
Hybrid Cycle Slip Detection Method for Smartphone Global Navigation Satellite System †


Abstract
1. Introduction
2. Smartphone GNSS Data
3. Application of Conventional CSD Methods on Smartphone GNSS Data
4. Time-Differenced Functional Model
5. Integer Ambiguity Resolution and Smartphone GNSS Noise Variance
6. Proposed Cycle Slip Detection and Repair (CSDR) Method for Smartphone GNSS
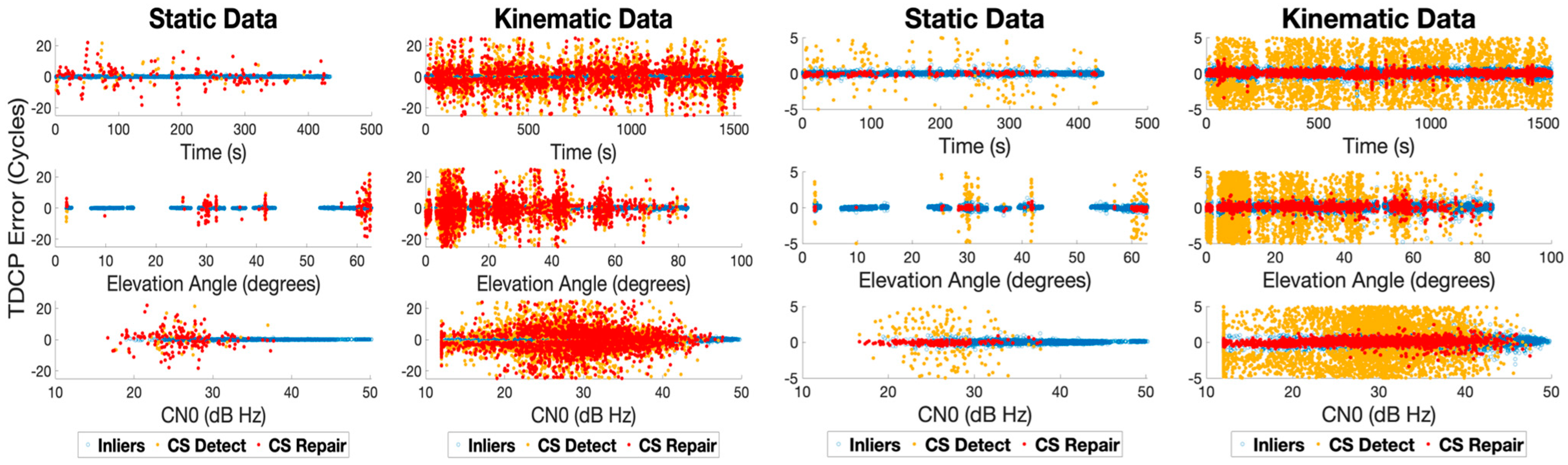
- CS detection: GB-CSD based on statistical testing will not flag CSs at a lower elevation angle and , since the estimated variance will be large. If the TDCP measurement is afflicted with CSs, hypothesis testing will allow the measurement to pass, as it will believe that the measurement will be de-weighted during estimation, causing a misdetection/ Type-II error.
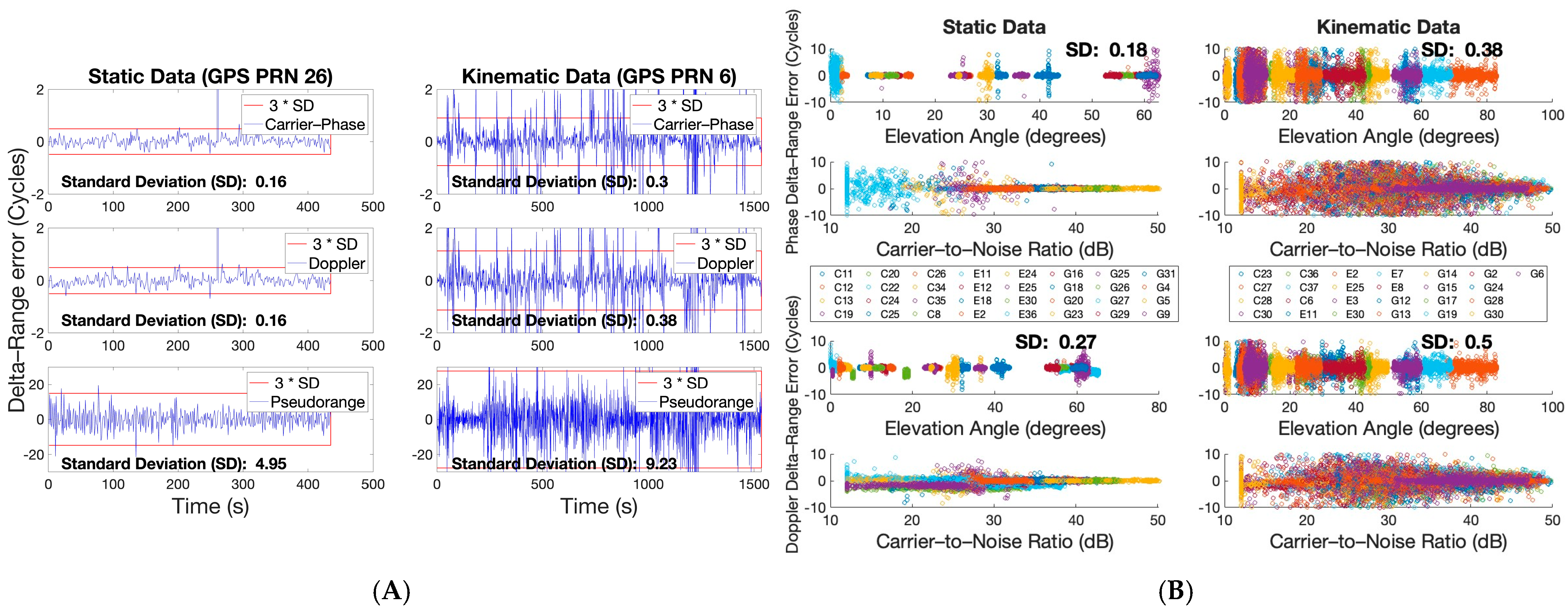
- CS Repair: The integer ambiguity resolution/fix is highly dependant on the variance of the TDCP measurement. Weighted variance mapping will produce large variance, in general, for TDCP measurements that do not necessarily have much noise associated with them, with reference to the static data plot in Figure 1B. Satellites at lower elevation angles or with lower are prone to losing phase lock frequently, but that does not necessarily deteriorate the precision of the phase measurements.
7. Experimental Results
8. Conclusions and Future Scope
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results. Measurement 2021, 175, 109162. [Google Scholar] [CrossRef]
- Goad, C.C. Precise positioning with the GPS. In Lecture Notes in Earth Sciences; Turner, S., Ed.; Springer: Berlin/Heidelberg, Germany, 1987; Volume 12, pp. 17–30. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Bastos, L.; Landau, H. Fixing cycle slips in dual-frequency kinematic GPS-applications using Kalman filtering. Manuscripta Geod. 1988, 13, 249–256. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer: Berlin/Heidelberg, Germany, 1994. [Google Scholar]
- Zuofa, Y.G.L. Cycle Slip Detection and Ambiguity Resolution Algorithms for Dual-Frequency GPS Data Processing. Mar. Geod. 1999, 22, 169–181. [Google Scholar] [CrossRef]
- Bisnath, S.B. Efficient, automated cycle-slip correction of dual-frequency kinematic GPS data. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 145–154. [Google Scholar]
- Fath-Allah, T.F. A new approach for cycle slips repairing using GPS single frequency data. World Appl. Sci. J. 2010, 8, 315–325. [Google Scholar]
- Liu, Z. A new automated cycle slip detection and repair method for a single dual-frequency GPS receiver. J. Geod. 2011, 85, 171–183. [Google Scholar] [CrossRef]
- Kim, D.; Langley, R.B. Instantaneous Real-Time Cycle-Slip Correction for Quality Control of GPS Carrier-Phase Measurements. Navigation 2002, 49, 205–222. [Google Scholar] [CrossRef]
- Ren, Z.; Li, L.; Zhong, J.; Zhao, M. Instantaneous Cycle-Slip Detection and Repair of GPSData Based on Doppler Measurement. Int. J. Inf. Electron. Eng. 2012, 2, 96. [Google Scholar] [CrossRef]
- Zhao, J.; Hernández-Pajares, M.; Li, Z.; Wang, L.; Yuan, H. High-rate Doppler-aided cycle slip detection and repair method for low-cost single-frequency receivers. Gps Solut. 2020, 24, 1–13. [Google Scholar] [CrossRef]
- de Lacy, M.C.; Reguzzoni, M.; Sansò, F.; Venuti, G. The Bayesian detection of discontinuities in a polynomial regression and its application to the cycle-slip problem. J. Geod. 2008, 82, 527–542. [Google Scholar] [CrossRef]
- Zangeneh-Nejad, F.; Amiri-Simkooei, A.R.; Sharifi, M.A.; Asgari, J. Cycle slip detection and repair of undifferenced single-frequency GPS carrier phase observations. GPS Solut. 2017, 21, 1593–1603. [Google Scholar] [CrossRef]
- Leick, A. GPS Satellite Surveying, 2nd ed.; Wiley-Interscience: New York, NY, USA, 1995. [Google Scholar]
- Teunissen, P. Quality Control and GPS. In GPS for Geodesy; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar] [CrossRef]
- Kubo, Y.; Sone, K.; Sugimoto, S. Cycle slip detection and correction for kinematic GPS based on statistical tests of innovation processes. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004; pp. 1438–1447. [Google Scholar]
- Lin, S.-G.; Yu, F.-C. Cycle slips detection algorithm for low cost single frequency GPS RTK positioning. Surv. Rev. 2013, 45, 206–214. [Google Scholar] [CrossRef]
- Banville, S.; Langley, R.B. Cycle-slip correction for single-frequency PPP. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 3753–3761. [Google Scholar]
- Li, P.; Jiang, X.; Zhang, X.; Ge, M.; Schuh, H. Kalman-filter-based undifferenced cycle slip estimation in real-time precise point positioning. GPS Solut. 2019, 23, 1–13. [Google Scholar] [CrossRef]
- Kirkko-Jaakkola, M.; Traugott, J.; Odijk, D.; Collin, J.; Sachs, G.; Holzapfel, F. A RAIM approach to GNSS outlier and cycle slip detection using L1 carrier phase time-differences. In Proceedings of the 2009 IEEE Workshop on Signal Processing Systems, Tampere, Finland, 7–9 October 2009; pp. 273–278. [Google Scholar]
- Li, T.; Melachroinos, S. An enhanced cycle slip repair algorithm for real-time multi-GNSS, multi-frequency data processing. GPS Solut. 2019, 23, 1–11. [Google Scholar] [CrossRef]
- Carcanague, S. Real-time geometry-based cycle slip resolution technique for single-frequency PPP and RTK. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 1136–1148. [Google Scholar]
- Banville, S.; Langley, R.B. Instantaneous Cycle-Slip Correction for Real-Time PPP Applications. Navigation 2010, 57, 325–334. [Google Scholar] [CrossRef]
- Li, B.; Liu, T.; Nie, L.; Qin, Y. Single-frequency GNSS cycle slip estimation with positional polynomial constraint. J. Geod. 2019, 93, 1781–1803. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Carrier Phase Integer Ambiguity Resolution. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerlands, 2017; pp. 661–685. [Google Scholar] [CrossRef]
- SmartphonesCampaign2021.docx. Google Docs. Available online: https://docs.google.com/document/d/1XlQ9uarBDJEGsWOOHjYiPXkg4W3AH9qc/edit?usp=embed_facebook (accessed on 9 May 2024).
- Fu, G.; Khider, M.; van Diggelen, F. Google Smartphone Decimeter Challenge. May 2021. Available online: https://www.kaggle.com/c/google-smartphone-decimeter-challenge/data (accessed on 9 May 2024).
- Verhagen, S.; Li, B. LAMBDA Software Package: Matlab Implementation; Version 3.0; Delft University of Technology and Curtin University: Perth, Australia, 2012. [Google Scholar]
- Tay, S.; Marais, J. Weighting models for GPS Pseudorange observations for land transportation in urban canyons. In Proceedings of the 6th European Workshop on GNSS Signals and Signal Processing, Munich, Germany, 5–6 December 2013. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Static Dataset | Kinematic Dataset | ||||||
|---|---|---|---|---|---|---|---|
| Inliers | CS detected | CS repaired | Inliers | CS detected | CS repaired | ||
| 10,249 | 213 | 167 | 30,301 | 5420 | 2200 | ||
| CS detection rate | CS repair rate | CS detection rate | CS repair rate | ||||
| 2.08% | 78.40% | 17.89% | 40.60% | ||||
| Static Dataset | ||||||||
|---|---|---|---|---|---|---|---|---|
| Epoch | CS Detected | CS Repaired | Float CS Ambiguity | Fixed CS Ambiguity | Type of Repair | Success Rate LB | Ratio | |
| 17 | G23, C24 | G23, C24 | [1.968, 5.93] | [2, 6] | FAR | 91.94% | 0.325 | 0.006 |
| 28 | E25 | E25 | [1.343] | [1] | FAR | 95.2% | 0.401 | 0.274 |
| 97 | G31, C25 | C25 | [−2.399, 2.951] | [3] | PAR | 96.1% | 0.486 | 0.003 |
| 327 | C34 | - | [−2.478] | - | - | 96% | 0.448 | 0.843 |
| Kinematic Dataset | ||||||||
| Epoch | CS Detected | CS Repaired | Float CS Ambiguity | Fixed CS Ambiguity | Type of Repair | Success Rate LB | FF-RT-Derived | Ratio |
| 42 | G30, E2 | G30, E2 | [1.939, 3.034] | [2, 3] | FAR | 87.77% | 0.246 | 0.005 |
| 55 | G6, G13, G14, G15, G17, G30, E7, E30, C6, C23, C27, C28, C36 | G6, G13, G14, G15, G17, G30, E7, E30, C27, C28 | [−3.35, 1.11, −1.24, 0.84, 0.96, −2.18, 28.25, 0.77, 6.58, −7.78, 0.82, 3.89, 2.01] | [−3, 1, −1, 1, 1, −2, 28, 1, 1, 4] | PAR | 50.59% | 0.55 | 0.54 |
| 120 | G19, G30, E8, C6 | G19, E8 | [−0.795, −1.639, −31.989, 5.88] | [−1, −32] | PAR | 89.58% | 0.328 | 0.066 |
| 458 | G13, E11, E30, C6, C36 | G13, E11, E30, C36 | [3.852, 14.95, 2.065, 5.641, 3.162] | [4, 15, 2, 3] | PAR | 77.44% | 0.246 | 0.077 |
| 1005 | G14, G15, G28, E7, E8 | G14, G15, G28, E7, E8 | [1.765, −6.039, 5.016, 15.899, −2.119] | [2, −6, 5, 16, −2] | FAR | 70.58% | 0.216 | 0.126 |
| Note: For PAR, float CS ambiguities which are not fixed to an integer still are adjusted due to other fixed ambiguities. For FF-RT, the fixed failure rate is taken as 1%. | ||||||||
| Static Data | Kinematic Data | |||
|---|---|---|---|---|
| Method/RMSE (mm/s) | Doppler-Only KF | Proposed CSDR Method | Doppler-Only KF | Proposed CSDR Method |
| East | 33.90 | 6.51 | 62.26 | 33.75 |
| North | 44.82 | 44.80 | 99.92 | 71.40 |
| Up | 92.53 | 27.73 | 89.43 | 90.08 |
| 2D Error | 56.20 | 45.27 | 117.73 | 78.98 |
| 3D Error | 108.26 | 53.09 | 147.85 | 119.80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agarwal, N.; O’Keefe, K. Hybrid Cycle Slip Detection Method for Smartphone Global Navigation Satellite System. Eng. Proc. 2025, 88, 10. https://doi.org/10.3390/engproc2025088010
Agarwal N, O’Keefe K. Hybrid Cycle Slip Detection Method for Smartphone Global Navigation Satellite System. Engineering Proceedings. 2025; 88(1):10. https://doi.org/10.3390/engproc2025088010
Chicago/Turabian StyleAgarwal, Naman, and Kyle O’Keefe. 2025. "Hybrid Cycle Slip Detection Method for Smartphone Global Navigation Satellite System" Engineering Proceedings 88, no. 1: 10. https://doi.org/10.3390/engproc2025088010
APA StyleAgarwal, N., & O’Keefe, K. (2025). Hybrid Cycle Slip Detection Method for Smartphone Global Navigation Satellite System. Engineering Proceedings, 88(1), 10. https://doi.org/10.3390/engproc2025088010