
High-Altitude-UAV-Relayed Satellite D2D Communications for 6G IoT Network


Abstract
1. Introduction
2. Related Work
2.1. IoT Networks and Non-Terrestrial Networks (NTNs)
2.2. LEO Satellite Constellations
2.3. Satellite D2D Communications for IoT
2.4. HA-UAV-Assisted IoT Communications
2.5. Advanced Computational Methods for Network Optimization
3. System Model
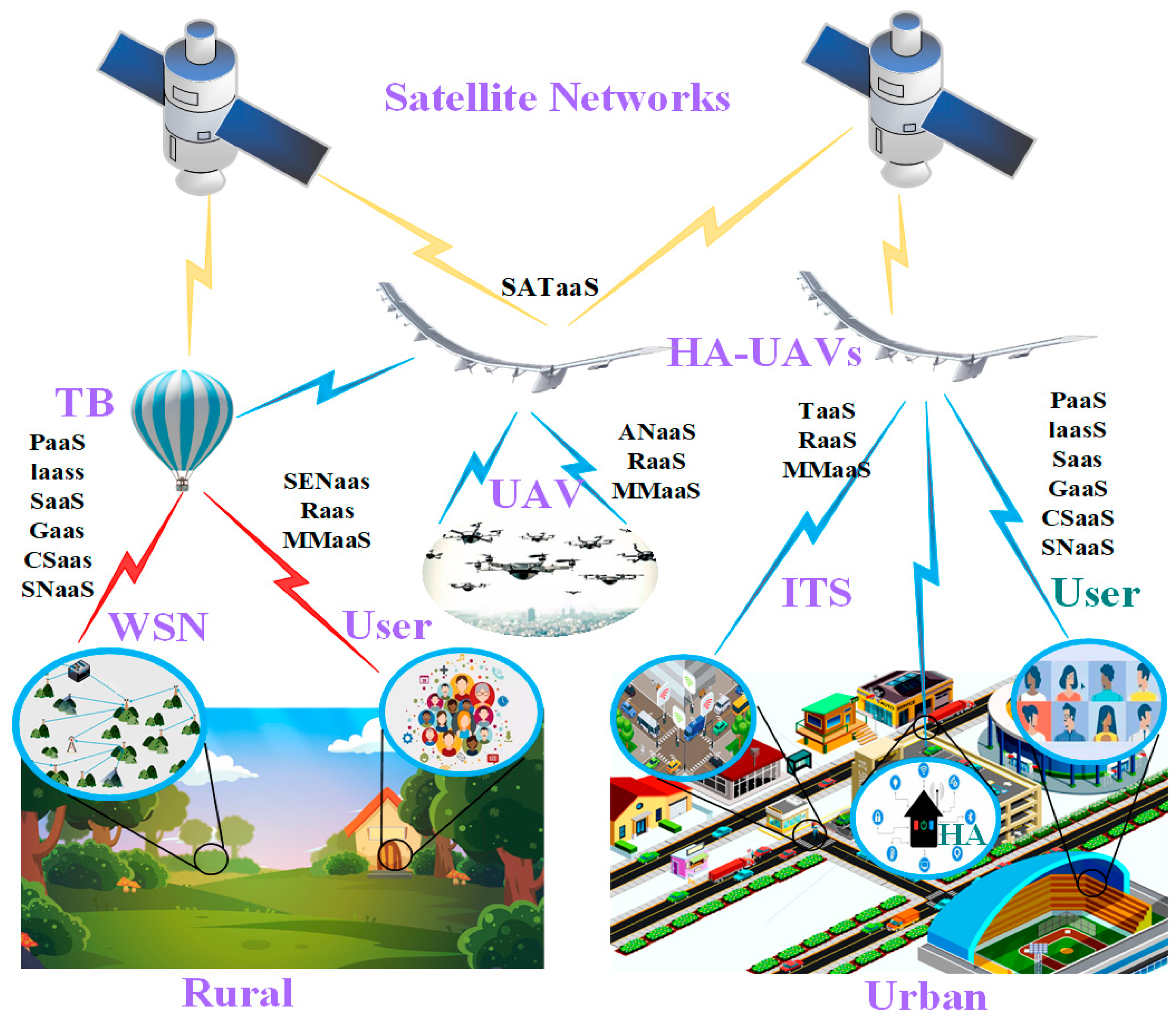
3.1. IoT-Focused Network Architecture
3.2. Communication Link Models
3.3. HA-UAV Relaying Scheme
4. Discussion: Optimizing IoT Communications via Large Language Models
4.1. LLM Framework for Joint Device Association and Resource Allocation
4.2. Action Dimension Reduction for Scalable Decision-Making
4.3. Dynamic Positioning of HA-UAVs Based on IoT Traffic Demands
4.4. LLM Training and Generalization
- Satellite telemetry data: this includes parameters such as satellite orbital position, communication load, and signal strength.
- HA-UAV positional data: these data comprise the current altitude of the HA-UAV, distance from the ground, and environmental conditions such as wind speed and weather variations.
- IoT device status: this includes each device’s physical location, current signal quality, power consumption status, and priority of network requests.
- Network traffic data: the model processes IoT communication demands, including data transmission rates, required bandwidth, and latency constraints.
- Device association decisions: the model predicts which IoT device should be connected to the optimal satellite or HA-UAV relay node.
- Resource allocation strategies: the LLM allocates resources such as bandwidth and spectrum in real time to balance network load and ensure efficient performance.
- HA-UAV positioning commands: the model dynamically adjusts the HA-UAV’s position based on predicted traffic demands, ensuring optimal coverage and minimizing latency.
- Training set: The training dataset contains approximately 500,000 samples, representing a wide variety of network scenarios, including different IoT device densities, mobility patterns, channel conditions, and network congestion levels. These samples simulate real-world conditions, enabling the model to generalize effectively across diverse network environments.
- Validation set: A separate validation set of 50,000 samples was used to tune hyperparameters and evaluate the model’s performance mid-training. This dataset ensured that the model’s learning process was on track and avoided overfitting.
- Test set: The test set, also consisting of 50,000 samples, was used to evaluate the model’s performance on unseen data. Like the training data, this set encompasses varying IoT device densities, mobility patterns, bandwidth demands, and interference conditions, ensuring the model’s robustness in real-world scenarios.
5. Simulation Results
5.1. Simulation Setup
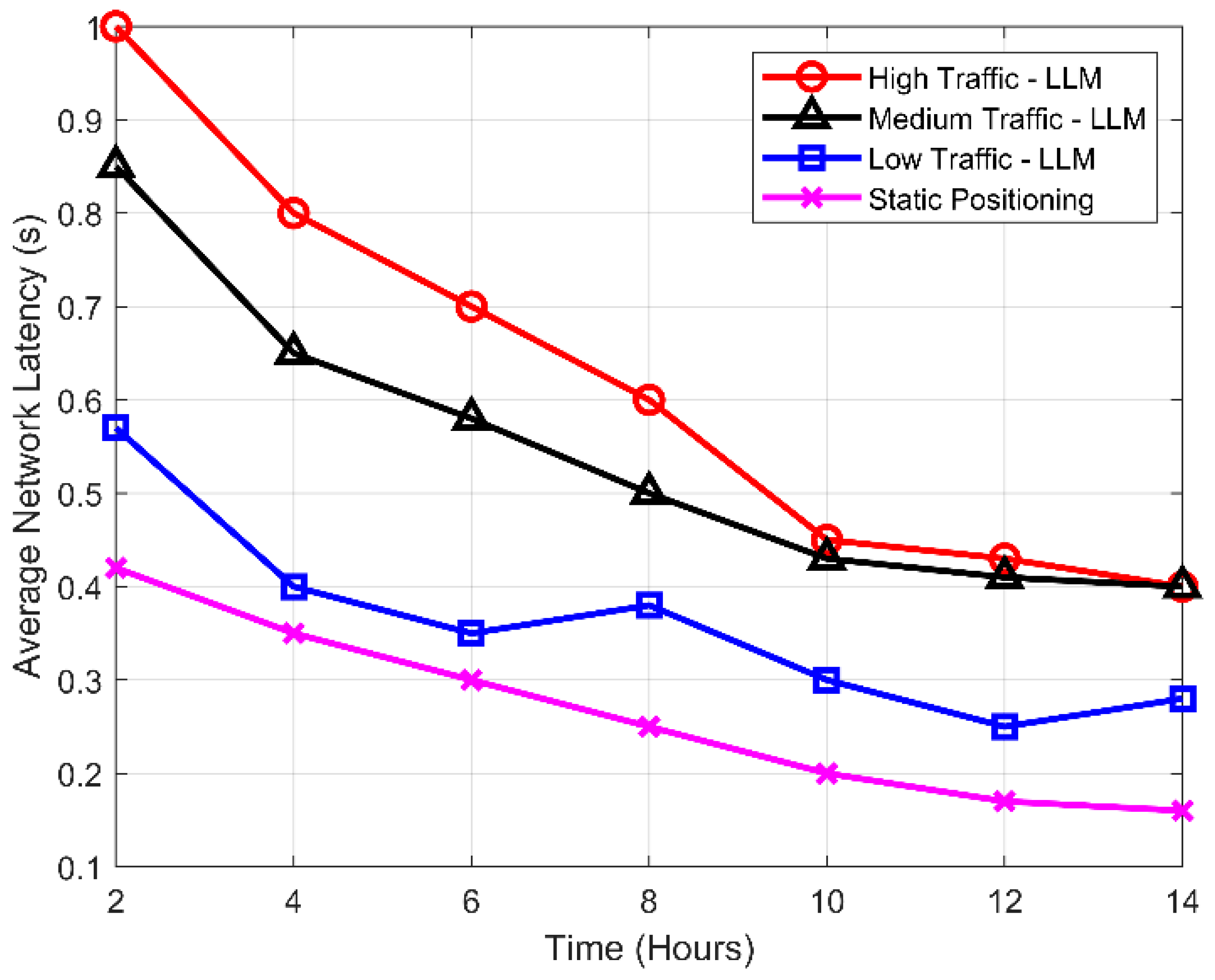
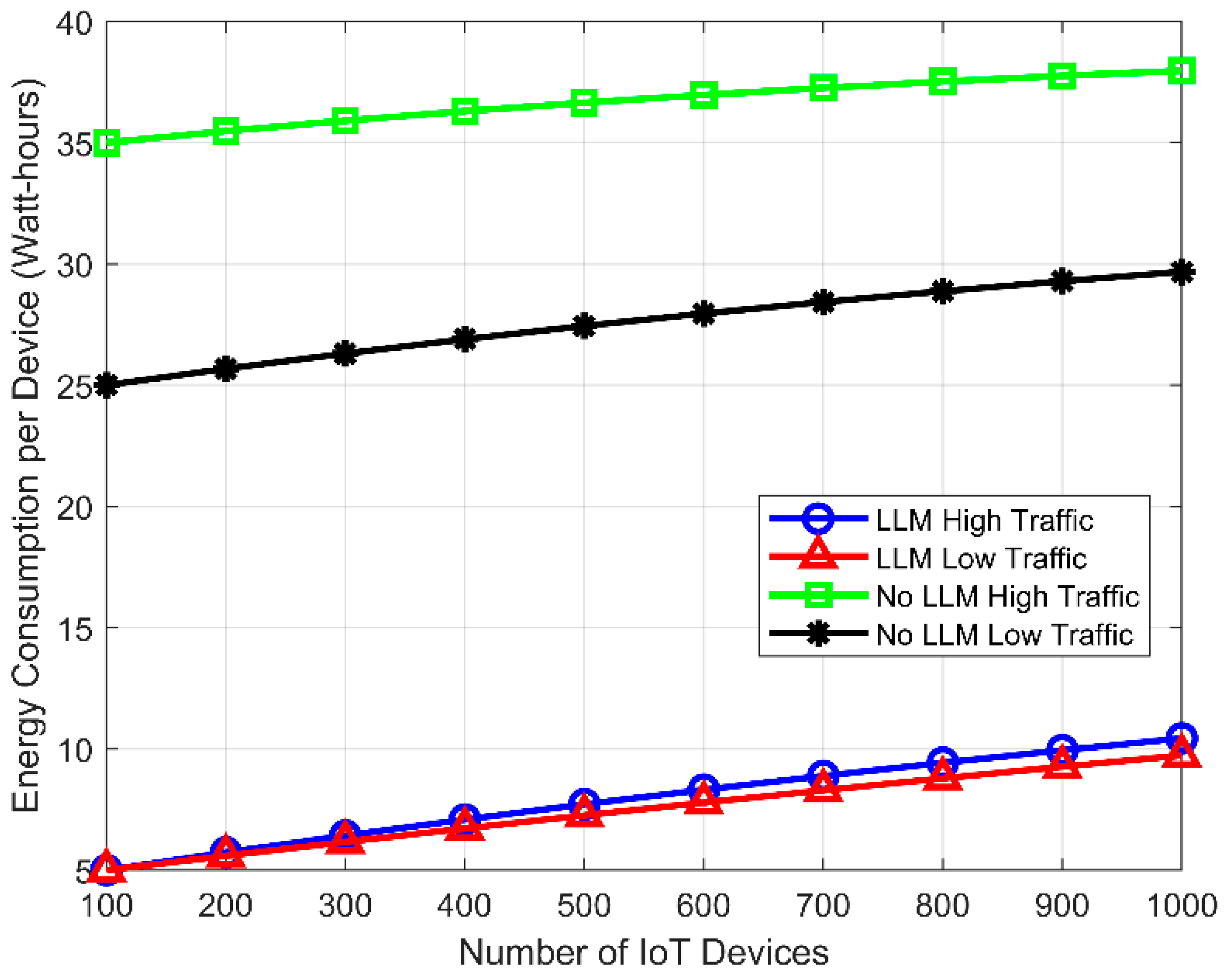
5.2. Results and Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Khanna, A.; Kaur, S. Internet of Things (IoT), applications and challenges: A comprehensive review. Wirel. Pers. Commun. 2020, 114, 1687–1762. [Google Scholar] [CrossRef]
- Mohanta, K.; Al-Rubaye, S. Towards 6G Satellite–Terrestrial Networks: Analysis of Air Mobility Operations. Electronics 2024, 13, 2855. [Google Scholar] [CrossRef]
- Kafıloğlu, S.S.; Gür, G.; Alagöz, F. Connectivity mode management for user devices in heterogeneous D2D networks. IEEE Wirel. Commun. Lett. 2020, 10, 194–198. [Google Scholar] [CrossRef]
- Nawaz, U.; Rehman, F.; Ullah, K.A.; Raza, U.A.; Sharif, H.; Iqbal, M.J. Analysis of Device-to-Device Communication in IoT System. Pak. J. Eng. Technol. 2023, 6, 21–31. [Google Scholar] [CrossRef]
- Tsai, H.-Y.; Tseng, M.-H. Evaluating Multimodal Techniques for Predicting Visibility in the Atmosphere Using Satellite Images and Environmental Data. Electronics 2024, 13, 2585. [Google Scholar] [CrossRef]
- Kurt, G.K.; Yanikomeroglu, H. Communication, computing, caching, and sensing for next-generation aerial delivery networks: Using a high-altitude platform station as an enabling technology. IEEE Veh. Technol. Mag. 2021, 16, 108–117. [Google Scholar] [CrossRef]
- Xue, Y.; Yang, Z.; Yang, W.; Yang, J. D2D Resource Allocation and Power Control Algorithms Based on Graph Coloring in 5G IoT. In Proceedings of the 2019 Computing, Communications and IoT Applications (ComComAp), Shenzhen, China, 26–28 October 2019; pp. 17–22. [Google Scholar] [CrossRef]
- Gao, C.; Bian, X.; Hu, B.; Chen, S.; Wang, H. Intelligent Online Offloading and Resource Allocation for HAP Drones and Satellite Collaborative Networks. Drones 2024, 8, 245. [Google Scholar] [CrossRef]
- Kurt, G.K.; Khoshkholgh, M.G.; Alfattani, S.; Ibrahim, A.; Darwish, T.S.; Alam, M.S.; Yanikomeroglu, H.; Yongacoglu, A. A vision and framework for the high altitude platform station (HAPS) networks of the future. IEEE Commun. Surv. Tutor. 2021, 23, 729–779. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, H.; Du, S.; Liu, J.; Zhang, L.; Liu, Q. Reinforcement Learning-Based Resource Allocation and Energy Efficiency Optimization for a Space–Air–Ground-Integrated Network. Electronics 2024, 13, 1792. [Google Scholar] [CrossRef]
- Zhong, N.; Wang, Y.; Xiong, R.; Zheng, Y.; Li, Y.; Ouyang, M.; Shen, D.; Zhu, X. CASIT: Collective Intelligent Agent System for Internet of Things. IEEE Internet Things J. 2024, 11, 19646–19656. [Google Scholar] [CrossRef]
- Huang, X.; Xia, X.; Wang, Z.; Peng, M. Joint Drone Access and LEO Satellite Backhaul for a Space–Air–Ground Integrated Network: A Multi-Agent Deep Reinforcement Learning-Based Approach. Drones 2024, 8, 218. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, P.; Li, C.; Zhu, H.; Xu, G.; Sun, C. A Collaborative Inference Algorithm in Low-Earth-Orbit Satellite Network for Unmanned Aerial Vehicle. Drones 2023, 7, 575. [Google Scholar] [CrossRef]
- Dinelli, C.; Racette, J.; Escarcega, M.; Lotero, S.; Gordon, J.; Montoya, J.; Dunaway, C.; Androulakis, V.; Khaniani, H.; Shao, S.; et al. Configurations and Applications of Multi-Agent Hybrid Drone/Unmanned Ground Vehicle for Underground Environments: A Review. Drones 2023, 7, 136. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, C.; Chen, G.; Song, R.; Song, S.; Xiao, P. Deep Learning Empowered Trajectory and Passive Beamforming Design in UAV-RIS Enabled Secure Cognitive Non-Terrestrial Networks. IEEE Wirel. Commun. Lett. 2024, 13, 188–192. [Google Scholar] [CrossRef]
- Pei, J.; Chen, H.; Tse, C.K. UAV Swarm for Connectivity Enhancement of Multiple Isolated Sensor Networks for Internet of Things Application. IEEE Trans. Veh. Technol. 2023, 72, 3914–3929. [Google Scholar] [CrossRef]
- Al-Hraishawi, H.; Chougrani, H.; Kisseleff, S.; Lagunas, E.; Chatzinotas, S. A Survey on Nongeostationary Satellite Systems: The Communication Perspective. IEEE Commun. Surv. Tutor. 2023, 25, 101–132. [Google Scholar] [CrossRef]
- Giordano, M.; Baumann, N.; Crabolu, M.; Fischer, R.; Bellusci, G.; Magno, M. Design and Performance Evaluation of an Ultralow-Power Smart IoT Device With Embedded TinyML for Asset Activity Monitoring. IEEE Trans. Instrum. Meas. 2022, 71, 2510711. [Google Scholar] [CrossRef]
- Traspadini, A.; Giordani, M.; Giambene, G.; Zorzi, M. Real-Time HAP-Assisted Vehicular Edge Computing for Rural Areas. IEEE Wirel. Commun. Lett. 2023, 12, 674–678. [Google Scholar] [CrossRef]
- Giuliano, R.; Innocenti, E. Machine learning techniques for non-terrestrial networks. Electronics 2023, 12, 652. [Google Scholar] [CrossRef]
- Do, T.N.; Kaddoum, G. Distributed Machine Learning for Terrestrial and Non-Terrestrial Internet of Things Networks. IEEE Internet Things Mag. 2023, 6, 54–61. [Google Scholar] [CrossRef]
- Dahrouj, H.; Liu, S.; Alouini, M.-S. Machine Learning-Based User Scheduling in Integrated Satellite-HAPS-Ground Networks. IEEE Netw. 2023, 37, 102–109. [Google Scholar] [CrossRef]
- Capez, G.M.; Henn, S.; Fraire, J.A.; Garello, R. Sparse satellite constellation design for global and regional direct-to-satellite IoT services. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3786–3801. [Google Scholar] [CrossRef]
- De Curtò, J.; de Zarzà, I.; Roig, G.; Cano, J.C.; Manzoni, P.; Calafate, C.T. LLM-Informed Multi-Armed Bandit Strategies for Non-Stationary Environments. Electronics 2023, 12, 2814. [Google Scholar] [CrossRef]
- Luo, Y.; Fu, G. UAV based device to device communication for 5G/6G networks using optimized deep learning models. Wirel. Netw. 2023, 1–15. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed]
- Marchese, M.; Moheddine, A.; Patrone, F. IoT and UAV Integration in 5G Hybrid Terrestrial-Satellite Networks. Sensors 2019, 19, 3704. [Google Scholar] [CrossRef]
- Nasrollahi, S.; Mirrezaei, S.M. Toward UAV-based communication: Improving throughput by optimum trajectory and power allocation. EURASIP J. Wirel. Commun. Netw. 2022, 2022, 9. [Google Scholar] [CrossRef]
- Ben Aissa, S.; Ben Letaifa, A. UAV Communications with Machine Learning: Challenges, Applications and Open Issues. Arab. J. Sci. Eng. 2022, 47, 1559–1579. [Google Scholar] [CrossRef]
- Yang, P.; Cao, X.; Quek, T.Q.S.; Wu, D.O. Networking of Internet of UAVs: Challenges and Intelligent Approaches. IEEE Wirel. Commun. 2024, 31, 156–163. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Notes |
|---|---|---|
| Orbital Altitude | 500–2000 km | The range of altitudes at which LEO satellites orbit |
| Number of Satellites | 1000–3000 | The number of satellites in a LEO constellation |
| Latency | 20–40 ms | Latency from LEO satellites to HA-UAVs |
| Coverage Radius | 1200 km | Coverage radius of each satellite |
| Height of the HA-UAVs | 20 km | Strategic altitude for coverage |
| Minimum and Maximum HA-UAV Height | 22.5 m, 150 m | Operational range for HA-UAVs |
| Height of Users | 1.5 m | Typical user device height |
| Carrier Frequency | 28, 2.11 GHz | Operating frequency for UAV and HA-UAV communications |
| Noise Power Spectral Density | −174 dBm/Hz | Indicates the noise level in system |
| Number of HA-UAVs | 1 | Number of HA-UAVs in simulation |
| Height of Users | 20 km | Strategic altitude for optimal coverage |
| Total Number of Iterations (N) | 5740 | Total simulations run |
| Fixed Point Iterations (Nfp) | 500 | Iterations for convergence |
| Transmission Power | 43.24 dBm | Standard power level for effective signal strength |
| Path Loss | 61.4 dB | Average path loss encountered |
| Shadowing Standard Deviation | 5.8, 8.7 | Variability in signal due to obstacles |
| Batch Size | 128 | Number of data points processed together |
| Replay Memory Size | 5000 | Storage capacity for data reuse |
| Minimum Replay Memory Size | 264 | Minimum required storage for operations |
| Target Network Frequency Update | 10 | Frequency of updates to network settings |
| Trajectory Angle | 30–60° | Impact of flight trajectories (angles) of HA-UAVs on network performance |
| From HA-UAV to IoT Users (d_HA-UAVs_IoT) | 10–30 km | Effect of varying distances from HA-UAVs to satellite and HA-UAVs to IoT users |
| Trajectory Angle (θ) | Store-and-Forward with LLMs | Store-and-Forward without LLMs | Cooperative with LLMs (Turbo) | Cooperative without LLMs (Turbo) | |
|---|---|---|---|---|---|
| 30 | Latency (ms) | 25 | 36 | 8 | 32 |
| Packets Loss (%) | 0.04 | 0.051 | 0.009 | 0.042 | |
| 35 | Latency (ms) | 24 | 34 | 11 | 30 |
| Packets Loss (%) | 0.039 | 0.06 | 0.01 | 0.049 | |
| 40 | Latency (ms) | 24 | 34 | 13 | 29 |
| Packets Loss (%) | 0.031 | 0.068 | 0.011 | 0.051 | |
| 45 | Latency (ms) | 23 | 35 | 14 | 32 |
| Packets Loss (%) | 0.029 | 0.061 | 0.019 | 0.052 | |
| 50 | Latency (ms) | 22 | 37 | 0.02 | 33 |
| Packets Loss (%) | 0.028 | 0.051 | 0.02 | 0.051 | |
| 55 | Latency (ms) | 21 | 38 | 13 | 29 |
| Packets Loss (%) | 0.031 | 0.052 | 0.021 | 0.049 | |
| 60 | Latency (ms) | 19 | 35 | 10 | 25 |
| Packets Loss (%) | 0.04 | 0.059 | 0.028 | 0.05 | |
| Distance from HA-UAVs to IoT Users (km) | Store-and-Forward with LLMs | Store-and-Forward without LLMs | Cooperative with LLMs (Turbo) | Cooperative without LLMs (Turbo) | |
|---|---|---|---|---|---|
| 20 | Latency (ms) | 15 | 25 | 15 | 20 |
| Packets Loss (%) | 0.02 | 0.04 | 0.03 | 0.05 | |
| 22 | Latency (ms) | 25 | 35 | 10 | 15 |
| Packets Loss (%) | 0.04 | 0.06 | 0.02 | 0.04 | |
| 24 | Latency (ms) | 20 | 30 | 15 | 20 |
| Packets Loss (%) | 0.03 | 0.05 | 0.03 | 0.05 | |
| 26 | Latency (ms) | 25 | 35 | 10 | 15 |
| Packets Loss (%) | 0.04 | 0.06 | 0.02 | 0.04 | |
| 28 | Latency (ms) | 30 | 40 | 15 | 20 |
| Packets Loss (%) | 0.05 | 0.07 | 0.03 | 0.05 | |
| 30 | Latency (ms) | 20 | 30 | 10 | 15 |
| Packets Loss (%) | 0.03 | 0.05 | 0.02 | 0.04 | |
| Performance Metric | Distance | Without LLM | With LLM | Improvement |
|---|---|---|---|---|
| Throughput | 20 km | 20 Mbps | 25 Mbps | 25% |
| 30 km | 12 Mbps | 18 Mbps | 50% | |
| Latency | 20 km | 25 ms | 15 ms | 40% |
| 30 km | 30 ms | 20 ms | 33% | |
| Packets Loss | 20 km | 0.04% | 0.02% | 50% |
| 30 km | 0.05% | 0.03% | 40% | |
| Energy Efficiency | Overall | 0.25 μJ/bit | 0.18 μJ/bit | 28% |
| Contribution | This Work (LLM Integration) |
|---|---|
| Network Architecture [25] | Satellite-HA-UAV-IoT |
| AI/ML Technique [26] | LLM for predictive optimization |
| Throughput Improvement [27] | 37% increase |
| Latency Reduction [28] | 42% reduction |
| Energy Efficiency [29] | 28% improvement |
| Scalability [30] | Tested up to 5000 terminals/km2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Hong, T.; Qi, F.; Liu, L.; He, X. High-Altitude-UAV-Relayed Satellite D2D Communications for 6G IoT Network. Drones 2024, 8, 532. https://doi.org/10.3390/drones8100532
Wang J, Hong T, Qi F, Liu L, He X. High-Altitude-UAV-Relayed Satellite D2D Communications for 6G IoT Network. Drones. 2024; 8(10):532. https://doi.org/10.3390/drones8100532
Chicago/Turabian StyleWang, Jie, Tao Hong, Fei Qi, Lei Liu, and Xieyao He. 2024. "High-Altitude-UAV-Relayed Satellite D2D Communications for 6G IoT Network" Drones 8, no. 10: 532. https://doi.org/10.3390/drones8100532
APA StyleWang, J., Hong, T., Qi, F., Liu, L., & He, X. (2024). High-Altitude-UAV-Relayed Satellite D2D Communications for 6G IoT Network. Drones, 8(10), 532. https://doi.org/10.3390/drones8100532