
A Direct and Non-Singular UKF Approach Using Euler Angle Kinematics for Integrated Navigation Systems


Abstract
:1. Introduction
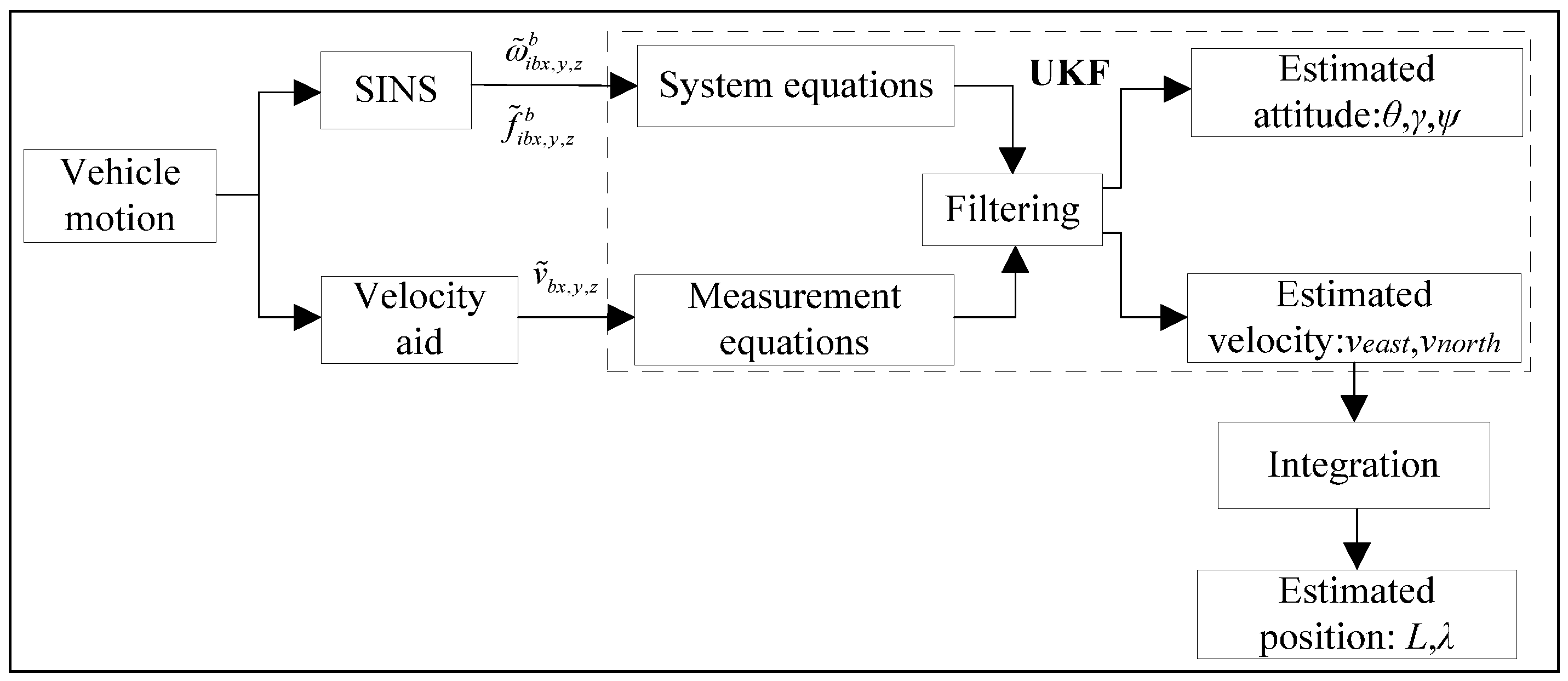
2. System Model and Measurement Model
2.1. System Model
2.2. Measurement Model
2.3. Filter State Model Analysis
3. UKF
| Algorithm 1. UKF |
| 1. Initialize |
| where x0 and P0 are the initial state and the initial covariance matrix, respectively. |
| 2. Time update |
| Factorize |
| Evaluate the sigma points (j = 1, 2… Ns): |
| Evaluate the propagated sigma points ( j = 1, 2… Ns): |
| Estimate the predicted state: |
| Estimate the predicted state error covariance: |
| where ξj and aj are the j-th sigma point and the associated weight, respectively, Ns denotes the number of the sigma points, and Qk-1 is the discrete system noise covariance matrix at time tk − 1. |
| 3. Measurement update |
| Factorize: |
| Evaluate the sigma points ( j = 1, 2… Ns): |
| Evaluate the propagated sigma points (j = 1, 2… Ns): |
| Estimate the predicted measurement: |
| Estimate the innovation covariance matrix: |
| Estimate the cross-covariance matrix: |
| Estimate the Kalman gain: |
| Estimate the updated state: |
| Estimate the corresponding error covariance: |
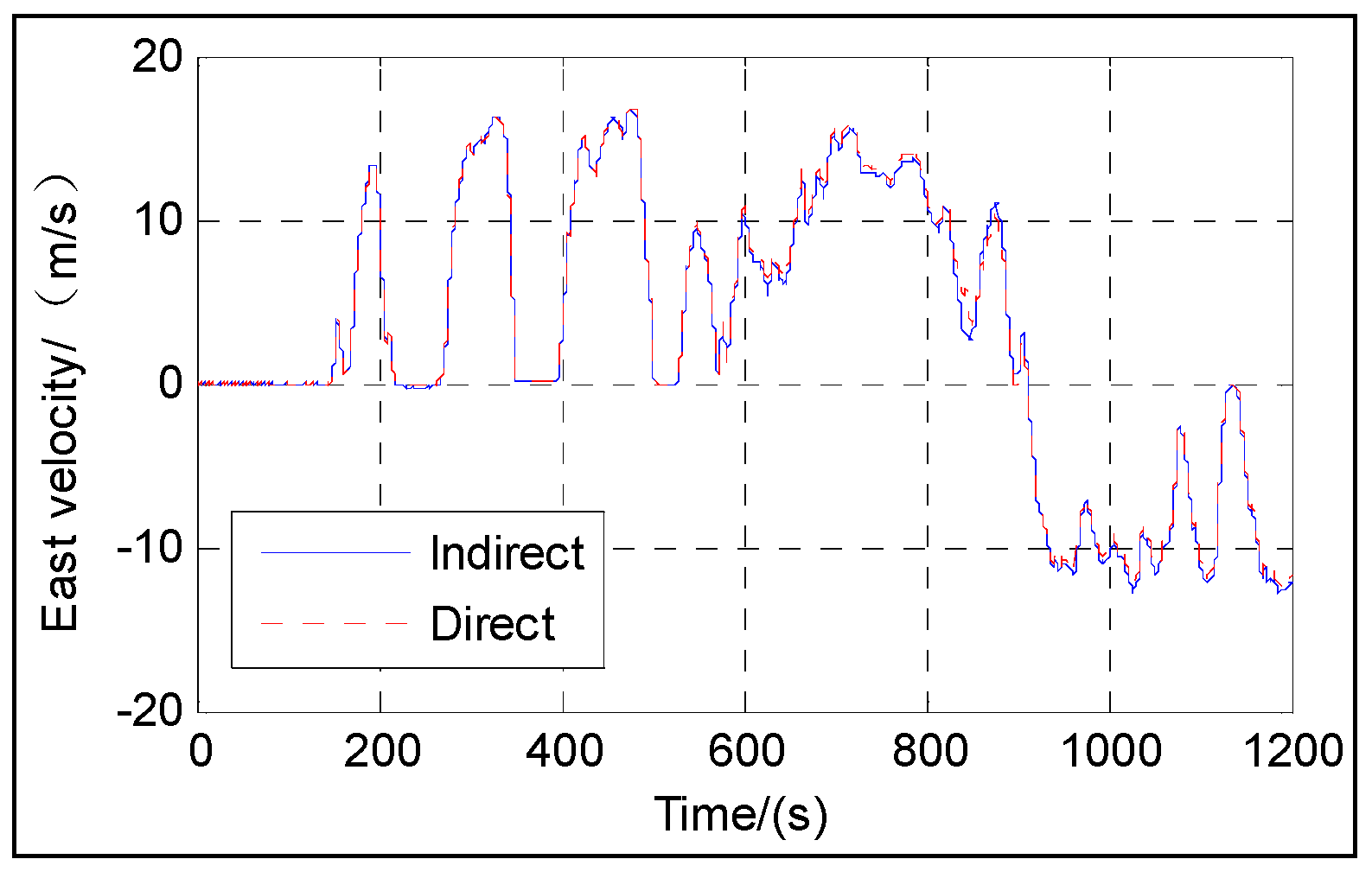
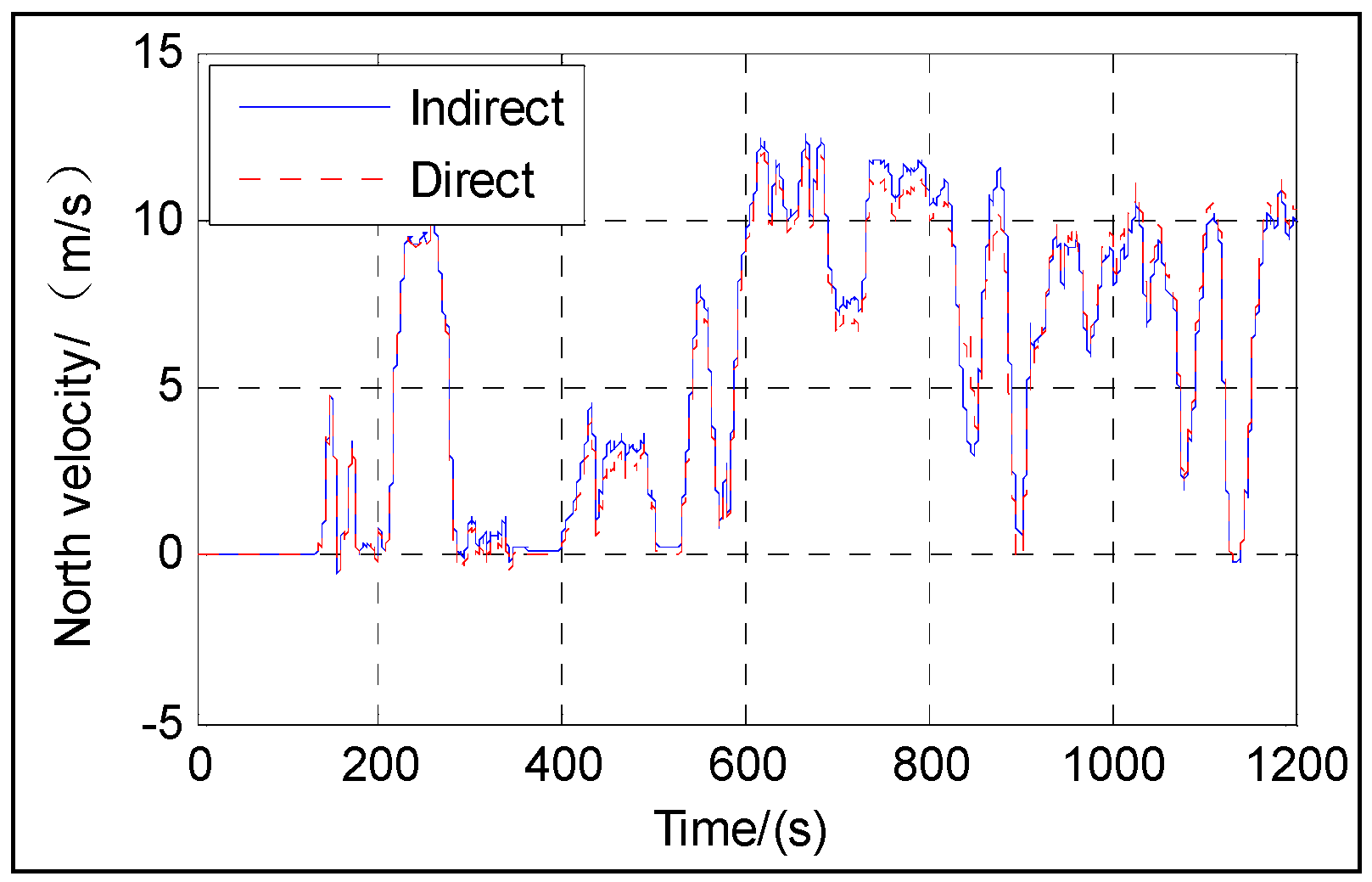
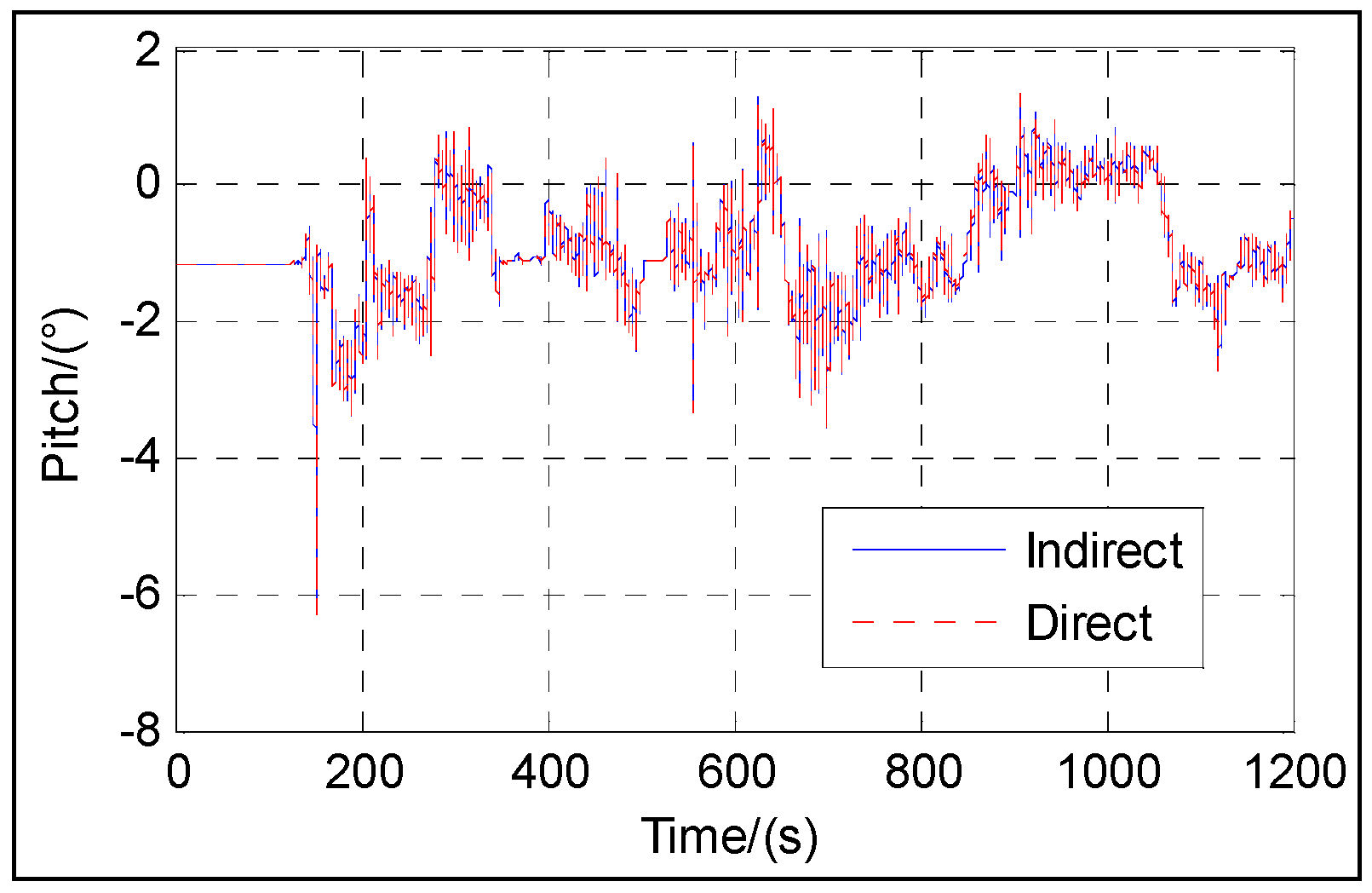
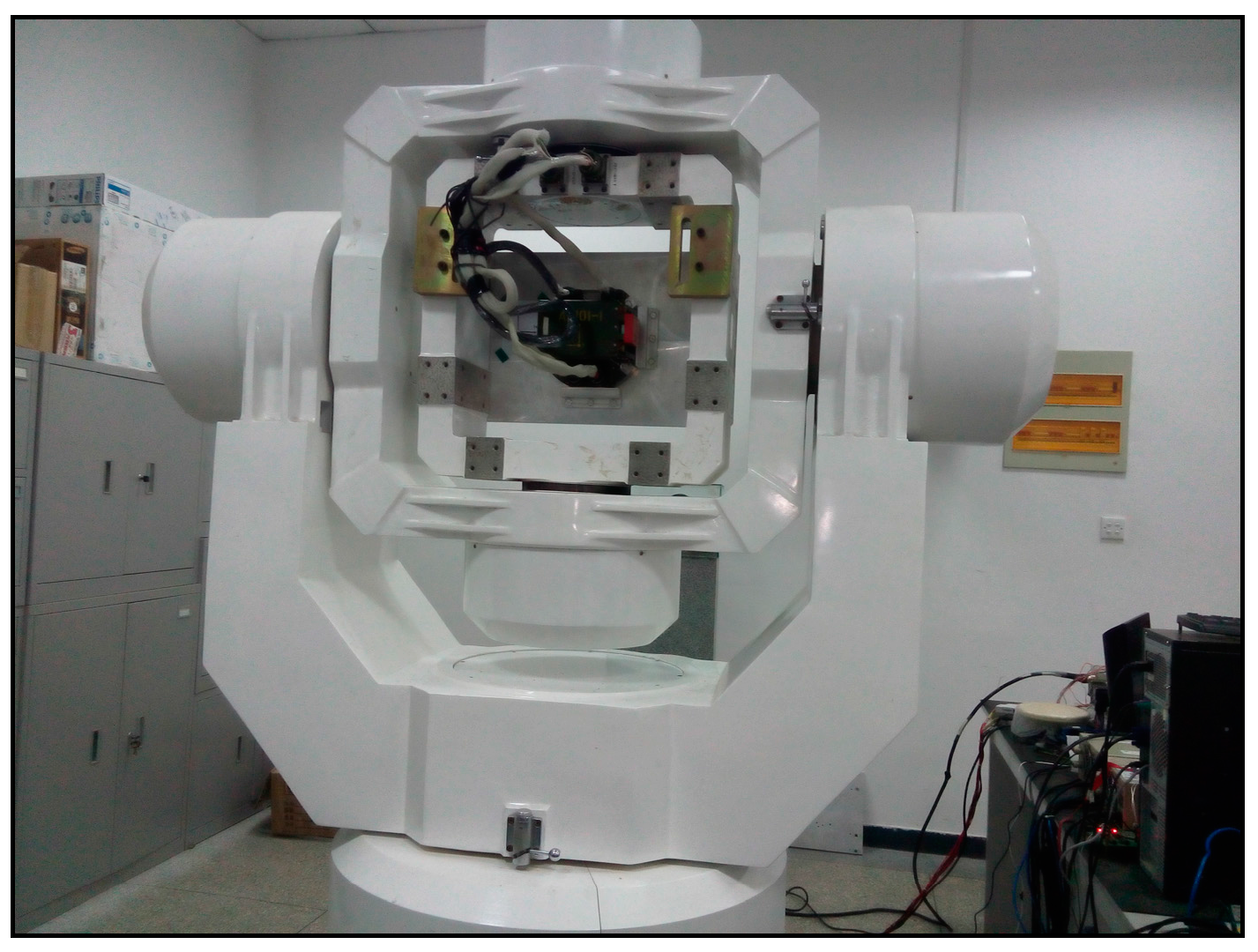
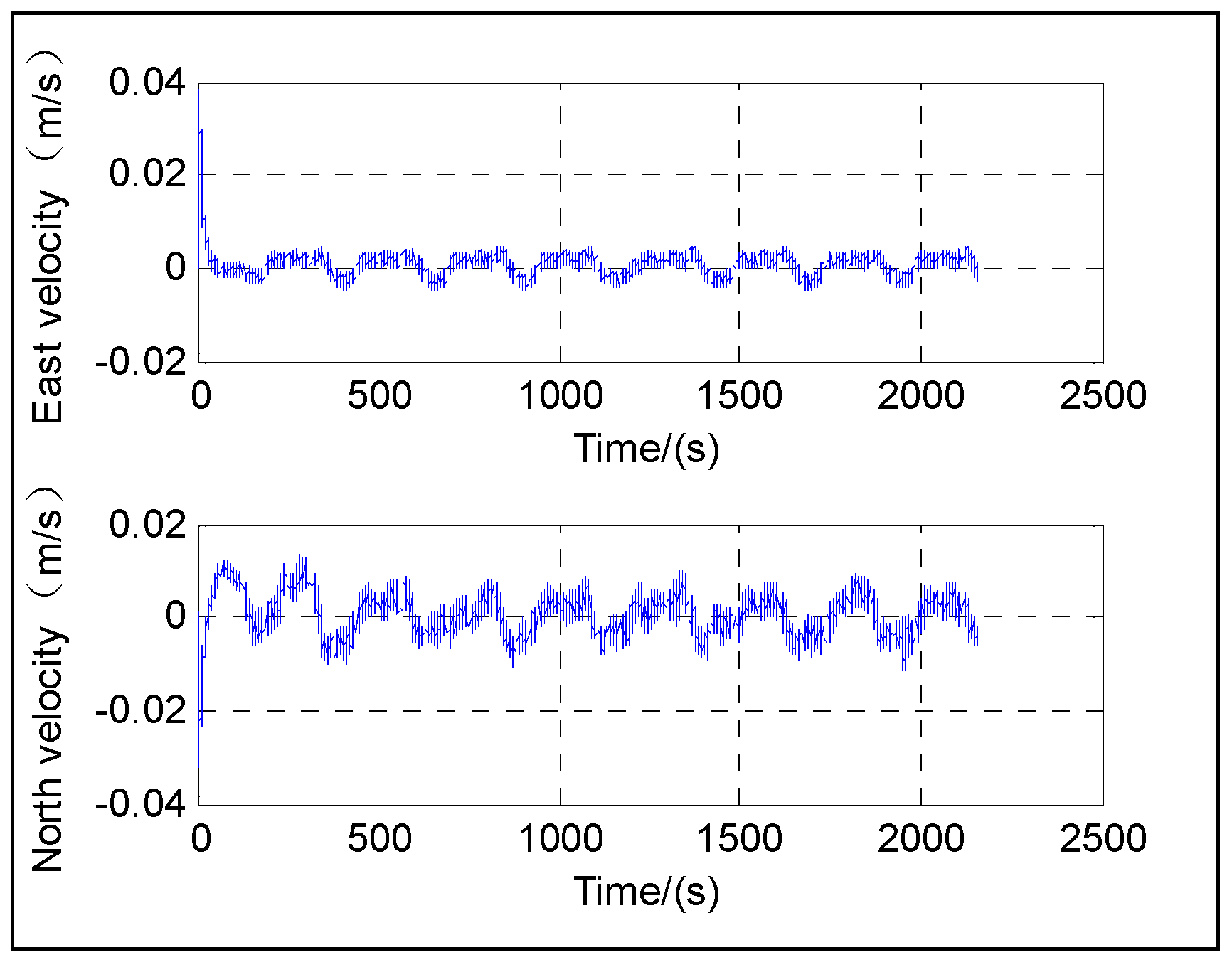
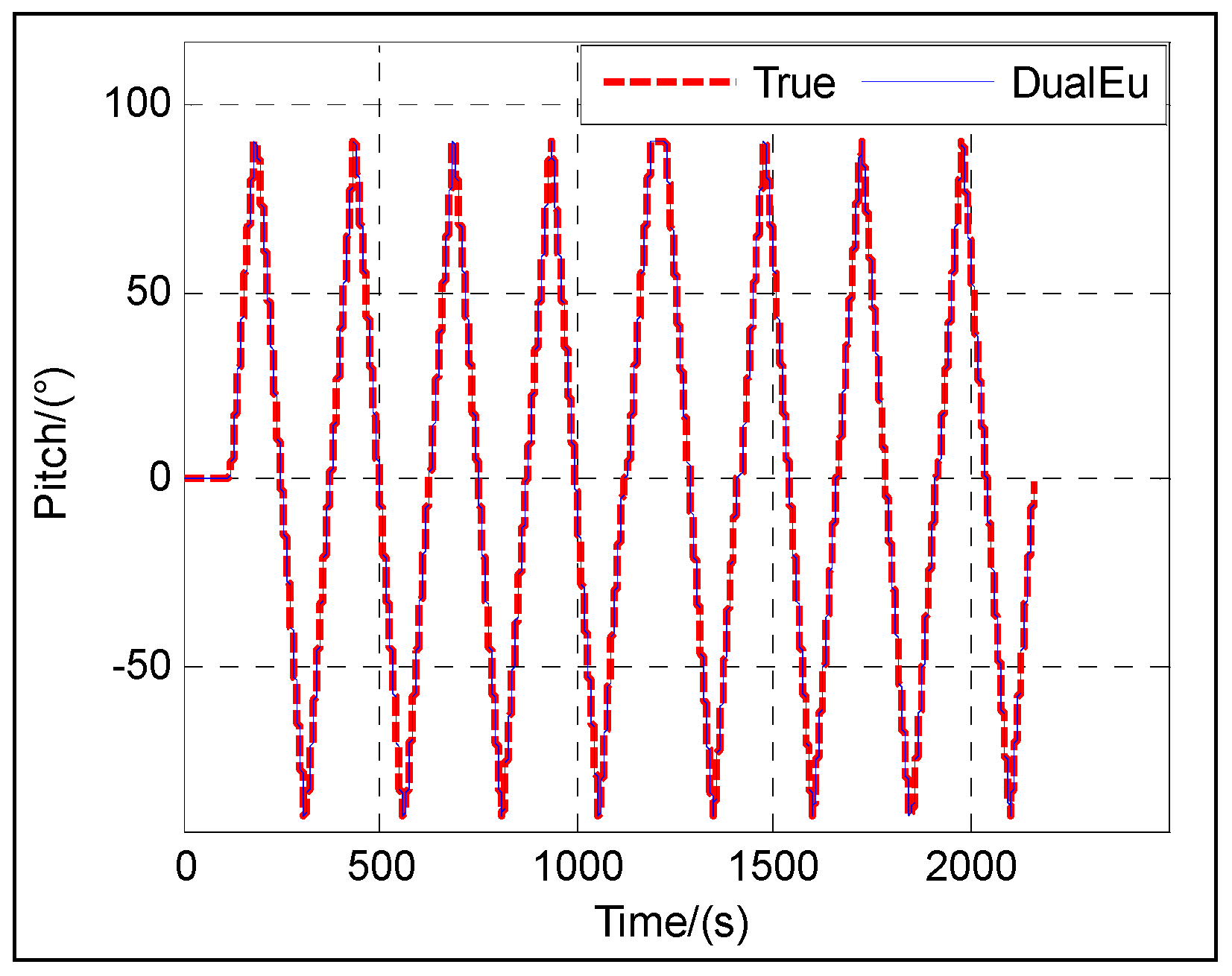
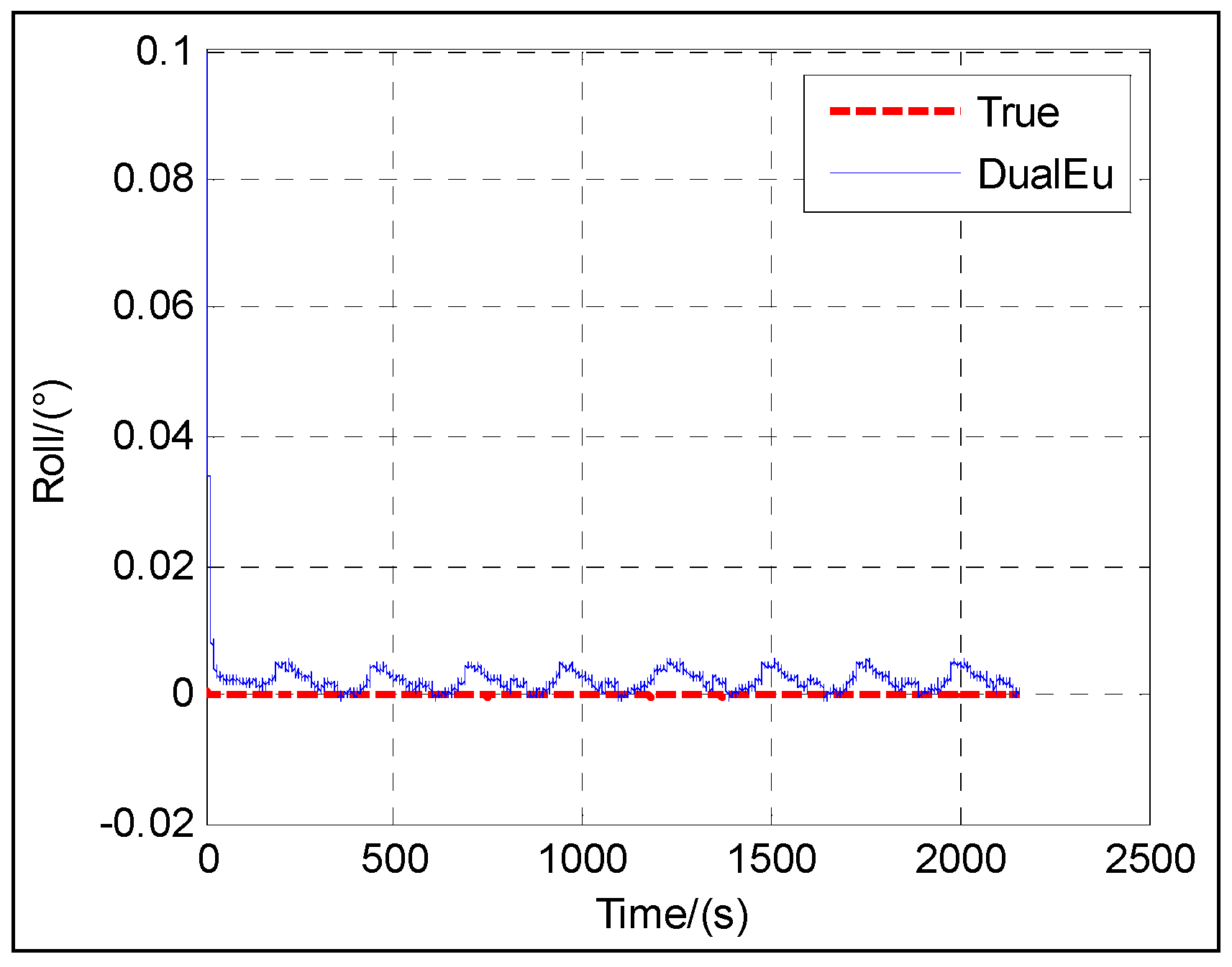
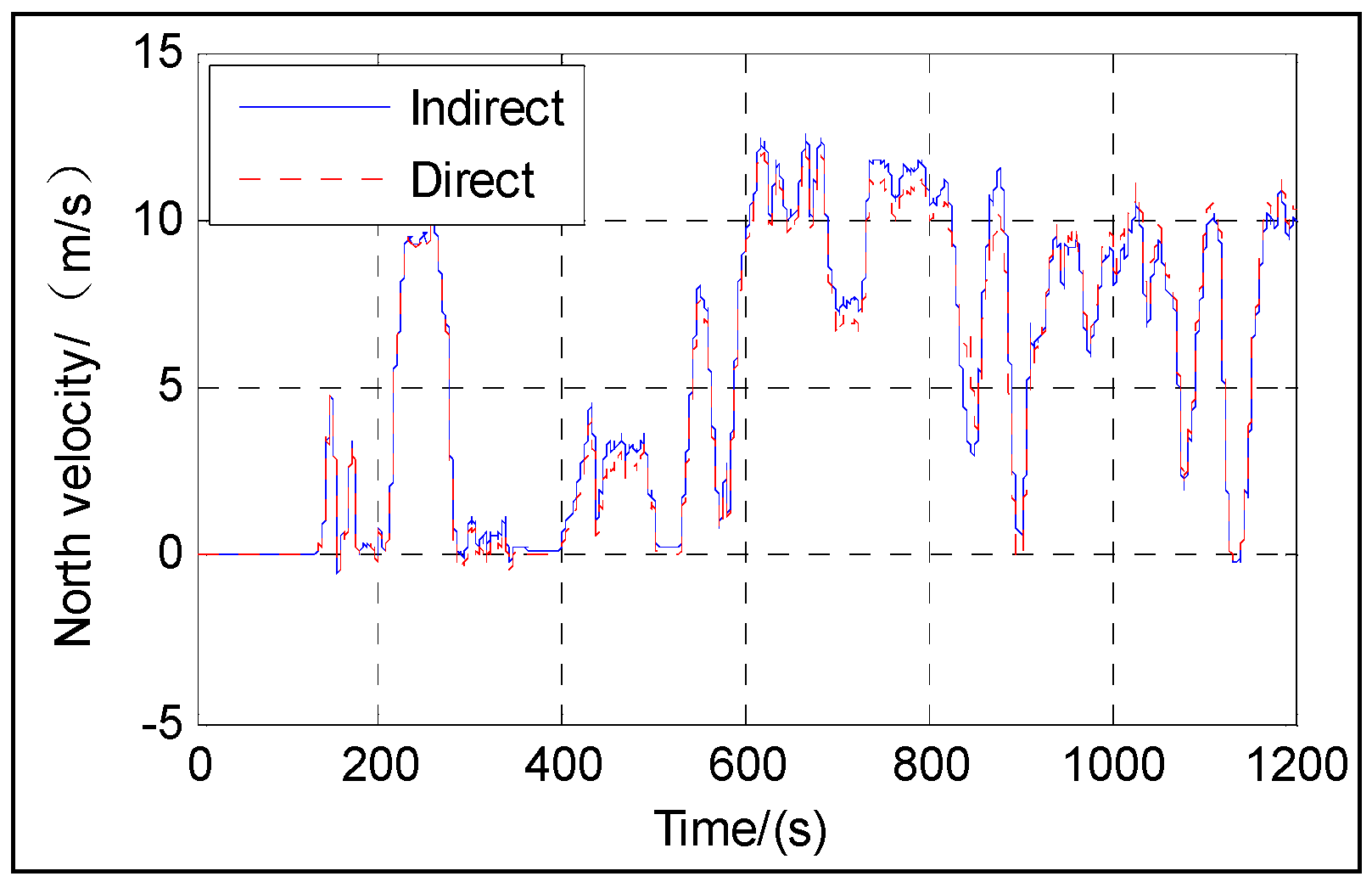
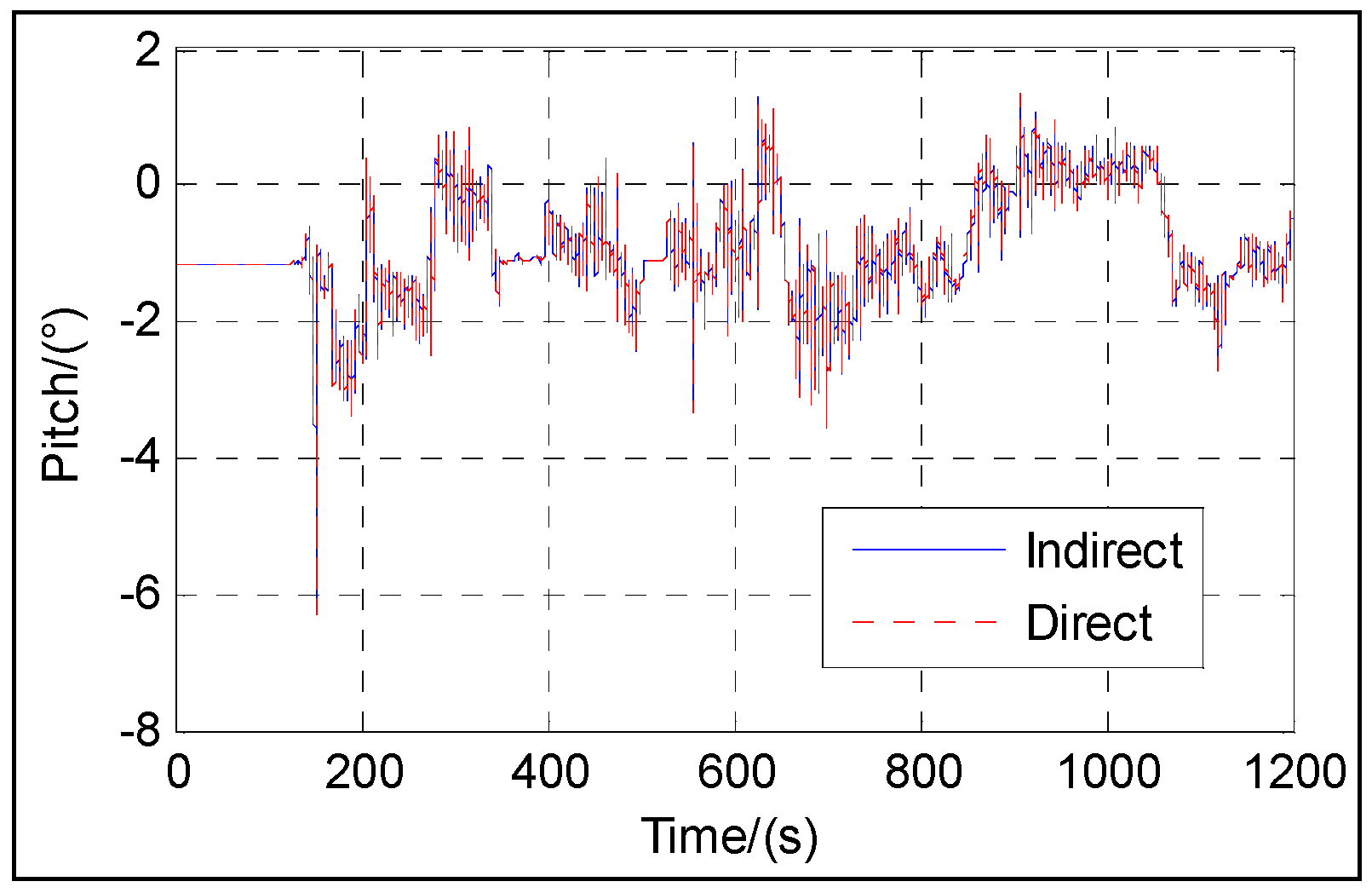
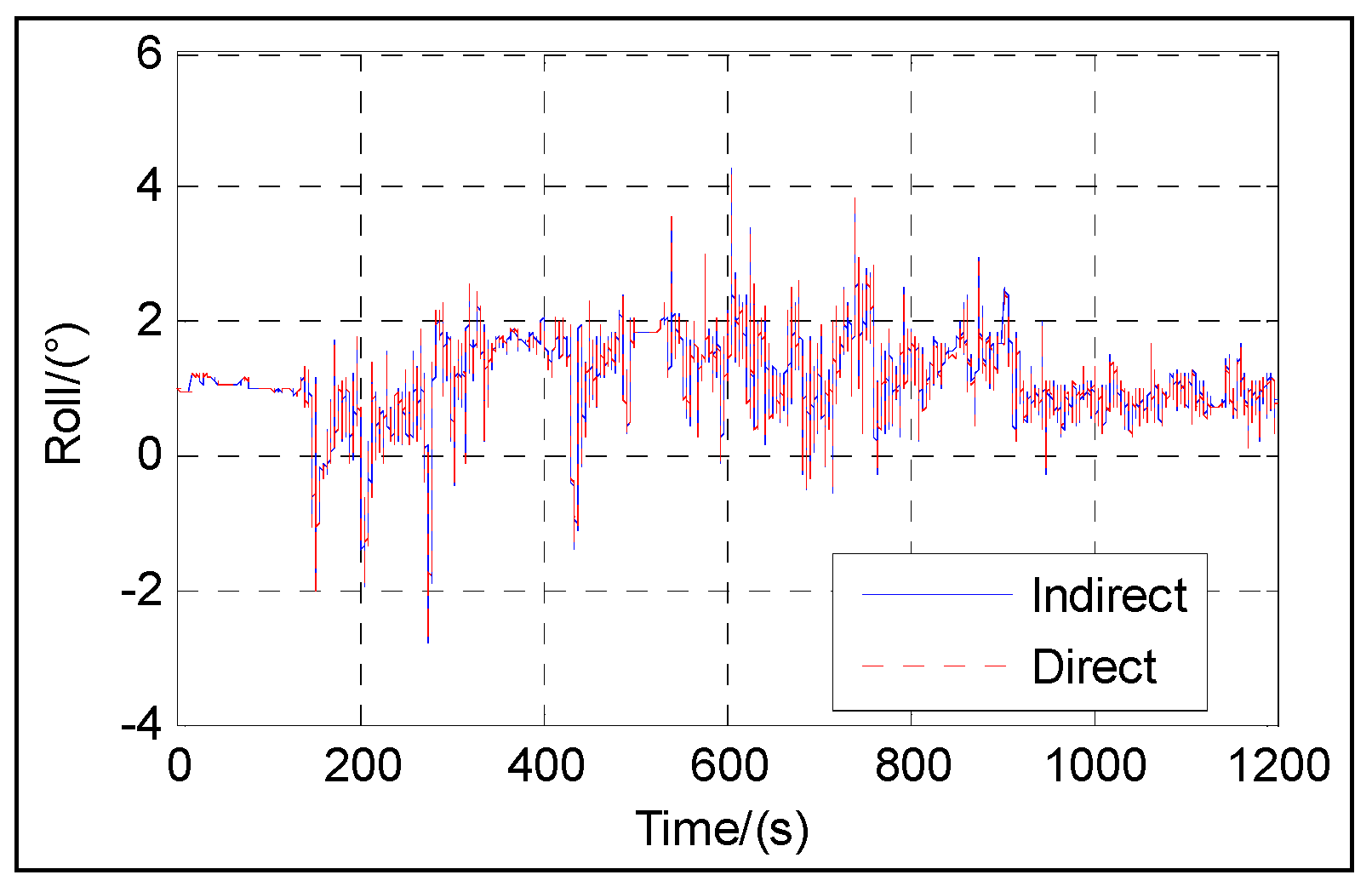
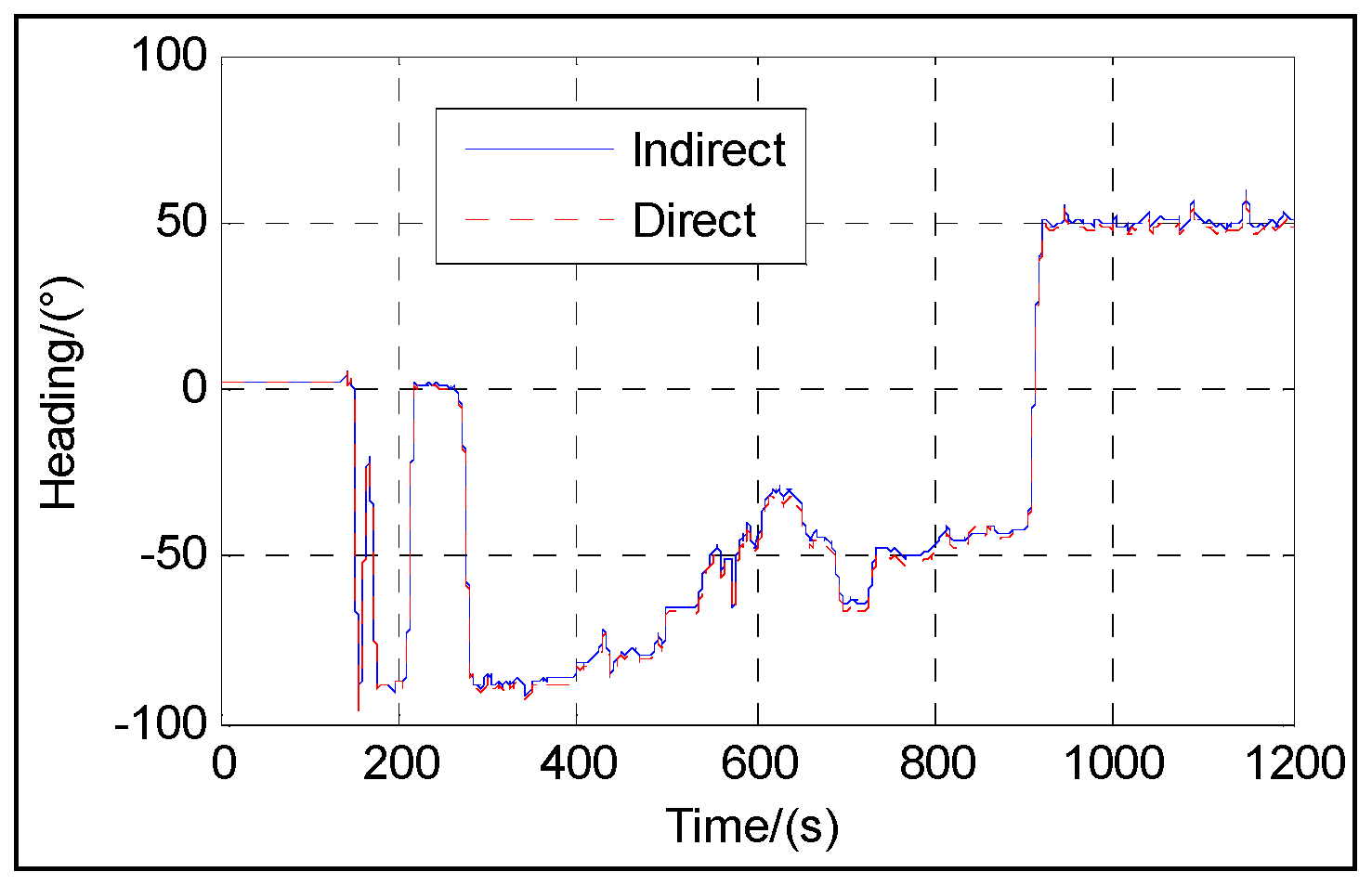
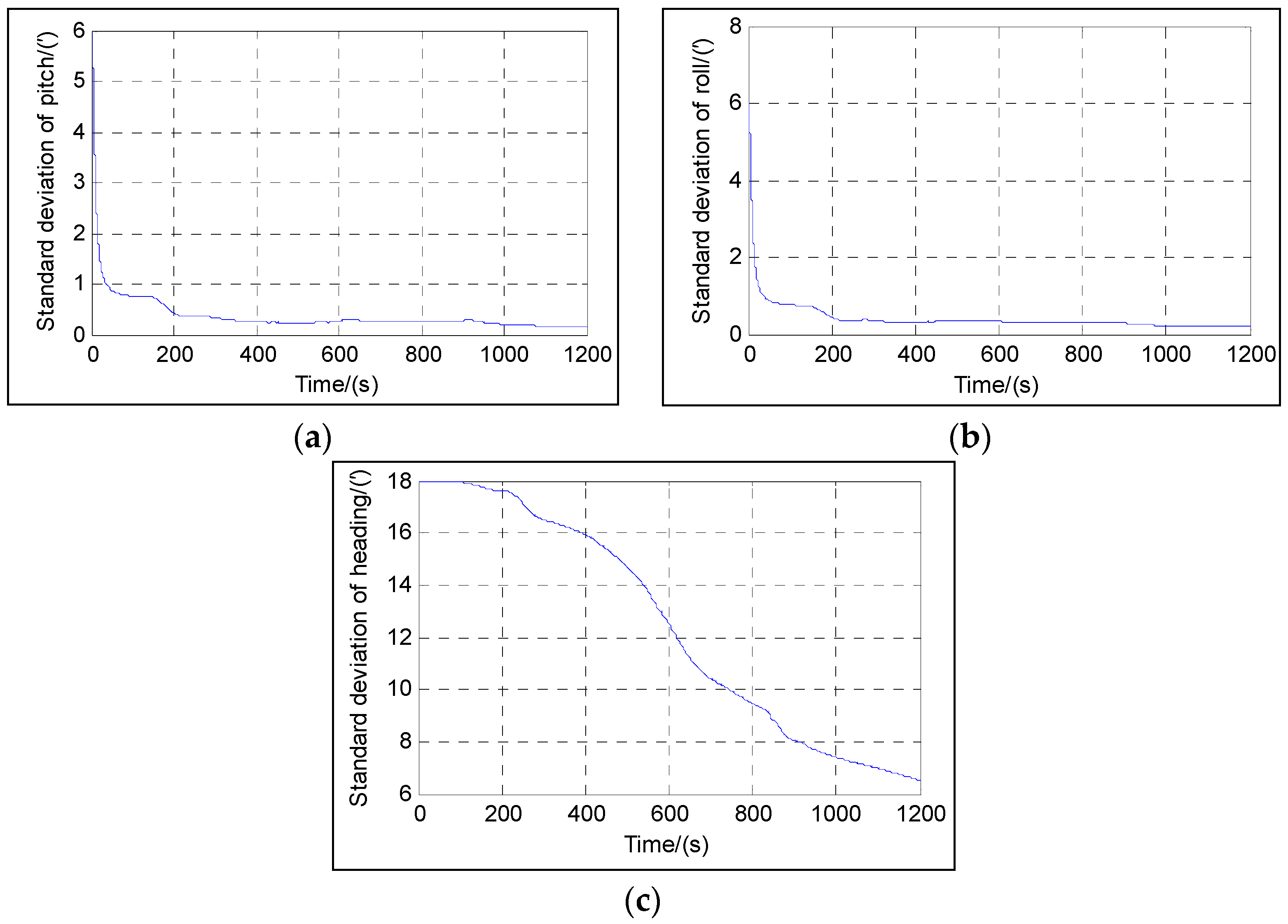
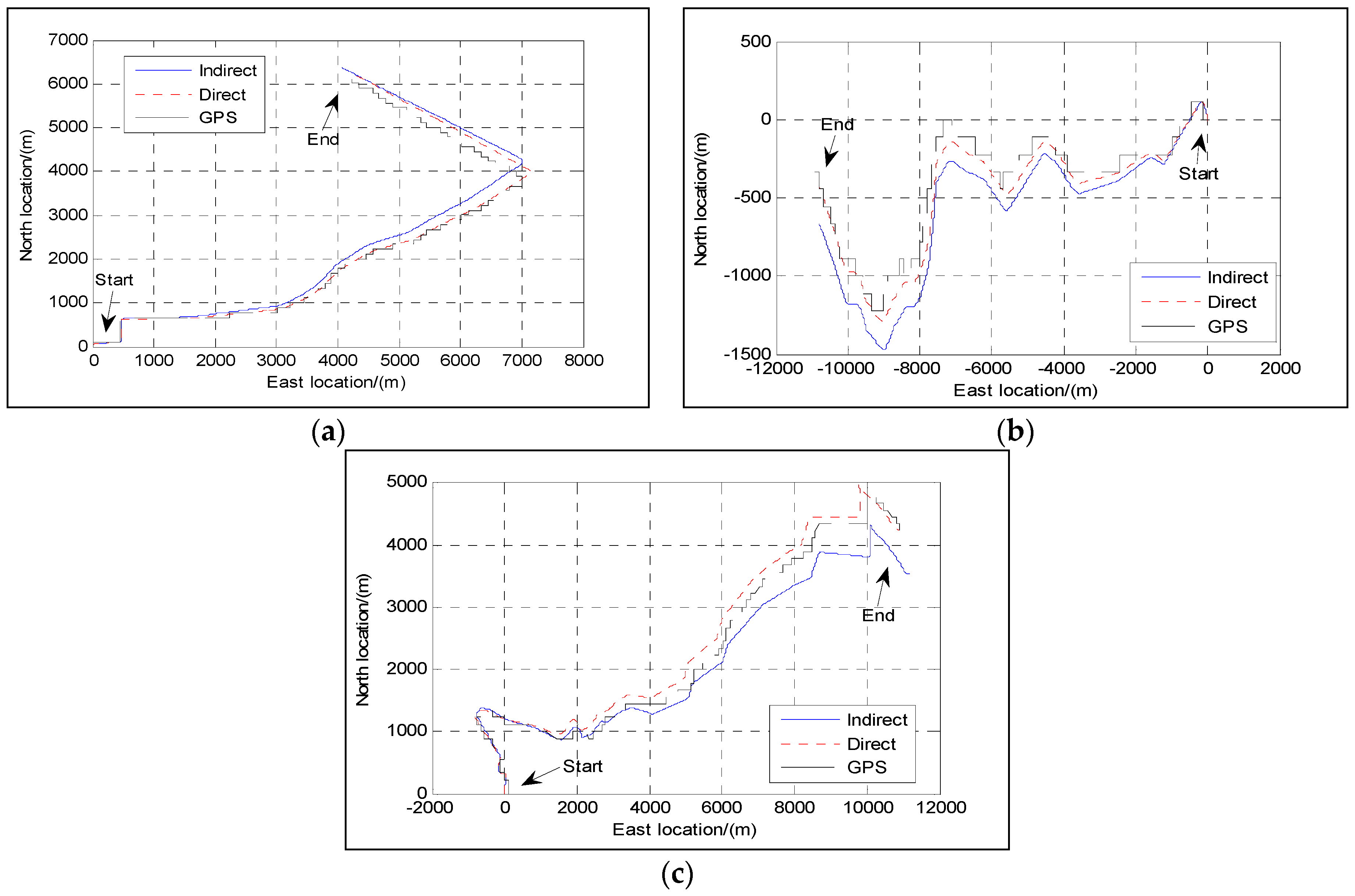
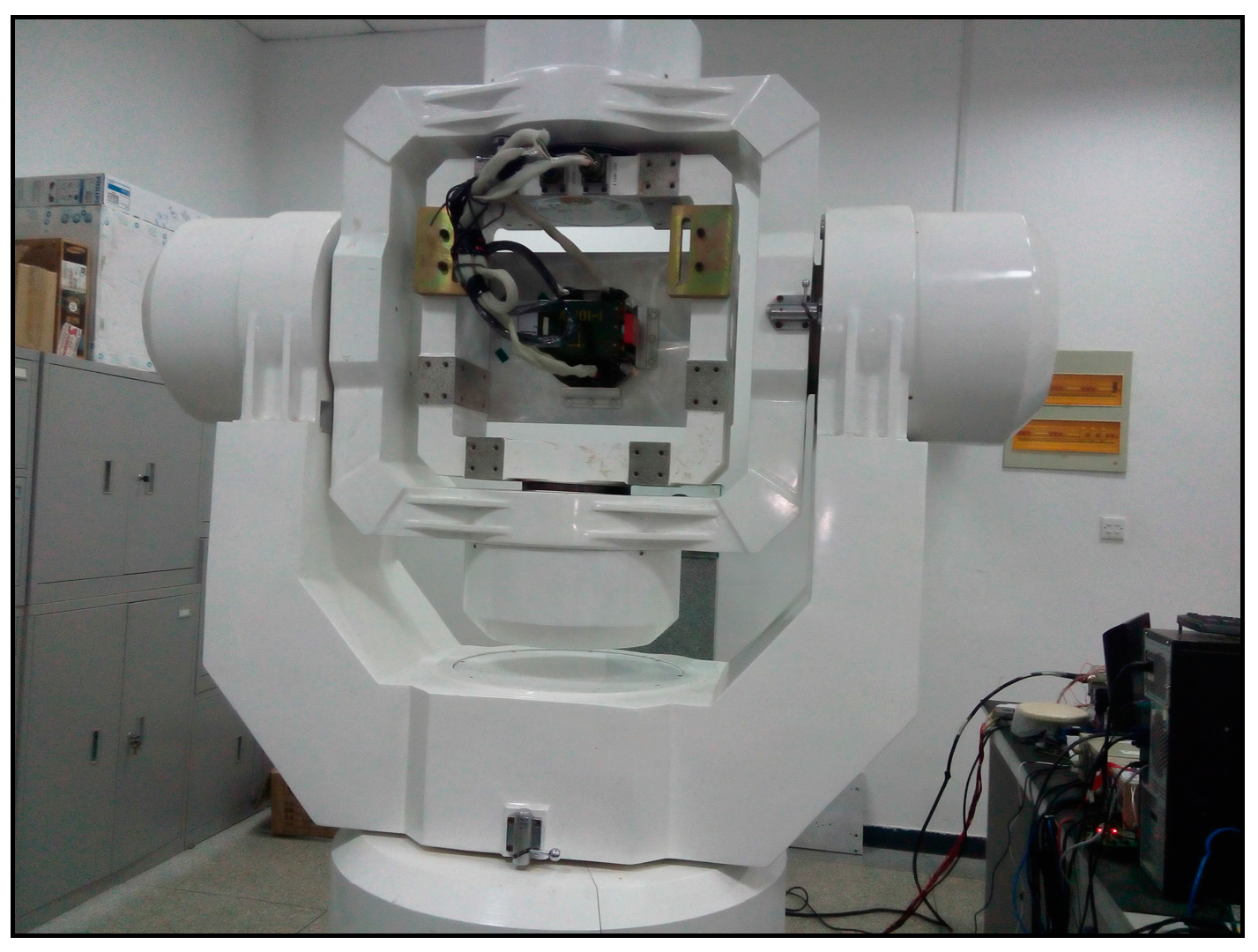
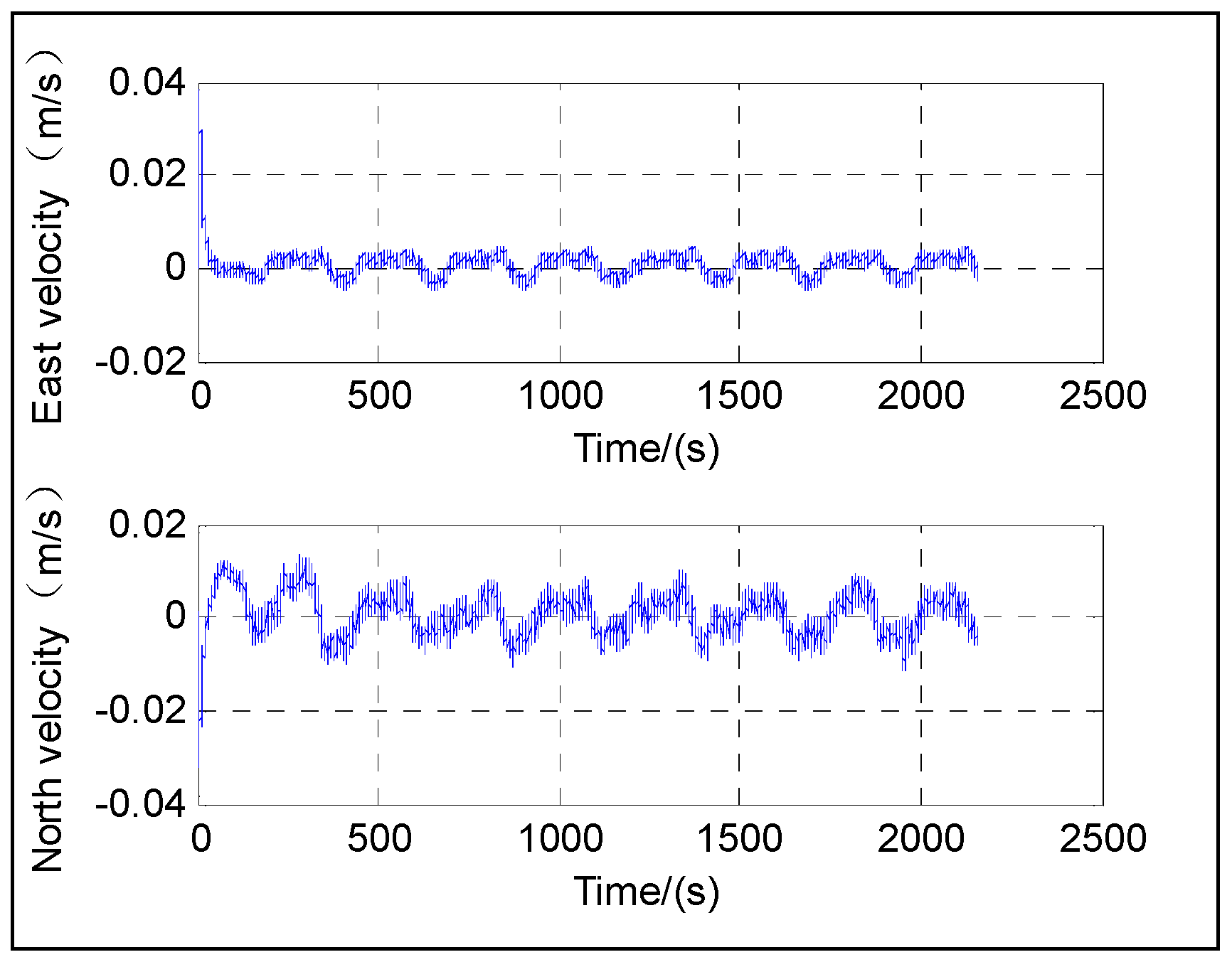
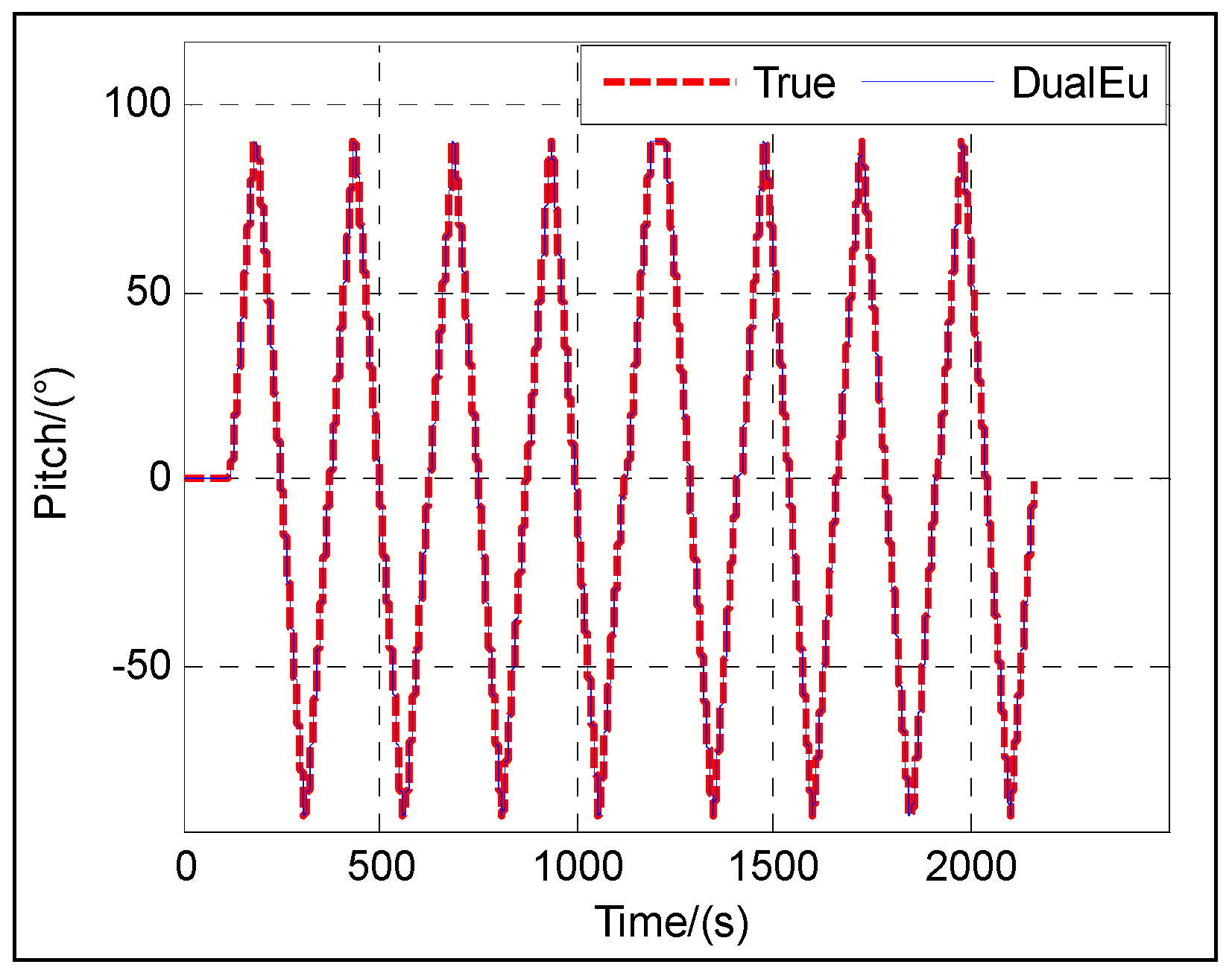
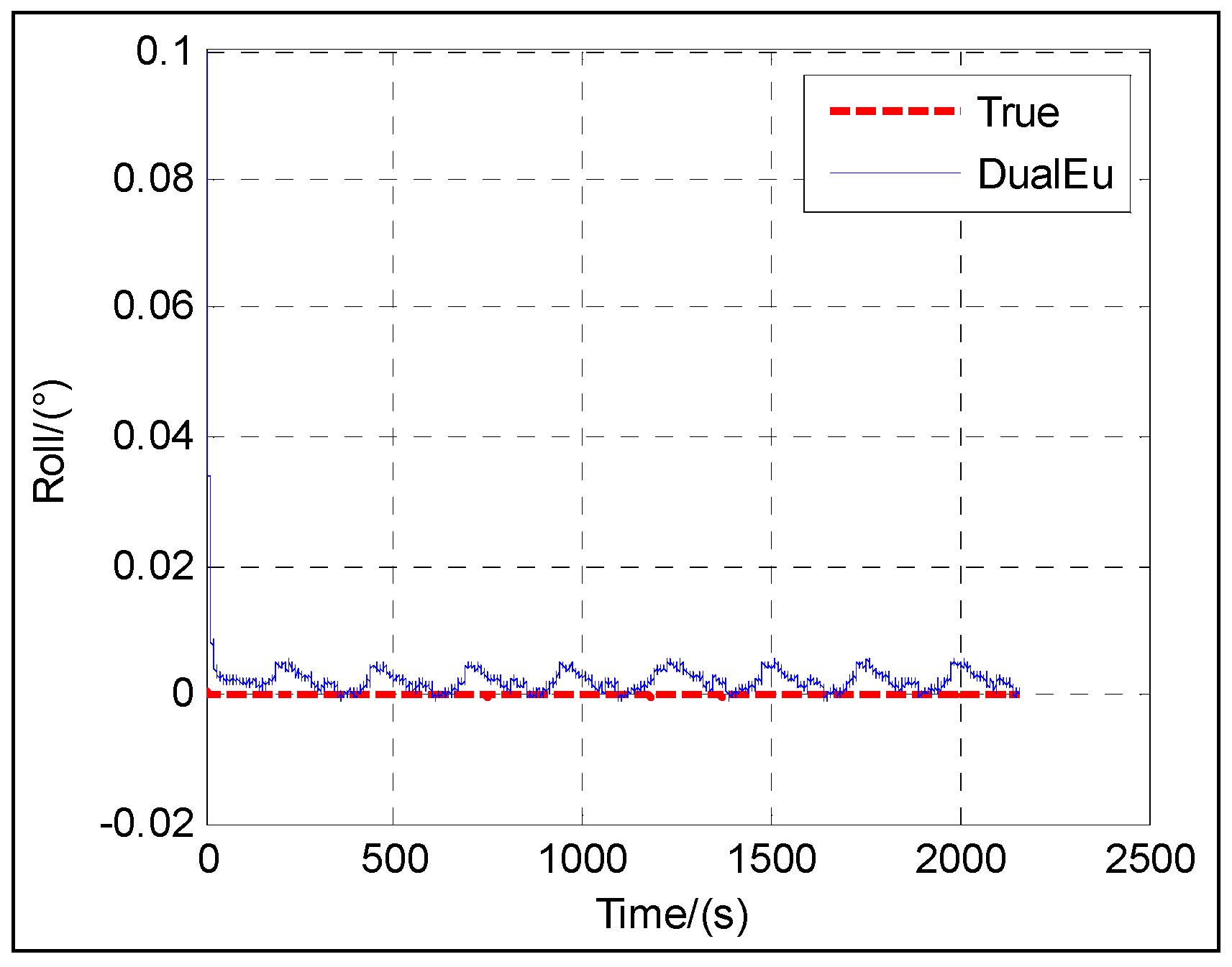
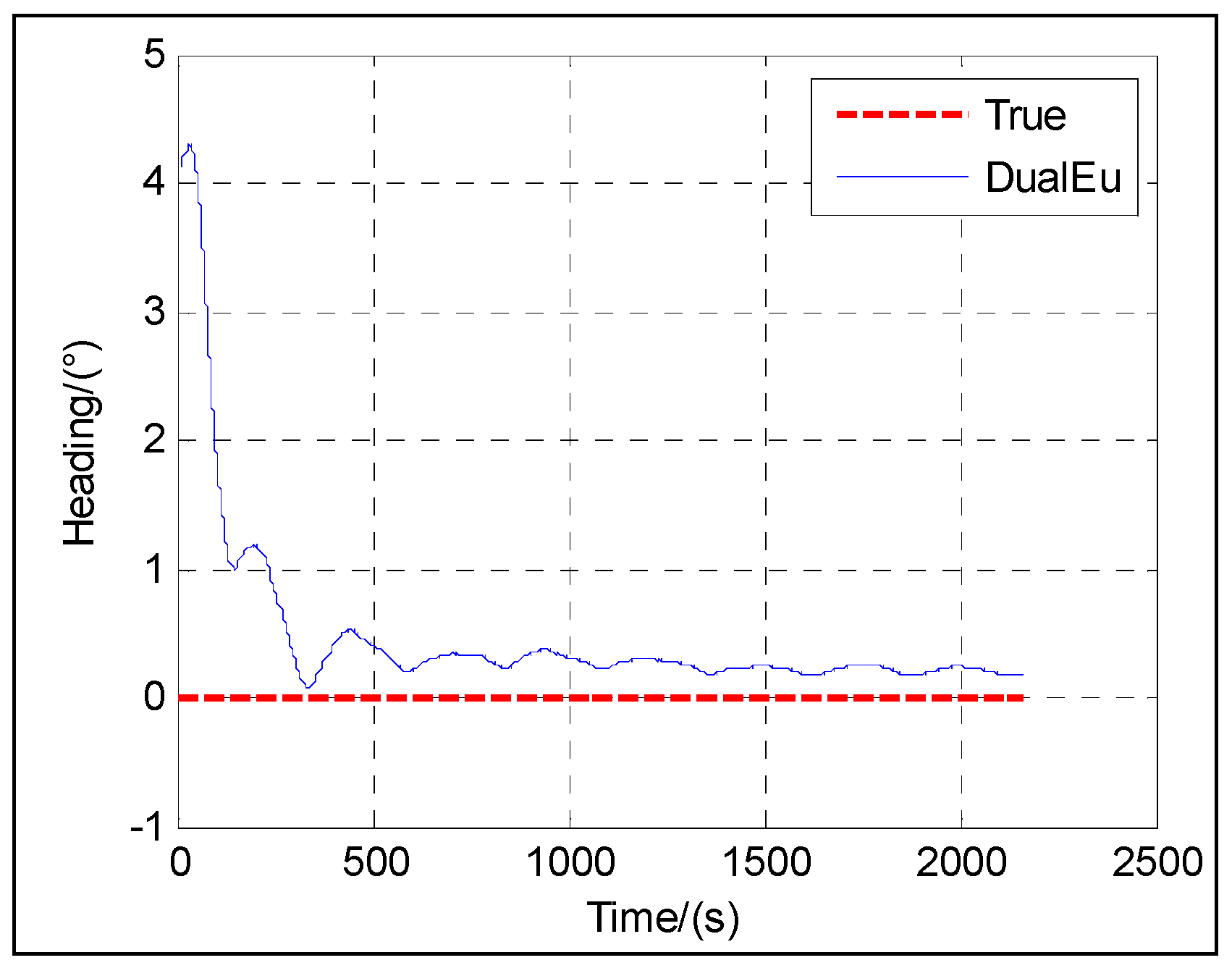
4. Experimental Results
- P0 = diag{(0.1 m/s)2, (0.1 m/s)2, (0.1°)2, (0.1°)2, (0.3°)2, (0.2 mg)2, (0.2 mg)2, (0.03°/h)2, (0.03°/h)2, (0.03°/h)2}
- Q = diag{(0.2 mg)2, (0.2 mg)2, (0.03°/h)2, (0.03°/h)2, 0.03°/h)2,0,0,0,0,0}
- R = diag{(0. 1 m/s)2, (0.1 m/s)2, (0.1 m/s)2}
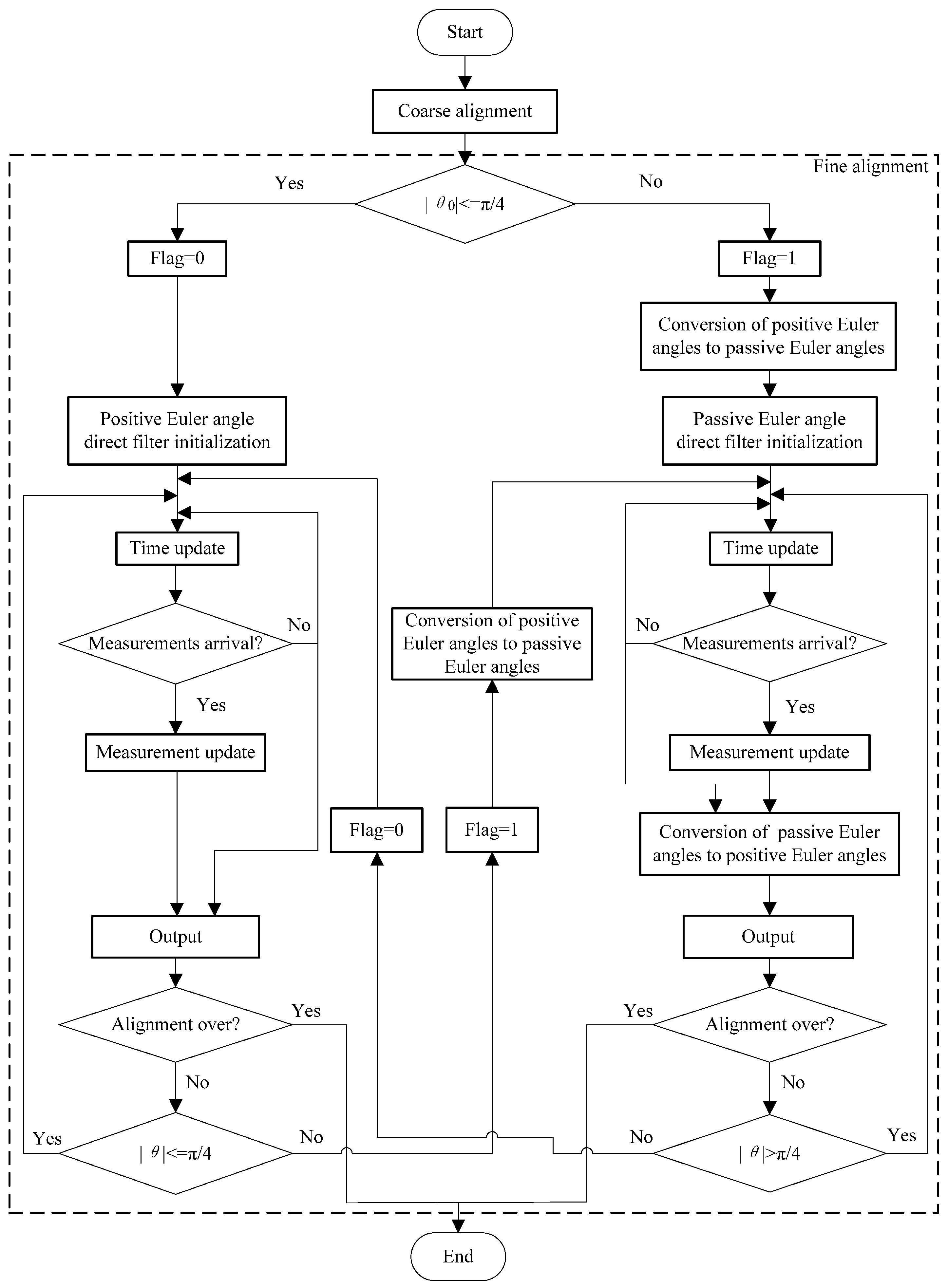
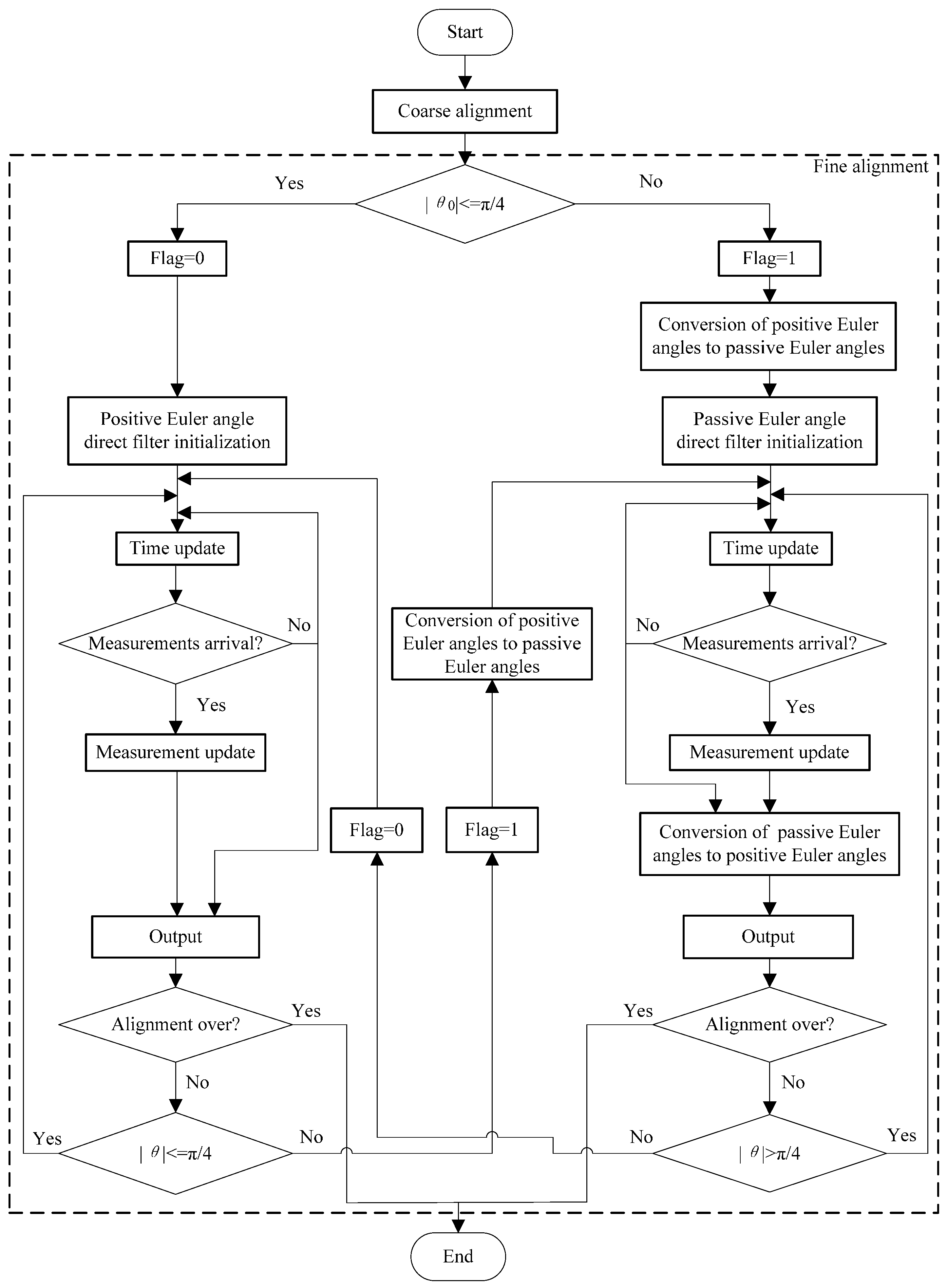
5. Singularity Problem
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bristeau, P.J.; Petit, N.; Praly, L. Design of a navigation filter by analysis of local observability. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; IEEE: New York, NY, USA, 2010; pp. 1298–1305. [Google Scholar]
- Bristeau, P.J.; Petit, N. Navigation System for Ground Vehicles Using Temporally Interconnected Observers. In Proceedings of the 2011 American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011; IEEE: New York, NY, USA, 2011; pp. 1260–1267. [Google Scholar]
- Seo, J.; Lee, H.K.; Lee, J.G.; Park, C.G. Lever arm compensation for GPS/INS/odometer integrated system. Int. J. Control. Autom. 2006, 4, 247–254. [Google Scholar]
- Kim, S.B.; Bazin, J.C.; Lee, H.K.; Choi, K.H.; Park, S.Y. Ground vehicle navigation in harsh urban conditions by integrating inertial navigation system, global positioning system, odometer and vision data. IET Radar Sonar Navig. 2011, 5, 814–823. [Google Scholar] [CrossRef]
- Hegrenaes, O.; Hallingstad, O. Model-aided INS with sea current estimation for robust underwater navigation. IEEE J. Ocean. Eng. 2011, 36, 316–337. [Google Scholar] [CrossRef]
- Liu, X.X.; Xu, X.S.; Liu, Y.T.; Wang, L.H. Kalman filter for cross-noise in the integration of SINS and DVL. Math. Probl. Eng. 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Zhao, L.; Qiu, H.Y.; Feng, Y.M. Analysis of a robust Kalman filter in loosely coupled GPS/INS navigation system. Measurement 2016, 80, 138–147. [Google Scholar] [CrossRef]
- St-Pierre, M.; Gingras, D. Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system. In Proceedings of the 2004 IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; IEEE: New York, NY, USA, 2004; pp. 831–835. [Google Scholar]
- Gong, X.L.; Fan, W.; Fang, J.C. An innovational transfer alignment method based on parameter identification UKF for airborne distributed POS. Measurement 2014, 58, 103–114. [Google Scholar] [CrossRef]
- Enkhtur, M.; Cho, S.Y.; Kim, K.H. Modified unscented Kalman filter for a multirate INS/GPS integrated navigation system. ETRI J. 2013, 35, 943–946. [Google Scholar] [CrossRef]
- Cheng, J.H.; Chen, D.D.; Landry, R.J.; Zhao, L.; Guan, D.X. An adaptive unscented Kalman filtering algorithm for MEMS/GPS integrated navigation systems. J. Appl. Math. 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Li, W.L.; Wang, J.L.; Lu, L.Q.; Wu, W.Q. A novel scheme for DVL-aided SINS in-motion alignment using UKF techniques. Sensors 2013, 13, 1046–1063. [Google Scholar] [CrossRef] [PubMed]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Qi, H.H.; Moore, J.B. Direct Kalman filtering approach for GPS/INS integration. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 687–693. [Google Scholar]
- Choukroun, D.; Bar-Itzhack, I.Y.; Oshman, Y. Novel quaternion Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 174–190. [Google Scholar] [CrossRef]
- Jiang, Y.F.; Xie, B.; Weng, J. SINS in-motion alignment and position determination for land-vehicle based on quaternion Kalman filter. In Proceedings of the Chinese Control Conference (CCC), Xi’an, China, 26–28 July 2013; IEEE: New York, NY, USA, 2013; pp. 5083–5088. [Google Scholar]
- Zhang, P.F.; Gu, J.; Milios, E.E.; Huynh, P. Navigation with IMU/GPS/digital compass with unscented Kalman filter. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; IEEE: New York, NY, USA, 2005; pp. 1497–1502. [Google Scholar]
- Kraft, E. A quaternion-based unscented Kalman filter for orientation tracking. In Proceedings of the Sixth International Conference of Information Fusion, Queensland, Australia, 8–11 July 2003; International Society Information Fusion: Sunnyvale, CA, USA, 2003; pp. 47–54. [Google Scholar]
- Shin, E.H.; El-Sheimy, N. An unscented Kalman filter for in-motion alignment of low-cost IMUs. In Proceedings of the 2004 Position Location and Navigation Symposium (PLANS 2004), Monterey, CA, USA, 26–29 April 2004; IEEE: New York, NY, USA, 2004; pp. 273–279. [Google Scholar]
- Khoder, W.; Fassinut-Mombot, B.; Benjelloun, M. Quaternion unscented Kalman filtering for integrated inertial navigation and GPS. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008.
- Van Merwe, R.D.; Wan, E.A.; Julier, S.I. Sigma-point Kalman filters for nonlinear estimation and sensor-fusion—Applications to integrated navigation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Reston, VA, USA, 16–19 August 2004; pp. 1735–1764.
- Julier, S.J.; LaViola, J.J. On Kalman filtering with nonlinear equality constraints. IEEE Trans. Signal Proc. 2007, 55, 2774–2784. [Google Scholar] [CrossRef]
- Crassidis, J.L. Sigma-Point Kalman filtering for integrated GPS and inertial navigation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 750–756. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Goodall, C. Vehicle navigator using a mixture particle filter for inertial sensors/odometer/map data/GPS integration. IEEE Trans. Consum. Electr. 2012, 58, 544–552. [Google Scholar] [CrossRef]
- Shabani, M.; Gholami, A.; Davari, N. Asynchronous direct Kalman filtering approach for underwater integrated navigation system. Nonlinear Dyn. 2015, 80, 71–85. [Google Scholar] [CrossRef]
- Shuster, M.D. A survey of attitude representations. J. Astronaut. Sci. 1993, 41, 439–517. [Google Scholar]
- Schaub, H.; Junkins, J.L. Stereographic orientation parameters for attitude dynamics: A generalization of the Rodrigues parameters. J. Astronaut. Sci. 1996, 44, 1–19. [Google Scholar]
- Singla, P.; Mortari, D.; Junkins, J.L. How to avoid singularity when using Euler angles. In Proceedings of the AAS/AIAA 14th Space Flight Mechanics Meeting, Maui County, HI, USA, 8–12 February 2004; Univelt Inc.: San Diego, CA, USA, 2004; pp. 1409–1426. [Google Scholar]
- Mortari, D.; Angelucci, M.; Markley, F.L. Singularity and attitude estimation. In Proceedings of the AAS/AIAA 10th Space Flight Mechanics Meeting, Clearwater, FL, USA, 23–26 June 2000; Univelt Inc.: San Diego, CA, USA, 2000; pp. 479–493. [Google Scholar]
- Qun, L.H.; Hou, S. Research on control aircraft trajectory in simulating game scene based on the doubler Euler method. J. Appl. Sci. 2013, 13, 2868–2875. [Google Scholar] [CrossRef]
- Wu, B.; Chen, P.; Hu, Y.J.; Wang, C.L. Research on attitude singularity problem of small tail-sitter aircraft. In Proceedings of the 4th International Conference on Frontiers of Manufacturing Science and Measuring Technology (ICFMM 2014), Guilin, China, 19–20 June 2014; pp. 401–404.
- Yoon, S. A study on optimal switching angles in dual-Euler method. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002.
- Miller, P.A.; Farrell, J.A.; Zhao, Y.Y.; Djapic, V. Autonomous underwater vehicle navigation. IEEE J. Ocean. Eng. 2010, 35, 663–678. [Google Scholar] [CrossRef]
- Morgado, M.; Oliveira, P.; Silvestre, C. Tightly coupled ultrashort baseline and inertial navigation system for underwater vehicles: An experimental validation. J. Field Robot. 2013, 30, 142–170. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
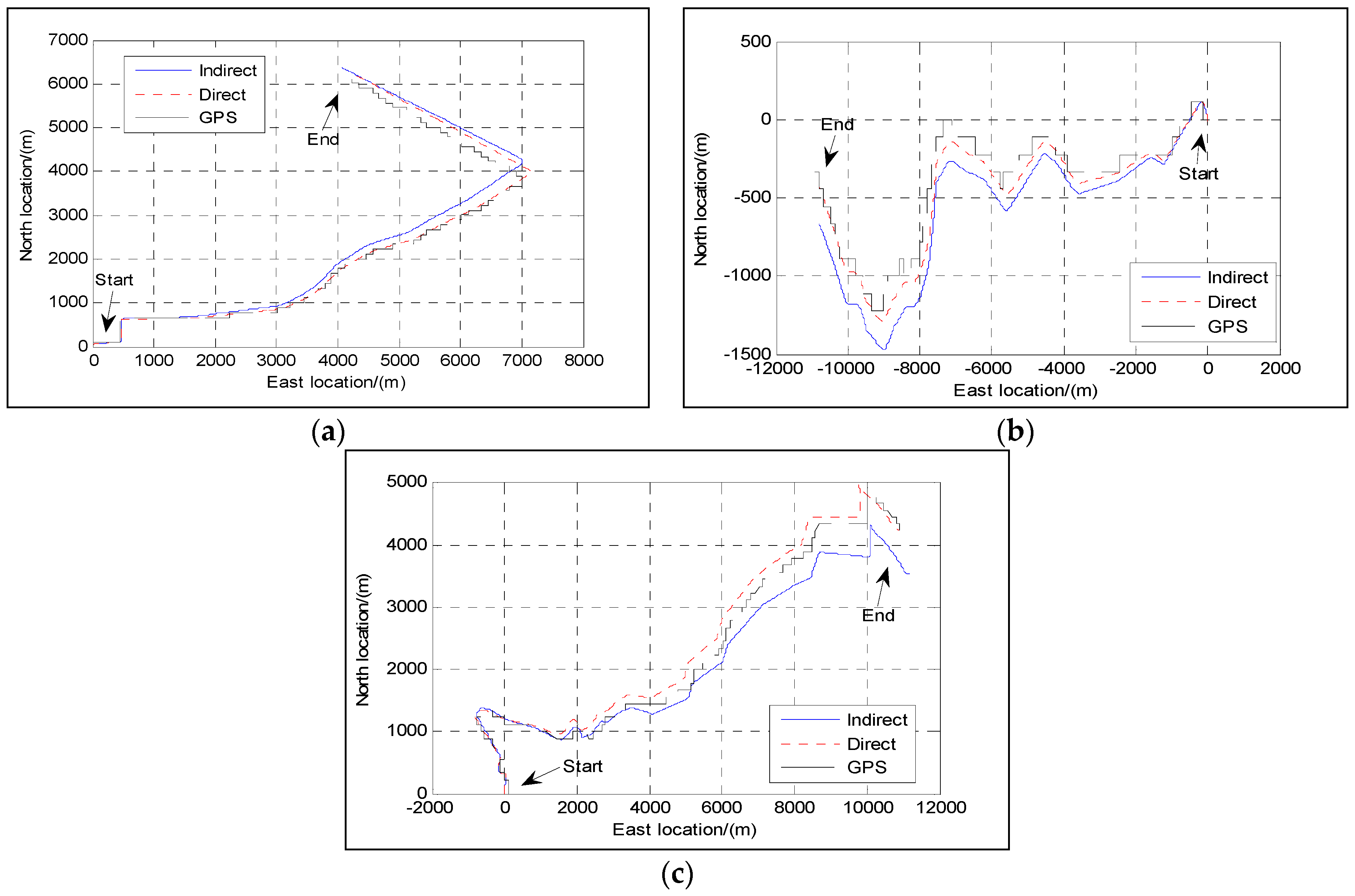
| Parameter | Trajectory 1 | Trajectory 2 | Trajectory 3 |
|---|---|---|---|
| Time (min) | 25 | 30 | 30 |
| Distance (km) | 11.4 | 10.6 | 14.3 |
| Error | Trajectory 1 | Trajectory 2 | Trajectory 3 |
|---|---|---|---|
| Direct | 1.4% | 1.58% | 2.36% |
| Indirect | 2.5% | 3.12% | 3.9% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ran, C.; Cheng, X. A Direct and Non-Singular UKF Approach Using Euler Angle Kinematics for Integrated Navigation Systems. Sensors 2016, 16, 1415. https://doi.org/10.3390/s16091415
Ran C, Cheng X. A Direct and Non-Singular UKF Approach Using Euler Angle Kinematics for Integrated Navigation Systems. Sensors. 2016; 16(9):1415. https://doi.org/10.3390/s16091415
Chicago/Turabian StyleRan, Changyan, and Xianghong Cheng. 2016. "A Direct and Non-Singular UKF Approach Using Euler Angle Kinematics for Integrated Navigation Systems" Sensors 16, no. 9: 1415. https://doi.org/10.3390/s16091415
APA StyleRan, C., & Cheng, X. (2016). A Direct and Non-Singular UKF Approach Using Euler Angle Kinematics for Integrated Navigation Systems. Sensors, 16(9), 1415. https://doi.org/10.3390/s16091415