Abstract
The design and optimization of re-entry spacecraft or its subsystems is a multidisciplinary or multiobjective optimization problem by nature. Multidisciplinary design optimization (MDO) focuses on using numerical optimization in designing systems with several subsystems or disciplines that have interactions and independent actions. In the present paper, the system-level optimizer, trajectory, geometry and shape, aerodynamics, and aerothermodynamics differential equations, are converted to algebraic equations using the Radau pseudospectral method (RPM) since a spacecraft is a nonlinear, extensive, and sparse system. The solution to the problem with the help of MDO is reached by iterating all the disciplines together; one can simultaneously enhance the design, decrease the time and cost of the entire design cycle, and minimize the structural mass of a re-entry spacecraft. Considering various methods presented in earlier research works, a combined and innovative all-at-once (AAO), RPM-based MDO method, including the key subsystems in the design process of a re-entry capsule-shape spacecraft with a low lift-to-drag ratio (L/D), is presented. Considering the applicable state and control variables, various constraints, and parameters applied to several geometric shapes of a blunt capsule and using Apollo’s aerodynamic and aerothermodynamic coefficients, the optimized dimensions for a re-entry spacecraft are presented. The introduced optimization scheme led to a 17% mass reduction compared to the original mass of the Apollo vehicle. Fast computing and simplified models are used together in this method to analyze a wide range of vehicle shapes and entry types during conceptual design.
1. Introduction
Space travel involves dealing with physical, technical, and scientific difficulties; space is a hostile and unfriendly environment without air or gravity and with high levels of ionizing radiation. Our planet, Earth, is surrounded by air composed of nitrogen, oxygen, and other gases, called the atmosphere. Upon entering the atmosphere, the spacecraft experiences drag, which exerts mechanical stress and compression of the air in front of the spacecraft, which in turn causes heating. Good design, such as optimizing the shape of a re-entry spacecraft with considering the amount of heat flux, can reduce the overall mass and cost of a mission and reduce the risk of passenger injury or loss, where applicable.
As also stated in Section 4.1.7 of [1], and in space operations documents (Returning from Space: Re-entry) published by the Federal Aviation Administration (FAA), all space-mission planning begins with a set of requirements that we must meet to achieve mission objectives. The re-entry phase of a mission is no different, and one must delicately balance three often competing requirements, namely deceleration, heating, and accuracy of landing or impact. Once all trajectory possibilities have been exhausted, one can turn to options for vehicle design, where two ways to meet mission requirements exist, i.e., vehicle size and shape, and thermal protection systems (TPS).
The re-entry vehicle’s size and shape help determine the ballistic coefficient (BC) and the amount of lift it will generate (most re-entry vehicles are considered nonlifting due to the added complexity of lift in the re-entry analysis). The most challenging component of BC to determine for re-entry vehicles is the drag coefficient, CD, which depends mainly on the vehicle’s shape. In addition, it is essential to notice how varying BC changes a re-entry vehicle’s deceleration profile and affects the maximum heating rate.
A more streamlined (high-BC) vehicle reaches maximum deceleration much lower in the atmosphere than a blunt (low-BC) vehicle (i.e., effects of vehicle shape), and the atmosphere can also significantly decrease re-entry accuracy. Therefore, the designers want the vehicle to spend as little time in the atmosphere as possible, which makes a streamlined vehicle desirable for better accuracy, even though one must accept more severe heating rates. Thermal protection systems can deal with this heating. Effects of vehicle shape on the re-entry corridor are also another factor to be considered as the corridor’s upper or overshoot boundary depends on the minimum deceleration for atmospheric capture [1].
The spacecraft optimization design involves a variety of disciplines, including aerodynamics, aerothermodynamics, guidance and control, structure, and cost. Considering the difficulties in its progress, it has been evident from the start that the design of such systems requires a compromise between numerous domains of knowledge. Many efforts have been made in this area, the most recent of which are summarized and briefly discussed in the following section.
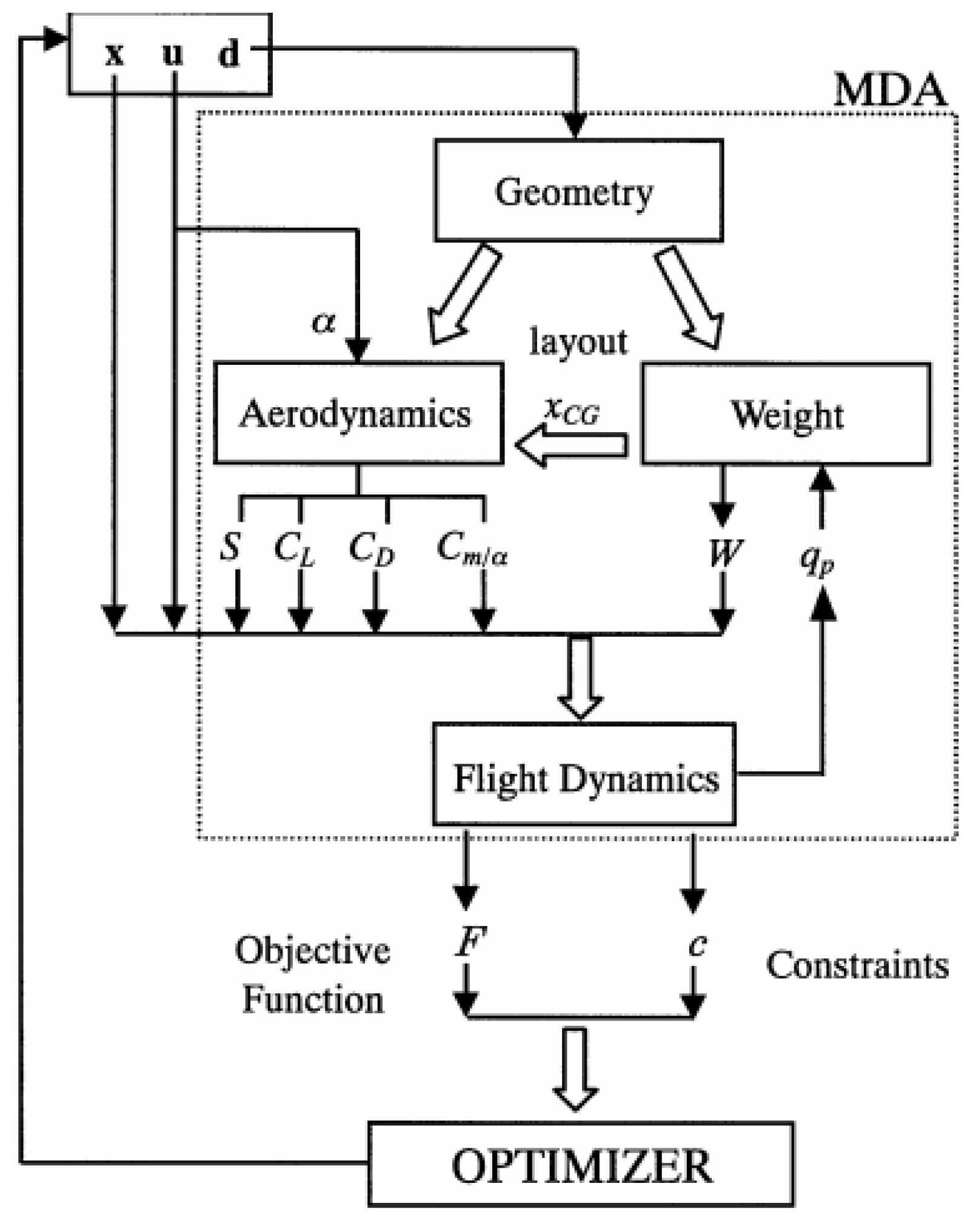
The problem of re-entry spacecraft shape optimization has been addressed in several publications. The multidisciplinary optimization of re-entry spacecraft has been discussed by Tava and Suzuki [2], considering four crucial disciplines, namely geometric shape, weight, aerodynamics and flight dynamics, and their block diagram is shown in Figure 1. The authors accentuated on the complexity of the disciplines and their conflicts; however, less emphasis was made on their optimization method, the accuracy of modeling the disciplines, and their chosen approach—multidisciplinary design feasibility (MDF), a time-consuming and costly method.
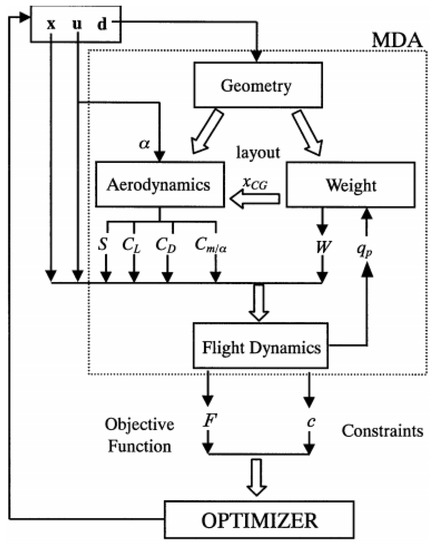
Figure 1.
MDF architecture for re-entry spacecraft [2].
Mor and Livne [3] investigated the trajectory and the thermal protection system (TPS) for a flight vehicle using the multidisciplinary optimization method. The article highlighted the interdisciplinarity of disciplines and their conflicts (their achieved model is shown in Figure 2 for reference).
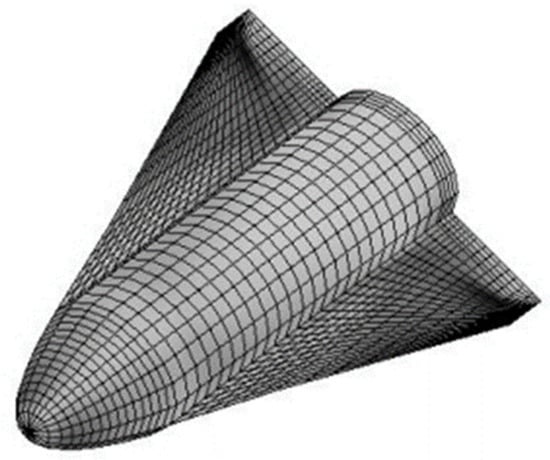
Figure 2.
Optimized shape of a flight vehicle with considering TPS [3].
The MDO of a re-entry capsule was presented by Nosratollahi et al. [4], with structure, aerodynamics, and aerothermodynamics modules in place. The authors compared their results using two optimization methods: the multiobjective optimization method and a new optimization approach based on a genetic algorithm. The objective function used in [4] is the mass reduction of the entire system in terms of aerothermodynamics and aerodynamics constraints. Finally, several nose-shape designs were achieved by increasing the weight of each module and adjusting their factor of importance in optimization (Figure 3).
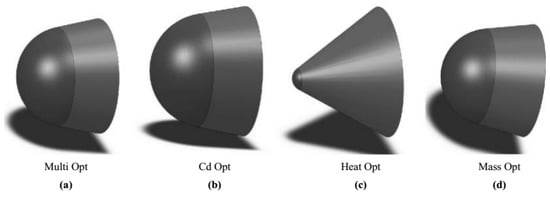
Figure 3.
Configuration optimization results with different objectives [4]. (a) Multi Opt, (b) Cd Opt, (c) Heat Opt, (d) Mass Opt.
Nosratollahi et al. [5] proposed an optimized design of the aerodynamic structure for a capsule to reduce the heat absorption and drag coefficient. They proposed a feasible region so that the designer can decide without having to solve the problem to find the best solution. Later, Adami et al. [6] performed the optimum design of the aerodynamic structure for the same capsule presented by Nosratollahi et al. [5], where they added the structure’s discipline, simultaneous minimization of drag coefficient, heat absorption, and mass in their model. Like in the previous work, Adami et al. [6] used the search method to perform the optimization of the design. Later, Nosratollahi et al. [7] provided the optimized design of a controllable re-entry capsule using a multidisciplinary optimization and search method, where the minimum landing speed and minimum mass were selected as the objective function. The MDO of a manned capsule was also addressed by Adami et al. [8], considering the geometric shape and re-entry trajectory, with the criterion of minimizing the vehicle’s mass and adhering to the heat flux, aerodynamic, structural, and flight path constraints, frequently observed in the all-at-once (AAO) method.
In the book by Dirkx and Mooij [9], multidisciplinary optimization methodology was established and applied to the shape optimization of two classes of re-entry vehicles: a low lift-over-drag or blunt capsule (such as the Apollo); and a winged vehicle, such as the Space Shuttle. The emphasis is put on cubic Hermite splines and spline surfaces when using the multiobjective particle swarm optimization (MOPSO) algorithm. The presented method was reported to take 1 h to optimize the capsule-shaped vehicles. Capsule shapes with different dimensions are achieved with different ranges by changing the stagnation point heat load constraint (Figure 4).
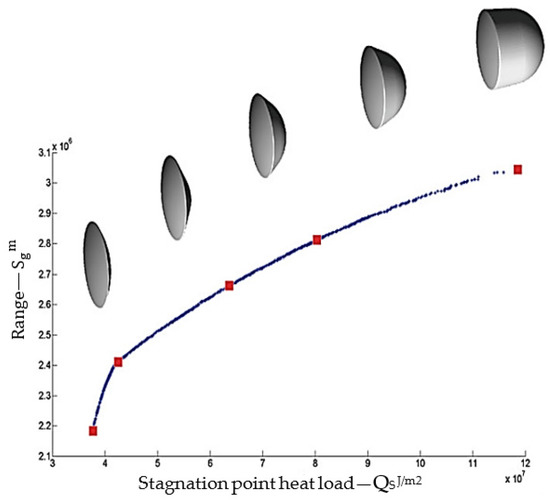
Figure 4.
Evolution of capsule shapes along Sgm − QS J/m2 [9].
The re-entry trajectory optimization problem for hypersonic vehicles in this paper has been studied recently by Yu et al. [10]. The authors indicate that two drawbacks exist to this topic. Firstly, there is no consideration for navigation errors caused by blackout zones in re-entry trajectory optimization models. Second, a solitary methodology is regularly applied to enhance the re-entry trajectory, which neglects to cover its deficiency by consolidating it with different approaches. To this end, a hybrid particle swarm optimization (PSO)–Gauss pseudo-method (GPM) algorithm, specifically the mixed PSO-GPM calculation, is proposed to optimize the re-entry trajectory in this paper. The authors suggested combining other metaheuristic algorithms and pseudospectral methods to solve more complicated optimization problems.
Upon completion of the review of several articles on re-entry spacecraft presented in the previous section, in what follows, the MDO of a re-entry spacecraft or a space capsule is implemented in a combined and innovative method. The all-at-once (AAO) approach to the MDO of a re-entry capsule-shape spacecraft with a low lift-to-drag ratio (L/D) is achieved using the RPM optimization method, where a semiballistic trajectory, considering the geometry and shape, aerodynamics, and aerothermodynamics disciplines are used. Considering variables, constraints, and various parameters and maximizing the re-entry spacecraft’s cross-range as the objective function, the optimized dimensions leading to the reduction in the mass of the capsule are achieved and presented. The MDO method is validated using the available data for the Apollo re-entry capsule. The optimal solution is reached through several iterations to ensure that optimality conditions are satisfied. It is found that the mass of the optimal capsule generated using the proposed method is more than 17% lower than Apollo’s. To the author’s best knowledge, the application of the AAO-RPM approach to the MDO of a re-entry capsule-shape spacecraft has not been reported in the open literature, which could be considered the main contribution of this paper.
The structure of the paper is as follows: Section 2 presents the Methodology, where the Problem Architecture and Optimization Method, are presented in Section 2.1 and Section 2.2, respectively. Section 3 presents the Modeling Approach, where Modeling (Section 3.1), Boundary Condition and Constraints (Section 3.2), and Objective (Section 3.3) are presented. In Section 4, the results and a discussion of them are provided, followed by final conclusions summarizing the most important achievements of the presented work.
2. Methodology
2.1. Problem Architecture
The design of multidisciplinary systems (e.g., aircraft, spacecraft, automobiles) often requires an iterative cycle that includes a design initialization, a system analysis, a sensitivity analysis, and design optimization. The name of this standard design cycle in the field of MDO, often referred to as the multiple-discipline-feasible (MDF) approach, stems from the fact that complete multidisciplinary feasibility is maintained in each design cycle. The MDF, however, can be a costly procedure. Alternate means for posing and subsequently solving the multidisciplinary design problem have therefore been developed. The simultaneous analysis and design (SAND) and all-at-once (AAO) approaches treat the entire multidisciplinary design cycle as one large optimization problem, whereas the individual-discipline-feasible (IDF) approach exhibits characteristics that lie in between the two extremes exemplified by MDF and AAO. IDF assures that each discipline is feasible on every design cycle while driving the entire system (all disciplines) towards multidisciplinary feasibility [11]. The all-at-once (AAO) approach is deemed to be the most efficient, the fastest, and the least costly method in comparison with IDF and MDF methods for enormous and sparse problems, as also stated by Cramer et al. [12]. An overview of the AAO architecture used in this paper is presented in Figure 5 below [13].
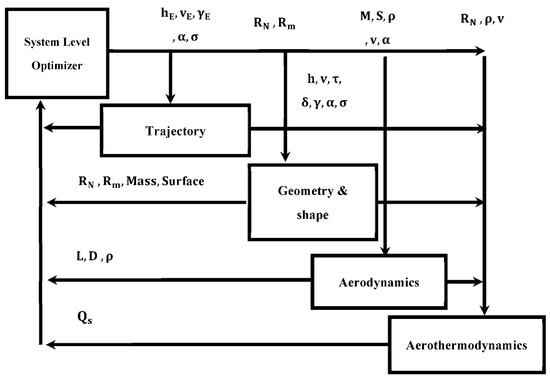
Figure 5.
Design structure matrix (DSM) of AAO architecture for re-entry spacecraft [13].
The system consists of five blocks [13]: system-level optimizer, trajectory, geometry and shape, aerodynamics, and aerothermodynamics. It is worth mentioning that in contrast to the research work presented by Nosratollahi et al. [4], in the present study the trajectory is considered as a discipline, i.e., the trajectory is changing and optimized with other constraints. All the disciplines are represented by governing differential equations converted to algebraic equations. The solution to the problem is reached by optimizing all the disciplines together.
2.2. Optimization Method
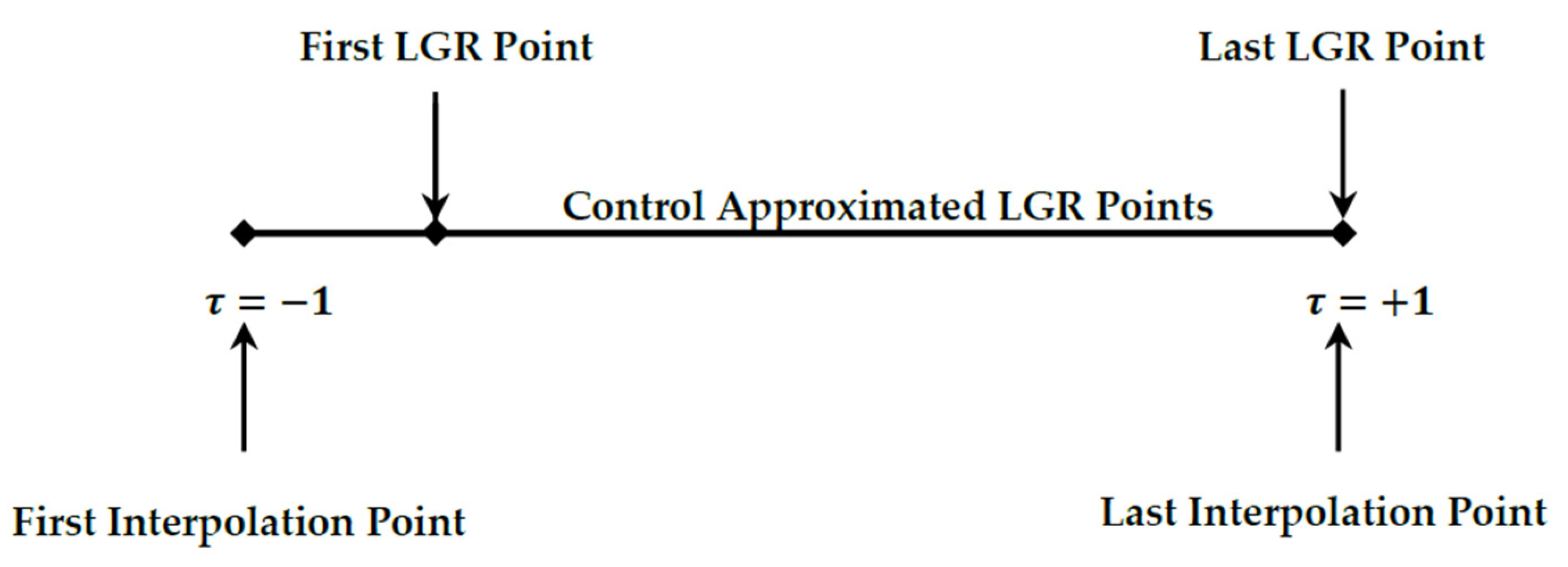
In general, nonlinear optimal control problems for atmospheric and space flight vehicles do not have analytical solutions. MDO of a re-entry spacecraft is a nonlinear problem with coupled controls and states. Therefore, steepest descent or other optimization methods cannot be used to solve it. These types of very large and sparse problems can be solved using the pseudospectral method. The Gauss Pseudospectral Optimization Software (GPOPS) is used to converge to a solution using the initial guess from nonlinear inversion and dynamic programming. GPOPS is a general-purpose MATLAB software for solving continuous optimal control problems using hp-adaptive Gaussian quadrature collocation and sparse nonlinear programming [14]. GPOPS-II, used in the present study, uses the Radau pseudospectral method (RPM) to solve optimal control problems. The RPM is an orthogonal collocation method with the Legendre–Gauss–Radau collocation points [15] (see Figure 6). A Gaussian quadrature implicit integration scheme, the RPM has been demonstrated to converge exponentially fast for problems whose solutions are smooth. To achieve a consistent solution in states, costates, control, and corner conditions, the pseudospectral method is applied.
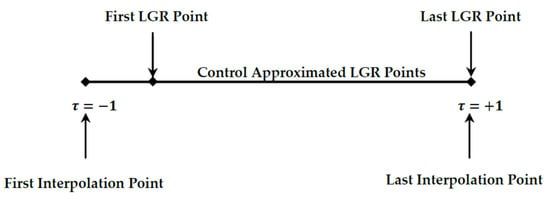
Figure 6.
The Radau pseudospectral method (RPM), adapted from [15].
3. Modeling Approach
3.1. Modeling
The trajectory and the shape of a capsule or a reusable spacecraft are affected by many disciplines such as trajectory (equations of motion), aerodynamics, and vehicle heat transfer, which will be discussed in the following sections. In brief, there are three types of re-entry trajectories: ballistic, semiballistic, and maneuverable trajectory, in which control and guidance of the vehicle are different in aerodynamic force that is related to lift-to-drag ratio (L/D) and active control force.
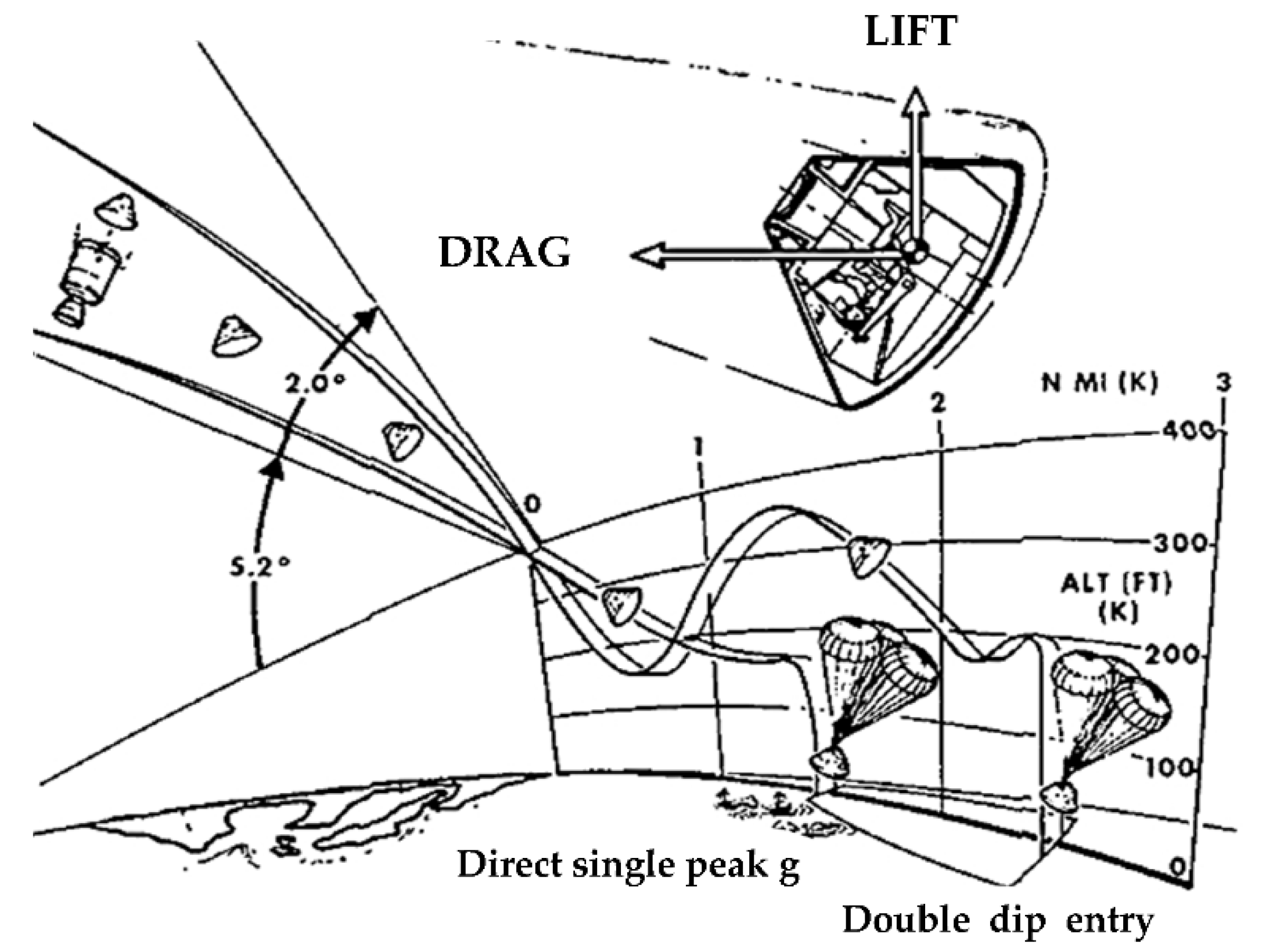
A semiballistic trajectory is a class of spacecraft guidance and re-entry trajectories that extend the range of suborbital spaceplanes and re-entry vehicles by employing aerodynamic lift in the high upper atmosphere. A series of skips allows the range to be further extended and leads to the alternate terms skip-glide and skip re-entry (see Figure 7 [16] for Apollo capsule skip re-entry).
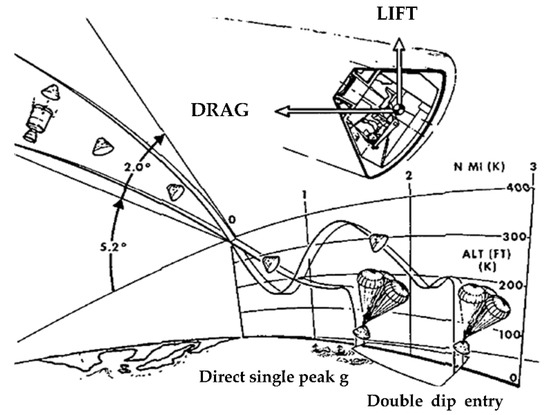
Figure 7.
Illustration of lift and drag relative to CM entry. NASA, with additional entry annotation [16].
- A.
- Earth and Atmosphere
The earth has been assumed to be a perfect, nonrotating sphere. The acceleration due to gravity is given by Newton’s inverse square law [17]. The density variation with altitude is assumed to be exponential and given by the relation:
- B.
- Aerodynamic Model
All defined design variables are affected by the aerodynamic optimization process. The objective of the aerodynamic design process is to generate a ballistic coefficient and lift-to-drag ratio (L/D) that is optimal for the aerothermodynamics and trajectory disciplines, respectively.
Forces affecting re-entry of a spacecraft include gravitational potential, drag, and lift. The initial guess of lift, drag, and slip coefficients uses parameterization of a parabolic surface. The drag coefficient is used to determine drag force. Assuming a ballistic case, the predominant force impacting the aerodynamics of a capsule re-entry is a drag. A good metric to compare aerodynamics of various shape designs is the ballistic coefficient, defined according to drag coefficient, mass, and surface area.
With feedback from trajectory and aerothermodynamics disciplines, the aerodynamic discipline will vary drag coefficient by changing design geometry to generate more optimal solutions. Initial shape parameters of the Apollo 11 re-entry capsule will be used [4,16]: CL0 = 0.0005, CL1 = −0.0176, CD0 = 0.0262, CD1 = 0.0059, CD2 = −0.0145.
- C.
- Equations of Motion
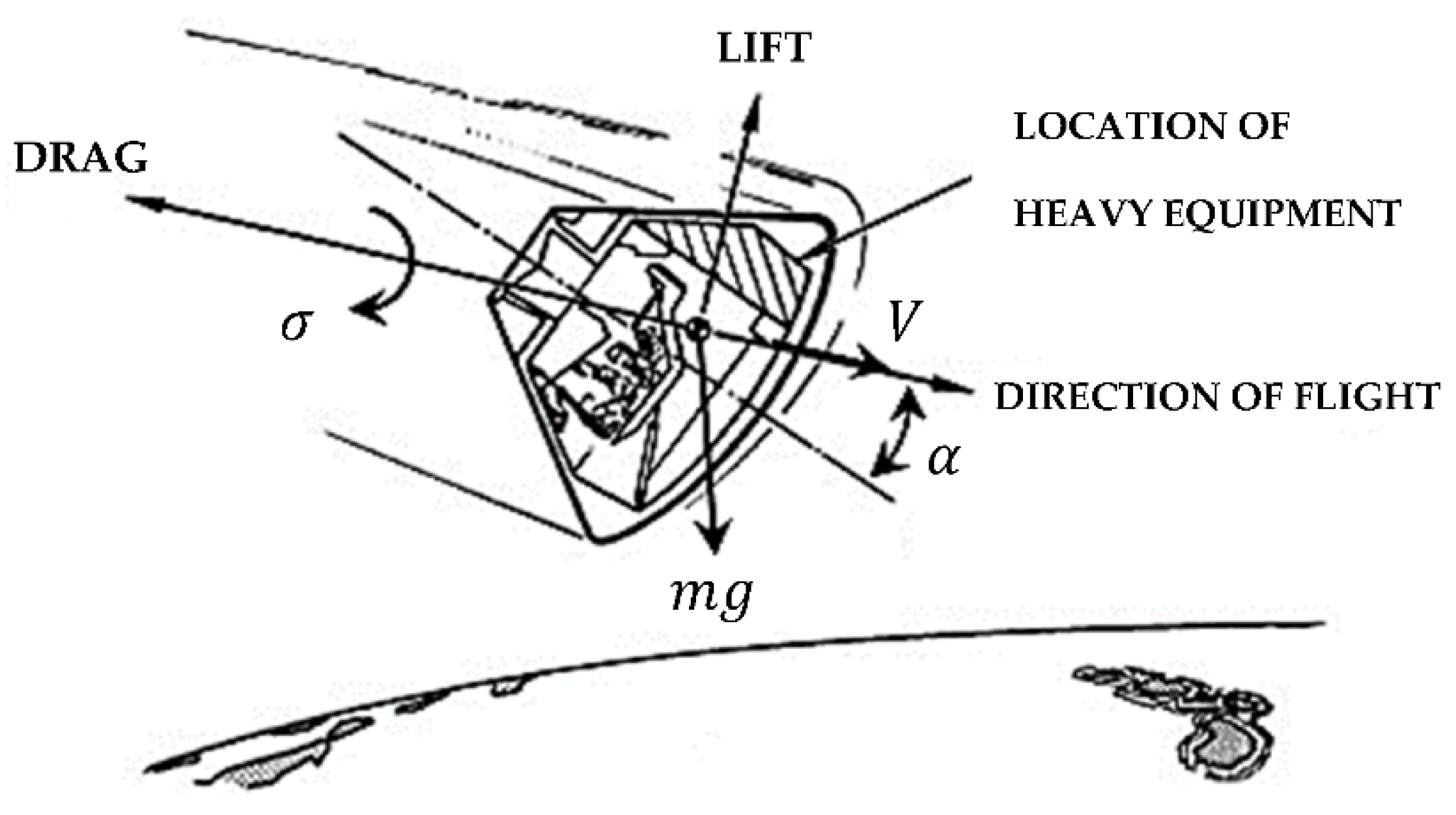
In this section, the equations of motion are used to determine the trajectory of the re-entry spacecraft are described. First, the reference frame used in the computations is wind or velocity axis system. The resulting equations of motion in spherical coordinates for a re-entry problem will then be discussed. If the summation of all the forces shown in Figure 8 is presented in the wind frame, the six state equations of vehicle mass center are [17]:
where the trajectory parameters are:
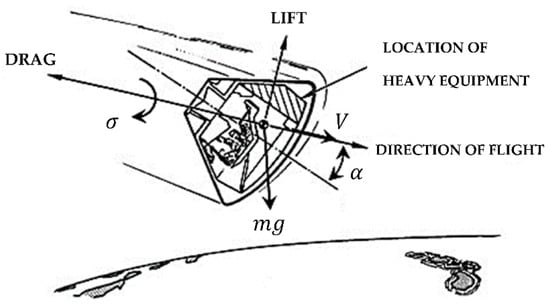
Figure 8.
Spacecraft trajectory in the wind axis system [16].
r: Altitude;
ϕ: Longitude;
θ: Latitude;
α: Angle of attack;
v: Velocity;
γ: Flightpath angle;
ψ: Azimuth;
σ: Bank angle.
- D.
- Stagnation Point Heat Rate
High heat fluxes are experienced during re-entry as a result of the hypersonic velocity, which presents a significant design challenge. To evaluate the performance of a re-entry vehicle, a model for its aerothermodynamic performance is needed. Some conceptual design tools can be used to estimate the heat transfer to critical areas of the vehicle. As also stated by Cavallero [18], the radiation is negligible for entry velocity below 9 km/s and hence is not included in the evaluation. The stagnation-point heating rate is modeled by using Equation (10), as given in the book by Dirkx and Mooij [17], which gives the heat load during the re-entry phase:
- E.
- Dynamic Pressure Constraint
Maximum load factor ntot, which is the maximum total aerodynamic deceleration experienced by the capsule, is determined from the following Equation [16]:
The aerodynamic coefficients vary only marginally over the trajectory of a capsule. This, along with the form of Equation (11), leads to the fact that the point of maximum load factor will be very close to the point of maximum dynamic pressure qdyn. For this reason, considering the qdyn constraint separately for capsule-shaped vehicles is unnecessary [17].
- F.
- Controls
For the capsule, an ideal guidance and control system is used so that the commanded attitude angles (α, σ) are assumed to be achieved instantaneously by the vehicle [17].
- Angle of attack α—the requirement of longitudinal stability is met if the aerodynamic center lies behind the center of gravity, which −30 deg < α < 30 deg [19].
- Bank angle σ—by setting the = 0 this condition is satisfied, while keeping the flight-path angle as large as possible, which will increase the vehicle’s range. It follows that:
- G.
- Capsule Geometry and Properties
Listed below are the capsule geometric parameters that will be varied. These parameters are selected due to their significant impact on the objective function [20].
- RN: Nose radius;
- Rm: Mean radius;
- RS: Corner radius;
- M: Structure mass;
- θN: Nose angle;
- LC: Cone length.
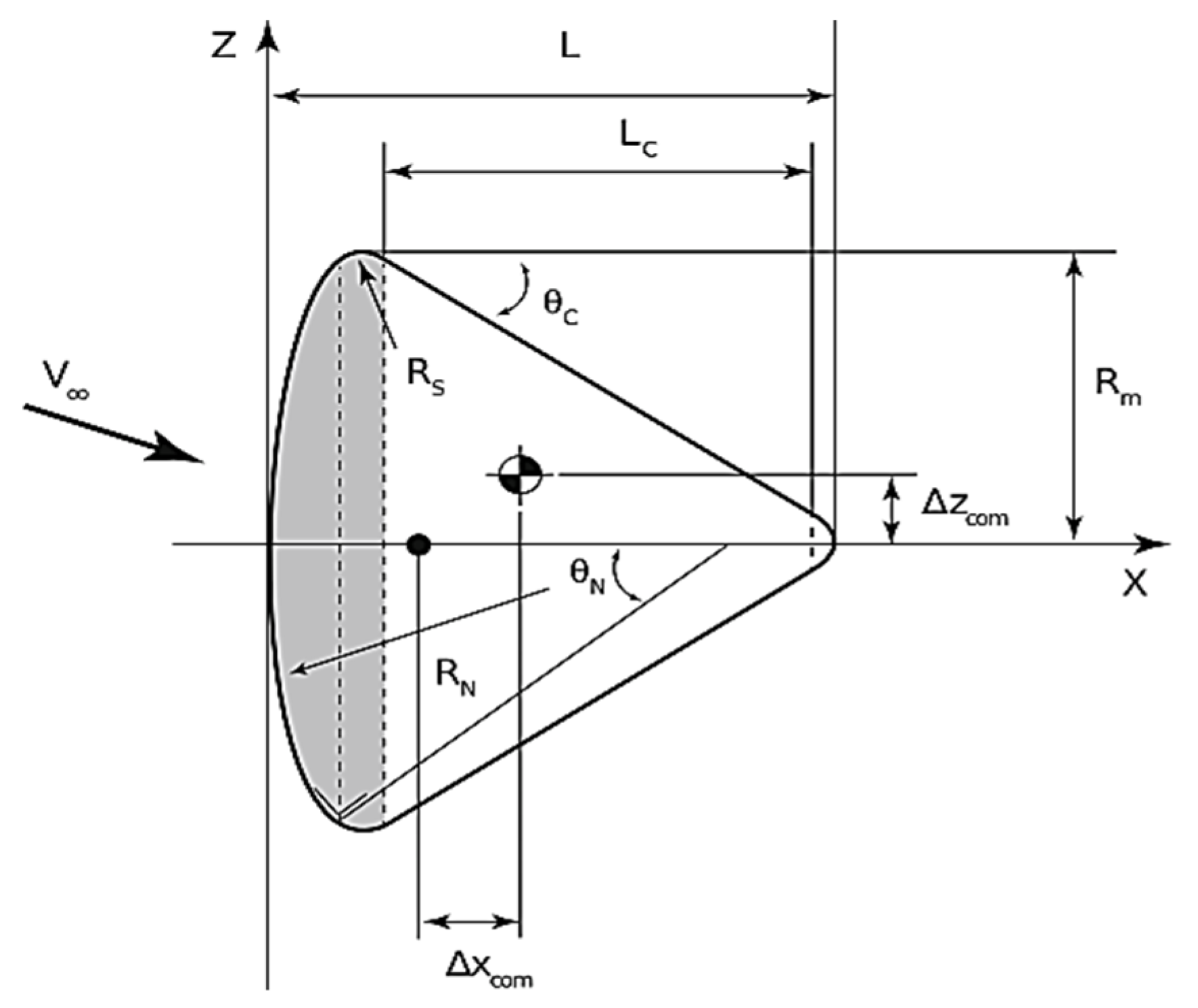
The above parameters are described in the schematic in Figure 9. Other geometric parameters are computed as a function of the selected design variables. Therefore, they are not considered independent variables.
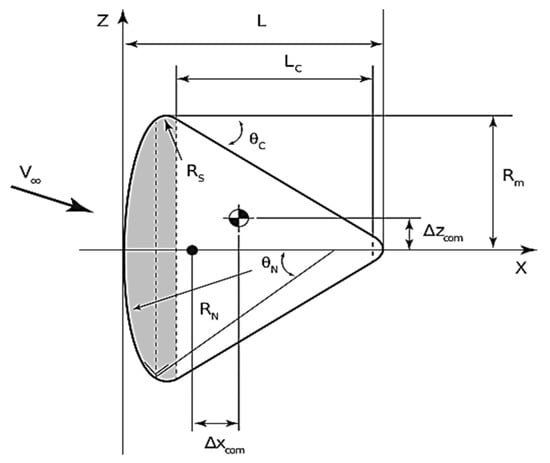
Figure 9.
Schematic of re-entry capsule, describing geometric parameters [20].
Apollo capsule is the reference of the geometry for use in geometric relations, so the mass of the capsule will be determined with this equation: . Therefore, there is a geometry proportion between this sample and Apollo geometry, except for RS; because of heat flux in corners, RS should be limited with Equation (13). This method generates an error, but the authors of [9] did not offer a solution to address this.
3.2. Boundary Condition and Constraints
Boundary conditions and constraints on states, controls, and geometry parameters are stated as follows:
- Initial Conditions:
Latitude = 0 deg, Longitude = 0 deg
Altitude = 120 km, Speed = 7.830 km/s
Azimuth = 90 deg, Flightpath angle = −2 deg
- Terminal Conditions:
Latitude = 30 deg, Longitude = 90 deg
Altitude = 5 km, Speed = 250 m/s
Azimuth = −10 deg, Flightpath angle = −2 deg
- Controls Constraints:
−30 deg < Angle of attack α < 30 deg
−90 deg < Bank angle σ < 90 deg
- Geometry Constraints:
3m < RN < 7m
0.5m < Rm < 3m
3.3. Objective Functions
The objective is determined to find the control variables, angle-of-attack, and bank angle deflections that would maximize the re-entry vehicle’s crossrange and indirectly reduce the heat flux and the mass. Maximizing crossrange would be the same as maximizing the latitude at the final time when the re-entry occurs along the equatorial line [17]. The problem is a Mayers problem and can be represented as:
4. Results and Discussion
In the present study, the optimal solutions to the MDO problem, considering a re-entry vehicle with a lift-to-drag ratio (L/D) similar to Apollo, were achieved using an RPM approach and around 300 iterations. The problem consists of finding the optimal RN and control variables during the re-entry period [0,tf] that minimize the objective function Equation (14) subject to the six state differential Equations (4)–(9) and the derivatives of the control variables, the path constraints, and the boundary conditions described above.
The capsule configuration is assumed to be subjected to the heat load constraint, the entry speed of 7.830 km/s, the entry angle of attack of −2 degrees. Table 1 shows the properties of the optimal shape achieved alongside those reported for Apollo. As can be seen from Table 1, the mass of the capsule achieved through the presented method is found to be over 17% less than Apollo, and optimal RN and Rm are also tabulated.

Table 1.
Capsule optimal shape properties.
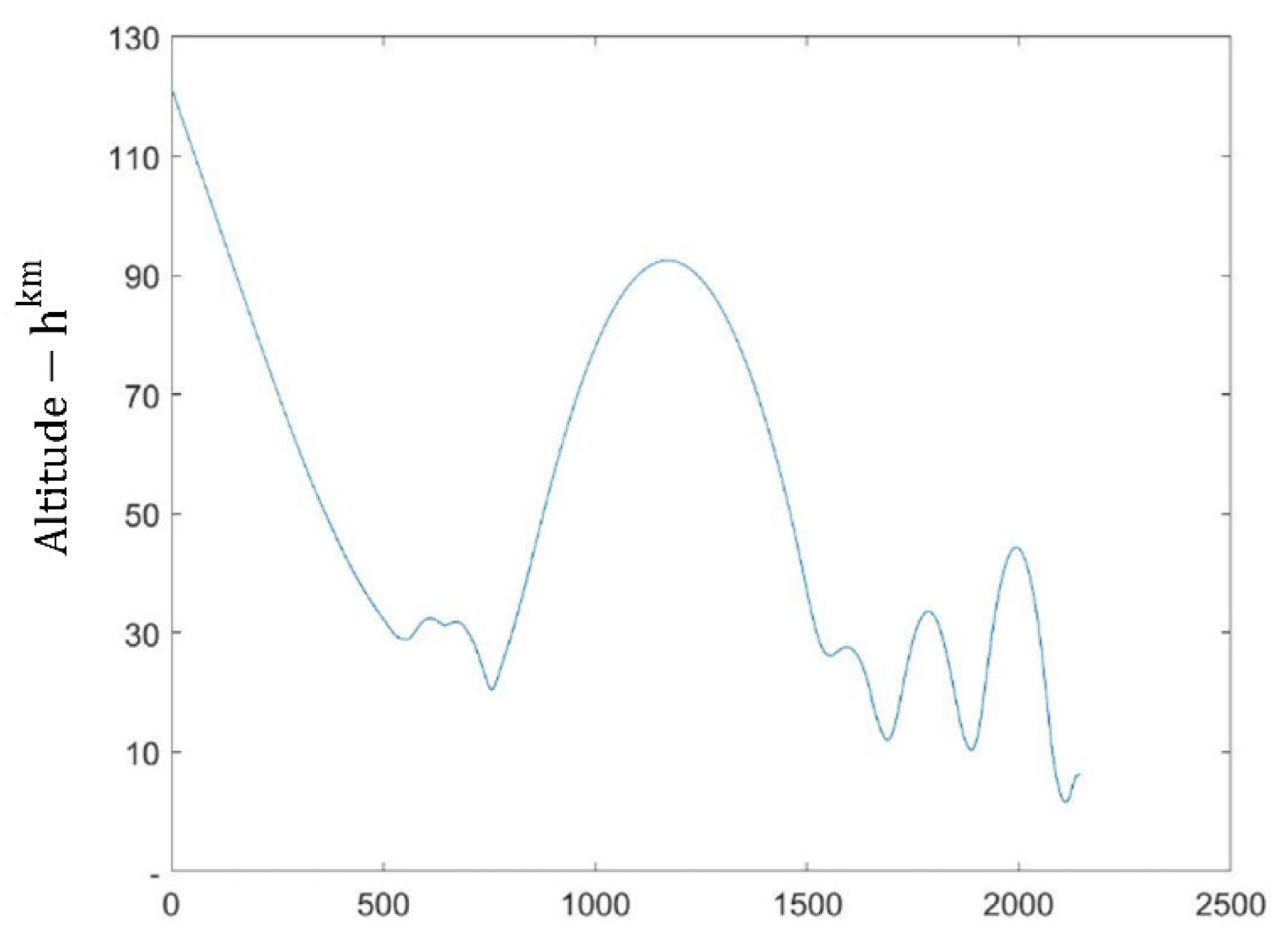
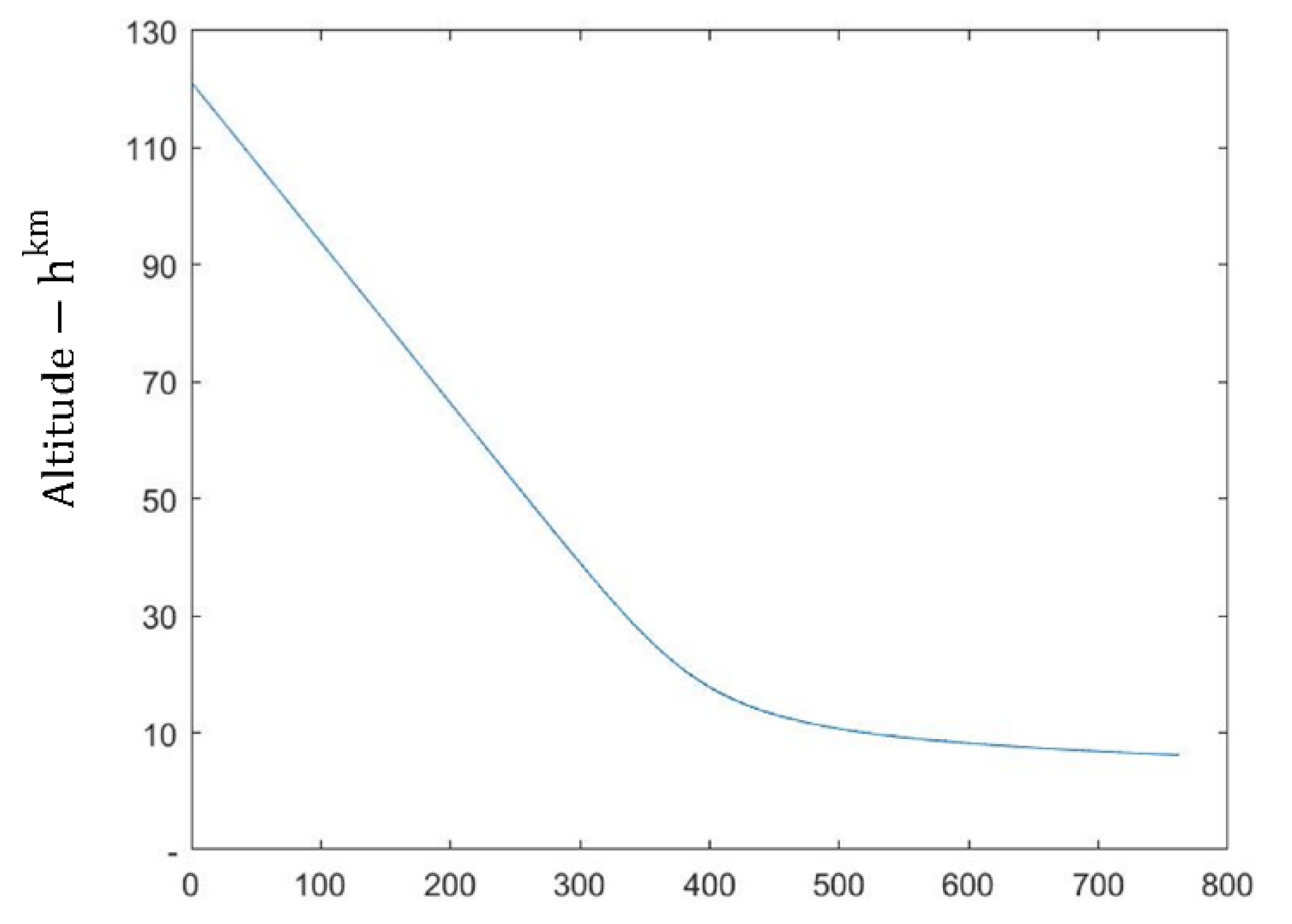
Figure 10 shows trajectory results obtained through the optimization process without enforcing dynamic pressure constraint. As seen from this figure, several large skips are observed, indicating that this is an infeasible solution. In contrast, Figure 11 shows trajectory results obtained through the optimization process while dynamic pressure constraint is enforced. As can be observed, this figure does not exhibit any large skips, meaning none of the flight path constraints are violated. The same trend is observed in all results achieved through the optimization process, which indicates the robustness of the method used.
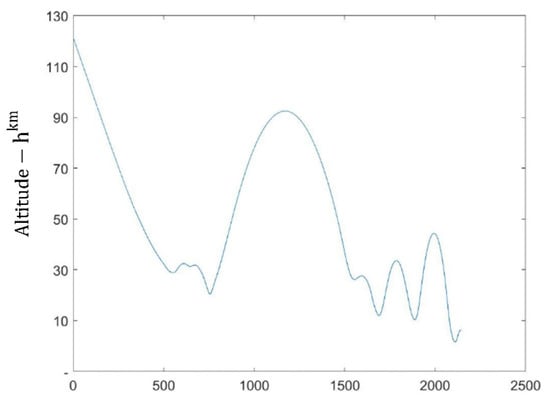
Figure 10.
Unconstrained trajectory—altitude vs. time .
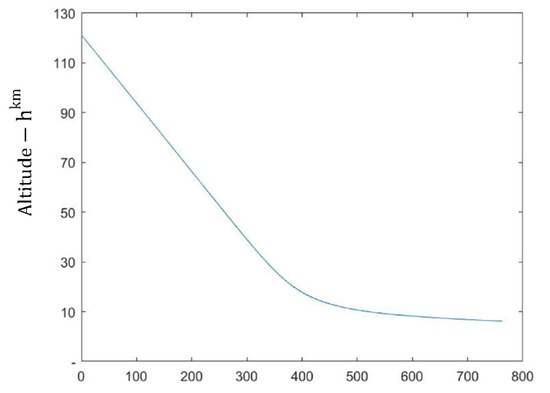
Figure 11.
Optimal conditions to satisfy trajectory—altitude vs. time .
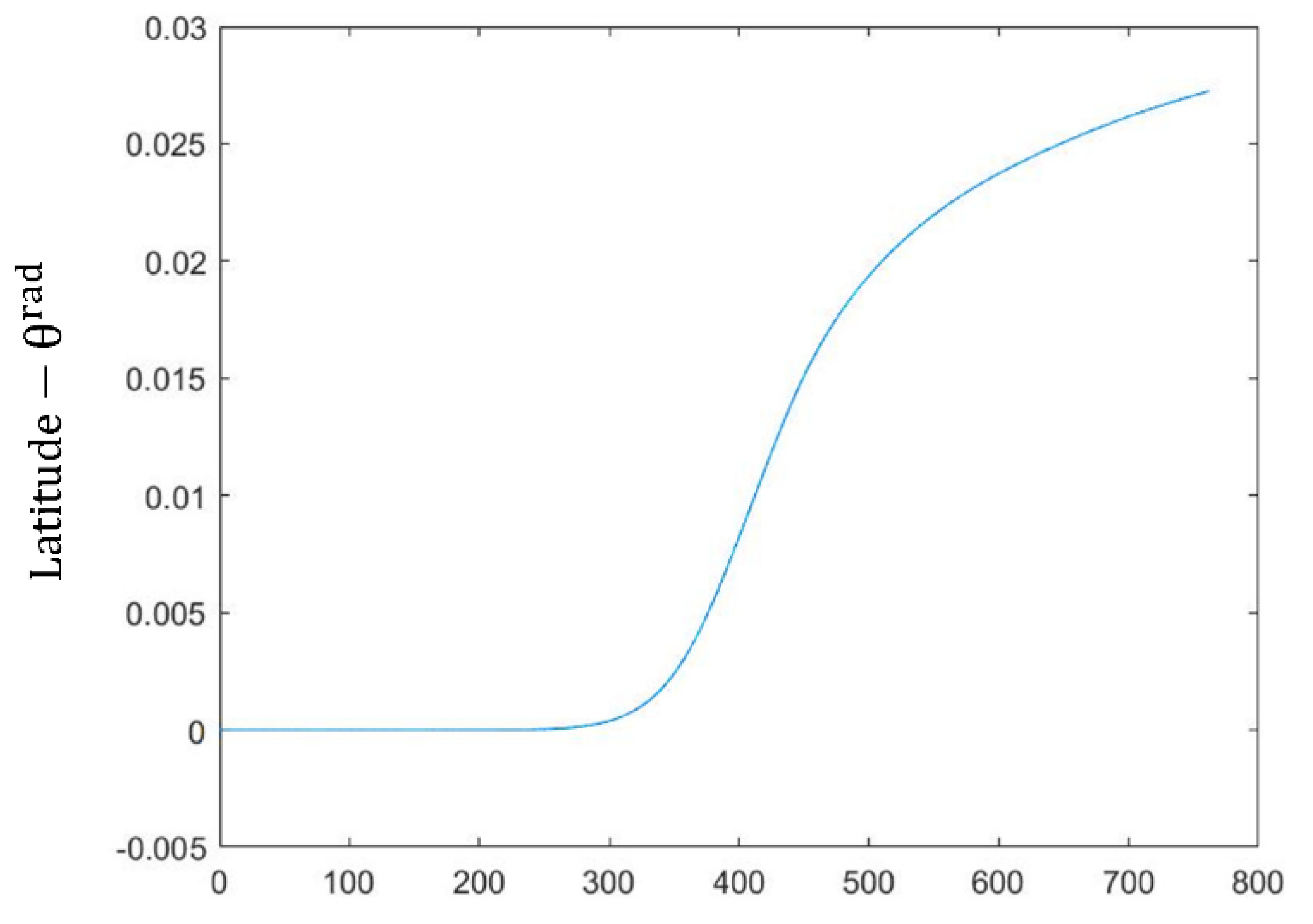
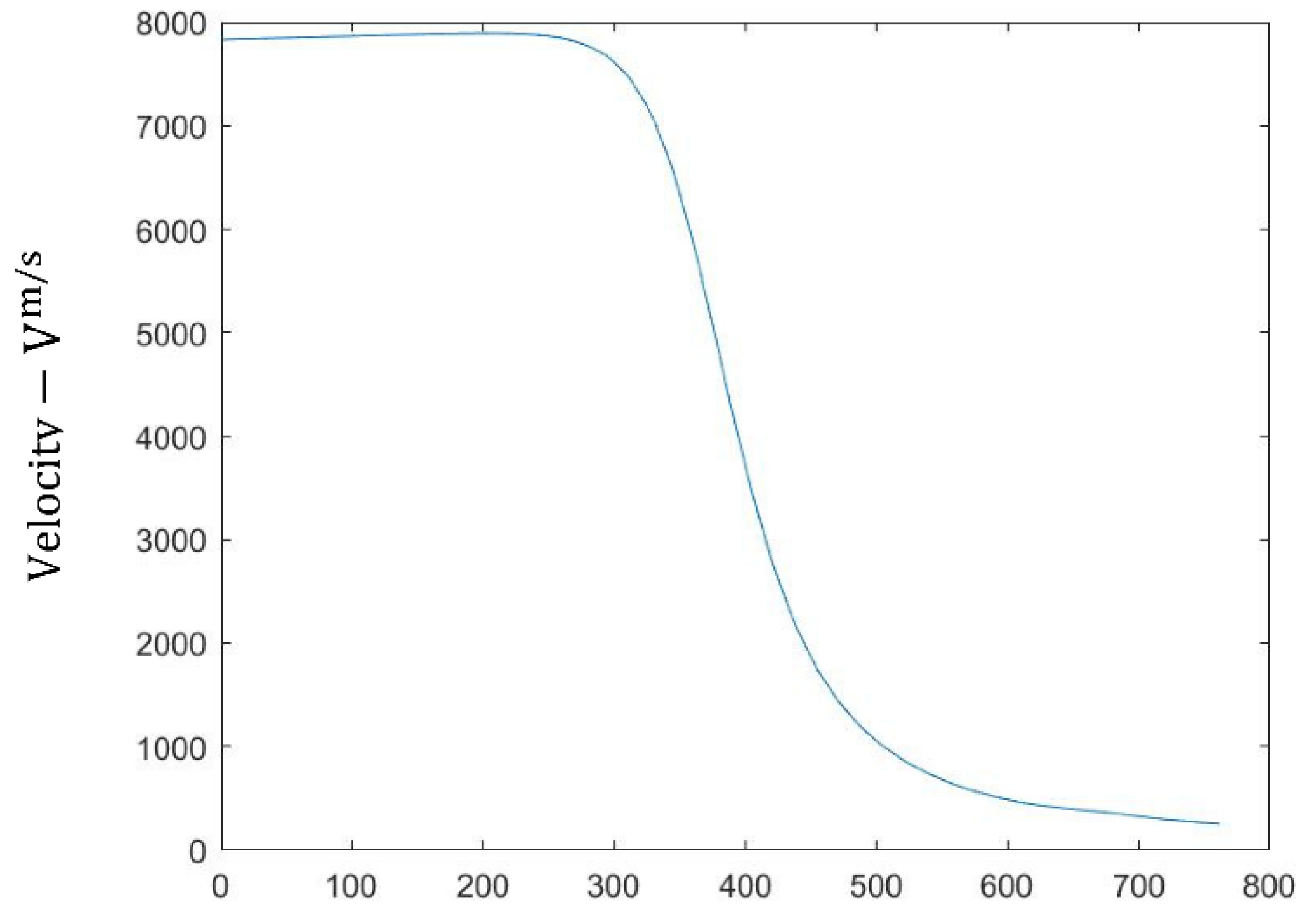
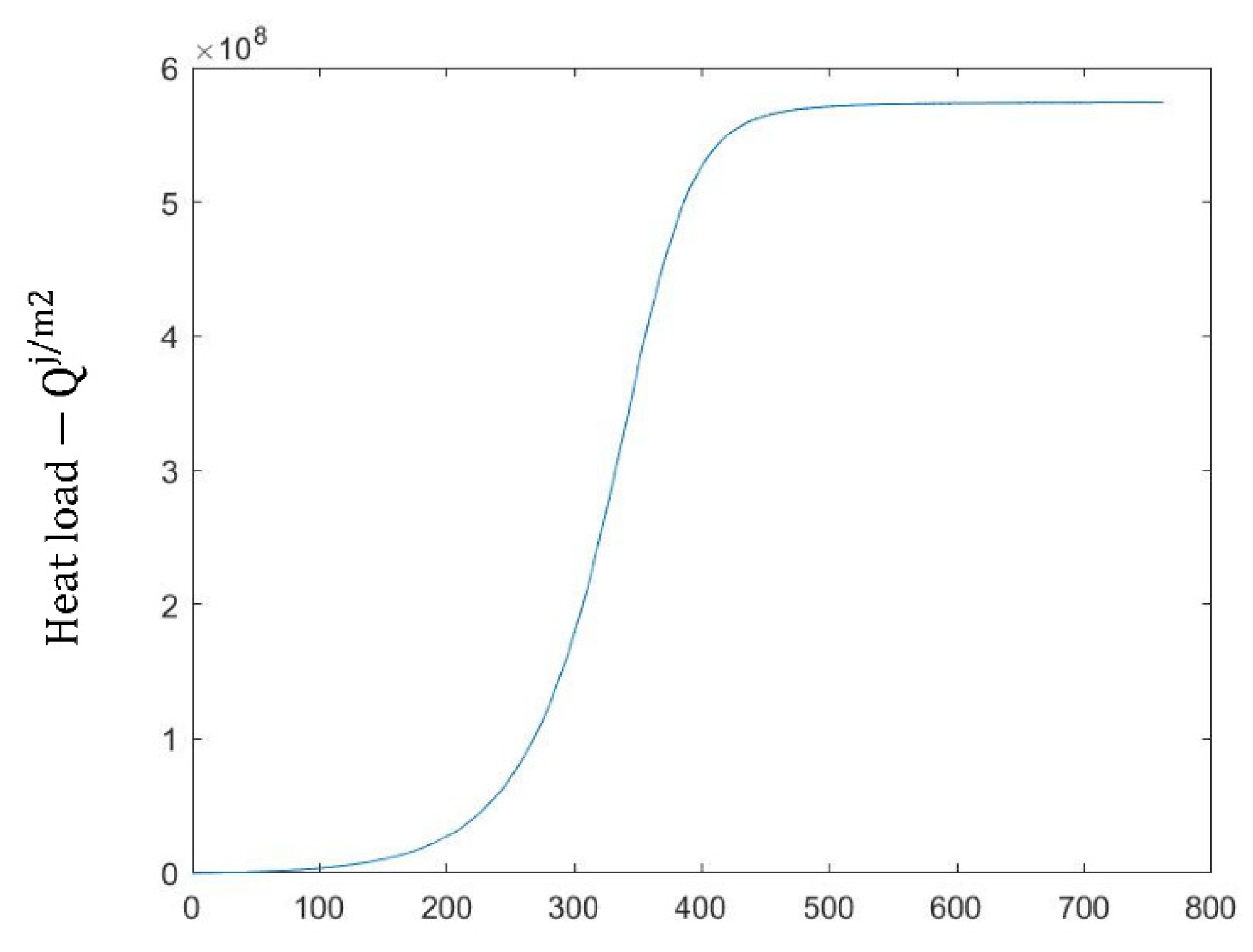
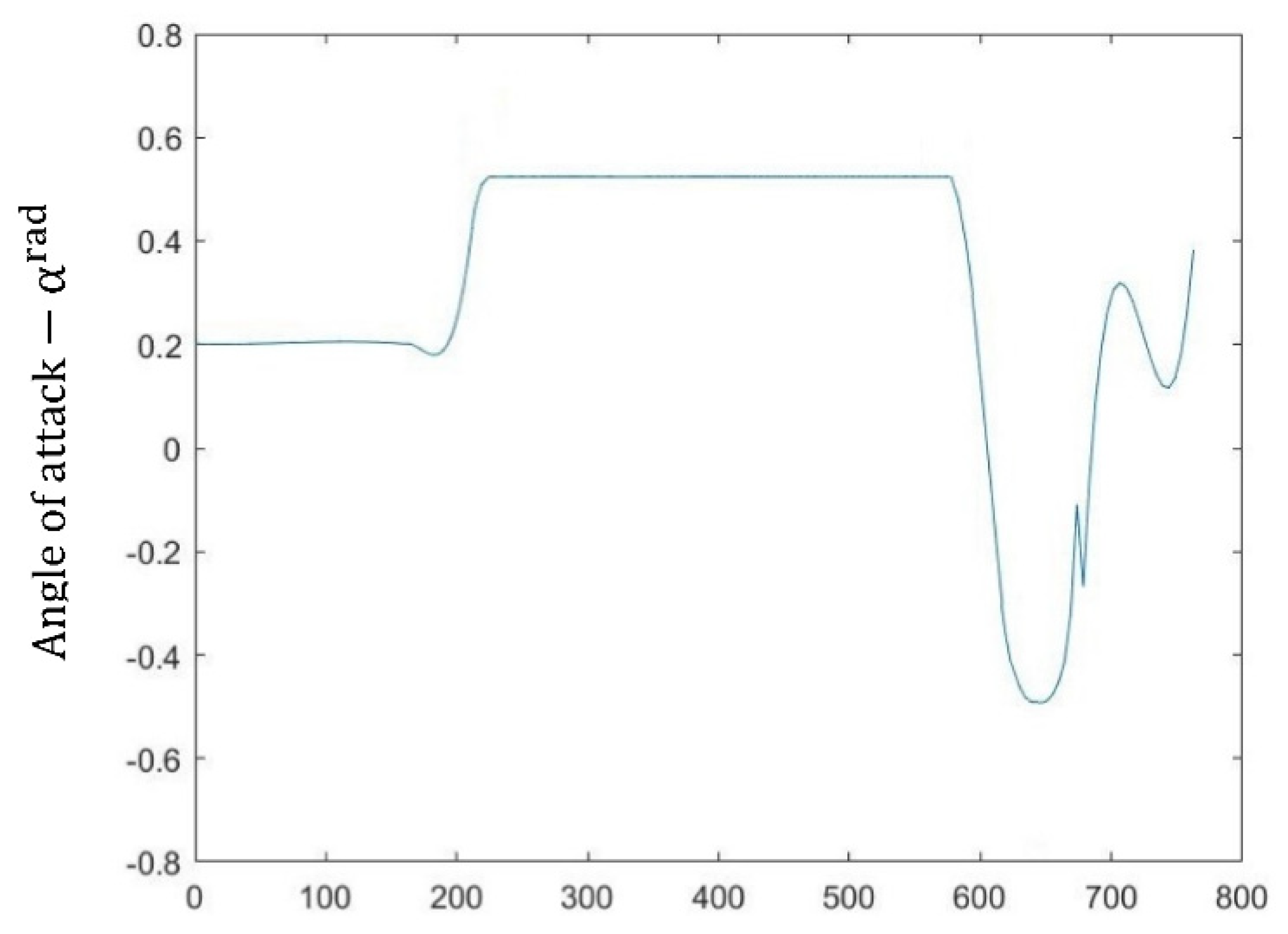
Figure 11, Figure 12 and Figure 13 show variations of state variables (altitude, latitude, and velocity, respectively) vs. time. Comparing Figure 11 to the existing Apollo re-entry data showed the validation of the code developed by the authors where the optimal solution is achieved while all the optimality conditions are satisfied. Figure 14 shows heat load vs. time, and indicates that it does not exceed the heat load constraint. Figure 15 shows the control variable (angle of attack) variation vs. time, to generate this trajectory. As can be observed from these figures, the presented method exhibits a reasonable performance in solving such problems.
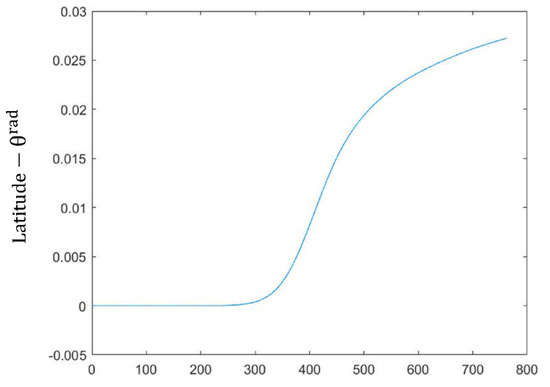
Figure 12.
Latitude vs. time .
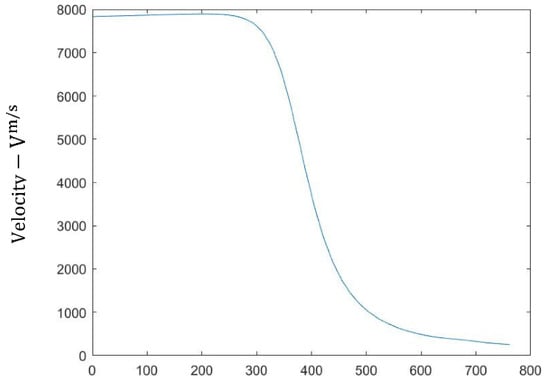
Figure 13.
Velocity vs. time .
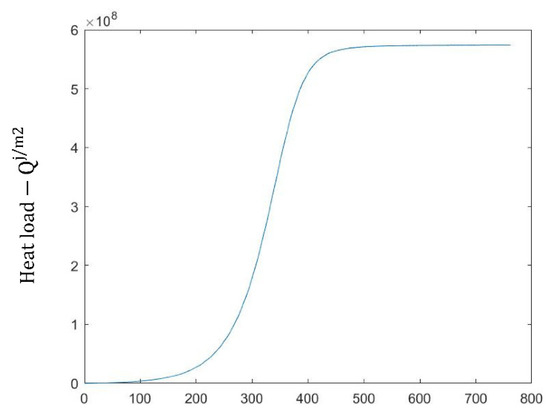
Figure 14.
Stagnation point heat load vs. time .
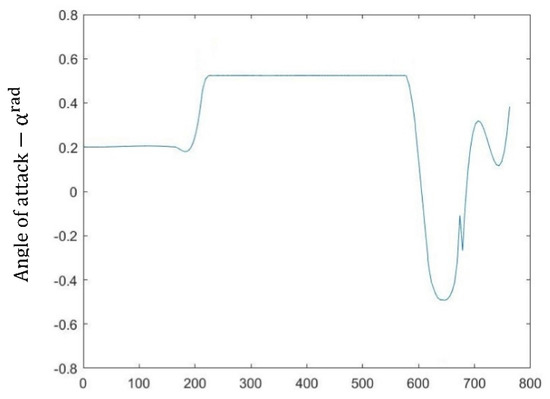
Figure 15.
Angle of attack vs. time .
5. Conclusions
In this paper, the shape optimization of a capsule re-entry spacecraft was reexamined. The problem statement was to minimize the mass on a re-entry spacecraft by changing the shape and the flight path parameters, while satisfying constraints, including critical heat flux, load factor, stability requirements, the flight path, and the shape at the given payload, initial and final flight conditions. A combined and innovative MDO based on the Radau pseudospectral method (RPM), including the key subsystems in the process, is presented. Considering variables, constraints, and various parameters applied through several geometric shapes in the conceptual design phase, the optimized dimensions for a re-entry spacecraft are presented. Considering a vehicle with the same area of Apollo, a 17% mass saving was achieved. In this method, fast computing and simplified models are used together to analyze a wide range of vehicle shapes and entry types during conceptual design.
In the future, other factors such as corner radius, affecting the shape design, and others not included in the present study, can be considered to establish a more accurate geometry of the shape model. Moreover, improved aerodynamic and aerothermodynamic models can be developed to enhance the performance of the optimal solution.
Author Contributions
This paper presents the results of recent research conducted by the first author (M.K.) under the supervision of the second author (S.M.H.) and with advisory help from the third author (J.R.). All authors have read and agreed to the published version of the manuscript.
Funding
The completion of this research was partially supported by a Discovery Grant from the Natural Sciences and Engineering Research Council of Canada (NSERC), RGPIN-2017-06868.
Data Availability Statement
All data generated or analyzed during this study are included within the article.
Acknowledgments
Support provided by the National Sciences and Engineering Research Council of Canada (NSERC), and Toronto Metropolitan University (formerly Ryerson University) is acknowledged.
Conflicts of Interest
The authors declare that there is no conflict of interest regarding the publication of this paper.
References
- Sellers, J.J. Returning from Space: Re-Entry. Understanding Space: An Introduction to Astronautics. 2000. Available online: https://www.faa.gov/sites/faa.gov/files/about/office_org/headquarters_offices/avs/III.4.1.7_Returning_from_Space.pdf (accessed on 16 August 2022).
- Tava, M.; Suzuki, S. Multidisciplinary design optimization of the shape and trajectory of a reentry vehicle. Trans. Jpn. Soc. Aeronaut. Space Sci. 2002, 45, 10–19. [Google Scholar] [CrossRef]
- Mor, M.; Livne, E. Integrated aeroelastic shape optimization of flight vehicles. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005. Collection of Technical Papers. [Google Scholar]
- Nosratollahi, M.; Mortazavi, M.; Adami, A.; Hosseini, M. Multidisciplinary design optimization of a reentry vehicle using genetic algorithm. Aircr. Eng. Aerosp. Technol. 2010, 82, 194–203. [Google Scholar] [CrossRef]
- Nosratollahi, M.; Hosseini, M.; Adami, A. Multidisciplinary Design Optimization of a Reentry Vehicle’s Configuration. In Proceedings of the 8th Aerospace International conference, Isfahan, Iran, 17–19 February 2009. [Google Scholar]
- Adami, A.; Hosseini, M.; Nosratollahi, M. Multiobjective Optimization of a Reentry Vehicle’s Aerodynamic Shape. In Proceedings of the 17th Mechanic International conference, Tehran, Iran, 19–21 May 2009. [Google Scholar]
- Nosratollahi, M.; Hosseini, M.; Adami, A. Multidisciplinary design optimization of a controllable reentry capsule for minimum landing velocity. In Proceedings of the 51st Collection of Technical Papers—AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Orlando, FL, USA, 12–15 April 2010. [Google Scholar]
- Adami, A.; Nosratollahi, M.; Mortazavi, M.; Hosseini, M. Multidisciplinary design optimization of a manned reentry mission considering trajectory and aerodynamic configuration. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies–RAST 2011, Istanbul, Turkey, 9–11 June 2011. [Google Scholar]
- Dirkx, D.; Mooij, E. Conceptual Shape Optimization of Entry Vehicles: Applied to Capsules and Winged Fuselage Vehicles; Springer Aerospace Technology; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Wu, Y.; Deng, J.; Li, L.; Su, X.; Lin, L. A hybrid particle swarm optimization-gauss pseudo method for reentry trajectory optimization of hypersonic vehicle with navigation information model. Aerosp. Sci. Technol. 2021, 118, 107046. [Google Scholar] [CrossRef]
- Hulme, K.F.; Bloebaum, C.L. A comparison of solution strategies for simulation-based multidisciplinary design optimization. In Proceedings of the 7th AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, St. Louis, MO, USA, 2–4 September 1998. [Google Scholar]
- Cramer, E.J.; Dennis, J.E., Jr.; Frank, P.D.; Lewis, R.M.; Shubin, G.R. Problem Formulation for Multidisciplinary Optimization. SIAM J. Optim. 1994, 4, 754–776. [Google Scholar] [CrossRef]
- Kabganian, M.; Roshanian, J.; Ebrahimi, M. Multidisciplinary Design Optimization of a Reentry Spacecraft. Master’s Thesis, K.N. Toosi University of Technology, Tehran, Iran, 2018. [Google Scholar]
- Rao, A.V.; Darby, C.L.; Patterson, M. User’s Manual for GPOPS Version 3.3: A MATLAB Software for Solving Optimal Control Problems Using Pseudospectral Methods. ACM Trans. Math. Softw. 2010, 37, 22–39. [Google Scholar] [CrossRef]
- Garg, D.; Patterson, M.A.; Hager, W.W.; Rao, A.; Benson, D.A.; Huntington, G.T. An overview of three pseudospectral methods for the numerical solution of optimal control problems. Adv. Astronaut. Sci. 2010, in press. Available online: https://hal.archives-ouvertes.fr/hal-01615132/ (accessed on 30 June 2022).
- Hirschel, E.H.; Weiland, C. Selected Aerothermodynamic Design Problems of Hypersonic Flight Vehicles; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Tauqeer Ul Islam Rizvi, S.; Linshu, H.; Rahman, T. Optimal Trajectory Study of a Small Size Waverider and Wing-Body Reentry Vehicle at Suborbital Entry Speed of Approximately 4 km/s with Dynamic Pressure and Heat Rate Constraint. AUT J. Model. Simul. 2012, 44, 29–36. [Google Scholar]
- Cavallero, C.; Chiarelli, C.; Mareschi, V.; Davite, A.; Gallizio, F.; Minisci, E.; Sudars, M. Multi-disciplinary shape optimization of an entry capsule integrated with custom neural network approximation and multi-delity approach. In Proceedings of the Eurogen 2011 Conference, Capua, Italy, 14–16 September 2011. [Google Scholar]
- Weiland, C. Aerodynamic Data of Space Vehicles; Springer: Berlin/Heidelberg, Germany, 2014; ISBN 9783642541681. [Google Scholar]
- Dirkx, D.; Mooij, E. Optimization of entry-vehicle shapes during conceptual design. Acta Astronaut. 2014, 94, 198–214. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).