


Research on Vibration Amplitude of Ultra-Precision Aerostatic Motorized Spindle under the Combined Action of Rotor Unbalance and Hydrodynamic Effect


Abstract
:1. Introduction
2. Mathematical Models
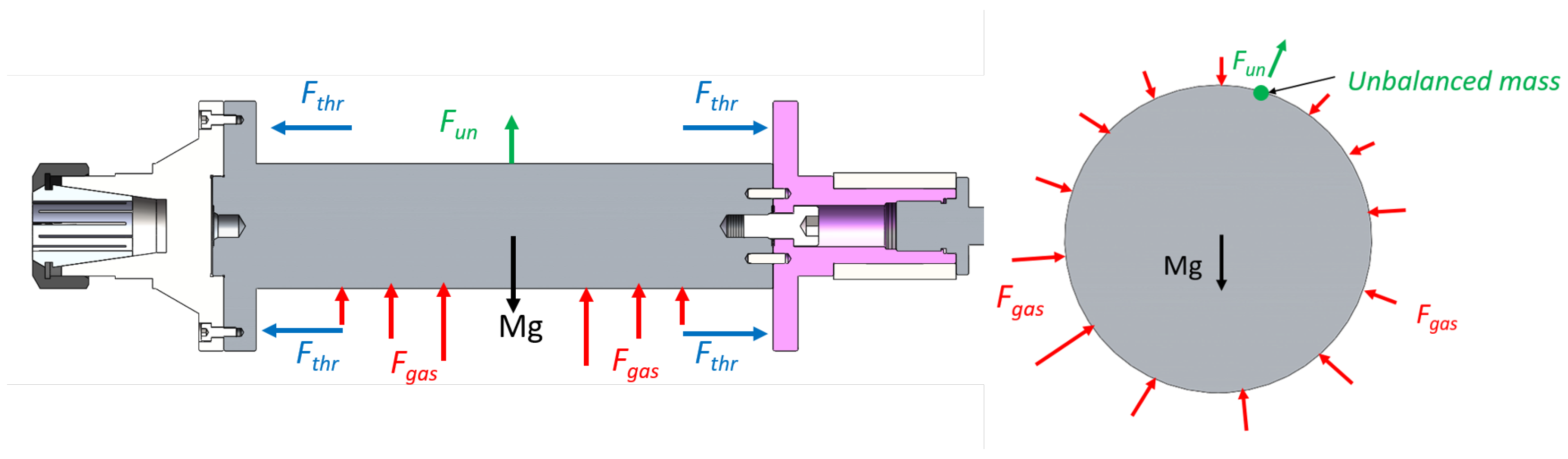
2.1. Physical Model Structure
2.2. Gas Film Force
2.2.1. Boundary Conditions
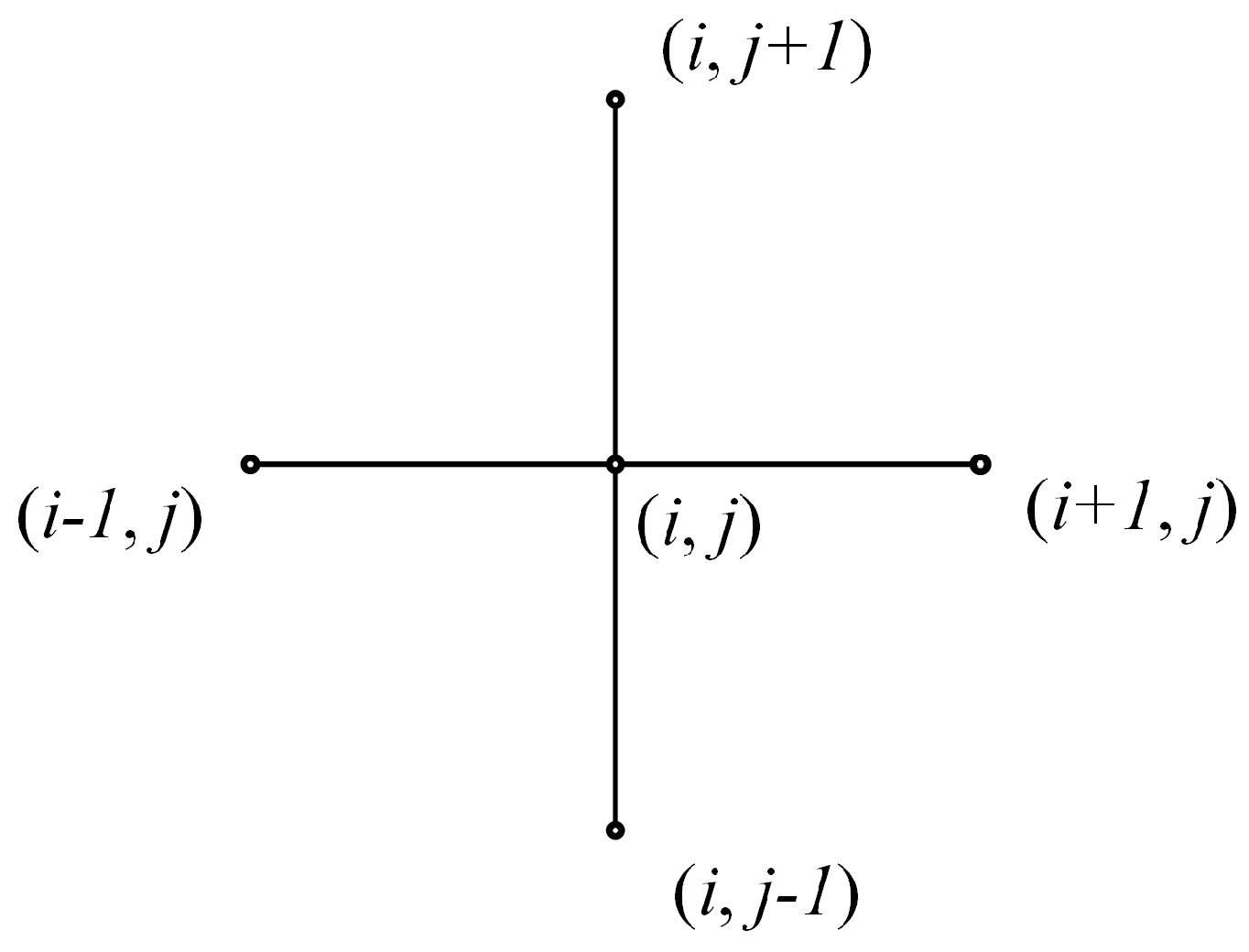
2.2.2. Reynolds Equation of Gas Lubrication and Hydrodynamic Effect
2.2.3. Calculation of Gas Film Flow
2.3. Permissible Unbalanced Mass and Unbalanced Force of Rotor
2.4. Equilibrium Equation and Calculation Flow
3. Results and Discussion
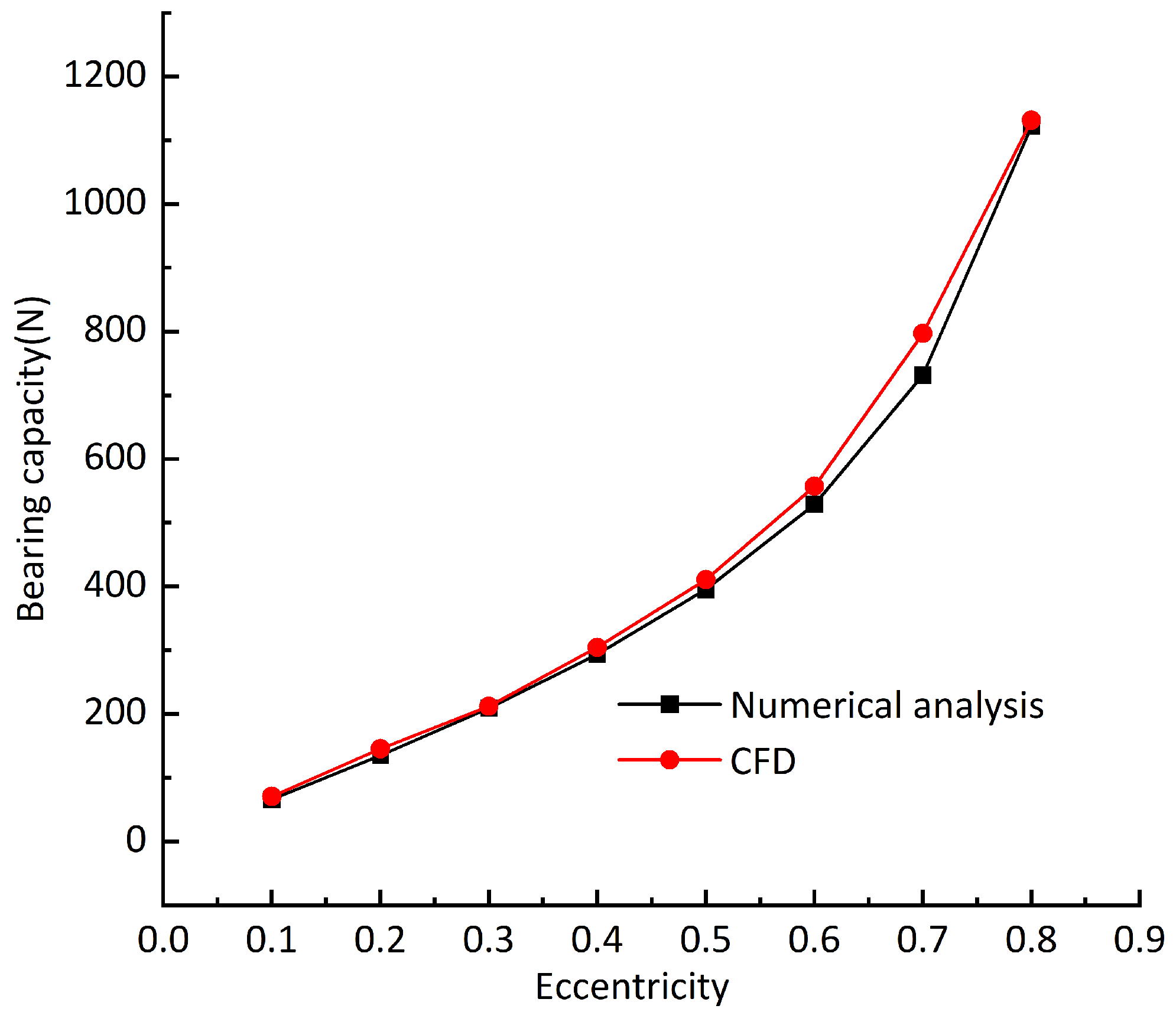
3.1. Correctness Verification of Calculation
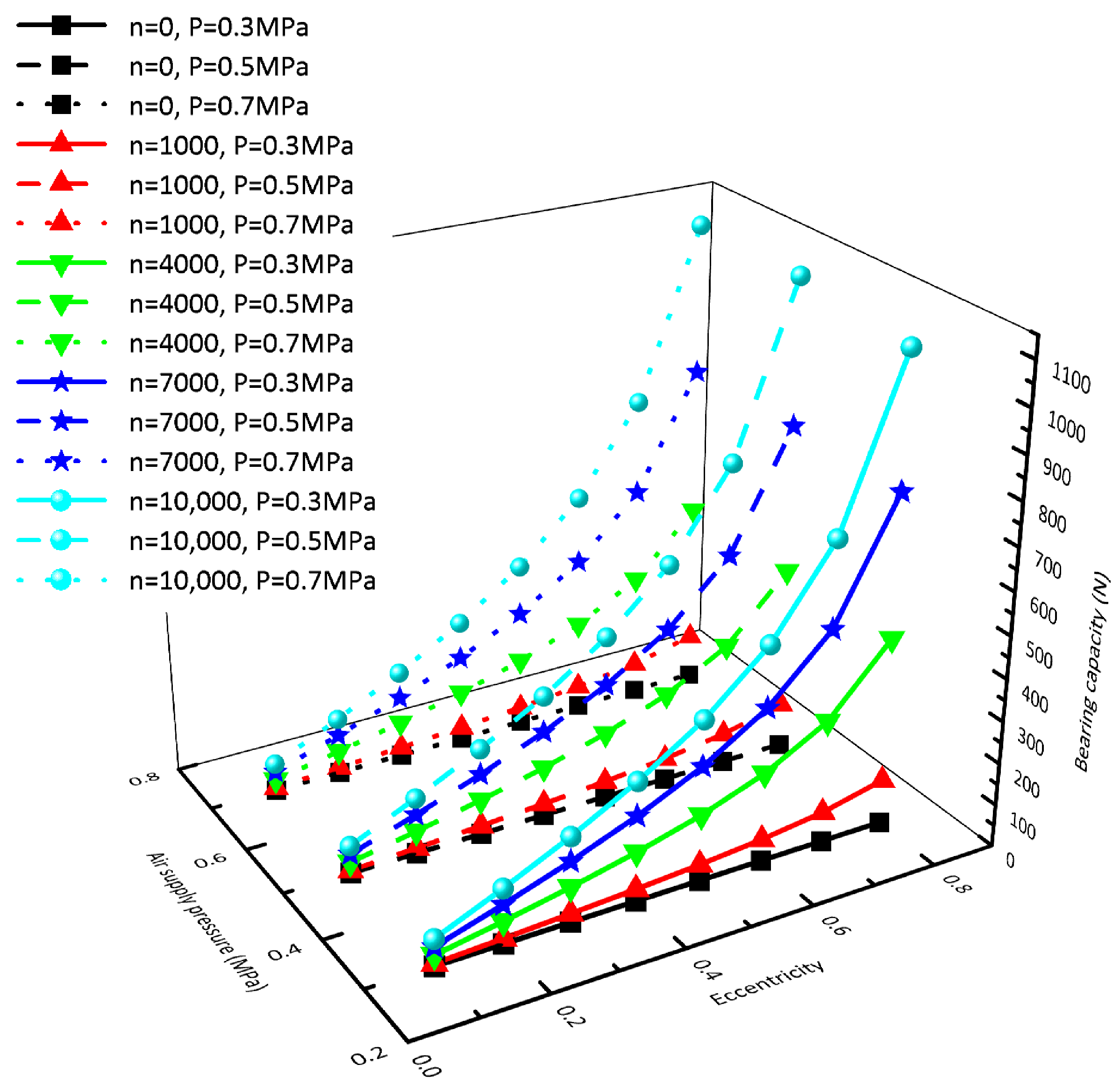
3.2. Influence of Hydrodynamic Effect on Bearing Capacity
3.3. Influence of the Hydrodynamic Effect on the Static Equilibrium Position
3.4. Research on Dynamic Equilibrium Position under the Combined Actions of Rotor Unbalance and Hydrodynamic Effect
3.4.1. Dynamic Equilibrium Position
3.4.2. The Influence of Rotor Unbalance on the Maximum Offset of Dynamic Equilibrium Position
4. Conclusions
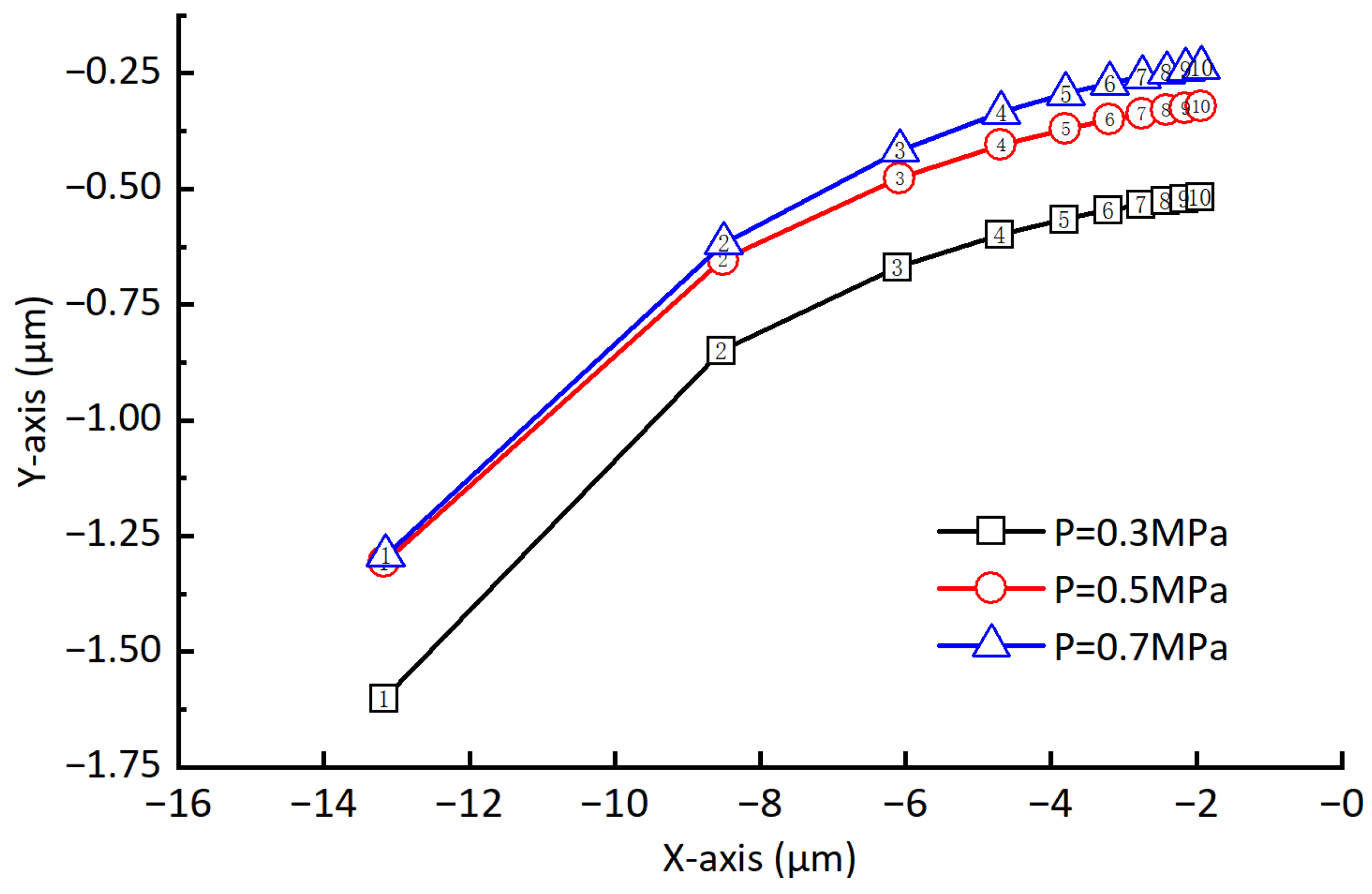
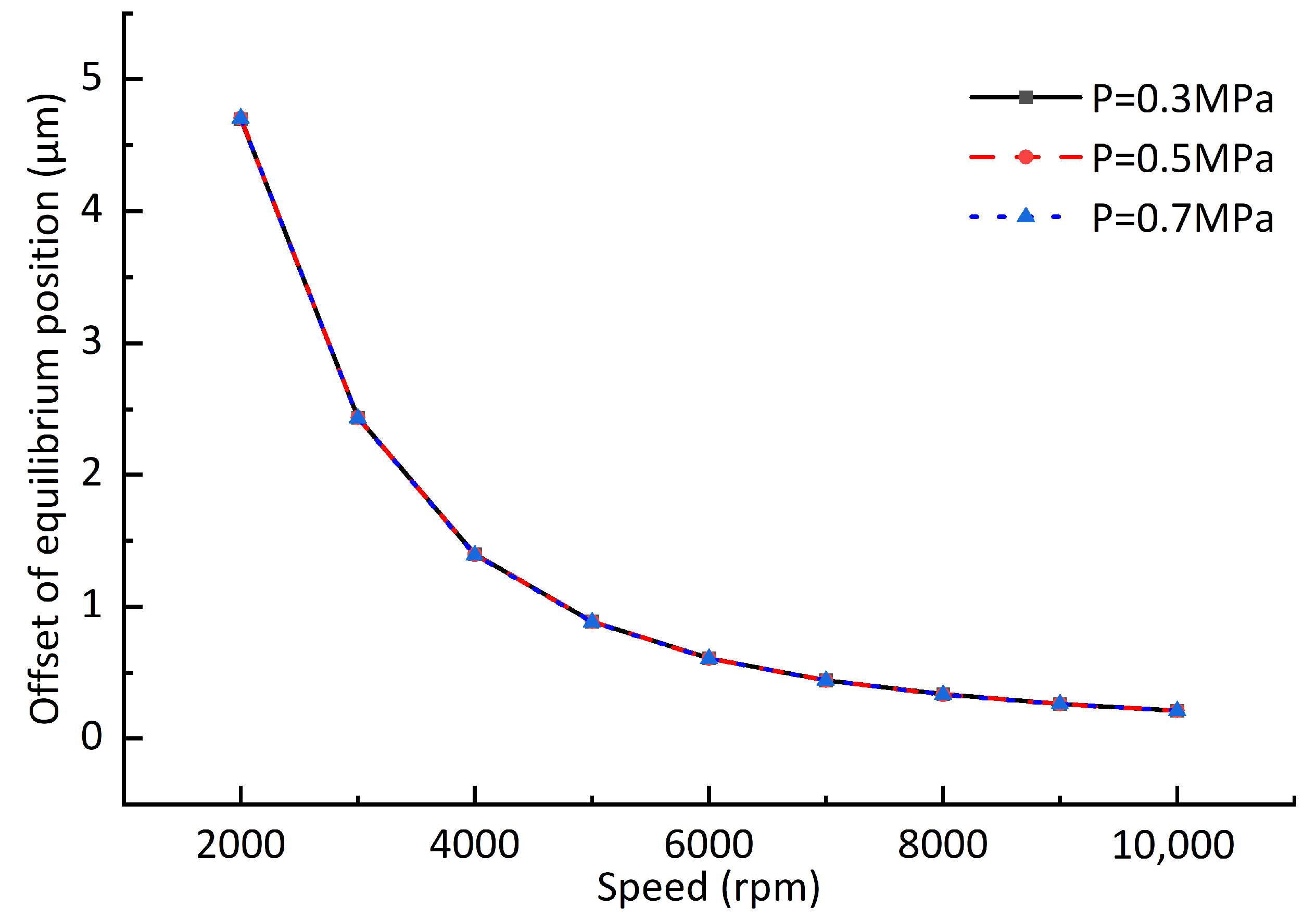
- The static equilibrium position gradually moves towards the center of the journal with the increase in rotating speed, which causes the offset of the rotor whirl track. The rotating speed has a great impact on the static equilibrium position. With the increase in rotating speed, the offset amplitude of the static equilibrium position will gradually decrease. The static equilibrium position is different when the air supply pressures are different, which cannot be ignored in ultra-precision machining and measurement.
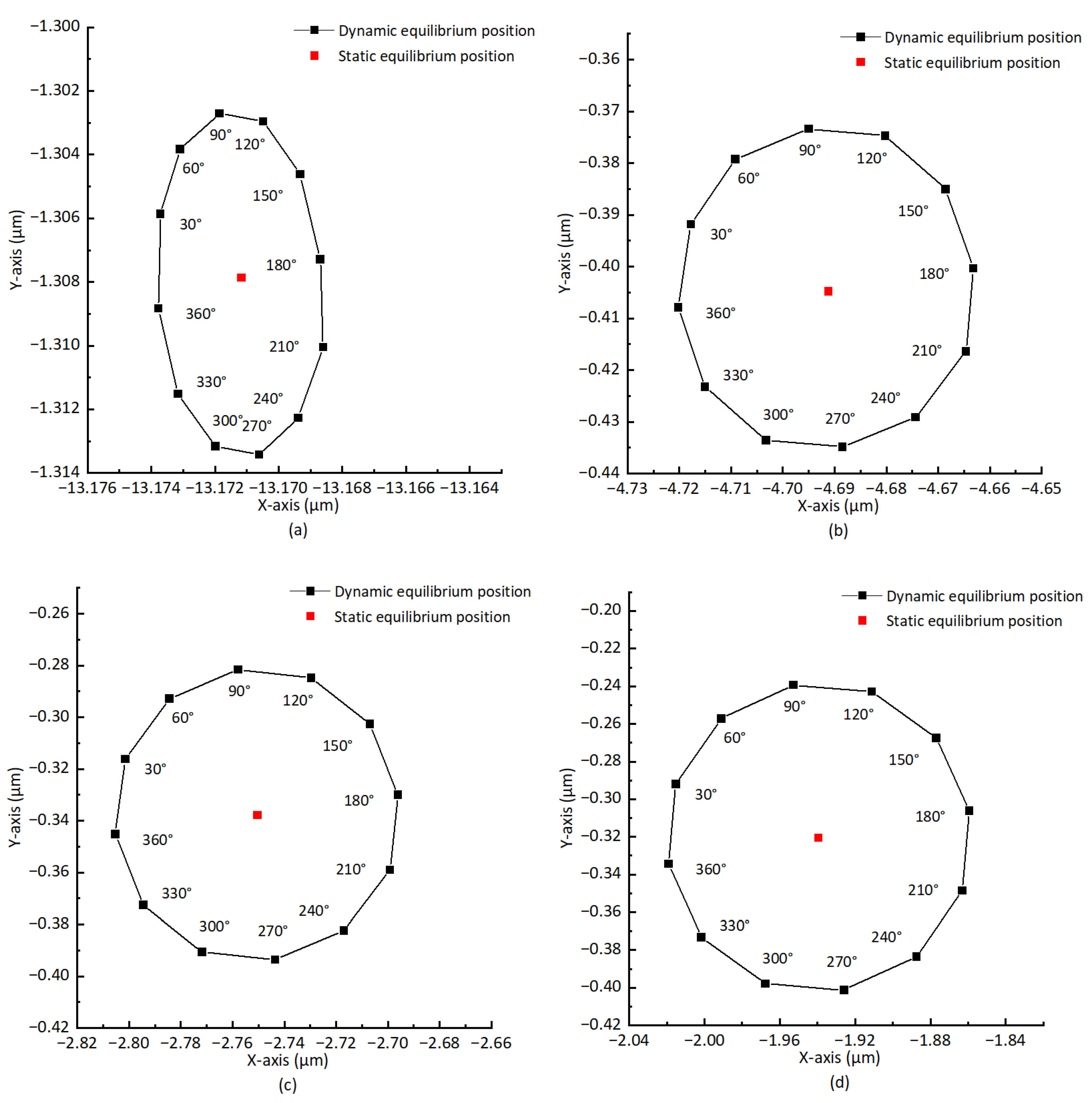
- The difference between horizontal stiffness and vertical stiffness is the reason for why the whirl track of the rotor is approximately elliptical, and for why the direction of the maximum offset points obliquely above. The enhancement of the hydrodynamic effect will make the curve formed by the rotor’s dynamic equilibrium position more “round”.
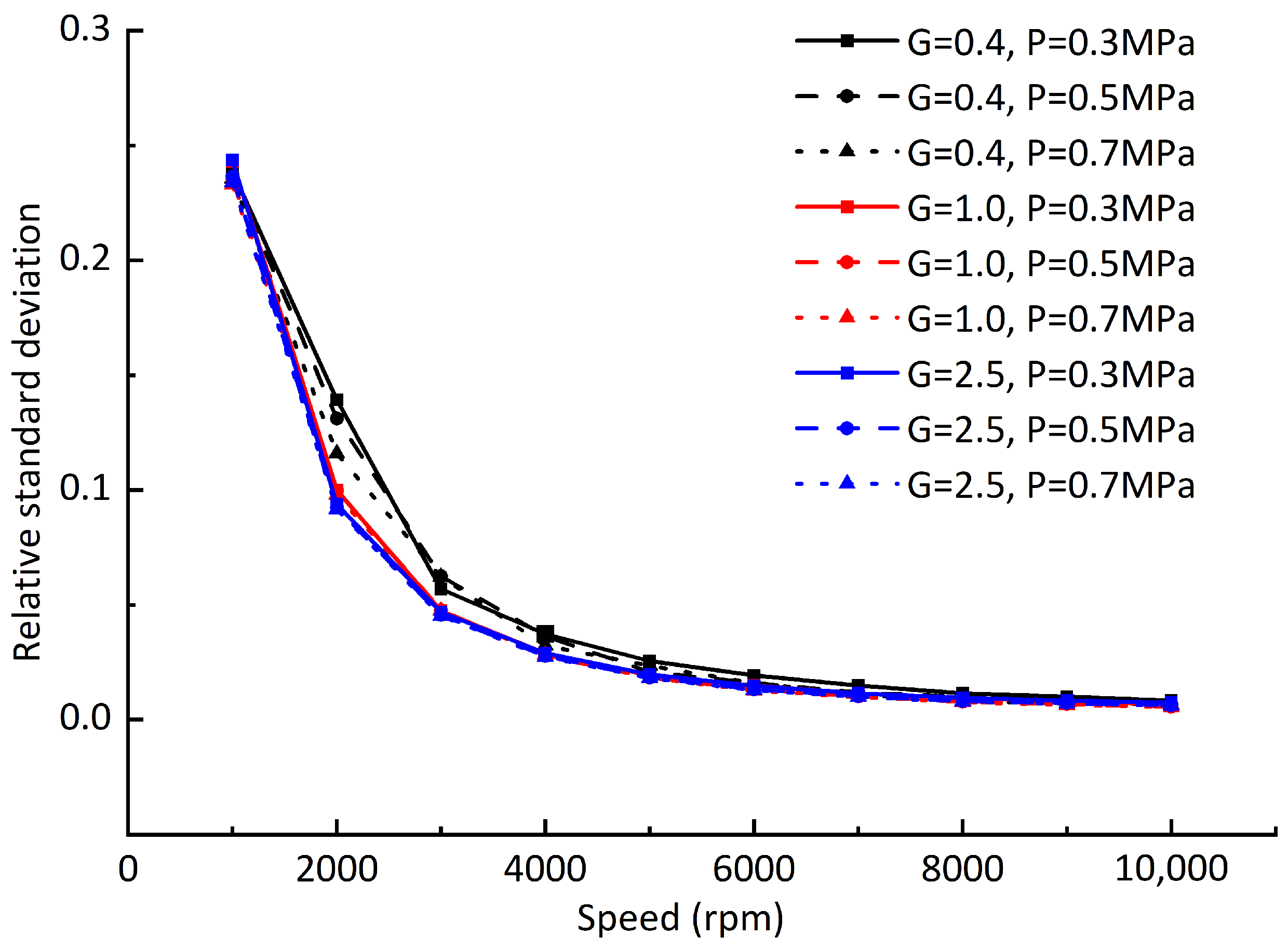
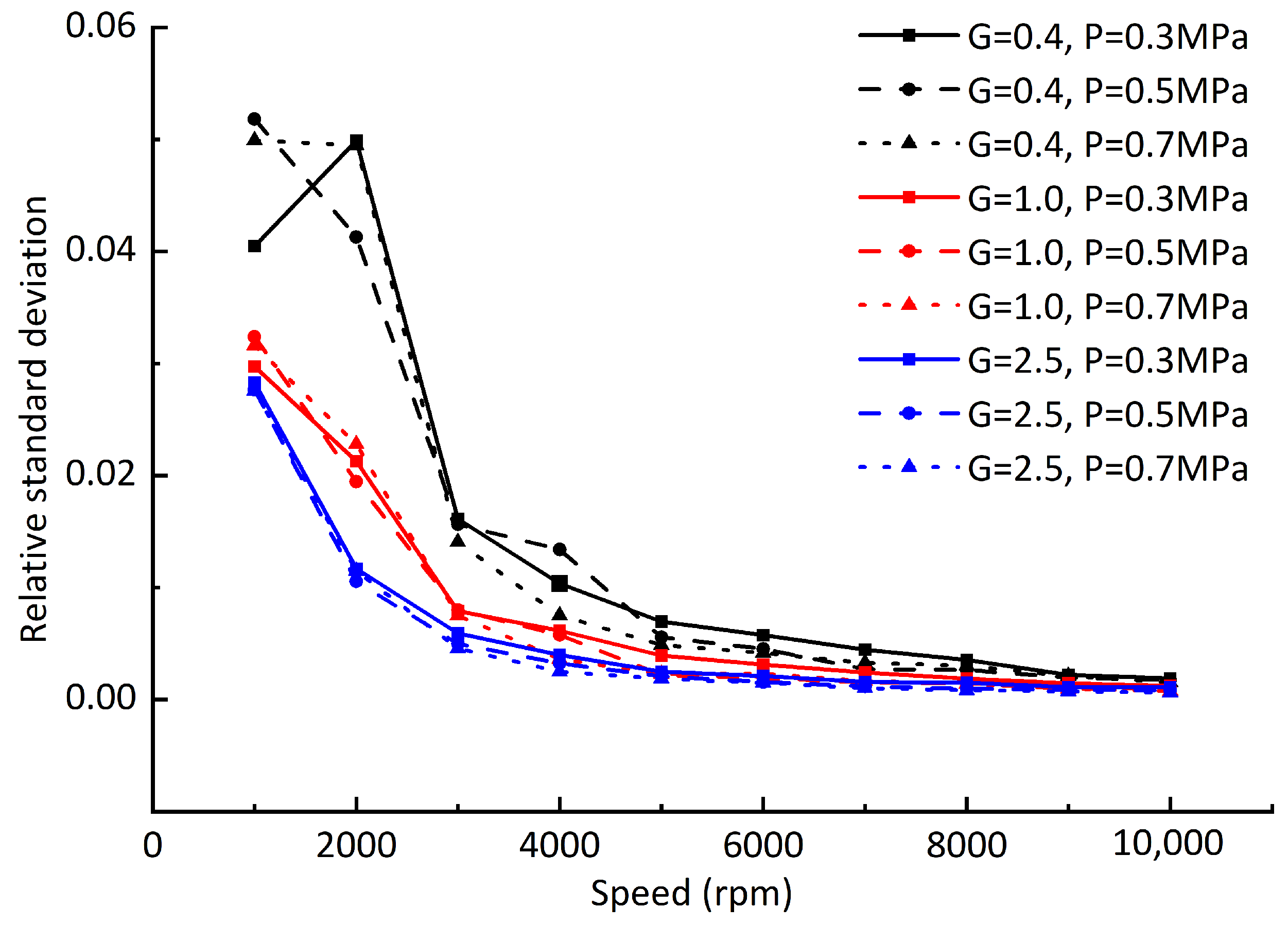
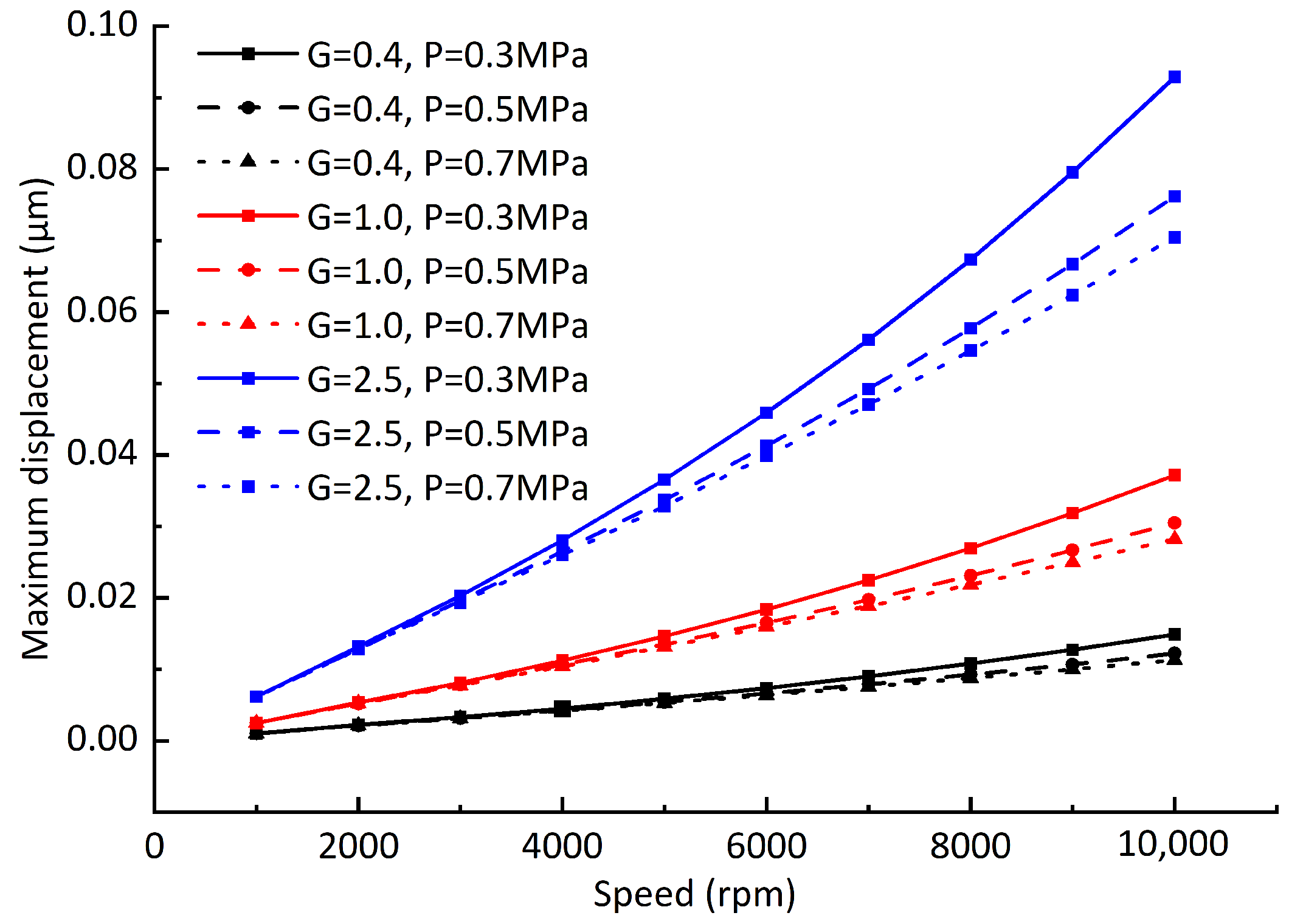
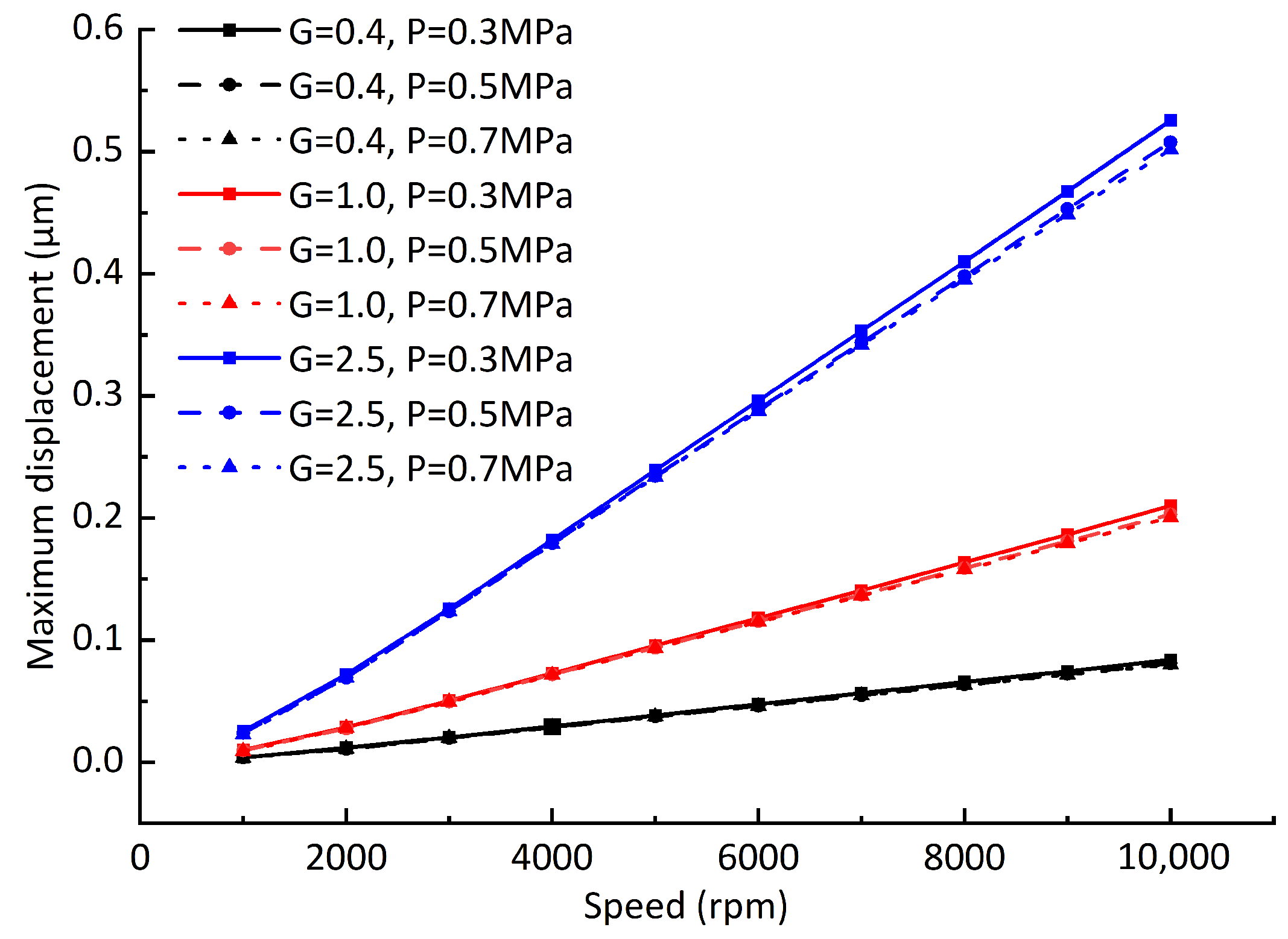
- The air supply pressure has little effect on the rotor vibration amplitude, while the rotating speed will have a significant effect on the rotor vibration amplitude. Although the unbalanced force increases nonlinearly with the rotating speed, the hydrodynamic effect caused by the rotating speed increase can weaken the influence of the unbalanced force to a certain extent. The maximum vibration amplitude of the rotor increases approximately linearly with the increase in rotating speed. Reducing the rotor unbalance as much as possible can effectively reduce the maximum vibration amplitude of the rotor. The maximum vibration amplitude of the rotor is approximately proportional to the rotor unbalance when at the same rotation speed and air supply pressure. According to the linear relationship, the maximum vibration amplitude of the rotor can be approximately predicted when the rotation speed or rotor unbalance changes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gao, Q.; Chen, W.; Lu, L.; Huo, D.; Cheng, K. Aerostatic bearings design and analysis with the application to precision engineering: State-of-the-art and future perspectives. Tribol. Int. 2019, 135, 1–17. [Google Scholar] [CrossRef]
- Karpat, Y. Influence of diamond tool chamfer angle on surface integrity in ultra-precision turning of singe crystal silicon. Int. J. Adv. Manuf. Technol. 2019, 101, 1565–1572. [Google Scholar] [CrossRef]
- Nanotech 250UPL V2 Ultra Precision Lathe. Available online: https://nanotechsys.com/250-upl/ (accessed on 9 November 2022).
- Zhang, S.; To, S.; Zhang, G.; Zhu, Z. A review of machine-tool vibration and its influence upon surface generation in ultra-precision machining. Int. J. Mach. Tools Manuf. 2015, 91, 34–42. [Google Scholar] [CrossRef]
- Wojciechowski, S.; Mrozek, K. Mechanical and technological aspects of micro ball end milling with various tool inclinations. Int. J. Mech. Sci. 2017, 134, 424–435. [Google Scholar] [CrossRef]
- Wojciechowski, S.; Maruda, R.W.; Krolczyk, G.M.; Niesłony, P. Application of signal to noise ratio and grey relational analysis to minimize forces and vibrations during precise ball end milling. Precis. Eng. 2018, 51, 582–596. [Google Scholar] [CrossRef]
- Tu, J.F.; Bossmanns, B.; Hung, S.C. Modeling and error analysis for assessing spindle radial error motions. Precis. Eng. 1997, 21, 90–101. [Google Scholar] [CrossRef]
- ISO 230-7:2006; Test Code for Machine Tools: Part 7: Geometric Accuracy of Axes of Rotation. ISO: Geneva, Switzerland, 2006.
- Bi, G.; Sun, Z.; Zhang, J.; Wang, Z.; An, C. Experiment on main factors affecting surface roughness in ultra-precision fly cutting. Opt. Precis. Eng. 2015, 23, 266–271. [Google Scholar]
- Xiong, R.; Liu, X.; Xiong, Z.; Zhang, S.; Zhao, L. Experimental study on surface morphology of ultra-precision turning. Manuf. Technol. Mach. Tool 2020, 7, 72–75. [Google Scholar]
- Chen, X.; Xu, J.; Fang, H.; Tian, R. Influence of cutting parameters on the ductile-brittle transition of single-crystal calcium fluoride during ultra-precision cutting. Int. J. Adv. Manuf. Technol. 2017, 89, 219–225. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, W.; Liang, Y.; An, C.; Chen, G.; Su, H. Dynamic error budget analysis of an ultraprecision flycutting machine tool. Int. J. Adv. Manuf. Technol. 2015, 76, 1215–1224. [Google Scholar] [CrossRef]
- Cheung, C.F.; To, S.; Lee, W.B. Anisotropy of surface roughness in diamond turning of brittle single crystals. Mater. Manuf. Process. 2002, 17, 251–267. [Google Scholar] [CrossRef]
- To, S.; Cheung, C.F.; Lee, W.B. Influence of material swelling on surface roughness in diamond turning of single crystals. Mater. Sci. Technol. 2001, 17, 102–108. [Google Scholar] [CrossRef]
- Liu, T. Aerostatic Gas Lubrication; Harbin Institute of Technology Press: Harbin, China, 1990. [Google Scholar]
- Du, J.; Zhang, G.; Liu, D. Influences of pressure-equalizing groove on the load capacity of externally pressurized gas journal bearings. Jixie Gongcheng Xuebao (Chin. J. Mech. Eng.) 2012, 48, 106–112. [Google Scholar] [CrossRef]
- Chen, Y.; Chiu, C.; Cheng, Y. Influences of operational conditions and geometric parameters on the stiffness of aerostatic journal bearings. Precis. Eng. 2010, 34, 722–734. [Google Scholar] [CrossRef]
- Swanson, E.; Heshmat, H.; Walton, J. Performance of a foil-magnetic hybrid bearing. J. Eng. Gas Turbines Power 2002, 124, 375–382. [Google Scholar] [CrossRef]
- Cui, H.; Wang, Y.; Yue, X.; Huang, M.; Wang, W. Effects of manufacturing errors on the static characteristics of aerostatic journal bearings with porous restrictor. Tribol. Int. 2017, 115, 246–260. [Google Scholar] [CrossRef]
- Cui, H.; Wang, Y.; Yue, X.; Huang, M.; Wang, W.; Jiang, Z. Numerical analysis and experimental investigation into the effects of manufacturing errors on the running accuracy of the aerostatic porous spindle. Tribol. Int. 2018, 118, 20–36. [Google Scholar] [CrossRef]
- Zhang, G.; Zheng, J.; Yu, H.; Zhao, R.; Shi, W.; Wang, J. Rotation Accuracy Analysis of Aerostatic Spindle Considering Shaft’s Roundness and Cylindricity. Appl. Sci. 2021, 11, 7912. [Google Scholar] [CrossRef]
- Zhang, G.; Zheng, J.; Yu, H.; Chen, T.; Zhang, K.; Dou, G. Evaluation of the Influence of Shaft Shape Errors on the Rotation Accuracy of Aerostatic Spindle—Part 1: Modeling. Electronics 2022, 11, 1304. [Google Scholar] [CrossRef]
- San Andrés, L.; Cable, T.A.; Zheng, Y.; De Santiago, O.; Devitt, D. Assessment of porous type gas bearings: Measurements of bearing performance and rotor vibrations. In Proceedings of the Turbo Expo: Power for Land, Sea, and Air. American Society of Mechanical Engineers, Seoul, Republic of Korea, 13–17 June 2016; Volume 49842, p. V07BT31A031. [Google Scholar]
- Liu, W.; Feng, K.; Huo, Y.; Guo, Z. Measurements of the rotordynamic response of a rotor supported on porous type gas bearing. J. Eng. Gas Turbines Power 2018, 140, 102501. [Google Scholar] [CrossRef]
- Zhang, S.; To, S.; Wang, H. A theoretical and experimental investigation into five-DOF dynamic characteristics of an aerostatic bearing spindle in ultra-precision diamond turning. Int. J. Mach. Tools Manuf. 2013, 71, 1–10. [Google Scholar] [CrossRef]
- Liu, J. The Study of the Vibration Characteristics of Rotor-Gas Bearing System. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2013. [Google Scholar]
- Cao, Z. Study on the Static and Dynamic Characteristicsof Self-Acting Gas Bearing. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2010. [Google Scholar]
- Zhang, G. Research of Dynamic Characteristics for High Speed Hybrid Gas Bearing Rotor System. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2010. [Google Scholar]
- Ansys Fluent. Available online: https://www.ansys.com/zh-cn/products/fluids/ansys-fluent (accessed on 9 November 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Journal radius (mm) | 25 |
| Journal length (mm) | 160 |
| Throttle slit width H (m) | 80 |
| Slit depth Y (mm) | 20 |
| Mean gas film gap () (m) | 20 |
| Environment pressure () (MPa) | 0.1 |
| Slit distance (mm) | 80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Song, P.; Yu, H.; Zhang, G. Research on Vibration Amplitude of Ultra-Precision Aerostatic Motorized Spindle under the Combined Action of Rotor Unbalance and Hydrodynamic Effect. Sensors 2023, 23, 496. https://doi.org/10.3390/s23010496
Wang W, Song P, Yu H, Zhang G. Research on Vibration Amplitude of Ultra-Precision Aerostatic Motorized Spindle under the Combined Action of Rotor Unbalance and Hydrodynamic Effect. Sensors. 2023; 23(1):496. https://doi.org/10.3390/s23010496
Chicago/Turabian StyleWang, Wenbo, Pengyun Song, Hechun Yu, and Guoqing Zhang. 2023. "Research on Vibration Amplitude of Ultra-Precision Aerostatic Motorized Spindle under the Combined Action of Rotor Unbalance and Hydrodynamic Effect" Sensors 23, no. 1: 496. https://doi.org/10.3390/s23010496
APA StyleWang, W., Song, P., Yu, H., & Zhang, G. (2023). Research on Vibration Amplitude of Ultra-Precision Aerostatic Motorized Spindle under the Combined Action of Rotor Unbalance and Hydrodynamic Effect. Sensors, 23(1), 496. https://doi.org/10.3390/s23010496