1. Introduction
The paper presents a computerized stand for the preparation of a mixture of flammable/toxic/explosive gases, with the purpose of obtaining gas mixtures at concentrations in the explosive range [
1] between the lower explosive limit (known as LEL) and the upper explosive limit (known as UEL) and with a 0.1% volume of accuracy.
In physical experiments carried out in the laboratory activity, it is necessary to use a system that reduces the concentration of known gases. The produced gas mixtures must be in the explosive range between the lower explosive limit [
2] (LEL) and the upper explosive limit (UEL) and with a 0.1% volume of accuracy [
3]. The operation principle of the system is based on the mixing of two volumetric flows, controlled by a programmable microcontroller, in which the gases are stored and conveyed at atmospheric pressure with the help of cylindrical injectors with a storage capacity of 10 cubic decimeters. These injectors are operated with stepper motors so that the gas circuit does not require valves of any kind and at the outlet there is a homogenization chamber, equipped with an agitator and sensor dedicated to flammable/explosive gas [
4] to confirm the programmed concentration.
As a short description, gas mixing and blending systems perform automatic gas mixing in order to generate accurate gas calibration standards, to create gaseous atmospheres [
5,
6] or to produce gas mixtures for research or analytical production purposes.
2. Materials and Methods
In the present state, most methods of obtaining gas mixtures are known and used such as: gas mixers with mechanical valves [
7,
8] or with electrical valves, ones with the help of mass flow regulators and by indirect reading of the gas concentration desired by measuring the oxygen concentration and by applying the law of partial pressures (i.e., Dalton’s Law).
2.1. Mechanical Method
In the case of the mechanical method used for gas mixing, a mechanical valve is used for the mixing operation. These mechanical valves are available in two versions: dosing valves or proportional valves. The best versions for a gas mixture are proportional valves, which have two gas inlets and a mixture outlet. Inside these valves, we find a combination of a piston and holes. When the valve is rotated, the flow rate of one gas is increased by the piston and the flow rate of the other gas is reduced proportionally. When it is necessary to mix three or more gases, simple dosing valves are used, with one valve used for each gas. Depending on the rotation of the valve, the piston inside opens or close the aperture and allows a greater or lesser gas flow. By adjusting these individual valves, the desired gas mixture is obtained.
2.2. Electric Valves
For the gas mixing method that uses electric mixing valves, the mixing components are basically the same as the mechanical mixing valves. For two gas mixtures, a proportional valve is used, which simultaneously changes the flow rates of the two gases. Unlike mechanical valves, the position of the valve is not manually changed, but rather is changed with the help of electric motors.
A more popular version used in recent years in gas mixing uses mass flow regulators, also known as MFCs (mass flow controllers). An MFC gas mixer regulates the mass flow of each gas. With the help of thermal conductivity, the volume flow is detected and regulated. The total streams of individual gases realize the desired final gas mixture [
3]. Selecting the right gas mixer depends on the application for which it will be used, as well as related requirements.
2.3. Indirect Reading Method
For dynamic mixers based on the indirect reading of the desired gas concentration, by measuring the oxygen concentration, based on the principle of displacement of a known volume and determined by the molar mass of the gas, there is a calculus of equivalent proportions, all related to permanent sampling [
9] at the exit of the mixer. Stands that realize gas mixtures by applying the law of partial pressures (Dalton’s Law) require a strong chamber equipped with a manometer and a vacuum pump that empties the mixing gas chamber; then, through circuits with valves, the gases required for the mixture are introduced, and preliminary calculations are carried out for the partial pressures, depending on the molar mass specific to each component. Some disadvantages of these mixing methods are: the gas circuits require valves, solenoid valves, or pneumatic valves, which can affect the desired concentration of the mixture. The operation involves working with pressures/depressions other than atmospheric pressure, operations that lead to the use of containers and circuits with high mechanical strength, suitable for high pressures/depressions, increasing the risk of “Back Flow” return. Finally, the use of an oxygen sensor in the pressure variations can cause the mixer to fail, in the case of a mixer based on the principle of oxygen displacement by the gas of interest.
2.4. The Objective of This Programmable Mixer
The programmable mixer described in this paper eliminates the disadvantages of the known stands and methods. Methods at the national and international level to obtain gas mixtures are currently conducted with mechanical valves, with electric valves, with the help of flow regulators, or by indirect reading the concentration of the gas of interest through measuring the concentration of oxygen, as well as by applying the law of partial pressures. This allows for the obtaining of homogeneous mixtures at high precision concentrations, the elimination of mechanical, electrical, or pneumatic valves from the gas circuit, which are susceptible to the negative influence of the mixture concentration, avoidance of elements that are suitable for high pressures/depressions and eliminating the possibility of gas flow return, without the sensitivity to sudden pressure variations.
Another advantage of the stand is that the programming of concentrations can be done in a range of values from 0.1% volume to 99.9% volume with a ±0.1% volume accuracy. Some enhancements include the making of a homogeneous mixture [
10,
11] with the help of the stirrer in the mixing chamber and a visual display of the programmed concentration at the exit of the homogenization chamber.
2.5. The Use of Stepper Motors
These stepper motors are DC-based motors that rotate in precise increments. They are very useful when you need to position something very accurately. These stepper motors are controlled by applying pulses of direct current electricity inside their internal coils. These pulses provide rotation of the motor by one step, also known as micro stepping. Step-by-step motors have a magnetized geared core surrounded by a defined number of coils that acts as electromagnets. Usually only two coils are inside a step-by-step motor divided further into a small number of coils. To move the stepper motor shaft in a discrete number of steps, we need to precisely control the current inside the coils, applying electricity in polarity to energize one coil, then the motor shaft is attracted to the energized coil and locks into place. Removing the electricity from one coil and applying it to the other coil of the stepper motor causes the shaft to move to the second energized coil and lock into place.
Applying current to both coils in equal amounts causes the motor shaft to lock into place halfway from the two coils, also known as a half step. This operating mode can be extended to create fourth steps, eighth steps, and even sixteenth steps. We can obtain this operating principle by controlling the ratio of the current that is applied to both coils, which will cause the motor shaft to move to a position between the coils a position that is closer to one coil than the other. Precise positioning is obtained by using micro stepping, which will move the motor shaft a fraction of a degree.
Bipolar stepper motors consist of two coils of wire, generally, they have four connections, two connections per coil. One big advantage of bipolar stepper motors is that they use the entire coil winding to be more efficient. In this case, bipolar stepper motors need a complex controller or a driver to operate.
Unipolar stepper motors also have two electrical coils, but each of the coils have a centered tap, resulting in three connections on each coil.
In a unipolar type stepper motor, only half of each coil is used at one time. In every configuration, the positive voltage is applied to the center tap and left there.
In order to attract the motor shaft, a negative voltage is applied to one side of the coil, just like the case of bipolar stepper motor; unipolar stepper motors can advance one step when current is removed from the center tap of the coil and is applied to the next side of the coil. If we want to reverse the direction of a unipolar stepper motor, we do not need to reverse the polarity; it can be done by simply applying a negative voltage to the other side of the coil. In this case, current will flow exactly in the opposite direction through the coil and will cause the stepper motor shaft to move in the opposite direction.
Unipolar stepper motors are a lot easier to control because they do not require reversing current polarity to change direction. In this case, the unipolar stepper motor uses only half of the coil windings; thus, at a certain moment, unipolar motors become less efficient due to wasting half of the coil wiring. There are also stepper motors that can be wired as bipolar motors and unipolar motors. They are made of four coils that can be joined together to create two center tap coils (in the case of unipolar configuration) or two coils (in the case of bipolar configuration).
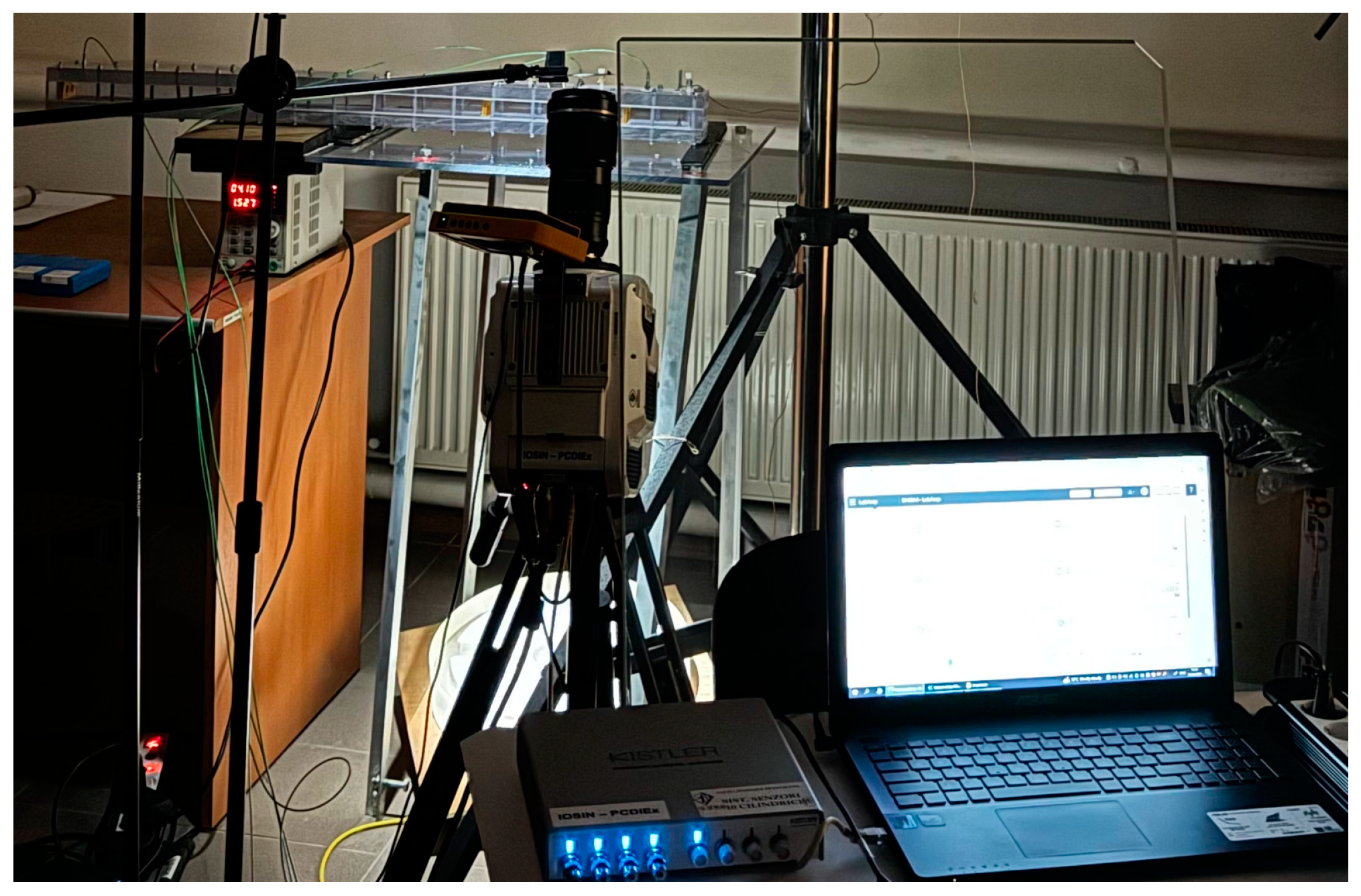
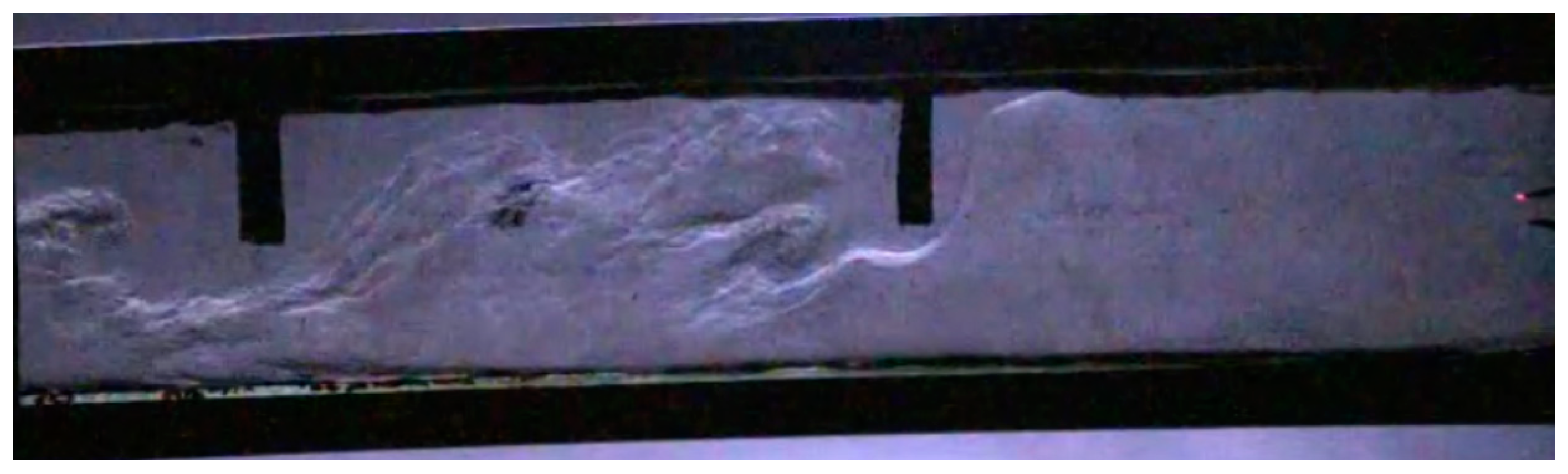
2.6. Capturing the Flame Front with Schlieren Technique
Shadowgraph and Schlieren techniques are used in aeronautical engineering to see the flow around high-speed aircraft and missiles, as well as in combustion research, ballistics, explosions and in the testing of glass. In principle, they are ideal for the identification of flow patterns. Schlieren photography is a visual process used to photograph the flow of fluids of varying density. As mentioned, the Schlieren process was invented to study supersonic motion, widely used in aeronautical engineering, to observe and record the flow of air around objects. The role of this method is changing due to the increasing use of computational fluid dynamics, which reduces the need for all such experimental fluid flow measurement techniques. A basic Schlieren system uses light from a single collimated source shining on, or from behind, a target object.
2.7. Arduino Used as Open Source Platform to Program the Mixer
To program and control the stepper motors, an open-source board was used. This developing board allows users to develop electronic projects. It consists of a physical programmable circuit board (referred to as a microcontroller) and software, or an integrated development environment [
12] (also known as IDE) that runs on a computer, and it is used to write and upload computer code to the board.
Arduino was the best decision here, in order to make the gas mixer programmable. This board is an open hardware that can be used in many applications and comes with various benefits for the user, such as: 14 digital input/output pins/analog pins arranged in a specific pattern, in order to fit into most Arduino compatible devices; power connect for the device itself and low voltage for connected components; and a microcontroller allowing programming of the board, in general Atmel controllers, like ATmega8, ATmega168 and the one used for the mixer, ATmega328, on Arduino Uno. Serial connector and a variety of other small components (oscillator, voltage regulators).
Regarding previous programmable circuit boards, the ones used here do not need separate hardware (that is called a programmer) to load code onto the board; this can be simply made by connecting the USB cable to the computer. In addition, the board development environment comes with a simplified version of C++ language, which makes it easier to program.
2.8. Software Used to Run the Mixer
The code written inside Arduino IDE, an open-source software, will be represented and interpreted in the following set of figures, colors are relevant for an easy understanding of inserted libraries, functions, types of code.
Figure 1 captures the beginning of the code with libraries that interact with a specific component and in addition “#include” command is used for an external library called “SoftwareSerial.h” that allows the use of two Arduino boards. In
Figure 2 pins that are used are here defined and their functionality together with global variables.
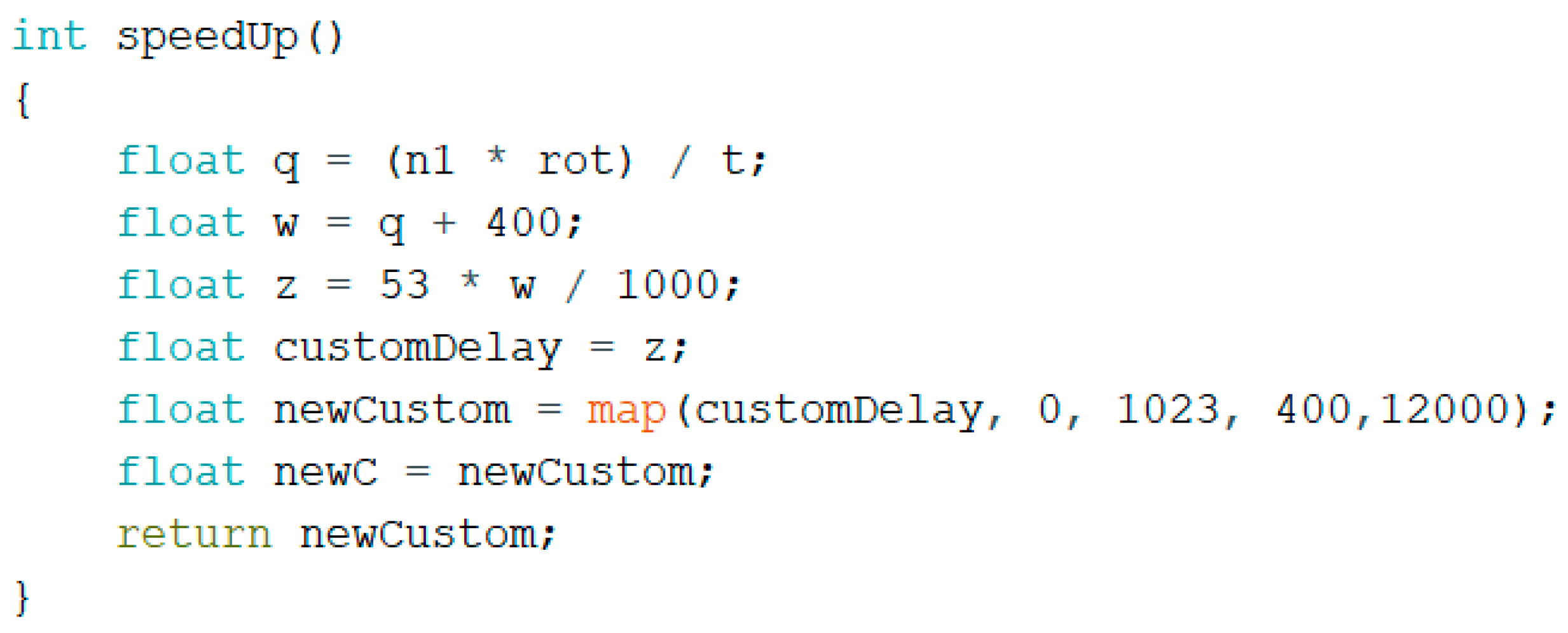
Figure 3 comes with the setup function, here is defined the initial state of the board upon boot, here the stepper motor speed was defined inside the “speedUp()” function and in
Figure 4 that is still a setup function, the stepper motor was initialized for running at certain parameters. The loop function, presented in
Figure 5 runs the code inside it in a loop. Here, the code is to calculate the number of turns of the stepper motor in order to push the piston inside the cylindrical tube to move the first gas in the mixer.
3. Experiments
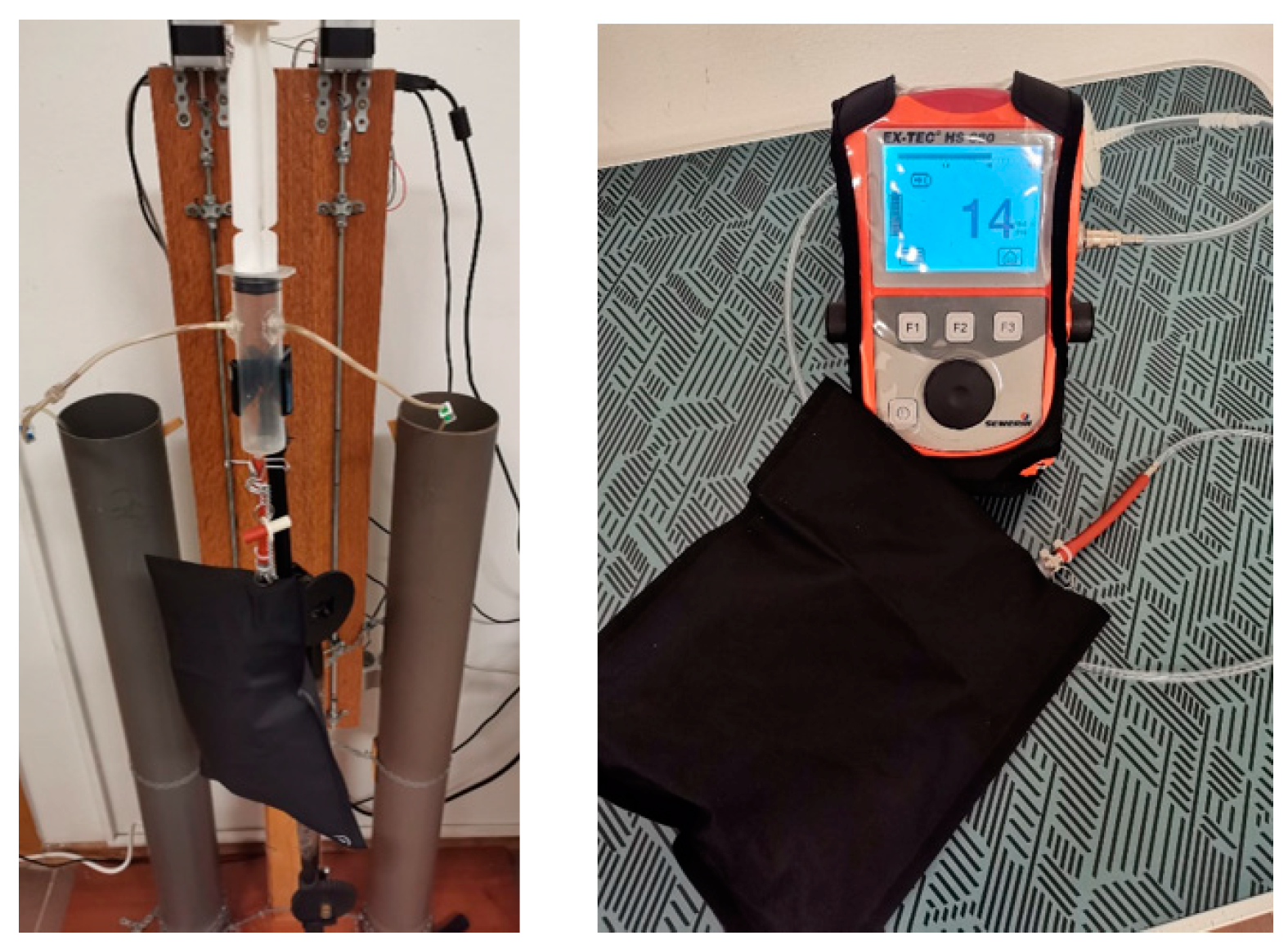
The main components of the computerized stand can be viewed in
Figure 6 and listed in
Table 1. The mode of operation is described in the following. Inside the syringe pump, cylinders gases are stored at known concentrations. The initial volume of the cylinders is 10 cubic decimeters, with an inner diameter of 1 cubic decimeter, in which the gases move through the circuit without valves, reaching the mixing and homogenization chamber. Here, an agitator with a propeller powered by an electric motor performs the homogenization of the mixture, and the gas mixture is released for use through the outlet nozzle.
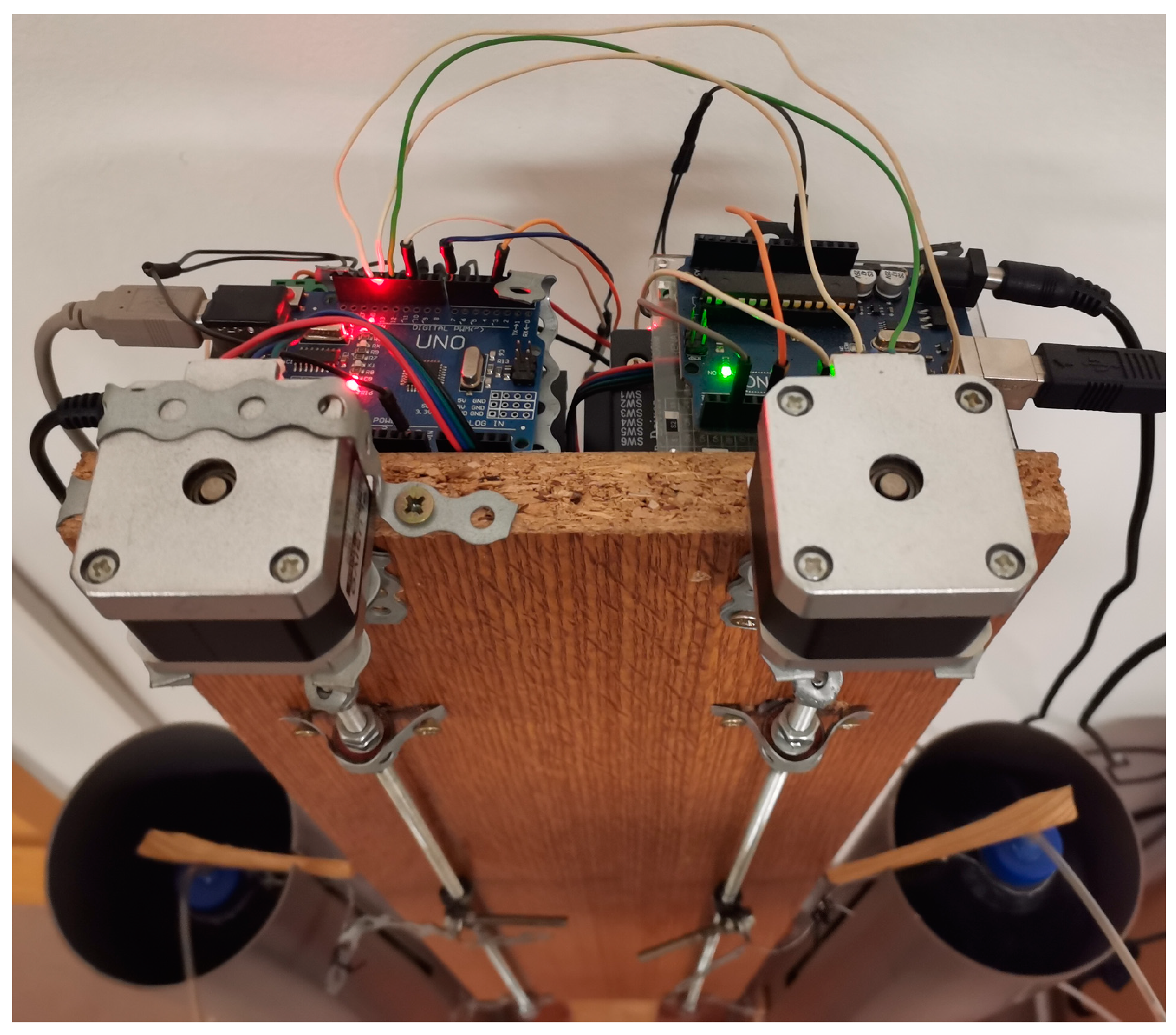
The concentration is verified with a gas sensor that sends the concentration value to a display. This value is first programmed by the computer that communicates biunivocal with the microprocessor for the entire control of the mixer. The control of the driver [
13] and the control of the stepper electric motors are seen in
Figure 7, powered with electricity by a multiple electric source. Thus, through the mechanical couplings and the mechanical assembly, the rotational motion is transformed into a translational motion in a controlled manner, so that the pistons of the injectors are actuated to obtain the discharged volumes according to the predetermined calculation program, volumes that are introduced into the mixing and homogenization chamber.
Mathematical Algorithm
Up next is an example of a calculation algorithm used to achieve the flammable gas concentrations. To obtain the desired gas concentration, certain input parameters are required, respectively:
- (a)
Volume Vi = 3500 mL;
- (b)
Diameter d = 100 mm;
- (c)
Section surface S = 7853.75 mm2;
The threaded rod has a diameter of 6 mm, which results in a step of 1 mm per coil. Thus, a turn with a step of 1 mm results in a calculated volume of:
Other input parameters for the calculation algorithm are:
- (d)
The proposed time for making the mixture (for example) Δt = 120 s;
- (e)
The proposed volume of mixed gases to be achieved (for example) V = 1000 mL.
Knowing that for a 360° rotation of the stepper motor of 1 mm per step, we can obtain an amount of mixed gas of 7.8 mL and from here we can continue the calculation necessary to obtain the desired gas concentration. Thus, if a quantity of flammable gas with a concentration of 10% volumetric fraction is desired, with C
1 = 10% volume, the first stepper motor (motor A) will push 100 mL of flammable gas. This is noted as V
gas = 100 mL. For this, the stepper motor will turn as follows:
The second stepper motor (motor B) must push a quantity of 900 mL of air, necessary for the dilution of the flammable gas, and we note this with V
air = 900 mL. The stepper motor B will turn as follows:
At an angular speed of:
where:
n1 turns for the stepper A;
n2 turns for the stepper B;
ω1 angular speed of first stepper motor;
ω2 angular speed of second stepper motor.
The microprocessor is programmed to take and calculate all this input data, then it controls the stepper motors, so that at the output nozzle the desired amount of gas mixture (V) will be obtained at the concentrations set by the stand operator (C
1), in the settable time (Δt). A new design of the above mixer is displayed in the figure below,
Figure 8.
5. Conclusions
Obtained Measurements
Table 2 contains the concentrations obtained with the programmable gas mixer stand, expressed in volumetric fractions, within the methane gas explosion limit.
The explosion of a gas/air mixture in a closed space takes place according to physical laws and under the influence of sufficiently well-defined factors. The phenomenon becomes very complicated if the space where the explosion takes place communicates with another closed space or with several closed spaces where there are also explosive mixtures, at different concentrations. In such situations, the space adjacent to the one where the initial ignition took place will react under totally different conditions compared to the first one; the ignition source will be a strong one (the flame jet of the first explosion) and the initial pressure from which the combustion reaction starts will be determined by the influence of the initial explosion pressure.
The importance of this work lies, first of all, in the modern way of approaching the fundamental research on the problem of rapid combustion of gases. The study combines the method of visualizing density gradients, namely the Schlieren effect, with the recording, at increased speed, of real explosion-type phenomena, on a patented stand. The results and measurements obtained from the physical experiments serve, subsequently, within the same study, to define the parameters and calibrate the computerized simulations of gas explosions, thus perfecting the mathematical models by optimizing the values of the empirical coefficients and the standard functions implemented in the application for these types of problems.
Following some documentary research, other works are relevant, such as a flammable gas dispenser, for determining the parameters involved in combustion, explosion and detonation processes, consisting of a cylindrical glass tube, U-shaped with water, having a shorter, closed-dosing arm that is connected by an elastic hose, equipped with a shut-off valve at the test chamber and a buffer arm, having the same diameter, longer, open and provided with a glass level.
The computerized stand for the preparation of gas mixtures provides the material basis for the realization in the laboratory of volumes of homogeneous gas mixtures used in scale physical experiments of controlled explosions in parallelepiped tube filled with an explosive air/gas mixture, at programmable, verified concentrations, or to validate threshold values for devices with settable alert that detects flammable/toxic/asphyxiating gases.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




