An Inverse Identification Procedure for the Evaluation of Equivalent Loading Conditions for Simplified Numerical Models in Abaqus


Abstract
:1. Introduction
- The classical identification problem consists of finding the model describing the system from given inputs, responses, and boundary conditions.
- The inverse identification problem consists of finding the inputs of the system, based on the given responses, boundary conditions and model of the system (the main concern of this work).
2. The Identification Program
2.1. Objective Function
2.2. The Levenberg–Marquardt Algorithm and the Lmfit Python Library
2.2.1. The Levenberg–Marquardt Algorithm
2.2.2. The Lmfit Python Library
- Although there is no intrinsic meaning, we must keep track of the order and meaning of the variables.
- If we change the variation of a variable, the objective function must be modified, which is a heavy work for more complex models.
- Variable boundaries or mathematical relationships between variables are difficult to enforce.
- Refer to variables directly by name without worrying about their order and meaning.
- Easily define limits as attributes of variables.
- Change the variation of variables without having to rewrite the objective function.
- Place algebraic constraints on variables.
2.3. Numerical Implementation
- Declaration of the parameters, including their names and values.
- Declaration of the loading conditions to be identified, including their names, initial values, ranges, and imposed variations.
- Declaration of arguments controlling the convergence of Levenberg–Marquardt iterations.
- The responses of the complete simulated model with the initial loading conditions, including their names, values, and weights (which is called a factor in the text file).
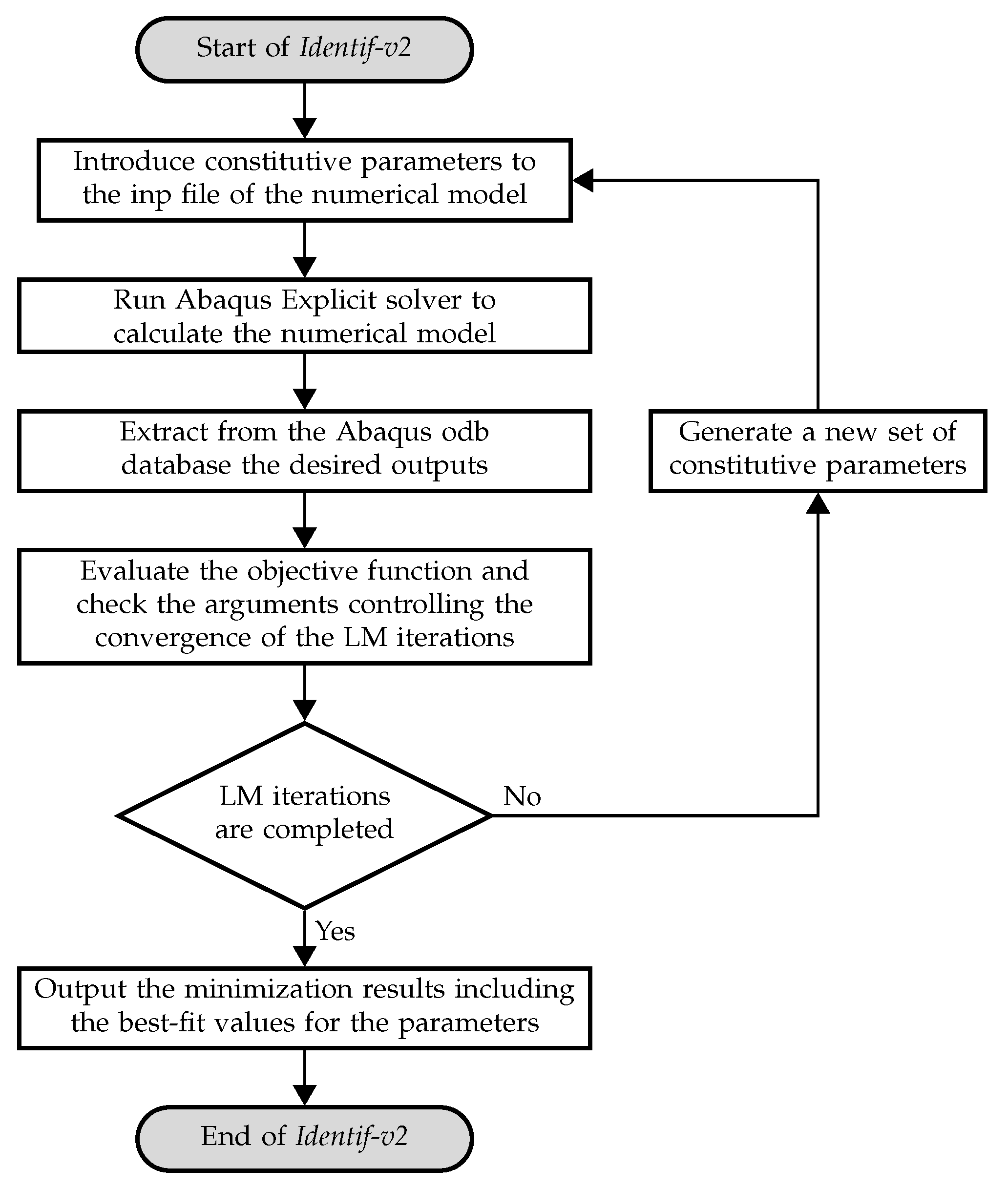
- Pass one set of loading conditions to the simplified model’s .inp Abaqus file.
- Run the Abaqus Explicit solver to simulate the simplified model.
- Extract the desired outputs from the Abaqus .odb database.
- Evaluate the objective function and check the arguments controlling the convergence of the LM iterations.
- If the LM iterations are complete, display the minimization results, including the best-fit values for the parameters, and terminate the identification program. If the last LM iterations are not completed, generate a new set of parameters and return to step #1.
3. Data Extracting and Processing
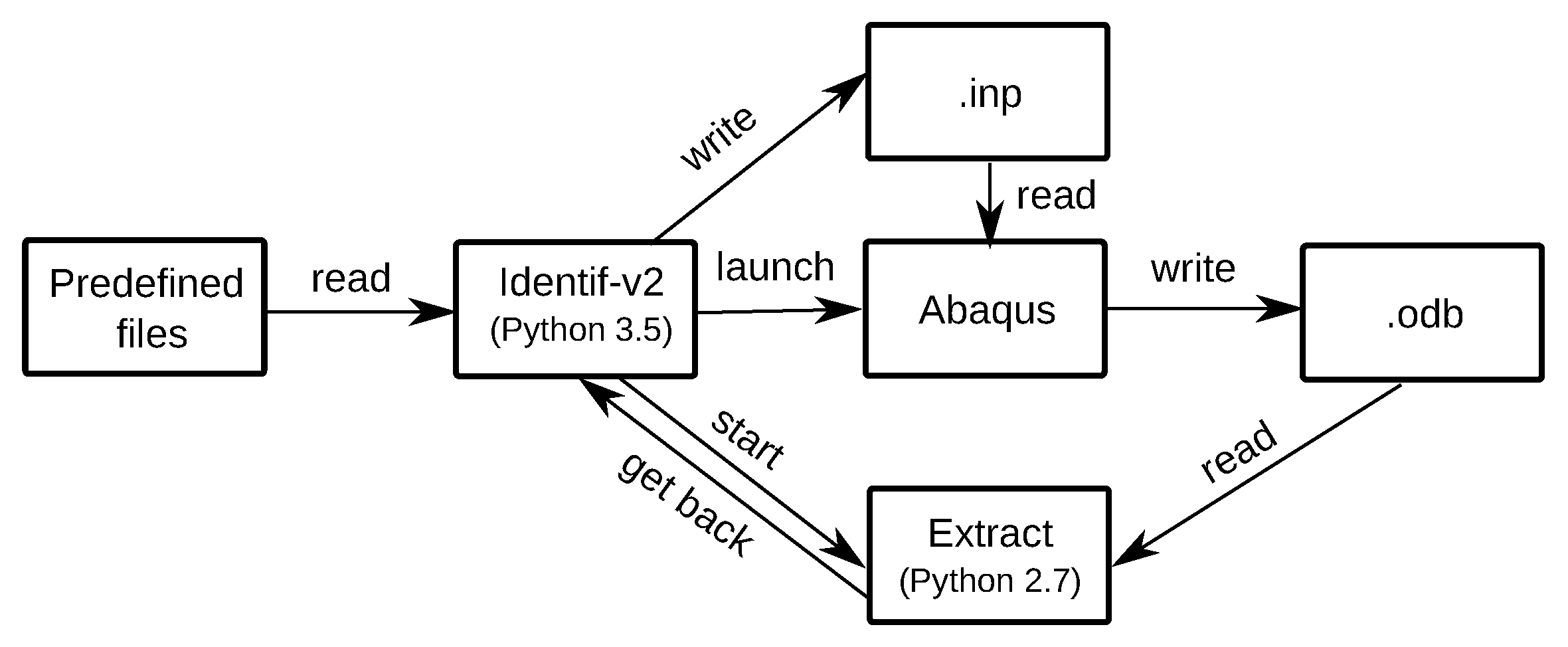
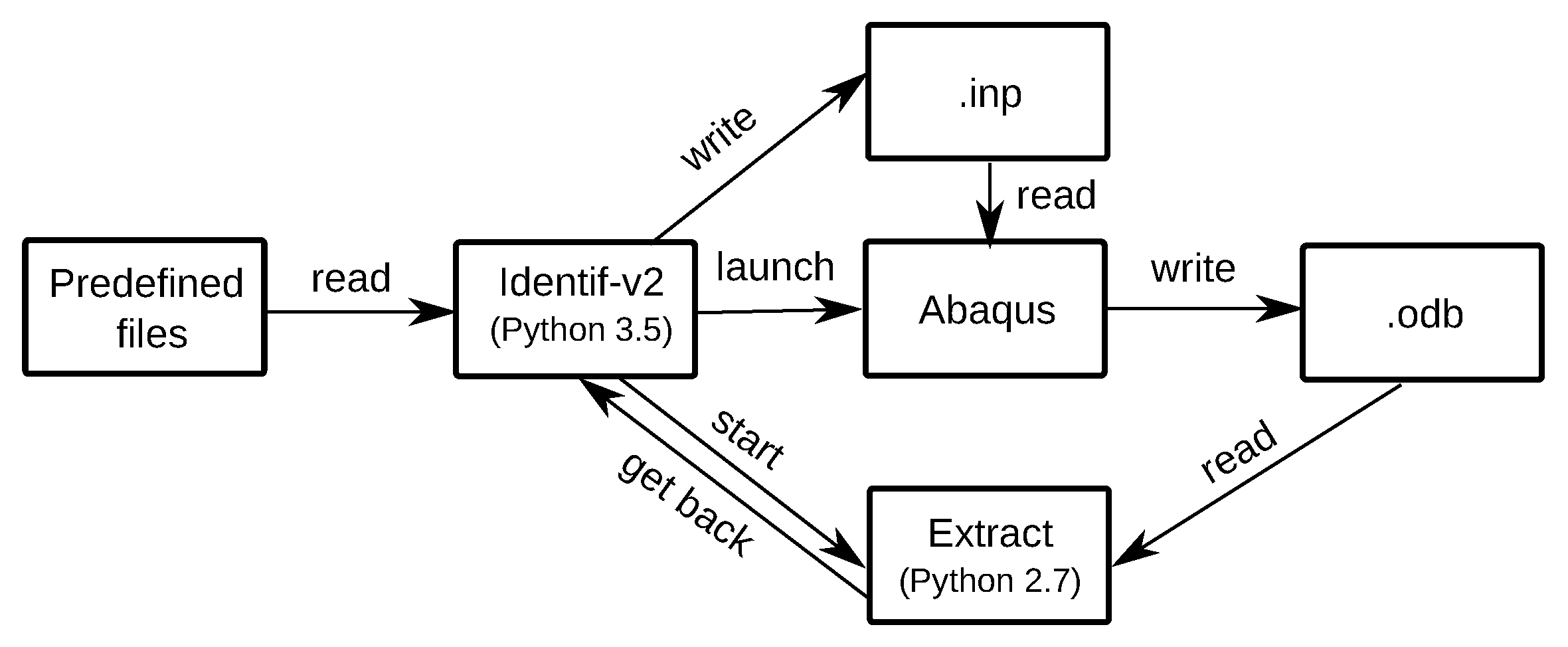
- The first is to extract these numerical responses from the output database file (.odb) generated by Abaqus Explicit. As the identification program is a repeated testing process, it generates a large amount of numerical responses. The work of extracting the data cannot rely on a manual operation. Instead, the required data must be extracted automatically from the file .odb. Thus, a data extraction program called Extract is proposed. The implementation of the extractor is performed in a different script file from the main program, Identif-v2, because the identification program is written in Python3, while the Extract program is written in Python2 (Abaqus only accepts Python2 script files, and we have to explore the Abaqus .odb database).
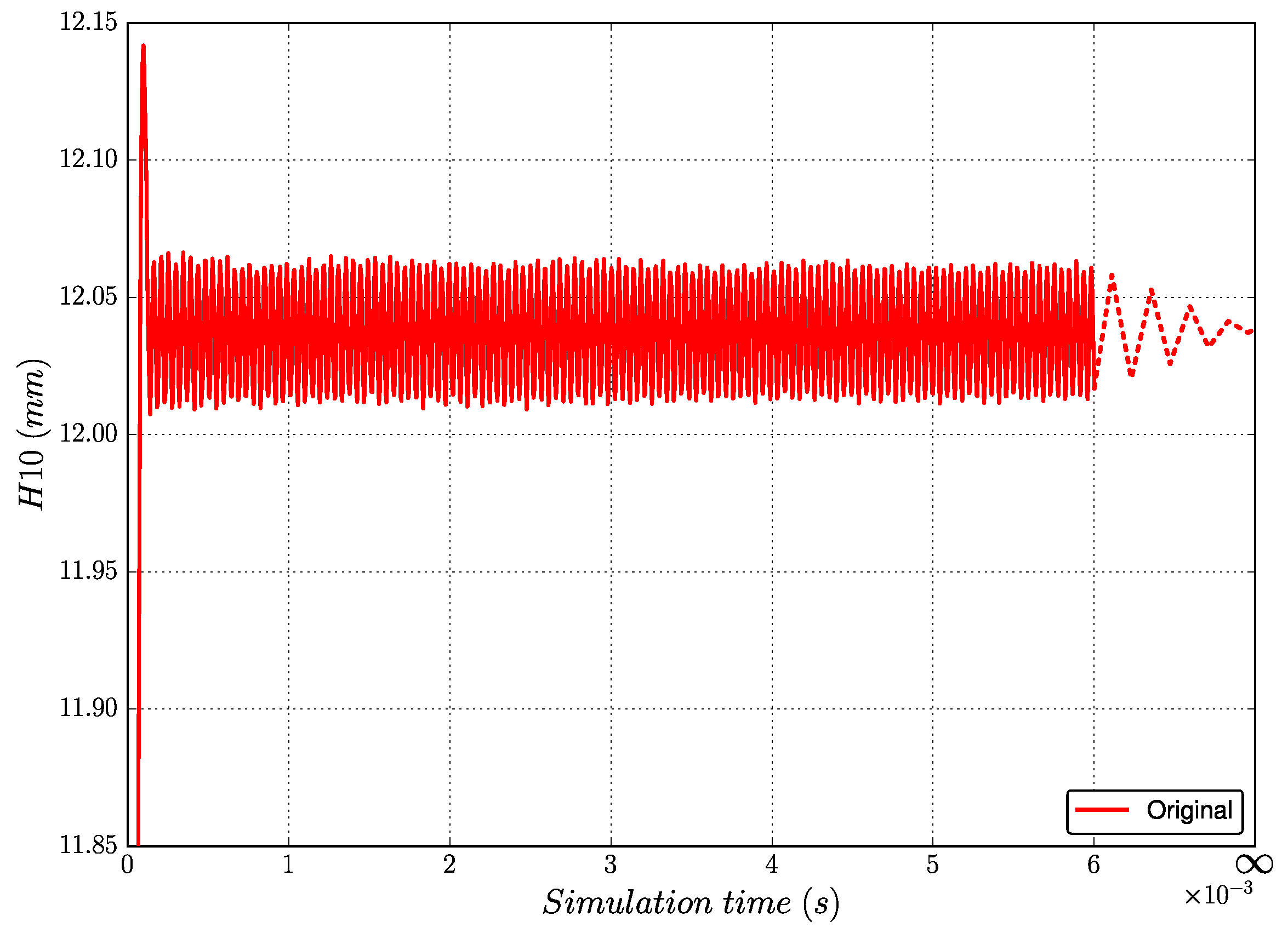
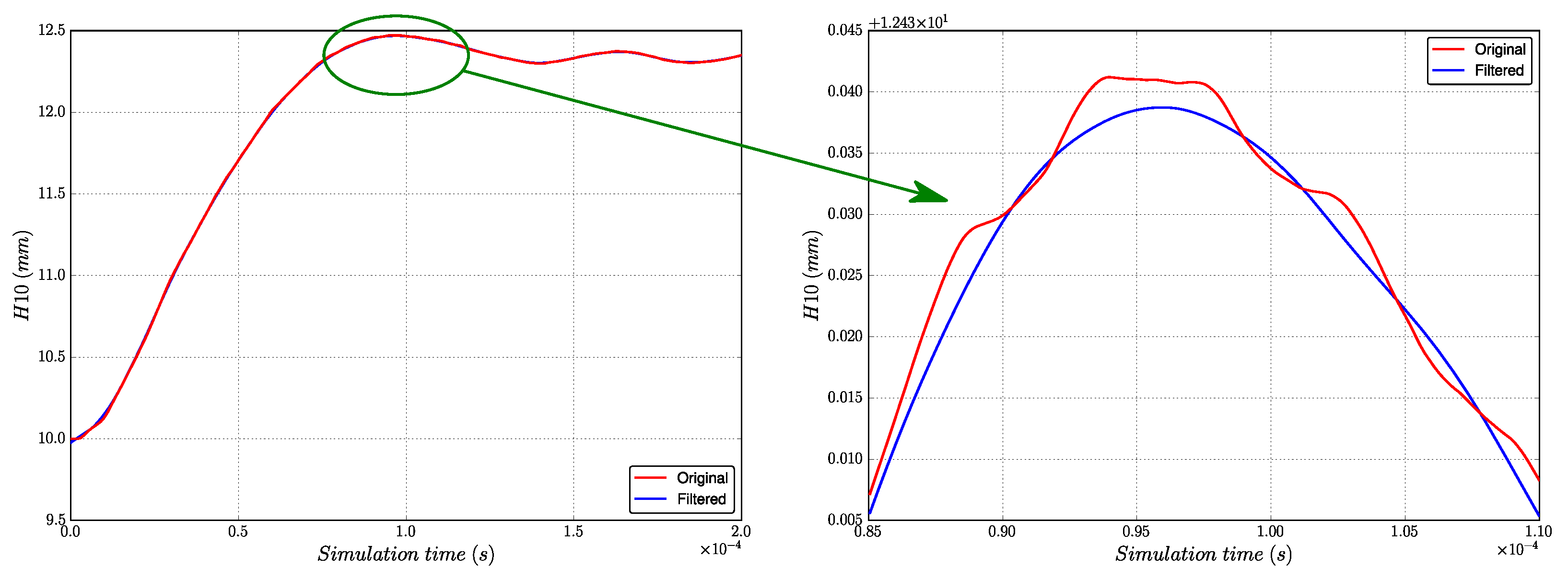
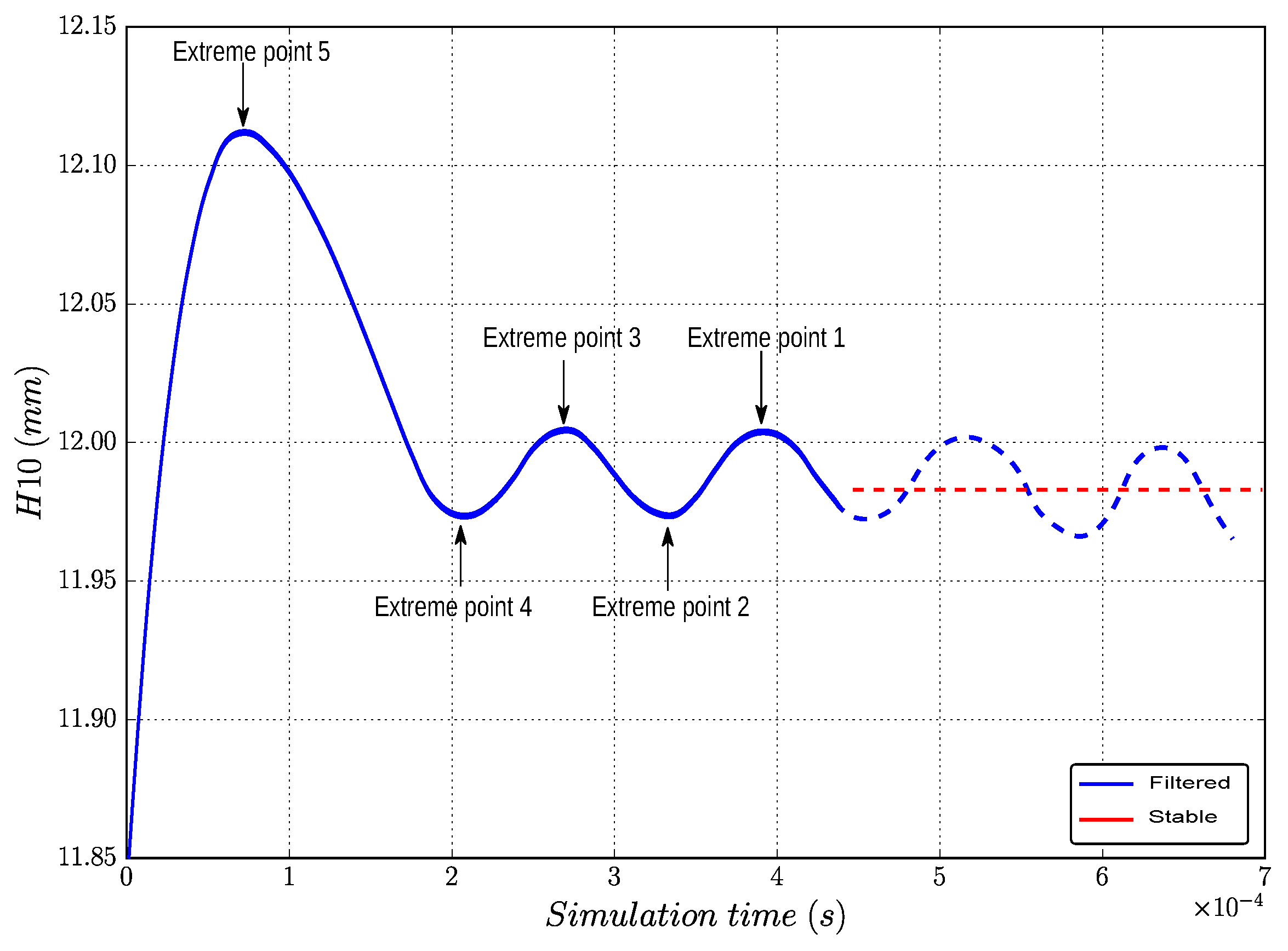
- The second question is how to achieve accurate numerical answers in a short computation time. We found that the responses extracted from the .odb file are not constant but oscillate in time (due to elastic waves inside the specimens). If we want to obtain stable responses, we have to spend a lot of time in the simulation (after having introduced an artificial damping to absorb these elastic waves). As one of our goals is to improve the efficiency of the identification program, long simulations should be avoided. To obtain the approximation of stable responses in a short simulation time, a data estimation method has been developed and implemented in the program Identify-v2.
3.1. Data Extraction from .odb Files
3.2. Data Estimation
3.2.1. Data with High Frequency Oscillations
3.2.2. Data with High Frequency Oscillations
3.3. Validation of the Data Estimation Method
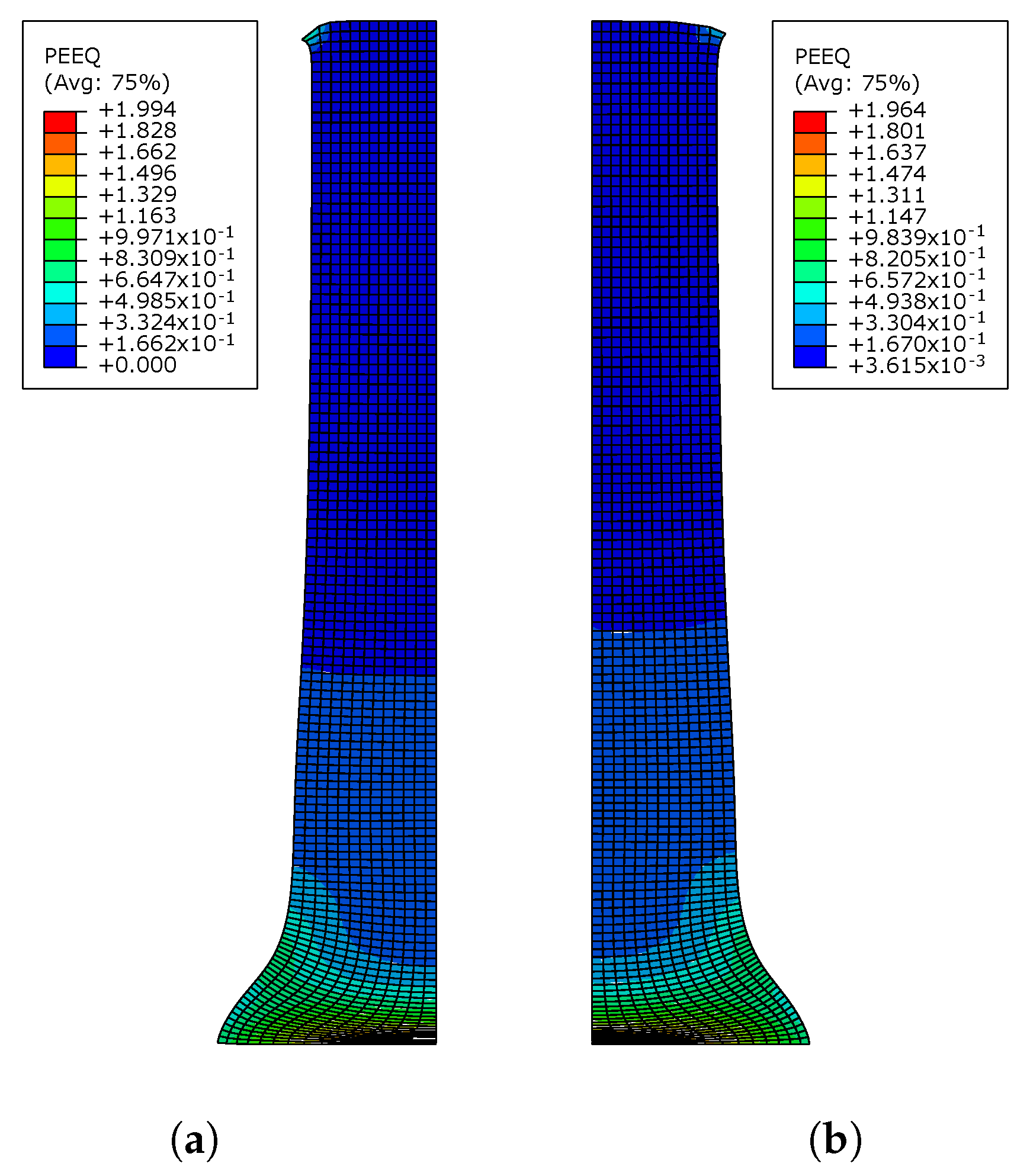
- The first value s is considered long enough to obtain stable responses of the geometrical parameters. The simulation process in this case takes about 5 hours of computation.
- The second value µs is used to obtain geometric responses in a short computation time which is less than 1 minute of simulation, although these geometric responses are not stabilized at the end of the computation as seen earlier.
4. Applications of the Inverse Identification Procedure
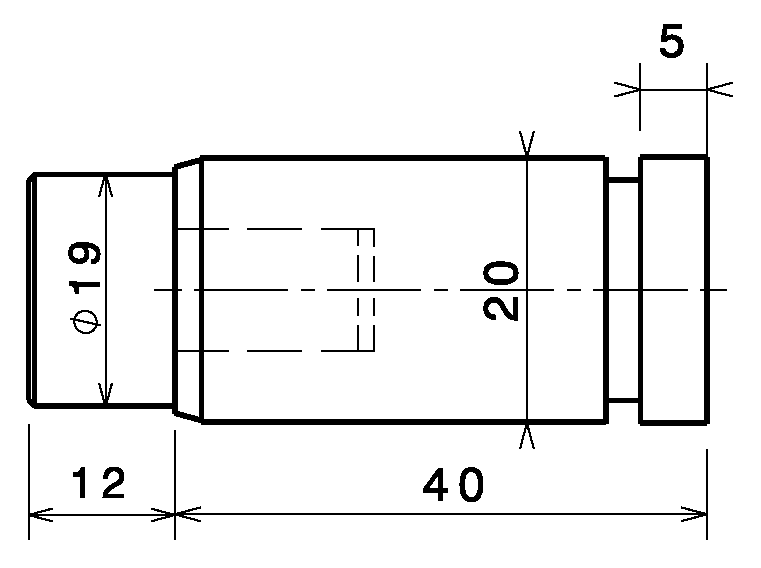
4.1. Simulation of the Taylor Test
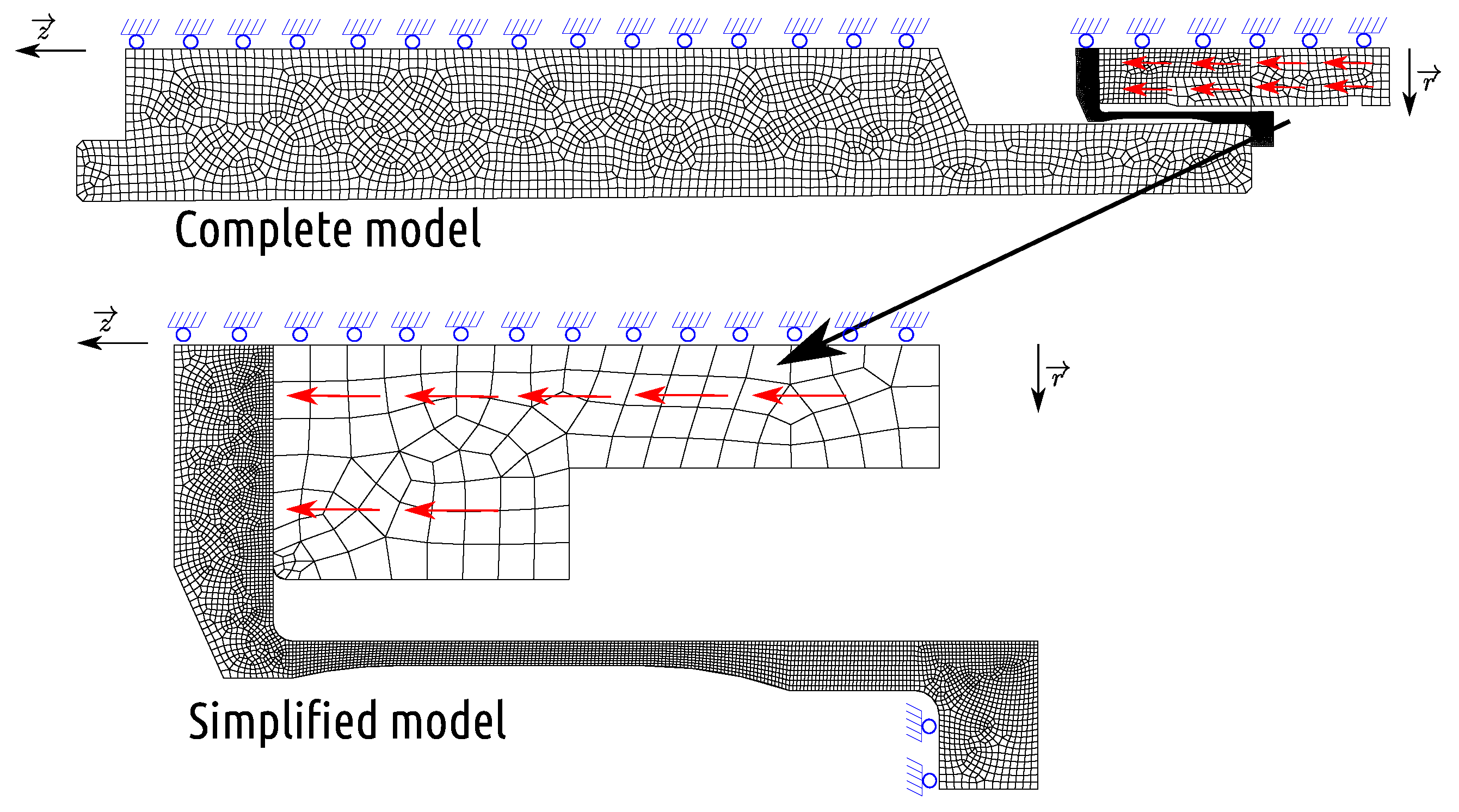
4.1.1. The Complete Model and Simplified Model
4.1.2. Equivalent Loading Conditions for the Taylor Test
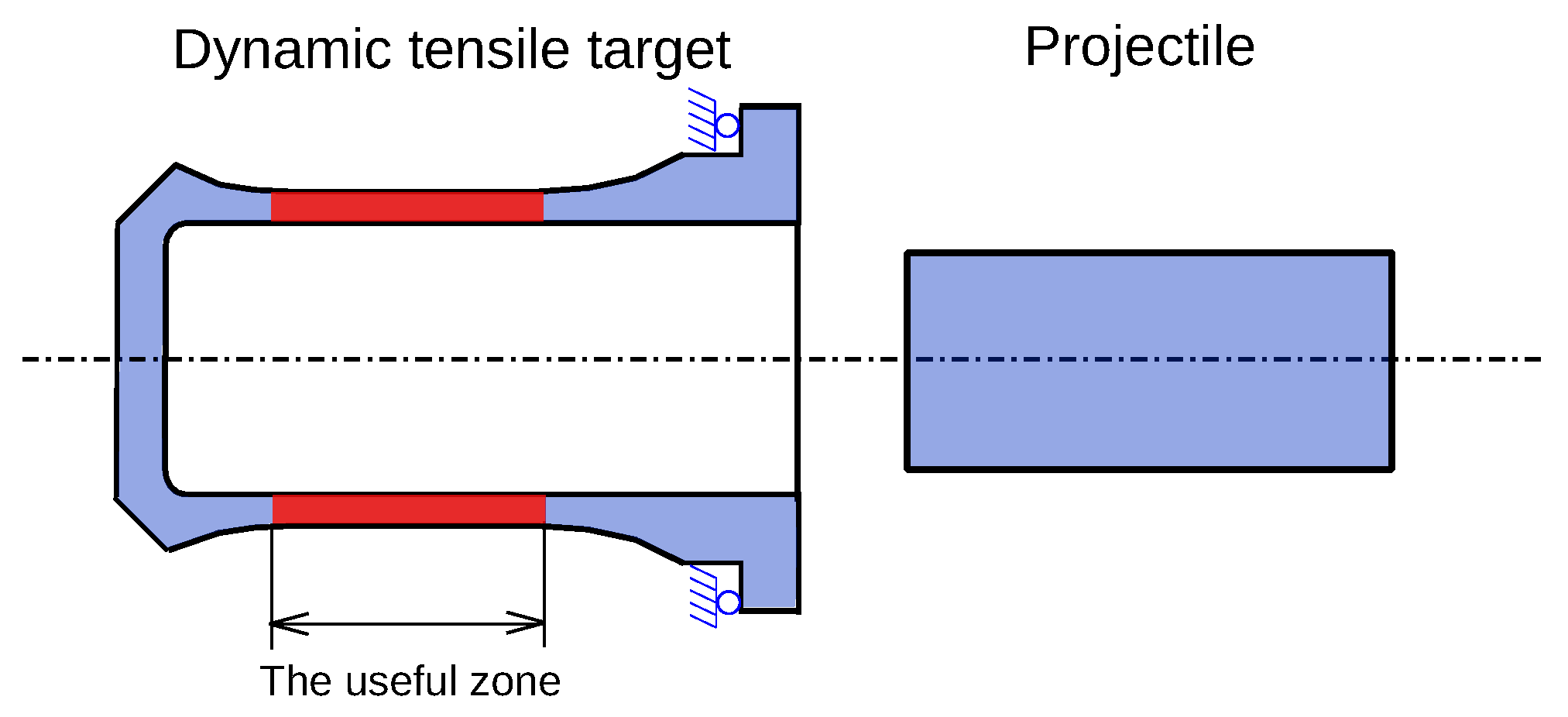
4.2. Simulation of the Dynamic Tensile Test
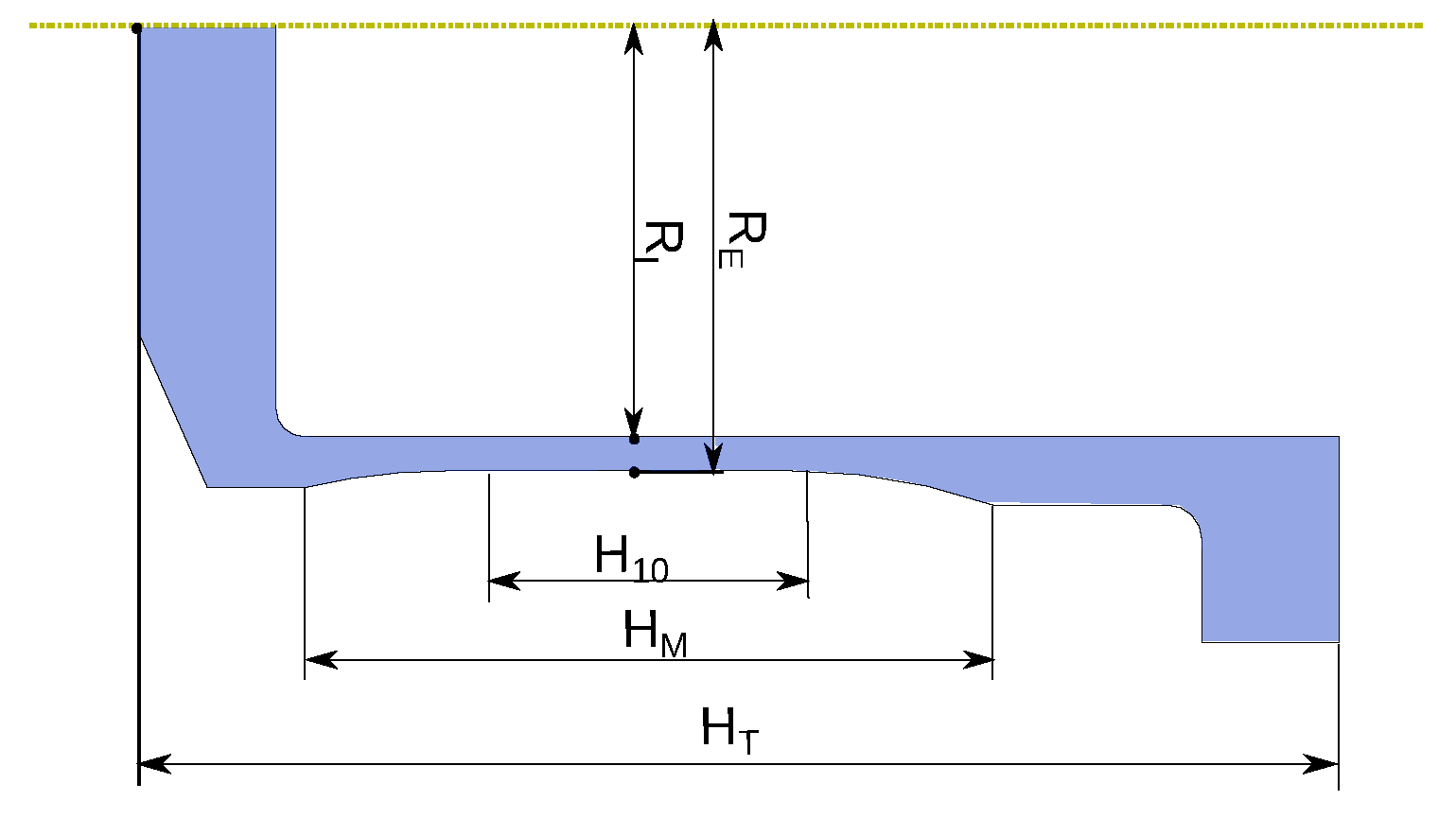
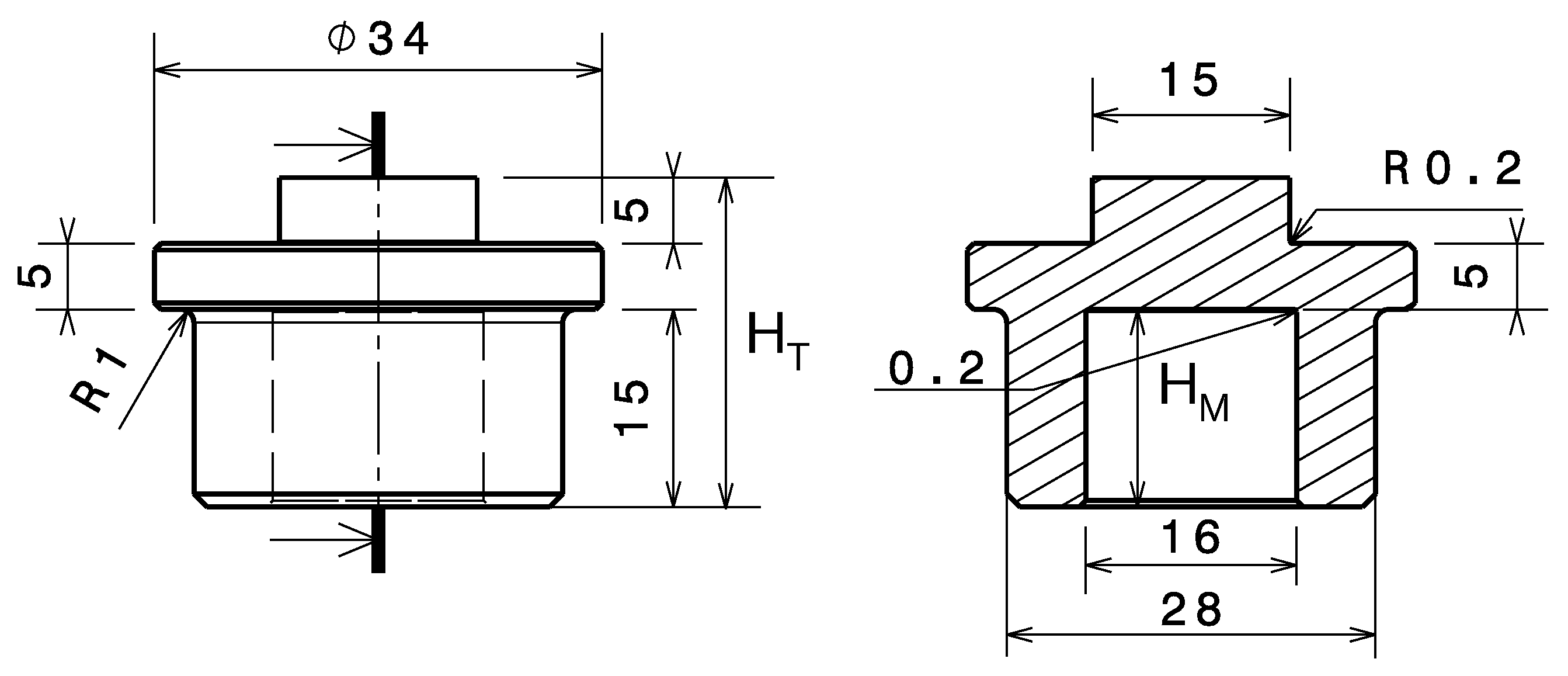
4.2.1. The Complete Model and Simplified Model
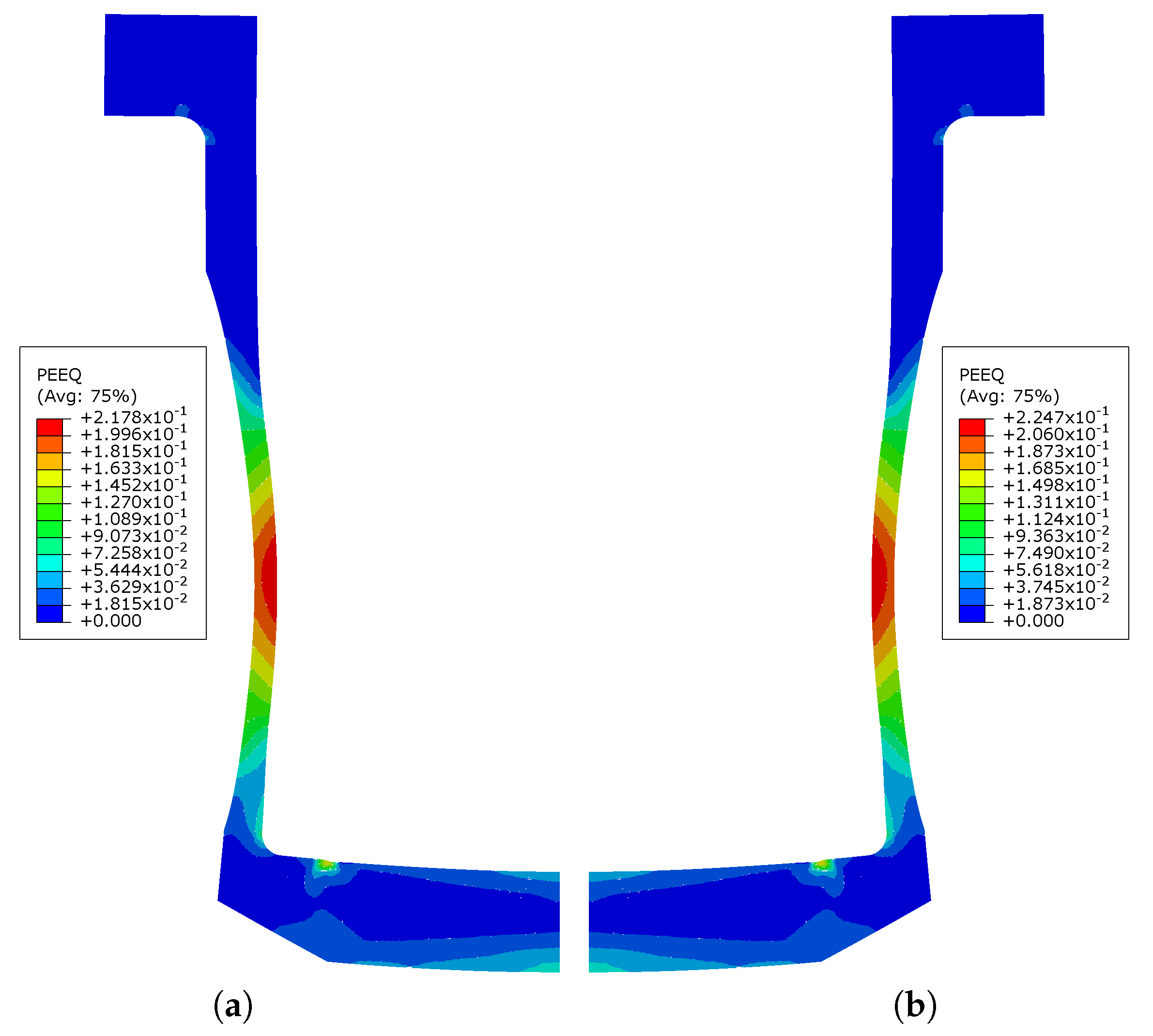
4.2.2. Equivalent Loading Conditions for the Dynamic Tensile Test
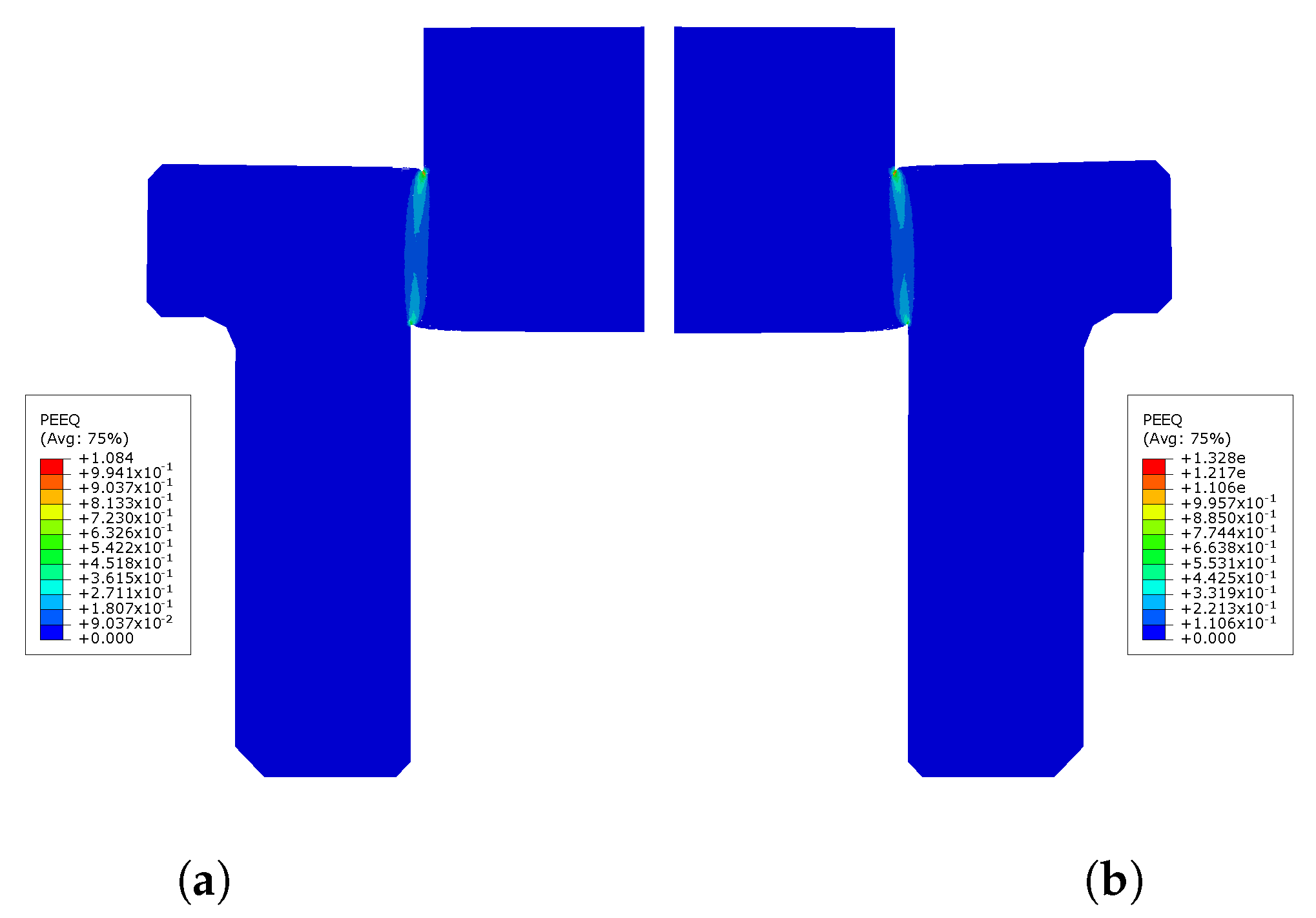
4.3. Simulation of the Dynamic Shear Test
4.3.1. The Complete Model and Simplified Model
4.3.2. Equivalent Loading Conditions for the Dynamic Tensile Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Uhl, T. The inverse identification problem and its technical application. Arch. Appl. Mech. 2007, 77, 325–337. [Google Scholar] [CrossRef]
- Hendriks, M.A.N. Identification of the Mechanical Behavior of Solid Materials; Technische Universiteit Eindhoven: Eindhoven, The Netherlands, 1991. [Google Scholar]
- Nistor, I.; Pantalé, O.; Caperaa, S.; Sattouf, C. Identification of a dynamic viscoplastic flow law using a combined levenberg-marquardt and monte-carlo algorithm. In Proceedings of the VII International Conference on Computational Plasticity, COMPLAS, Barcelona, Spain, 7–10 April 2003. [Google Scholar]
- Cooreman, S.; Lecompte, D.; Sol, H.; Vantomme, J.; Debruyne, D. Identification of mechanical material behavior through inverse modeling and DIC. Exp. Mech. 2008, 48, 421–433. [Google Scholar] [CrossRef]
- Furukawa, T.; Sugata, T.; Yoshimura, S.; Hoffman, M. An automated system for simulation and parameter identification of inelastic constitutive models. Comput. Methods Appl. Mech. Eng. 2002, 191, 2235–2260. [Google Scholar] [CrossRef]
- Nistor, I.; Pantalé, O.; Caperaa, S.; Sattouf, C. A new dynamic test for the identification of high speed friction law using a gas-gun device. J. Phys. IV (Proc.) 2003, 110, 519–524. [Google Scholar] [CrossRef]
- Nistor, I.; Pantalé, O.; Caperaa, S. A new impact test for the identification of a dynamic crack propagation criterion using a gas-gun device. J. Phys. IV (Proc.) 2006, 134, 713–718. [Google Scholar] [CrossRef] [Green Version]
- Sattouf, C. Caractérisation en Dynamique Rapide du Comportement de Matériaux Utilisés en Aéronautique. Ph.D. Thesis, INPT, Toulouse, France, 2003. [Google Scholar]
- Sattouf, C.; Pantalé, O.; Caperaa, S. A methodology for the identification of constitutive and contact laws of metallic materials under High Strain Rates. In Advances in Mechanical Behaviour, Plasticity and Damage; Elsevier: Tours, France, 2000; pp. 621–626. [Google Scholar]
- Abichou, H.; Pantalé, O.; Nistor, I.; Dalverny, O.; Caperaa, S. Identification of metallic material behaviors under high-velocity impact: A new tensile test. In Proceedings of the 15th Technical Meeting DYMAT, Metz, France, 1–2 June 2004; pp. 1–2. [Google Scholar]
- Gavrus, A.; Massoni, E.; Chenot, J. An inverse analysis using a finite element model for identification of rheological parameters. J. Mater. Processing Technol. 1996, 60, 447–454. [Google Scholar] [CrossRef]
- Lloyd, B.; Székely, G.; Harders, M. Identification of spring parameters for deformable object simulation. IEEE Trans. Vis. Comput. Graph. 2007, 13, 1081–1094. [Google Scholar] [CrossRef] [PubMed]
- Levenberg, K. A method for the solution of certain non-linear problems in least squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Marquardt, D. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Lourakis, M.I. A Brief Description of the Levenberg-Marquardt Algorithm Implemented by Levmar; Foundation of Research and Technology: Heraklion, Greece, 2005; Volume 4. [Google Scholar]
- Newville, M.; Stensitzki, T.; Allen, D.B.; Rawlik, M.; Ingargiola, A.; Nelson, A. LMFIT: Non-Linear Least-Square Minimization and Curve-Fitting for Python. Zenodo:10.5281/zenodo.5570790. 2021. Available online: https://ui.adsabs.harvard.edu/abs/2016ascl.soft06014N/abstract (accessed on 18 April 2022).
- Savitzky, A.; Golay, M.J. Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Guest, P.G. Numerical Methods of Curve Fitting; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Sattouf, C.; Dalverny, O.; Rakotomalala, R. Identification and comparison of different constitutive laws for high speed solicitation. J. Phys. IV (Proc.) 2003, 110, 201–206. [Google Scholar] [CrossRef]
- Dwivedi, A.; Bradley, J.; Casem, D. Mechanical Response of Polycarbonate with Strength Model Fits; Technical Report; Dynamic Science Inc.: Aberdeen, MD, USA, 2012. [Google Scholar]
- Taylor, G. The use of flat-ended projectiles for determining dynamic yield stress. I. Theoretical considerations. Proc. R. Soc. Lond. Math. Phys. Eng. Sci. R. Soc. 1948, 194, 289–299. [Google Scholar]
- Sarva, S.; Mulliken, A.D.; Boyce, M.C. Mechanics of Taylor impact testing of polycarbonate. Int. J. Solids Struct. 2007, 44, 2381–2400. [Google Scholar] [CrossRef] [Green Version]
- Ming, L. A Numerical Platform for the Identification of Dynamic Non-Linear Constitutive Laws Using Multiple Impact Tests: Application to Metal Forming and Machining. Ph.D. Thesis, INPT, Toulouse, France, 2018. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Response | Time | |||||
|---|---|---|---|---|---|---|
| (mm) | (mm) | (mm) | (mm) | (mm) | ||
| Stable | s | |||||
| s | ||||||
| 300 µs | ||||||
| 42CrMo4 | 2017-T3 | Polycarbonate | |
|---|---|---|---|
| E (Gpa) | |||
| A (MPa) | 806 | 360 | 80 |
| B (MPa) | 614 | 31 | 75 |
| C | |||
| n | 2 | ||
| m | |||
| (s) | 1 | 1 | 1 |
| (°C) | 20 | 20 | 20 |
| (°C) | 1540 | 513 | 289 |
| (kg/m) | 7830 | 2790 | 1220 |
| (W/m°C) | 134 | ||
| (J/kg°C) | 460 | 880 | 1200 |
| (mm) | (mm) | (mm) | (mm) | (mm) | ||
|---|---|---|---|---|---|---|
| C-M | ||||||
| S-M | ||||||
| Numerical | Velocity | ||||||
|---|---|---|---|---|---|---|---|
| Model | (m/s) | (mm) | (mm) | (mm) | (mm) | (mm) | |
| C-M | 30 | ||||||
| S-M () | 30 | ||||||
| () | |||||||
| S-M () | |||||||
| () | |||||||
| C-M | 90 | ||||||
| S-M () | 90 | ||||||
| () | |||||||
| S-M () | |||||||
| () | |||||||
| C-M | 120 | ||||||
| S-M () | 120 | ||||||
| () | |||||||
| S-M () | |||||||
| () | |||||||
| C-M | 180 | ||||||
| S-M () | 180 | ||||||
| () | |||||||
| S-M () | |||||||
| () | |||||||
| C-M | 240 | ||||||
| S-M () | 240 | ||||||
| () | |||||||
| S-M () | |||||||
| () |
| (mm) | (mm) | (mm) | (mm) | (mm) | ||
|---|---|---|---|---|---|---|
| C-M | ||||||
| S-M | ||||||
| Numerical | Velocity | ||||||
|---|---|---|---|---|---|---|---|
| Model | (m/s) | (mm) | (mm) | (mm) | (mm) | (mm) | |
| C-M | 60 | ||||||
| S-M () | 60 | ||||||
| () | |||||||
| S-M () | |||||||
| () | |||||||
| C-M | 65 | ||||||
| S-M () | 65 | ||||||
| () | |||||||
| S-M () | |||||||
| () | |||||||
| C-M | 70 | ||||||
| S-M () | 70 | ||||||
| () | |||||||
| S-M () | |||||||
| () | |||||||
| C-M | 75 | ||||||
| S-M () | 75 | ||||||
| () | |||||||
| S-M () | |||||||
| () |
| (mm) | (mm) | ||
|---|---|---|---|
| C-M | |||
| S-M | |||
| Numerical Model | Velocity | |||
|---|---|---|---|---|
| (m/s) | (mm) | (mm) | ||
| C-M | 25 | |||
| S-M () | 25 | |||
| () | ||||
| S-M () | ||||
| () | ||||
| C-M | 30 | |||
| S-M () | 30 | |||
| () | ||||
| S-M () | ||||
| () | ||||
| C-M | 35 | |||
| S-M () | 35 | |||
| () | ||||
| S-M () | ||||
| () | ||||
| C-M | 40 | |||
| S-M () | 40 | |||
| () | ||||
| S-M () | ||||
| () | ||||
| C-M | 45 | |||
| S-M () | 45 | |||
| () | ||||
| S-M () | ||||
| () |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pantalé, O.; Ming, L. An Inverse Identification Procedure for the Evaluation of Equivalent Loading Conditions for Simplified Numerical Models in Abaqus. Appl. Mech. 2022, 3, 663-682. https://doi.org/10.3390/applmech3020039
Pantalé O, Ming L. An Inverse Identification Procedure for the Evaluation of Equivalent Loading Conditions for Simplified Numerical Models in Abaqus. Applied Mechanics. 2022; 3(2):663-682. https://doi.org/10.3390/applmech3020039
Chicago/Turabian StylePantalé, Olivier, and Lu Ming. 2022. "An Inverse Identification Procedure for the Evaluation of Equivalent Loading Conditions for Simplified Numerical Models in Abaqus" Applied Mechanics 3, no. 2: 663-682. https://doi.org/10.3390/applmech3020039
APA StylePantalé, O., & Ming, L. (2022). An Inverse Identification Procedure for the Evaluation of Equivalent Loading Conditions for Simplified Numerical Models in Abaqus. Applied Mechanics, 3(2), 663-682. https://doi.org/10.3390/applmech3020039