
Adaptive Fault-Tolerant Tracking Control of Quadrotor UAVs against Uncertainties of Inertial Matrices and State Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
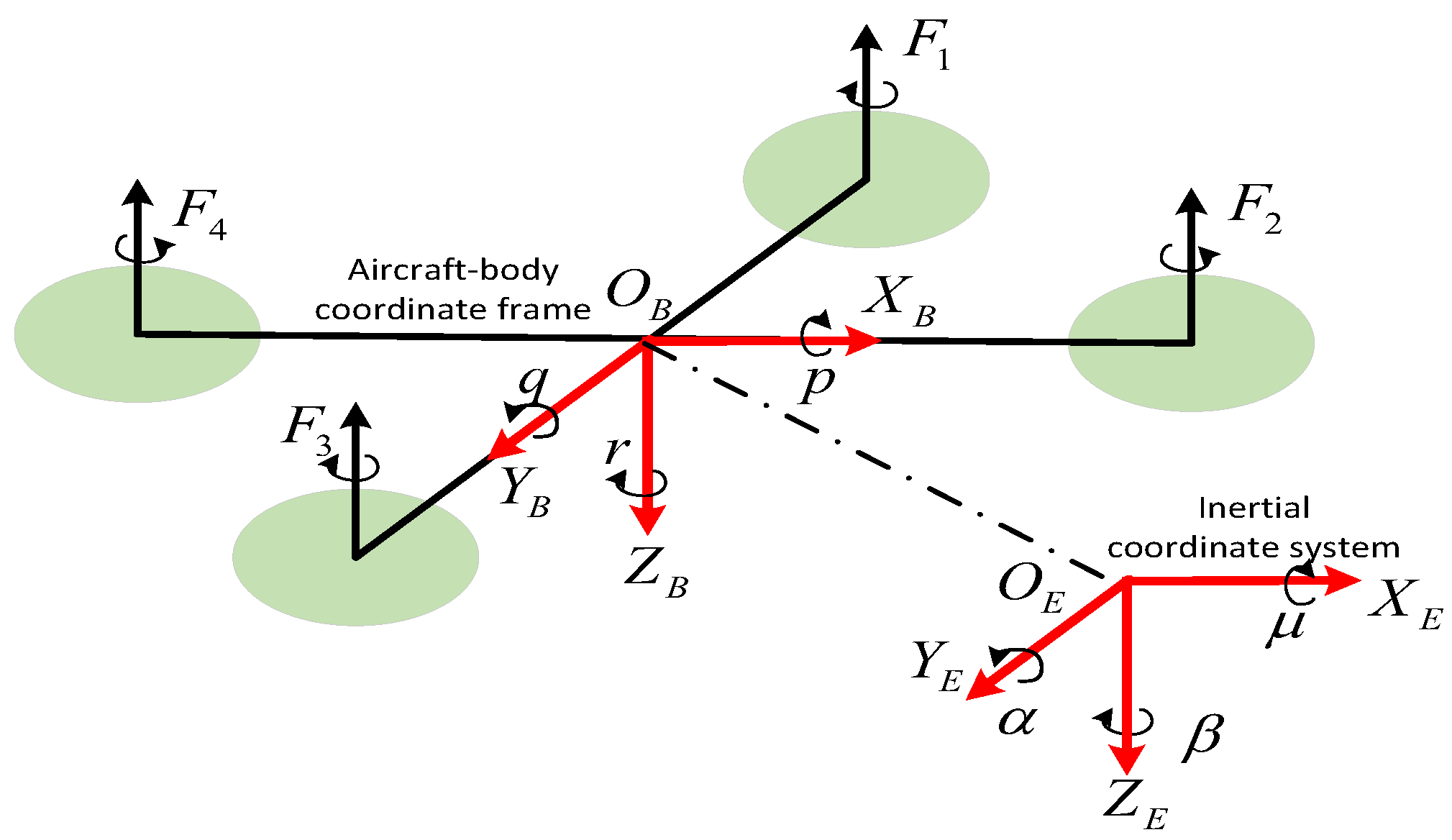
2.1. Attitude Dynamics of Quadrotor UAV
2.1.1. Attitude Angle Dynamic Equation
2.1.2. Attitude Angular Rate Dynamics
2.2. Actuator Fault and System Input Saturation
2.3. Problem Statement
3. Preliminary Knowledge
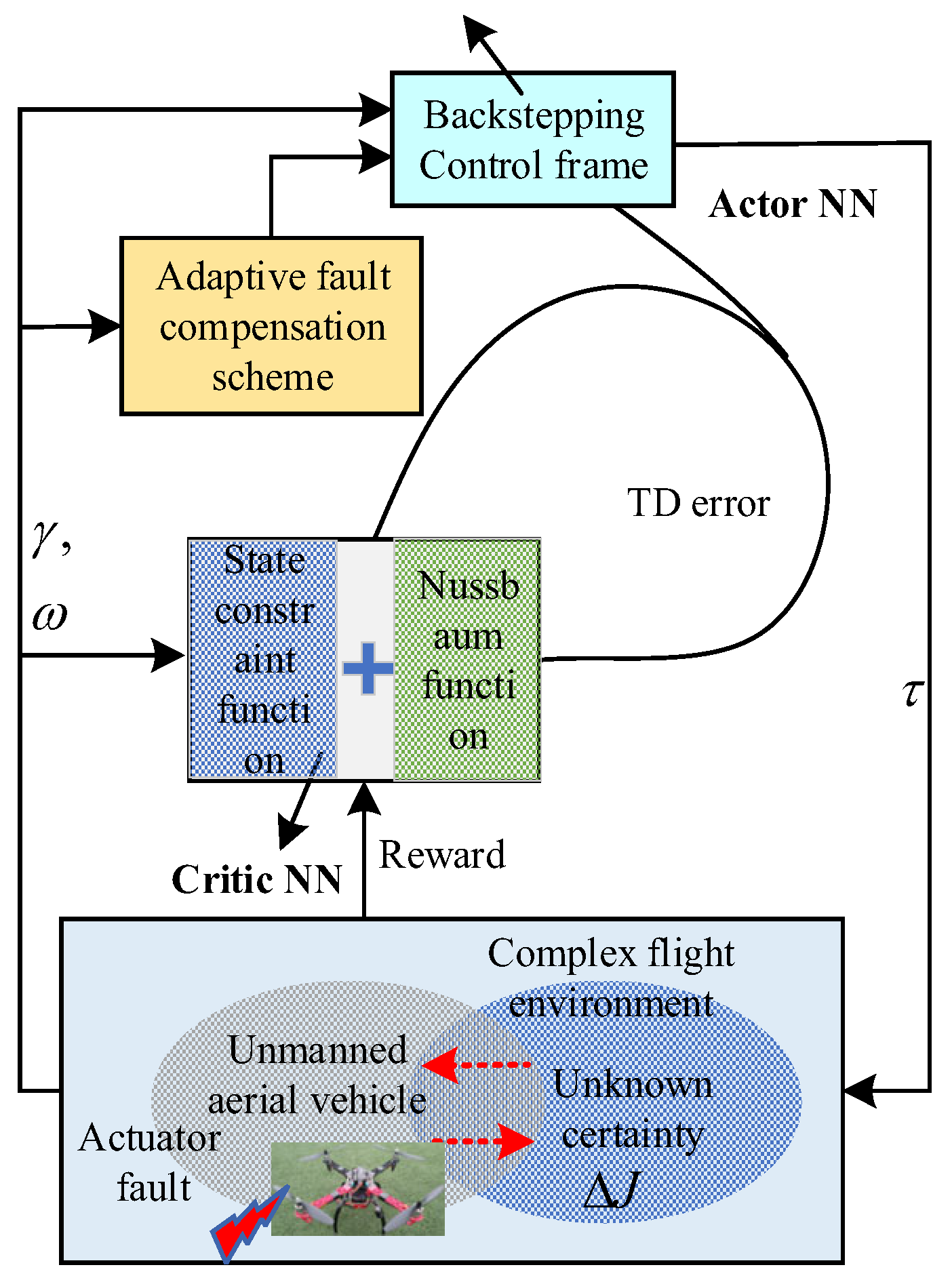
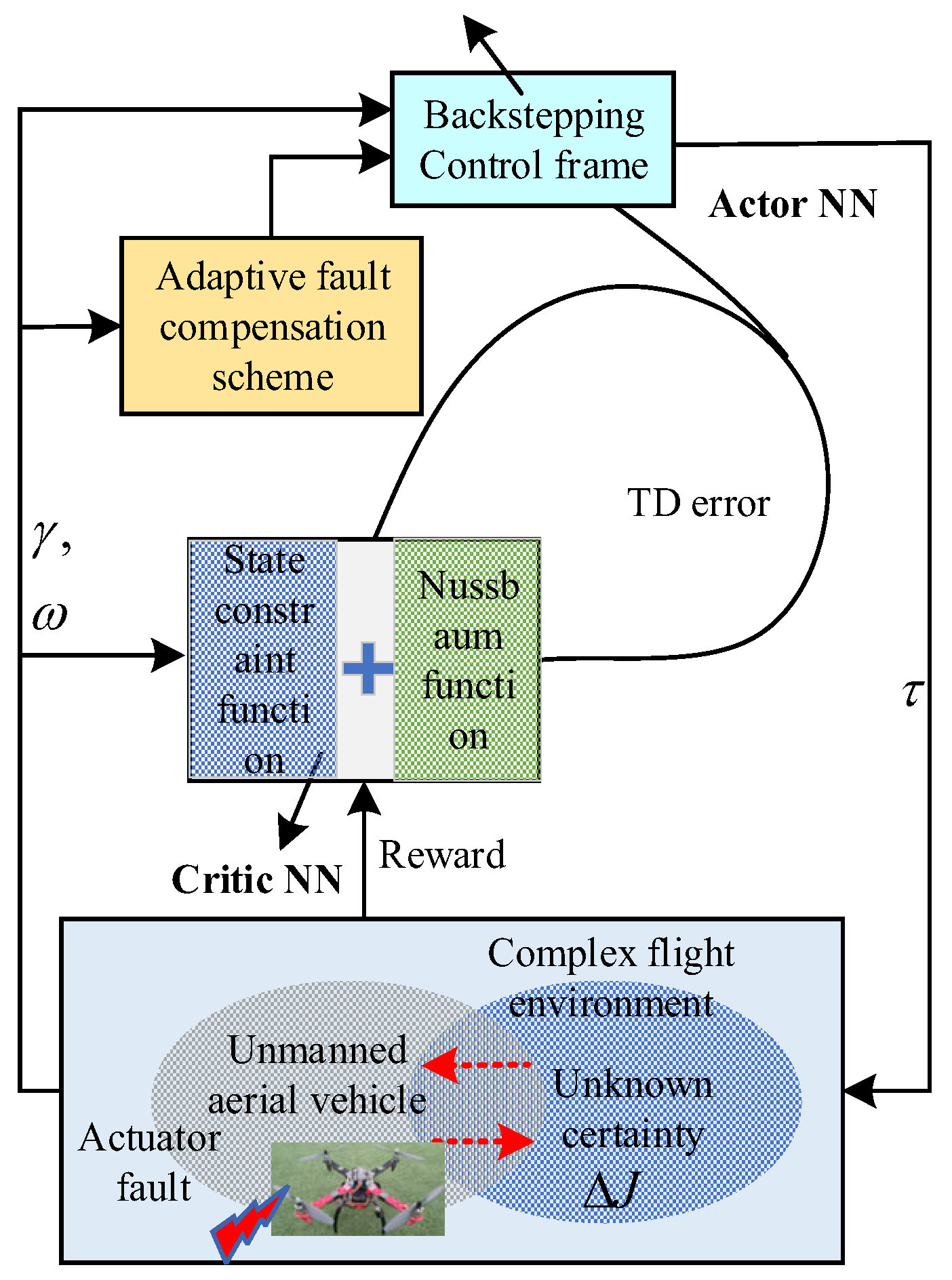
4. Integral Reinforcement Learning-Based Adaptive Neural Network Fault-Tolerant Control
4.1. State Constraints Penalty Function by Critic NN
4.2. Attitude Angle Controller Design with State Constraints by Critic NN
4.3. Attitude Angular Rate Controller Design Resorting to Action NN
- Uncertainties of of system: Then, in order to facilitate the subsequent derivation, we define that , drawing support from the operation rule [20], where . In this work, R can be made by can , where is delivered as follows:Furthermore, by the aid of synthesized adaptive control technology, the following expression is made to reduce the calculated load problem caused by too many estimated variables (). The details are shown as follows:where . The estimation of is defined as .
- Eccentric moment and Disturbance: For unknown disturbance and eccentric moment, an action RBFNN is established to approximate it and we havewhere stands for the ideal weight. represents the input vector for actor NN. denotes the Gaussian basis function. As for , it is assumed that , where is a positive constant. And then, we have the real time estimation asDefine the weight error for action NN:
- Uncertainties of inertial matrix: In order to conquer the challenge caused by time-varying coefficient matrix , as shown in (13), which is caused by actuator fault, input saturation combined with , recalling Nussbaum-type function, the final control law and adaptive law are proposed as follows:where with and being design parameters.
- Action NN design: There are two objectives for action NN design under the uncertainties caused by and actuator fault. One is to make follow well. The other one is to make minimized to its desired value . As a consequence, the following action error is defined asAnd then, the corresponding update law of is designed aswhere is a learning rate matrix to be designed, which is a positive definite matrix.
5. Stability Analysis
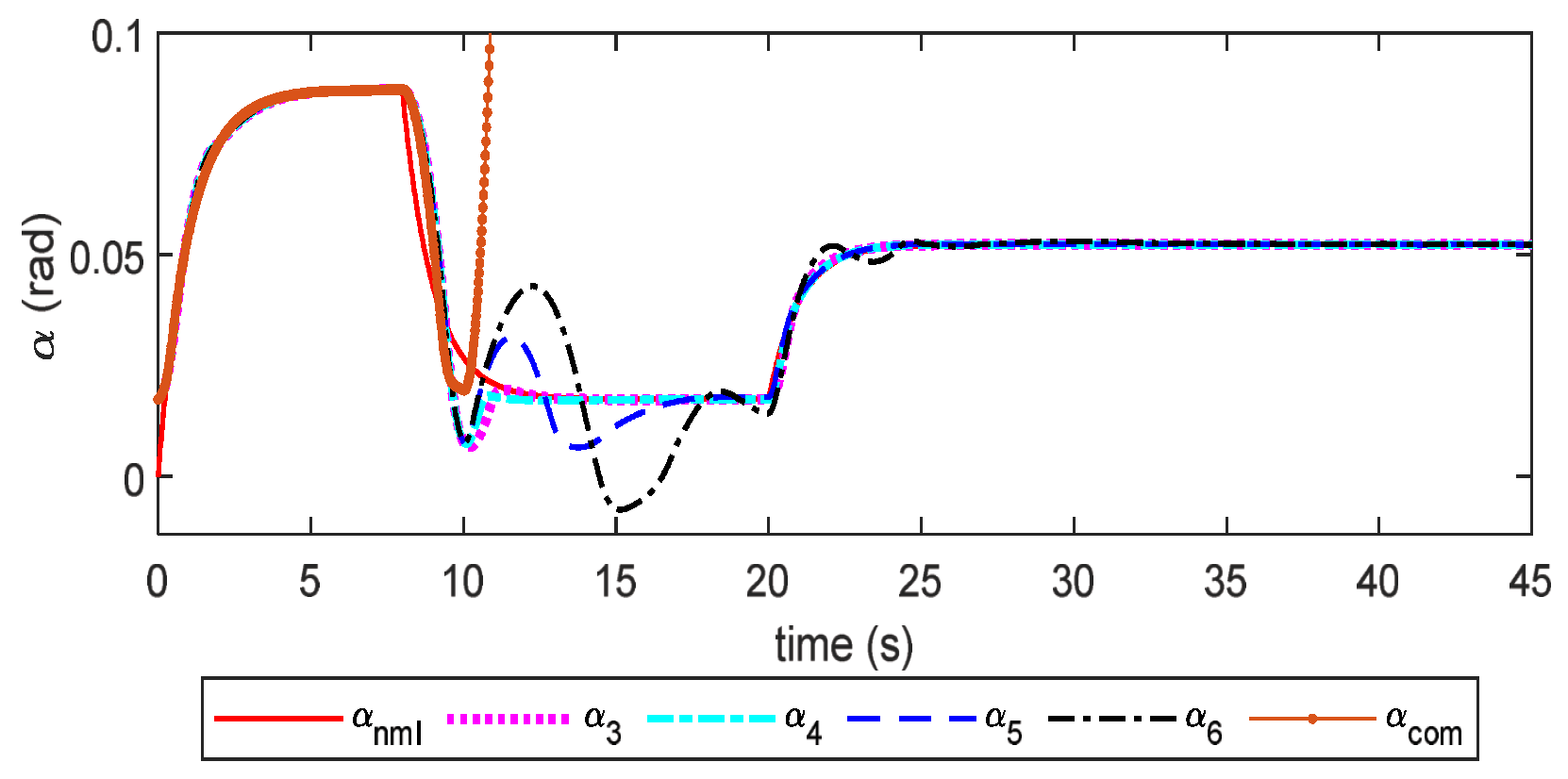
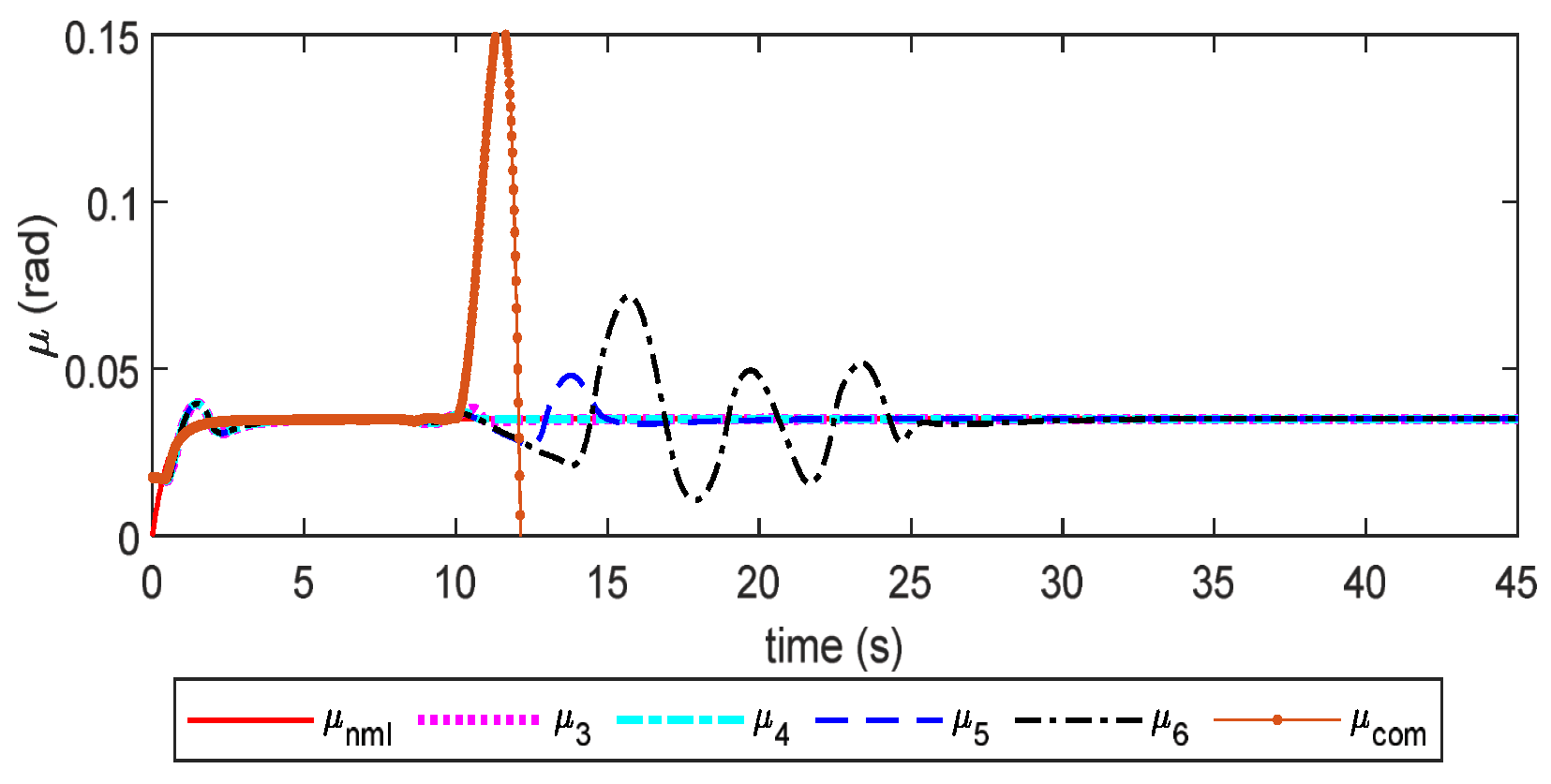
6. Simulation Studies
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Avram, R.C.; Zhang, X.; Muse, J. Nonlinear adaptive fault-tolerant quadrotor altitude and attitude tracking with multiple actuator faults. IEEE Trans. Control. Syst. Technol. 2017, 26, 701–707. [Google Scholar] [CrossRef]
- Han, S.K.; Hwang, S.; Joo, Y.H. Interval type-2 fuzzy-model-based fault-tolerant sliding mode tracking control of a quadrotor UAV under actuator saturation. IET Control. Theory Appl. 2021, 20, 3663–3675. [Google Scholar]
- Alarcon, C.; Jamett, M. Autonomous multirrotor design and simulation for search and rescue missions. In Proceedings of the 2018 IEEE International Conference on Automation/XXIII Congress of the Chilean Association of Automatic Control (ICA-ACCA), Concepcion, Chile, 17–19 October 2018; pp. 1–6. [Google Scholar]
- Yang, L.; Li, B.; Li, W.; Brand, H.; Jiang, B.; Xiao, J. Concrete defects inspection and 3D mapping using CityFlyer quadrotor robot. IEEE/CAA J. Autom. Sin. 2020, 7, 991–1002. [Google Scholar] [CrossRef]
- Zhong, S.; Chirarattananon, P. Direct visual-inertial ego-motion estimation via iterated extended kalman filter. IEEE Robot. Autom. Lett. 2020, 5, 1476–1483. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-driven fault diagnosis for traction systems in high-speed trains: A survey, challenges, and perspectives. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1700–1716. [Google Scholar] [CrossRef]
- Zhang, P. Modeling and simulation of attitude control of quadrotor aircraft. Electr. Mach. Control. Appl. 2019, 46, 70–74. [Google Scholar]
- Hu, W.; Cao, R.R. An improved PSO algorithm of quadrotor ADRC attitude control. Electron. Control. 2019, 26, 12–16. [Google Scholar]
- Jia, Z.Y.; Liu, Z.L. Quadrotor attitude control algorithm based on reinforcement learning. J. Chin. Comput. Syst. 2021, 10, 2074–2078. [Google Scholar]
- Chen, Z.; Peng, Z.; Zhang, F. Attitude control of coaxial tri-rotor UAV based on linear extended state observer. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 4204–4209. [Google Scholar]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Trans. 2020, 99, 290–304. [Google Scholar] [CrossRef]
- Wu, W.Y.; Zheng, B.C.; Li, H. Attitude controller for quadrotor via active disturbance rejection control and sliding mode control. Electron. Opt. Control. 2022, 29, 93–98. [Google Scholar]
- Wen, S.; Chen, M.Z.; Zeng, Z.; Huang, T.; Li, C. Adaptive neural-fuzzy sliding-mode fault-tolerant control for uncertain nonlinear systems. IEEE Trans. Syst. Man. Cybern. Syst. 2017, 47, 2268–2278. [Google Scholar] [CrossRef]
- Ductian, N.; David, S.; Lahcen, S. Robust self-scheduled fault tolerant control of a quadrotor UAV. IFAC-PapersOaLiae 2017, 50, 5761–5767. [Google Scholar]
- Nian, X.; Chen, W.; Chu, X.; Xu, Z. Robust adaptive fault estimation and fault tolerant control for quadrotor attitude systems. Int. J. Control. 2020, 93, 725–737. [Google Scholar] [CrossRef]
- Zhu, F.L.; Hou, Y.J.; Zhao, X.D. Observer-based fault-tolerant controller design for nonlinear switched systems. Control. Decis. 2017, 32, 1855–1863. [Google Scholar]
- Rudin, K.; Ducard, G.J.J.; Siegwart, R.Y. Active fault toler- ant control with imperfect fault detection information: Applications to UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2792–2805. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R.; Wang, X.; Wang, X. Anti-saturation adaptive finite- time neural network based fault-tolerant tracking control for a quadrotor UAV with external disturbances. Aerosp. Sci. Technol. 2021, 115, 106790. [Google Scholar] [CrossRef]
- Chen, H.; Luo, H.; Huang, B.; Jiang, B.; Kaynak, O. Transfer learning-motivated intelligent fault diagnosis designs: A survey, insights, and perspectives. TechrXiv 2022. [Google Scholar] [CrossRef]
- Hu, Q.; Shao, X.; Guo, L. Adaptive fault-Tolerant attitude tracking control of spacecraft with prescribed performance. IEEE/ASME Trans. Mechatron. 2018, 23, 331–341. [Google Scholar] [CrossRef]
- Nguyen, N.; Krishnakumar, K.; Kaneshige, J.; Nespeca, P. Flight dynamics and hybrid adaptive control of damaged aircraft. J. Guid. Control. Dyn. 2008, 31, 751–764. [Google Scholar] [CrossRef]
- Ge, S.S.; Wang, J. Robust adaptive tracking for time-varying uncertain nonlinear systemswith unknown control coefficients. IEEE Trans. Autom. Control. 2003, 48, 1463–1469. [Google Scholar]
- Guo, X.; Yan, W.; Cui, R. Integral reinforcement learning-based adaptive NN control for continuous-time nonlinear MIMO systems with unknown control directions. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 50, 4068–4077. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Z.; Alippi, C.; Huang, B.; Liu, D. Explainable intelligent fault diagnosis for nonlinear dynamic systems: From unsupervised to supervised learning. IEEE Trans. Neural Netw. Learn. Syst. 2022; early access. [Google Scholar] [CrossRef] [PubMed]
- Zhao, G.L.; Gao, R.S.; Chen, J.N. Adaptive prescribed performance control of quadrotor with unknown actuator fault. Control. Decis. 2021, 36, 2103–2112. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Zou, Z.; Li, Y.; Shi, H.; Fu, Q. Adaptive Fault-Tolerant Tracking Control of Quadrotor UAVs against Uncertainties of Inertial Matrices and State Constraints. Drones 2023, 7, 107. https://doi.org/10.3390/drones7020107
Yang S, Zou Z, Li Y, Shi H, Fu Q. Adaptive Fault-Tolerant Tracking Control of Quadrotor UAVs against Uncertainties of Inertial Matrices and State Constraints. Drones. 2023; 7(2):107. https://doi.org/10.3390/drones7020107
Chicago/Turabian StyleYang, Shuai, Zhihui Zou, Yingchao Li, Haodong Shi, and Qiang Fu. 2023. "Adaptive Fault-Tolerant Tracking Control of Quadrotor UAVs against Uncertainties of Inertial Matrices and State Constraints" Drones 7, no. 2: 107. https://doi.org/10.3390/drones7020107
APA StyleYang, S., Zou, Z., Li, Y., Shi, H., & Fu, Q. (2023). Adaptive Fault-Tolerant Tracking Control of Quadrotor UAVs against Uncertainties of Inertial Matrices and State Constraints. Drones, 7(2), 107. https://doi.org/10.3390/drones7020107