
Multi-Point Shape Optimization of a Horizontal Axis Tidal Stream Turbine



Abstract
:1. Introduction
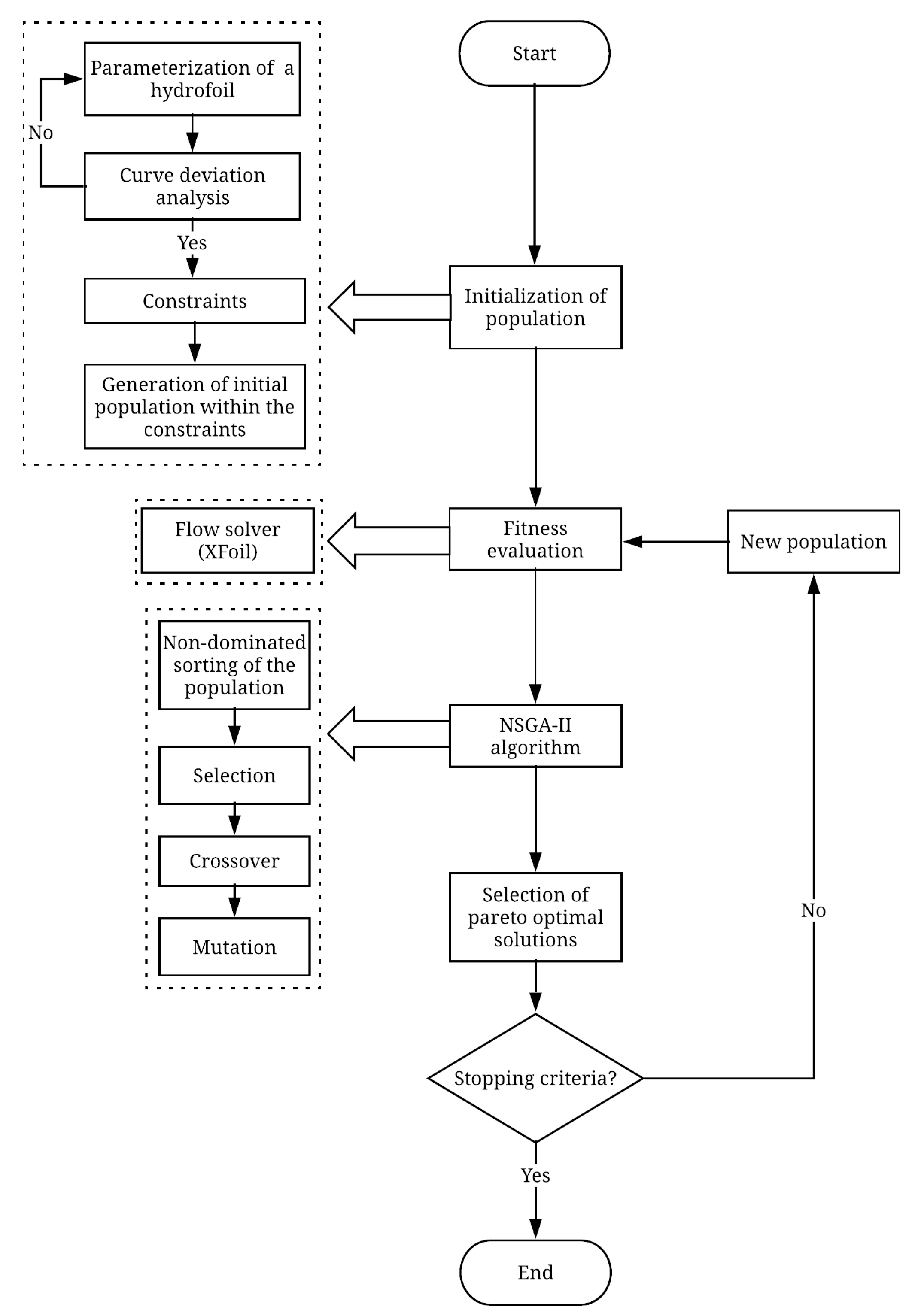
2. Optimization Methodology
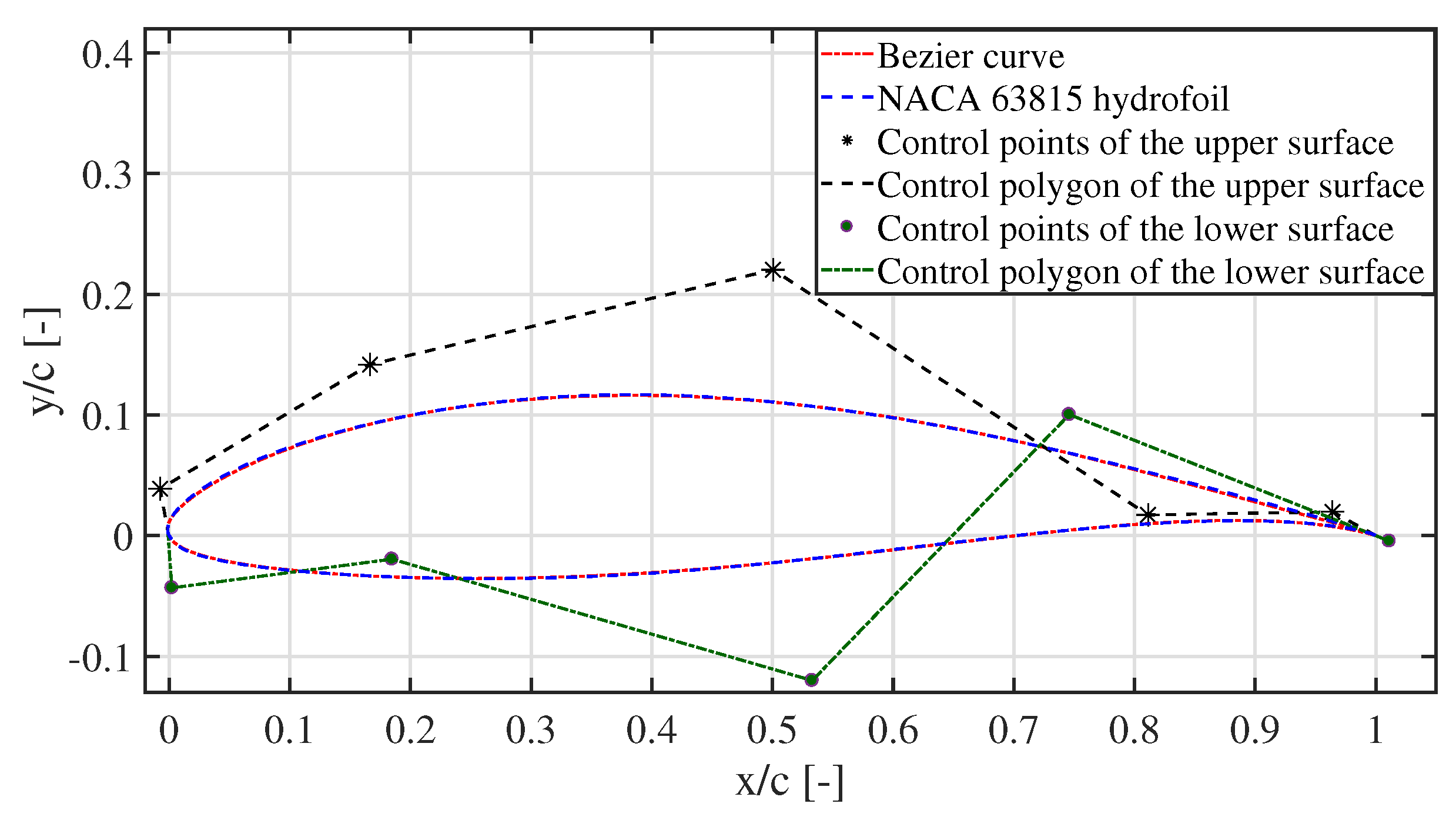
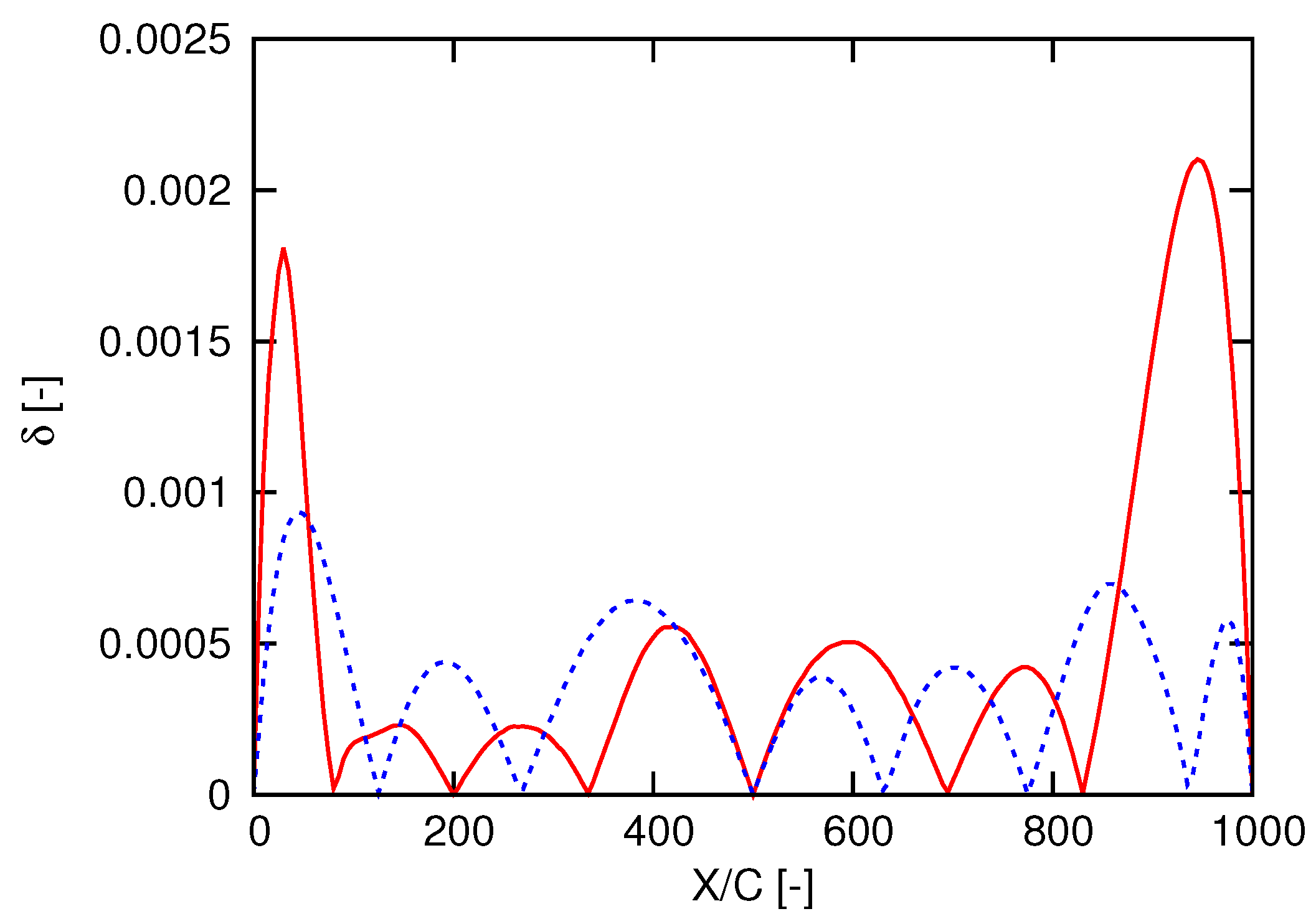
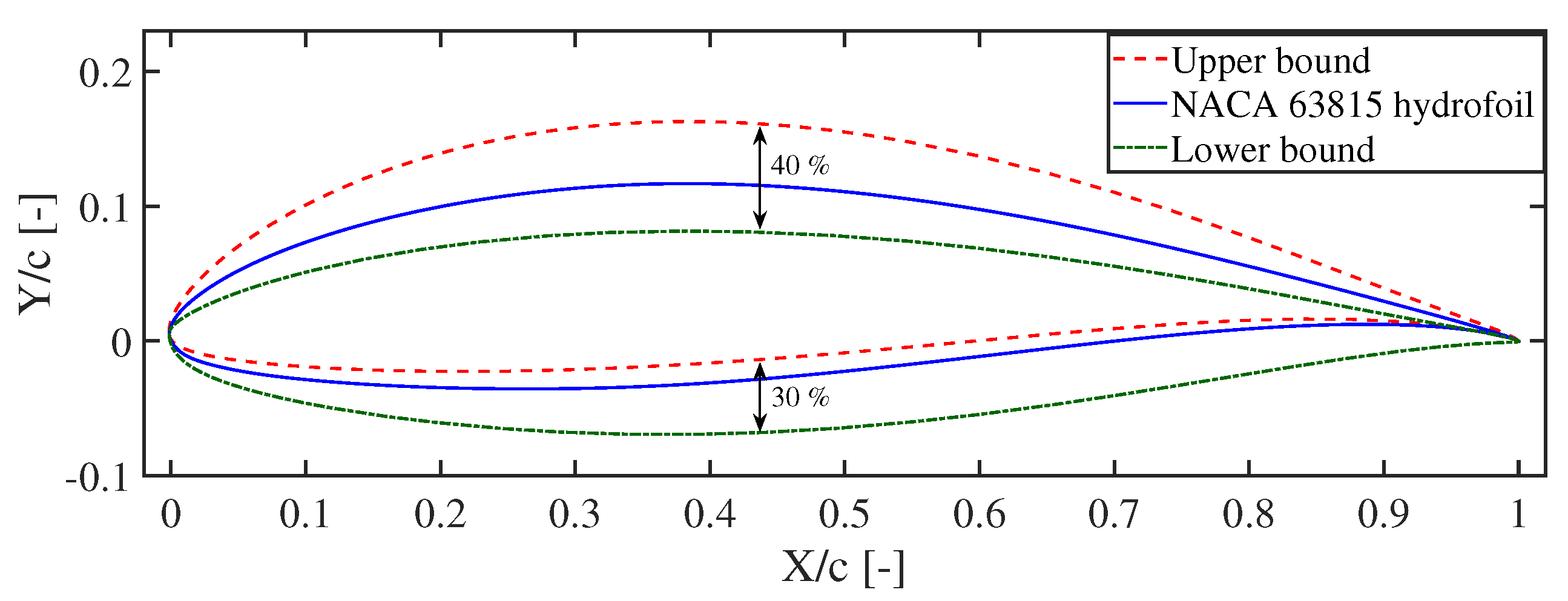
2.1. Initialization of Population
2.2. The Flow Solver
2.3. Optimization Algorithm
2.4. Selection of Pareto Optimal Solutions
2.5. The Stopping Criterion
3. Hydrofoil Shape Optimization Strategies
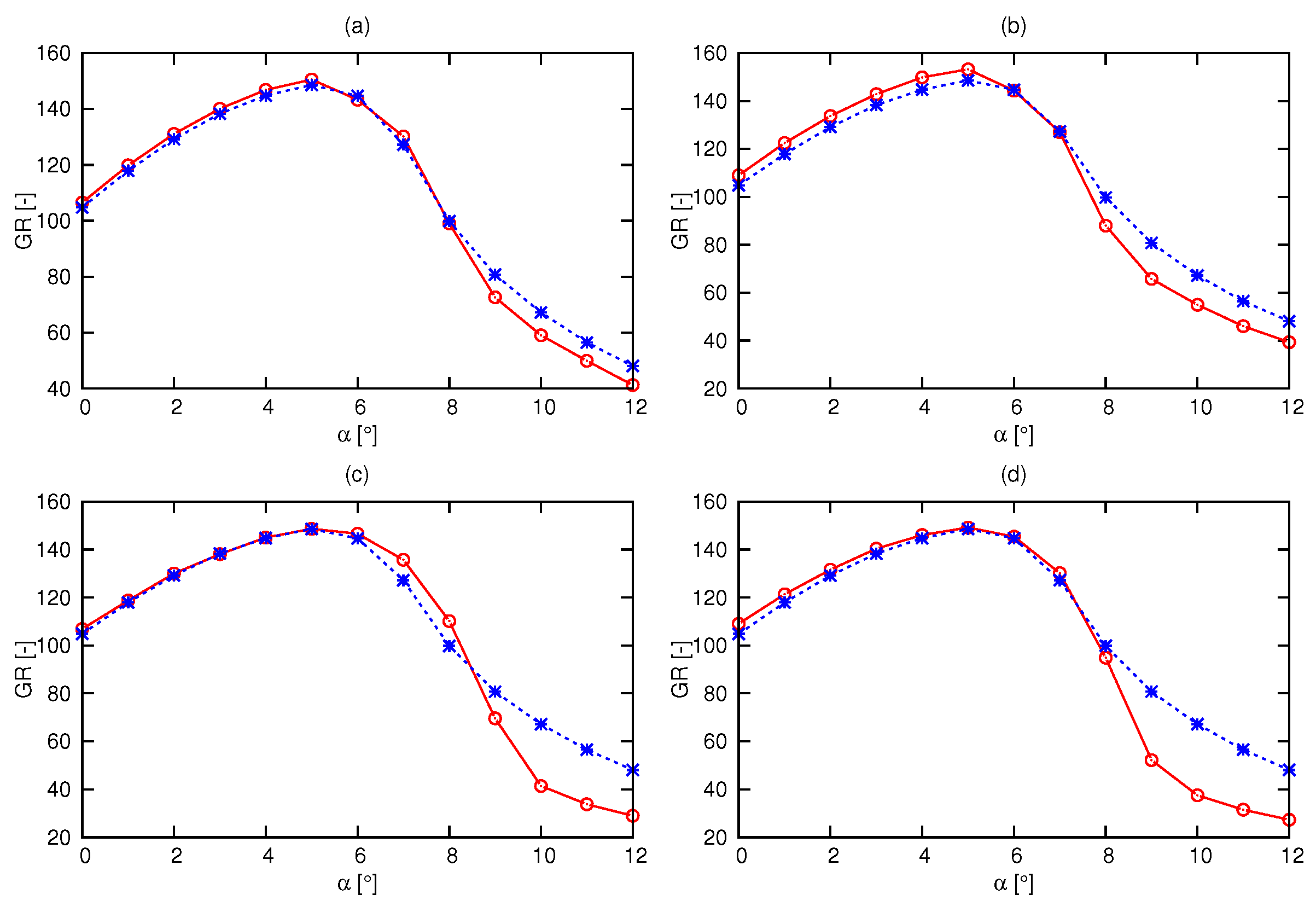
3.1. Three Dimensional (3-D) Optimization
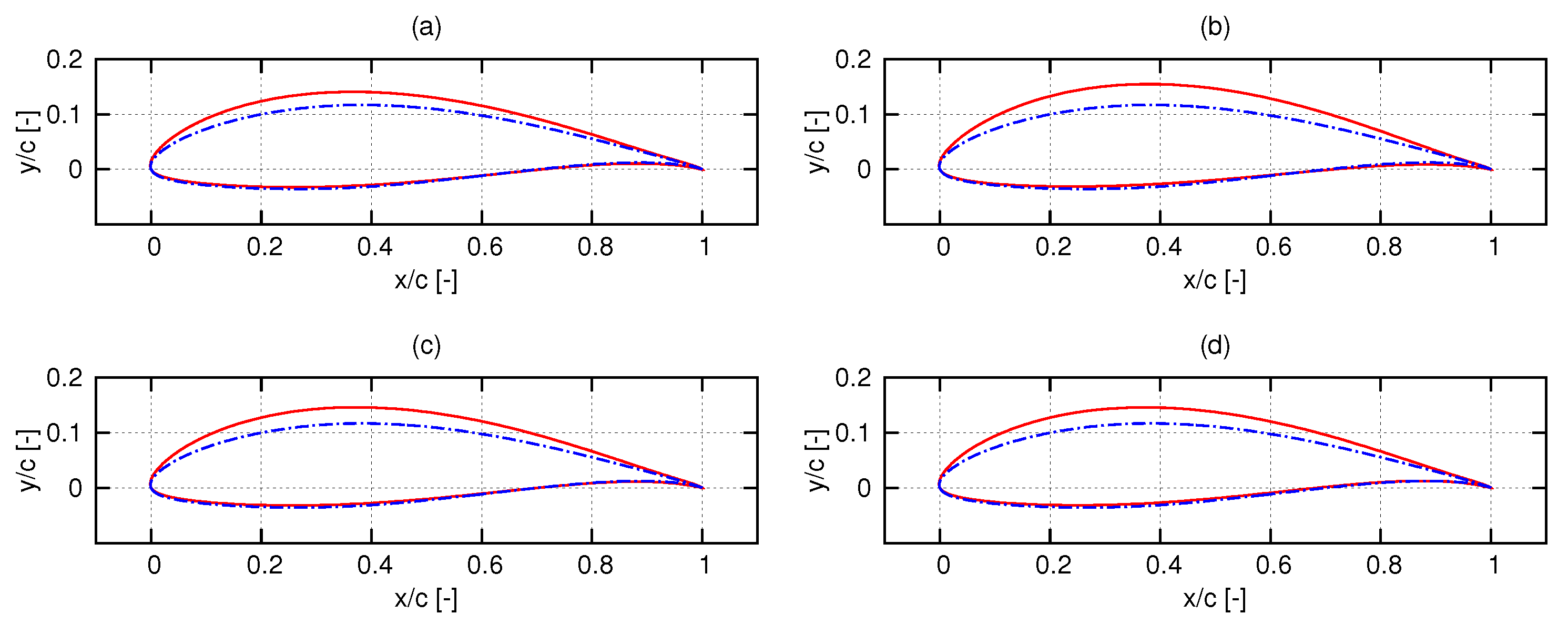
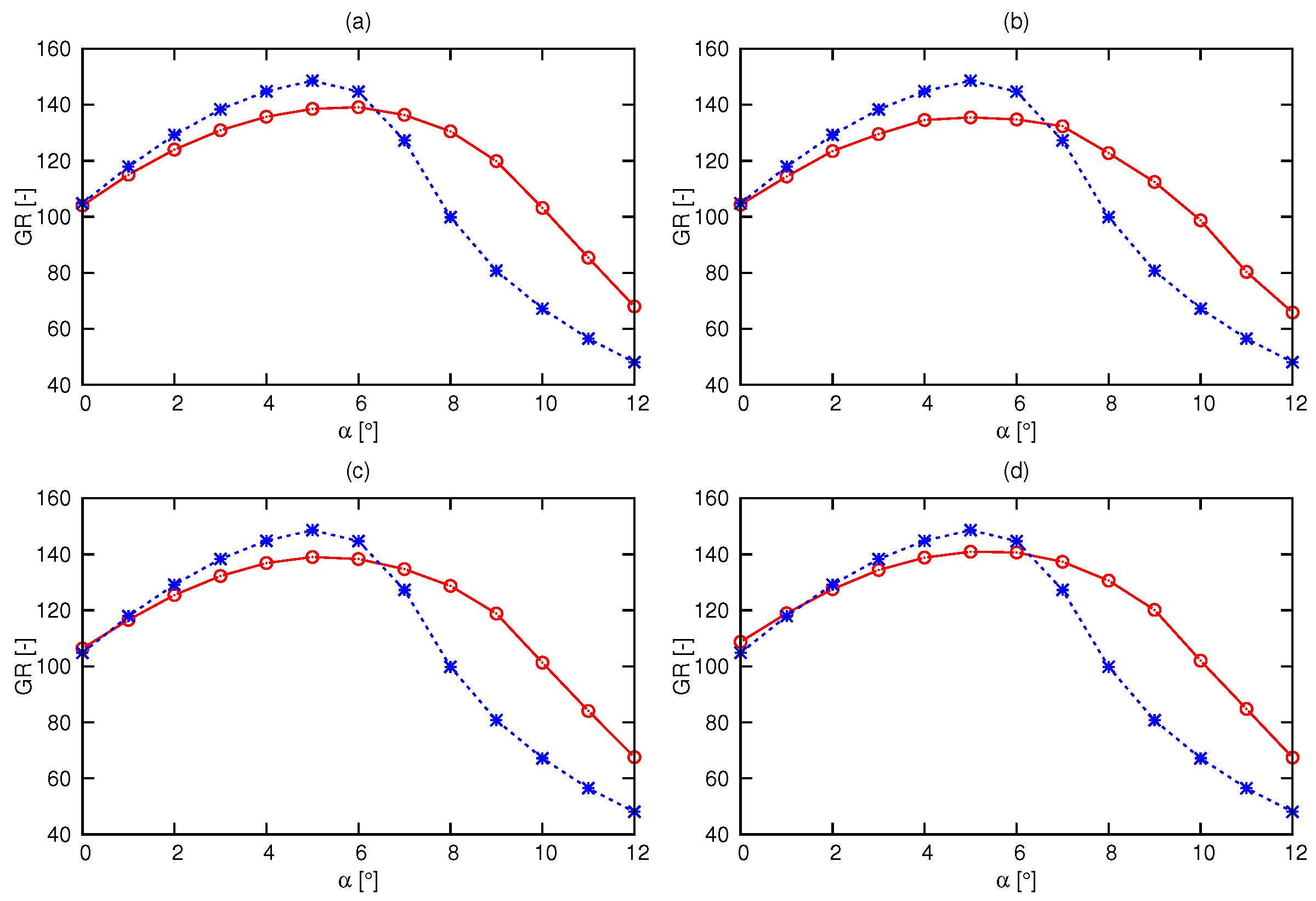
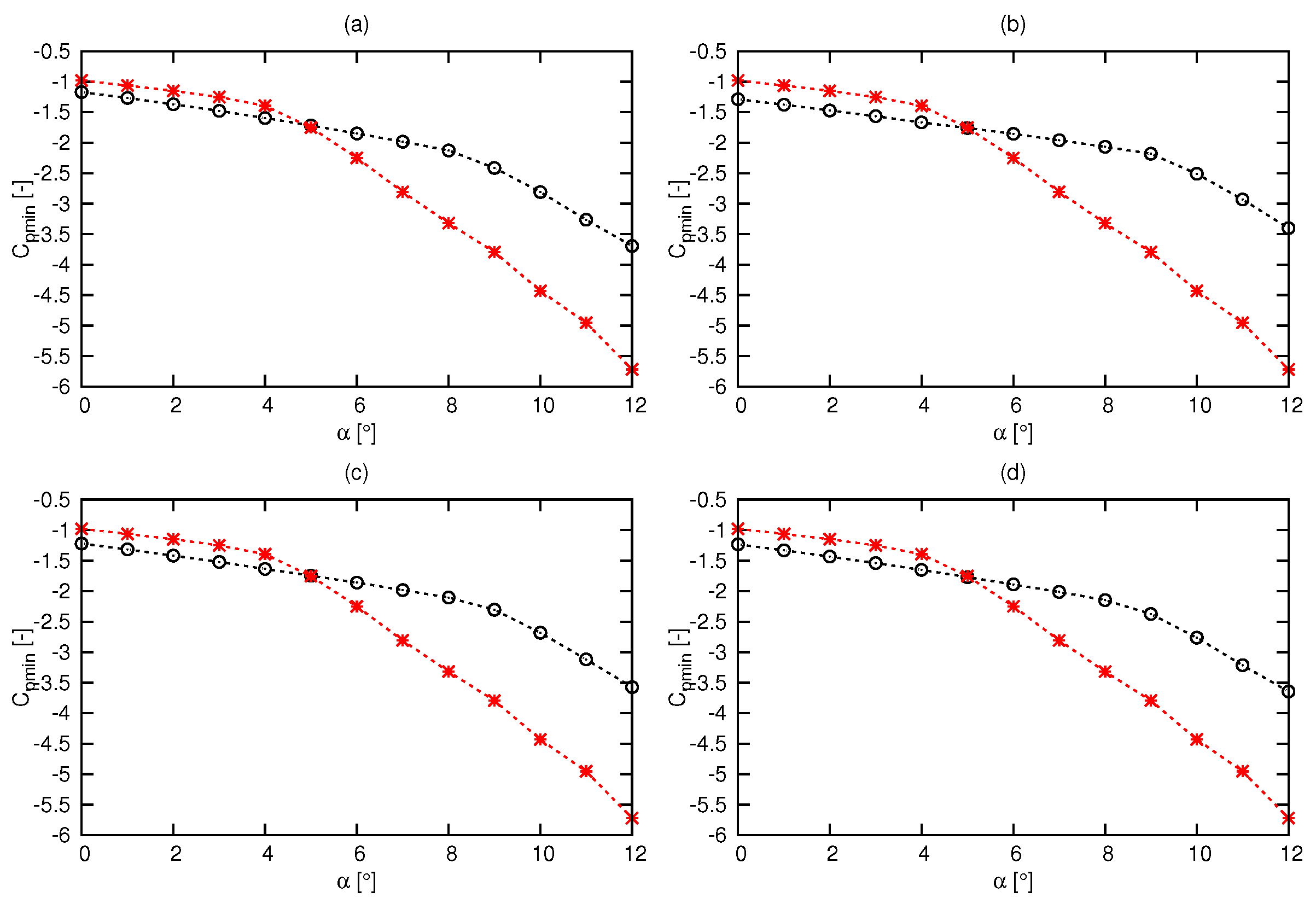
3.2. Two-Dimensional (2-D) Optimization
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nemec, M.; Zingg, D.W.; Pulliam, T.H. Multipoint and multi-objective aerodynamic shape optimization. AIAA J. 2004, 6, 1057–1065. [Google Scholar] [CrossRef]
- Peigin, S.; Epstein, B. Robust optimization of 2d airfoils driven by full Navier–Stokes computations. Comput. Fluids 2004, 9, 1175–1200. [Google Scholar] [CrossRef]
- Shahrokhi, A.; Jahangirian, A. Airfoil shape parameterization for optimum Navier–Stokes design with genetic algorithm. Aerosp. Sci. Technol. 2007, 6, 443–450. [Google Scholar] [CrossRef]
- Mukesh, R.; Lingadurai, K.; Selvakumar, U. Airfoil shape optimization using non-traditional optimization technique and its validation. J. King Saud Univ.-Eng. Sci. 2014, 2, 191–197. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, A.; Awruch, A.M.; Gomes, H.M. An airfoil optimization technique for wind turbines. Appl. Math. Model. 2012, 10, 4898–4907. [Google Scholar] [CrossRef]
- Luo, X.-Q.; Zhu, G.-J.; Feng, J.-J. Multi-point design optimization of hydrofoil for marine current turbine. J. Hydrodyn. Ser. B 2014, 5, 807–817. [Google Scholar] [CrossRef]
- Liu, P.; Veitch, B. Design and optimization for strength and integrity of tidal turbine rotor blades. Energy 2012, 1, 393–404. [Google Scholar] [CrossRef]
- Goundar, J.N.; Ahmed, M.R. Design of a horizontal axis tidal current turbine. Appl. Energy 2013, 111, 161–174. [Google Scholar] [CrossRef]
- Papadrakakis, M.; Papadopoulos, V.; Stefanou, G.; Plevris, V.A. Framework for the design by optimization of hydrofoils under cavitating conditions. In Proceedings of the 7th European Congress on Computational Methods in Applied Sciences and Engineering, ECCOMAS 2016, Crete, Greece, 5–10 June 2016. [Google Scholar]
- De Boor, C.; Mathematicien, E.-U.; De Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978; Volume 27. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 2, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Clerc, M. Particle Swarm Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. Int. Conf. Neural Netw. 1995, 5, 1942–1948. [Google Scholar]
- Hsin, C.-Y.; Wu, J.-L.; Chang, S.-F. Design and optimization method for a two-dimensional hydrofoil. J. Hydrodyn. 2006, 5, 323–329. [Google Scholar] [CrossRef]
- Ouyang, H.; Weber, L.J.; Odgaard, A.J. Design optimization of a two-dimensional hydrofoil by applying a genetic algorithm. Eng. Optim. 2014, 5, 529–540. [Google Scholar] [CrossRef]
- Zhang, D.-S.; Chen, J.; Shi, W.-D.; Shi, L.; Geng, L.-L. Optimization of hydrofoil for tidal current turbine based on particle swarm optimization and computational fluid dynamic method. Therm. Sci. 2016, 3, 907–912. [Google Scholar] [CrossRef]
- Litvinov, W. On the optimal shape of a hydrofoil. J. Optim. Theory Appl. 1995, 2, 325–345. [Google Scholar] [CrossRef]
- Goundar, J.N.; Ahmed, M.R.; Lee, Y.-H. Numerical and experimental studies on hydrofoils for marine current turbines. Renew. Energy 2012, 42, 173–179. [Google Scholar] [CrossRef]
- Tahani, M.; Babayan, N. Optimum section selection procedure for horizontal axis tidal stream turbines. Neural Comput. Appl. 2017, 31, 1211–1223. [Google Scholar] [CrossRef]
- Konak, A.; Coit, D.W.; Smith, A.E. Multi-objective optimization using genetic algorithms: A tutorial. Reliab. Eng. Syst. Saf. 2006, 91, 992–1007. [Google Scholar] [CrossRef]
- Baskar, S.; Tamilselvi, S.; Varshini, P. MATLAB Code for Constrained NSGA II. Available online: https://de.mathworks.com/matlabcentral/fileexchange/49806-matlab-code-for-constrained-nsga-ii-dr-s-baskar–s-tamilselvi-and-//mdx.plm.automation.siemens.com/star-ccm-plus/ (accessed on 12 October 2017).
- Abbott, I.H.; von Doenhoff, A.E. Theory of Wing Sections, Including a Summary of Airfoil Data; Courier Corporation: Mineola, NY, USA, 1959. [Google Scholar]
- Batten, W.; Bahaj, A.; Moll, A.; Chaplin, J. Hydrodynamics of marine current turbines. Renew. Energy 2006, 31, 249–256. [Google Scholar] [CrossRef] [Green Version]
- Drela, M. Xfoil: An Analysis and Design System for Low Reynolds Number Airfoils; Springer: Berlin/Heidelberg, Germany, 1989; Volume 111, pp. 1–12. [Google Scholar]
- Moll, A.F.; Bahaj, A.S.; Chaplin, J.R.; Batten, W.M.J. Measurements and predictions of forces, pressures and cavitation on 2-D sections suitable for marine current turbines. Proc. Inst. Mech. Eng. Part M 2004, 2, 127–138. [Google Scholar]
- Menter, F. Zonal two equation kw turbulence models for aerodynamic flows. In Proceedings of the 23rd Fluid Dynamics, Plasma Dynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar]
- Patankar, S.V. Computational Methods for Fluid Dynamics; Taylor& Francis: Germantown, NY, USA, 2016. [Google Scholar]
- Batten, W.M.J.; Bahaj, A.S.; Moll, A.F.; Chaplin, J.R. Experimentally validated numerical method for the hydrodynamic design of horizontal axis tidal turbines. Ocean. Eng. 2007, 7, 1013–1020. [Google Scholar] [CrossRef]
- Goldberg, D. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley Publishing Company: Boston, MA, USA, 1989. [Google Scholar]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generation | Mean | Mean | Mean | Number of Optimized Hydrofoils |
|---|---|---|---|---|
| 1 | 1.1337 | 0.014 | −2.3882 | 11 |
| 5 | 1.1664 | 0.012 | −2.115 | 18 |
| 10 | 1.1866 | 0.0123 | −2.0462 | 24 |
| 15 | 1.1789 | 0.0122 | −2.0458 | 22 |
| 20 | 1.1721 | 0.012 | −2.0645 | 18 |
| 25 | 1.1656 | 0.012 | −2.0568 | 20 |
| 30 | 1.1713 | 0.0119 | −2.0899 | 20 |
| Generation | Mean Glide Ratio | Mean | Number of Optimized Hydrofoils |
|---|---|---|---|
| 1 | 94.4015 | −2.1861 | 21 |
| 5 | 98.1213 | −1.9701 | 34 |
| 10 | 96.5394 | −1.9297 | 27 |
| 15 | 97.9764 | −1.9464 | 33 |
| 20 | 97.6847 | −1.9418 | 33 |
| 25 | 96.7179 | −1.937 | 30 |
| 30 | 96.5764 | −1.9312 | 30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
el Sheshtawy, H.; el Moctar, O.; Natarajan, S. Multi-Point Shape Optimization of a Horizontal Axis Tidal Stream Turbine. Eng 2021, 2, 340-355. https://doi.org/10.3390/eng2030022
el Sheshtawy H, el Moctar O, Natarajan S. Multi-Point Shape Optimization of a Horizontal Axis Tidal Stream Turbine. Eng. 2021; 2(3):340-355. https://doi.org/10.3390/eng2030022
Chicago/Turabian Styleel Sheshtawy, Hassan, Ould el Moctar, and Satish Natarajan. 2021. "Multi-Point Shape Optimization of a Horizontal Axis Tidal Stream Turbine" Eng 2, no. 3: 340-355. https://doi.org/10.3390/eng2030022
APA Styleel Sheshtawy, H., el Moctar, O., & Natarajan, S. (2021). Multi-Point Shape Optimization of a Horizontal Axis Tidal Stream Turbine. Eng, 2(3), 340-355. https://doi.org/10.3390/eng2030022