
Spatial Sensitivity of Navigation Using Signal-of-Opportunity (SoOP) from Starlink, Iridium-Next, GlobalStar, OneWeb, and Orbcomm Constellations †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Assumptions, BCCs, and WCCs
2.1.1. Dynamics of the Satellites
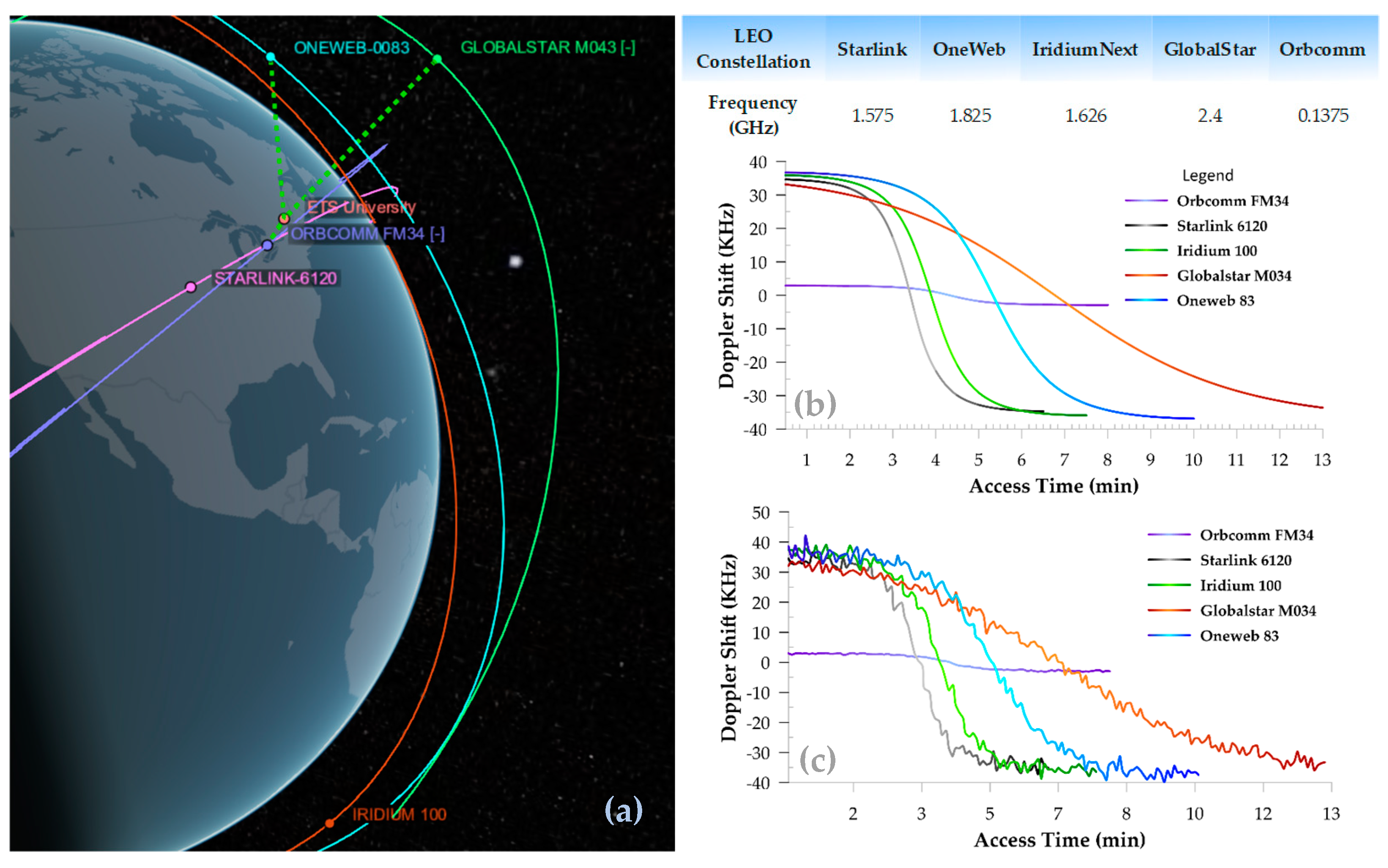
2.1.2. Propagation Medium, Channel Properties, and Clock-Drift Consideration
2.2. SoOPNE Structure
2.2.1. Initialization Data and Information Block
2.2.2. Prediction Module
2.2.3. Estimation Block
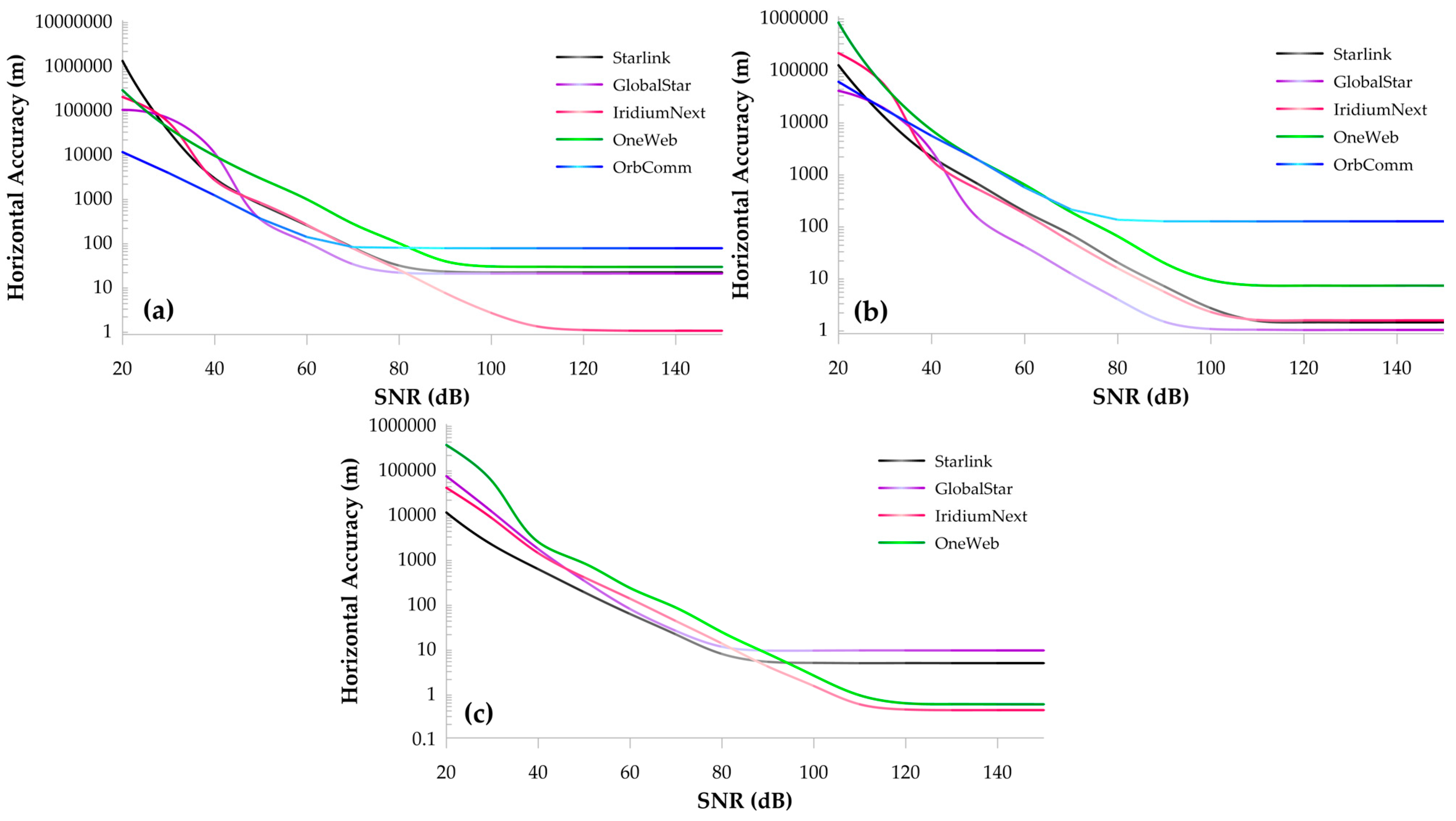
3. Simulation and Results
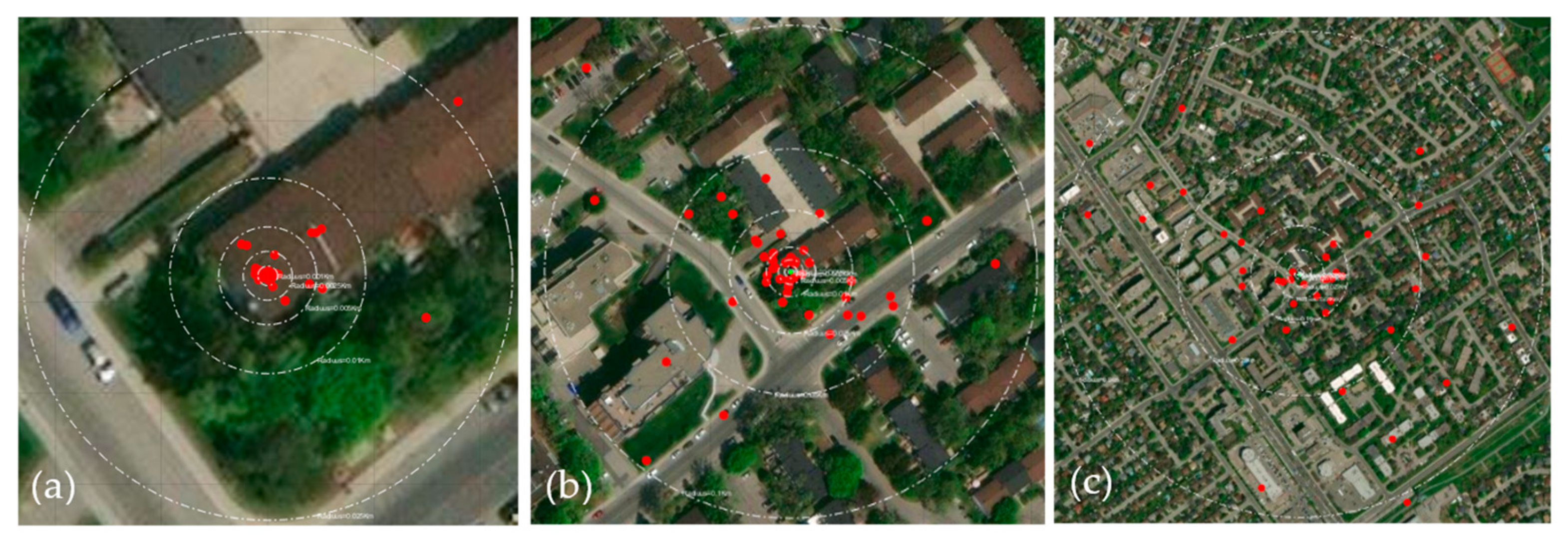
3.1. Effect of Different Latitudes
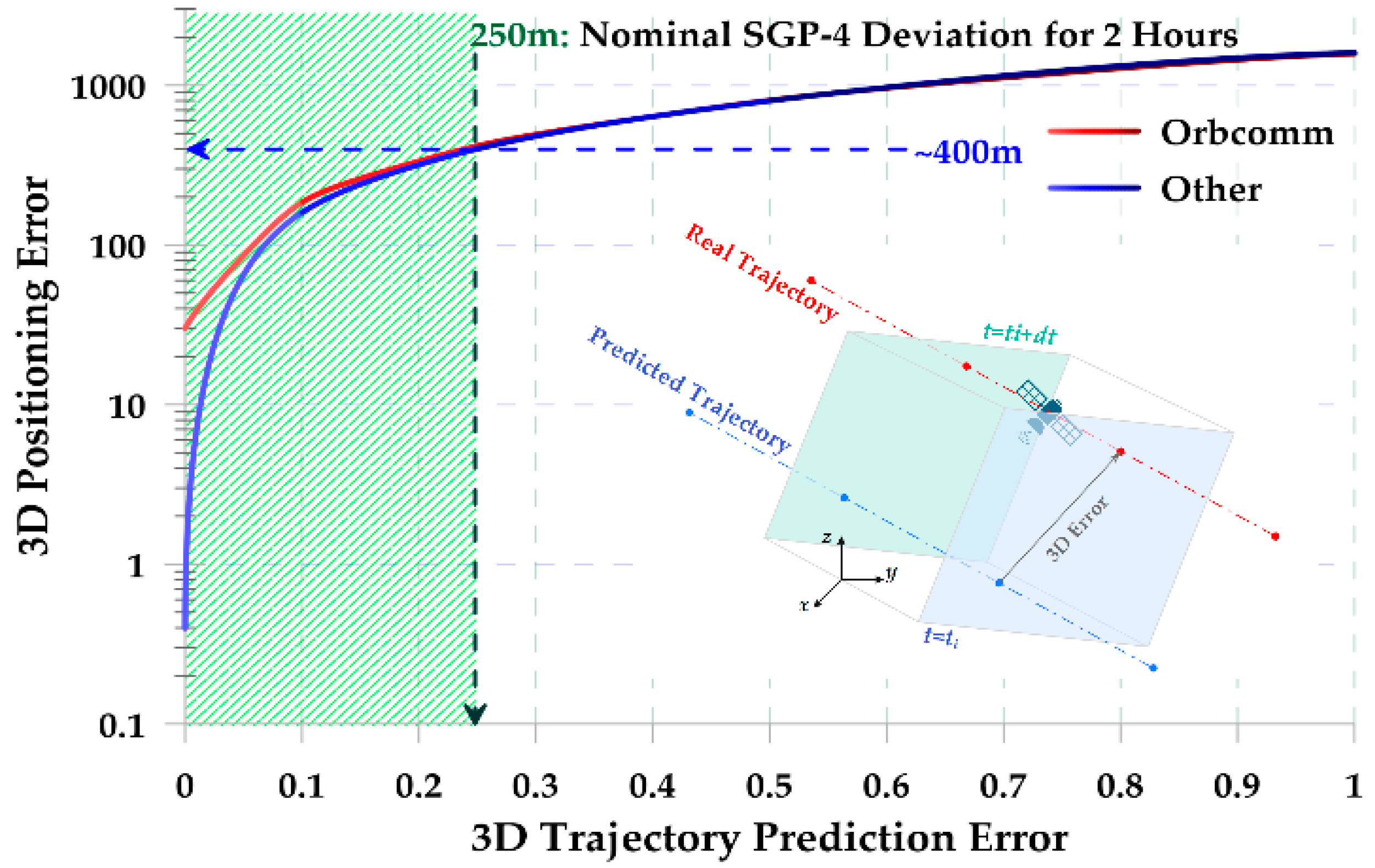
3.2. Inconsistency of the Real and Predicted SV Orbital Trajectory
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Egea-Roca, D.; Arizabaleta-Diez, M.; Pany, T.; Antreich, F.; Lopez-Salcedo, J.A.; Paonni, M.; Seco-Granados, G. GNSS User Technology: State-of-the-Art and Future Trends. IEEE Access 2022, 10, 39939–39968. [Google Scholar] [CrossRef]
- Kassas ZZ, M.; Maaref, M.; Morales, J.J.; Khalife, J.J.; Shamei, K. Robust Vehicular Localization and Map Matching in Urban Environments Through IMU, GNSS, and Cellular Signals. IEEE Intell. Transp. Syst. Mag. 2020, 12, 36–52. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, Y.; Chen, C.; Hyyppä, J. Walking Gaits Aided Mobile GNSS for Pedestrian Navigation in Urban Areas. IEEE Internet Things J. 2024, 11, 8499–8510. [Google Scholar] [CrossRef]
- He, Z.; Chen, W.; Yang, Y.; Weng, D.; Cao, N. Maritime Ship Target Imaging with GNSS-Based Passive Multistatic Radar. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–18. [Google Scholar] [CrossRef]
- Joubert, N.; Reid, T.G.; Noble, F. Developments in Modern GNSS and Its Impact on Autonomous Vehicle Architectures. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 2029–2036. [Google Scholar] [CrossRef]
- Issam, S.M.; Adnane, A.; Madiabdessalam AI, T. Anti-Jamming techniques for aviation GNSS-based navigation systems: Survey. In Proceedings of the 2020 IEEE 2nd International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 2–3 December 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Calvo-Palomino, R.; Bhattacharya, A.; Bovet, G.; Giustiniano, D. Short: LSTM-based GNSS Spoofing Detection Using Low-cost Spectrum Sensors. In Proceedings of the 2020 IEEE 21st International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Cork, Ireland, 31 August–3 September 2020; pp. 273–276. [Google Scholar] [CrossRef]
- Fu, T.; Wang, X.; Su, P. Design and Implementation of Missile Borne Active Antenna Based on GNSS. In Proceedings of the 2022 14th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Changsha, China, 15–16 January 2022; pp. 462–466. [Google Scholar] [CrossRef]
- Resilient Societies, EUSPA EO and GNSS Market Report, 1 January 2024. Available online: https://www.euspa.europa.eu/sites/default/files/euspa_market_report_2024.pdf (accessed on 5 March 2025).
- ICAO. Interference in Global Navigation System Thirty First Workshop/Meeting of the SAM Implementation Group (SAM/IG/31)—Regional Project RLA/06/901, 20/05/2024. Available online: https://www.icao.int/SAM/Documents/2024-RLA06901-SAMIG31/SAMIG31_IP6.4%20GNSS%20Interference.pdf (accessed on 5 March 2025).
- Novella, G.; Macabiau, C.; Garcia-Pena, A.; Martineau, A.; Estival, P.; Ladoux, P.; Troubet-Lacoste, O. Impact of Terrestrial Emitters on Civil Aviation GNSS Receivers. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 3863–3887. [Google Scholar]
- Li, S.; Wang, S.; Zhou, Y.; Shen, Z.; Li, X. Tightly Coupled Integration of GNSS, INS, and LiDAR for Vehicle Navigation in Urban Environments. IEEE Internet Things J. 2022, 9, 24721–24735. [Google Scholar] [CrossRef]
- Jin, R.; Liu, J.; Zhang, H.; Niu, X. Fast and Accurate Initialization for Monocular Vision/INS/GNSS Integrated System on Land Vehicle. IEEE Sens. J. 2021, 21, 26074–26085. [Google Scholar] [CrossRef]
- Basso, M.; Galanti, M.; Innocenti, G.; Miceli, D. Triggered INS/GNSS Data Fusion Algorithms for Enhanced Pedestrian Navigation System. IEEE Sens. J. 2020, 20, 7447–7459. [Google Scholar] [CrossRef]
- Voicu, A.M.; Bhattacharya, A.; Petrova, M. Handover Strategies for Emerging LEO, MEO, and HEO Satellite Networks. IEEE Access 2024, 12, 31523–31537. [Google Scholar] [CrossRef]
- Zidan, J.; Adegoke, E.I.; Kampert, E.; Birrell, S.A.; Ford, C.R.; Higgins, M.D. GNSS Vulnerabilities and Existing Solutions: A Review of the Literature. IEEE Access 2021, 9, 153960–153976. [Google Scholar] [CrossRef]
- Tiwari, V.; Agrawal, A.; Sharma, M.; Chaturvedi, P.; Katiyar, T.; Maheshwari, I. Mitigation of Jamming and Spoofing Attack on GNSS Signals Using Subspace Projection. In Proceedings of the 2023 3rd International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 21–22 December 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Jiang, W.; Cao, Z.; Cai, B.; Li, B.; Wang, J. Indoor and Outdoor Seamless Positioning Method Using UWB Enhanced Multi-Sensor Tightly-Coupled Integration. IEEE Trans. Veh. Technol. 2021, 70, 10633–10645. [Google Scholar] [CrossRef]
- An, S.; Liu, K.; Fan, Y.; Guo, J.; She, Z. Control Design for the Autonomous Horizontal Takeoff Phase of the Reusable Launch Vehicles. IEEE Access 2020, 8, 109015–109027. [Google Scholar] [CrossRef]
- Mu, L.; Xie, G.; Yu, X.; Wang, B.; Zhang, Y. Robust Guidance for a Reusable Launch Vehicle in Terminal Phase. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 1996–2011. [Google Scholar] [CrossRef]
- Fu, S.; Ding, Z.; Ke, Y.; Tian, L. Design Optimization and Experiment of 5-cm ECR Ion Thruster. IEEE Trans. Plasma Sci. 2020, 48, 676–684. [Google Scholar] [CrossRef]
- Darwish, T.; Kurt, G.K.; Yanikomeroglu, H.; Bellemare, M.; Lamontagne, G. LEO Satellites in 5G and Beyond Networks: A Review from a Standardization Perspective. IEEE Access 2022, 10, 35040–35060. [Google Scholar] [CrossRef]
- Ge, H.; Li, B.; Jia, S.; Nie, L.; Wu, T.; Yang, Z.; Shang, J.; Zheng, Y.; Ge, M. LEO Enhanced Global Navigation Satellite System (LeGNSS): Progress, opportunities, and challenges. Geo-Spat. Inf. Sci. 2022, 25, 1–13. [Google Scholar] [CrossRef]
- Iannucci, P.A.; Humphreys, T.E. Fused Low-Earth-Orbit GNSS. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 3730–3749. [Google Scholar] [CrossRef]
- Nagai, K.; Fasoro, T.; Spenko, M.; Henderson, R.; Pervan, B. Evaluating GNSS Navigation Availability in 3-D Mapped Urban Environments. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 639–646. [Google Scholar] [CrossRef]
- Jia, M.; Lee, H.; Khalife, J.; Kassas, Z.M.; Seo, J. Ground Vehicle Navigation Integrity Monitoring for Multi-Constellation GNSS Fused with Cellular Signals of Opportunity. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3978–3983. [Google Scholar] [CrossRef]
- Whiton, R.; Chen, J.; Johansson, T.; Tufvesson, F. Urban Navigation with LTE using a Large Antenna Array and Machine Learning. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Whiton, R.; Chen, J.; Tufvesson, F. LTE NLOS Navigation and Channel Characterization. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 2398–2408. [Google Scholar] [CrossRef]
- Hong, T.; Sun, J.; Jin, T.; Yi, Y.; Qu, J. Hybrid Positioning with DTMB and LTE Signals. In Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC), Harbin City, China, 28 June–2 July 2021; pp. 303–307. [Google Scholar] [CrossRef]
- Elgammal, K.W.; Turan, B.C.; Bedir, O.; Celebi, H.; Ozdemir, M.K. Signal of Opportunity Based TDOA Positioning Using Analog TV Signals. In Proceedings of the 2023 Fourteenth International Conference on Ubiquitous and Future Networks (ICUFN), Paris, France, 4–7 July 2023; pp. 451–455. [Google Scholar] [CrossRef]
- Rabinowitz, M.; Parkinson, B.W.; Cohen, C.E.; Lawrence, D.G. System Using LEO Satellites for Centimeter-Level Navigation. U.S. Patent US6373432B1, 16 April 2002. [Google Scholar]
- Ardito, C.T.; Morales, J.J.; Khalife, J.; Abdallah, A.; Kassas, Z.M. Performance evaluation of navigation using LEO satellite signals with periodically transmitted satellite positions. In Proceedings of the 2019 International Technical Meeting of The Institute of Navigation, Reston, VA, USA, 28–31 January 2019; pp. 306–318. [Google Scholar]
- Same, M.H.; Gandubert, G.; Gleeton, G.; Ivanov, P.; Landry, R., Jr. Simplified Welch Algorithm for Spectrum Monitoring. Appl. Sci. 2021, 11, 86. [Google Scholar] [CrossRef]
- Same, M.H.; Gleeton, G.; Gandubert, G.; Ivanov, P.; Landry, R.J. Multiple Narrowband Interferences Characterization, Detection and Mitigation Using Simplified Welch Algorithm and Notch Filtering. Appl. Sci. 2021, 11, 1331. [Google Scholar] [CrossRef]
- Kassas, Z.M.; Khairallah, N.; Kozhaya, S. Ad Astra: Simultaneous Tracking and Navigation with Mega constellation LEO Satellites. IEEE Aerosp. Electron. Syst. Mag. 2024, 39, 46–71. [Google Scholar] [CrossRef]
- Shahcheraghi, S.; Gourabi, F.N.; Neinavaie, M.; Kassas, Z.M. Joint Doppler and Azimuth DOA Tracking for Positioning with Iridium LEO Satellites. In Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2023), Denver, CO, USA, 11–15 September 2023. [Google Scholar]
- Racelis, D.; Joerger, M. High-Integrity TLE Error Models for MEO and GEO Satellites. In Proceedings of the 2018 AIAA SPACE and Astronautics Forum and Exposition, Orlando, FL, USA, 17–19 September 2018. [Google Scholar] [CrossRef]
- Khairallah, N.; Kassas, Z.M. Ephemeris Tracking and Error Propagation Analysis of LEO Satellites with Application to Opportunistic Navigation. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 1242–1259. [Google Scholar] [CrossRef]
- Qu, Z.; Zhang, G.; Cao, H.; Xie, J. LEO Satellite Constellation for Internet of Things. IEEE Access 2017, 5, 18391–18401. [Google Scholar] [CrossRef]
- Aida, S.; Kirschner, M. Accuracy Assessment of SGP4 Orbit Information Conversion into Osculation elements. In Proceedings of the 6th European Conference on Space Debris, Darmstadt, Germany, 22–25 April 2013. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esmaeilkhah, A.; Landry, R.J. Spatial Sensitivity of Navigation Using Signal-of-Opportunity (SoOP) from Starlink, Iridium-Next, GlobalStar, OneWeb, and Orbcomm Constellations. Eng. Proc. 2025, 88, 29. https://doi.org/10.3390/engproc2025088029
Esmaeilkhah A, Landry RJ. Spatial Sensitivity of Navigation Using Signal-of-Opportunity (SoOP) from Starlink, Iridium-Next, GlobalStar, OneWeb, and Orbcomm Constellations. Engineering Proceedings. 2025; 88(1):29. https://doi.org/10.3390/engproc2025088029
Chicago/Turabian StyleEsmaeilkhah, Ahmad, and Rene Jr Landry. 2025. "Spatial Sensitivity of Navigation Using Signal-of-Opportunity (SoOP) from Starlink, Iridium-Next, GlobalStar, OneWeb, and Orbcomm Constellations" Engineering Proceedings 88, no. 1: 29. https://doi.org/10.3390/engproc2025088029
APA StyleEsmaeilkhah, A., & Landry, R. J. (2025). Spatial Sensitivity of Navigation Using Signal-of-Opportunity (SoOP) from Starlink, Iridium-Next, GlobalStar, OneWeb, and Orbcomm Constellations. Engineering Proceedings, 88(1), 29. https://doi.org/10.3390/engproc2025088029