
Deep Neural Network for the Detections of Fall and Physical Activities Using Foot Pressures and Inertial Sensing


Abstract
1. Introduction
2. Materials and Methods
2.1. Subjects and Experimental Activities
- (1)
- A backward fall during stand-to-sit.
- (2)
- A forward fall, a lateral fall toward the left side, and a lateral fall toward the right side during walking.
- (3)
- A forward fall, a lateral fall toward the left side, and a lateral fall toward the right side from standing.
- (4)
- A forward fall, a lateral fall toward the left side, and a lateral fall toward the right side during sit-to-stand.
- (1)
- A single jump and a continuous jump.
- (2)
- A forward jog at an expected speed of 1.6 m/s and jogging in place with an expected time interval of 1.5 s.
- (3)
- Forward walking at two expected speeds (0.8 and 1.3 m/s), walking backward, and walking in place with an expected time interval of 2 s on level ground.
- (4)
- Walking downstairs.
- (5)
- Walking upstairs.
- (6)
- Sitting straight and sitting with legs stretched out.
- (7)
- Standing still, standing with hands raising, and standing with body swing in anteroposterior/left-right/up-down direction.
2.2. Sensing and Recording System
2.3. Fall and PA Detection Network
- (1)
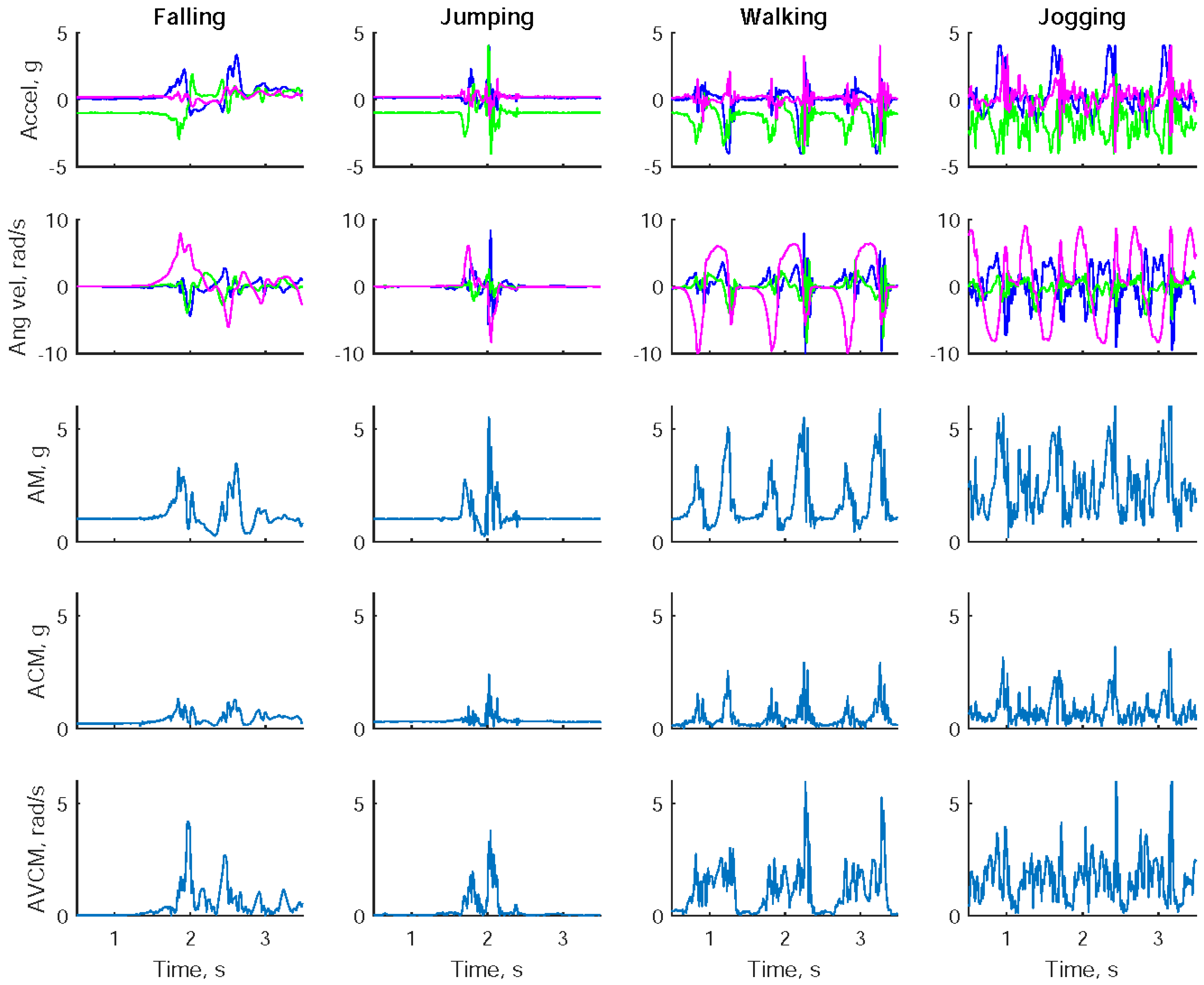
- Tri-axial accelerations: ax(i), ay(i), az(i)
- (2)
- Tri-axial angular velocities: ωx(i), ωy(i), ωz(i)
- (3)
- Acceleration amplitude (AM) defined as the square root of the sum of tri-axial accelerations [32]:
- (4)
- Acceleration cubic-product-root magnitude (ACM) defined as the cube root of the product of tri-axial absolute accelerations [44]:
- (5)
- Angular velocity cubic-product-root magnitude (AVCM) defined as the cube root of the product of tri-axial absolute angular velocities [44]:
- (1)
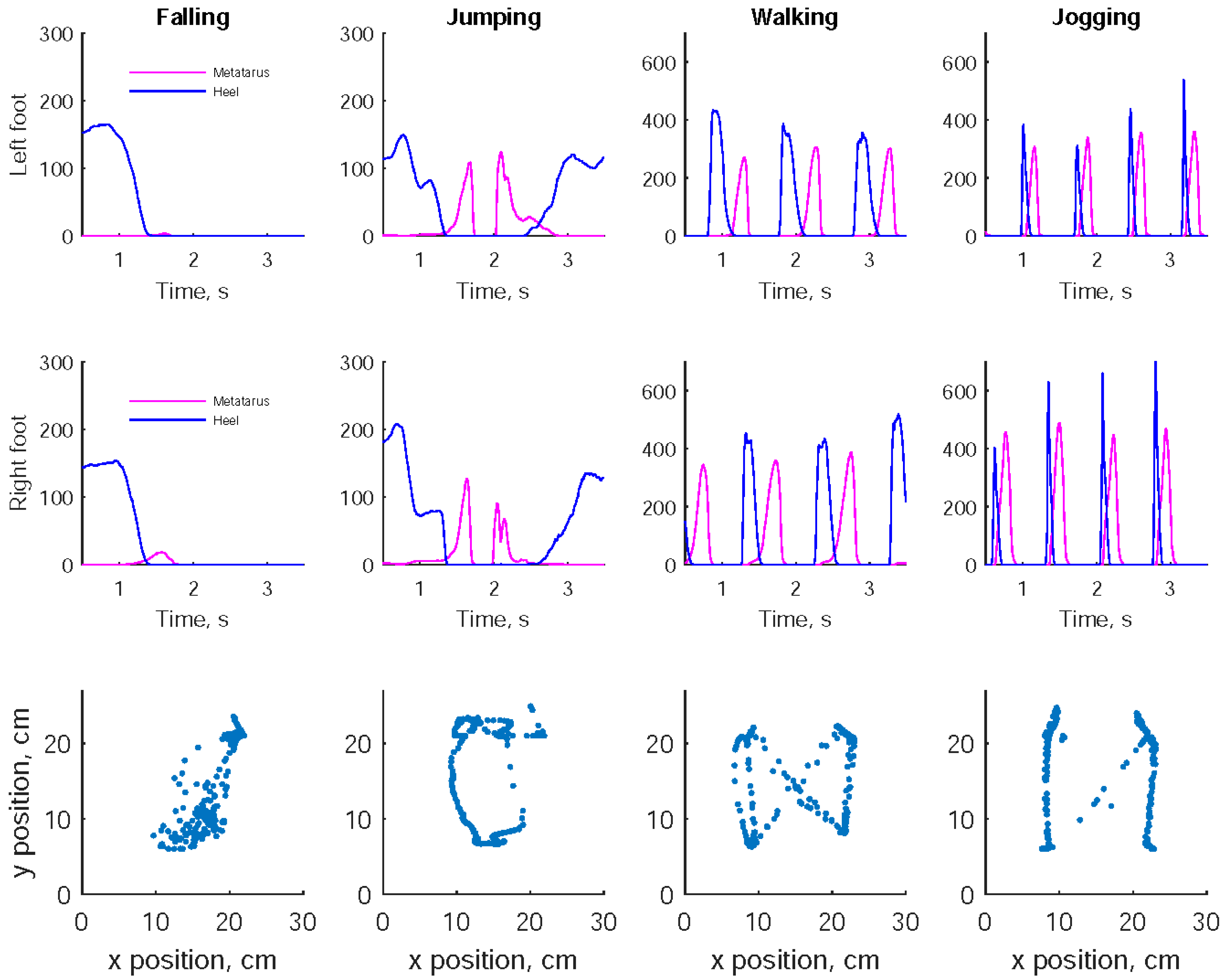
- Eleven individual foot pressures: fp1(i), fp2(i), …, fp11(i)
- (2)
- CoP in horizontal direction (CoPx)
- (3)
- CoP in vertical direction (CoPy)
- (1)
- A batch size of 96 to achieve a balance between the robustness of stochastic gradient descent and the efficiency of batch gradient descent.
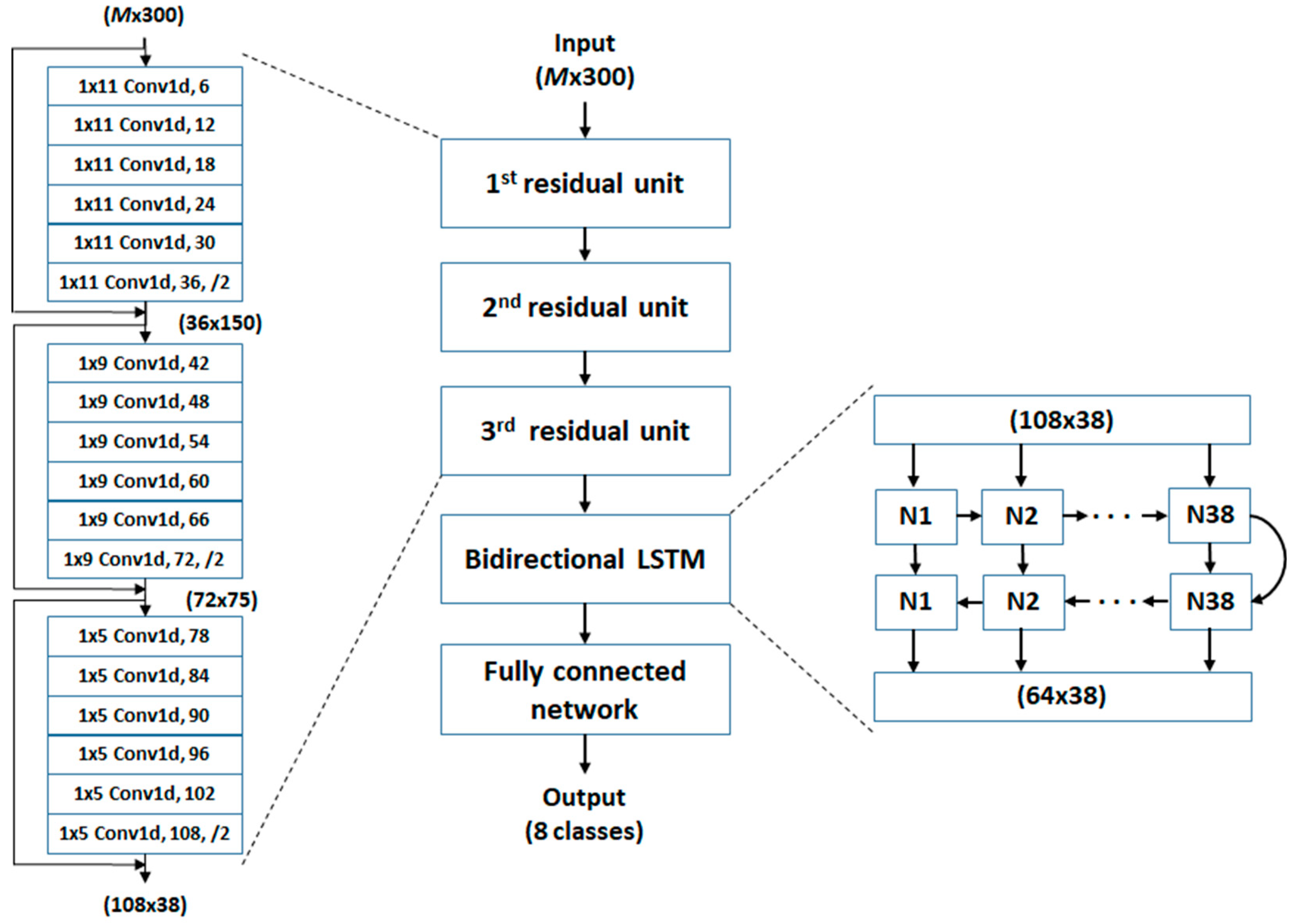
- (2)
- Three RUs to extract low-, middle-, and high-level features from signals: 1D convolutions with a kernel size of 11 in the first RU to capture the temporal patterns of signals (~110 ms), 9 in the second RU to capture the low-level temporal features, and 5 in the third RU to aggregate the middle-level features.
- (3)
- 36, 72, and 108 feature maps to generate sufficient low-, middle- and high-level features.
- (4)
- Two sequential 64-unit LSTM cells to cluster the high-level features at various time points.
- (5)
- A fully connected network containing a hidden layer of 32 neurons to aggregate the last-state short-term vectors and an output layer of 8 neurons to classify falls and 7 types of PAs.
2.4. Network Training and Testing
- (1)
- Several 3-s fall segments were obtained by choosing various onset times at 0, 0.5, 1, and 1.5 s and four additional multiples by randomly shifting the onset time within the three intervals (0–0.5 s, 0.5–1 s, 1–1.5 s). Therefore, a total of 3 × 10 × 16 segments (10 falls, each fall had 3 trials, 16-time data augmentation) were obtained from each participant and labeled as falls (class 0).
- (2)
- Several 3-s PA segments were obtained by choosing various onset times at 0, 0.5, 1, and 1.5 s and four additional multiples by randomly shifting the onset time within three intervals (0–0.5 s, 0.5–1 s, 1–1.5 s). The number of the augmented segments depended on the type of PA such that a total of 3 × 160 segments (each movement had 3 trials) were obtained from each PA for each participant and labeled as a specific PA (class 1 to class 7). Therefore, an evenly balanced dataset between falls and various types of PA was generated.
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, C.-C.; Hsu, Y.-L. A review of accelerometry-based wearable motion detectors for physical activity monitoring. Sensors 2010, 10, 7772–7788. [Google Scholar] [CrossRef] [PubMed]
- Bet, P.; Castro, P.C.; Ponti, M.A. Fall detection and fall risk assessment in older person using wearable sensors: A systematic review. Int. J. Med. Inform. 2019, 130, 103946. [Google Scholar] [CrossRef]
- Bauman, A.; Merom, D.; Bull, F.C.; Buchner, D.M.; Fiatarone Singh, M.A. Updating the evidence for physical activity: Summative reviews of the epidemiological evidence, prevalence, and interventions to promote “active aging”. Gerontol. 2016, 56, S268–S280. [Google Scholar] [CrossRef] [PubMed]
- Schrack, J.A.; Gresham, G.; Wanigatunga, A.A. Understanding physical activity in cancer patients and survivors: New methodology, new challenges, and new opportunities. Cold Spring Harb. Mol. Case Stud. 2017, 3, a001933. [Google Scholar] [CrossRef] [PubMed]
- Šimaitytė, M.; Petrėnas, A.; Kravčenko, J.; Kaldoudi, E.; Marozas, V. Objective evaluation of physical activity pattern using smart devices. Sci. Rep. 2019, 9, 2006. [Google Scholar] [CrossRef]
- Kosk, K.; Luukinen, H.; Laippala, P.; KivelÄ, S.-L. Physiological factors and medications as predictors of injurious falls by elderly people: A prospective population-based study. Age Ageing 1996, 25, 29–38. [Google Scholar] [CrossRef]
- Allen, N.E.; Schwarzel, A.K.; Canning, C.G. Recurrent falls in Parkinson’s disease: A systematic review. Park. Dis. 2013, 2013, 906274. [Google Scholar] [CrossRef]
- Giannì, C.; Prosperini, L.; Jonsdottir, J.; Cattaneo, D. A systematic review of factors associated with accidental falls in people with multiple sclerosis: A meta-analytic approach. Clin. Rehabil. 2014, 28, 704–716. [Google Scholar] [CrossRef]
- Batchelor, F.A.; Mackintosh, S.F.; Said, C.M.; Hill, K.D. Falls after stroke. Int. J. Stroke 2012, 7, 482–490. [Google Scholar] [CrossRef]
- Vellas, B.J.; Wayne, S.J.; Romero, L.J.; Baumgartner, R.N.; Garry, P.J. Fear of falling and restriction of mobility in elderly fallers. Age Ageing 1997, 26, 189–193. [Google Scholar] [CrossRef]
- Auais, M.; French, S.; Alvarado, B.; Pirkle, C.; Belanger, E.; Guralnik, J. Fear of falling predicts incidence of functional disability 2 years later: A perspective from an international cohort study. J. Gerontol. Ser. A 2018, 73, 1212–1215. [Google Scholar] [CrossRef] [PubMed]
- Jonasson, S.B.; Nilsson, M.H.; Lexell, J.; Carlsson, G. Experiences of fear of falling in persons with Parkinson’s disease—A qualitative study. BMC Geriatr. 2018, 18, 44. [Google Scholar] [CrossRef] [PubMed]
- Blaschke, C.M.; Freddolino, P.P.; Mullen, E.E. Ageing and technology: A review of the research literature. Br. J. Soc. Work 2009, 39, 641–656. [Google Scholar] [CrossRef]
- Williams, V.; Victor, C.R.; McCrindle, R. It is always on your mind: Experiences and perceptions of falling of older people and their carers and the potential of a mobile falls detection device. Curr. Gerontol. Geriatr. Res. 2013, 2013, 295073. [Google Scholar] [CrossRef][Green Version]
- Gutiérrez, J.; Rodríguez, V.; Martin, S. Comprehensive review of vision-based fall detection systems. Sensors 2021, 21, 947. [Google Scholar] [CrossRef]
- Clark, R.A.; Mentiplay, B.F.; Hough, E.; Pua, Y.H. Three-dimensional cameras and skeleton pose tracking for physical function assessment: A review of uses, validity, current developments and Kinect alternatives. Gait Posture 2019, 68, 193–200. [Google Scholar] [CrossRef]
- Kwolek, B.; Kepski, M. Human fall detection on embedded platform using depth maps and wireless accelerometer. Comput. Methods Programs Biomed. 2014, 117, 489–501. [Google Scholar] [CrossRef]
- Doukas, C.N.; Maglogiannis, I. Emergency fall incidents detection in assisted living environments utilizing motion, sound, and visual perceptual components. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 277–289. [Google Scholar] [CrossRef]
- Shieh, W.-Y.; Huang, J.-C. Falling-incident detection and throughput enhancement in a multi-camera video-surveillance system. Med. Eng. Phys. 2012, 34, 954–963. [Google Scholar] [CrossRef]
- De Miguel, K.; Brunete, A.; Hernando, M.; Gambao, E. Home camera-based fall detection system for the elderly. Sensors 2017, 17, 2864. [Google Scholar] [CrossRef]
- Stone, E.E.; Skubic, M. Fall detection in homes of older adults using the Microsoft Kinect. IEEE J. Biomed. Health Inform. 2015, 19, 290–301. [Google Scholar] [CrossRef] [PubMed]
- Lu, N.; Wu, Y.; Feng, L.; Song, J. Deep Learning for fall detection: Three-dimensional CNN combined with LSTM on video kinematic data. IEEE J. Biomed. Health Inform. 2019, 23, 314–323. [Google Scholar] [CrossRef] [PubMed]
- Sultana, A.; Deb, K.; Dhar, P.K.; Koshiba, T. Classification of indoor human fall events using deep learning. Entropy 2021, 23, 328. [Google Scholar] [CrossRef]
- Lee, P.; Chen, T.-B.; Liu, C.-H.; Wang, C.-Y.; Huang, G.-H.; Lu, N.-H. Identifying the posture of young adults in walking videos by using a fusion artificial intelligent method. Biosensors 2022, 12, 295. [Google Scholar] [CrossRef]
- Kwapisz, J.R.; Weiss, G.M.; Moore, S.A. Activity recognition using cell phone accelerometers. ACM SigKDD Explor. Newsl. 2011, 12, 74–82. [Google Scholar] [CrossRef]
- Micucci, D.; Mobilio, M.; Napoletano, P. UniMiB SHAR: A dataset for human activity recognition using acceleration data from smartphones. Appl. Sci. 2017, 7, 1101. [Google Scholar] [CrossRef]
- Sztyler, T.; Stuckenschmidt, H. On-body localization of wearable devices: An investigation of position-aware activity recognition. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communications (PerCom), Sydney, Australia, 14–19 March 2016; pp. 1–9. [Google Scholar]
- Zhang, M.; Sawchuk, A.A. USC-HAD: A daily activity dataset for ubiquitous activity recognition using wearable sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 1036–1043. [Google Scholar]
- Chavarriaga, R.; Sagha, H.; Calatroni, A.; Digumarti, S.T.; Tröster, G.; Millán, J.d.R.; Roggen, D. The Opportunity challenge: A benchmark database for on-body sensor-based activity recognition. Pattern Recognit. Lett. 2013, 34, 2033–2042. [Google Scholar] [CrossRef]
- Garcia-Gonzalez, D.; Rivero, D.; Fernandez-Blanco, E.; Luaces, M.R. A public domain dataset for real-life human activity recognition using smartphone sensors. Sensors 2020, 20, 2200. [Google Scholar] [CrossRef]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A public domain dataset for human activity recognition using smartphones. In Proceedings of the European Symposium on Artificial Neural Networks, Bruges, Belgium, 24–26 April 2013. [Google Scholar]
- Karantonis, D.M.; Narayanan, M.R.; Mathie, M.; Lovell, N.H.; Celler, B.G. Implementation of a real-time human movement classifier using a triaxial accelerometer for ambulatory monitoring. IEEE Trans. Inf. Technol. Biomed. 2006, 10, 156–167. [Google Scholar] [CrossRef]
- Bourke, A.K.; O’Brien, J.V.; Lyons, G.M. Evaluation of a threshold-based tri-axial accelerometer fall detection algorithm. Gait Posture 2007, 26, 194–199. [Google Scholar] [CrossRef]
- Ojetola, O.; Gaura, E.I.; Brusey, J. Data set for fall events and daily activities from inertial sensors. In Proceedings of the 6th ACM Multimedia Systems Conference, MMSys 2015, Portland, OR, USA, 18–20 March 2015; pp. 243–248. [Google Scholar]
- Medrano, C.; Igual, R.; Plaza, I.; Castro, M. Detecting falls as novelties in acceleration patterns acquired with smartphones. PLoS ONE 2014, 9, e94811. [Google Scholar] [CrossRef] [PubMed]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. SisFall: A fall and movement dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef]
- Vavoulas, G.; Pediaditis, M.; Spanakis, E.G.; Tsiknakis, M. The MobiFall dataset: An initial evaluation of fall detection algorithms using smartphones. In Proceedings of the 13th IEEE International Conference on BioInformatics and BioEngineering, Chania, Greece, 10–13 November 2013; pp. 1–4. [Google Scholar]
- Kangas, M.; Konttila, A.; Lindgren, P.; Winblad, I.; Jämsä, T. Comparison of low-complexity fall detection algorithms for body attached accelerometers. Gait Posture 2008, 28, 285–291. [Google Scholar] [CrossRef]
- Chao, P.-K.; Chan, H.-L.; Tang, F.-T.; Chen, Y.-C.; Wong, M.-K. A comparison of automatic fall detection by the cross-product and magnitude of tri-axial acceleration. Physiol. Meas. 2009, 30, 1027–1037. [Google Scholar] [CrossRef]
- Bourke, A.K.; van de Ven, P.; Gamble, M.; O’Connor, R.; Murphy, K.; Bogan, E.; McQuade, E.; Finucane, P.; ÓLaighin, G.; Nelson, J. Evaluation of waist-mounted tri-axial accelerometer based fall-detection algorithms during scripted and continuous unscripted activities. J. Biomech. 2010, 43, 3051–3057. [Google Scholar] [CrossRef] [PubMed]
- Casilari, E.; Santoyo-Ramón, J.A.; Cano-García, J.M. Analysis of a smartphone-based architecture with multiple mobility sensors for fall detection. PLoS ONE 2016, 11, e0168069. [Google Scholar] [CrossRef]
- Nyan, M.N.; Tay, F.E.H.; Tan, A.W.Y.; Seah, K.H.W. Distinguishing fall activities from normal activities by angular rate characteristics and high-speed camera characterization. Med. Eng. Phys. 2006, 28, 842–849. [Google Scholar] [CrossRef]
- Bourke, A.K.; Lyons, G.M. A threshold-based fall-detection algorithm using a bi-axial gyroscope sensor. Med. Eng. Phys. 2008, 30, 84–90. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.-T.; Chan, H.-L.; Hsu, M.-H.; Lin, C.-K.; Chao, P.-K.; Chang, Y.-J. Threshold-based fall detection using a hybrid of tri-axial accelerometer and gyroscope. Physiol. Meas. 2018, 39, 105002. [Google Scholar] [CrossRef] [PubMed]
- Santos, G.L.; Endo, P.T.; Monteiro, K.H.; Rocha, E.D.; Silva, I.; Lynn, T. Accelerometer-based human fall detection using convolutional neural networks. Sensors 2019, 19, 1644. [Google Scholar] [CrossRef]
- Ribeiro, N.F.; André, J.; Costa, L.; Santos, C.P. Development of a strategy to predict and detect falls using wearable sensors. J. Med. Syst. 2019, 43, 134. [Google Scholar] [CrossRef] [PubMed]
- Casilari, E.; Lora-Rivera, R.; García-Lagos, F. A Study on the application of convolutional neural networks to fall detection evaluated with multiple public datasets. Sensors 2020, 20, 1466. [Google Scholar] [CrossRef] [PubMed]
- Qi, W.; Su, H.; Yang, C.; Ferrigno, G.; De Momi, E.; Aliverti, A. A fast and robust deep convolutional neural networks for complex human activity recognition using smartphone. Sensors 2019, 19, 3731. [Google Scholar] [CrossRef] [PubMed]
- Almaslukh, B.; Artoli, A.M.; Al-Muhtadi, J. A robust deep learning approach for position-independent smartphone-based human activity recognition. Sensors 2018, 18, 3726. [Google Scholar] [CrossRef] [PubMed]
- Avilés-Cruz, C.; Ferreyra-Ramírez, A.; Zúñiga-López, A.; Villegas-Cortéz, J. Coarse-fine convolutional deep-learning strategy for human activity recognition. Sensors 2019, 19, 1556. [Google Scholar] [CrossRef]
- Russell, B.; McDaid, A.; Toscano, W.; Hume, P. Moving the Lab into the mountains: A pilot study of human activity recognition in unstructured environments. Sensors 2021, 21, 654. [Google Scholar] [CrossRef]
- Huang, J.; Lin, S.; Wang, N.; Dai, G.; Xie, Y.; Zhou, J. TSE-CNN: A two-stage end-to-end CNN for human activity recognition. IEEE J. Biomed. Health Inform. 2020, 24, 292–299. [Google Scholar] [CrossRef]
- Mauldin, T.R.; Canby, M.E.; Metsis, V.; Ngu, A.H.H.; Rivera, C.C. SmartFall: A smartwatch-based fall detection system using deep learning. Sensors 2018, 18, 3363. [Google Scholar] [CrossRef]
- Luna-Perejón, F.; Domínguez-Morales, M.J.; Civit-Balcells, A. Wearable fall detector using recurrent neural networks. Sensors 2019, 19, 4885. [Google Scholar] [CrossRef]
- Murad, A.; Pyun, J.-Y. Deep recurrent neural networks for human activity recognition. Sensors 2017, 17, 2556. [Google Scholar] [CrossRef]
- Delgado-Escaño, R.; Castro, F.M.; Cózar, J.R.; Marín-Jiménez, M.J.; Guil, N.; Casilari, E. A cross-dataset deep learning-based classifier for people fall detection and identification. Comput. Methods Programs Biomed. 2020, 184, 105265. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Hou, Y.; He, J.; Lungu, J.; Dong, R. An energy-efficient fall detection method based on FD-DNN for elderly people. Sensors 2020, 20, 4192. [Google Scholar] [CrossRef] [PubMed]
- Theodoridis, T.; Solachidis, V.; Vretos, N.; Daras, P. Human fall detection from acceleration measurements using a recurrent neural network. In Proceedings of the Precision Medicine Powered by pHealth and Connected Health, Thessaloniki, Greece, 10–13 November 2017; pp. 145–149. [Google Scholar]
- Fridriksdottir, E.; Bonomi, A.G. Accelerometer-based human activity recognition for patient monitoring using a deep neural network. Sensors 2020, 20, 6424. [Google Scholar] [CrossRef]
- Ankita; Rani, S.; Babbar, H.; Coleman, S.; Singh, A.; Aljahdali, H.M. An efficient and lightweight deep learning model for human activity recognition using smartphones. Sensors 2021, 21, 3845. [Google Scholar] [CrossRef] [PubMed]
- Nafea, O.; Abdul, W.; Muhammad, G.; Alsulaiman, M. Sensor-based human activity recognition with spatio-temporal deep learning. Sensors 2021, 21, 2141. [Google Scholar] [CrossRef]
- Chen, W.-H.; Lee, Y.-S.; Yang, C.-J.; Chang, S.-Y.; Shih, Y.; Sui, J.-D.; Chang, T.-S.; Shiang, T.-Y. Determining motions with an IMU during level walking and slope and stair walking. J. Sport. Sci. 2020, 38, 62–69. [Google Scholar] [CrossRef]
- Moufawad el Achkar, C.; Lenoble-Hoskovec, C.; Paraschiv-Ionescu, A.; Major, K.; Büla, C.; Aminian, K. Instrumented shoes for activity classification in the elderly. Gait Posture 2016, 44, 12–17. [Google Scholar] [CrossRef]
- Zitouni, M.; Pan, Q.; Brulin, D.; Campo, E. Design of a smart sole with advanced fall detection algorithm. J. Sens. Technol. 2019, 9, 71–90. [Google Scholar] [CrossRef]
- Lee, C.M.; Park, J.; Park, S.; Kim, C.H. Fall-detection algorithm using plantar pressure and acceleration data. Int. J. Precis. Eng. Manuf. 2020, 21, 725–737. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. arXiv:1412.6980. [Google Scholar]
- Zhang, H.; Zanotto, D.; Agrawal, S.K. Estimating CoP trajectories and kinematic gait parameters in walking and running using instrumented insoles. IEEE Robot. Autom. Lett. 2017, 2, 2159–2165. [Google Scholar] [CrossRef]
- Lin, C.-W.; Ruan, S.-J.; Hsu, W.-C.; Tu, Y.-W.; Han, S.-L. Optimizing the sensor placement for foot plantar center of pressure without prior knowledge using deep reinforcement learning. Sensors 2020, 20, 5588. [Google Scholar] [CrossRef] [PubMed]
- Choi, A.; Jung, H.; Lee, K.Y.; Lee, S.; Mun, J.H. Machine learning approach to predict center of pressure trajectories in a complete gait cycle: A feedforward neural network vs. LSTM network. Med. Biol. Eng. Comput. 2019, 57, 2693–2703. [Google Scholar] [CrossRef] [PubMed]
- Lakshmanna, K.; Kaluri, R.; Gundluru, N.; Alzamil, Z.S.; Rajput, D.S.; Khan, A.A.; Haq, M.A.; Alhussen, A. A review on deep learning techniques for IoT data. Electronics 2022, 11, 1604. [Google Scholar] [CrossRef]
- Manogaran, G.; Shakeel, P.M.; Fouad, H.; Nam, Y.; Baskar, S.; Chilamkurti, N.; Sundarasekar, R. Wearable IoT smart-log patch: An edge computing-based Bayesian deep learning network system for multi access physical monitoring system. Sensors 2019, 19, 3030. [Google Scholar] [CrossRef]
- Stavropoulos, T.G.; Papastergiou, A.; Mpaltadoros, L.; Nikolopoulos, S.; Kompatsiaris, I. IoT wearable sensors and devices in elderly care: A literature review. Sensors 2020, 20, 2826. [Google Scholar] [CrossRef]
- Zulkifli, S.S.; Loh, W.P. A state-of-the-art review of foot pressure. Foot Ankle Surg. 2020, 26, 25–32. [Google Scholar] [CrossRef]
- Zheng, Q.; Yang, M.; Yang, J.; Zhang, Q.; Zhang, X. Improvement of generalization ability of deep CNN via implicit regularization in two-stage training process. IEEE Access 2018, 6, 15844–15869. [Google Scholar] [CrossRef]
- Jin, B.; Cruz, L.; Gonçalves, N. Pseudo RGB-D face recognition. IEEE Sens. J. 2022, 22, 21780–21794. [Google Scholar] [CrossRef]
- Yao, T.; Qu, C.; Liu, Q.; Deng, R.; Tian, Y.; Xu, J.; Jha, A.; Bao, S.; Zhao, M.; Fogo, A.B.; et al. Compound figure separation of biomedical images with side loss. In Proceedings of the Deep Generative Models, and Data Augmentation, Labelling, and Imperfections, Strasbourg, France, 1 October 2021; pp. 173–183. [Google Scholar]
- Srivastava, N.; Hinton, G.E.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R.J.J.M.L.R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Zhao, M.; Jha, A.; Liu, Q.; Millis, B.A.; Mahadevan-Jansen, A.; Lu, L.; Landman, B.A.; Tyska, M.J.; Huo, Y. Faster Mean-shift: GPU-accelerated clustering for cosine embedding-based cell segmentation and tracking. Med. Image Anal. 2021, 71, 102048. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. In Classic Works of the Dempster-Shafer Theory of Belief Functions; Yager, R.R., Liu, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 57–72. [Google Scholar]
- Yu, Y.; Samali, B.; Rashidi, M.; Mohammadi, M.; Nguyen, T.N.; Zhang, G. Vision-based concrete crack detection using a hybrid framework considering noise effect. J. Build. Eng. 2022, 61, 105246. [Google Scholar] [CrossRef]
- Högger, A. Dempster Shafer Sensor Fusion for Autonomously Driving Vehicles: Association Free Tracking of Dynamic Objects. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2016. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Dataset/ Subject No. | Sensor | Placement | Feature | Model | PA Type | Accuracy |
|---|---|---|---|---|---|---|---|
| Kwapisz et al. [25] | WISDM/29 | A | leg | statistical features | MLP | jog, stand, sit, walk, stairs | 0.917 |
| Micucci et al. [26] | UniMiB-SHAR/30 | A | thigh | signals | kNN | jump, jog, lay down, stand up, sit down, walk, stairs | 0.830 |
| Anguita et al. [31] | UCI HAR/30 | A, G | waist | time and freq features | SVM | lay, stand, sit, walk, stairs | F1 = 0.960 |
| Sztyler & Stuckenschmidt [27] | Realworld HAR/15 | A | chest, head, waist, arm, thigh, shin | time and freq features | RF | jump, jog, lay, stand, sit, walk, stairs | F1 = 0.890 |
| Chavarriaga et al. [29] | 12 | A, G | trunk, arm, knee, foot | principal components | kNN | lay, stand, sit, walk | F1 = 0.850 |
| Garcia-Gonzalez et al. [30] | 15 | A, G | long-term smartphone | statistical features | SVM | inactive, active, walk, drive | 0.744 |
| Moufawad el Achkar et al. [63] | 10 | A, G, B, FP | trunk, thigh, foot | DT | stand, sit, walk, stairs, uphill, downhill | 0.970 | |
| Qi et al. [48] | 20 | A, G, M | waist | principal components | CNN; LSTM | jump, jog, lay, stand, walk, stairs | 0.953; 0.964 |
| Almaslukh et al. [49] | Realworld HAR/15 [27] | A | chest, head, waist, arm, thigh, shin | signals | CNN | jump, jog, lay, stand, sit, walk, stairs | F1 = 0.860 |
| Avilés-Cruz et al. [50] | UCI HAR/30 [31] | A, G | waist | signals | CNN | lay, stand, sit, walk, stairs | 1 |
| Russell et al. [51] | - | A | chest | signals | CNN | lay, sit, walk, climb | 0.982 |
| Huang et al. [52] | WISDM/36 [25] | A | leg | signals | CNN | jog, stand, sit, walk, stairs | F1 = 0.940 |
| Chen et al. [62] | 30 | A, G | foot | signals | CNN | Uphill, downhill, slope, walk, stairs | 0.877 |
| Murad & Pyun [55] | USC HAD/14 [28] | A, G | hip | signals | RNN | jump, jog, lay, stand, sit, walk, stairs | F1 = 0.970 |
| Fridriksdottir & Bonomi [59] | 20 | A | trunk | signals | CNN + LSTM | stand, sit, walk, stairs | F1 = 0.946 |
| Ankita [60] | UCI HAR/30 [31] | A, G | waist | time and freq features | CNN + LSTM | lay, stand, sit, walk, stairs | 0.979 |
| Authors | Dataset/ Subject No. | Sensor | Placement | Feature | Model | Activity of Daily Life | Accuracy |
|---|---|---|---|---|---|---|---|
| Karantonis et al. [32] | 6 | A | waist | AM, posture | empirical | walk, PT | 0.908 |
| Bourke et al. [33] | 20 | A | chest; thigh | AM | Empirical | walk, PT | 1 †; 0.913 † |
| Kangas et al. [38] | 3 | A | waist, wrist, head | AM, posture | empirical | walk, stairs, PT | 0.990 † |
| Chao et al. [39] | 7 | A | chest; thigh | AC, posture | empirical | walk, squat, PT | 0.991 †; 0.996† |
| Bourke et al. [40] | 20 | A | waist | AC, VV, posture | empirical | walk, PT | 1 |
| Sucerquia et al. [36] | SisFall/38 | A | waist | AM | empirical | jump, jog, walk, PT | 0.978 |
| Medrano et al. [35] | DFNAPAS/10 | A | AM | SVM | real-life ADL | 0.939 † | |
| Ojetola et al. [34] | Cognent/32 | A, G | chest | AM | empirical | stand, lay, sit, walk, crouch, PT | F1 = 0.940 |
| Nyan et al. [42] | 10 | G | chest, waist | angular velocity | empirical | walk, PT | 0.987 † |
| Bourke et al. [43] | 20 | G | chest | angular velocity and acceleration | empirical | walk, PT | 1 |
| Casilari et al. [41] | UMAFall/17 | A, G | chest, waist, thigh, wrist | AM, DA, posture | empirical | jump, walk, stairs, PT | 0.886 |
| Wang et al. [44] | 15; Cognent/32 [34]; UMAFall/17 [41] | A, G | chest | AM, ACM, AVCM | empirical | jump, walk, PT; crouch, walk, PT; jump, walk, stairs, PT | 0.991 †; 0.973 †; 0.896 † |
| Zitouni et al. [64] | 6 | A | foot | AM, DA, posture | empirical | stand, lay, sit, walk, sport, PT | 0.966 † |
| Lee et al. [65] | 9 | A, FP | foot | AM, DA, CoP | DT | stand, lay, sit, walk, PT | 0.951 |
| Santos et al. [45] | URFD/5 [17]; SmartFall/7 [53] | A, G | hip; wrist | signals | CNN | lay, sit, walk, crouch; jog, sit, hand move | 0.999; 0.999 |
| Ribeiro et al. [46] | 12 | A, G, M | back, thigh, foot | principal components | CNN | walk | 0.927 |
| Casilari et al. [47] | SisFall/38 [36]; UMAFall/17 [41] | A | waist | AM, accelerations | CNN | jump, jog, walk, PT;jump, walk, stairs, PT | 0.988; 0.821 |
| Mauldin et al. [53] | SmartFall/7 | A | wrist | signals | RNN | jog, sit, hand move | 0.850 |
| Luna-Perejón et al. [54] | SisFall/38 [36] | A | waist | signals | RNN | jump, jog, walk, PT | 0.967 |
| Theodoridis et al. [58] | URFD/5 [17] | A | hip | signals | CNN + LSTM | lay, sit, walk, crouch | 0.986 |
| Delgado-Escaño et al. [56] | DFNAPAS/10 [35]; SisFall/38 [36]; UniMiB-SHAR/30 [26] | A | pocket; waist; thigh | signals | CNN + LSTM | real-life ADL; jump, jog, walk, PT; jump, jog, walk, stairs, PT | 0.997; 0.972; 0.873 |
| Liu [57] | SisFall/38 [36] MobiFall/24 [37] | A, G | waist | signals | CNN + LSTM | jump, jog, walk, stairs | 0.992 |
| Residual Unit (RU)/Layer | The 1st RU Kernel Size 11, Stride 1 | The 2nd RU Kernel Size 9, Stride 1 | The 3rd RU Kernel Size 5, Stride 1 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Input Channel | Output Channel | Size | Input Channel | Output Channel | Size | Input Channel | Output Channel | Size | |
| Conv1d | M | 6 | 300 | 36 | 42 | 150 | 72 | 78 | 75 |
| Conv1d | 6 | 12 | 300 | 42 | 48 | 150 | 78 | 84 | 75 |
| Conv1d | 12 | 18 | 300 | 48 | 54 | 150 | 84 | 90 | 75 |
| Conv1d | 18 | 24 | 300 | 54 | 60 | 150 | 90 | 96 | 75 |
| Conv1d | 24 | 30 | 300 | 60 | 66 | 150 | 96 | 102 | 75 |
| Conv1d | 30 | 36 | 300 | 66 | 72 | 150 | 102 | 108 | 75 |
| Max pooling kernel size 2 stride 2 | 36 | 36 | 150 | 72 | 72 | 75 | 108 | 108 | 38 |
| Skip layer kernel size 1 stride 2 | M | 36 | 150 | 36 | 72 | 75 | 72 | 108 | 38 |
| Fall | Sit | Stand | Jump | Jog | LW | US | DS | Macro | |
|---|---|---|---|---|---|---|---|---|---|
| Foot pressures | |||||||||
| Recall Precision F1-score | 0.935 0.973 0.950 | 0.992 0.963 0.973 | 0.850 0.922 0.875 | 0.837 0.825 0.812 | 0.898 0.846 0.853 | 0.755 0.819 0.764 | 0.644 0.569 0.555 | 0.622 0.465 0.487 | 0.817 0.798 0.784 |
| Center of pressure | |||||||||
| Recall Precision F1-score | 0.953 0.888 0.913 | 0.856 0.937 0.877 | 0.923 0.869 0.885 | 0.876 0.951 0.902 | 0.945 0.977 0.958 | 0.922 0.882 0.887 | 0.762 0.877 0.783 | 0.848 0.893 0.844 | 0.886 0.909 0.881 |
| Foot pressures + center of pressure | |||||||||
| Recall Precision F1-score | 0.971 0.943 0.980 | 0.976 0.989 0.980 | 0.946 0.906 0.921 | 0.891 0.924 0.897 | 0.900 0.901 0.881 | 0.852 0.869 0.841 | 0.602 0.638 0.580 | 0.574 0.671 0.592 | 0.839 0.855 0.831 |
| Fall | Sit | Stand | Jump | Jog | LW | US | DS | Macro | |
|---|---|---|---|---|---|---|---|---|---|
| Inertial data | |||||||||
| Recall Precision F1-score | 0.999 0.998 0.998 | 0.724 0.887 0.770 | 0.862 0.781 0.800 | 0.976 0.957 0.963 | 0.915 0.962 0.930 | 0.974 0.965 0.968 | 0.972 0.974 0.968 | 0.987 0.994 0.990 | 0.926 0.940 0.923 |
| Inertial parameters | |||||||||
| Recall Precision F1-score | 0.995 0.969 0.980 | 0.769 0.790 0.759 | 0.774 0.788 0.767 | 0.941 0.956 0.940 | 0.932 0.958 0.938 | 0.963 0.940 0.946 | 0.937 0.990 0.954 | 0.961 0.973 0.958 | 0.909 0.921 0.905 |
| Inertial data + inertial parameters | |||||||||
| Recall Precision F1-score | 0.994 0.988 0.990 | 0.854 0.819 0.804 | 0.742 0.887 0.762 | 0.968 0.968 0.966 | 0.943 0.958 0.946 | 0.962 0.964 0.961 | 0.964 0.973 0.964 | 0.990 0.995 0.993 | 0.927 0.964 0.923 |
| Fall | Sit | Stand | Jump | Jog | LW | US | DS | Macro | |
|---|---|---|---|---|---|---|---|---|---|
| Foot pressures + center of pressure + inertial data + inertial parameters | |||||||||
| Recall Precision F1-score | 0.996 0.997 0.996 | 0.987 0.995 0.990 | 0.990 0.979 0.983 | 0.981 0.965 0.971 | 0.924 0.953 0.931 | 0.917 0.957 0.960 | 0.919 0.948 0.924 | 0.979 0.987 0.983 | 0.968 0.973 0.967 |
| Center of pressure + inertial data + inertial parameters | |||||||||
| Recall Precision F1-score | 0.998 0.991 0.994 | 0.904 0.961 0.924 | 0.958 0.920 0.934 | 0.991 0.980 0.985 | 0.956 0.957 0.953 | 0.966 0.960 0.961 | 0.926 0.964 0.938 | 0.981 0.991 0.985 | 0.960 0.966 0.959 |
| Fall | Sit | Stand | Jump | Jog | LW | US | DS | Macro | |
|---|---|---|---|---|---|---|---|---|---|
| Left foot | |||||||||
| Recall Precision F1-score | 0.998 0.995 0.996 | 0.969 0.988 0.972 | 0.978 0.970 0.970 | 0.922 0.929 0.919 | 0.883 0.926 0.894 | 0.961 0.935 0.945 | 0.946 0.963 0.950 | 0.981 0.979 0.979 | 0.955 0.961 0.953 |
| Right foot | |||||||||
| Recall Precision F1-score | 0.998 0.996 0.997 | 0.977 0.998 0.985 | 0.990 0.971 0.979 | 0.977 0.951 0.960 | 0.920 0.967 0.935 | 0.972 0.962 0.966 | 0.952 0.963 0.951 | 0.982 0.994 0.988 | 0.971 0.975 0.970 |
| Double feet | |||||||||
| Recall Precision F1-score | 0.996 0.997 0.996 | 0.987 0.995 0.990 | 0.990 0.979 0.983 | 0.981 0.965 0.971 | 0.924 0.953 0.931 | 0.917 0.957 0.960 | 0.919 0.948 0.924 | 0.979 0.987 0.983 | 0.968 0.973 0.967 |
| True Class | Predicted Class | |||||||
|---|---|---|---|---|---|---|---|---|
| Fall | Sit | Stand | Jump | Jog | LW | US | DS | |
| Fall | 479.03 457.38 479.19 | 0.03 2.88 0.28 | 0.44 4.78 0.09 | 0.06 13.28 0.13 | 0 0.06 0 | 0.31 1.19 0.13 | 0.09 0.09 0.03 | 0.03 0.34 0.16 |
| Sit | 0 5.16 0 | 385.16 410.84 434.00 | 94.84 64.00 46.00 | 0 0 0 | 0 0 0 | 0 0 0 | 0 0 0 | 0 0 0 |
| Stand | 0.19 6.16 0 | 70.63 25.75 17.63 | 404.00 443.03 460.00 | 0.38 3.09 2.38 | 0 0 0 | 4.81 1.97 0 | 0 0 0 | 0 0 0 |
| Jump | 0.50 42.50 0.25 | 0 0 0 | 0.03 16.78 0.44 | 462.50 420.66 475.84 | 9.59 0.09 3.13 | 5.72 0.06 0.25 | 1.06 0.06 0.03 | 0.59 0.09 0.06 |
| Jog | 0.41 1.25 0 | 0 0 0 | 0.16 0 0 | 17.84 3.78 6.09 | 446.47 453.78 458.66 | 2.69 2.69 1.69 | 7.84 2.38 12.31 | 4.28 16.13 1.25 |
| Walk | 0.22 6.09 0.06 | 0 0 0 | 5.69 1.28 2.19 | 3.78 1.19 0.72 | 4.59 3.75 7.09 | 461.34 442.75 463.66 | 3.19 19.97 4.56 | 0.88 4.97 1.72 |
| US | 0.50 16.19 0.25 | 0 0 0 | 0 3.84 1.56 | 10.50 0 2.34 | 3.78 0.13 10.59 | 8.47 67.00 19.78 | 455.06 350.88 444.25 | 1.69 41.97 1.22 |
| DS | 0 8.59 4.81 | 0 0 0 | 0 0 0 | 0.03 1.44 0.03 | 7.66 9.22 2.34 | 4.22 17.81 0.47 | 2.84 35.72 1.38 | 465.25 407.22 470.97 |
| Input Features | Input Shape | Number of Weights | Computations (MFLOPs) |
|---|---|---|---|
| Foot pressures | 22,300 | 462,238 | 82.9 |
| Center of pressure (CoP) | 4300 | 460,510 | 82.0 |
| Foot pressures + CoP | 26,300 | 462,622 | 83.1 |
| Inertial data | 12,300 | 461,278 | 82.4 |
| Inertial parameters | 6300 | 460,702 | 82.1 |
| Inertial (data + parameters) = | 18,300 | 461,854 | 82.7 |
| Foot pressures + CoP + inertial (data + parameters) | 44,300 | 464,350 | 83.9 |
| CoP + inertial (data + parameters) | 22,300 | 462,238 | 82.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chan, H.-L.; Ouyang, Y.; Chen, R.-S.; Lai, Y.-H.; Kuo, C.-C.; Liao, G.-S.; Hsu, W.-Y.; Chang, Y.-J. Deep Neural Network for the Detections of Fall and Physical Activities Using Foot Pressures and Inertial Sensing. Sensors 2023, 23, 495. https://doi.org/10.3390/s23010495
Chan H-L, Ouyang Y, Chen R-S, Lai Y-H, Kuo C-C, Liao G-S, Hsu W-Y, Chang Y-J. Deep Neural Network for the Detections of Fall and Physical Activities Using Foot Pressures and Inertial Sensing. Sensors. 2023; 23(1):495. https://doi.org/10.3390/s23010495
Chicago/Turabian StyleChan, Hsiao-Lung, Yuan Ouyang, Rou-Shayn Chen, Yen-Hung Lai, Cheng-Chung Kuo, Guo-Sheng Liao, Wen-Yen Hsu, and Ya-Ju Chang. 2023. "Deep Neural Network for the Detections of Fall and Physical Activities Using Foot Pressures and Inertial Sensing" Sensors 23, no. 1: 495. https://doi.org/10.3390/s23010495
APA StyleChan, H.-L., Ouyang, Y., Chen, R.-S., Lai, Y.-H., Kuo, C.-C., Liao, G.-S., Hsu, W.-Y., & Chang, Y.-J. (2023). Deep Neural Network for the Detections of Fall and Physical Activities Using Foot Pressures and Inertial Sensing. Sensors, 23(1), 495. https://doi.org/10.3390/s23010495