





Smith–Watson–Topper Parameter in Partial Slip Bimodal Oscillations of Axisymmetric Elastic Contacts of Similar Materials: Influence of Load Protocol and Profile Geometry


Abstract
1. Introduction
2. Problem Statement
- the validity of a local Amontons–Coulomb friction law between normal and frictional surface tractions, with a globally constant coefficient of friction ;
- neglect of the lateral (i.e., orthogonal to the loading plane) elastic surface displacements—which would slightly violate the isotropy of the friction law.
3. Methods
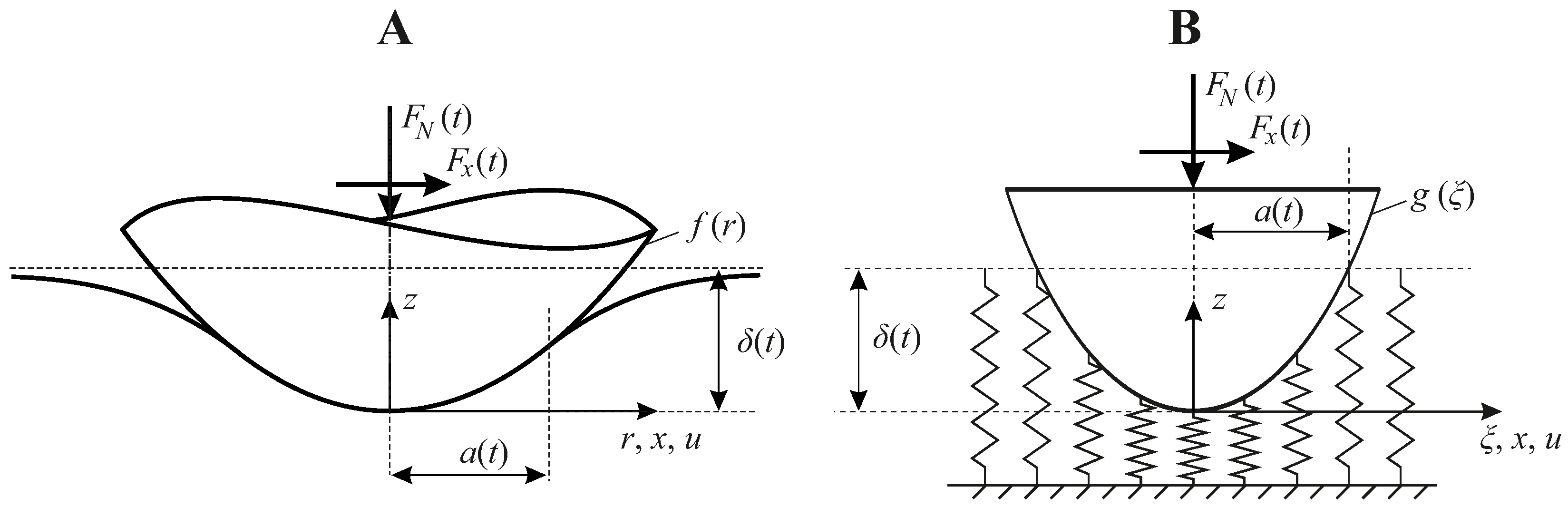
3.1. Contact Solution
3.2. Subsurface Stress Fields and SWT Parameter
4. Results
4.1. Scaling Laws
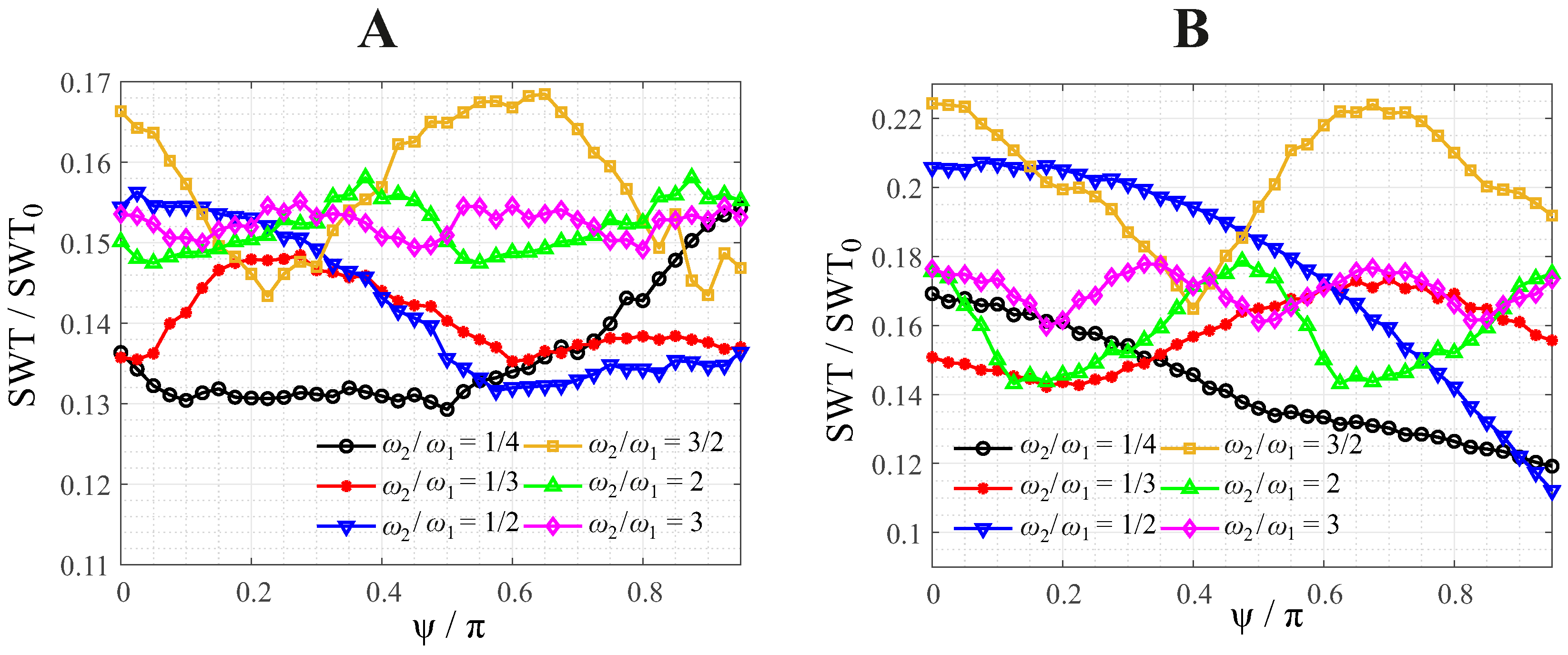
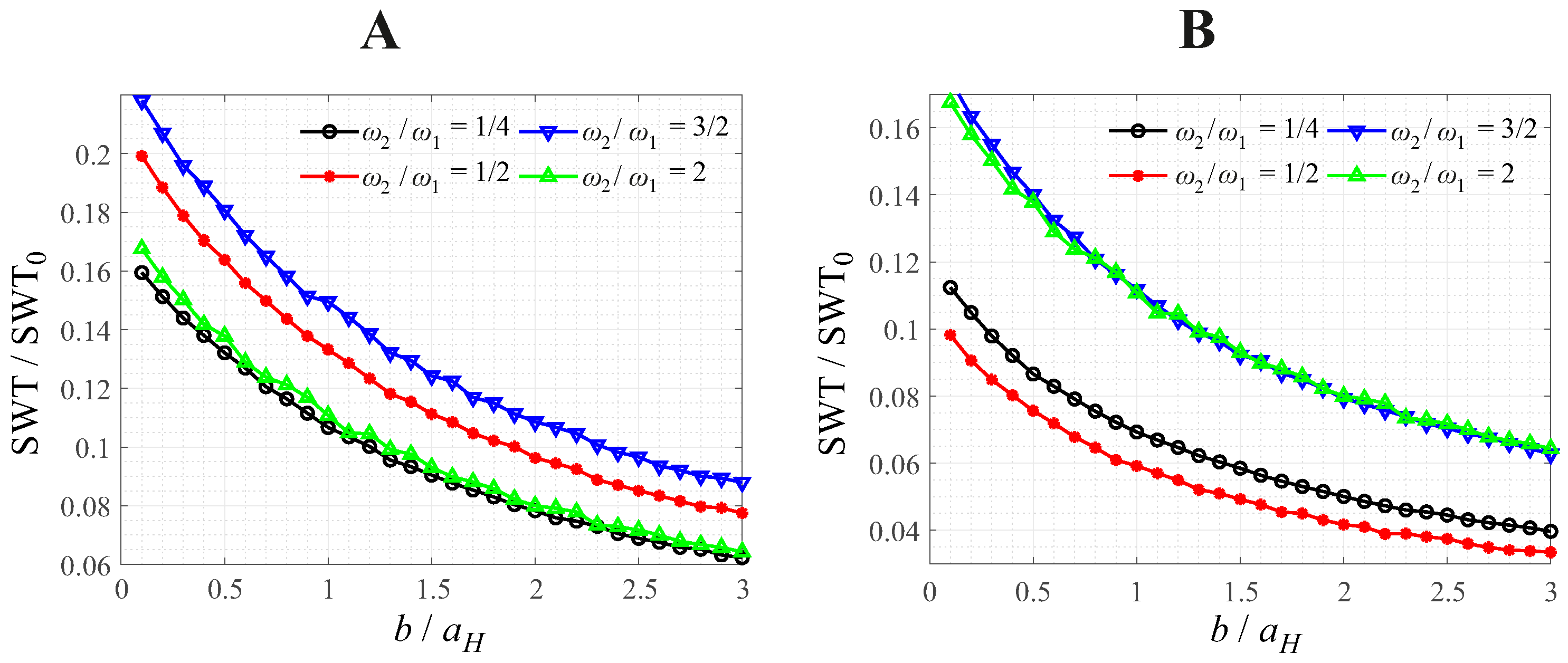
4.2. Influence of Load Parameters in Parabolic Contact
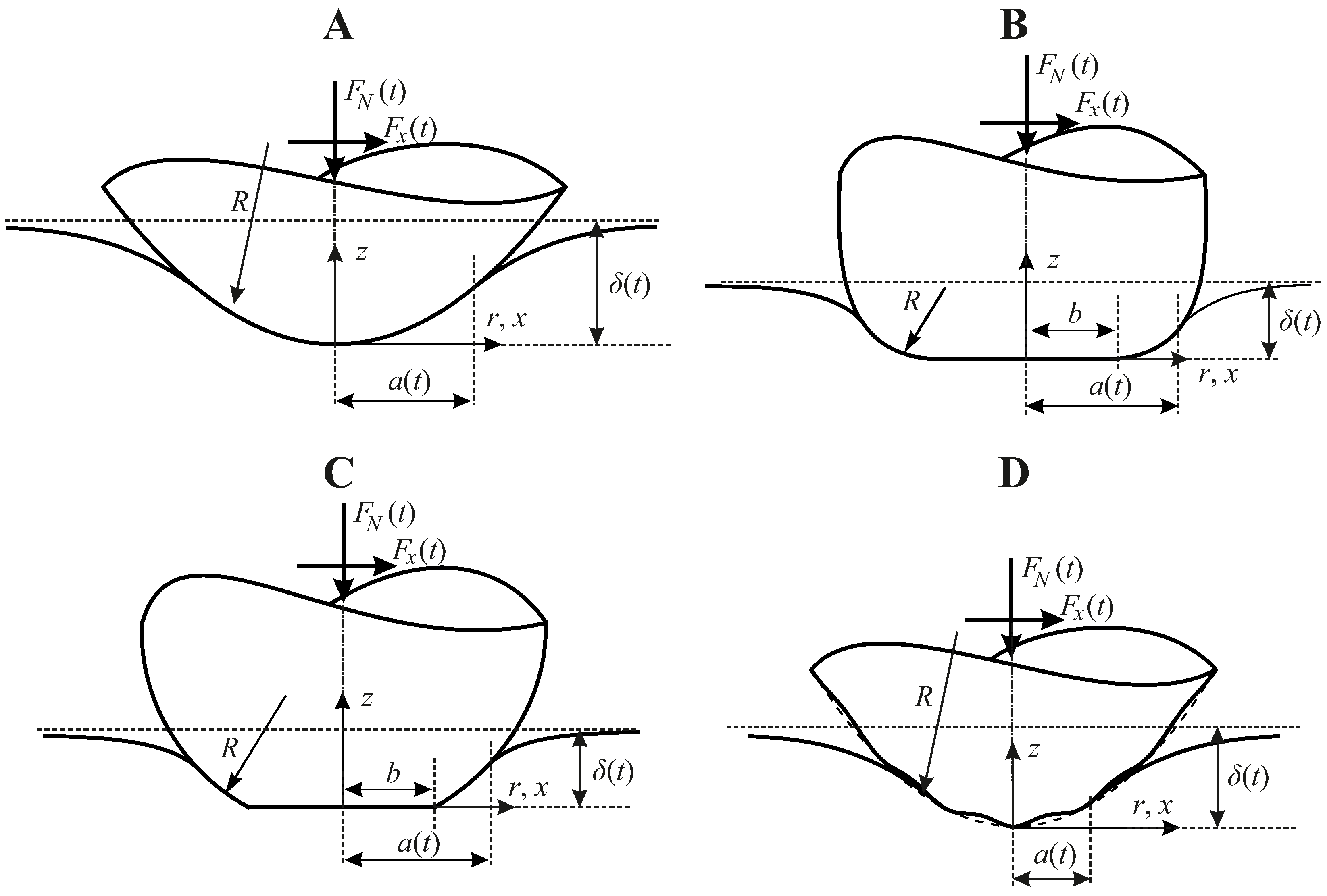
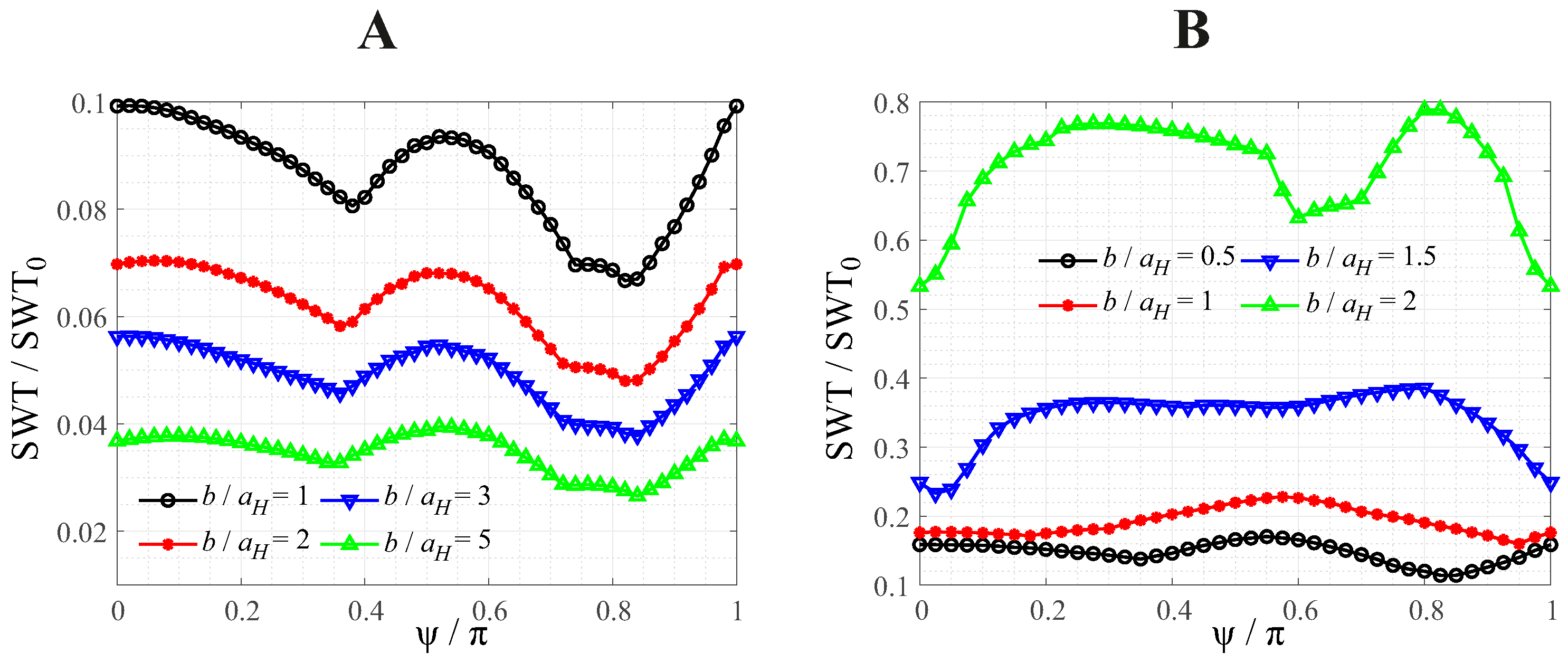
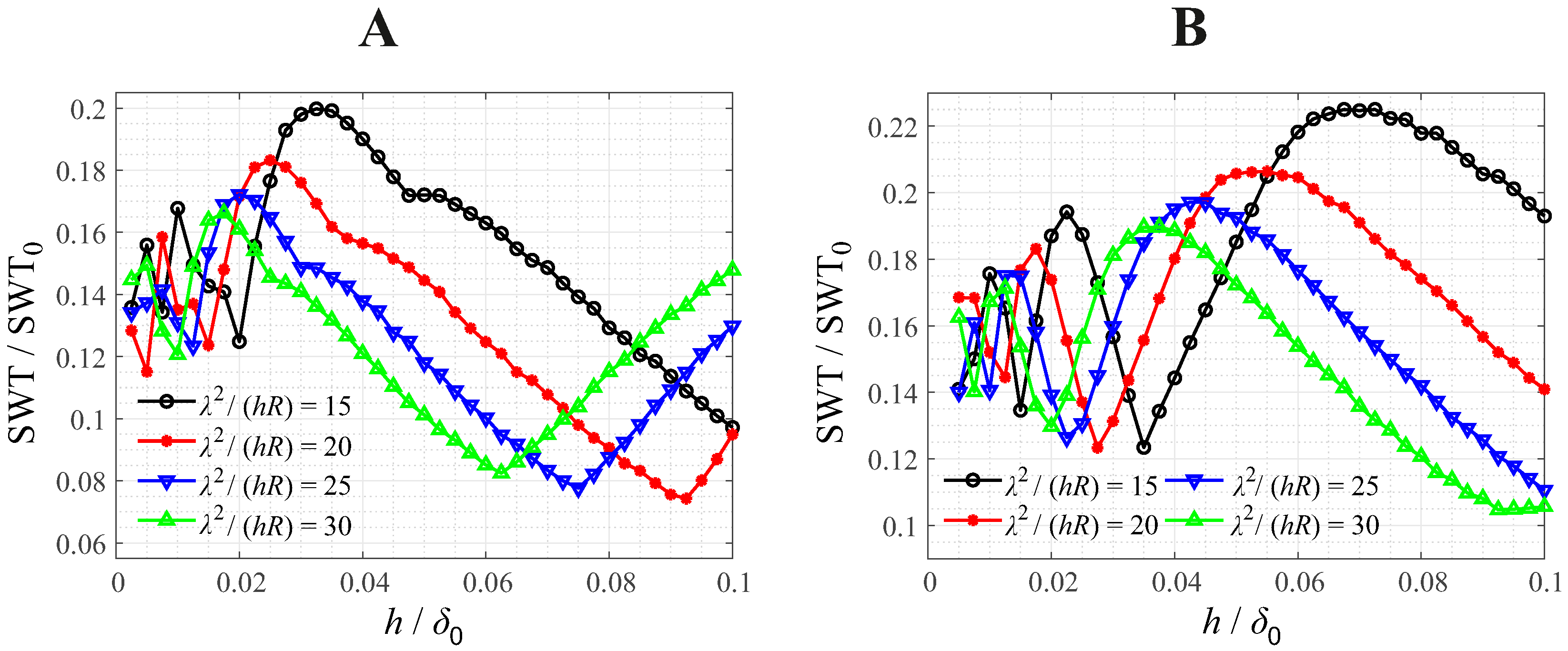
4.3. Influence of Profile Geometry
4.3.1. Rounded Flat Punch and Truncated Paraboloid
4.3.2. Paraboloid with Small Waviness
5. Summary and Discussion
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vingsbo, O.; Söderberg, S. On fretting maps. Wear 1988, 126, 131–147. [Google Scholar] [CrossRef]
- Madge, J.J.; Leen, S.B.; Shipway, P.H. The critical role of fretting wear in the analysis of fretting fatigue. Wear 2007, 263, 542–551. [Google Scholar] [CrossRef]
- Llavori, I.; Zabala, A.; Urchegui, M.A.; Tato, W.; Gómez, X. A coupled crack initiation and propagation numerical procedure for combined fretting wear and fretting fatigue lifetime assessment. Theor. Appl. Fract. Mech. 2019, 101, 294–305. [Google Scholar] [CrossRef]
- Wang, S.; Yue, T.; Wang, D.; Wahab, M.A. Effect of wear debris on fretting fatigue crack initiation. Friction 2022, 10, 927–943. [Google Scholar] [CrossRef]
- Zhu, T.; Shipway, P.H.; Sun, W. The dependence of wear rate on wear scar size in fretting; the role of debris (third body) expulsion from the contact. Wear 2019, 440–441, 203081. [Google Scholar] [CrossRef]
- Araújo, J.A.; Nowell, D.; Vivacqua, R.C. The use of multiaxial fatigue models to predict fretting fatigue life of components subjected to different contact stress fields. Fatigue Fract. Eng. Mater. Struct. 2004, 27, 967–978. [Google Scholar] [CrossRef]
- Bhatti, N.A.; Wahab, M.A. Fretting fatigue crack nucleation: A review. Tribol. Int. 2018, 121, 121–138. [Google Scholar] [CrossRef]
- Szolwinski, M.P.; Farris, T.N. Mechanics of fretting fatigue crack formation. Wear 1996, 198, 93–107. [Google Scholar] [CrossRef]
- Smith, K.N.; Watson, P.; Topper, T.H. A Stress-Strain Function for the Fatigue of Metals. J. Mater. 1970, 5, 767–778. [Google Scholar]
- Bhatti, N.A.; Wahab, M.A. A numerical investigation on critical plane orientation and initiation lifetimes in fretting fatigue under out of phase loading conditions. Tribol. Int. 2017, 115, 307–318. [Google Scholar] [CrossRef]
- Hojjati-Talemi, R.; Wahab, M.A.; De Baets, P. Finite element simulation of phase difference effects on fretting fatigue crack nucleation behaviour. Proc. Inst. Mech. Eng. Part J. Eng. Tribol. 2014, 228, 470–479. [Google Scholar] [CrossRef]
- Li, X.; Yang, J.; Tian, S.; Zhang, Y.; Liu, L.; Yang, G. The effect of phase difference and stiffness ratio on fretting fatigue behavior under variable normal load conditions. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2022, 236, 9095–9108. [Google Scholar] [CrossRef]
- Li, X.; Yang, J.; Li, M.; Zuo, Z. An investigation on fretting fatigue mechanism under complex cyclic loading conditions. Int. J. Fatigue 2016, 88, 227–235. [Google Scholar] [CrossRef]
- Blades, L.E.; Truelove, J.P.J.; Paynter, R.J.H.; Hills, D.A. Experimental investigation of the effects of load path on the life of fretting fatigue contacts. Tribol. Int. 2023, 188, 108858. [Google Scholar] [CrossRef]
- Zhang, T.; McHugh, P.E.; Leen, S.B. Computational study on the effect of contact geometry on fretting behaviour. Wear 2011, 271, 1462–1480. [Google Scholar] [CrossRef]
- Majzoobi, G.H.; Abbasi, F. On the Effect of Contact Geometry on Fretting Fatigue Life Under Cyclic Contact Loading. Tribol. Lett. 2017, 65, 125. [Google Scholar] [CrossRef]
- Willert, E. Influence of Wear Profile Geometry on Critical Plane Fatigue Crack Initiation Criteria in Plane and Axisymmetric Elastic Fretting Contacts. Front. Mech. Eng. 2022, 8, 904282. [Google Scholar] [CrossRef]
- Song, Y.; Yan, P.; Jiao, L.; Gu, H.; Guo, Z.; Zhao, B.; Wang, X. Numerical simulation of the effect of surface microgeometry and residual stress on conformal contact fretting fatigue crack initiation behaviour. Fatigue Fract. Eng. Mater. Struct. 2023, 46, 2798–2815. [Google Scholar] [CrossRef]
- Deng, Q.; Yin, X.; Wahab, M.A. The Effect of Surface Pit Treatment on Fretting Fatigue Crack Initiation. Comput. Mater. Contin. 2021, 66, 659–673. [Google Scholar]
- Gu, H.; Jiao, L.; Yan, P.; Liang, J.; Qiu, T.; Liu, Z.; Wang, X. Effect of machined surface texture on fretting crack nucleation under radial loading in conformal contact. Tribol. Int. 2021, 153, 106575. [Google Scholar] [CrossRef]
- Wang, C.; Li, Y.; Tran, N.H.; Wang, D.; Khatir, S.; Wahab, M.A. Artificial neural network combined with damage parameters to predict fretting fatigue crack initiation lifetime. Tribol. Int. 2022, 175, 107854. [Google Scholar] [CrossRef]
- Willert, E. Elastic Stress Field beneath a Sticking Circular Contact under Tangential Load. Solids 2024, 5, 14–28. [Google Scholar] [CrossRef]
- Kouanga, C.T.; Jones, J.D.; Revill, I.; Wormald, A.; Nowell, D.; Dwyer-Joyce, R.S.; Susmel, L. A variable amplitude fretting fatigue life estimation technique: Formulation and experimental validation. Tribol. Int. 2023, 178, 108055. [Google Scholar] [CrossRef]
- Pinto, A.L.; Cardoso, R.A.; Talemi, R.; Araújo, J.A. Fretting fatigue under variable amplitude loading considering partial and gross slip regimes: Numerical analysis. Tribol. Int. 2020, 146, 106199. [Google Scholar] [CrossRef]
- Cattaneo, C. Sul Contatto di due Corpore Elastici: Distribuzione degli sforzi. Rend. Dell’ Acad. Naz. Dei Lincei 1938, 27, 342–348,434–436,474–478. [Google Scholar]
- Mindlin, R.D. Compliance of Elastic Bodies in Contact. J. Appl. Mech. 1949, 16, 259–268. [Google Scholar] [CrossRef]
- Munisamy, R.L.; Hills, D.A.; Nowell, D. Static Axisymmetric Hertzian Contacts Subject to Shearing Forces. J. Appl. Mech. 1994, 61, 278–283. [Google Scholar] [CrossRef]
- Socie, D. Multiaxial Fatigue Damage Models. J. Eng. Mater. Technol. 1987, 109, 293–298. [Google Scholar] [CrossRef]
- Bhatti, N.A.; Pereira, K.; Wahab, M.A. Effect of stress gradient and quadrant averaging on fretting fatigue crack initiation angle and life. Tribol. Int. 2019, 131, 212–221. [Google Scholar] [CrossRef]
- Zabala, A.; Infante-García, D.; Giner, E.; Goel, S.; Endrino, J.L.; Llavori, I. On the use of the theory of critical distances with mesh control for fretting fatigue lifetime assessment. Tribol. Int. 2020, 142, 105985. [Google Scholar] [CrossRef]
- Pinto, A.L.; Cardoso, R.A.; Talemi, R.; Araújo, J.A. Early crack orientation prediction methods under fretting fatigue loading including wear effects. Int. J. Fatigue 2022, 161, 106893. [Google Scholar] [CrossRef]
- Jäger, J. Elastic contact of equal spheres under oblique forces. Arch. Appl. Mech. 1993, 63, 402–412. [Google Scholar] [CrossRef]
- Aleshin, V.; Bou Matar, O.; Van Den Abeele, K. Method of memory diagrams for mechanical frictional contacts subject to arbitrary 2D loading. Int. J. Solids Struct. 2015, 60–61, 84–95. [Google Scholar] [CrossRef]
- Popov, V.L.; Heß, M. Method of Dimensionality Reduction in Contact Mechanics and Friction; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Popov, V.L.; Heß, M.; Willert, E. Handbook of Contact Mechanics—Exact Solutions of Axisymmetric Contact Problems; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Willert, E. Stoßprobleme in Physik, Technik und Medizin—Grundlagen und Anwendungen; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Mossakovskij, V.I. Compression of Elastic Bodies under Conditions of Adhesion (Axisymmetric Case). PMM J. Appl. Math. Mech. 1963, 27, 630–643. [Google Scholar] [CrossRef]
- Jäger, J. Axi-symmetric bodies of equal material under torsion or shift. Arch. Appl. Mech. 1995, 65, 478–487. [Google Scholar] [CrossRef]
- Gandiolle, C.; Fouvry, S.; Charkaluk, E. Lifetime prediction methodology for variable fretting fatigue loading: Plasticity effect. Int. J. Fatigue 2016, 92, 531–547. [Google Scholar] [CrossRef]
- Hintikka, J.; Mäntylä, A.; Vaara, J.; Frondelius, T.; Lehtovaara, A. Stable and unstable friction in fretting contacts. Tribol. Int. 2019, 131, 73–82. [Google Scholar] [CrossRef]
- Kobelev, V. Effects of Mean Stress and Multiaxial Loading on the Fatigue Life of Springs. Eng 2023, 4, 1684–1697. [Google Scholar] [CrossRef]
- Truelove, J.P.J.; Blades, L.E.; Hills, D.A.; Paynter, R.J.H. Frictional half plane contacts subject to varying normal load and bulk tension under various load paths with application to fretting fatigue experiments. Tribol. Int. 2023, 185, 108563. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ||||||
| Value | 0.3 | 0.3 | 3/4 | 1 | 5/6 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Willert, E. Smith–Watson–Topper Parameter in Partial Slip Bimodal Oscillations of Axisymmetric Elastic Contacts of Similar Materials: Influence of Load Protocol and Profile Geometry. Eng 2024, 5, 333-346. https://doi.org/10.3390/eng5010018
Willert E. Smith–Watson–Topper Parameter in Partial Slip Bimodal Oscillations of Axisymmetric Elastic Contacts of Similar Materials: Influence of Load Protocol and Profile Geometry. Eng. 2024; 5(1):333-346. https://doi.org/10.3390/eng5010018
Chicago/Turabian StyleWillert, Emanuel. 2024. "Smith–Watson–Topper Parameter in Partial Slip Bimodal Oscillations of Axisymmetric Elastic Contacts of Similar Materials: Influence of Load Protocol and Profile Geometry" Eng 5, no. 1: 333-346. https://doi.org/10.3390/eng5010018
APA StyleWillert, E. (2024). Smith–Watson–Topper Parameter in Partial Slip Bimodal Oscillations of Axisymmetric Elastic Contacts of Similar Materials: Influence of Load Protocol and Profile Geometry. Eng, 5(1), 333-346. https://doi.org/10.3390/eng5010018