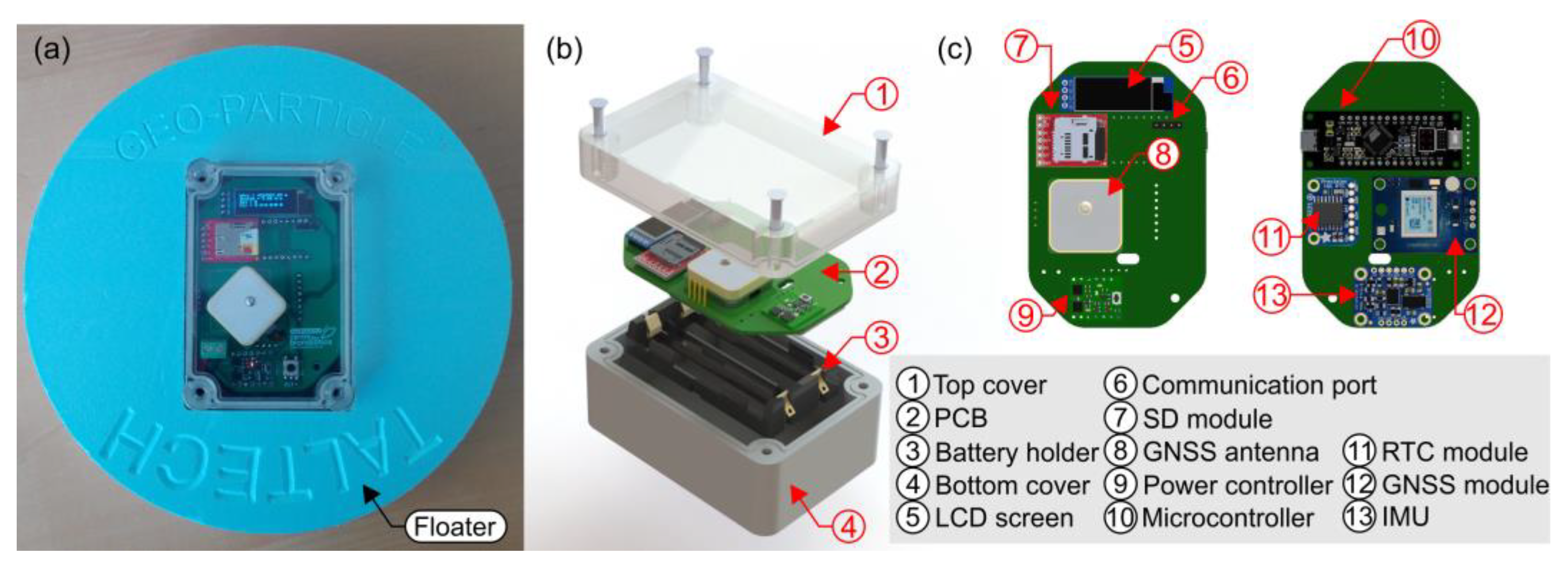
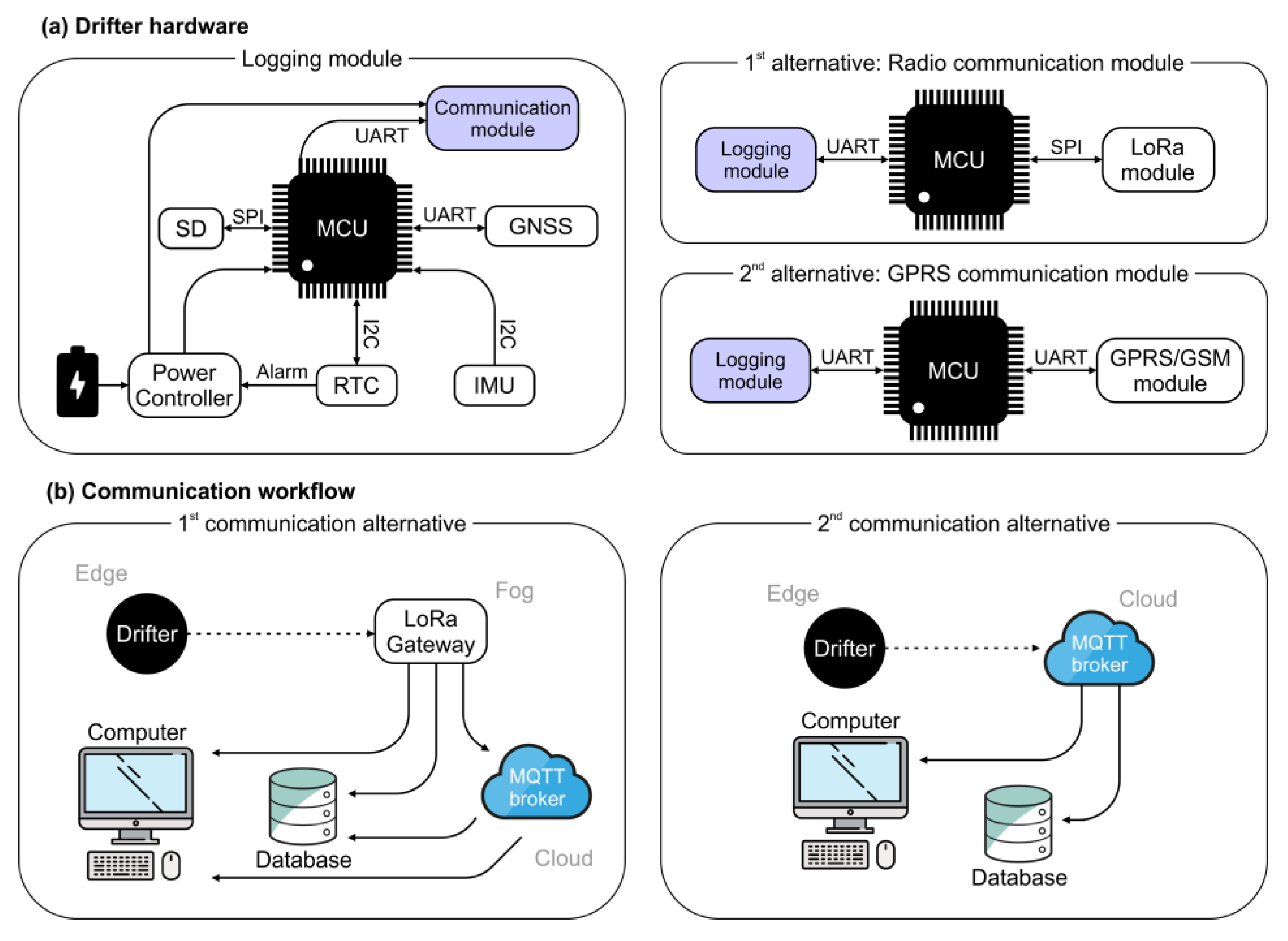
2.1. Hardware
2.1.1. Data Logging Module
2.1.2. Data Transmission Module
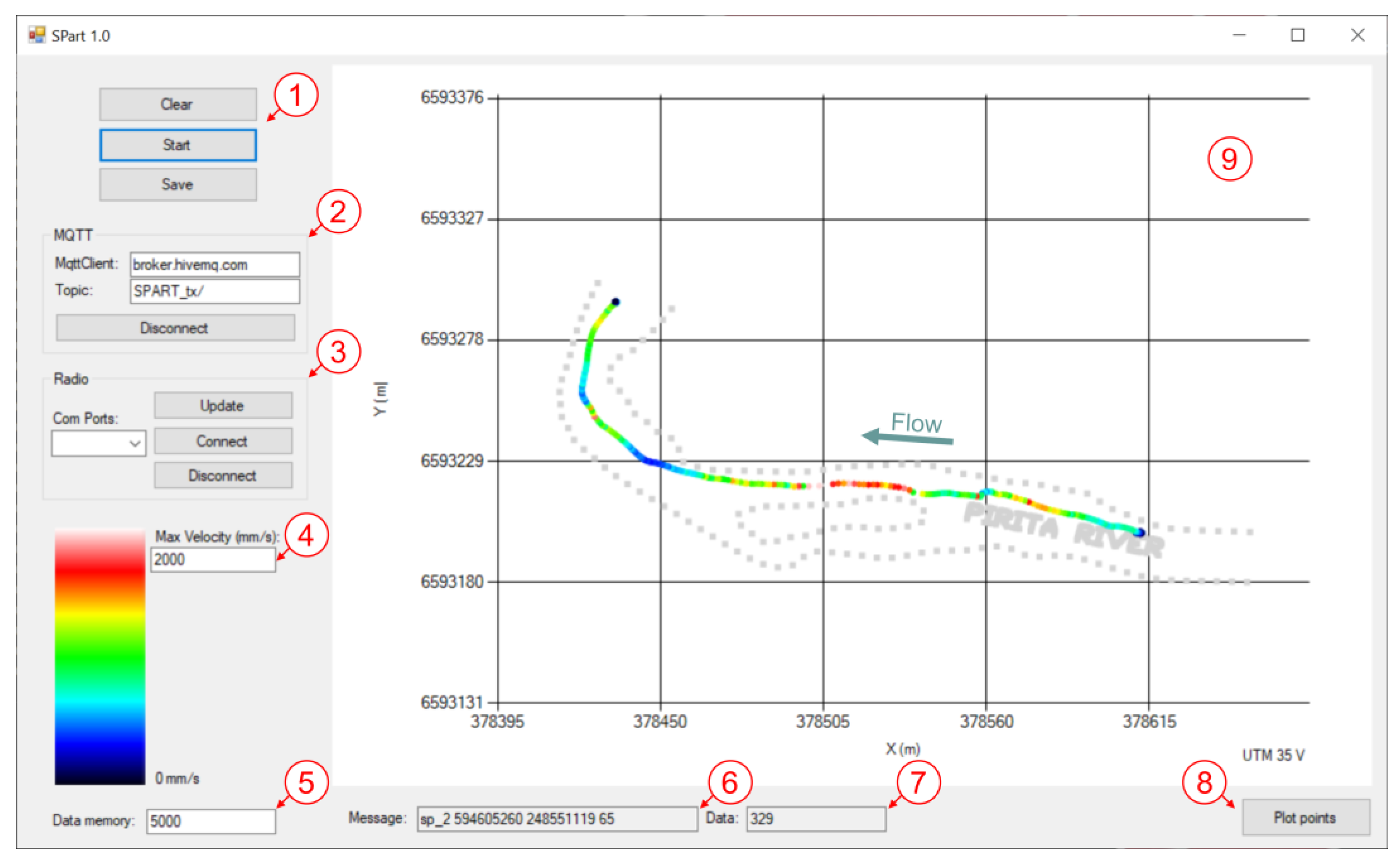
2.2. Software
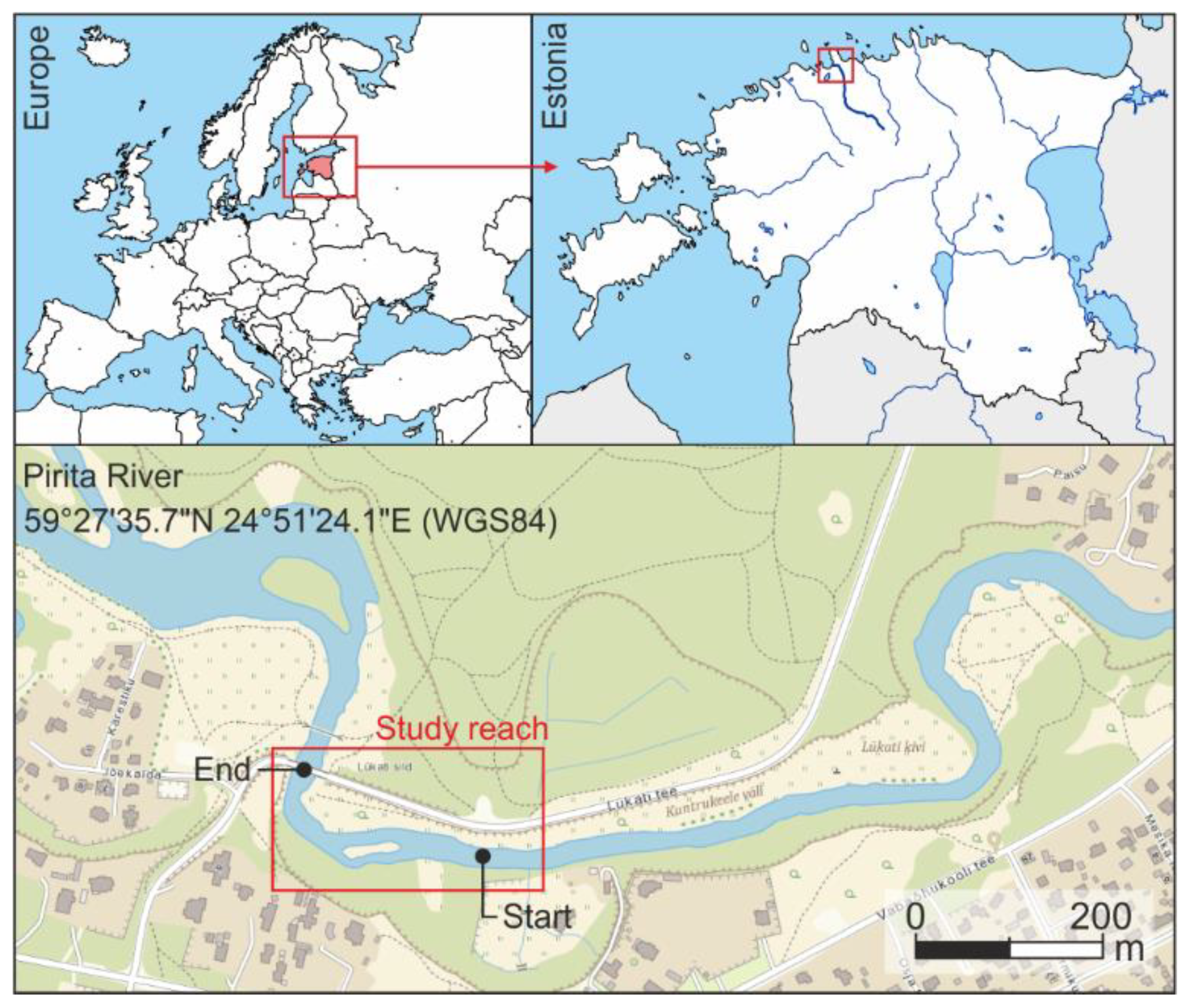
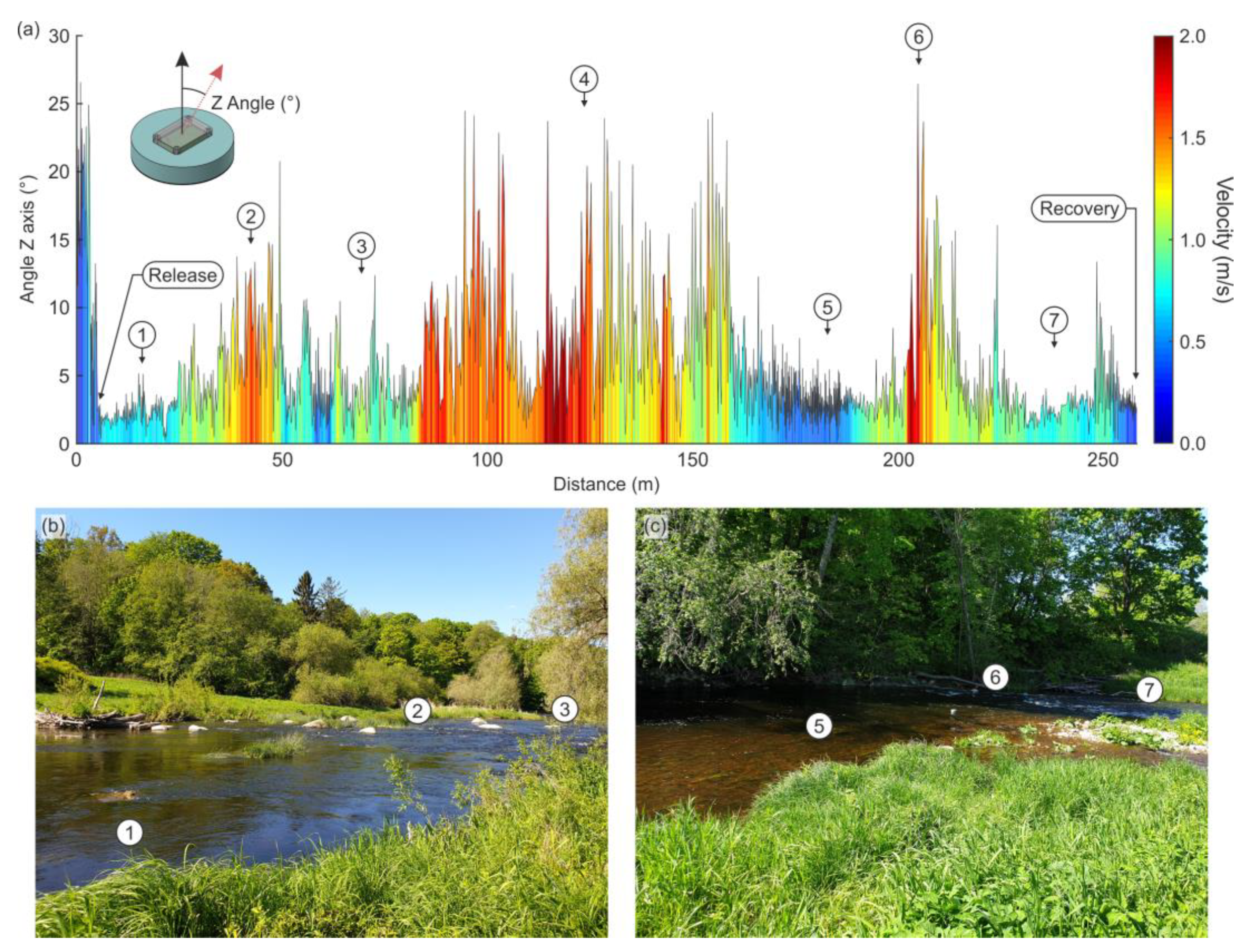
2.3. Study Case and Experimental Setup
2.4. Data Structure and Treatment
3. Results and Discussion
3.1. About the Drifter and the Open Platform
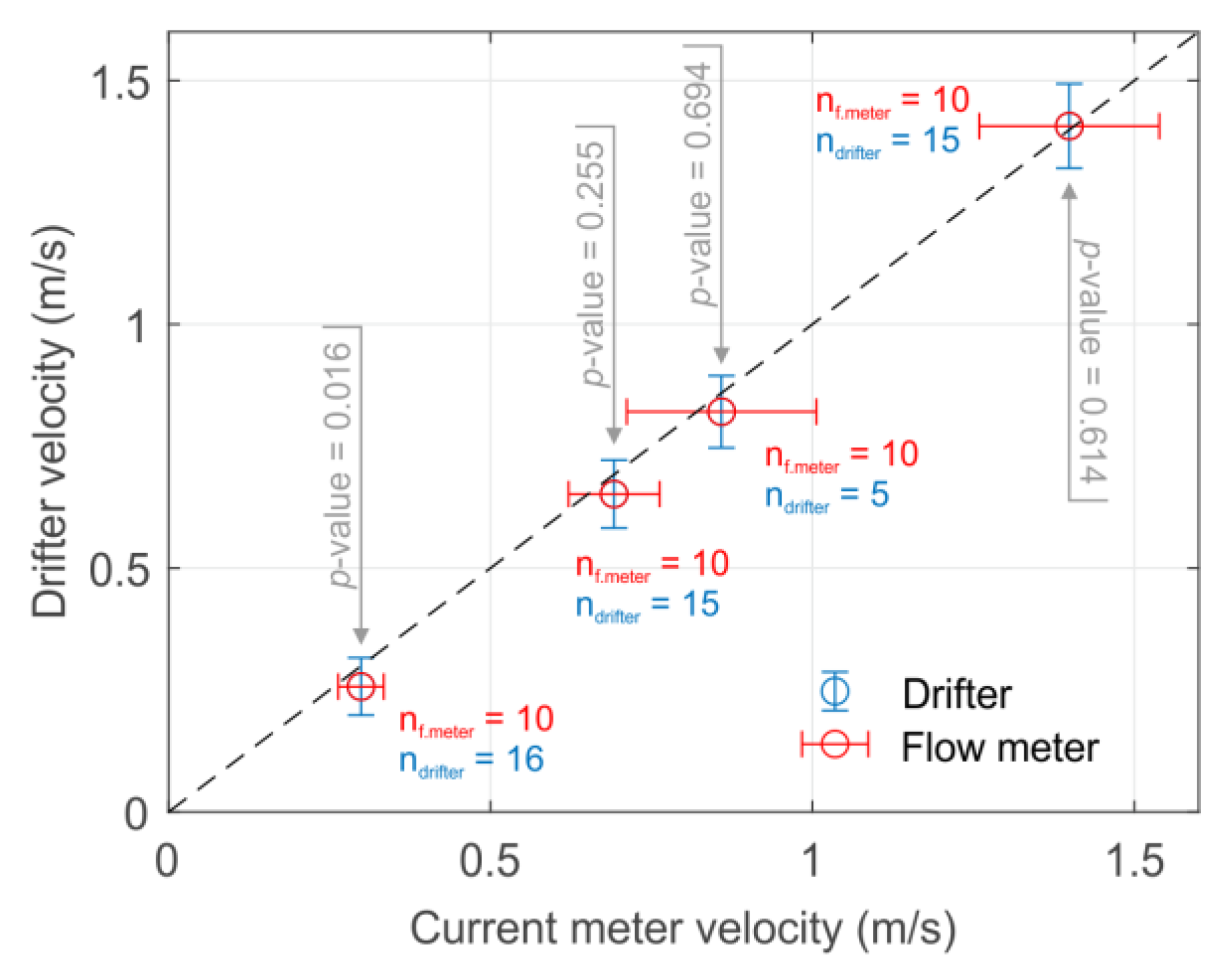
3.2. Comparison with the Propeller-Type Current Meter
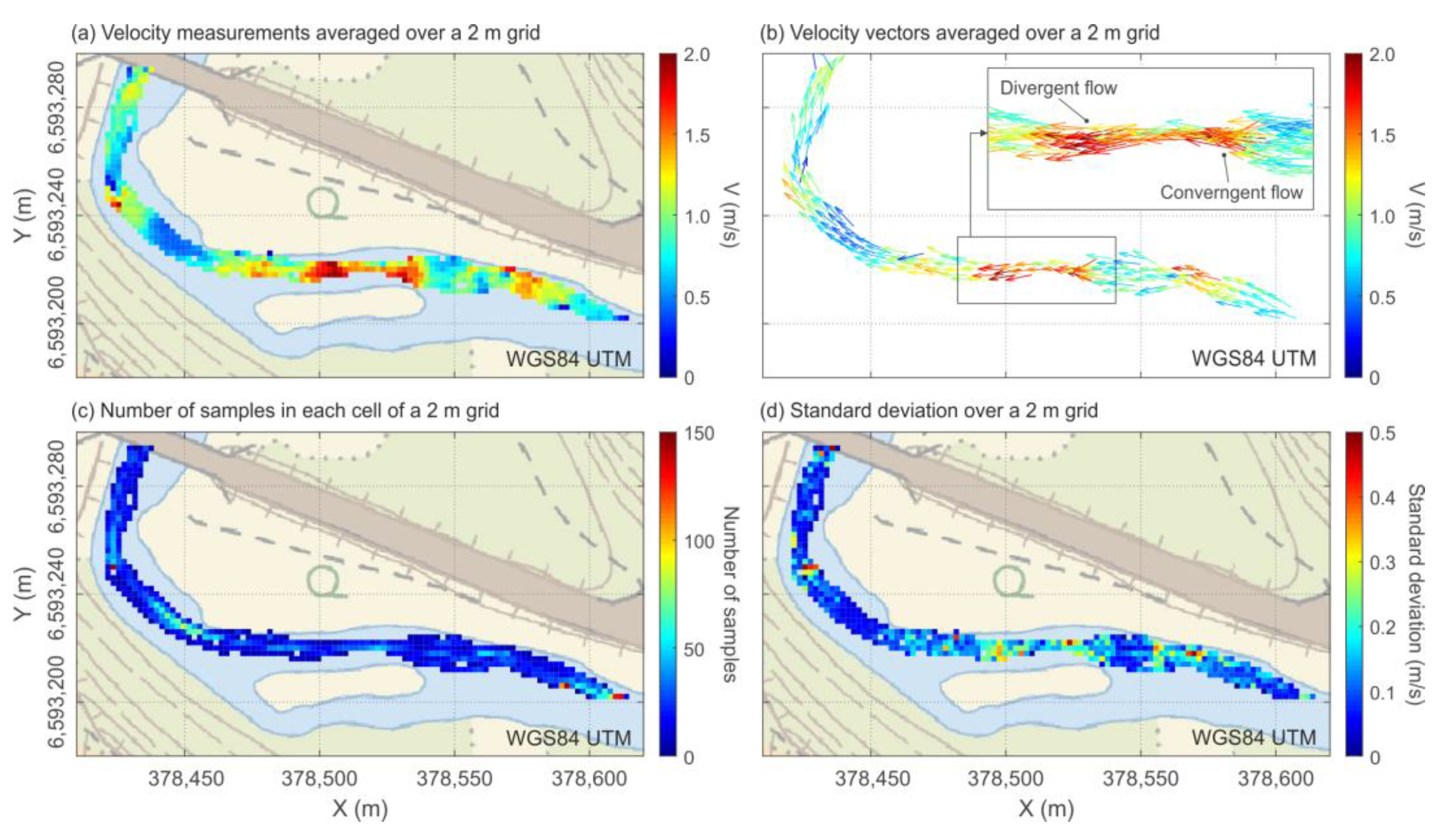
3.3. River Reach Characterization
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Kummu, M.; de Moel, H.; Ward, P.J.; Varis, O. How close do we live to water? A global analysis of population distance to freshwater bodies. PLoS ONE 2011, 6, e20578. [Google Scholar] [CrossRef]
- European Environment Agency. Rivers and Lakes in European Cities Past and Future Challenges; Publications Office of the EU: Luxembourg, 2016; ISBN 978-92-9213-821-9. [Google Scholar]
- Fuentes-Pérez, J.F. Hydraulic Modeling of Fishways under Variable Hydrodynamic Scenarios; Universidad de Valladolid: Valladolid, Spain, 2017. [Google Scholar]
- González del Tánago, M.; Martínez-Fernández, V.; García de Jalón, D. Diagnosing problems produced by flow regulation and other disturbances in Southern European Rivers: The Porma and Curueño Rivers (Duero Basin, NW Spain). Aquat. Sci. 2016, 78, 121–133. [Google Scholar] [CrossRef]
- Milly, P.C.D.; Wetherald, R.T.; Dunne, K.A.; Delworth, T.L. Increasing risk of great floods in a changing climate. Nature 2002, 415, 514–517. [Google Scholar] [CrossRef] [PubMed]
- de Andrés, C.; Centero, S. Los Sistemas Automáticos de Información Hidrológica (SAIH): El sector del Agua y la transformación digital en la Ingeniería Civil. Rev. Obras Públicas 2019, 3615, 24–29. [Google Scholar]
- BfG Bundesanstalt für Gewässerkunde. Available online: www.bafg.de (accessed on 12 December 2022).
- Keskkonnaagentuur Estonian Weather Service. Available online: www.ilmateenistus.ee (accessed on 12 December 2022).
- CEDEX. Anuario de Aforos 2015-16; Ministerio de Transportes—Movilidad y Agenda Urbana (MITMA), Ed.; Servicio de Publicaciones del CEDEX: Madrid, Spain, 2019. [Google Scholar]
- Pasternack, G.B.; Gilbert, A.T.; Wheaton, J.M.; Buckland, E.M. Error propagation for velocity and shear stress prediction using 2D models for environmental management. J. Hydrol. 2006, 328, 227–241. [Google Scholar] [CrossRef]
- Stockdale, R.J.; McLelland, S.J.; Middleton, R.; Coulthard, T.J. Measuring river velocities using GPS river flow tracers (GRiFTers). Earth Surf. Process. Landforms J. Br. Geomorphol. Res. Gr. 2008, 33, 1315–1322. [Google Scholar] [CrossRef]
- Swick, W.; MacMahan, J. The use of position-tracking drifters in riverine environments. In Proceedings of the OCEANS, Biloxi, MS, USA, 26–29 October 2009; pp. 1–10. [Google Scholar]
- Emery, L.; Smith, R.; McNeal, D.; Hughes, B.; Swick, L.W.; MacMahan, J. Autonomous collection of river parameters using drifting buoys. In Proceedings of the OCEANS, Seattle, WA, USA, 20–23 September 2010; pp. 1–7. [Google Scholar]
- Tinka, A.; Wu, Q.; Weekly, K.; Oroza, C.A.; Beard, J.; Bayen, A.M. Heterogeneous fleets of active and passive floating sensors for river studies. J. F. Robot. 2016, 33, 618–638. [Google Scholar] [CrossRef]
- Barker, J.R.; Pasternack, G.B.; Bratovich, P.M.; Massa, D.A.; Wyrick, J.R.; Johnson, T.R. Kayak drifter surface velocity observation for 2D hydraulic model validation. River Res. Appl. 2018, 34, 124–134. [Google Scholar] [CrossRef]
- Noss, C.; Koca, K.; Zinke, P.; Henry, P.-Y.; Navaratnam, C.U.; Aberle, J.; Lorke, A. A Lagrangian drifter for surveys of water surface roughness in streams. J. Hydraul. Res. 2020, 58, 471–488. [Google Scholar] [CrossRef]
- Lumpkin, R.; Özgökmen, T.; Centurioni, L. Advances in the Application of Surface Drifters. Ann. Rev. Mar. Sci. 2016, 9, 59–81. [Google Scholar] [CrossRef]
- Intergovernmental Oceanographic Commission. Guide to Drifting Data Buoys; Unesco: Geneva, Switzerland, 1988. [Google Scholar]
- Olson, D.B.; Kourafalou, V.H.; Johns, W.E.; Samuels, G.; Veneziani, M. Aegean surface circulation from a satellite-tracked drifter array. J. Phys. Oceanogr. 2007, 37, 1898–1917. [Google Scholar] [CrossRef]
- Centurioni, L.; Horányi, A.; Cardinali, C.; Charpentier, E.; Lumpkin, R. A global ocean observing system for measuring sea level atmospheric pressure : Effects and impacts on numerical weather prediction. Bull. Am. Meteorol. Soc. 2017, 98, 231–238. [Google Scholar] [CrossRef]
- Meyerjürgens, J.; Badewien, T.H.; Garaba, S.P.; Wolff, J.-O.; Zielinski, O. A state-of-the-art compact surface drifter reveals pathways of floating marine litter in the German Bight. Front. Mar. Sci. 2019, 6, 58. [Google Scholar] [CrossRef]
- Maximenko, N.; Hafner, J.; Niiler, P. Pathways of marine debris derived from trajectories of Lagrangian drifters. Mar. Pollut. Bull. 2012, 65, 51–62. [Google Scholar] [CrossRef]
- Hut, R.; Win, T.T.N.; Bogaard, T. Easy to build low-power GPS drifters with local storage and acellular modem made from off-the-shelf components. Geosci. Instrum. Methods Data Syst. 2020, 9, 435–442. [Google Scholar] [CrossRef]
- Emery, L.; Smith, R.; McNeal, D.; Hughes, B. Drifting buoy for autonomous measurement of river environment. In Proceedings of the OCEANS, Biloxi, MS, USA, 26–29 October 2009; pp. 1–8. [Google Scholar]
- Suara, K.; Wang, C.; Feng, Y.; Brown, R.J.; Chanson, H.; Borgas, M. High-resolution GNSS-tracked drifter for studying surface dispersion in shallow water. J. Atmos. Ocean. Technol. 2015, 32, 579–590. [Google Scholar] [CrossRef]
- Oroza, C.; Tinka, A.; Wright, P.K.; Bayen, A.M. Design of a network of robotic Lagrangian sensors for shallow water environments with case studies for multiple applications. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 227, 2531–2548. [Google Scholar] [CrossRef]
- Beard, J.; Weekly, K.; Oroza, C.; Tinka, A.; Bayen, A.M. Mobile phone based drifting lagrangian flow sensors. In Proceedings of the 2012 IEEE 3rd International Conference on Networked Embedded Systems for Every Application (NESEA), Liverpool, UK, 13–14 December 2012; pp. 1–7. [Google Scholar]
- Han, E.J.; Park, I.; Do Kim, Y.; Seo, I.W. A study of surface mixing in a meandering channel using GPS floaters. Environ. Earth Sci. 2016, 75, 901. [Google Scholar] [CrossRef]
- Arduino Arduino Webpage. Available online: https://www.arduino.cc/ (accessed on 25 March 2020).
- U-Blox. Product Summary U-Blox M8 Concurrent GNSS Module—UBX-15025193—R03, 3rd ed.; U-blox: Thalwil, Switzerland, 2015. [Google Scholar]
- Adafruit Industries Adafruit BNO055 Absolute Orientation Sensor. Adafruit Industries. Available online: https://learn.adafruit.com/adafruit-bno055-absolute-orientation-sensor (accessed on 25 February 2020).
- Adafruit Industries Adafruit DS3231 Precision RTC Breakout. Available online: https://learn.adafruit.com/adafruit-ds3231-precision-rtc-breakout (accessed on 25 February 2020).
- Pololu Mini Pushbutton Power Switch. Available online: https://www.pololu.com/product/2808 (accessed on 25 February 2020).
- SparkFun MicroSD Breakout. Available online: https://learn.sparkfun.com/tutorials/microsd-breakout-with-level-shifter-hookup-guide?_ga=2.185169578.2073379610.1670854842-447162298.1670854842 (accessed on 12 December 2022).
- Last Minute Engineers SIM800L GSM Module. Available online: https://lastminuteengineers.com/sim800l-gsm-module-arduino-tutorial/ (accessed on 12 December 2022).
- Alexander, A.; Kruusmaa, M.; Tuhtan, J.A.; Hodson, A.J.; Schuler, T.V.; Kääb, A. Pressure and inertia sensing drifters for glacial hydrology flow path measurements. Cryosphere 2020, 14, 1009–1023. [Google Scholar] [CrossRef]
- Tominaga, A.; Nezu, I.; Ezaki, K.; Nakagawa, H. Three-dimensional turbulent structure in straight open channel flows. J. Hydraul. Res. 1989, 27, 149–173. [Google Scholar] [CrossRef]
- García-Vega, A.; Fuentes-Pérez, J.F.; Fukuda, S.; Kruusmaa, M.; Sanz-Ronda, F.J.; Tuhtan, J.A. Artificial lateral line for aquatic habitat modelling: An example for Lefua echigonia. Ecol. Inform. 2021, 65, 101388. [Google Scholar]
- BlueRobotics Ping Sonar from BlueRobotics. Available online: https://bluerobotics.com/store/sensors-sonars-cameras/sonar/ping-sonar-r2-rp/ (accessed on 12 December 2022).
- Alexander, A.; Tuhtan, J.A.; Kruusmaa, M.; Schuler, T.V.; Kääb, A. Water acceleration in a supraglacial channel predicts locations of step-pool sequence formation. EarthArXiv 2021. [Google Scholar] [CrossRef]
- Sanz-Ronda, F.J.; Bravo-Córdoba, F.J.; García-Vega, A.; Valbuena-Castro, J.; Martínez-de-Azagra, A.; Fuentes-Pérez, J.F. Fish Upstream Passage through Gauging Stations: Experiences with Iberian Barbel in Flat-V Weirs. Fishes 2021, 6, 81. [Google Scholar] [CrossRef]
- Valbuena-Castro, J.; Fuentes-Pérez, J.F.; García-Vega, A.; Bravo-Córdoba, F.J.; Ruiz-Legazpi, J.; Martínez de Azagra-Paredes, A.; Sanz-Ronda, F.J. Coarse fishway assessment to prioritize retrofitting efforts: A case study in the Duero River basin. Ecol. Eng. 2020, 155, 105946. [Google Scholar] [CrossRef]







| Column | Variables | Units | |
|---|---|---|---|
| Microcontroller | |||
| 1 | Time | ms | |
| GNSS | |||
| 2 | Time | ms | |
| 3 | UTC Time | ms | |
| 4 | Nano UTC time | ns | |
| 5 | Latitude (WGS84) | 10−7 degrees | |
| 6 | Longitude (WGS84) | 10−7 degrees | |
| 7 | Height above ellipsoid | mm | |
| 8 | Horizontal accuracy | mm | |
| 9 | Ground speed | mm/s | |
| 10 | NED north velocity | mm/s | |
| 11 | NED east velocity | mm/s | |
| 12 | NED down velocity | mm/s | |
| 13 | Number of satellites | - | |
| 14 | Heading | 10−5 degrees | |
| IMU | |||
| 15 | Quaternions | w | - |
| 16 | y | - | |
| 17 | x | - | |
| 18 | z | - | |
| 19 | Acceleration | x | m/s2 |
| 20 | y | m/s2 | |
| 21 | z | m/s2 | |
| 22 | Magnetic field | x | µT |
| 23 | y | µT | |
| 24 | z | µT | |
| 25 | Gyroscope | x | rad/s |
| 26 | y | rad/s | |
| 27 | z | rad/s | |
| 28 | Calibration of gyroscope | - | |
| 29 | Calibration of accelerometer | - | |
| 30 | Calibration of magnetometer | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fuentes-Pérez, J.F.; Sanz-Ronda, F.J.; Tuhtan, J.A. An Open Surface Drifter for River Flow Field Characterization. Sensors 2022, 22, 9918. https://doi.org/10.3390/s22249918
Fuentes-Pérez JF, Sanz-Ronda FJ, Tuhtan JA. An Open Surface Drifter for River Flow Field Characterization. Sensors. 2022; 22(24):9918. https://doi.org/10.3390/s22249918
Chicago/Turabian StyleFuentes-Pérez, Juan Francisco, Francisco Javier Sanz-Ronda, and Jeffrey A. Tuhtan. 2022. "An Open Surface Drifter for River Flow Field Characterization" Sensors 22, no. 24: 9918. https://doi.org/10.3390/s22249918
APA StyleFuentes-Pérez, J. F., Sanz-Ronda, F. J., & Tuhtan, J. A. (2022). An Open Surface Drifter for River Flow Field Characterization. Sensors, 22(24), 9918. https://doi.org/10.3390/s22249918