The Effect of Light Source Line Width on the Spectrum Resolution of Dual-Frequency Coherent Detection Signals

Abstract
:1. Introduction
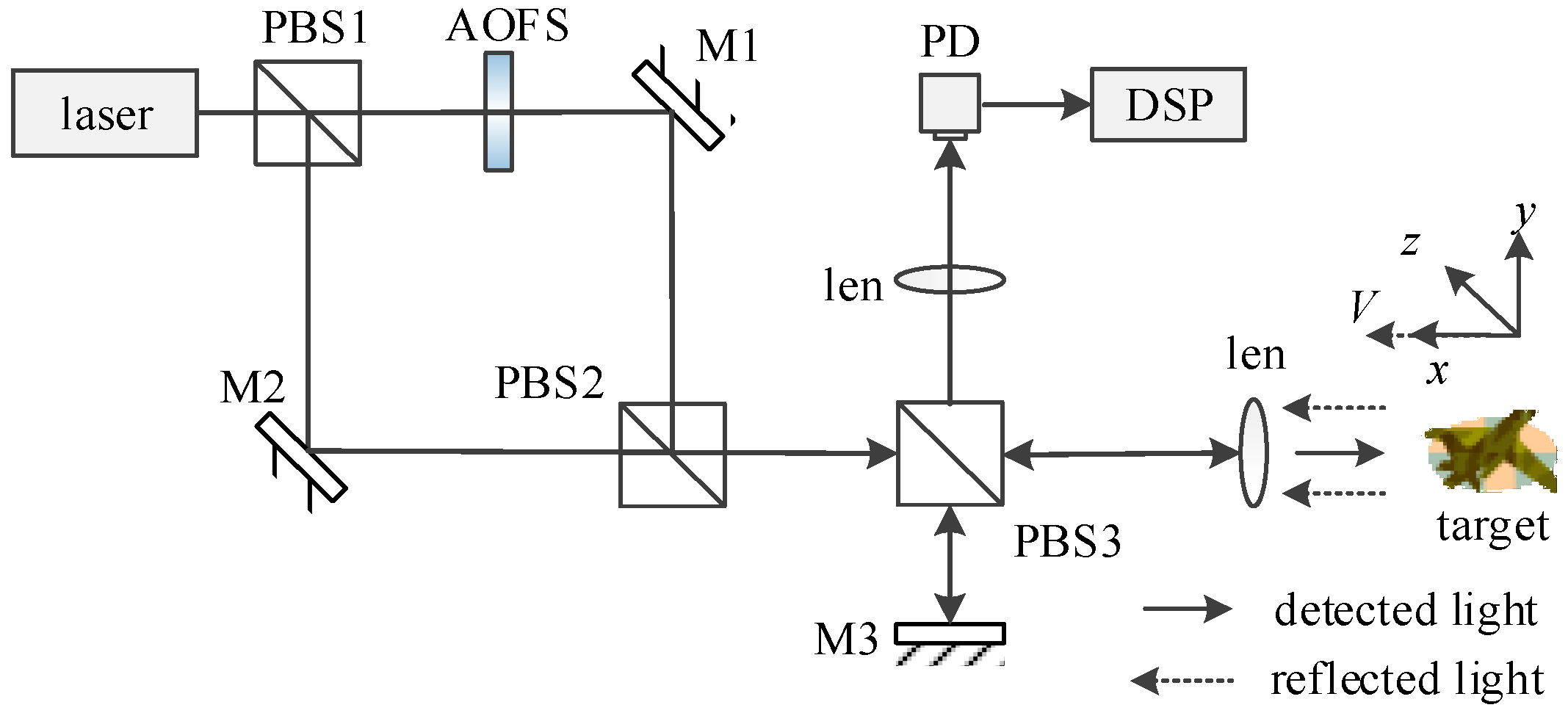
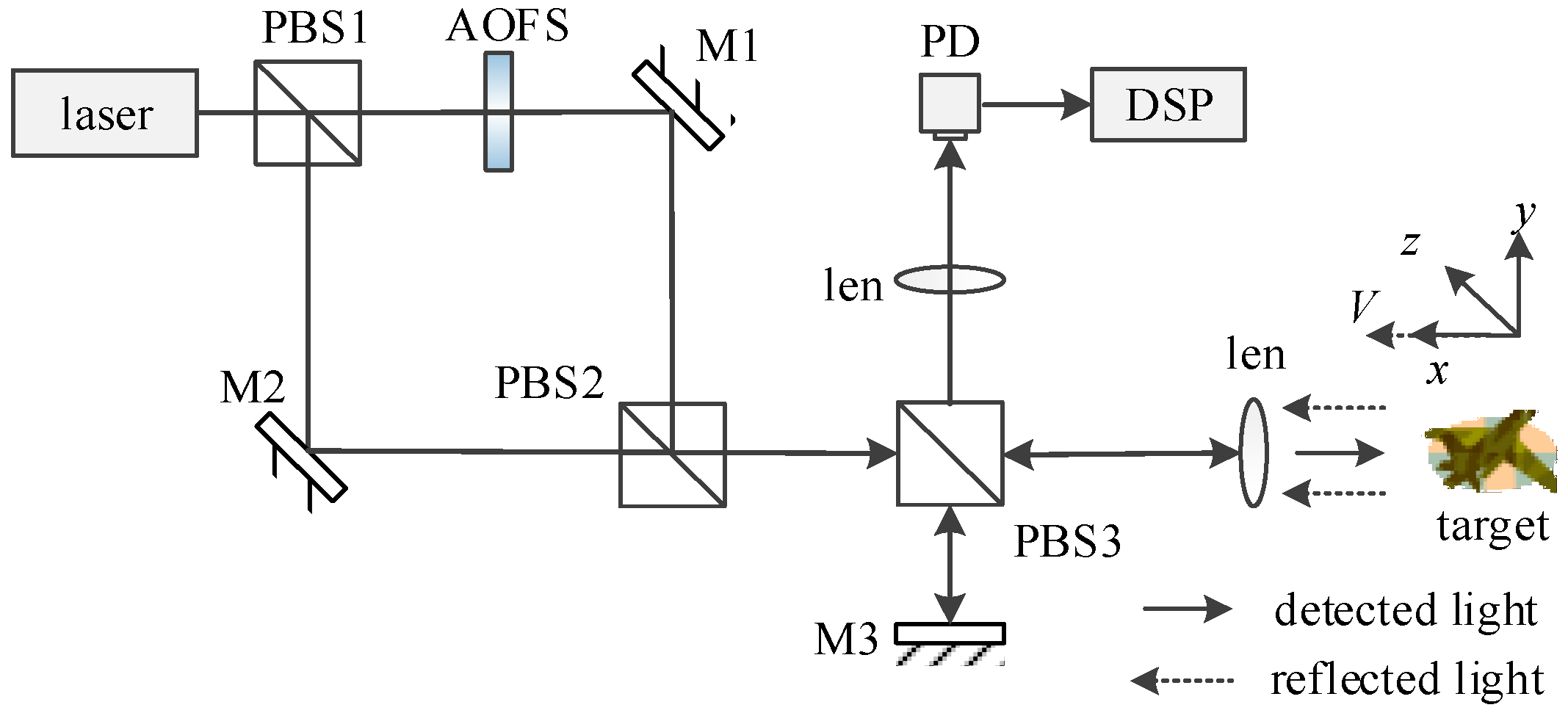
2. Theoretical Analysis of Four-Light Coherent Mixing Technology
3. Coherent Mixing Signal Power Spectrum Analysis
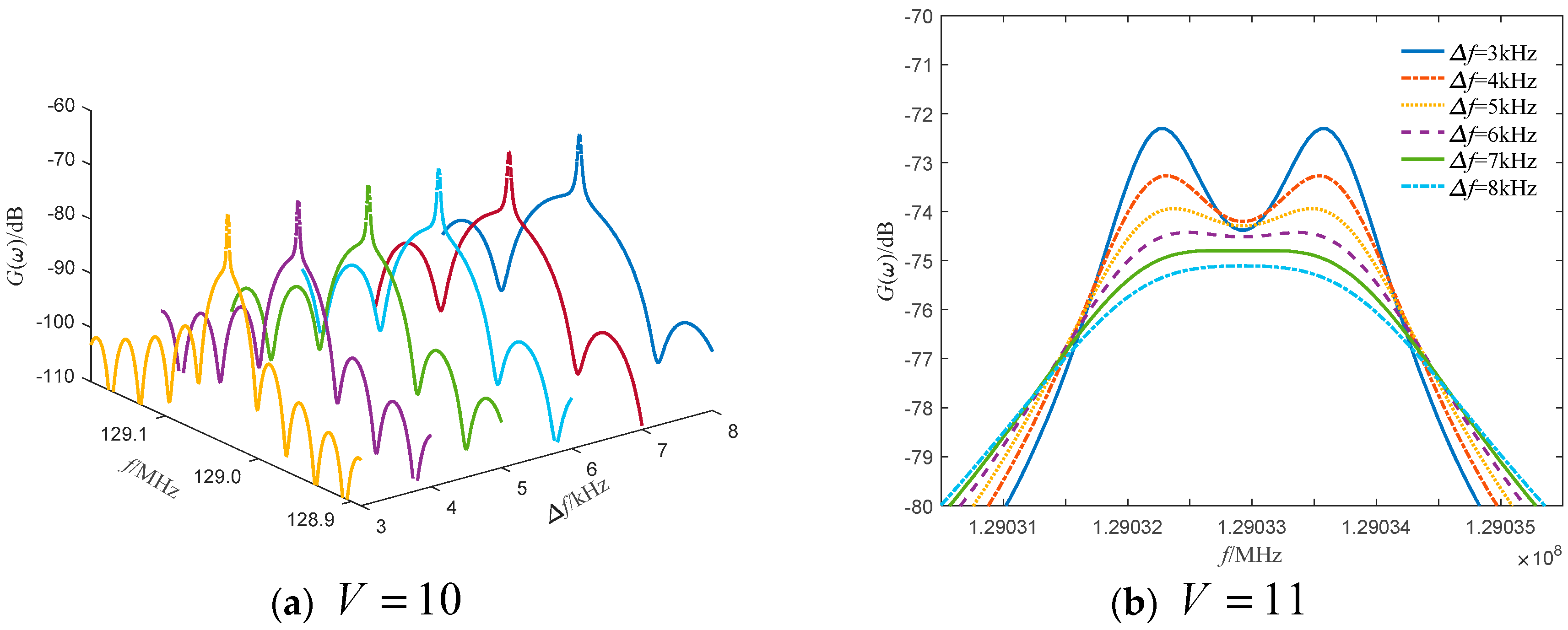
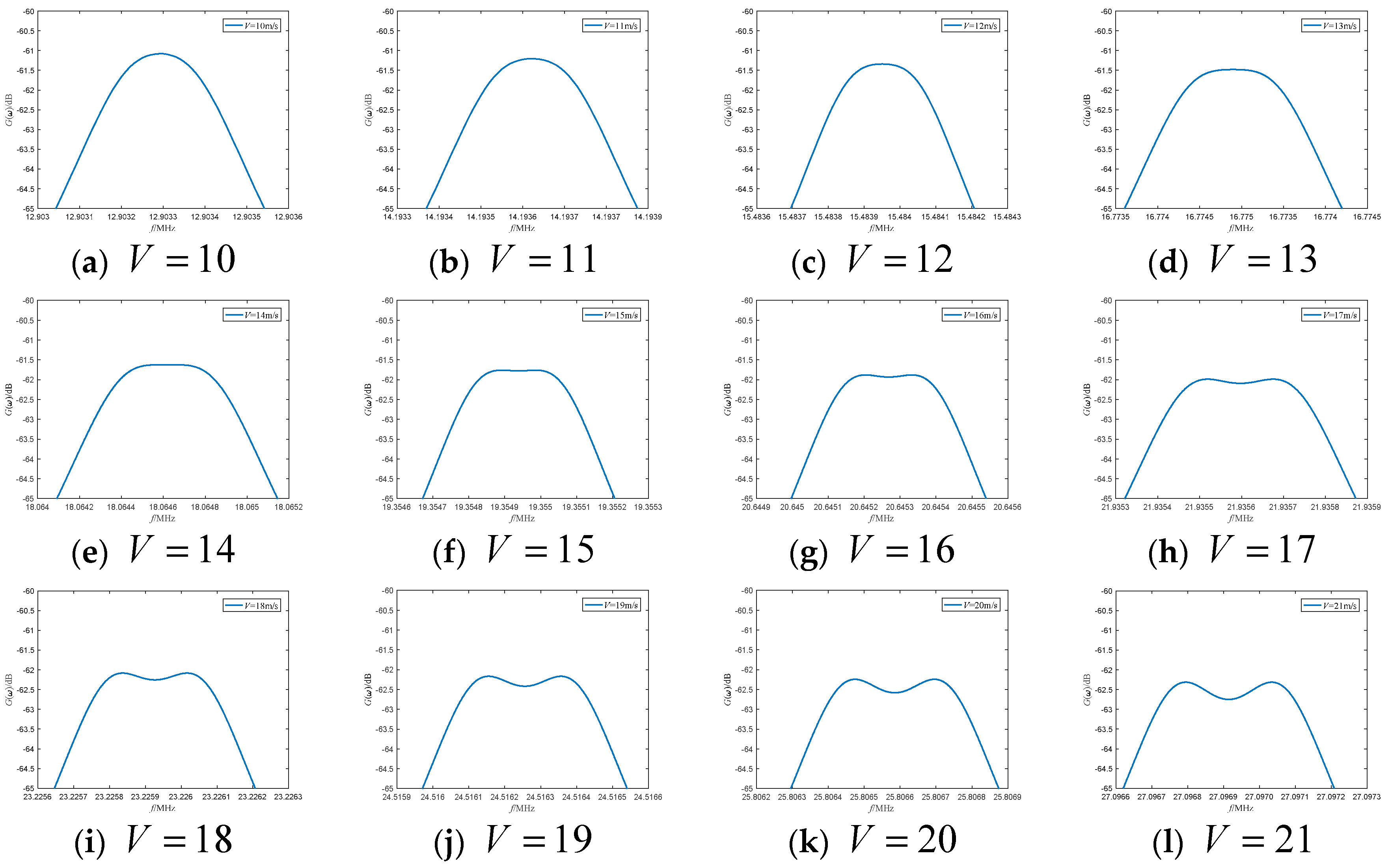
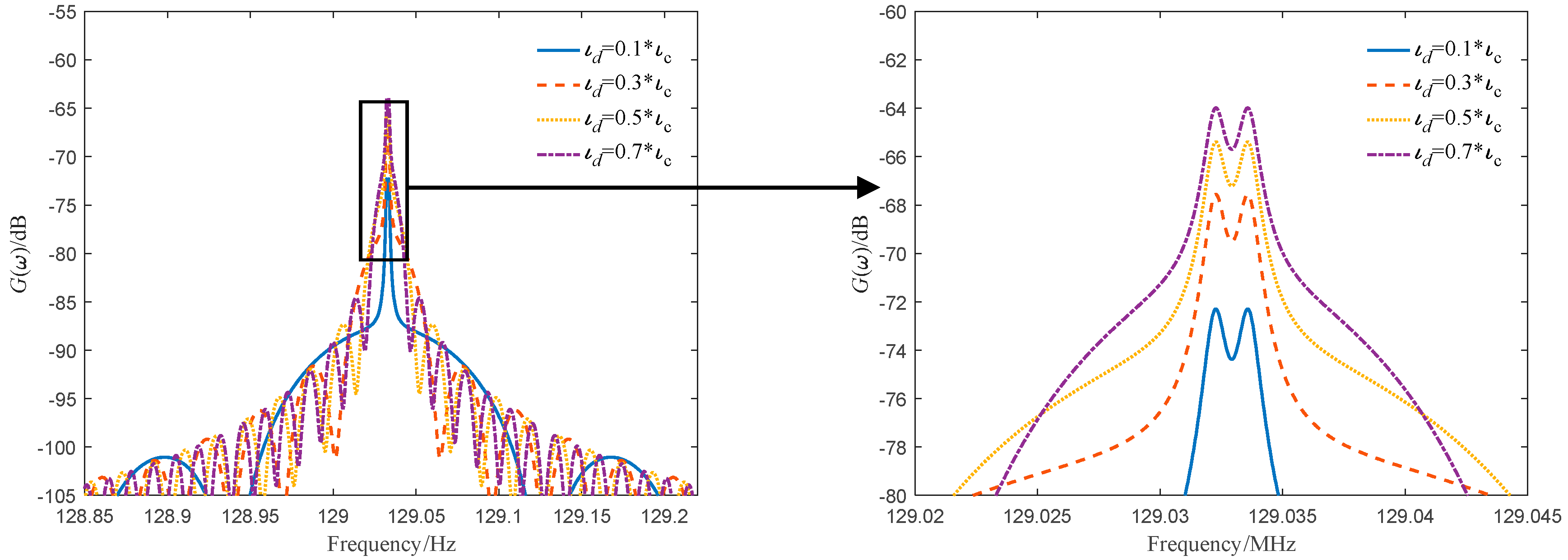
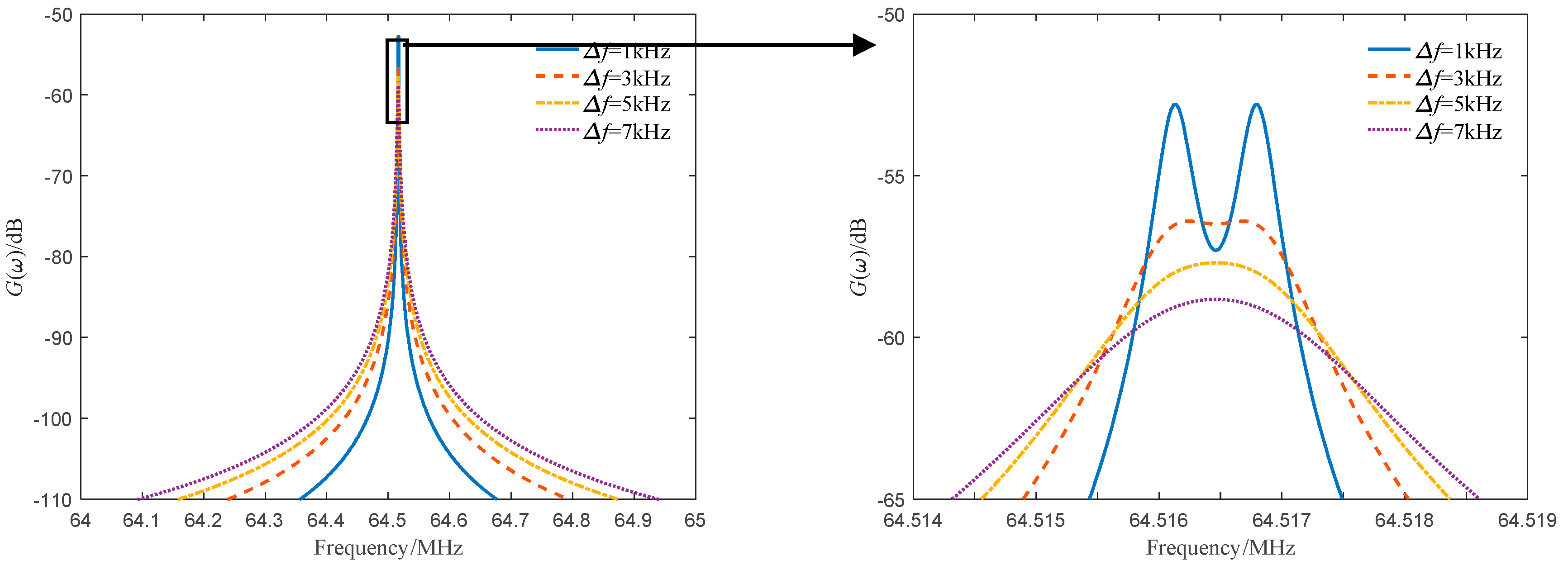
4. Numerical Analysis
4.1. Delay Time is Less than Coherence Time
4.2. Delay Time is Larger than Coherence Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Peng, S.P.; Chen, T.; Yu, H.J.; Zhao, S.; Zhang, H.Y. Doppler frequency spectral discrimination of moving target based on coherent detection. Chin. J. Lasers 2013, 40, 1208008. [Google Scholar] [CrossRef]
- Li, D.J.; Hu, X. Optical system and detection range analysis of synthetic aperture ladar. J. Radars 2018, 7, 263–274. [Google Scholar]
- Cheng, C.-H.; Lin, L.-C.; Lin, F.-Y. Self-mixing dual-frequency laser Doppler velocimeter. Opt. Express 2014, 22, 3600–3610. [Google Scholar] [CrossRef] [PubMed]
- Scalise, L.; Paone, N. Self-mixing laser Doppler vibrometer. In Proceedings of the SPIE in Fourth International Conference on Vibration Measurements by Laser Techniques: Advances and Applications, Ancona, Italy, 21–23 June 2000. [Google Scholar]
- Zhang, J.H.; Yang, D.Z.; Gao, J.; Liu, X.-M. Effect of time-frequency disturbance on performance of Dual-frequency laser coherent detection system. Laser Optoelectron. Prog. 2016, 61403. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Huo, Y.J.; He, S.F.; Gong, K. A new dual-frequency laser doppler velocity measurement method. Laser Optoelectron. Prog. 2010, 40, 694–696. [Google Scholar]
- Zhang, J.; Wang, M. Status and trend analysis of radar detection technology of hypersonic targets in near space. Electron. Sci. Technol. 2016, 3, 706–709. [Google Scholar]
- Onori, D.; Scotti, F.; Scaffardi, M.; Bogoni, A.; Laghezza, F. Coherent Interferometric Dual-Frequency Laser Radar for Precise Range/Doppler Measurement. J. Lightwave Technol. 2016, 20, 4828–4834. [Google Scholar] [CrossRef]
- Onori, D.; Scotti, F.; Laghezza, F.; Scaffardi, M.; Bogoni, A. Coherent Laser Radar with Dual-Frequency Doppler Estimation and Interferometric Range Detection. In Proceedings of the IEEE Radar Conference, Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar]
- Cheng, C.H.; Lee, C.W.; Lin, T.W.; Lin, F.Y. Dual-frequency laser Doppler velocimeter for speckle noise reduction and coherence enhancement. Opt. Express 2012, 20, 20255–20265. [Google Scholar] [CrossRef] [PubMed]
- Scotti, F.; Onori, D.; Scaffardi, M. Multi-Frequency Lidar Integrated System for Robust and flexible Doppler Measurements. IEEE Photonics Technol. Lett. 2015, 27, 2268–2271. [Google Scholar] [CrossRef]
- Shan, H.J.; Yang, H.Z.; Yang, S.H.; Zhao, C.M.; Zhang, H.Y. Effects of laser intensity fluctuation and phase niose on dual-frequency laser detection. Acta Opt. Sin. 2016, 36, 1212005. [Google Scholar]
- Li, C.Q.; Wang, T.F.; Zhang, H.Y.; Xie, J.J.; Liu, L.S.; Guo, J. Effect of laser linewidth on the performance of heterodyne detection. Acta Phys. Sin. 2016, 65, 84206. [Google Scholar]
- Gallion, P.B.; Debarge, G. Quantum phase noise and field correlation in single frequency semiconductor laser systems. IEEE J. Quantum Electron. 1984, 20, 343–349. [Google Scholar] [CrossRef]
- An, Y.; Du, Z.; Xu, K. The instantaneous linewidth measurement of DFB laser with ultrashort delay. Acta Phys. Sin. 2013, 62, 174208. [Google Scholar]
- Gallion, P.; Mendieta, F.J.; Chabran, C. Single Mode Laser Spectral Spread Repercussion in Single-Mode Optical Fiber Coherent Detection Systems. SPIE 1983, 369, 527–531. [Google Scholar]
- Salehi, M.R.; Cabon, B. Theoretical and Experimental Analysis of Influence of Phase-to-Intensity Noise Conversion in Interferometric Systems. J. Lightwave Technol. 2004, 22, 1510–1518. [Google Scholar] [CrossRef]
- Yan, C.H.; Wang, T.F.; Zhang, H.Y.; Lv, T.; Wu, S.S. Short-range optical limited displacement resolution in laser heterodyne detection system. Acta Phys. Sin. 2017, 23, 234208. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Width/kHz | 2 GHz | 3 GHz | 4 GHz | |||
|---|---|---|---|---|---|---|
| Theoretical Doppler Frequency Difference/kHz | Calculated Doppler Frequency Difference/kHz | Theoretical Doppler Frequency Difference/kHz | Calculated Doppler Frequency Difference/kHz | Theoretical Doppler Frequency Difference/kHz | Calculated Doppler Frequency Difference/kHz | |
| 1 | 1.333 | 1.333 | 2 | 2 | 2.667 | 2.667 |
| 2 | 1.333 | 1.325 | 2 | 1.998 | 2.667 | 2.665 |
| 3 | 1.333 | 1.298 | 2 | 1.988 | 2.667 | 2.661 |
| 4 | 1.333 | 1.232 | 2 | 1.966 | 2.667 | 2.651 |
| 5 | 1.333 | 1.107 | 2 | 1.922 | 2.667 | 2.631 |
| 6 | 1.333 | 0.887 | 2 | 1.848 | 2.667 | 2.595 |
| 7 | 1.333 | 0.426 | 2 | 1.736 | 2.667 | 2.541 |
| 8 | 1.333 | \ | 2 | 1.570 | 2.667 | 2.463 |
| 9 | 1.333 | \ | 2 | 1.330 | 2.667 | 2.357 |
| 10 | 1.333 | \ | 2 | 0.952 | 2.667 | 2.215 |
| 11 | 1.333 | \ | 2 | \ | 2.667 | 2.025 |
| 14 | 1.333 | \ | 2 | \ | 2.667 | 0.853 |
| 15 | 1.333 | \ | 2 | \ | 2.667 | \ |
| Speed m/s | 2 GHz | 3 GHz | 4 GHz | |||
|---|---|---|---|---|---|---|
| Theoretical Doppler Frequency Difference/kHz | Calculated Doppler Frequency Difference/kHz | Theoretical Doppler Frequency Difference/kHz | Calculated Doppler Frequency Difference/kHz | Theoretical Doppler Frequency Difference/kHz | Calculated Doppler Frequency Difference/kHz | |
| 6 | 0.080 | \ | 0.120 | \ | 0.160 | \ |
| 7 | 0.0933 | \ | 0.140 | \ | 0.1867 | 0.040 |
| 8 | 0.1067 | \ | 0.160 | \ | 0.2133 | 0.129 |
| 9 | 0.120 | \ | 0.180 | \ | 0.240 | 0.180 |
| 10 | 0.1334 | \ | 0.200 | 0.090 | 0.2667 | 0.220 |
| 11 | 0.1466 | \ | 0.220 | 0.140 | 0.2933 | 0.250 |
| 12 | 0.160 | \ | 0.240 | 0.180 | 0.320 | 0.290 |
| 13 | 0.1734 | \ | 0.260 | 0.211 | 0.3467 | 0.324 |
| 14 | 0.1866 | 0.089 | 0.280 | 0.240 | 0.3733 | 0.354 |
| 15 | 0.200 | 0.095 | 0.300 | 0.267 | 0.400 | 0.384 |
| 16 | 0.2134 | 0.129 | 0.320 | 0.292 | 0.4267 | 0.413 |
| 17 | 0.226 | 0.156 | 0.340 | 0.316 | 0.4533 | 0.442 |
| 18 | 0.2240 | 0.180 | 0.360 | 0.339 | 0.480 | 0.471 |
| 19 | 0.2533 | 0.201 | 0.380 | 0.362 | 0.5067 | 0.498 |
| 20 | 0.2666 | 0.222 | 0.400 | 0.384 | 0.5333 | 0.526 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, J.; Sun, H.; Zhang, L.; Zhao, Y. The Effect of Light Source Line Width on the Spectrum Resolution of Dual-Frequency Coherent Detection Signals. Sensors 2019, 19, 5264. https://doi.org/10.3390/s19235264
Ren J, Sun H, Zhang L, Zhao Y. The Effect of Light Source Line Width on the Spectrum Resolution of Dual-Frequency Coherent Detection Signals. Sensors. 2019; 19(23):5264. https://doi.org/10.3390/s19235264
Chicago/Turabian StyleRen, Jianying, Huayan Sun, Laixian Zhang, and Yanzhong Zhao. 2019. "The Effect of Light Source Line Width on the Spectrum Resolution of Dual-Frequency Coherent Detection Signals" Sensors 19, no. 23: 5264. https://doi.org/10.3390/s19235264
APA StyleRen, J., Sun, H., Zhang, L., & Zhao, Y. (2019). The Effect of Light Source Line Width on the Spectrum Resolution of Dual-Frequency Coherent Detection Signals. Sensors, 19(23), 5264. https://doi.org/10.3390/s19235264