
Innovative Smart Drilling with Critical Event Detection and Material Classification


Abstract
:1. Introduction
2. Analysis of the Transmission in Typical Actuation
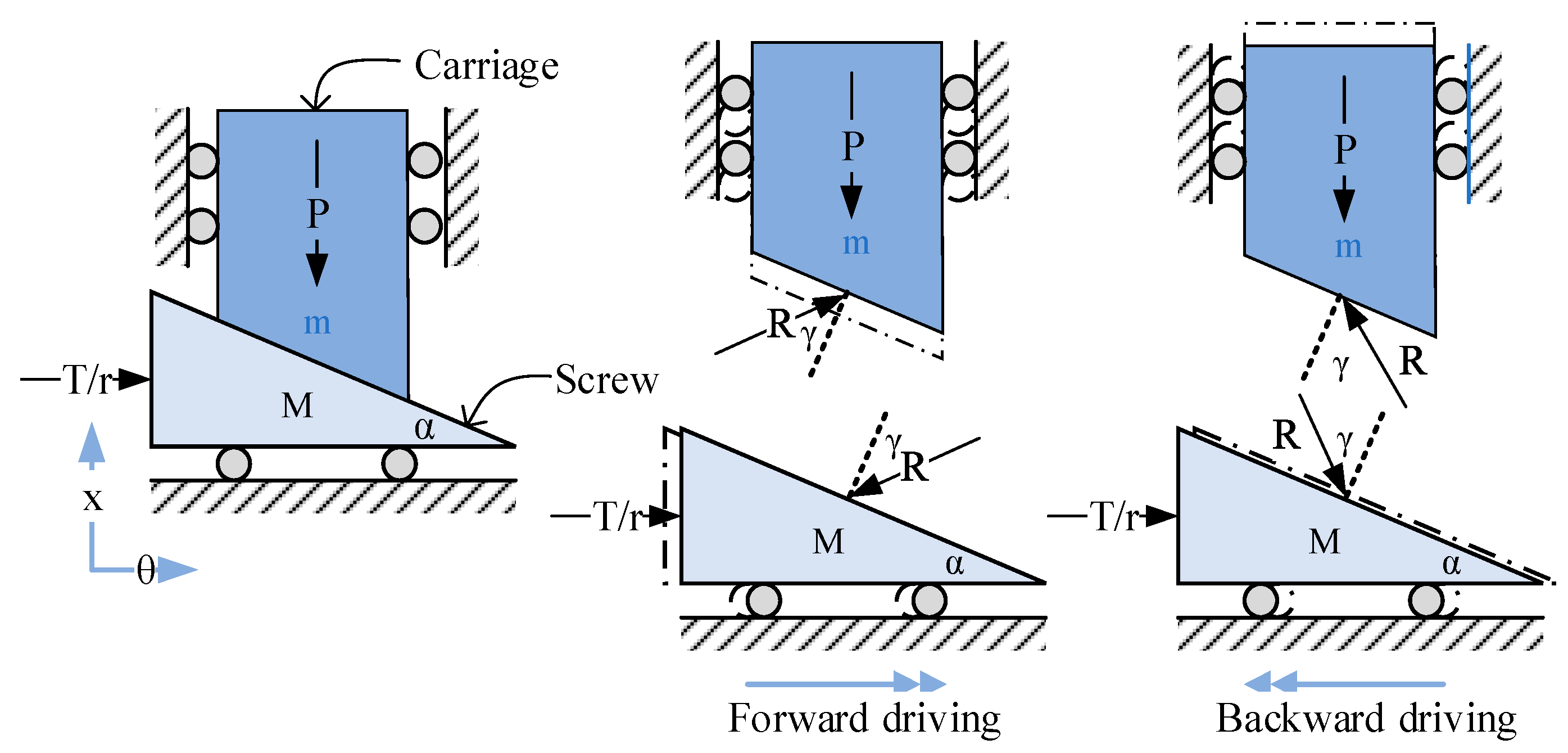
2.1. The Mechanism of a Lead Screw
2.2. The Visibility of a Lead Screw
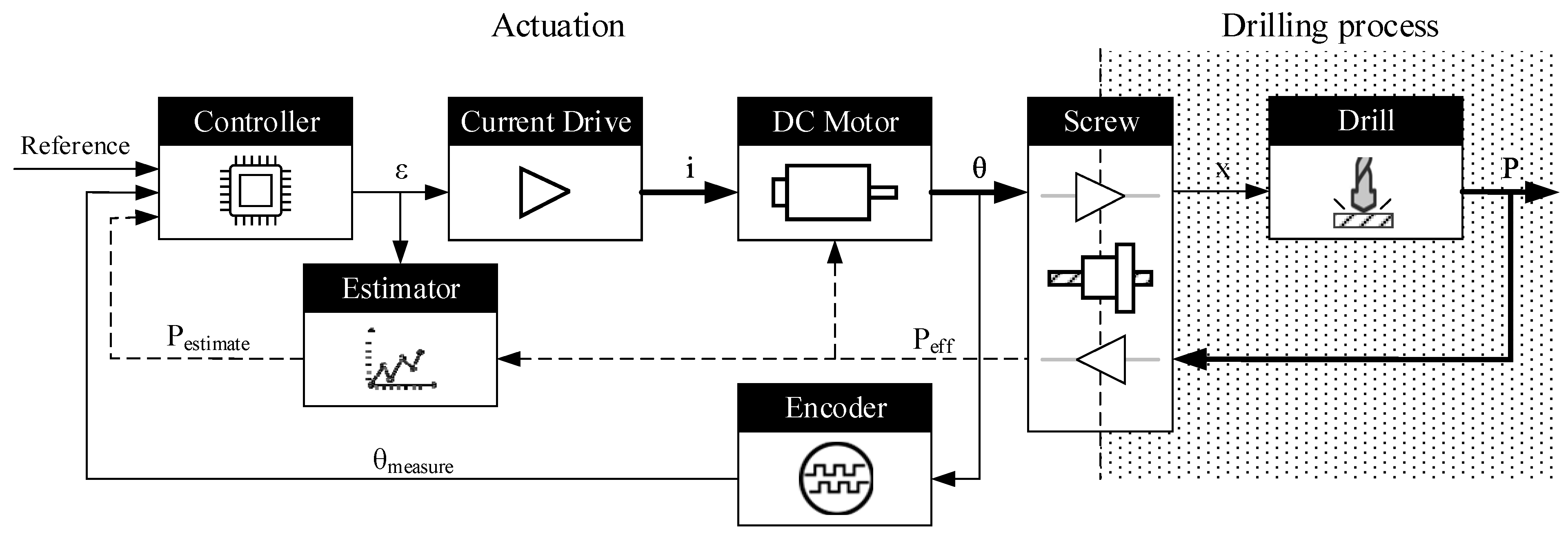
2.3. Effect of Lead Screw on a Feedback Controller
3. Design and Implementation
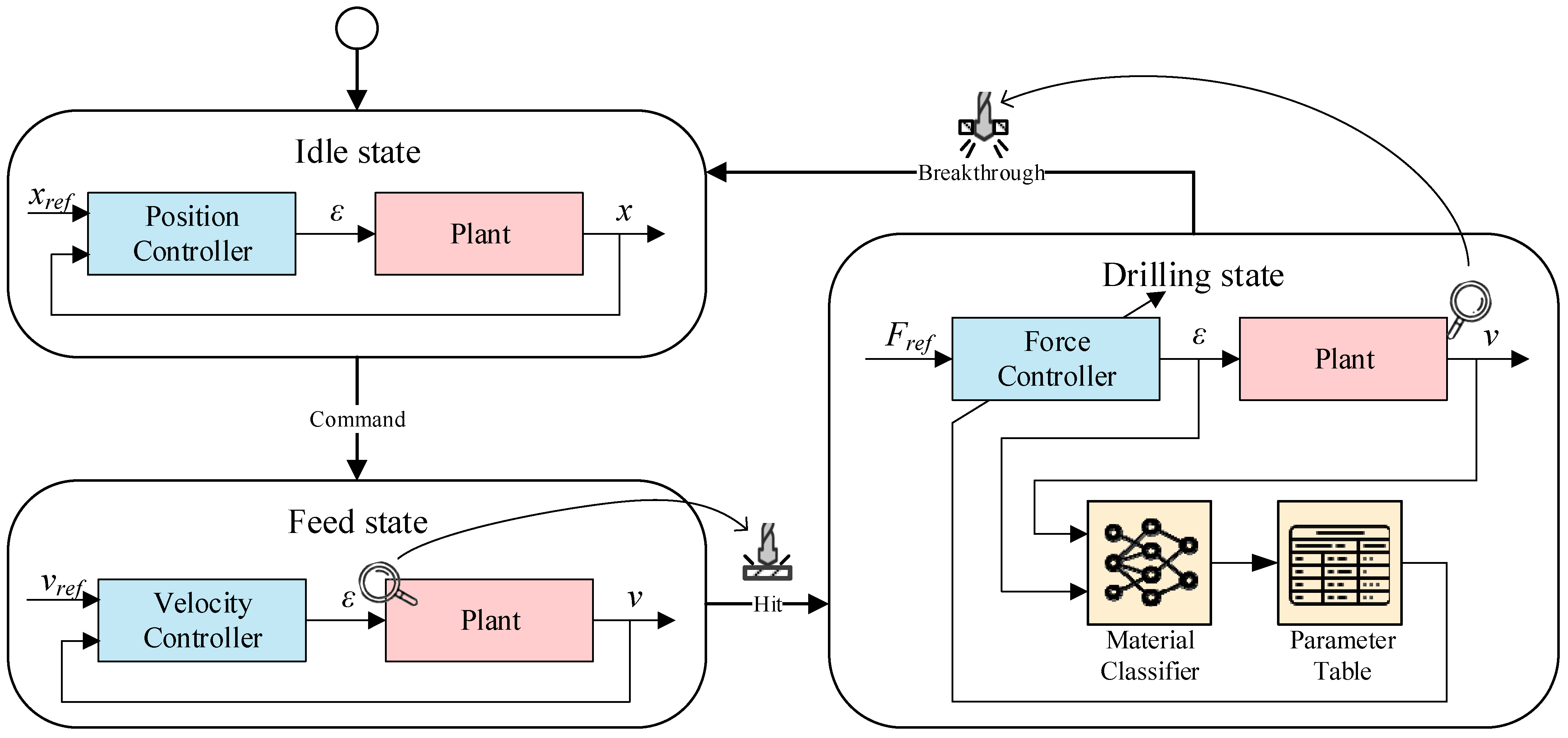
3.1. Conceptual Design
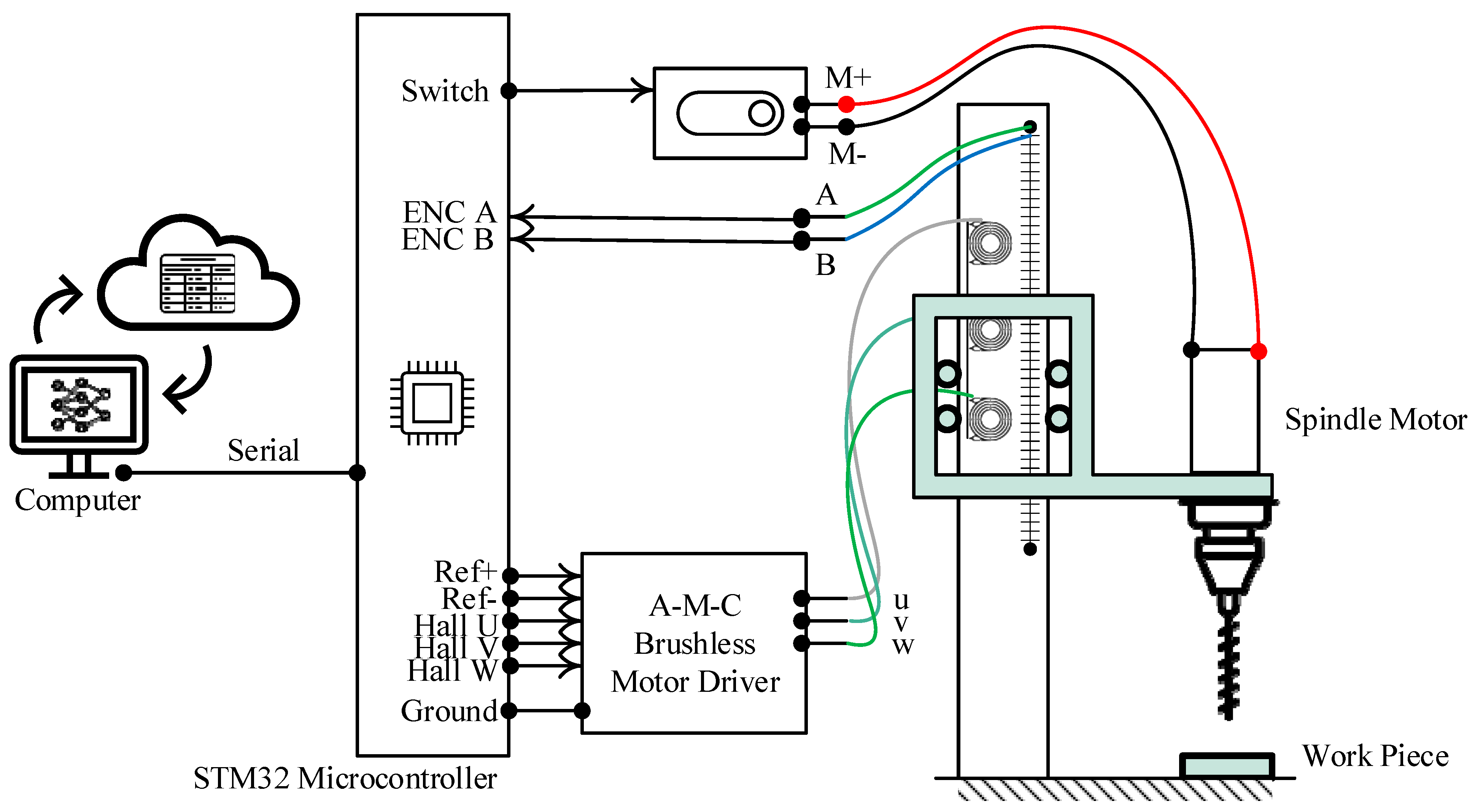
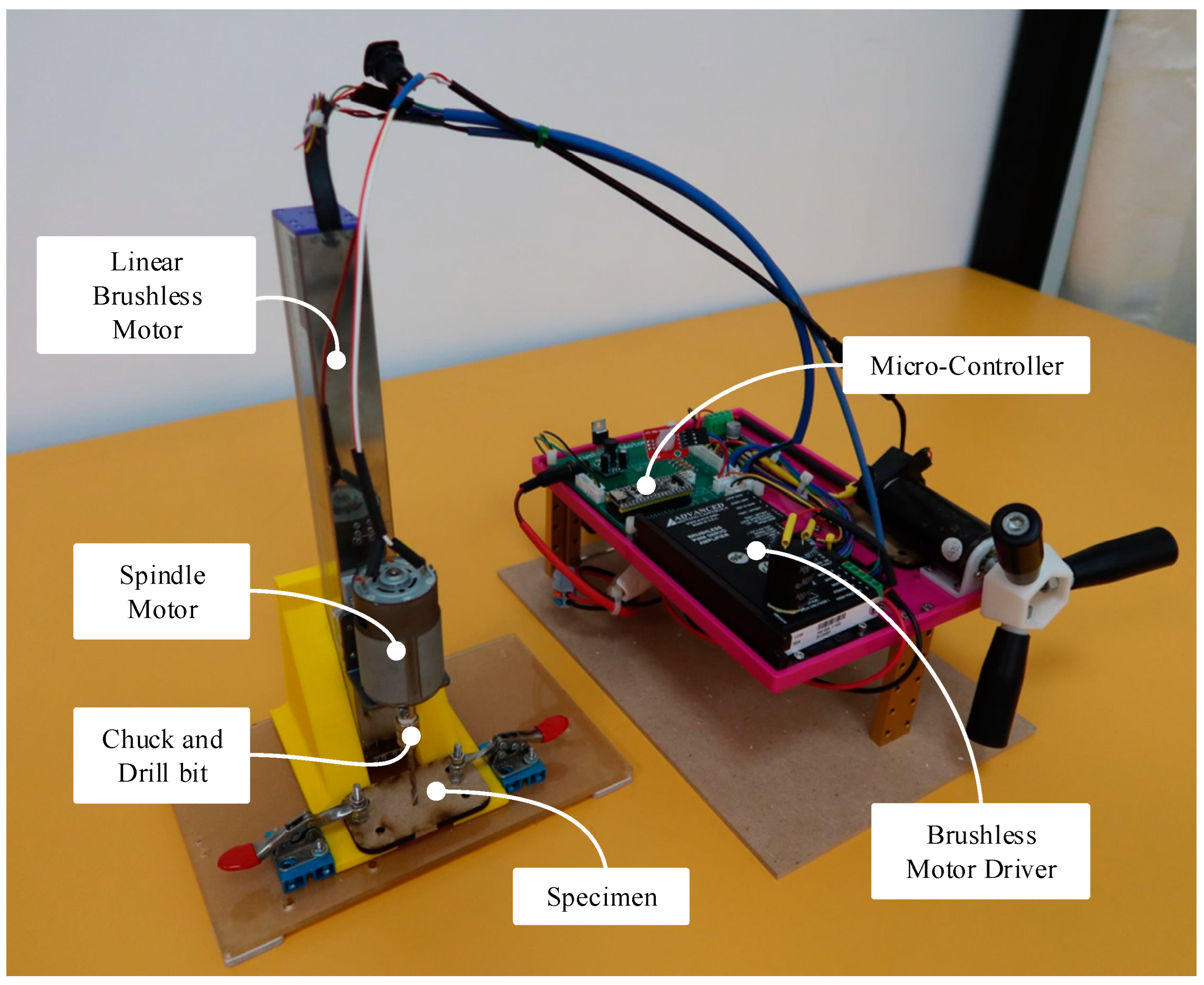
3.2. Hardware Implementation
3.3. Proposed Controller
4. Results and Discussion
4.1. Experimental Setup
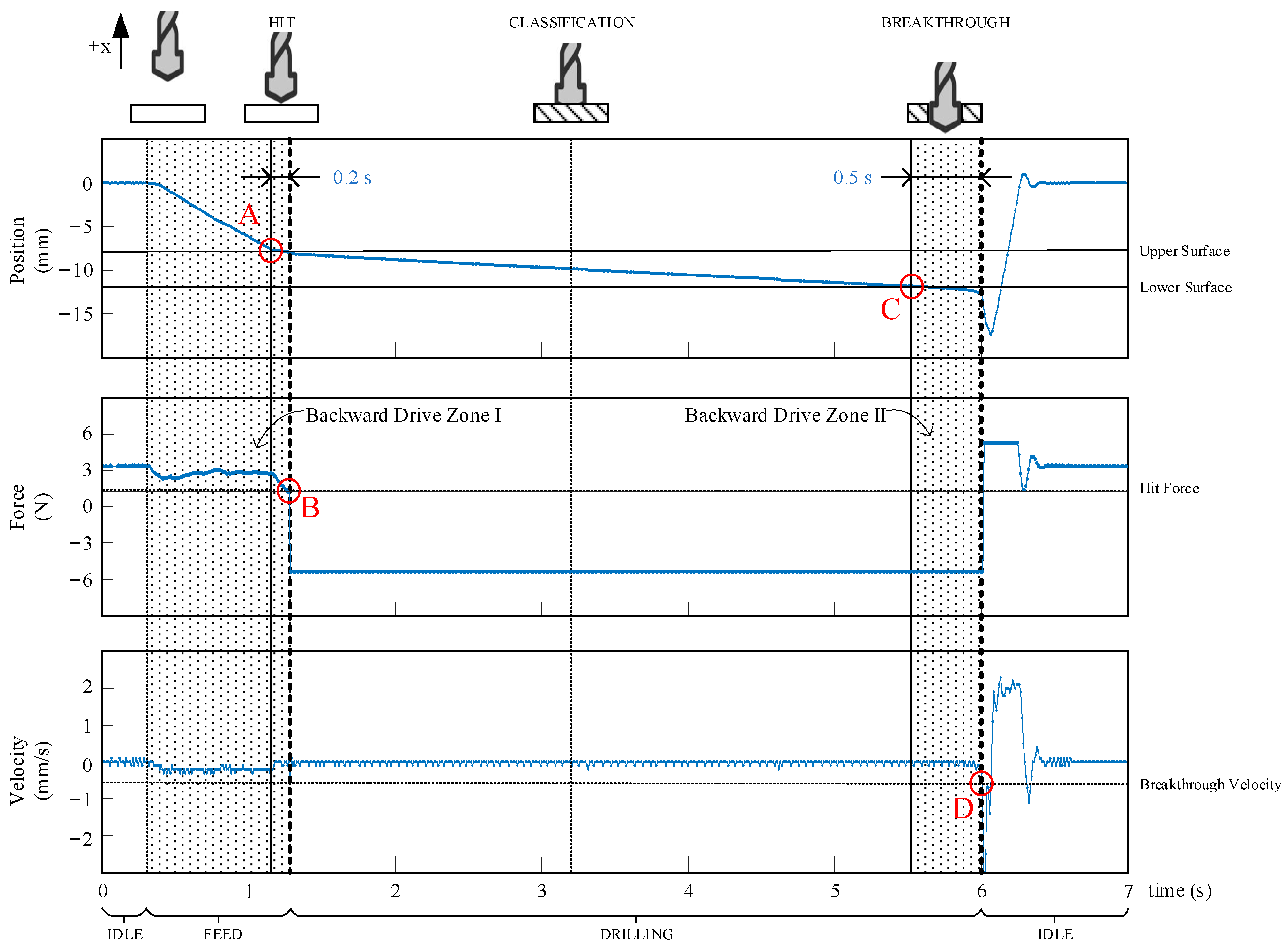
4.2. HIT and BREAKTHROUGH Detection
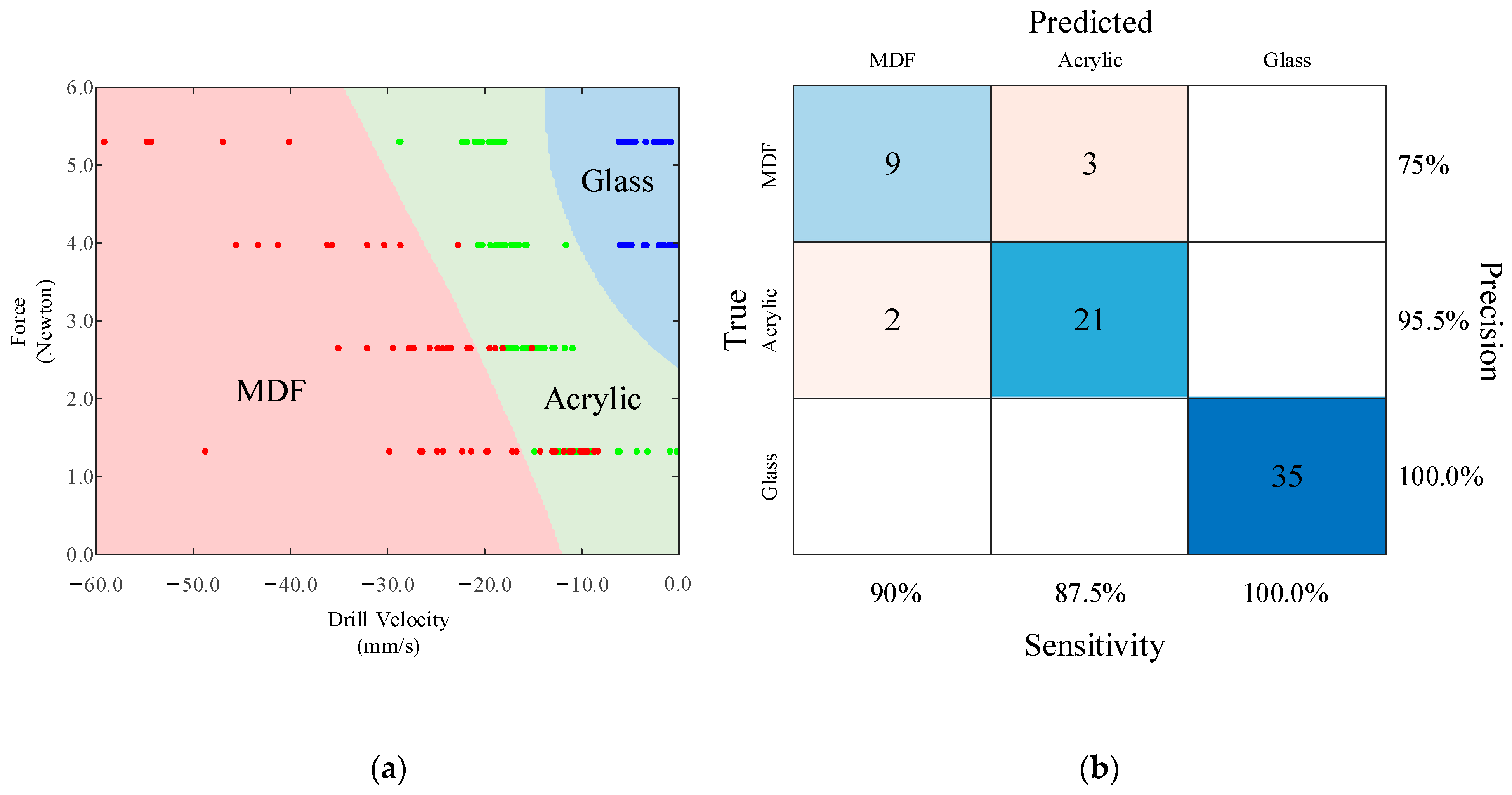
4.3. Material Classification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xu, X. Machine Tool 4.0 for the new era of manufacturing. Int. J. Adv. Manuf. Technol. 2017, 92, 1893–1900. [Google Scholar] [CrossRef]
- Walker, J.R. Machining Fundamentals: From Basic to Advanced Techniques; Goodheart-Willcox Company: Tinley Park, IL, USA, 1998. [Google Scholar]
- Xu, L.D.; Xu, E.L.; Li, L. Industry 4.0: State of the art and future trends. Int. J. Prod. Res. 2018, 56, 2941–2962. [Google Scholar] [CrossRef]
- Grzesik, W. Advanced Machining Processes of Metallic Materials; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Lasemi, A.; Xue, D.; Gu, P. Recent development in CNC machining of freeform surfaces: A state-of-the-art review CAD Comput. Aided Des. 2010, 42, 641–654. [Google Scholar] [CrossRef]
- Ding, K.; Fu, Y.; Su, H.; Chen, Y.; Yu, X.; Ding, G. Experimental studies on drilling tool load and machining quality of C/SiC composites in rotary ultrasonic machining. J. Mater. Process. Technol. 2014, 214, 2900–2907. [Google Scholar] [CrossRef]
- Liu, D.; Tang, Y.; Cong, W.L. A review of mechanical drilling for composite laminates. Compos. Struct. 2012, 94, 1265–1279. [Google Scholar] [CrossRef]
- Qi, Z.; Zhang, K.; Li, Y.; Liu, S.; Cheng, H. Critical thrust force predicting modeling for delamination-free drilling of metal-FRP stacks. Compos. Struct. 2014, 107, 604–609. [Google Scholar] [CrossRef]
- Aamir, M.; Tolouei-Rad, M.; Giasin, K.; Nosrati, A. Recent advances in drilling of carbon fiber–reinforced polymers for aerospace applications: A review. Int. J. Adv. Manuf. Technol. 2019, 105, 2289–2308. [Google Scholar] [CrossRef]
- Aamir, M.; Giasin, K.; Tolouei-Rad, M.; Vafadar, A. A review: Drilling performance and hole quality of aluminium alloys for aerospace applications. J. Mater. Res. Technol. 2020, 9, 12484–12500. [Google Scholar] [CrossRef]
- Fernández-Pérez, J.; Domínguez-Monferrer, C.; Miguélez, M.H.; Cantero, J.L. Analysis of Tool Wear and Hole Delamination for Large-Diameter Drilling of CFRP Aircraft Fuselage Components: Identifying Performance Improvement Drivers and Optimization Opportunities. J. Manuf. Mater. Process. 2023, 7, 76. [Google Scholar] [CrossRef]
- Wang, C.; Cheng, K.; Rakowski, R.; Greenwood, D.; Wale, J. Comparative studies on the effect of pilot drillings with application to high-speed drilling of carbon fibre reinforced plastic (CFRP) composites. Int. J. Adv. Manuf. Technol. 2017, 89, 3243–3255. [Google Scholar] [CrossRef]
- Thoben, K.D.; Wiesner, S.A.; Wuest, T. Industrie 4.0 and smart manufacturing-a review of research issues and application examples. Int. J. Autom. Technol. 2017, 11, 4–16. [Google Scholar] [CrossRef]
- Lee, J.; Bagheri, B.; Kao, H.-A. Cyber-Physical Systems architecture for Industry 4.0-based manufacturing systems. Manuf. Lett. 2015, 3, 18–23. [Google Scholar] [CrossRef]
- Lu, Y. Industry 4.0: A survey on technologies, applications and open research issues. J. Ind. Inf. Integr. 2017, 6, 1–10. [Google Scholar] [CrossRef]
- Monostori, L.; Kádár, B.; Bauernhansl, T.; Kondoh, S.; Kumara, S.; Reinhart, G.; Sauer, O.; Schuh, G.; Sihn, W.; Ueda, K. Cyber-physical systems in manufacturing. CIRP Ann. 2016, 65, 621–641. [Google Scholar] [CrossRef]
- Lin, J.; Yu, W.; Zhang, N.; Yang, X.; Zhang, H.; Zhao, W. A Survey on Internet of Things: Architecture, Enabling Technologies, Security and Privacy, and Applications. IEEE Internet Things J. 2017, 4, 1125–1142. [Google Scholar] [CrossRef]
- Hehenberger, P.; Vogel-Heuser, B.; Bradley, D.; Eynard, B.; Tomiyama, T.; Achiche, S. Design, modelling, simulation and integration of cyber physical systems: Methods and applications. Comput. Ind. 2016, 82, 273–289. [Google Scholar] [CrossRef]
- Liu, Y.; Peng, Y.; Wang, B.; Yao, S.; Liu, Z. Review on cyber-physical systems. IEEE/CAA J. Autom. Sin. 2017, 4, 27–40. [Google Scholar] [CrossRef]
- Lins, R.G.; de Araujo, P.R.M.; Corazzim, M. In-process machine vision monitoring of tool wear for Cyber-Physical Production Systems. Robot. Comput. Integr. Manuf. 2020, 61, 101859. [Google Scholar] [CrossRef]
- Bernard, G.; Achiche, S.; Girard, S.; Mayer, R. Condition Monitoring of Manufacturing Processes under Low Sampling Rate. J. Manuf. Mater. Process. 2021, 5, 26. Available online: https://www.mdpi.com/2504-4494/5/1/26 (accessed on 7 August 2023). [CrossRef]
- Oztemel, E.; Gursev, S. Literature review of Industry 4.0 and related technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- del Real Torres, A.; Andreiana, D.S.; Roldán, Á.O.; Bustos, A.H.; Galicia, L.E.A. A Review of Deep Reinforcement Learning Approaches for Smart Manufacturing in Industry 4.0 and 5.0 Framework. Appl. Sci. 2022, 12, 12377. Available online: https://www.mdpi.com/2076-3417/12/23/12377 (accessed on 7 August 2023). [CrossRef]
- He, F.; Yuan, L.; Mu, H.; Ros, M.; Ding, D.; Pan, Z.; Li, H. Research and application of artificial intelligence techniques for wire arc additive manufacturing: A state-of-the-art review. Robot. Comput. Integr. Manuf. 2023, 82, 102525. [Google Scholar] [CrossRef]
- Merchant, M.E. Mechanics of the metal cutting process. I. Orthogonal cutting and a type 2 chip. J. Appl. Phys. 1945, 16, 267–275. [Google Scholar] [CrossRef]
- Geier, N.; Davim, J.P.; Szalay, T. Advanced cutting tools and technologies for drilling carbon fibre reinforced polymer (CFRP) composites: A review. Compos. Part A Appl. Sci. Manuf. 2019, 125, 105552. [Google Scholar] [CrossRef]
- Huang, B.; Wang, W.-H.; Xiong, Y.-F.; Wu, X.-F.; Liu, J.-T.; Liu, C.; Wang, D.-H. Investigation of force modeling in ultrasonic vibration-assisted drilling SiCf/SiC ceramic matrix composites. J. Manuf. Process. 2023, 96, 21–30. [Google Scholar] [CrossRef]
- Yuan, S.; Zhang, C.; Amin, M.; Fan, H.; Liu, M. Development of a cutting force prediction model based on brittle fracture for carbon fiber reinforced polymers for rotary ultrasonic drilling. Int. J. Adv. Manuf. Technol. 2015, 81, 1223–1231. [Google Scholar] [CrossRef]
- Zhao, M.; Wang, F.; Fu, R.; Sun, K.; Du, C.; Cui, J. Drilling study on CFRP/Al stack with different CFRP thickness using chip-breaking step drill bit. J. Manuf. Process. 2023, 90, 300–309. [Google Scholar] [CrossRef]
- Hagag, A.M.; Yousef, L.S.; Abdelmaguid, T.F. Multi-Criteria Decision-Making for Machine Selection in Manufacturing and Construction: Recent Trends. Mathematics 2023, 11, 631. Available online: https://www.mdpi.com/2227-7390/11/3/631 (accessed on 7 August 2023). [CrossRef]
- Ze, G.K.; Pramanik, A.; Basak, A.K.; Prakash, C.; Shankar, S.; Radhika, N. Challenges associated with drilling of carbon fiber reinforced polymer (CFRP) composites-A review. Compos. Part C Open Access 2023, 11, 100356. [Google Scholar] [CrossRef]
- Bai, X.; Qiao, G.; Liu, Z.; Zhu, W. Investigation of transient machining in the cortical bone drilling process by conventional and axial vibration-assisted drilling methods. Proc. Inst. Mech. Eng. H J. Eng. Med. 2023, 237, 489–501. [Google Scholar] [CrossRef]
- Aziz, M.H.; Ayub, M.A.; Jaafar, R. Real-time algorithm for detection of breakthrough bone drilling. Procedia Eng. 2012, 41, 352–359. Available online: https://www.scopus.com/inward/record.uri?eid=2-s2.0-84893674268&doi=10.1016%2fj.proeng.2012.07.184&partnerID=40&md5=3c768299b4b07872c9a339f434be13ac (accessed on 7 August 2023). [CrossRef]
- Díaz, I.; Gil, J.J.; Louredo, M. Bone drilling methodology and tool based on position measurements. Comput. Methods Programs Biomed. 2013, 112, 284–292. [Google Scholar] [CrossRef]
- Seibold, M.; Maurer, S.; Hoch, A.; Zingg, P.; Farshad, M.; Navab, N.; Fürnstahl, P. Real-time acoustic sensing and artificial intelligence for error prevention in orthopedic surgery. Sci. Rep. 2021, 11, 3993. [Google Scholar] [CrossRef] [PubMed]
- Torun, Y.; Öztürk, A. A New Breakthrough Detection Method for Bone Drilling in Robotic Orthopedic Surgery with Closed-Loop Control Approach. Ann. Biomed. Eng. 2020, 48, 1218–1229. [Google Scholar] [CrossRef]
- Dai, Y.; Xue, Y.; Zhang, J. Drilling electrode for real-time measurement of electrical impedance in bone tissues. Ann. Biomed. Eng. 2014, 42, 579–588. [Google Scholar] [CrossRef] [PubMed]
- Serway, R.A.; Jewett, J.W. Physics for Scientists and Engineers; Cengage Learning: Boston, MA, USA, 2013. [Google Scholar]
- Butler, Q.; Ziada, Y.; Stephenson, D.; Gadsden, S.A. Condition Monitoring of Machine Tool Feed Drives: A Review. J. Manuf. Sci. Eng. 2022, 144, 100802. [Google Scholar] [CrossRef]
- Feng, G.-H.; Pan, Y.-L. Investigation of ball screw preload variation based on dynamic modeling of a preload adjustable feed-drive system and spectrum analysis of ball-nuts sensed vibration signals. Int. J. Mach. Tools Manuf. 2012, 52, 85–96. [Google Scholar] [CrossRef]
- Li, P.; Jia, X.; Feng, J.; Davari, H.; Qiao, G.; Hwang, Y.; Lee, J. Prognosability study of ball screw degradation using systematic methodology. Mech. Syst. Signal Process. 2018, 109, 45–57. [Google Scholar] [CrossRef]
- Sclater, N. Mechanisms and Mechanical Devices Sourcebook, 5th ed.; McGraw-Hill Education: New York, NY, USA, 2011. [Google Scholar]
- Suh, S.H.; Kang, S.K.; Chung, D.H.; Stroud, I. Theory and Design of CNC Systems; Springer: London, UK, 2008. [Google Scholar]
- Rao, Y.S.; Mohan, N.S.; Shetty, N.; Acharya, S. Drilling Response of Carbon Fabric/Solid Lubricant Filler/Epoxy Hybrid Composites: An Experimental Investigation. J. Compos. Sci. 2023, 7, 46. Available online: https://www.mdpi.com/2504-477X/7/2/46 (accessed on 7 August 2023). [CrossRef]
- Zhong, R.Y.; Xu, X.; Klotz, E.; Newman, S.T. Intelligent Manufacturing in the Context of Industry 4.0: A Review. Engineering 2017, 3, 616–630. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Nominal Thickness (mm) |
|---|---|
| MDF 1 | 4.0 |
| Acrylic 2 | 4.0 |
| Glass | 1.2 |
| Train | Test | Total | |
|---|---|---|---|
| MDF | 39 | 12 | 51 |
| Acrylic | 79 | 23 | 102 |
| Glass | 163 | 35 | 198 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaiprabha, K.; Chancharoen, R. Innovative Smart Drilling with Critical Event Detection and Material Classification. J. Manuf. Mater. Process. 2023, 7, 155. https://doi.org/10.3390/jmmp7050155
Chaiprabha K, Chancharoen R. Innovative Smart Drilling with Critical Event Detection and Material Classification. Journal of Manufacturing and Materials Processing. 2023; 7(5):155. https://doi.org/10.3390/jmmp7050155
Chicago/Turabian StyleChaiprabha, Kantawatchr, and Ratchatin Chancharoen. 2023. "Innovative Smart Drilling with Critical Event Detection and Material Classification" Journal of Manufacturing and Materials Processing 7, no. 5: 155. https://doi.org/10.3390/jmmp7050155
APA StyleChaiprabha, K., & Chancharoen, R. (2023). Innovative Smart Drilling with Critical Event Detection and Material Classification. Journal of Manufacturing and Materials Processing, 7(5), 155. https://doi.org/10.3390/jmmp7050155