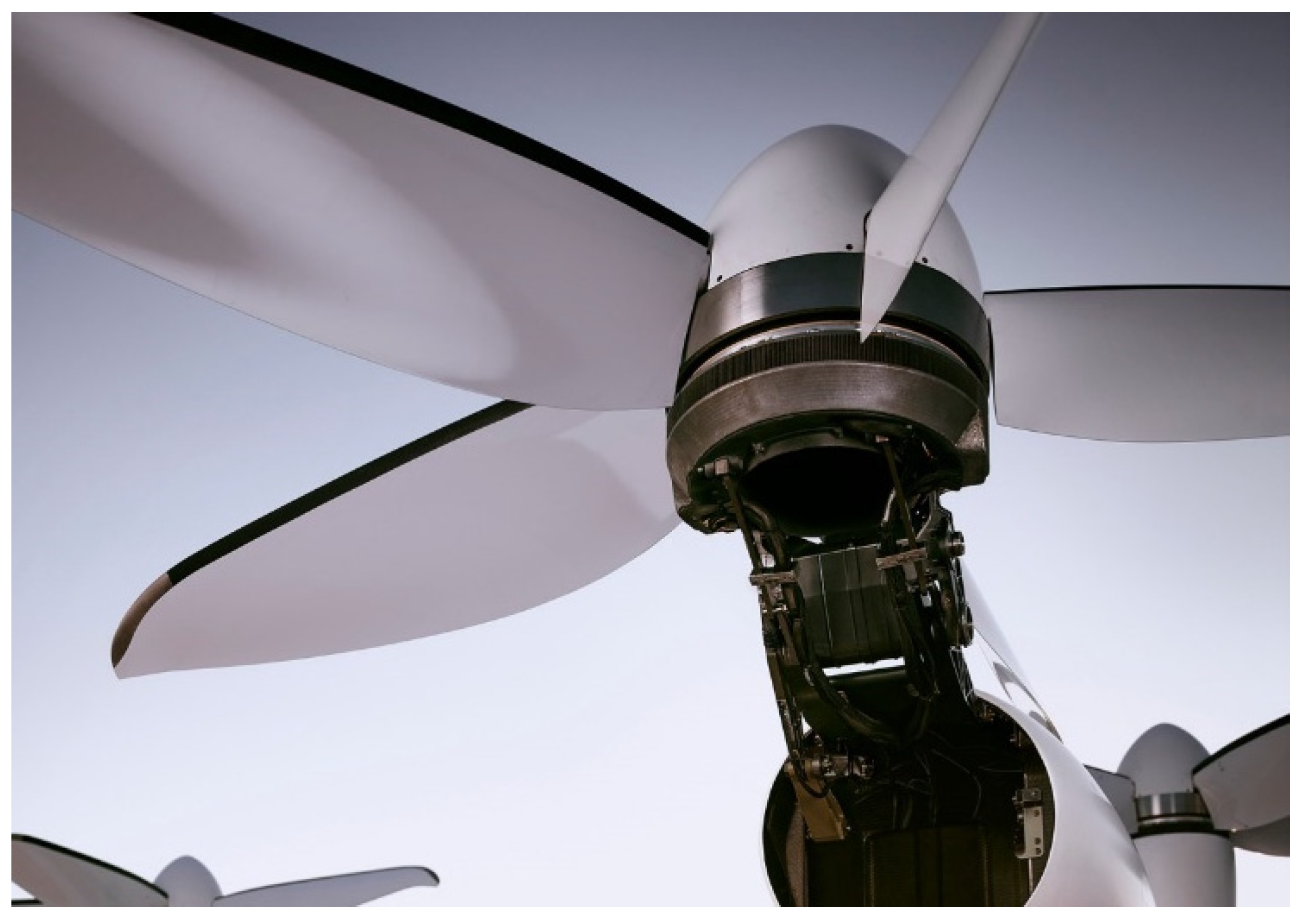
Figure 1.
Schematic diagram of Joby electric propulsion tilting mechanism.
Figure 1.
Schematic diagram of Joby electric propulsion tilting mechanism.
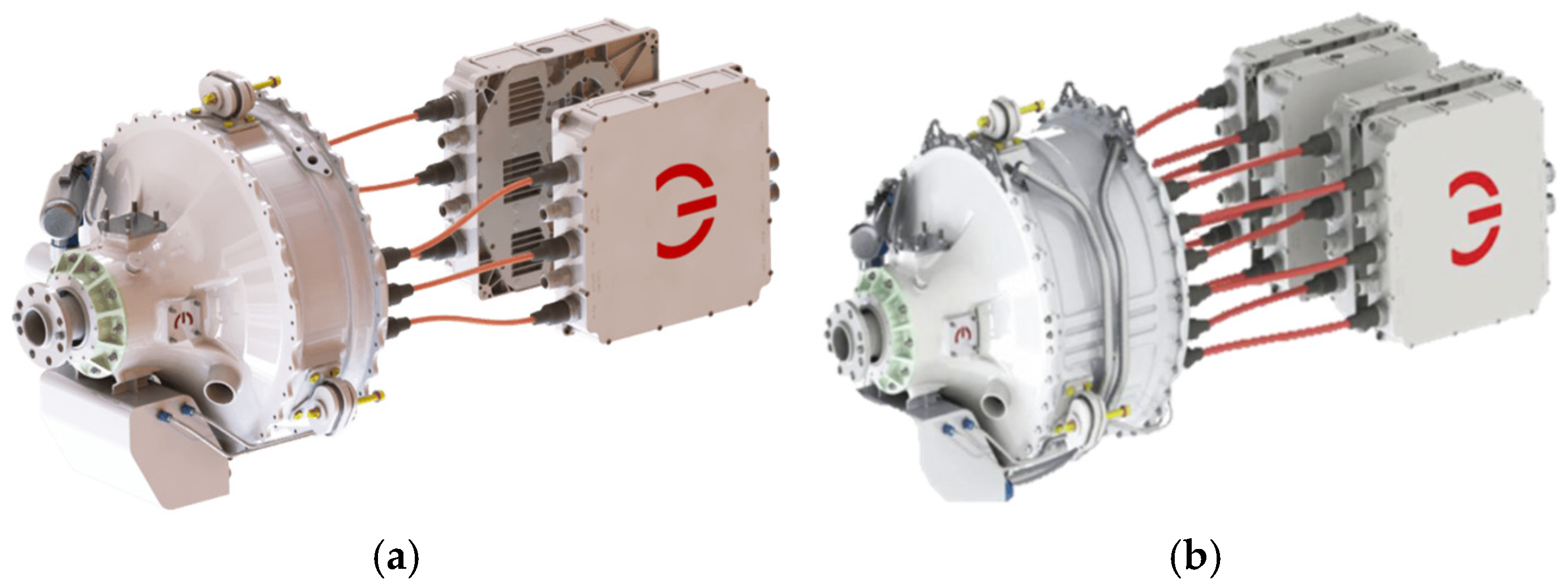
Figure 2.
Schematic of Magnix’s electric propulsion system, (a) magni250, (b) magni500.
Figure 2.
Schematic of Magnix’s electric propulsion system, (a) magni250, (b) magni500.
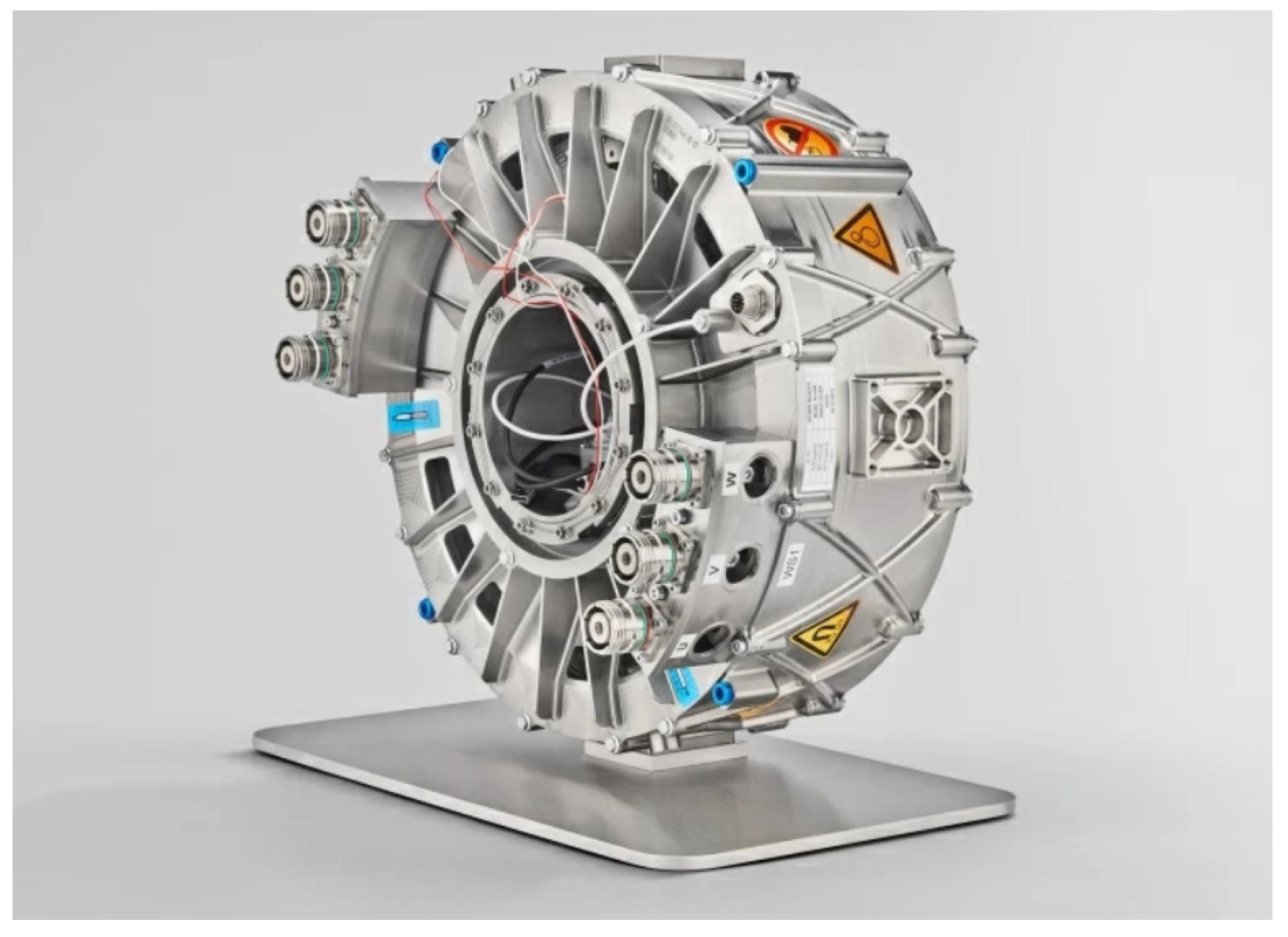
Figure 3.
Schematic diagram of Safran ENGINeUSTM electric propulsion.
Figure 3.
Schematic diagram of Safran ENGINeUSTM electric propulsion.
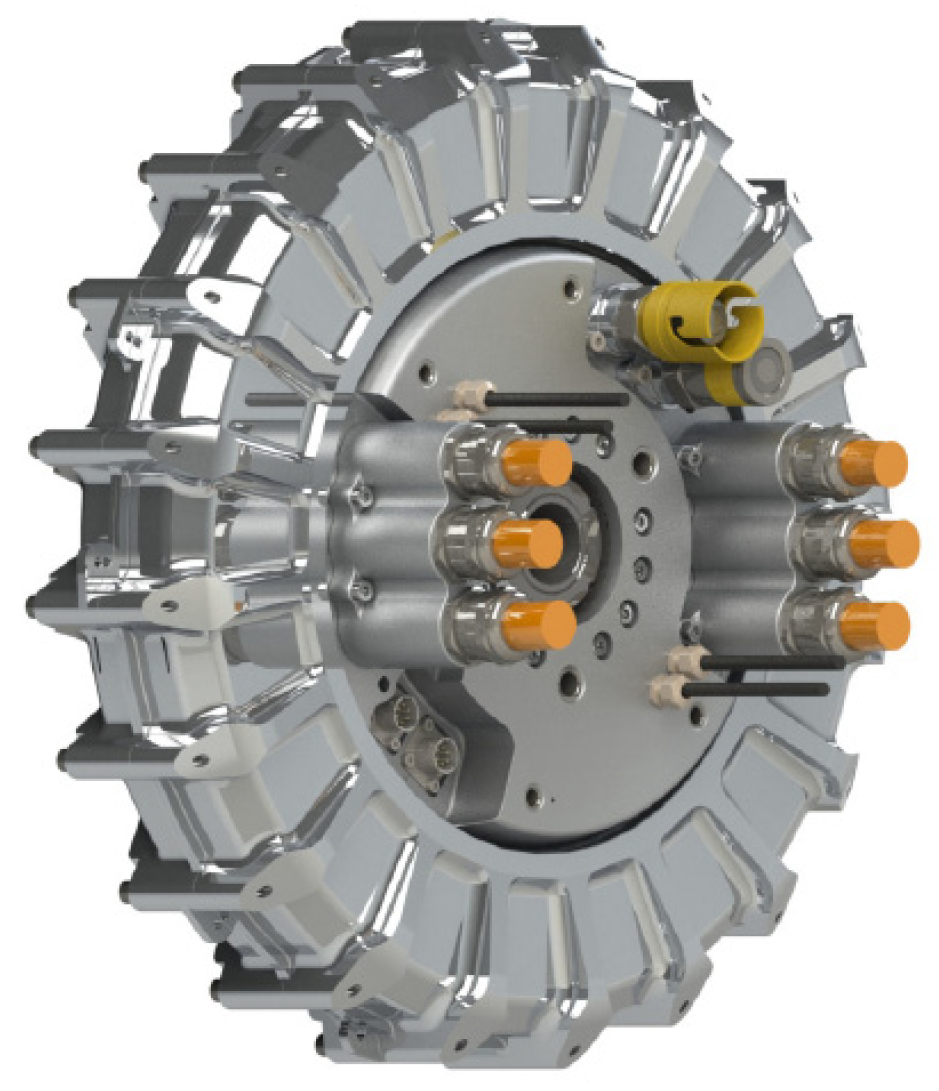
Figure 4.
SP260D motors from Siemens AG.
Figure 4.
SP260D motors from Siemens AG.
Figure 5.
Schematic diagram of HPDM series motors from H3X Corporation.
Figure 5.
Schematic diagram of HPDM series motors from H3X Corporation.
Figure 6.
Schematic of EMRAX specialized products.
Figure 6.
Schematic of EMRAX specialized products.
Figure 7.
Schematic diagram of D1500 axial flux motor.
Figure 7.
Schematic diagram of D1500 axial flux motor.
Figure 8.
Schematic representation of the Tianjin SANTROLL product spectrum.
Figure 8.
Schematic representation of the Tianjin SANTROLL product spectrum.
Figure 9.
Schematic diagram of Shandong Jingchuang motor and controller.
Figure 9.
Schematic diagram of Shandong Jingchuang motor and controller.
Figure 10.
Schematic diagram of Joby tilt-rotor mechanism.
Figure 10.
Schematic diagram of Joby tilt-rotor mechanism.
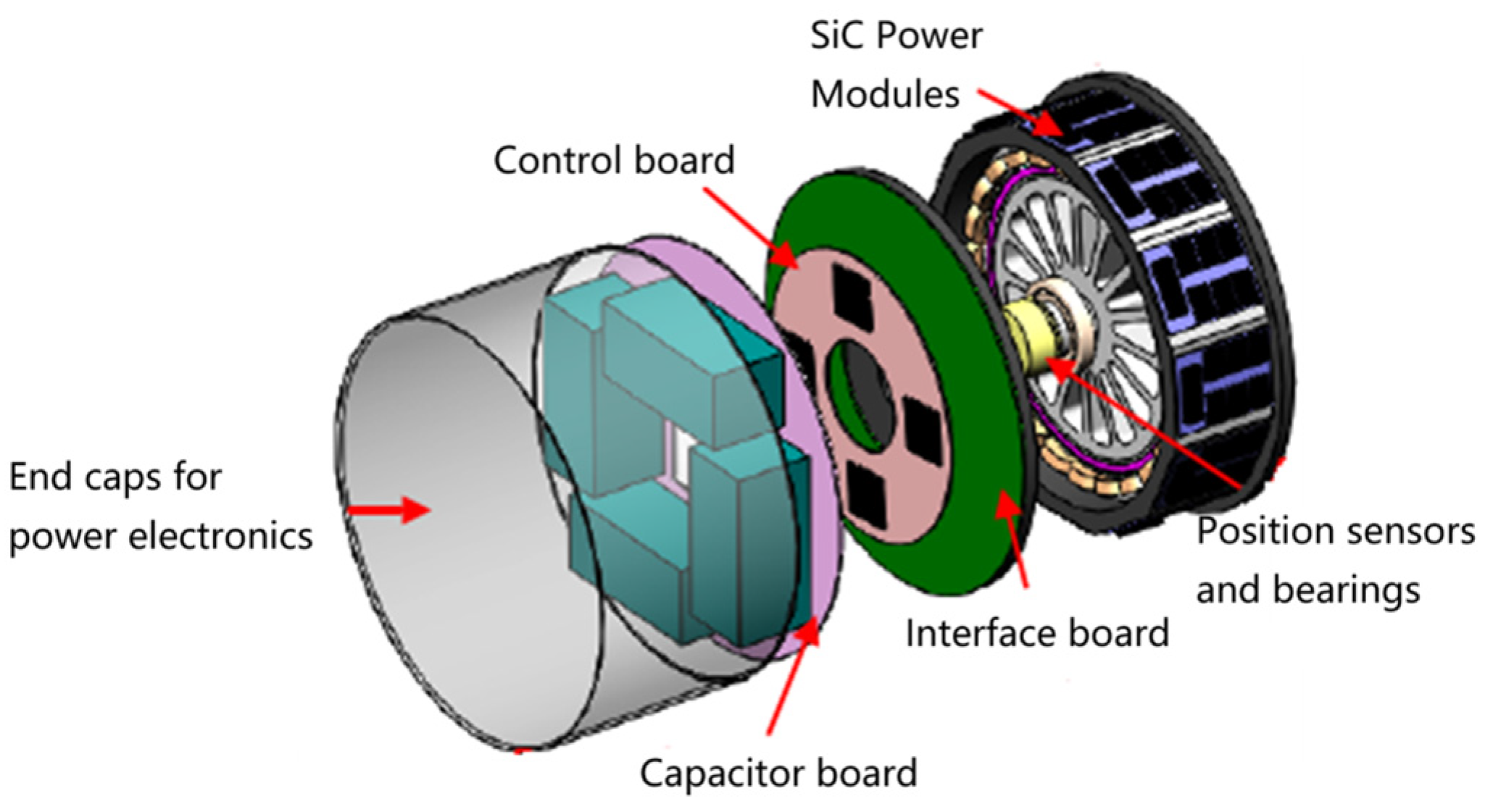
Figure 11.
Schematic diagram of the integrated motor drive system, (a) 3D model, (b) 2D model.
Figure 11.
Schematic diagram of the integrated motor drive system, (a) 3D model, (b) 2D model.
Figure 12.
Schematic of Honeywell’s electric propulsion system with integrated thermal management, (a) functional composition, (b) structure.
Figure 12.
Schematic of Honeywell’s electric propulsion system with integrated thermal management, (a) functional composition, (b) structure.
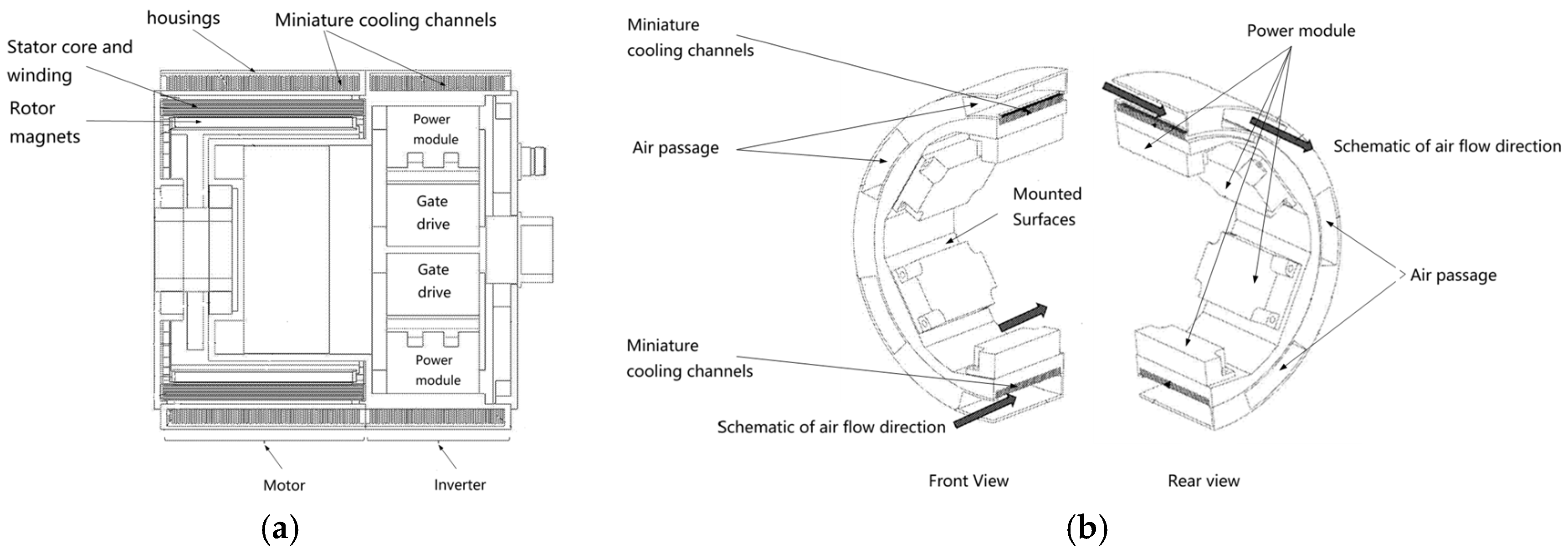
Figure 13.
Schematic diagram of the integrated structure of miniature heat dissipation channel, motor, and controller, (a) 2D model, (b) Power module air-cooling 3D model.
Figure 13.
Schematic diagram of the integrated structure of miniature heat dissipation channel, motor, and controller, (a) 2D model, (b) Power module air-cooling 3D model.
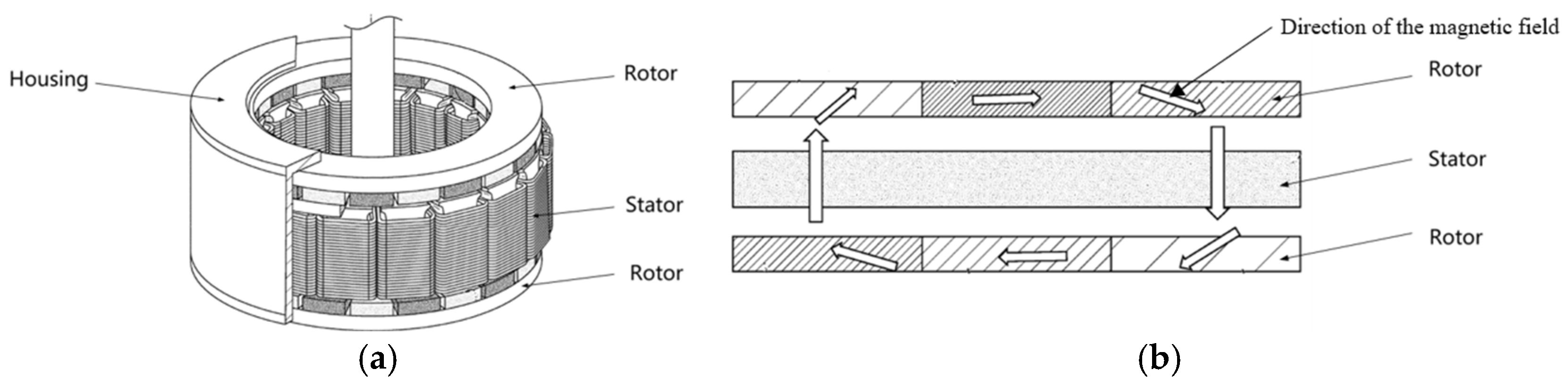
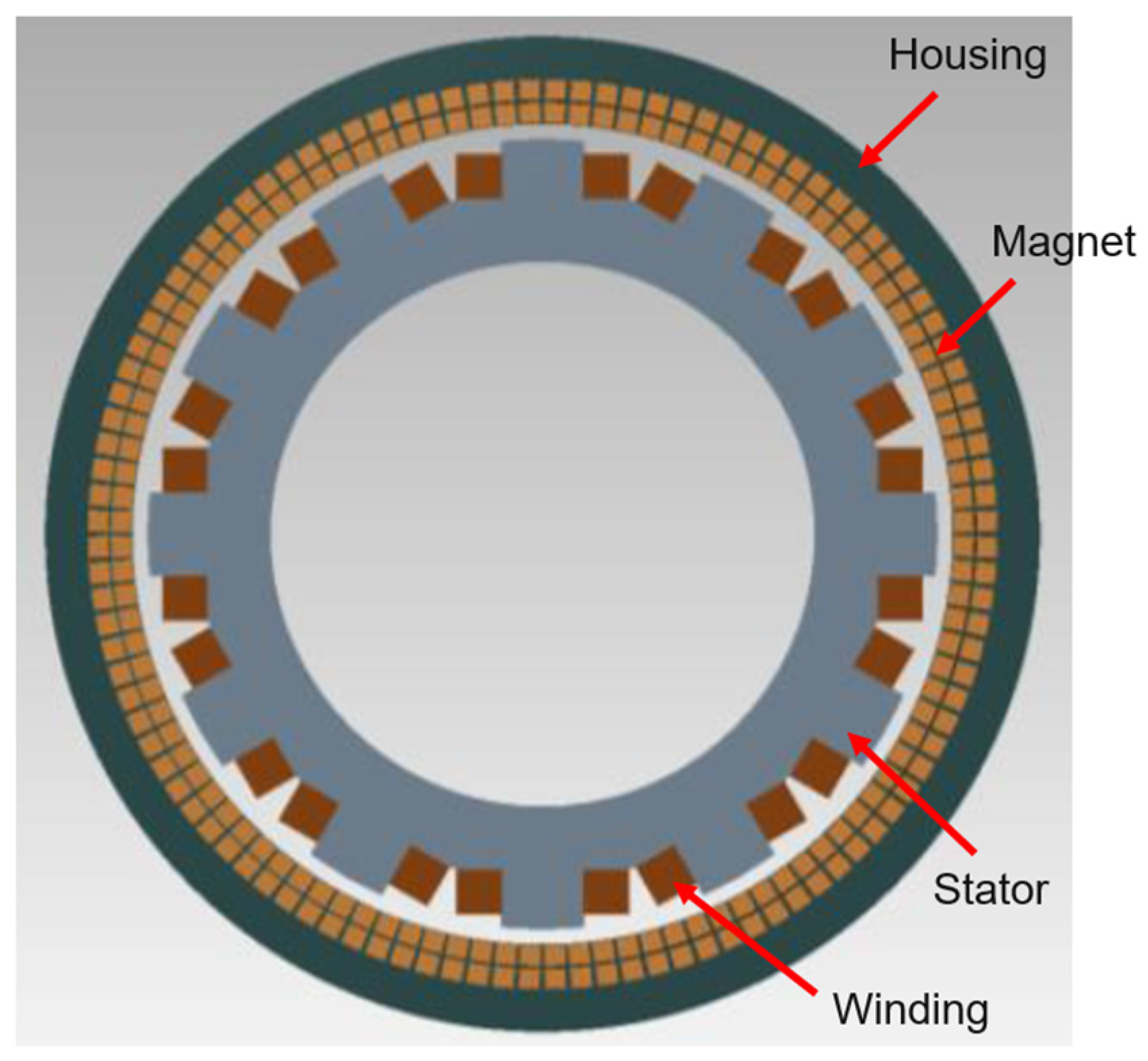
Figure 14.
Halbach polymagnetic axial field motors, (a) motor structure, (b) rotor Halbach polymagnetization.
Figure 14.
Halbach polymagnetic axial field motors, (a) motor structure, (b) rotor Halbach polymagnetization.
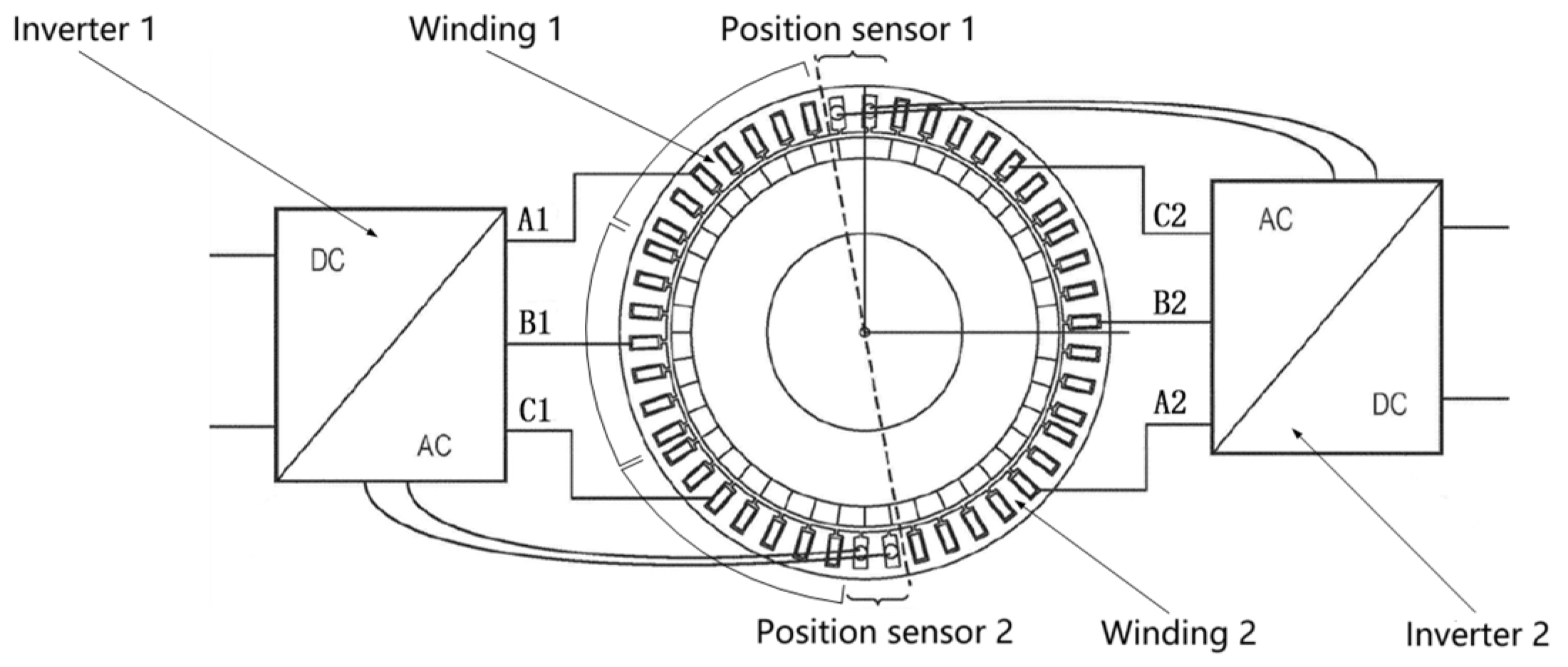
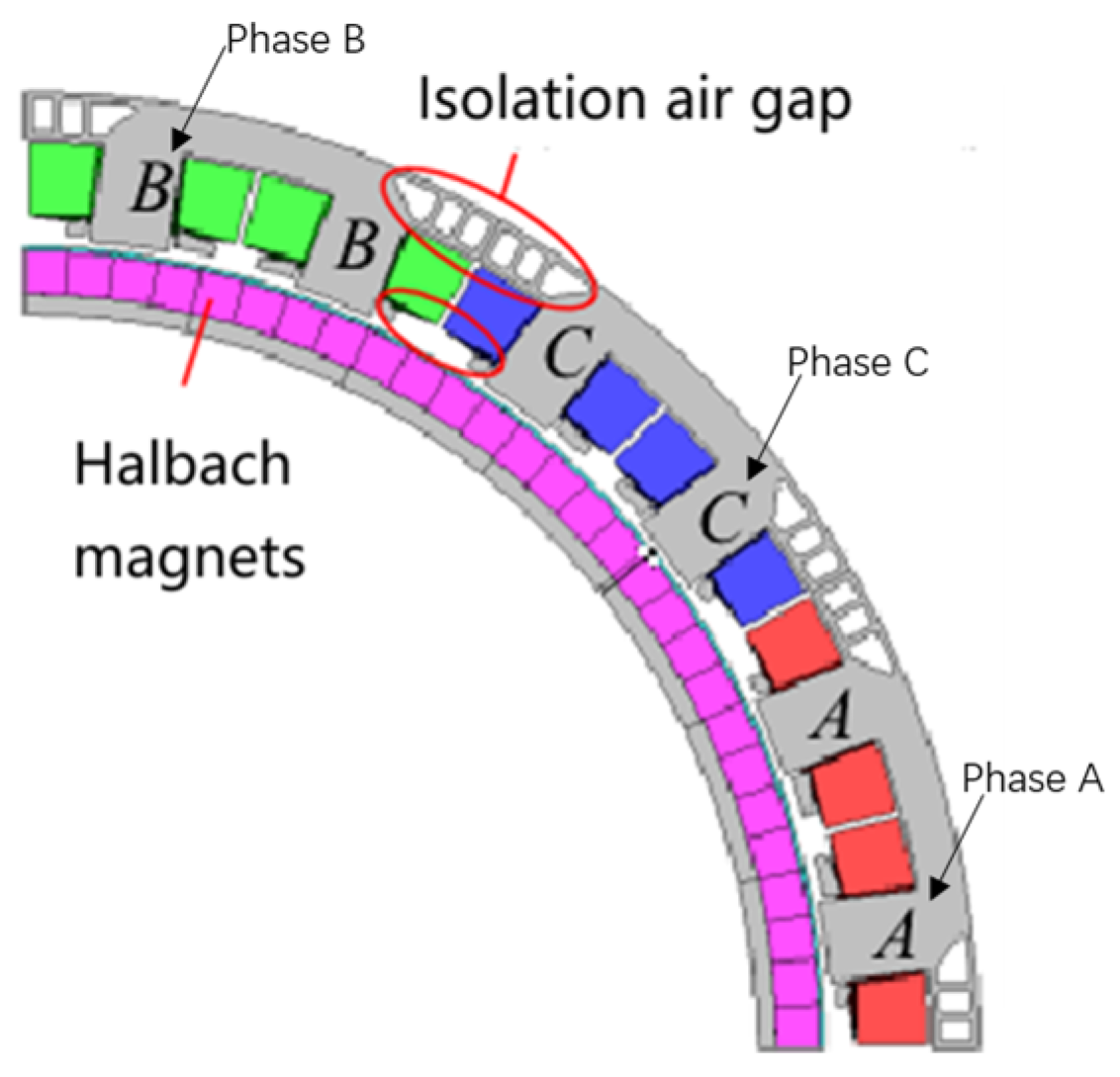
Figure 15.
Modular dual three-phase, dual position sensor motor structure.
Figure 15.
Modular dual three-phase, dual position sensor motor structure.
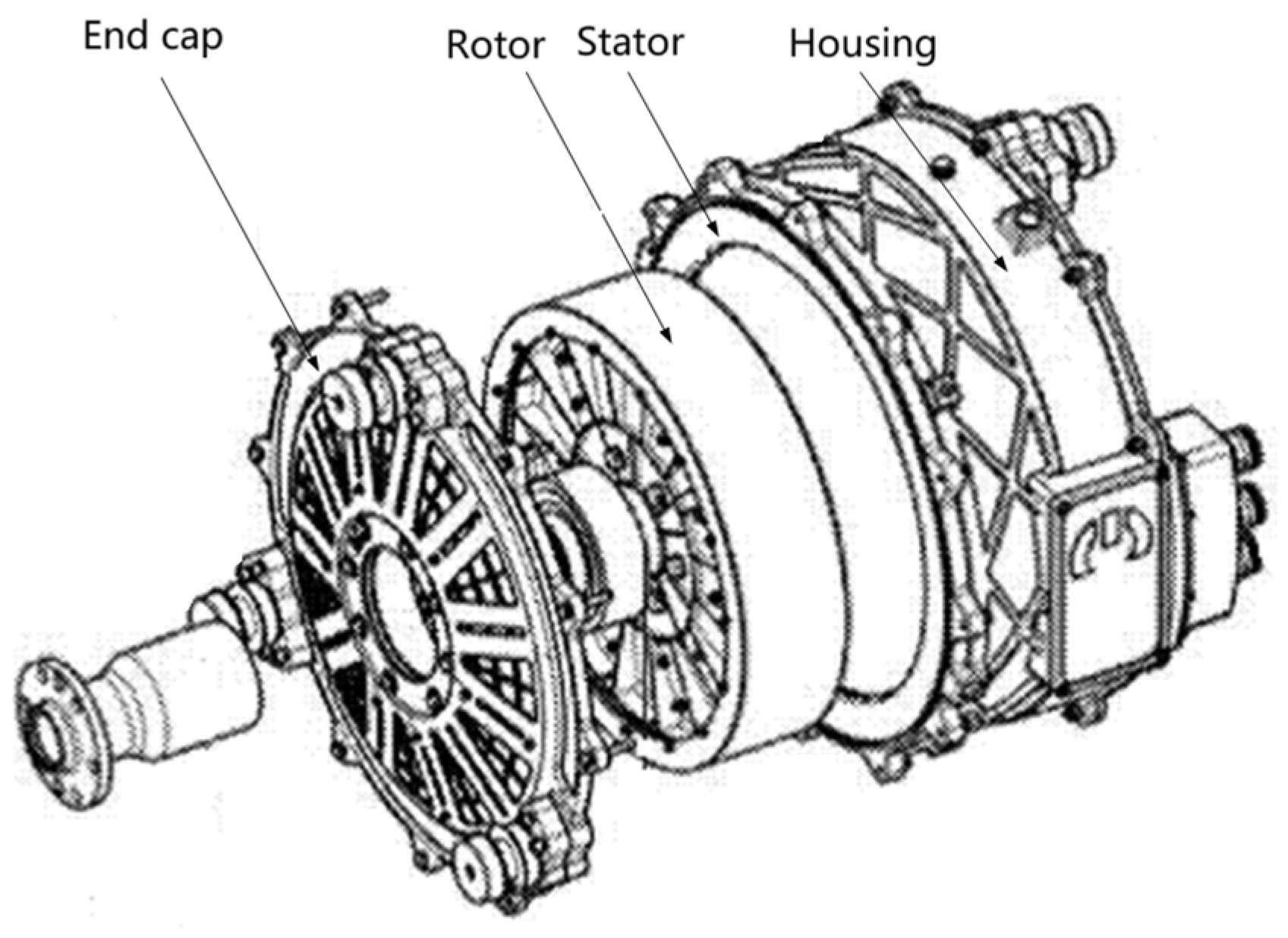
Figure 16.
Schematic construction of Magnix’s motor.
Figure 16.
Schematic construction of Magnix’s motor.
Figure 17.
Rotor structure of Magnix’s motors.
Figure 17.
Rotor structure of Magnix’s motors.
Figure 18.
Multi-layer cooling structure in the slot.
Figure 18.
Multi-layer cooling structure in the slot.
Figure 19.
Joby’s motors with integrated electrical busbar construction.
Figure 19.
Joby’s motors with integrated electrical busbar construction.
Figure 20.
Joby’s motors with in-slot cooling structure, (a) Radial, (b) Axial.
Figure 20.
Joby’s motors with in-slot cooling structure, (a) Radial, (b) Axial.
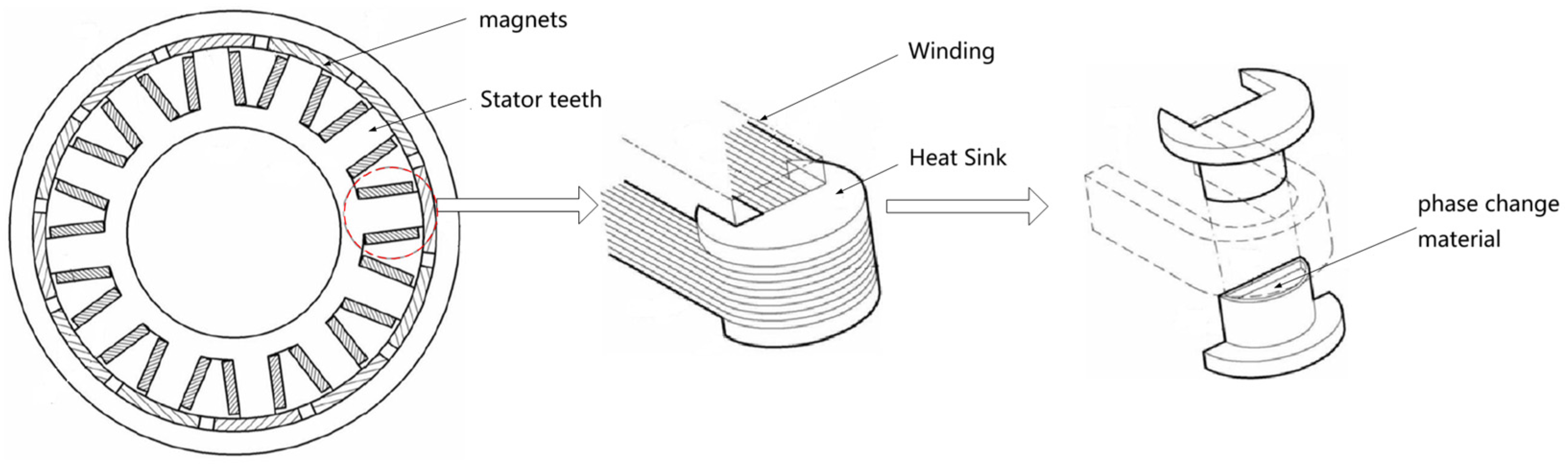
Figure 21.
Novel heat dissipation structure for winding ends based on phase change materials.
Figure 21.
Novel heat dissipation structure for winding ends based on phase change materials.
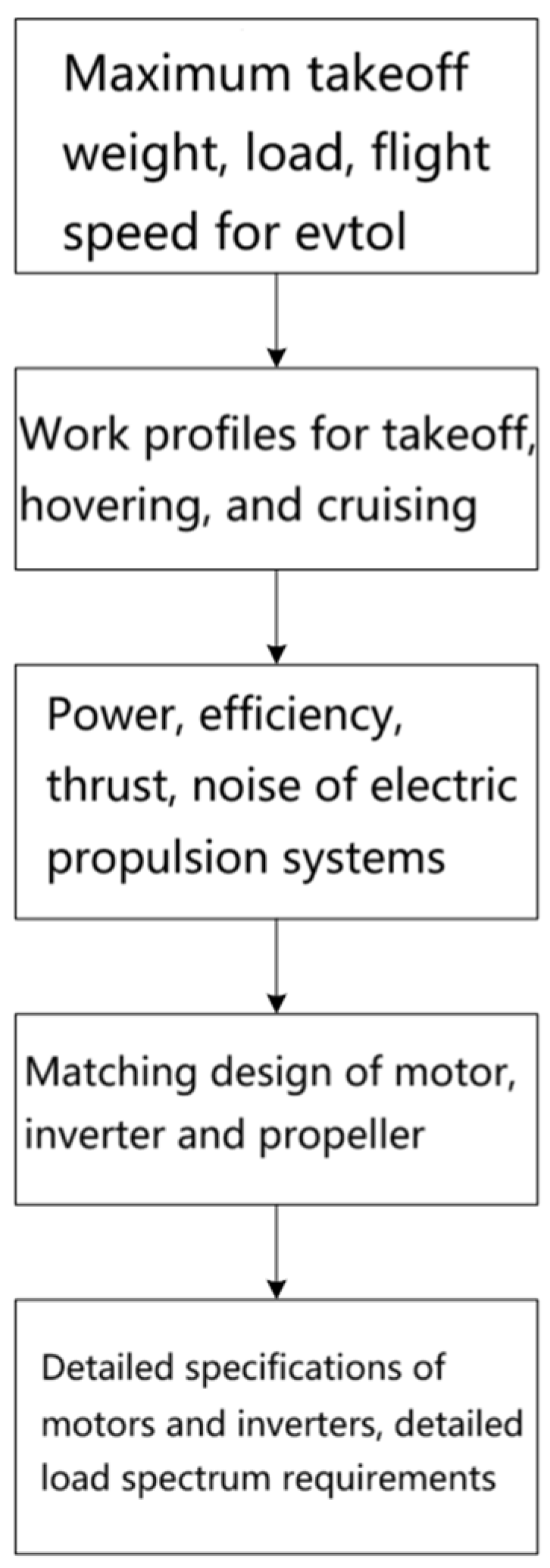
Figure 22.
Electric Propulsion Motor System Requirements Capture Process.
Figure 22.
Electric Propulsion Motor System Requirements Capture Process.
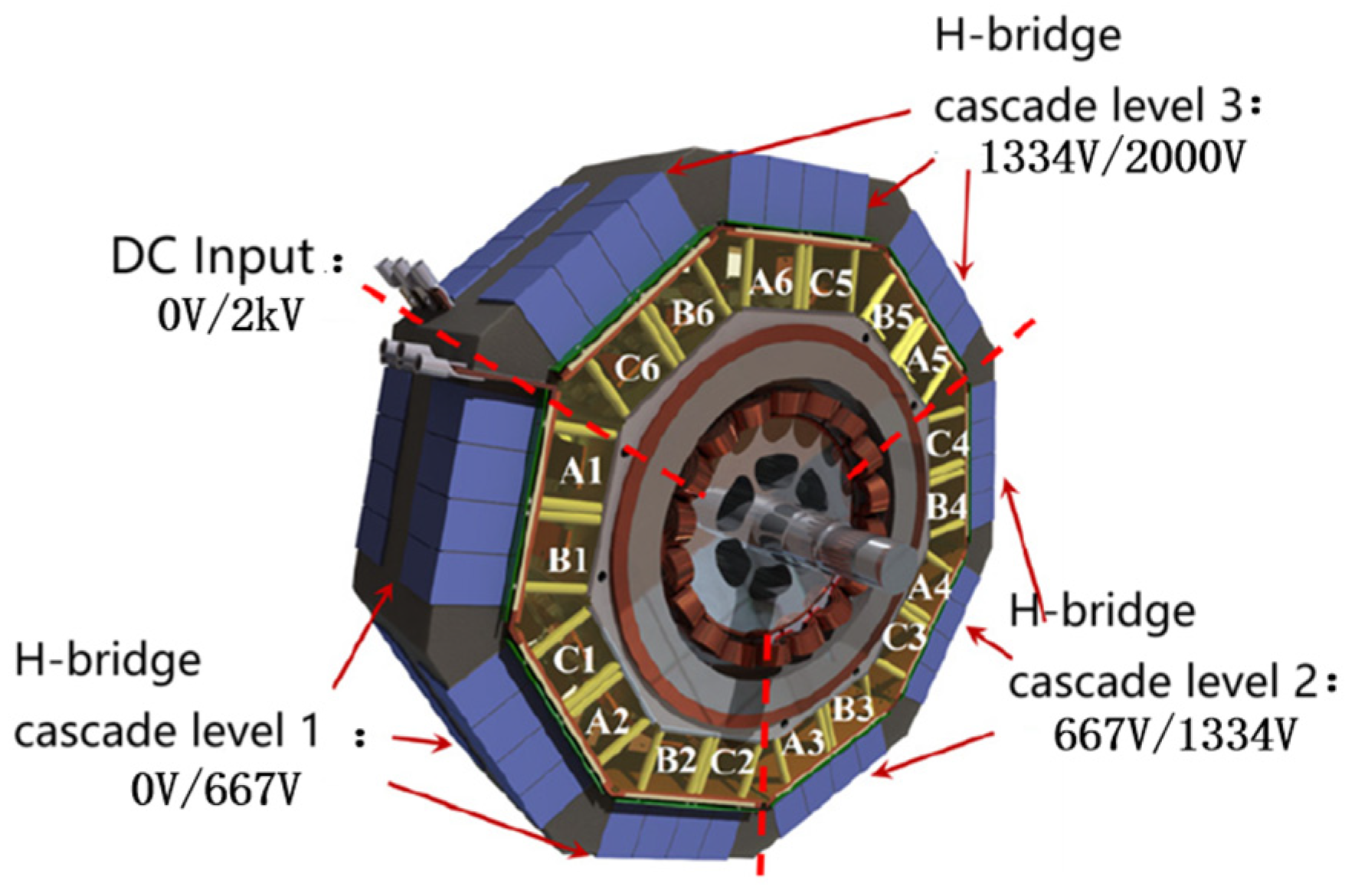
Figure 23.
2 kV, 1 MW integrated modular motor system.
Figure 23.
2 kV, 1 MW integrated modular motor system.
Figure 24.
Schematic diagram of the composition of a single stand-alone module.
Figure 24.
Schematic diagram of the composition of a single stand-alone module.
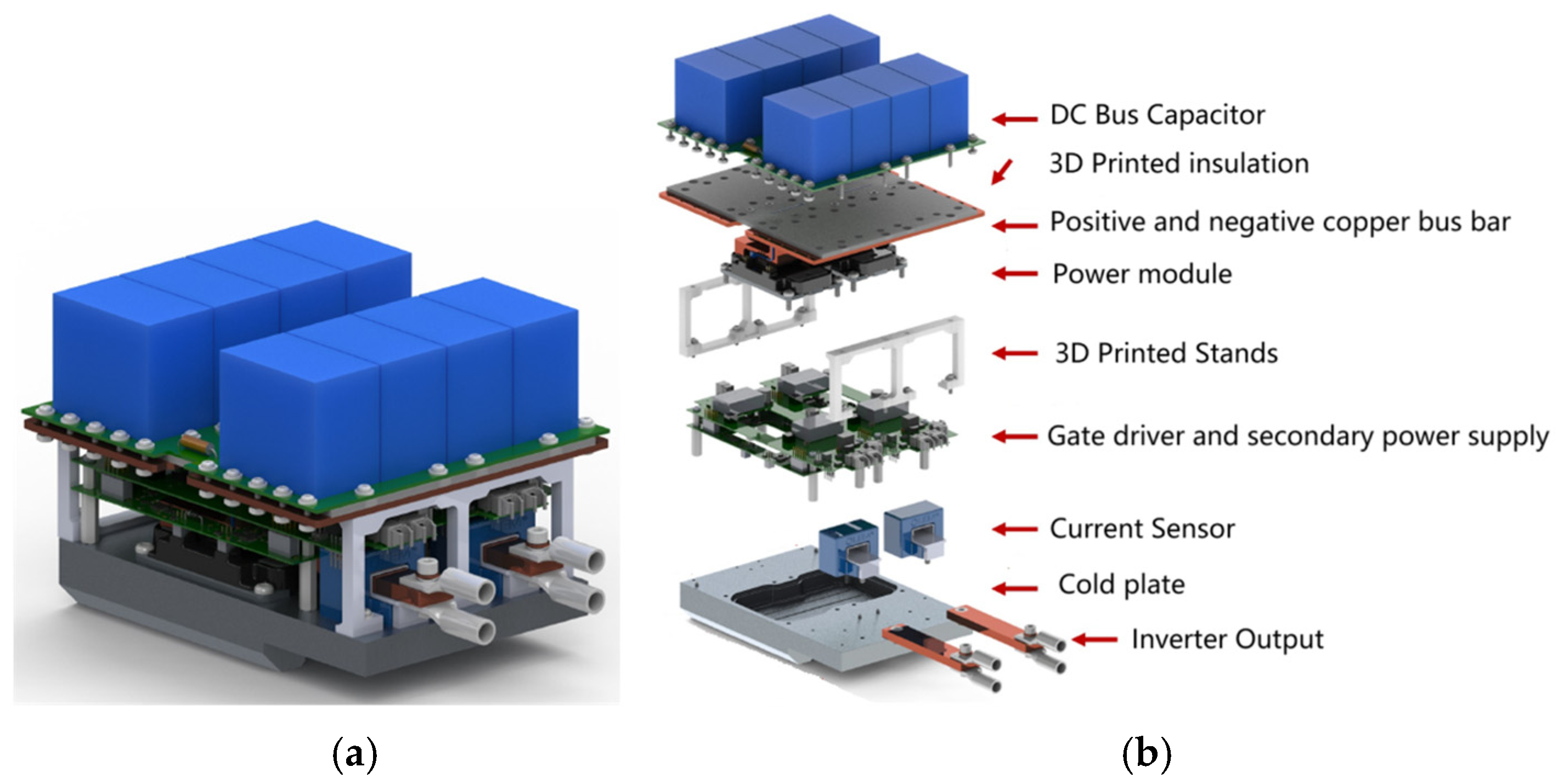
Figure 25.
Structure of an H-bridge inverter, (a) Entire machine, (b) Exploded View.
Figure 25.
Structure of an H-bridge inverter, (a) Entire machine, (b) Exploded View.
Figure 26.
Four-channel integrated, modular drive system.
Figure 26.
Four-channel integrated, modular drive system.
Figure 27.
1/4 Circumference Module for Fault Tolerant Motors.
Figure 27.
1/4 Circumference Module for Fault Tolerant Motors.
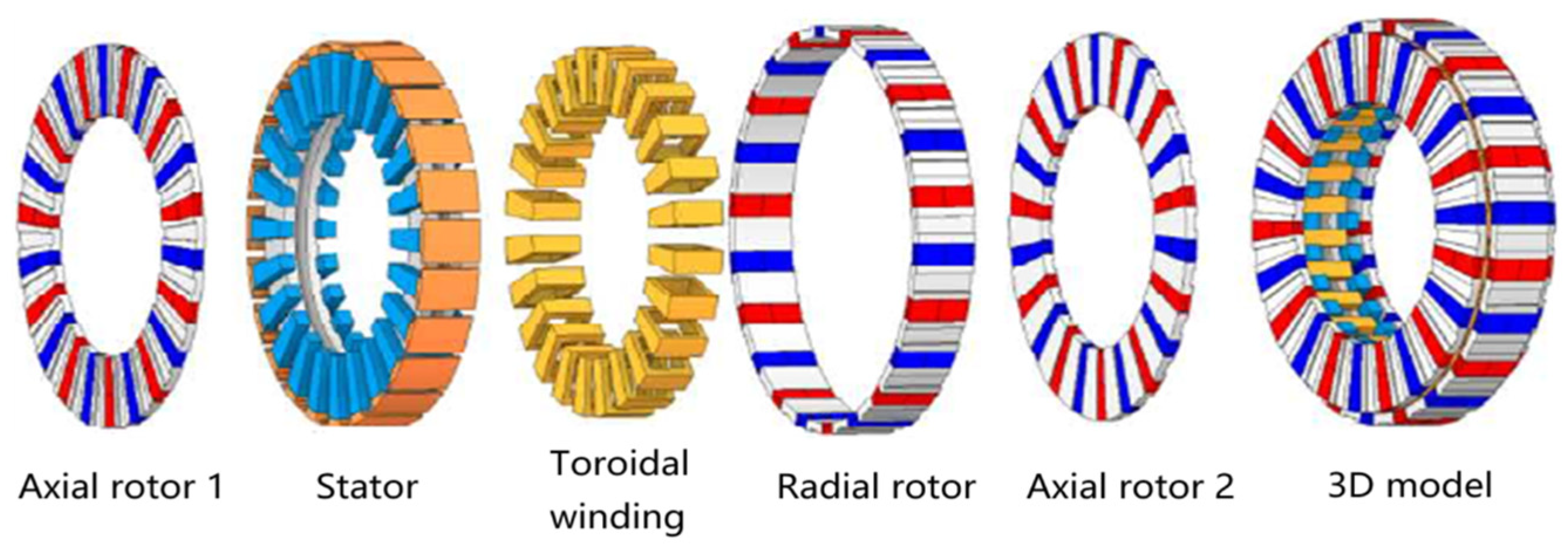
Figure 28.
Axial/radial hybrid magnetic field motors.
Figure 28.
Axial/radial hybrid magnetic field motors.
Figure 29.
1.4 MW superconducting motor.
Figure 29.
1.4 MW superconducting motor.
Figure 30.
Hollow wire schematic.
Figure 30.
Hollow wire schematic.
Figure 31.
3D-printed coils from additive drives, (a) coils, (b) stator and winding.
Figure 31.
3D-printed coils from additive drives, (a) coils, (b) stator and winding.
Figure 32.
3D-printed heat sink program design.
Figure 32.
3D-printed heat sink program design.
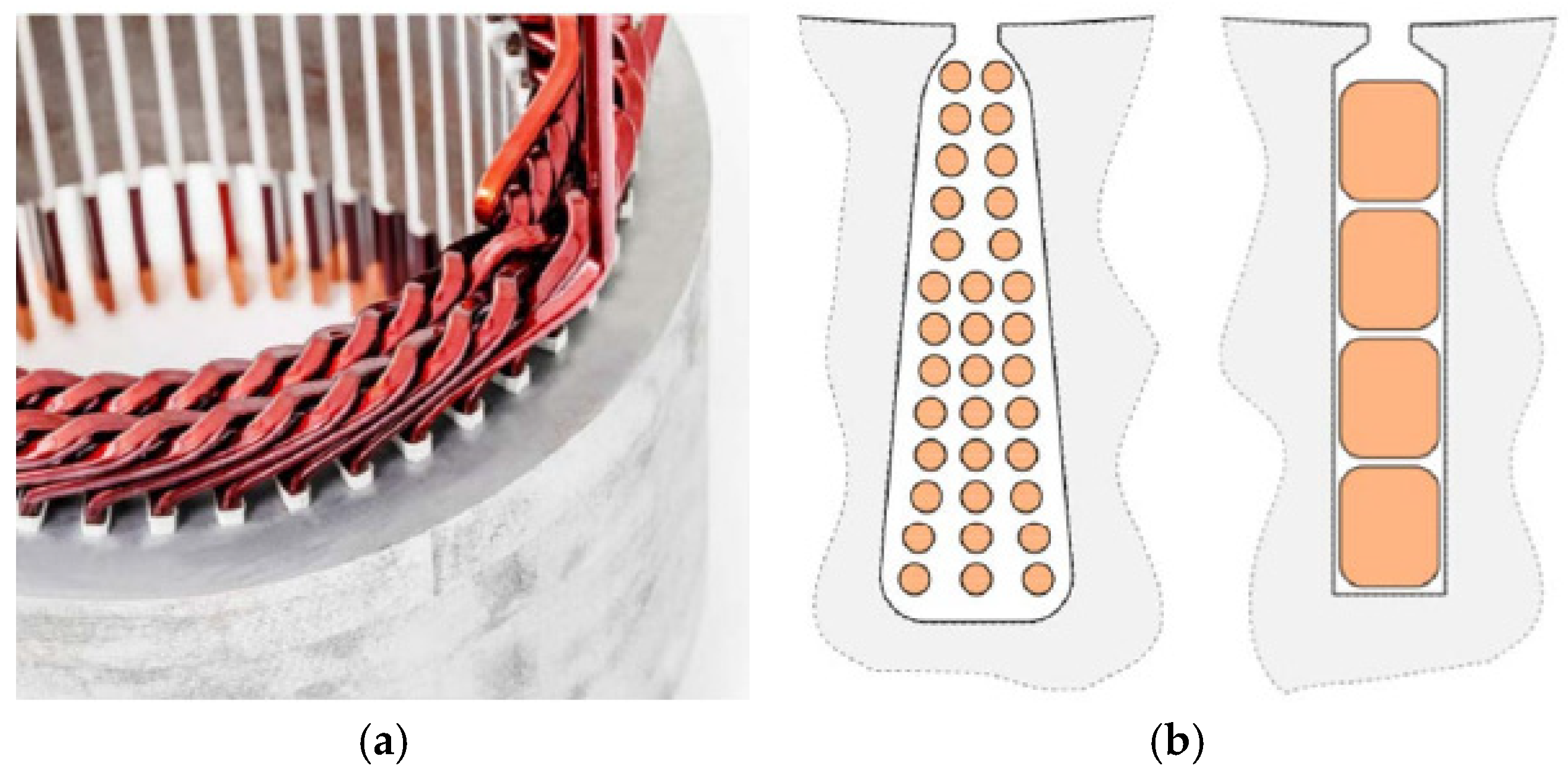
Figure 33.
Comparison of flat wire and round wire, (a) Flat wire stator, (b) Parallel tooth circular line (left) and parallel groove flat line (right).
Figure 33.
Comparison of flat wire and round wire, (a) Flat wire stator, (b) Parallel tooth circular line (left) and parallel groove flat line (right).
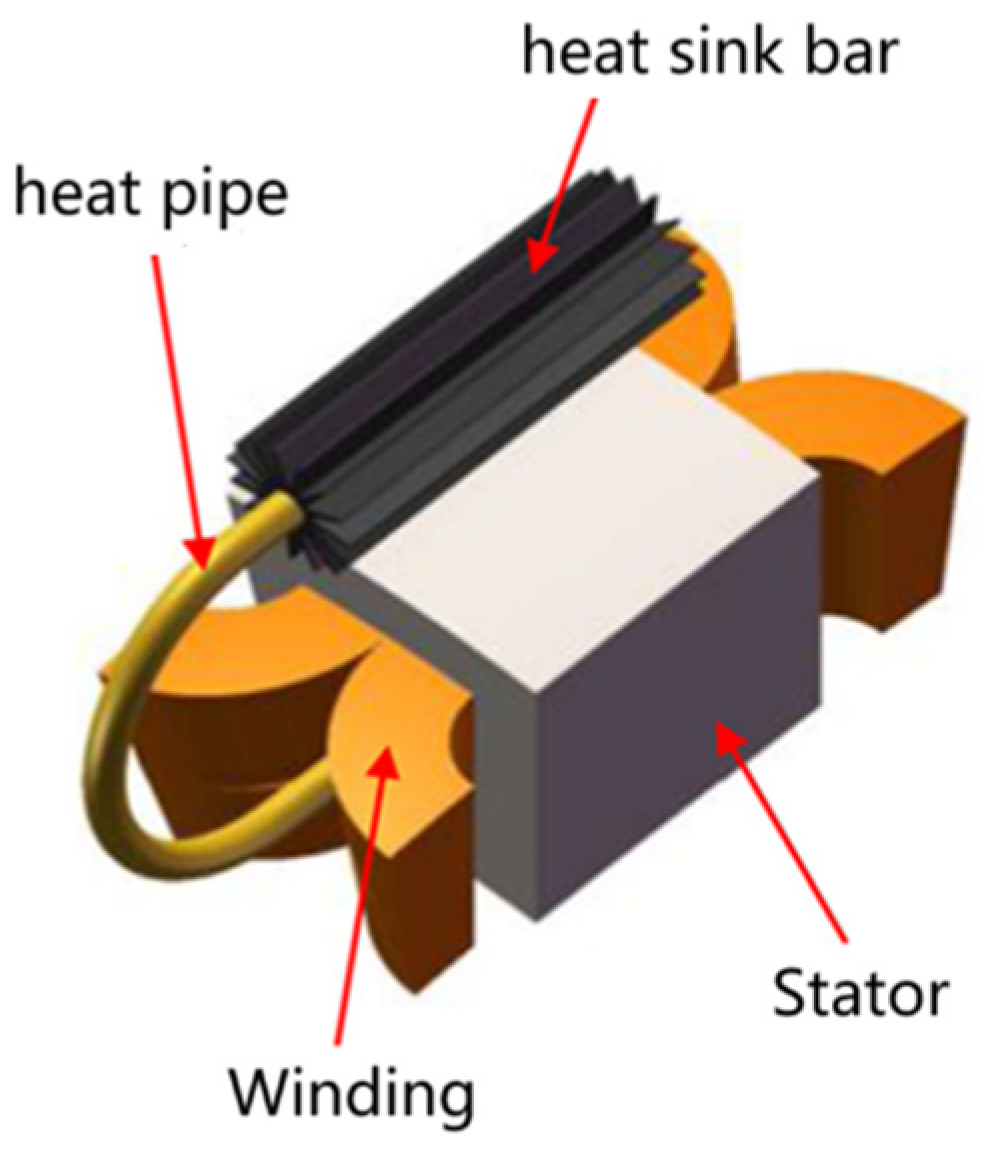
Figure 34.
Heat pipe cooling technology based on liquid-gas phase transition.
Figure 34.
Heat pipe cooling technology based on liquid-gas phase transition.
Table 1.
Parameters of Joby electric propulsion motors.
Table 1.
Parameters of Joby electric propulsion motors.
| Technical Indicators | Value |
|---|
| peak power [kW] | 236 |
| peak torque [Nm] | 1800 |
| rated torque [Nm] | 1380 |
| weights [kg] | 28 |
| rated torque density [Nm/kg] | 49 |
Table 2.
Parameters of the magni500 propulsion motor.
Table 2.
Parameters of the magni500 propulsion motor.
| Technical Indicators | Value |
|---|
| Rated voltage [V] | 540 |
| Voltage range [V] | 400–800 |
| Rated power [kW] | 560@1900 rpm |
| Peak (take-off) power [kW] | 640 |
| Rated torque [Nm] | 2814 |
| Maximum speed [rpm] | 3000 |
| Weights [kg] | 100–140 |
| Efficiency [%] | >93% |
| Number of three-phase winding sets | 4 |
Table 3.
Parameters of HPDM-250 motor.
Table 3.
Parameters of HPDM-250 motor.
| Technical Indicators | Value (Direct Drive) | Value (with Reducer) |
|---|
| Voltage range [V] | 300–900 |
| Rated power [kW] | 200 |
| Peak power [kW] | 250 |
| Rated torque [Nm] | 95.5 | 640 |
| Peak torque [Nm] | 119.4 | 800 |
| Weight (without coolant) [kg] | 13.0 | 16.6 |
| System efficiency(Takeoff) @200 kW | 93.4% | 92.2% |
| System efficiency(Cruise) @67 kW | 95.7% | 94.6% |
Table 4.
Parameters of the Emrax348 motor.
Table 4.
Parameters of the Emrax348 motor.
| Technical Indicators | Value (High Voltage) | Value (Low Voltage) |
|---|
| Maximum voltage [V] | 800 | 400 |
| Rated power [kW] | 100 | 200 |
| Peak power [kW] | 190 | 400 |
| Rated torque [Nm] | 500 |
| Peak torque [Nm] | 1000 |
| Rated speed [rpm] | 1800 | 3800 |
| Maximum speed [rpm] | 2200 | 4000 |
| Weights [kg] | 40 |
| Efficiency [%] | 92–98% |
Table 5.
Parameters of the D1500 motor.
Table 5.
Parameters of the D1500 motor.
| Technical Indicators | Value |
|---|
| Rated voltage [V] | 800 |
| Maximum power (Cruise) [kW] | 280@1900 rpm |
| Peak power [kW] | 285@1800 rpm |
| Maximum torque(Cruise) [Nm] | 1400 |
| Peak torque [Nm] | 1500 |
| Maximum speed [rpm] | 2500 |
| Weights [kg] | ≤40 |
| Maximum Efficiency | 97% |
Table 6.
Parameters of Shandong Jingchuang motor.
Table 6.
Parameters of Shandong Jingchuang motor.
| Technical Indicators | Value (JC-V270) | Value (JC-V350) |
|---|
| Rated voltage [V] | 540/800 | 800 |
| Rated power [kW] | 64@3000 rpm | 90@2400 rpm |
| Rated torque [Nm] | 200 | 360 |
| Weights [kg] | 21.4–22.3 | 42.5–43.9 |
| Rated torque density [Nm/kg] | ≥8.97 | ≥8.2 |
Table 7.
Design parameters of superconducting motors.
Table 7.
Design parameters of superconducting motors.
| Parameters | Value |
|---|
| Rated power [MW] | 1.4 |
| Rated speed [rpm] | 6800 |
| Rated voltage [V] | 1200 |
| Rated current [A] | 360 |
| Rated torque density [Nm/kg] | ≥8.97 |
Table 8.
Effect of different cooling methods on winding current density.
Table 8.
Effect of different cooling methods on winding current density.
| Cooling Method | Maximum Current Density [A/mm2] |
|---|
| Natural convection | 1.5–5 |
| Forced radial/axial air cooling | 5–12 |
| Water-cooling of housings | 10–25 |
| Slot cooling | 12–33 |
| Spray and drip oil cooling | 15–30 |
| Hollow wire | 15–50 |
| Oil immersion cooling | 15–90 |
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}