1. Introduction
Unmanned Aerial Vehicles (UAVs), or drones, have gained much popularity in various applications [
1,
2,
3], including civilian and military applications. Undoubtedly, lower operational cost and higher human safety are the main reasons for this boost in popularity. For example, UAVs are used in several areas, including mail delivery, safety monitoring, smart cities, transport management, and even disaster management [
4]. In military application, drones are deployed for surveillance system [
5] and enemy engagement [
6]. Moreover, the importance of drone deployment has been shown recently from atmospheric applications point of view. UAVs or drones are utilized for monitoring trace tropospheric gases [
7]. As global emissions continue to be higher, it is needed a technology that could detect trace gases accurately. Thus, the utilization of UAVs is proposed to gather information about trace tropospheric gases. In [
8], small drones are deployed to get enhanced atmospheric physics measurements focusing on atmospheric sampling of thermodynamic parameters. UAV experiment for real-time monitoring of Nanjing’s air pollution is conducted in [
9], given that UAV has cheaper deployment cost than manned aircraft. Also, the feasibility of UAVs utilization for measuring turbulence of atmospheric boundary level is proposed [
10].
Recently, the deployment of multiple small UAVs as a cluster [
11,
12] or swarm to execute a variety of tasks has gained more attention as it improves on the effectiveness of the current single UAV system and has a lower cost. Operating a group of small drones rather than a single huge UAV has abundant benefits, which include a guaranteed reliable ad-hoc network, improved operational performance, extended mission coverage [
13], and reduced possibility of detection by the enemy in a reconnaissance mission. The tasks of drones are continuously growing larger and more complex despite drones’ limited computing power and energy resources. Thus, it is harder for drones to complete these resource hungry applications in a timely fashion. The problem of insufficient computing resources and energy can be addressed using a computational offloading technique [
14,
15,
16] to a nearby ground control station (GCS), which has unlimited energy and powerful computational power. Alternatively, offloading could be done to neighboring drones that have sufficient resources to process the given task. However, when too many drones offload their workloads to a single GCS, there will be a bottleneck in the GCS, resulting in a longer response time for application execution. Intuitively, the problem can be resolved by providing more powerful GCSs around the drones’ operating site. However, drones services are often required in remote areas, which lack in network infrastructures. In addition, in a disaster area where the communication network has collapsed or in a military operation area, it is very difficult to deploy more powerful GCSs. Therefore, to address the problem from another perspective, assuming that there will be many more deployments of clusters of drones in the near future, we propose an offloading mechanism that is not only done between drones and a GCS, but one that can be done between different clusters of drones. A UAV cluster that requires higher computing power may borrow its neighboring cluster’s idle resources for executing its own task.
In this paper, we consider the feasibility of applying a computation offloading technique to an inter-cluster of drones. More specifically, we propose an opportunistic computation offloading scheme with a learning-based prediction module between drone clusters. First, the head of the cluster will identify the presence of other drone clusters nearby and it will then communicate whether those clusters have idle computing resources. After that, the cluster head will estimate or predict the response time of processing the workloads locally and compare it with that of offloading workloads to the other clusters. The offloading decision will be made by considering some input parameters, which include available computing power, application input size, computing power required to complete the application, and the communication bandwidth of the wireless network. Furthermore, response time estimation is made by adopting a machine learning technique to improve the accuracy of the decision engine. From the estimated result, the cluster head will make the decision of whether to complete the tasks locally or to offload them to the other cluster. If the estimated response time of the offloading scheme is faster than that of the local response time, then offloading mechanism will be triggered; otherwise, the application will be executed locally inside the cluster.
The contributions of this study are threefold:
We design an opportunistic computation offloading scheme between clusters of drones with the aim of reducing response time. The cluster head will decide whether to use the proposed offloading scheme based on the decision engine prediction module output.
We design and build a shallow neural network-based response time prediction module to give a better prediction accuracy when compared to the heuristic algorithm.
We build a NetworkSimulator-3 (NS-3)-based UAV network simulation system for evaluating the drone wireless communication scheme with a mobility scenario.
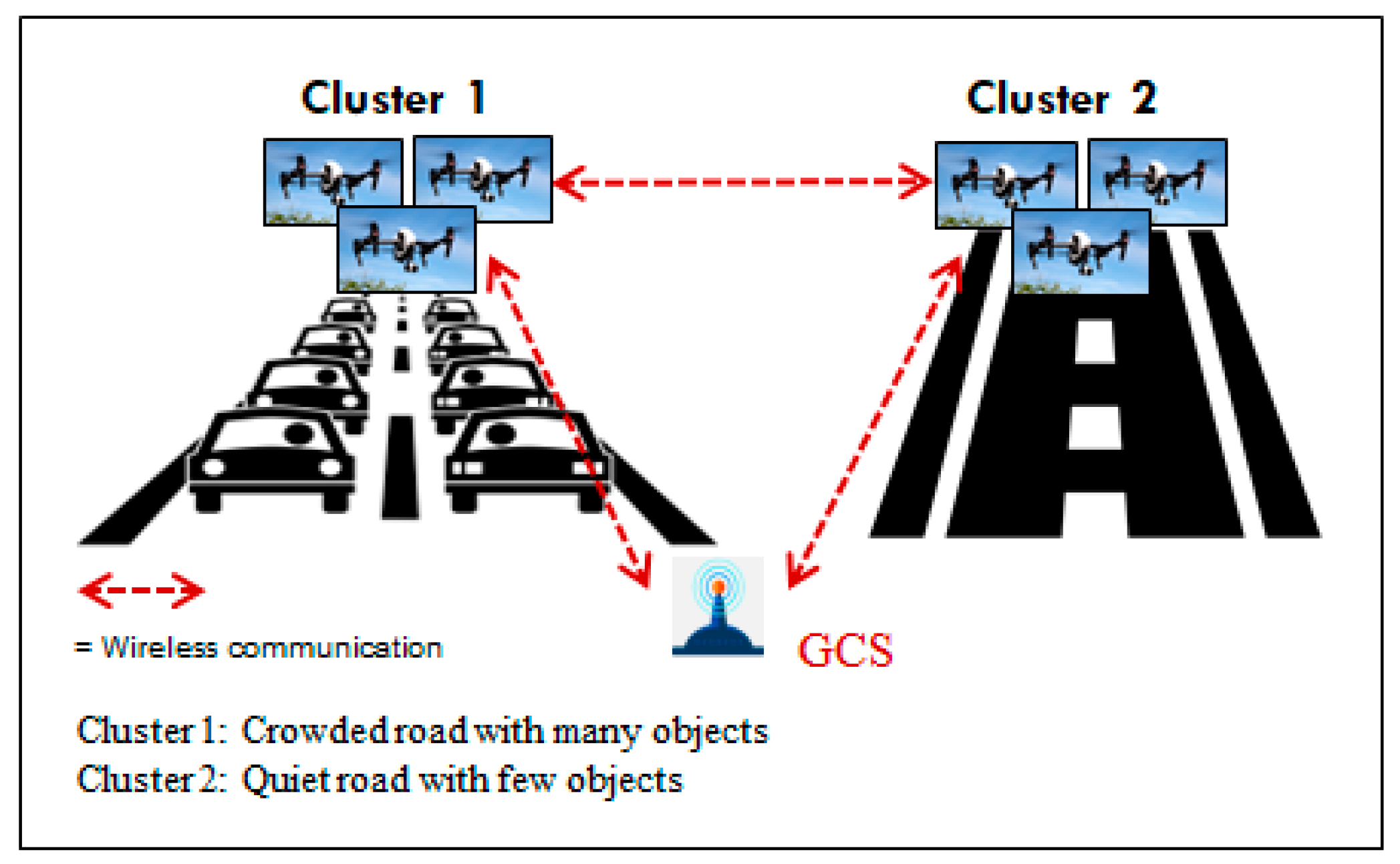
Figure 1 shows the scenario of UAV clusters have identical services but different environmental conditions. Say that two different clusters of UAVs make up a surveillance system over two different coverage areas with the similar workload size. One cluster works in a harsher environment (e.g., highly populated road) with many noise objects; the other cluster operates in a convenient environment (e.g., quiet road) nearby. Due to different environmental conditions, the first cluster will have relatively more work and require more time to complete its tasks. The other cluster will finish its task easily without additional burdens. When considering such a situation, the cluster that is deployed in the quiet road will complete its work first. Thus, it will have available computing power and resources that can be borrowed by the other UAV cluster. In other words, the first cluster has a chance to utilize this opportunity to offload some parts of its tasks to the other UAV cluster. Furthermore, since more clusters of drones will be deployed in various application services, the proposed scheme can also be utilized between clusters of drones with different services. For example, this scenario can happen when mail delivery drones fly close enough to a surveillance drone cluster. The surveillance drones may take advantage of this opportunity to get more computing resources to help them finish their work by sending an offloading request. After receiving a reply message, the surveillance drone cluster head may decide whether to conduct the offloading scheme. This scenario may be also adopted by other drone service scenarios.
The remainder of this paper is structured as follows. We summarize the motivation of this work and related work in
Section 2. Next, we present our opportunistic computational offloading scheme in
Section 3. Then, we show the simulation results in
Section 4. Finally, we conclude this work in
Section 5.
2. Related Works
The concept of computational offloading has been studied for many years. In [
17], Loke investigated the possibility of handing off computing tasks to other devices via communication interfaces. In [
18], Kovachev et al. proposed an adaptive computation offloading middleware for mobile devices to offload their computation tasks to a cloud server. The results show that the local execution time can be reduced significantly through computation offloading. Deep reinforcement learning-based computation offloading and resource allocations for mobile edge computing (MEC) has recently also been studied in [
19]. By adopting a machine learning technique, Li et al. [
19] aim to optimize the offloading decision and computational resource allocation for multiple user equipments (UEs) that are trying to access the offloading service of a MEC server. However, when compared to mobile devices, drones have a more dynamic environment, which makes it harder to predict the response time of drones.
Offloading schemes for UAV systems have been developed recently. In [
20], Jung et al. designed a computation offloading system in surveillance drone to a GCS. Adaptive Computation Offloading for Drone Surveillance System (ACODS) architecture is proposed in this work. By considering computational cost, I/O cost, and networking cost, the ACODS system compares the delay that is required to complete UAV jobs between being processed in UAV itself or in GCS. Then, the ACODS system will adaptively determine whether to conduct an offloading scheme based on the decision engine result. Ouahouah et al. in [
21] proposed a computation offloading scheme among UAVs that conducts internet of things (IoT) tasks. The offloading scheme is done among UAVs. The goals are to enhance the UAVs’ lifetimes and reduce their response times; the solutions are modeled using linear integer programming. Motlagh et al. [
22] proposed the offloading of a UAV-based IoT platform’s workload to an MEC node in a crowd surveillance use case. The goal is to reduce the processing time of recognition and detection. A mobility-aware computation offloading decision scheme is proposed in [
23]. Based on the mobility information of the moving target object and network conditions, it will offload some computation task that is related to the recognizing and tracking of a moving object to a remote control center. Computation offloading in UAV network was also studied in [
24]. Messous et al. [
24] addressed the computation offloading decision making problem in order to accomplish intensive computational tasks by adopting a sequential game approach. However, neither of these works address the problem of utilizing an offloading technique between clusters of drones. Moreover, a bottleneck may occur if too many drones offload their task to a single GCS. Therefore, by using our proposed scheme, which offloads the workload between clusters of drones, this bottleneck is resolved.
As for the drone mobility model, Bujari et al. [
25] defined some drone scenarios and mobility models. As an overview, the authors categorize a drone’s mobility model as pure randomized, time-dependent, path-planned, group mobility, or topology-control-based. It is important to define the mobility model of drones when simulating drone networks, because we want the drone movements in the simulation to be really similar with the real world drone movements to get reliable results. In our proposed scheme, we utilize path-planned mobility models to fit our simulation scenario.
3. Opportunistic Computation Offloading Scheme
The architecture of the opportunistic computation offloading scheme between clusters of drones is shown on
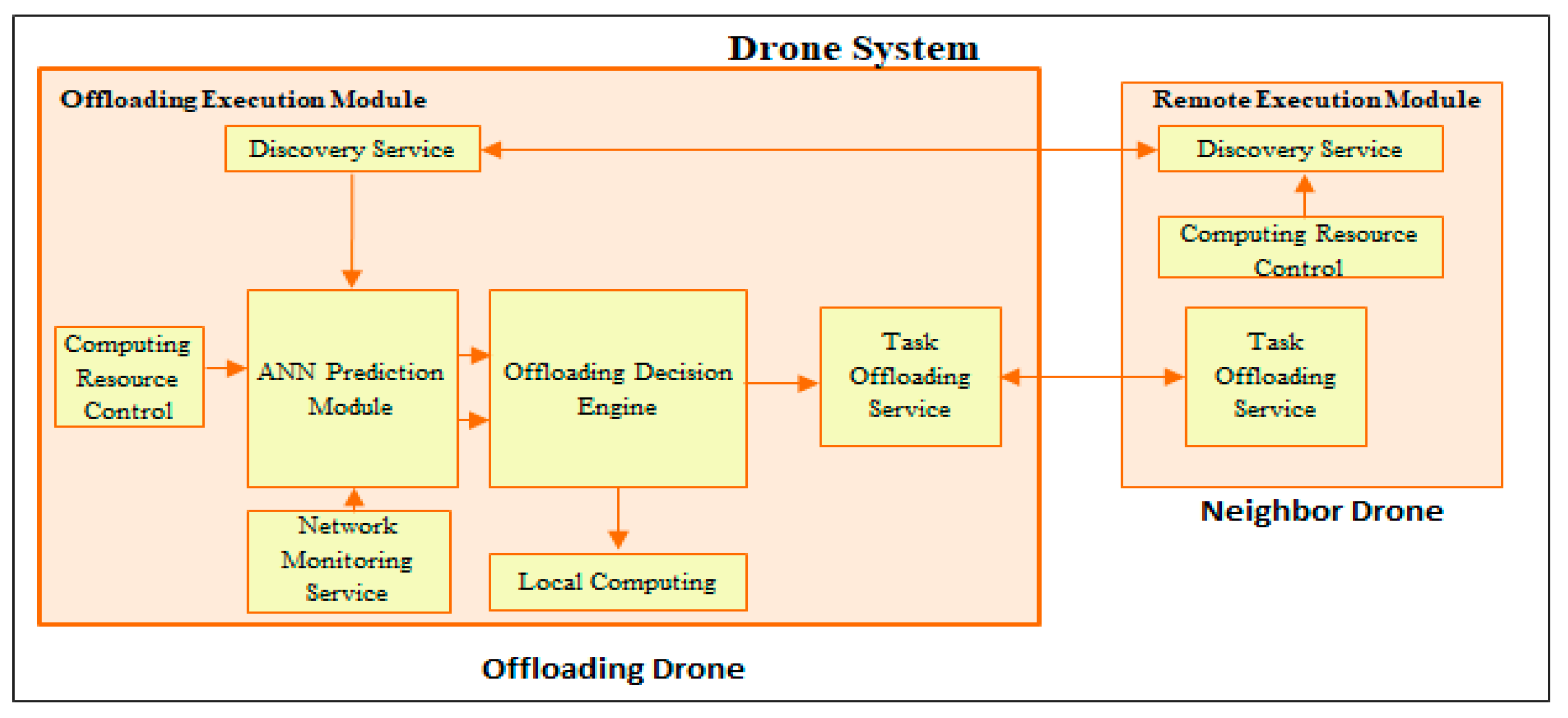
Figure 2. We divide the drone system into offloading drones and neighbor drones. Offloading drones conduct the offloading scheme and neighbor drones are the target for the offloading service execution. In the offloading drone system, there is an offloading execution module, which is the offloading framework to determine the offloading process. Computing resource control is used to monitor the computational resources of the UAV. A network monitoring service is run to obtain the instantaneous data rate of the UAV. A discovery service is used to determine whether the neighbor drone cluster has idle resources. All previous information will be fed into the artificial neural network (ANN)-based prediction module to estimate the response times for executing the application task locally and using the offloading scheme service. The result of the predicted response time will be sent into the offloading decision engine. If the offloading scheme has a shorter estimated response time than the local computing scheme, then the task offloading service will be called to handle the distribution of the workloads to the neighbor drones. Otherwise, the application job will be processed locally within the cluster. A remote execution module is run under the neighbor drone system. It also has a discovery service, which is linked into the computing resource control in order to send information about its available computing power into the offloading request cluster.
3.1. Cluster Discovery Scheme
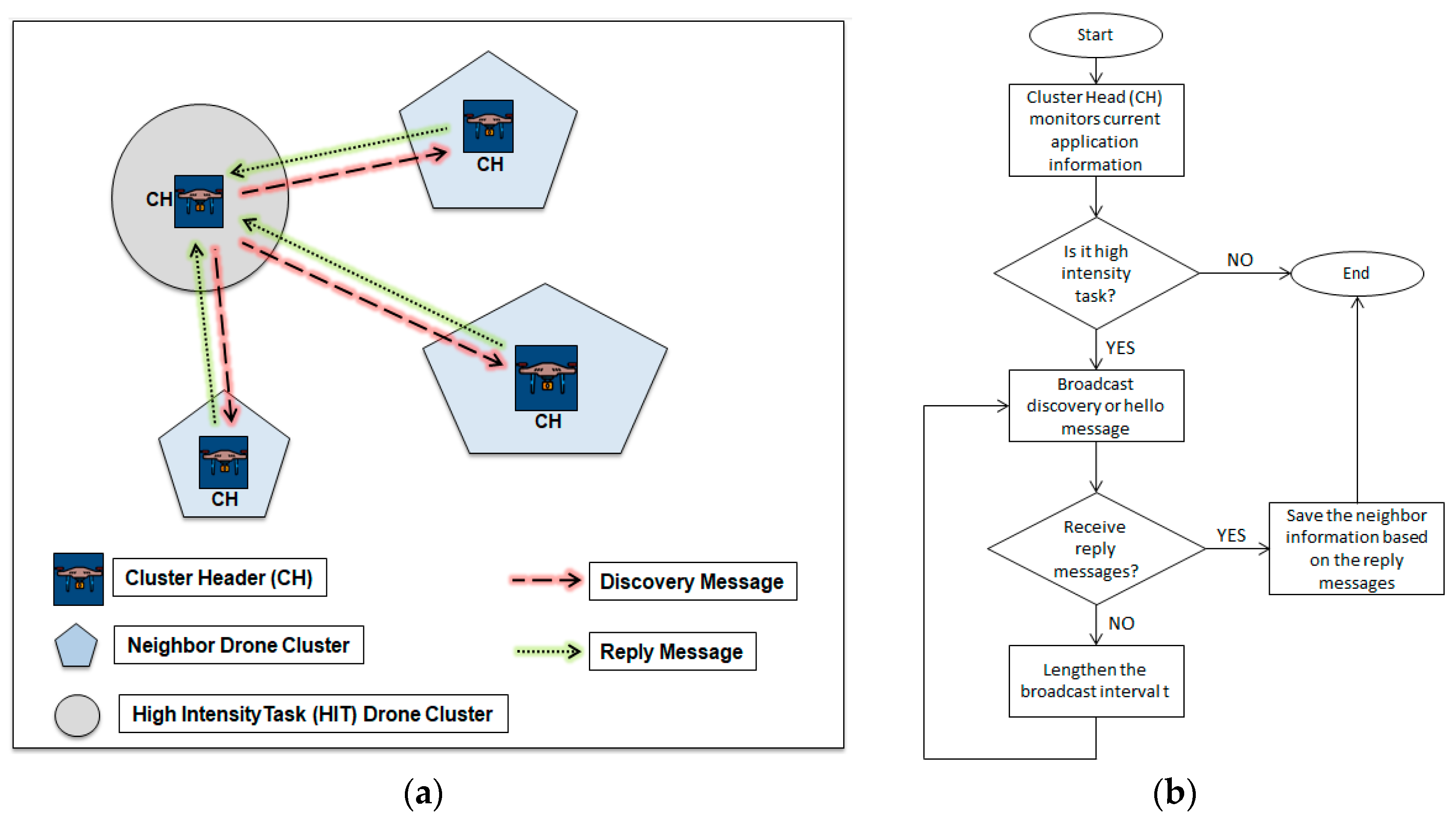
To execute the opportunistic offloading scheme, drone clusters must discover the existence of the other clusters near them first. In the proposed offloading scheme, the fundamental cluster discovery scheme is used. At the beginning phase of the offloading scheme, a cluster with a high intensity task (HIT) that requires the offloading process tells its cluster head to broadcast a discovery message to the nearby environment. The discovery message includes the source cluster ID and a discovery message header.
Drone cluster heads near the HIT drone cluster that received this discovery message will then reply with a message based on their resource utilization situation. If the availability of their computation resources exceeds a certain threshold value, then they will send back a reply message to the cluster head of the offloading requester; otherwise, the message will be ignored. The reply message contains cluster ID and resource utilization information. The HIT drone cluster head will receive the reply message, and then it will save the existence information of nearby drone clusters and their computational resource information to be used further in the next step.
The discovery message itself will be broadcasted periodically by the HIT drone cluster head every
t seconds. When discovery message has been sent n times with no reply messages received, the broadcast interval
t will be increased in order to minimize the message overhead. The cluster discovery scenario is shown in
Figure 3.
3.2. Computation Offloading Decision Module
The cluster head of the local UAV cluster will learn whether there exist other groups of drones after the discovery process is finished. Then, it may be able to proceed to the offloading decision taking stage, which will give a final offloading decision. Final decision will be either to execute the job tasks locally inside the cluster or to do offloading scheme to other clusters. Many kinds of input parameters are considered for taking the offloading decision. The discovery service will provide drone clusters’ presence information and also their computing resources. The streaming image data and other UAV tasks will be obtained from the camera or other sensors. More, the information about vacant computing power on the cluster will be provided by the computing resource control module. Network monitoring service will show the network channel condition between the cluster head and UAV members.
To obtain the final offloading decision, the proposed scheme estimates the elapsed response time (remotely or locally). By comparing whether computing the task locally is faster than offloading to other clusters, the offloading decision engine will come to a final conclusion. In this system, estimation of the response time is done by considering the communication delay (
tcomm) and computing delay (
tcomp). Let
T be the estimated time consumed for finishing all tasks.
Application tasks are denoted as
Ai = (
worki,
Ci, π
i), where
worki is the input parameter size of application
i,
Ci is the computation cycle required to complete the task, and π
i is the maximum tolerable delay to finish the application task. Computation delay could be calculated by accumulating all the computation power of each UAV cluster member. Computation power is obtained by multiplying the fully utilized central processing unit (CPU) computing delay of one cycle of the task (
toptimized) with the available CPU resources (
ravail) in percentage. CPU resources are usually partially used for stabilizing the drone position in the air and also for processing other software tasks; hence, (
ravail) represents the idle computing resources of the CPU. Given that
N is the total number of drones in a cluster, the computation delay (
tcomp) of each cluster can be written as (2).
Communication delay can be summarized into two types: cluster member to the cluster head (
tintra) within the same cluster and local cluster head to the remote cluster head (
tinter). In predicting the communication time cost, we consider the data rate of the communication network (
BW). For the
tintra case, the maximum
tintra(i) value will be used as the local communication cost, when considering the fact that each member could have a different
tintra value. For
tinter, the total input parameter size of the application task to be offloaded (
workCH) will be divided by the network data rate at that time.
Therefore, the estimated elapsed time for completing tasks locally (
Tlocal) and doing offloading (
Tremote) can be written as (5) and (6), respectively (given that the remote cluster has
j members).
From the estimated response time on (5) and (6), the decision engine is able to decide whether to compute the tasks locally or to offload the job application to the remote UAV cluster. By sharing the task opportunistically, the cluster’s task can be distributed more evenly; therefore, it would likely to increase operation time of each drone because the scheme will prevent usage exploitation of one single cluster only. Borrowing the available computing resources from other clusters would likely decrease the response time of the drones. However, computing the estimated response time heuristically could result in some error on the prediction module engine, which eventually will decrease the offloading performance due to suboptimal decisions. Also, computing the response time estimation every time that the UAV clusters want to finish its task will cause too much delay overhead. Therefore, to enhance the current prediction module performance, we adopt a machine learning technique to learn the optimal offloading decision given various combinations of the task size, network condition, and computation resources of each UAV.
3.3. Artificial Neural Network-based Response Time Prediction Module
To achieve a more accurate response time prediction module, we propose an artificial neural network-based prediction module as a part of the decision engine on our system. Unlike the work in [
26], which uses a linear regression technique and heuristic algorithm to predict the estimated response time, in this work, the proposed scheme utilizes the machine learning technique, specifically an ANN. The main reason is that the response time value is actually non-linear data, so a higher prediction error would likely to occur if linear regression was used. Instead, by adopting the ANN, we could train and test the network to have a non-linear regression model to better estimate a response time.
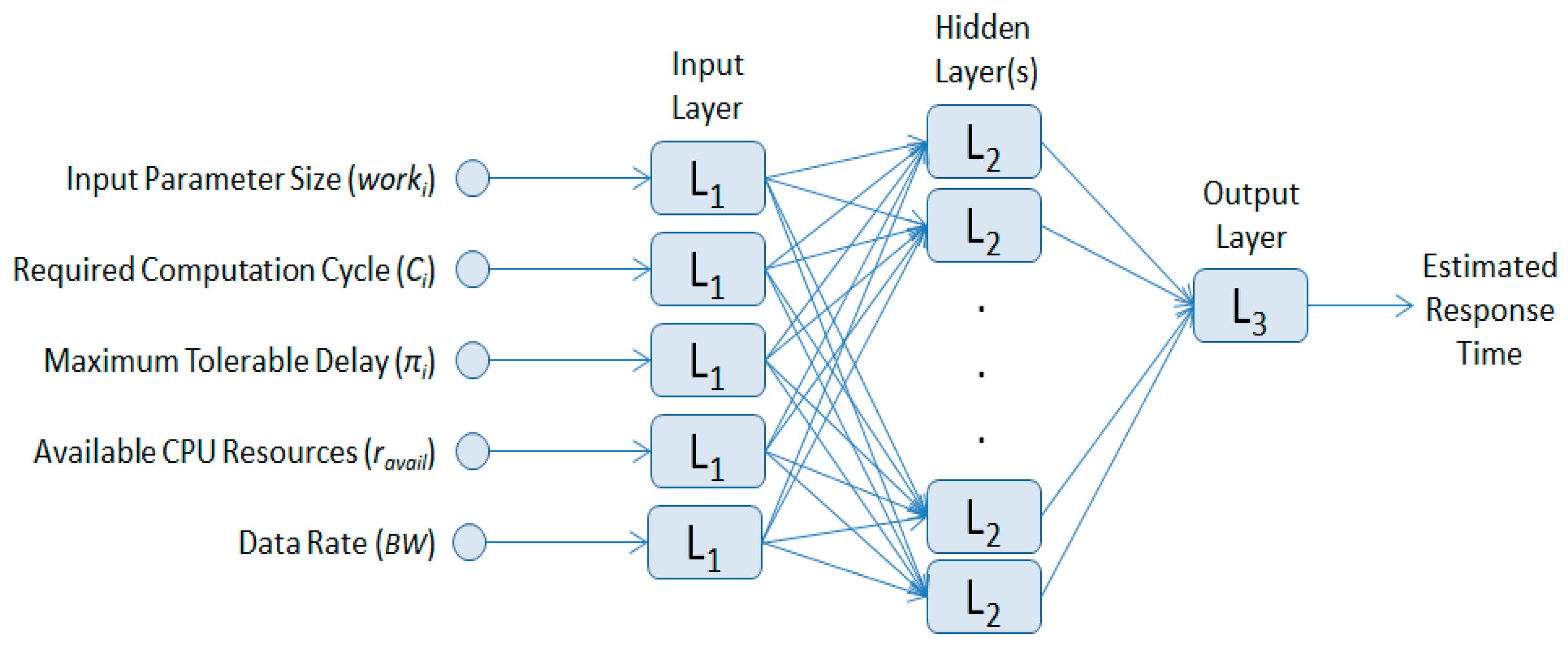
Typical feed-forward neural networks are composed of an input layer, one or more hidden layers, and a single output layer (see
Figure 4). The input layer will include
worki,
Ci, π
i,
BW, and
ravail as input features. We use 10 hidden layers to achieve optimal performance for our computation offloading scheme. The optimal number of the hidden layers can be obtained by brute force in the network training session. The number of the hidden layers that will give the best performance will be different as the data input changes; therefore, a validation technique is used to ensure the generality in the trained prediction module. The output layer will give the estimated response time of our offloading scheme. Our proposed scheme adopts an offline learning approach, so we trained our neural network before deploying it to the drone system. By doing so, we only have one time delay cost for training the network beforehand. After being trained, we deploy the ANN-based response time prediction module to each drone cluster.
3.4. Task Offloading Service
This service module is responsible for distributing the workload when the cluster head wants to do the offloading process. The task offloading service will be run after the offloading decision is made. After obtaining the information about the destination cluster and its resource information from the offloading request reply message, this module will divide and distribute the workload between the local cluster and the destination remote cluster. All of the workload will be sent through the local cluster head to the destination cluster head. Each cluster head finally takes care of distributing the smaller workload again to each cluster member. After processing the task, the task result is integrated again in the cluster head in a similar way. Since our focus in this study is not on the load distribution algorithm itself, we adopt an existing algorithm in this work [
27,
28,
29].
5. Conclusions and Future Work
Drones are gaining in popularity, and this is proven by the many services that are now provided by drones. Due to the need of more complex workloads as drone technology grows, the utilization of multiple UAVs or drone clusters is preferred because clusters of drones are capable of increasing the coverage area, reducing response time, and offering more reliability than a single UAV. However, drones still have limited battery and computing power; therefore, in order to increase their operating time and reduce their response time, in this study, we proposed a scheme to conduct computational offloading opportunistically between drone clusters. By estimating the elapsed response time of processing tasks locally or remotely, the proposed method can adaptively offload some work to a remote drone cluster. By using the proposed scheme, we can increase drone operation time by distributing the workload more evenly and reduce the response time by borrowing available computing resources from other drone clusters. Moreover, the ANN-based response time prediction was utilized to give the offloading system better performance. In future work, we would like to implement our opportunistic offloading scheme between drone clusters on various real test bed environments and enhance the current offloading algorithm.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}