
A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management


Abstract
:1. Introduction
1.1. Challenges in Aquaculture Production, Supervision and Management
1.2. Aquaculture’s Technological Innovation for Precision Farming
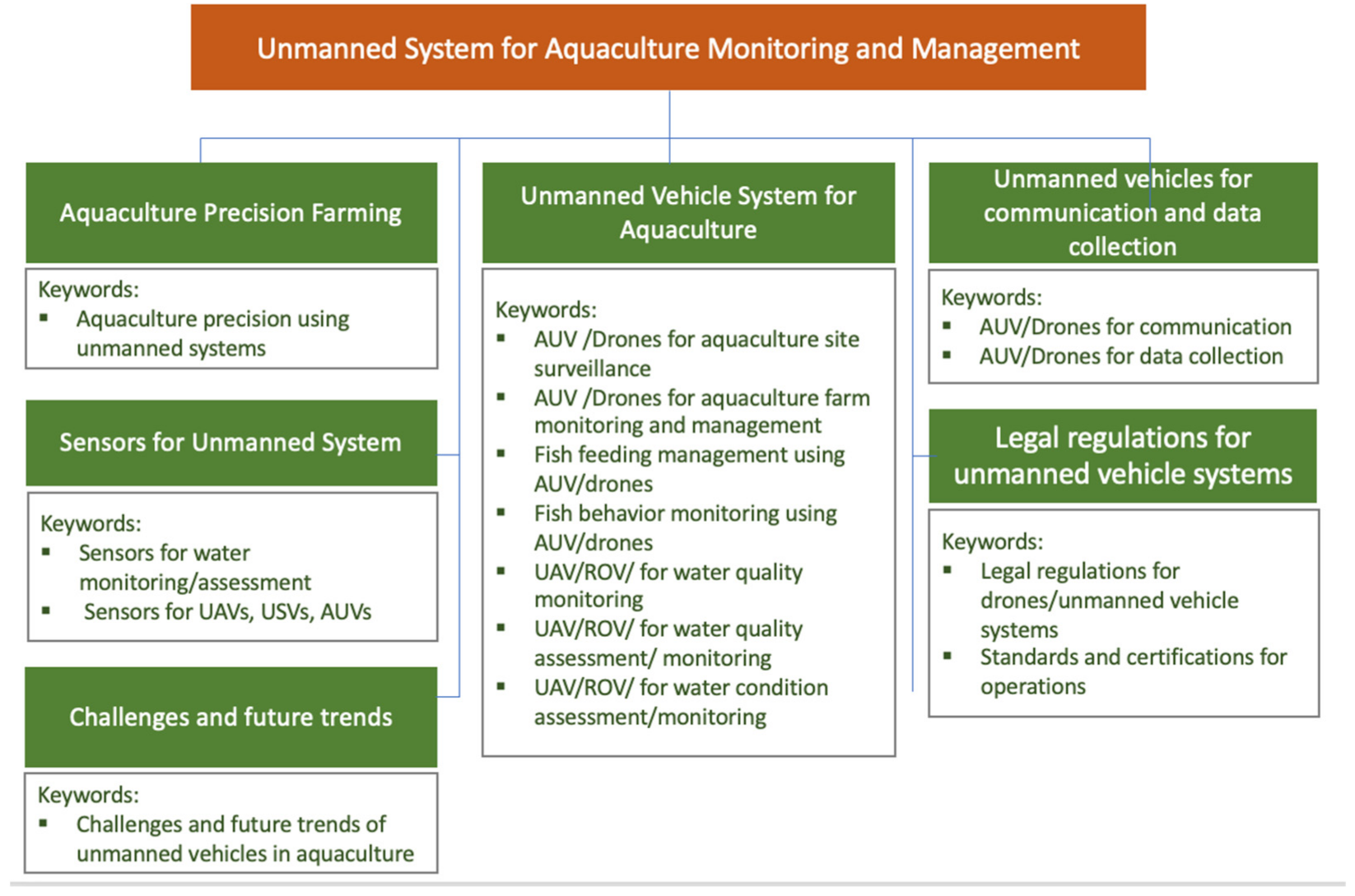
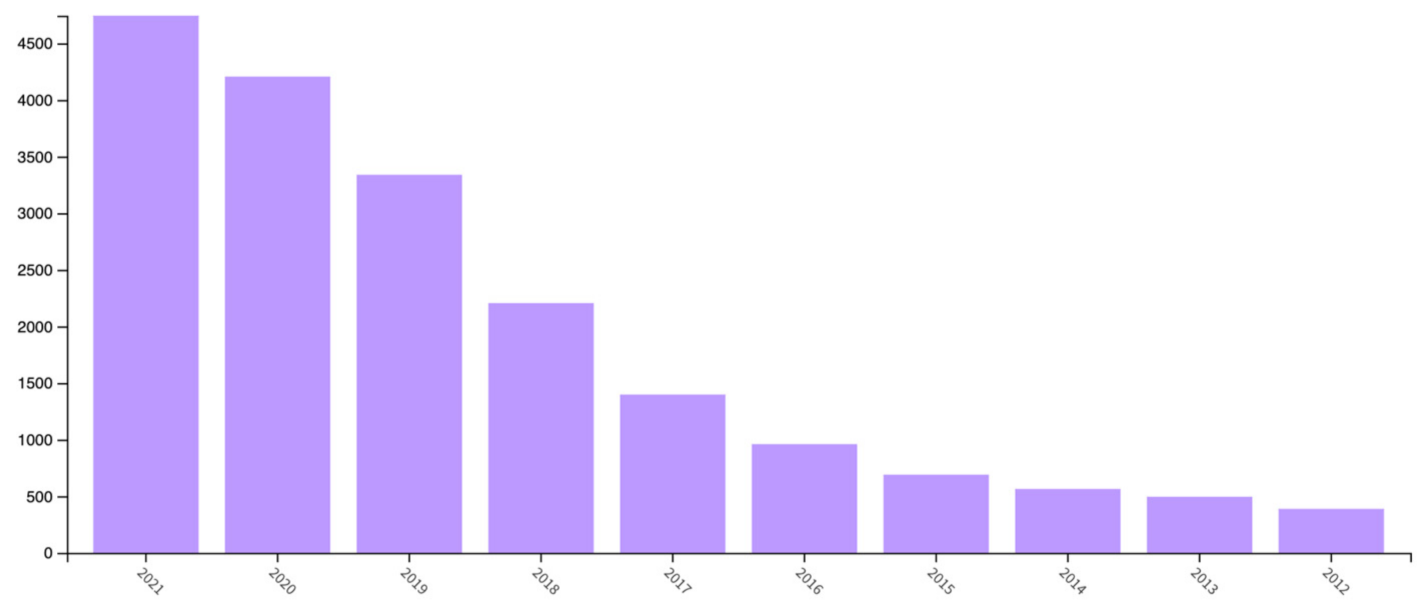
2. Methodology
3. Unmanned Vehicle System Platforms
3.1. Unmanned Aircraft Systems (UAS)
3.2. Autonomous Underwater Vehicles (AUVs)
3.3. Unmanned Surface Vehicles (USVs)
4. Unmanned Vehicles and Sensors
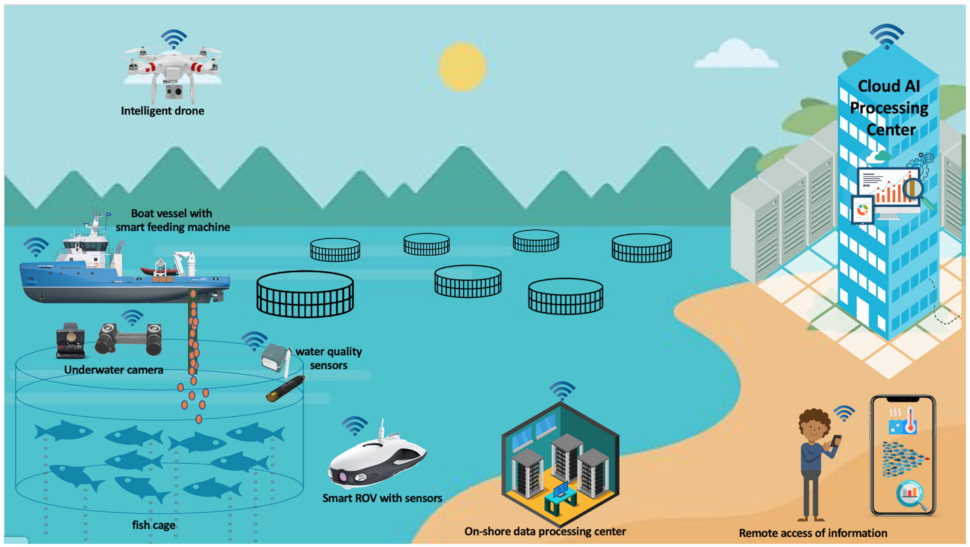
5. Framework of the Aquaculture Monitoring and Management Using Unmanned Vehicles
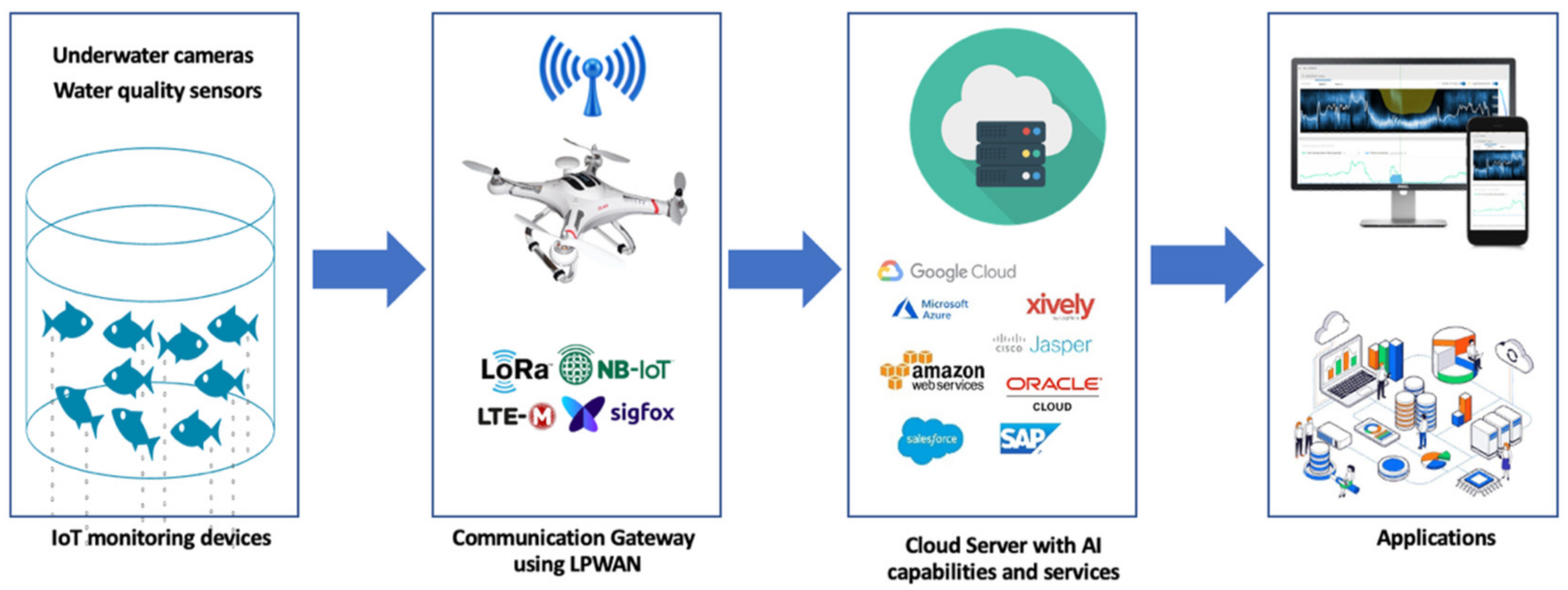
6. Unmanned Vehicles as Communication Gateway and IoT Device Data Collector
7. Aquaculture Site Surveillance Using Unmanned Vehicles
8. Aquaculture Farm Monitoring and Management
8.1. Fish Feed Management
8.2. Fish Behavior Observation
8.3. Water Quality and Pollutants Detection and Assessment
8.4. Water Quality Condition
9. Legal Regulations and Requirements for Unmanned Vehicle Systems
9.1. Standards and Certifications
9.2. Regulations and Legal Issues
10. Challenges and Future Trends
11. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- FAO. The State of World Fisheries and Aquaculture 2020. Sustainability in Action; FAO: Rome, Italy, 2020. [Google Scholar] [CrossRef]
- Ahmed, N.; Thompson, S.; Glaser, M. Global Aquaculture Productivity, Environmental Sustainability, and Climate Change Adaptability. Environ. Manag. 2019, 63, 159–172. [Google Scholar] [CrossRef] [PubMed]
- Grealis, E.; Hynes, S.; ODonoghue, C.; Vega, A.; van Osch, S.; Twomey, C. The economic impact of aquaculture expansion: An input-output approach. Mar. Policy 2017, 81, 29–36. [Google Scholar] [CrossRef]
- Béné, C.; Arthur, R.; Norbury, H.; Allison, E.; Beveridge, M.; Bush, S.; Campling, L.; Leschen, W.; Little, D.; Squires, D.; et al. Contribution of Fisheries and Aquaculture to Food Security and Poverty Reduction: Assessing the Current Evidence. World Dev. 2016, 79, 179–196. [Google Scholar] [CrossRef]
- Kassam, L. Assessing the Contribution of Aquaculture to Poverty Reduction in Ghana. Ph.D. in Development Economics, University of London, London, UK, 2013. [Google Scholar] [CrossRef]
- Genschick, S.; Kaminski, A.; As, K.; Cole, S. Aquaculture in Zambia: An Overview and Evaluation of the Sector’s Responsiveness to the Needs of the Poor; Working Paper: FISH-2017-08; CGIAR Research Program on Fish Agri-Food Systems: Penang, Malysia; Department of Fisheries: Lusaka, Zambia, 2017. [Google Scholar]
- Stevenson, J.; Irz, X. Is Aquaculture Development an Effective Tool for Poverty Alleviation? A Review of Theory and Evidence. Cah. Agric. 2009, 18, 292–299. [Google Scholar] [CrossRef]
- Sribhibhadh, A. Role of Aquaculture in Economic Development Within Southeast Asia. J. Fish. Res. Board Can. 2011, 33, 114. [Google Scholar] [CrossRef]
- FAO. Commercial Aquaculture and Economic Growth, Poverty Alleviation and Food Securi: Assessment Framework. FAO Fisheries and Aquaculture Technical Paper; FAO: Rome, Italy, 2009; ISBN 9251063370. [Google Scholar]
- Shamsuzzaman, M.M.; Mozumder, M.; Mitu, S.; Ahamad, A.; Bhyuian, S. The economic contribution of fish and fish trade in Bangladesh. Aquac. Fish. 2020, 5, 174–181. [Google Scholar] [CrossRef]
- Jennings, S.; Stentiford, G.; Leocadio, A.; Jeffery, K.; Metcalfe, J.; Katsiadaki, I.; Auchterlonie, N.; Mangi, S.; Pinnegar, J.; Ellis, T.; et al. Aquatic food security: Insights into challenges and solutions from an analysis of interactions between fisheries, aquaculture, food safety, human health, fish and human welfare, economy and environment. Fish Fish. 2016, 17, 893–938. [Google Scholar] [CrossRef] [Green Version]
- Pradeepkiran, J.A. Aquaculture role in global food security with nutritional value: A review. Transl. Anim. Sci. 2019, 3, 903–910. [Google Scholar] [CrossRef] [Green Version]
- Frankic, A.; Hershner, C. Sustainable aquaculture: Developing the promise of aquaculture. Aquac. Int. 2003, 11, 517–530. [Google Scholar] [CrossRef]
- FAO. Report of the Consultation on the Application of Article 9 of the FAO Code of Conduct for Responsible Fisheries in the Mediterranean Region; FAO: Rome, Italy, 1999. [Google Scholar]
- Gaertner-Mazouni, N.; De Wit, R. Exploring new issues for coastal lagoons monitoring and management. Estuar. Coast. Shelf Sci. 2012, 114, 1–6. [Google Scholar] [CrossRef]
- Perez-Ruzafa, A.; Marcos, C. Fisheries in coastal lagoons: An assumed but poorly researched aspect of the ecology and functioning of coastal lagoons. Estuar. Coast. Shelf Sci. 2012, 110, 15–31. [Google Scholar] [CrossRef]
- Aliaume, C.; Chi, D.; Viaroli, T.; Zaldívar, P. Coastal lagoons of Southern Europe: Recent changes and future scenarios. Transit. Waters Monogr. 2007, 1, 1–12. [Google Scholar] [CrossRef]
- Yin, G.; Ong, M.; Lee, J.; Kim, T. Numerical simulation of oxygen transport in land-based aquaculture tank. Aquaculture 2021, 543, 736973. [Google Scholar] [CrossRef]
- Fiander, L.; Graham, M.; Murray, H.; Boileau, R. Land based multi-trophic aquaculture research at the wave energy research centre. Available online: https://nrc-publications.canada.ca/fra/voir/objet/?id=543d494b-95b1-4c30-ab48-7463b14e29ab (accessed on 2 November 2021).
- Benetti, D.; Benetti, G.; Rivera, J.; Sardenberg, B.; O’Hanlon, B. Site Selection Criteria for Open Ocean Aquaculture. Mar. Technol. Soc. J. 2010, 44, 22–35. [Google Scholar] [CrossRef]
- Naylor, R.L.; Hardy, R.W.; Buschmann, A.H.; Bush, S.R.; Cao, L.; Klinger, D.H.; Little, D.C.; Lubchenco, J.; Shumway, S.E.; Troell, M. A 20-year retrospective review of global aquaculture. Nature 2021, 591, 551–563. [Google Scholar] [CrossRef]
- Baki, B.; Yucel, Ş. Feed cost/production income analysis of seabass (Dicentrarchus labrax) aquaculture. Int. J. Ecosyst. Ecol. Sci. 2017, 7, 859–864. [Google Scholar]
- Bjelland, H.A.; Føre, M.; Lader, P.; Kristiansen, D.; Holmen, I.; Fredheim, A.; Grøtli, E.; Fathi, D.; Oppedal, F.; Utne, I.; et al. Exposed Aquaculture in Norway. In Proceedings of the Oceans 2015 MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–10. [Google Scholar] [CrossRef]
- FAO. FAO Training Series: Simple Methods for Aquaculture. Available online: https://www.fao.org/fishery/docs/CDrom/FAO_Training/FAOTraining/General/f1e.htm (accessed on 2 November 2021).
- Wang, C.; Li, Z.; Wang, T.; Xu, X.; Zhang, X.; Li, D. Intelligent fish farm—The future of aquaculture. Aquacult. Int. 2021, 29, 2681–2711. [Google Scholar] [CrossRef] [PubMed]
- Ubina, N.; Cheng, S.C.; Chang, C.C.; Chen, H.Y. Evaluating fish feeding intensity in aquaculture with convolutional neural networks. Aquac. Eng. 2021, 94, 102178. [Google Scholar] [CrossRef]
- Joffre, O.; Klerkx, L.; Dickson, M.; Verdegem, M. How is innovation in aquaculture conceptualized and managed? A systematic literature review and reflection framework to inform analysis and action. Aquaculture 2017, 470, 128–148. [Google Scholar] [CrossRef]
- Yang, X.; Song, Z.; Liu, J.; Gao, Q.; Dong, S.; Zhou, C. Deep learning for smart fish farming: Applications, opportunities and challenges. Rev. Aquac. 2020, 13, 12464. [Google Scholar] [CrossRef]
- Cai, Y.-E.; Juang, J.-G. Path planning and obstacle avoidance of UAV for cage culture inspection. J. Mar. Sci. Technol. 2020, 28, 14. [Google Scholar] [CrossRef]
- Ubina, N.A.; Cheng, S.-C.; Chen, H.-Y.; Chang, C.-C.; Lan, H.-Y. A Visual Aquaculture System Using a Cloud-Based Autonomous Drones. Drones 2021, 5, 109. [Google Scholar] [CrossRef]
- Føre, M.; Frank, K.; Norton, T.; Svendsen, E.; Alfredsen, J.A.; Dempsterd, T.; Eguiraun, H.; Watsong, W.; Stahlb, A.; Sundea, L.M.; et al. Precision fish farming: A new framework to improve production in aquaculture. Biosyst. Eng. 2018, 173, 176–193. [Google Scholar] [CrossRef]
- O’Donncha, F.; Grant, J. Precision Aquaculture. IEEE Internet Things Mag. 2019, 2, 26–30. [Google Scholar] [CrossRef]
- Murugan, D.; Garg, A.; Singh, D. Development of an Adaptive Approach for Precision Agriculture Monitoring with Drone and Satellite Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5322–5328. [Google Scholar] [CrossRef]
- Krishna, K.R. Agricultural Drones, A Peaceful Pursuit, 1st ed.; Apple Academic Press, Inc.: Palm Bay, FL, USA, 2021; ISBN 97801077188-595-0. [Google Scholar]
- Ko, Y.; Kim, J.; Duguma, D.G.; Astillo, P.V.; You, I.; Pau, G. Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Sensors 2021, 21, 2057. [Google Scholar] [CrossRef] [PubMed]
- Choudhary, G.; Sharma, V.; You, I. Sustainable and secure trajectories for the military Internet of Drones (IoD) through an efficient Medium Access Control (MAC) protocol. Comput. Electr. Eng. 2019, 74, 59–73. [Google Scholar] [CrossRef]
- Liu, C.-C.; Chen, J.-J. Analysis of the Weights of Service Quality Indicators for Drone Filming and Photography by the Fuzzy Analytic Network Process. Appl. Sci. 2019, 9, 1236. [Google Scholar] [CrossRef] [Green Version]
- Cokyasar, T. Optimization of battery swapping infrastructure for e-commerce drone delivery. Comput. Commun. 2021, 168, 146–154. [Google Scholar] [CrossRef]
- Wang, D.; Hu, P.; Du, J.; Zhou, P.; Deng, T.; Hu, M. Routing and Scheduling for Hybrid Truck-Drone Collaborative Parcel Delivery With Independent and Truck-Carried Drones. IEEE Internet Things J. 2019, 6, 10483–10495. [Google Scholar] [CrossRef]
- Rahman, M.S.; Khalil, I.; Atiquzzaman, M. Blockchain-Powered Policy Enforcement for Ensuring Flight Compliance in Drone-Based Service Systems. IEEE Netw. 2021, 35, 116–123. [Google Scholar] [CrossRef]
- Pan, Q.; Wen, X.; Lu, Z.; Li, L.; Jing, W. Dynamic Speed Control of Unmanned Aerial Vehicles for Data Collection under Internet of Things. Sensors 2018, 18, 3951. [Google Scholar] [CrossRef] [Green Version]
- Yao, J.; Ansari, N. QoS-Aware Power Control in Internet of Drones for Data Collection Service. IEEE Trans. Veh. Technol. 2019, 68, 6649–6656. [Google Scholar] [CrossRef]
- Kurt, A.; Saputro, N.; Akkaya, K.; Uluagac, A.S. Distributed Connectivity Maintenance in Swarm of Drones During Post-Disaster Transportation Applications. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6061–6073. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q. Unmanned Aerial Vehicles in Smart Agriculture: Applications, Requirements, and Challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Avanzato, R.; Beritelli, F. An Innovative Technique for Identification of Missing Persons in Natural Disaster Based on Drone-Femtocell Systems. Sensors 2019, 19, 4547. [Google Scholar] [CrossRef] [Green Version]
- de Lima, R.L.P.; Paxinou, K.; Boogaard, C.F.; Akkerman, O.; Lin, F.-Y. In-Situ Water Quality Observations under a Large-Scale Floating Solar Farm Using Sensors and Underwater Drones. Sustainability 2021, 13, 6421. [Google Scholar] [CrossRef]
- Chang, C.C.; Wang, J.H.; Wu, J.L.; Hsieh, Y.Z.; Wu, T.D.; Cheng, S.C.; Chang, C.C.; Juang, J.G.; Liou, C.H.; Hsu, T.H.; et al. Applying Artificial Intelligence (AI) Techniques to Implement a Practical Smart Cage Aquaculture Management System. J. Med. Biol. Eng. 2021, 41, 652–658. [Google Scholar] [CrossRef]
- Verfuß, U.K.; Aniceto, A.S.; Harris, D.V.; Gillespie, D.; Fielding, S.; Jiménez, G.; Johnston, P.F.; Sinclair, R.R.; Sivertsen, A.; Solbo, S.; et al. A review of unmanned vehicles for the detection and monitoring of marine fauna. Mar. Pollut. Bull. 2019, 140, 17–29. [Google Scholar] [CrossRef]
- Nicholls, R.; Ryan, J.; Mumm, H.; Lonstein, W.; Carter, C.; Shay, J.; Mai, R.; Hood, J.-P.; Jackson, M. Unmanned Vehicle Systems and Operations on Air, Sea and Land; New Prairie Press (Kansas State University): Manhattan, KS, USA, 2020; ISBN 978-1-944548-30-8. [Google Scholar]
- Verfuss, U.K.; Aniceto, A.S.; Biuw, M.; Fielding, S.; Gillespie, D.; Harris, D.; Jimenez, G.; Johnston, P.; Plunkett, R.; Sivertsen, A.; et al. Wyatt Literature Review: Understanding the Current State of Autonomous Technologies to Improve/Expand Observation and Detection of Marine Species. Available online: https://fdocuments.in/document/literature-review-understanding-the-current-state-literature-review-understanding.html (accessed on 2 December 2021).
- Jones, G.P.; Pearlstine, L.G.; Percival, H.F. An assessment of small unmanned aerial vehicles for wildlife research. Wildl. Soc. Bull. 2006, 34, 750–758. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Goden, B.; Pesch, E. Optimization approaches for civil applicates of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Proactive Deployment of Aerial Drones for Coverage over Very Uneven Terrains: A Version of the 3D Art Gallery Problem. Sensors 2019, 19, 1438. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Watts, A.; Perry, J.; Smith, S.; Burgess, M.; Wilkinson, B.; Szantoi, Z.; Ifju, P.; Percival, H. Small Unmanned Aircraft Systems for Low-Altitude Aerial Surveys. J. Wildl. Manag. 2010, 74, 1614–1619. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Johnston, D. Unoccupied Aircraft Systems in Marine Science and Conservation. Annu. Rev. Mar. Sci. 2019, 11, 439–463. [Google Scholar] [CrossRef] [Green Version]
- Klaer, P.; Huang, A.; Sévigny, P.; Rajan, S.; Pant, S.; Patnaik, P.; Balaji, B. An Investigation of Rotary Drone HERM Line Spectrum under Manoeuvering Conditions. Sensors 2020, 20, 5940. [Google Scholar] [CrossRef] [PubMed]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Panda, J.P.; Mitra, A.; Warrior, H.V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2020, 235, 15–29. [Google Scholar] [CrossRef]
- Niu, H.; Adams, S.; Lee, K.; Husain, T.; Bose, N. Applications of Autonomous Underwater Vehicles in Offshore Petroleum Industry Environmental Effects Monitoring. J. Can. Pet. Technol. 2007, 48, 12–16. [Google Scholar] [CrossRef]
- Bahr, A.; Leonard, J.J.; Fallon, M.F. Cooperative Localization for Autonomous Underwater Vehicles. Int. J. Robot. Res. 2009, 28, 714–728. [Google Scholar] [CrossRef]
- Jung, J.; Park, J.; Choi, J.; Choi, H. Autonomous Mapping of Underwater Magnetic Fields Using a Surface Vehicle. IEEE Access 2018, 6, 62552–62563. [Google Scholar] [CrossRef]
- González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cabello, J.A.E. Autonomous Underwater Vehicles: Localization, Navigation, and Communication for Collaborative Missions. Appl. Sci. 2020, 10, 1256. [Google Scholar] [CrossRef] [Green Version]
- Bernalte Sánche, P.; Papaelias, M.; García Márquez, F.P. Autonomous underwater vehicles: Instrumentation and measurements. IEEE Instrum. Meas. Mag. 2020, 23, 105–114. [Google Scholar] [CrossRef]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec, QC, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Zhu, M.; Wen, Y.-Q. Design and Analysis of Collaborative Unmanned Surface-Aerial Vehicle Cruise Systems. J. Adv. Transp. 2019, 2019, 1323105. [Google Scholar] [CrossRef]
- Ma, S.; Guo, W.; Song, R.; Liu, Y. Unsupervised learning based coordinated multi-task allocation for unmanned surface vehicles. Neurocomputing 2021, 420, 227–245. [Google Scholar] [CrossRef]
- Breivik, M.; Hovstein, V.; Fossen, T. Straight-Line Target Tracking for Unmanned Surface Vehicles. Model. Identif. Control. 2008, 29, 131–149. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Wu, X.; Shen, W.; Tong, W.; Guo, S. Collaboration of Heterogeneous Unmanned Vehicles for Smart Cities. IEEE Netw. 2019, 33, 133–137. [Google Scholar] [CrossRef]
- Yeong, D.J.; Velasco-Hernandez, G.; Barry, J.; Walsh, J. Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef]
- Balestrieri, E.; Daponte, P.; De Vito, L.; Lamonaca, F. Sensors and Measurements for Unmanned Systems: An Overview. Sensors 2021, 21, 1518. [Google Scholar] [CrossRef]
- Martin, B.; Tarraf, D.; Whitmore, T.; Deweese, J.; Kenney, C.; Schmid, J.; DeLuca, P. Advancing Autonomous Systems: An Analysis of Current and Future Technology for Unmanned Maritime Vehicles; RAND Corporation: Santa Monica, CA, USA, 2019. [Google Scholar]
- Molina, P.; Fortuny, P.; Colomina, I.; Remy, M.; Camara de Macedo, K.; Zúnigo, Y.; Vaz, E.; Luebeck, D.; Moreira, J.; Blázquez, M. Navigation and remote sensing payloads and methods of the SARVANT unmanned aerial system. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 11, 275–280. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Wang, S.; McDonald-Maier, K.; Hu, H. Towards autonomous localization and mapping of AUVs: A survey. Int. J. Intell. Unmanned Syst. 2013, 1, 97–120. [Google Scholar] [CrossRef] [Green Version]
- Kapoor, R.; Ramasamy, S.; Gardi, A.; Schyndel, R.V.; Sabatini, R. Acoustic Sensors for Air and Surface Navigation Applications. Sensors 2018, 18, 499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kapoor, R.; Gardi, A.; Sabatini, R. Network Optimisation and Performance Analysis of a Multistatic Acoustic Navigation Sensor. Sensors 2020, 20, 5718. [Google Scholar] [CrossRef]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. Improving Human Action Recognition Using Fusion of Depth Camera and Inertial Sensors. IEEE Trans. Hum. Mach. Syst. 2015, 45, 51–61. [Google Scholar] [CrossRef]
- Jung, J.; Lee, J.Y.; Jeong, Y.; Kweon, I.S. Time-of-Flight Sensor Calibration for a Color and Depth Camera Pai. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1501–1513. [Google Scholar] [CrossRef]
- Araguás, G.; Paz, C.; Gaydou, D.; Paina, G.P. Quaternion-based Orientation Estimation Fusing a Camera and Inertial Sensors for a Hovering UAV. J. Intell. Robot. Syst. 2015, 77, 37–53. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, R.; Wang, Z.; Guan, L.; Li, B.; Chu, J. Integrated polarization-dependent sensor for autonomous navigation. J. Micro/Nanolithogr. MEMS MOEMS 2015, 14, 015001. [Google Scholar] [CrossRef]
- Li, S.; Liu, Z. Autonomous navigation and guidance scheme for precise and safe planetary landing. Aircr. Eng. Aerosp. Technol. 2019, 81, 516–521. [Google Scholar] [CrossRef] [Green Version]
- Liu, O.; Yuan, S.; Li, Z. A Survey on Sensor Technologies for Unmanned Ground Vehicles. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 638–645. [Google Scholar] [CrossRef]
- Qiu, R.; Wei, S.; Zhang, M.; Li, H.; Sun, H.; Liu, G.; Li, M. Sensors for measuring plant phenotyping: A review. Int. J. Agric. Biol. Eng. 2018, 11, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Saberioon, M.; Gholizadeh, A.; Cisar, P.; Pautsina, A.; Urban, J. Application of Machine Vision Systems in Aquaculture with Emphasis on Fish: State-of-the-Art and Key Issues. Rev. Aquac. 2017, 9, 369–387. [Google Scholar] [CrossRef]
- Furukawa, F.; Laneng, L.A.; Ando, H.; Yoshimura, N.; Kaneko, M.; Morimoto, J. Comparison of RGB and Multispectral Unmanned Aerial Vehicle for Monitoring Vegetation Coverage Changes on a Landslide Area. Drones 2021, 5, 97. [Google Scholar] [CrossRef]
- Ferrete Ribeiro, N.; Santos, C. Inertial measurement units: A brief state of the art on gait analysis. In Proceedings of the 2017 IEEE 5th Portuguese Meeting on Bioengineering, University of Coimbra, Coimbra, Portugal, 16–18 February 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Kumar, D.; Singh, R.; Kaur, R. Global Positioning System. In Spatial Information Technology for Sustainable Development Goals; Sustainable Goals Series; Springer International Publishing AG: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef] [Green Version]
- Kruse, P. Review on water quality sensors. J. Phys. D Appl. Phys. 2018, 51, 203002. [Google Scholar] [CrossRef] [Green Version]
- Bhardwaj, J.; Gupta, K.K.; Gupta, R. A review of emerging trends on water quality measurement sensors. In Proceedings of the 2015 International Conference on Technologies for Sustainable Development (ICTSD), Mumbai, India, 4–6 February 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Parra, L.; Lloret, G.; Lloret, J.; Rodilla, M. Physical Sensors for Precision Aquaculture: A Review. IEEE Sens. J. 2018, 18, 3915–3923. [Google Scholar] [CrossRef] [Green Version]
- O’Donncha, F.; Stockwell, C.L.; Planellas, S.R.; Micallef, G.; Palmes, P.; Webb, C.; Filgueira, R.; Grant, J. Data Driven Insight Into Fish Behaviour and Their Use for Precision Aquaculture. Front. Anim. Sci. 2021, 2, 695054. [Google Scholar] [CrossRef]
- Moheddine, A.; Patrone, F.; Marchese, M. UAV and IoT Integration: A Flying Gateway. In Proceedings of the 26th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Genova, Italy, 27–29 November 2019; pp. 121–122. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV based IoT platform: A crowd surveillance use case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef] [Green Version]
- Qazi, S.; Siddiqui, A.S.; Wagan, A.I. UAV based real time video surveillance over 4G LTE. In Proceedings of the 2015 International Conference on OpenSource Systems & Technologies (ICOSST), Lahore, Pakistan, 17–19 December 2015; pp. 141–145. [Google Scholar] [CrossRef]
- Min, H.; Jung, J.; Kim, B.; Hong, J.; Heo, J. Dynamic Rendezvous Node Estimation for Reliable Data Collection of a Drone as a Mobile IoT Gateway. IEEE Access 2019, 7, 184285–184293. [Google Scholar] [CrossRef]
- Ytrestøyl, T.; Takle, H.; Kolarevic, J.; Calabrese, S.; Timmerhaus, G.; Rosseland, B.O.; Teien, H.C.; Nilsen, T.O.; Handeland, S.O.; Stefansson, S.O.; et al. Performance and welfare of Atlantic salmon (Salmo salar) post-smolts in RAS; importance of salinity and water velocity. J. World Aquac. Soc. 2020, 51, 12682. [Google Scholar] [CrossRef] [Green Version]
- Detertm, M.; Weitbrecht, V. A low-cost airborne velocimetry system: Proof of concept. J. Hydraul. Res. 2015, 53, 532–539. [Google Scholar] [CrossRef]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A Comprehensive Survey on UAV Communication Channel Modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Behjati, M.; Mohd Noh, A.B.; Alobaidy, H.A.H.; Zulkifley, M.A.; Nordin, R.; Abdullah, N.F. LoRa Communications as an Enabler for Internet of Drones towards Large-Scale Livestock Monitoring in Rural Farms. Sensors 2021, 21, 5044. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Iborra, R.; Sanchez-Gomez, J.; Ballesta-Viñas, J.; Cano, M.-D.; Skarmeta, A.F. Performance Evaluation of LoRa Considering Scenario Conditions. Sensors 2018, 18, 772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rompagroup. Internet of Things Part 3: LPWAN Technogies. Available online: https://www.rompagroup.com/news/internet-of-things-part-3-lpwan-technologies.aspx (accessed on 28 November 2021).
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Digi. A Comparison of LPWAN Technologies. Available online: https://www.digi.com/blog/post/lpwan-technology-comparison (accessed on 28 November 2021).
- Sharma, A.; Vanjani, P.; Paliwal, N.; Wijerathn Basnayaka, C.M.; Jayakody, D.N.; Wang, H.-C.; Muthuchidambaranathan, P. Communication and Networking Technologies for UAVs: A Survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Niu, B.; Li, G.; Peng, F.; Wu, J.; Zhang, L.; Li, Z. Survey of Fish Behavior Analysis by Computer Vision. J. Aquac. Res. Dev. 2018, 9, 1000534. [Google Scholar] [CrossRef]
- Manna, D.; Maiti, A.; Samanta, G.P. Analysis of a predator-prey model for exploited fish populations with schooling behavior. J. Appl. Math. Comput. 2018, 317, 35–48. [Google Scholar] [CrossRef]
- Banerjee, S.; Alvey, L.; Brown, P.; Yue, S. An assistive computer vision tool to automatically detect changes in fish behavior in response to ambient odor. Sci. Rep. 2021, 11, 1002. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Liu, Y.; Cui, S.; Miao, X. Behavioral responses of tilapia (Oreochromis niloticus) to acute fluctuations in dissolved oxygen levels as monitored by computer vision. Aquac. Eng. 2006, 35, 207–217. [Google Scholar] [CrossRef]
- Pinkiewicz, T.; Purser, J.; Williams, R.N. A computer vision system to analyse the swimming behaviour of farmed fish in commercial aquaculture facilities: A case study using cage-held Atlantic salmon. Aquac. Eng. 2011, 45, 20–27. [Google Scholar] [CrossRef]
- Zhao, J.; Bao, W.; Zhang, F.; Ye, Z.; Liu, Y.; Shen, M.; Zhu, S. Assessing appetite of the swimming fish based on spontaneous collective behaviors in a recirculating aquaculture system. Aquac. Eng. 2017, 78, 118–124. [Google Scholar] [CrossRef]
- Jakka, N.; Rao, T.; Rao, J. Locomotor Behavioral Response of Mosquitofish (Gambusia affinis) to Subacute Mercury Stress Monitored by Video Tracking System. Drug Chem. Toxicol. 2007, 30, 383–397. [Google Scholar] [CrossRef] [PubMed]
- Israeli, D.; Kimmel, E. Monitoring the behavior of hypoxia-stressed Carassius auratus using computer vision. Aquac. Eng. 1996, 16, 423–440. [Google Scholar] [CrossRef]
- Kane, A.S.; Salierno, J.D.; Gipson, G.T.; Molteno, T.C.A.; Hunter, C. A video-based movement analysis system to quantify behavioral stress responses of fish. Water Res. 2004, 38, 3993–4001. [Google Scholar] [CrossRef]
- Ben-Simon, A.; Ben-Shahar, O.; Segev, R. Measuring and tracking eye movements of a behaving archer fish by real-time stereo vision. J. Neurosci. Meth. 2009, 184, 235–243. [Google Scholar] [CrossRef] [PubMed]
- AlZubi, H.; Al-Nuaimy, W.; Buckley, J.; Sneddon, L.; Young, I. Real-time 3D fish tracking and behaviour analysis. In Proceedings of the 2015 IEEE Jordan Conference on Applied Electrical Engineering and Computing Technologies (AEECT), Amman, Jordan, 3–5 November 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Ziyi, L.; Xian, L.; Liangzhong, F.; Huanda, L.; Li, L.; Ying, L. Measuring feeding activity of fish in RAS using computer vision. Aquac. Eng. 2014, 60, 20–27. [Google Scholar] [CrossRef]
- Wang, G.; Muhammad, A.; Liu, C.; Du, L.; Li, D. Automatic Recognition of Fish Behavior with a Fusion of RGB and Optical Flow Data Based on Deep Learning. Animals 2021, 11, 2774. [Google Scholar] [CrossRef]
- Parsonage, K.D.; Petrell, R.J. Accuracy of a machine-vision pellet detection system. Aquac. Eng. 2003, 29, 109–123. [Google Scholar] [CrossRef]
- Skøien, K.; Alver, M.; Zolich, A.; Alfredsen, J.A. Feed spreaders in sea cage aquaculture—Motion characterization and measurement of spatial pellet distribution using an unmanned aerial vehicle. Comput. Electron. Agric. 2016, 129, 27–36. [Google Scholar] [CrossRef] [Green Version]
- Difford, G.F.; Boison, S.A.; Khaw, H.L.; Gjerde, B. Validating non-invasive growth measurements on individual Atlantic salmon in sea cages using diode frames. Comput. Electron. Agric. 2020, 173, 105411. [Google Scholar] [CrossRef]
- Azzaydi, M.; Madrid, J.A.; Zamora, S.; Sánchez-Vázquez, F.J.; Mart Nez, F.J. Effect of three feeding strategies (automatic, ad libitum demand-feeding and time-restricted demand-feeding) on feeding rhythms and growth in European sea bass (Dicentrarchus labrax L). Aquaculture 1998, 163, 285–296. [Google Scholar] [CrossRef]
- Ditria, E.M.; Lopez-Marcano, S.; Sievers, M.; Jinks, E.L.; Brown, C.J.; Connolly, R.M. Automating the Analysis of Fish Abundance Using Object Detection: Optimizing Animal Ecology with Deep Learning. Front. Mar. Sci. 2020. [Google Scholar] [CrossRef]
- Connolly, R.; Fairclough, D.; Jinks, E.; Ditria, E.; Jackson, G.; Lopez-Marcano, S.; Olds, A.; Jinks, K. Improved accuracy for automated counting of a fish in baited underwater videos for stock assessment. Front. Mar. Sci. 2021, 8, 1511. [Google Scholar] [CrossRef]
- Fan, L.; Liu, Y. Automate fry counting using computer vision and multi-class least squares support vector machine. Aquaculture 2013, 380–383, 91–98. [Google Scholar] [CrossRef]
- Almansa, C.; Reig, L.; Oca, J. The laser scanner is a reliable method to estimate the biomass of a Senegalese sole (Solea senegalensis) population in a tank. Aquac. Eng. 2015, 69, 78–83. [Google Scholar] [CrossRef] [Green Version]
- Gümüş, E.; Yılayaz, A.; Kanyılmaz, M.; Gümüş, B.; Balaban, M.O. Evaluation of body weight and color of cultured European catfish (Silurus glanis) and African catfish (Clarias gariepinus) using image analysis. Aquac. Eng. 2021, 93. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, J.; Duan, Q. Estimation for fish mass using image analysis and neural network. Comput. Electron. Agric. 2020, 173, 105439. [Google Scholar] [CrossRef]
- Costa, C.; Antonucci, F.; Boglione, C.; Menesatti, P.; Vandeputte, M.; Chatain, B. Automated sorting for size, sex and skeletal anomalies of cultured seabass using external shape analysis. Aquac. Eng. 2013, 52, 58–64. [Google Scholar] [CrossRef]
- Shieh, A.; Petrell, R.J. Measurement of fish size in atlantic salmon (Salmo salar l.) cages using stereographic video techniques. Aquac. Eng. 1998, 17, 29–43. [Google Scholar] [CrossRef]
- Måløy, H.; Aamodt, A.; Misimi, E. A spatio-temporal recurrent network for salmon feeding action recognition from underwater videos in aquaculture. Comput. Electron. Agric. 2019, 167, 105087. [Google Scholar] [CrossRef]
- Lopez-Marcano, S.; Jinks, L.E.; Buelow, C.A.; Brown, C.J.; Wang, D.; Kusy, B.; Ditria, E.M.; Connolly, R.M. Automatic detection of fish and tracking of movement for ecology. Ecol. Evol. 2021, 11, 8254–8263. [Google Scholar] [CrossRef]
- Provost, E.J.; Butcher, P.A.; Coleman, M.A.; Bloom, D.; Kelaher, B.P. Aerial drone technology can assist compliance of trap fisheries. Fish. Manag. Ecol. 2020, 27, 12420. [Google Scholar] [CrossRef]
- Bloom, D.; Butcher, P.A.; Colefax, A.P.; Provost, E.J.; Cullis, B.R.; Kelaher, B.P. Drones detect illegal and derelict crab traps in a shallow water estuary. Fish. Manag. Ecol. 2019, 26, 311–318. [Google Scholar] [CrossRef]
- Wong, P.; Nguyen, D.; Abukmail, A.; Brown, R.; Ryan, R.; Pagnutti, M. Low Cost Unmanned Aerial Vehicle Monitoring Using Smart Phone Technology. In Proceedings of the 2015 12th International Conference on Information Technology—New Generations, Las Vegas, NV, USA, 13–15 April 2015; pp. 286–291. [Google Scholar] [CrossRef]
- Saska, M.; Krajník, T.; Faigl, J.; Vonásek, V.; Přeučil, L. Low-cost MAV platform AR-drone in experimental verifications of methods for vision based autonomous navigation. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 4808–4809. [Google Scholar] [CrossRef]
- Toonen, H.M.; Bush, S.R. The digital frontiers of fisheries governance: Fish attraction devices, drones and satellites. J. Environ. Policy Plan. 2018, 22, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Gallego, A.-J.; Pertusa, A.; Gil, P. Automatic Ship Classification from Optical Aerial Images with Convolutional Neural Networks. Remote Sens. 2018, 10, 511. [Google Scholar] [CrossRef] [Green Version]
- Marques, J.S.; Bernardino, A.; Cruz, G.; Bento, M. An algorithm for the detection of vessels in aerial images. In 2014 Proceedings of the 11th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Seoul, Korea, 26–29 October 2014; pp. 295–300. [Google Scholar] [CrossRef]
- Prayudi, A.; Sulistijono, I.A.; Risnumawan, A.; Darojah, Z. Surveillance System for Illegal Fishing Prevention on UAV Imagery Using Computer Vision. In Proceedings of the 2020 International Electronics Symposium (IES), Surabaya, Indonesia, 29–30 September 2020; pp. 385–391. [Google Scholar] [CrossRef]
- Jossart, J.; Theuerkauf, S.J.; Wickliffe, L.C.; Morris, J.A., Jr. Applications of Spatial Autocorrelation Analyses for Marine Aquaculture Siting. Front. Mar. Sci. 2020, 6, 806. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Madawalagama, S.; Munasinghe, N.; Dampegama, S.; Samarakoon, L. Low-cost aerial mapping with consumer-grade drones. In Proceedings of the 37th Asian Conference on Remote Sensing, Colombo, Sri Lanka, 17–21 October 2016. [Google Scholar]
- Zongijan, L. UAV for mapping—Low altitude photogrammetric survey. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1183–1186. [Google Scholar]
- Chen, H.-Y.; Cheng, S.-C.; Chang, C.-C. Semantic scene modeling for aquaculture management using an autonomous drone. In Proceedings of the International Workshop on Advanced Imaging Technologies 2020 (IWAIT 2020), Yogyakarta, Indonesia, 5–7 January 2020; Volume 11515, p. 18. [Google Scholar] [CrossRef]
- Chen, C.-X.; Juang, J.-G. Vision Based Target Recognition for Cage Aquaculture Detection. J. Mar. Sci. Technol. 2020, 28, 2. [Google Scholar] [CrossRef]
- Shelby, K.; Staci, L. WDFW to Use Drone to Count Spawning of Salmon Nests. 2020. Available online: https://wdfw.wa.gov/news/wdfw-use-drone-count-spawning-salmon-nests-0 (accessed on 15 November 2021).
- Yamamoto, I.; Morinaga, A.; Lawn, M. Agile ROV for underwater surveillance. J. Mar. Sci. Technol. 2020, 28, 3. [Google Scholar] [CrossRef]
- Gou, H.-Y. Drone Applications in Farming Management in Taiwan. Food and Fertilizer Technology Center for the Asian and Pacific Region. Available online: https://ap.fftc.org.tw/article/1640 (accessed on 22 November 2021).
- Ahilan, T.; Adityan, V.A.; Kailash, S. Efficient Utilization of Unmanned Aerial Vehicle (UAV) for Fishing through Surveillance for Fishermen. Int. J. Aerosp. Mec. Eng. 2015, 9, 1468–1471. [Google Scholar]
- Robertis, A.; Lawrence-Slavas, N.; Jenkins, R.; Wangen, I.; Calvin, W.; Mordy, C.M.; Meinig, C.; Levine, M.; Peacock, D.; Tabisola, H. Long-term measurements of fish backscatter from Saildrone unmanned surface vehicles and comparison with observations from a noise-reduced research vessel. ICES J. Mar. Sci. 2019, 76, 2459–2470. [Google Scholar] [CrossRef]
- Livanos, G.; Zervakis, M.; Chalkiadakis, V.; Moirogiorgou, K.; Giakos, G.; Papandroulakis, N. Intelligent Navigation and Control of a Prototype Autonomous Underwater Vehicle for Automated Inspection of Aquaculture net pen cages. In Proceedings of the 2018 IEEE International Conference on Imaging Systems and Techniques (IST), Krakow, Poland, 16–18 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kellaris, A.; Gil, A.; Faria, L.; Amaral, R.; Moreu, I.; Neto, A.I.; Yesson, C. Using low-cost drones to monitor heterogeneous submerged seaweed habitats: A case study in the Azores. Aquat. Conserv. Mar. Freshw. Ecosyst. 2019, 29, 1909–1922. [Google Scholar] [CrossRef]
- Percy, D.R.; Hishamunda, N.; Kuemlangan, B. Governance in marine aquaculture: The legal dimension. In Expanding Mariculture Farther Offshore: Technical, Environmental, Spatial and Governance Challenges, Proceedings of the FAO Technical Workshop, Orbetello, Italy, 22–25 March 2010; Lovatelli, A., Aguilar-Manjarrez, J., Soto, D., Eds.; FAO Fisheries and Aquaculture Proceedings No. 24; FAO: Rome, Italy, 2013; pp. 245–262. [Google Scholar]
- Chu, Y.; Wang, C.M.; Park, J.C.; Lader, P. Review of cage and containment tank designs for offshore fish farming. Aquaculture 2020, 519, 734928. [Google Scholar] [CrossRef]
- Holmer, M. Environmental issues of fish farming in offshore waters: Perspectives, concerns and research needs. Aquac. Environ. Interact. 2010, 1, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Marine Fish Farms—Requirements for Site Survey Analyses, Design, Dimensioning, Production, Installation and Operation. Reference Number NS 9415:2009; Standards Norway: Lillesand, Norway, 2009.
- Gupta, A.; Afrin, T.; Scully, E.; Yodo, N. Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities. Future Transp. 2021, 1, 326–350. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Thomasson, J.; Murray, S.; Pugh, N.; Rooney, W.; Rajan, N.; Gregory, R.; Morgan, C.; Neely, H.; Rana, A.; et al. Unmanned Aerial Vehicles for High-Throughput Phenotyping and Agronomic Research. PLoS ONE 2016, 11, e0159781. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Advexure Unmanned Systems and Solutions. Available online: https://advexure.com/pages/autel-dragonfish (accessed on 22 December 2021).
- Skyfront. Available online: https://skyfront.com/perimeter-8/ (accessed on 22 December 2021).
- Yoo, S.; Ju, Y.; Kim, J.; Kim, E.K. Design and Development of Underwater Drone for Fish Farm Growth Environment Management. J. Korea Inst. Electron. Commun. Sci. 2020, 15, 959–966. [Google Scholar]
- Sousa, D.; Hernandez, D.; Oliveira, F.; Luís, M.; Sargento, S. A Platform of Unmanned Surface Vehicle Swarms for Real Time Monitoring in Aquaculture Environments. Sensors 2019, 19, 4695. [Google Scholar] [CrossRef] [Green Version]
- Sousa, D.; Sargento, S.; Pereira, A.; Luis, M. Self-adaptive Team of Aquatic Drones with a Communication Network for Aquaculture. Prog. Artif. Intell. 2019, 569–580. [Google Scholar] [CrossRef]
- Bell, T.W.; Nidzieko, N.J.; Siegel, D.A.; Miller, R.J.; Cavanaugh, K.C.; Nelson, N.B.; Reed, D.C.; Fedorov, D.; Moran, C.; Snyder, J.N.; et al. The Utility of Satellites and Autonomous Remote Sensing Platforms for Monitoring Offshore Aquaculture Farms: A Case Study for Canopy Forming Kelps. Front. Mar. Sci. 2020, 7, 1083. [Google Scholar] [CrossRef]
- Rasmussen, C.; Zhao, J.; Ferraro, D.; Trembanis, A. Deep Census: AUV-Based Scallop Population Monitoring. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 2865–2873. [Google Scholar] [CrossRef]
- Ferraro, D. Estimating Sea Scallop Incidental Mortality from Photogrammetric before-after-Control-Impact Surveys. Master’s Thesis, University of Delaware, Newark, DE, USA, 2016. [Google Scholar]
- Walker, J.; Trembanis, A.; Miller, D. Assessing the use of a camera system within an autonomous underwater vehicle for monitoring the distribution and density of sea scallops (Placopecten magellanicus) in the Mid-Atlantic Bight. Fish. Bull. 2016, 114, 261–273. [Google Scholar] [CrossRef]
- Sadrfaridpour, B.; Aloimonos, Y.; Yu, M.; Tao, Y.; Webster, D. Detecting and Counting Oysters. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 2156–2162. [Google Scholar] [CrossRef]
- Bjerkeng, M.; Kirkhus, T.; Caharija, W.; Thielemann, J.T.; Amundsen, H.B.; Johan Ohrem, S.; Ingar Grøtli, E. ROV Navigation in a Fish Cage with Laser-Camera Triangulation. J. Mar. Sci. Eng. 2021, 9, 79. [Google Scholar] [CrossRef]
- Meng, L.; Hirayama, T.; Oyanagi, S. Underwater-Drone with Panoramic Camera for Automatic Fish Recognition Based on Deep Learning. IEEE Access 2018, 6, 17880–17886. [Google Scholar] [CrossRef]
- Chalkiadakis, V.; Papandroulakis, N.; Livanos, G.; Moirogiorgou, K.; Giakos, G.; Zervakis, M. Designing a small-sized autonomous underwater vehicle architecture for regular periodic fish-cage net inspection. In Proceedings of the IEEE International Conference on Imaging systems and Techniques, Beijing, China, 18–20 October 2017; pp. 1–6. [Google Scholar]
- Karimanzira, D.; Jacobi, M.; Pfützenreuter, T.; Rauschenbach, T.; Eichhorn, M.; Taubert, R.; Ament, C. First testing of an AUV mission planning and guidance system for water quality monitoring and fish behavior observation in net cage fish farming. Inf. Process. Agric. 2014, 1, 131–140. [Google Scholar] [CrossRef]
- Dumiak, M. Lice-hunting underwater drone protects salmon. IEEE Spectr. 2017, 54, 9–10. [Google Scholar] [CrossRef]
- Jensen, A.; Chen, Y. Tracking tagged fish with swarming Unmanned Aerial Vehicles using fractional order potential fields and Kalman filtering. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 1144–1149. [Google Scholar] [CrossRef]
- Segner, H.; Reiser, S.; Ruane, N.; Rösch, R.; Steinhagen, D.; Vehanen, T. Welfare of Fishes in Aquaculture. In FAO Fisheries and Aquaculture Circular No. 1189; FAO: Budapest, Hungary, 2019. [Google Scholar]
- Lien, A.; Schellewald, C.; Stahl, A.; Frank, K.; Skøien, K.; Tjølsen, J. Determining spatial feed distribution in sea cage aquaculture using an aerial camera platform. Aquac. Eng. 2019, 87, 102018. [Google Scholar] [CrossRef]
- Kondo, H.; Shimizu, E.; Choi, J.-K.; Nakane, K.; Matsushima, M.; Nagahashi, K.; Nishida, Y.; Matsui, R. Biointeractive Autonomous Underwater Vehicle “BA-1”. In Proceedings of the 2010 IEEE/OES Autonomous Underwater Vehicles, Monterey, CA, USA, 1–3 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Sousa, L.L.; López-Castejón, F.; Gilabert, J.; Relvas, P.; Couto, A.; Queiroz, N.; Caldas, R.; Dias, P.S.; Dias, H.; Faria, M.; et al. Integrated Monitoring of Mola mola Behaviour in Space and Time. PLoS ONE 2016, 11, e0160404. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.; Kastein, H.; Peterson, T.; White, C.; Lowe, C.G.; Clark, C.M. A multi-AUV state estimator for determining the 3D position of tagged fish. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3469–3475. [Google Scholar] [CrossRef]
- Seiler, J.; Williams, A.; Barrett, N. Assessing size, abundance and habitat preferences of the Ocean Perch Helicolenus percoides using a AUV-borne stereo camera system. Fish. Res. 2012, 129–130, 64–72. [Google Scholar] [CrossRef]
- Yao, D.; Cheng, L.; Wu, Q.; Zhang, G.; Wu, B.; He, Y. Assessment and prediction of fishery water quality using electrochemical sensor array carried by UAV. In Proceedings of the 2019 IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Fukuoka, Japan, 26–29 May 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, L.; Yue, X.; Wang, H.; Ling, K.; Liu, Y.; Wang, J.; Hong, J.; Pen, W.; Song, H. Dynamic Inversion of Inland Aquaculture Water Quality Based on UAVs-WSN Spectral Analysis. Remote Sens. 2020, 12, 402. [Google Scholar] [CrossRef] [Green Version]
- Powers, C.; Hanlon, R.; Schmale, D.G., III. Tracking of a Fluorescent Dye in a Freshwater Lake with an Unmanned Surface Vehicle and an Unmanned Aircraft System. Remote Sens. 2018, 10, 81. [Google Scholar] [CrossRef] [Green Version]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. Adaptive Water Sampling Device for Aerial Robots. Drones 2020, 4, 5. [Google Scholar] [CrossRef] [Green Version]
- Ore, J.P.; Elbaum, S.; Burgin, A.; Detweiler, C. Autonomous aerial water sampling. J. Field Robot. 2015, 32, 1095–1113. [Google Scholar] [CrossRef] [Green Version]
- Dunbabin, M.D.; Grinham, A.; Udy, J.W. An autonomous surface vehicle for water quality monitoring. In Proceedings of the 2009 Australasian Conference on Robotics and Automation (ACRA), Sydney, Australia, 2–4 December 2019; p. 13. [Google Scholar]
- Doi, H.; Akamatsu, Y.; Watanabe, Y.; Goto, M.; Inui, R.; Katano, I.; Nagano, M.; Takahara, T.; Minamoto, T. Water sampling for environmental DNA surveys by using an unmanned aerial vehicle: Drone water sampling for eDNA. Limnol. Oceanogr. Methods 2017, 15, 10214. [Google Scholar] [CrossRef]
- Lally, H.; O’Connor, I.; Jensen, O.; Graham, C.T. Can drones be used to conduct water sampling in aquatic environments? A review. Sci. Total Environ. 2019, 670, 569–575. [Google Scholar] [CrossRef] [PubMed]
- Kim, E.-J.; Nam, S.-H.; Koo, J.-W.; Hwang, T.-M. Hybrid Approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for Assessment of Chlorophyll-a Imagery Using Spectral Indices in Stream, South Korea. Water 2021, 13, 1930. [Google Scholar] [CrossRef]
- Zeng, C.; Richardson, M.; King, D. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Kelly, J.; Kljun, N.; Olsson, P.-O.; Mihai, L.; Liljeblad, B.; Weslien, P.; Klemedtsson, L.; Eklundh, L. Challenges and Best Practices for Deriving Temperature Data from an Uncalibrated UAV Thermal Infrared Camera. Remote Sens. 2019, 11, 567. [Google Scholar] [CrossRef] [Green Version]
- Lega, M. Using Advanced Aerial Platforms and Infrared Thermography to Track Environmental Contamination. Environ. Forensics 2012, 13, 332–338. [Google Scholar] [CrossRef]
- Sibanda, M.; Mutanga, O.; Chimonyo, V.G.P.; Clulow, A.D.; Shoko, C.; Mazvimavi, D.; Dube, T.; Mabhaudhi, T. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drones 2021, 5, 84. [Google Scholar] [CrossRef]
- Kumagai, M.; Ura, T.; Kuroda, Y.; Walker, R. A new autonomous underwater vehicle designed for lake environment monitoring. Adv. Robot. 2002, 16, 17–26. [Google Scholar] [CrossRef]
- Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things. Sensors 2018, 18, 3318. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Tan, X.; Yao, D.; Xu, W.; Wu, H.; Chen, Y. A Fishery Water Quality Monitoring and Prediction Evaluation System for Floating UAV Based on Time Series. Sensors 2021, 21, 4451. [Google Scholar] [CrossRef] [PubMed]
- Pennington, J.; Blum, M.; Chavez, F. Seawater sampling by an autonomous underwater vehicle: “Gulper” sample validation for nitrate, chlorophyll, phytoplankton, and primary production. Limnol. Oceanogr. Methods 2016, 14, 14–23. [Google Scholar] [CrossRef]
- Lee, E.; Yoon, H.; Hyun, S.P.; Burnett, W.C.; Koh, D.-C. Unmanned aerial vehicles (UAVs)-based thermal infrared (TIR) mapping, a novel approach to assess groundwater discharge into the coastal zone. Limnol. Oceanogr. Methods 2016, 14, 725–735. [Google Scholar] [CrossRef]
- Taddia, Y.; Russo, P.; Lovo, S. Multispectral UAV monitoring of submerged seaweed in shallow water. Appl. Geomat. 2020, 12, 19–34. [Google Scholar] [CrossRef] [Green Version]
- Tauro, F.; Porfiri, M.; Grimaldi, S. Surface flow measurements from drones. J. Hydrol. 2016, 540, 240–245. [Google Scholar] [CrossRef] [Green Version]
- Li, X.M.; Yuan, J.M.; Fu, S.F.; Zhang, Y.G. The effect of sustained swimming on the growth performance, muscle cellularity and flesh quality of juvenile qingbo (Spinibarus sinensis). Aquaculture 2016, 456, 287–295. [Google Scholar] [CrossRef]
- Yurovskaya, M.; Kudryavtsev, V.; Shirokov, A.; Nadolya, I. Field measurements of the sea surface wave spectrum from photos of sunglitter taken from drone. Geology 2018, 15, 245–257. [Google Scholar] [CrossRef]
- Almar, R.; Bergsma, E.W.J.; Catalan, P.A.; Cienfuegos, R.; Suarez, L.; Lucero, F.; Nicolae Lerma, A.; Desmazes, F.; Perugini, E.; Palmsten, M.L.; et al. Sea State from Single Optical Images: A Methodology to Derive Wind-Generated Ocean Waves from Cameras, Drones and Satellites. Remote Sens. 2021, 13, 679. [Google Scholar] [CrossRef]
- Streßer, M.; Carrasco-Álvarez, R.; Horstmann, J. Video-Based Estimation of Surface Currents Using a Low-Cost Quadcopter. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Fairley, I.; Williamson, B.; McIlvenny, J.; Lewis, M.; Neill, S.; Masters, I.; Williams, A.; Reeve, D. A preliminary assessment of the use of drones to quantify current velocities at tidal stream sites. In Proceedings of the European Wave and tidal Energy Conference, Plymouth, UK, 5–9 September 2021. [Google Scholar]
- Horstmann, J.; Stresser, M.; Carrasco, R. Surface currents retrieved from airborne video. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Tauro, F.; Pagano, C.; Phamduy, P.; Grimaldi, S.; Porfiri, M. Large-Scale Particle Image Velocimetry from an Unmanned Aerial Vehicle. IEEE/ASME Trans. Mechatron. 2015, 20, 3269–3275. [Google Scholar] [CrossRef]
- Eltner, A.; Sardemann, H.; Grundmann, J. Technical Note: Flow velocity and discharge measurement in rivers using terrestrial and unmanned-aerial-vehicle imagery. Hydrol. Earth Syst. Sci. 2020, 24, 1429–1445. [Google Scholar] [CrossRef] [Green Version]
- Hoth, J.; Kowalczyk, W. Determination of Flow Parameters of a Water Flow Around an AUV Body. Robotics 2019, 8, 5. [Google Scholar] [CrossRef] [Green Version]
- Matsuba, Y.; Sato, S. Nearshore bathymetry estimation using UAV. Coast. Eng. J. 2018, 60, 1–9. [Google Scholar] [CrossRef]
- Tauro, F.; Petroselli, A.; Arcangeletti, E. Assessment of drone-based surface flow observations. Hydrol. Processes 2015, 30, 10698. [Google Scholar] [CrossRef]
- Huang, Z.C.; Yeh, C.-Y.; Tseng, K.-H.; Hsu, W.-Y. A UAV-RTK-lidar system for wave and tide measurements in coastal zones. J. Atmos. Ocean. Technol. 2018, 35, 1557–1570. [Google Scholar] [CrossRef]
- Long, N.; Millescamps, B.; Guillot, B.; Pouget, F.; Bertin, X. Monitoring the Topography of a Dynamic Tidal Inlet Using UAV Imagery. Remote Sens. 2016, 8, 387. [Google Scholar] [CrossRef] [Green Version]
- Sanjou, M.; Shigeta, A.; Kato, K.; Aizawa, W. Portable unmanned surface vehicle that automatically measures flow velocity and direction in rivers. Flow Meas. Instrum. 2021, 80, 101964. [Google Scholar] [CrossRef]
- Jha, R. Wave Measurement Methodology and Validation from Wave Glider Unmanned Surface Vehicle. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Port Island, Kobe, 28–31 May 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Offshore Wind Solutions. Available online: https://www.saildrone.com/ (accessed on 25 December 2021).
- Federal Aviation Administration. Available online: https://www.faa.gov/uas/commercial_operators/ (accessed on 24 December 2021).
- Demir, K.; Cicibaş, H.; Arica, N. Unmanned Aerial Vehicle Domain: Areas of Research. Def. Sci. J. 2015, 65, 319–329. [Google Scholar] [CrossRef]
- Drone Laws for a Safer Airspace. Available online: https://drone-laws.com/ (accessed on 24 December 2021).
- Showalter, S. The legal status of autonomous underwater vehicles. Mar. Technol. Soc. J. 2004, 38, 80–83. [Google Scholar] [CrossRef]
- Norris, A. Legal Issues Relating to Unmanned Maritime Systems Monograph. Available online: https://www.iqpc.com/media/1002182/50661.pdf (accessed on 24 December 2021).
- Dhulkefl, E.; Durdu, A. Path Planning Algorithms for Unmanned Aerial Vehicles. Int. J. Trend Sci. Res. Dev. 2019, 3, 359–362. [Google Scholar] [CrossRef]
- Danancier, K.; Ruvio, D.; Sung, I.; Nielsen, P. Comparison of Path Planning Algorithms for an Unmanned Aerial Vehicle Deployment Under Threats. IFAC-Pap. OnLine 2019, 52, 1978–1983. [Google Scholar] [CrossRef]
- Medeiros, F.; Silva, J. A Dijkstra Algorithm for Fixed-Wing UAV Motion Planning Based on Terrain Elevation. In Proceedings of the 20th Brazilian Conference on Advances in Artificial Intelligence, São Bernardo do Campo, Brazil, 23–28 October 2010; p. 6404. [Google Scholar] [CrossRef]
- PVtech. Alta Devices Sets GaAs Solar Efficiency Record at 29.1% Joins NASA Space Station Testing. Available online: https://www.pv-tech.org/alta-devices-sets-gaas-solar-cell-efficiency-record-at-29-1-joins-nasa-spac/ (accessed on 28 November 2021).
- Chu, Y.; Ho, C.; Lee, Y.; Li, B. Development of a Solar-Powered Unmanned Aerial Vehicle for Extended Flight Endurance. Drones 2021, 5, 44. [Google Scholar] [CrossRef]
- Chae, H.; Park, J.; Song, H.; Kim, Y.; Jeong, H. The IoT based automate landing system of a drone for the round-the-clock surveillance solution. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 1575–1580. [Google Scholar] [CrossRef]
- Yu, Y.; Lee, S.; Lee, J.; Cho, K.; Park, S. Design and implementation of wired drone docking system for cost-effective security system in IoT environment. In Proceedings of the 2016 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 7–11 January 2016; pp. 369–370. [Google Scholar] [CrossRef]
- Mahmoud, S.; Mohamed, N.; Al-Jaroodi, J. Integrating UAVs into the Cloud Using the Concept of the Web of Things. J. Robot. 2015, 2015, 631420. [Google Scholar] [CrossRef] [Green Version]
- Almutiry, O.; Iqbal, K.; Hussain, S.; Mahmood, A.; Dhahri, H. Underwater images contrast enhancement and its challenges: A survey. Multimed. Tools Appl. 2021. [Google Scholar] [CrossRef]
- Karpatne, A.; Khandelwal, A.; Chen, X.; Mithal, V.; Faghmous, J.; Kumar, V. Global Monitoring of Inland Water Dynamics: State-of-the-Art, Challenges, and Opportunities. In Computational Sustainability; Studies in Computational Intelligence; Lässig, J., Kersting, K., Morik, K., Eds.; Springer: Cham, Switzerland, 2016; p. 645. [Google Scholar] [CrossRef]
- Ljubičić, R.; Strelnikova, D.; Perks, M.; Eltner, A.; Peña-Haro, S.; Pizarro, A.; Dal, S.; Silvano, F.; Scherling, U.; Vuono, P.; et al. A comparison of tools and techniques for stabilising UAS imagery for surface flow observations. Adv. River Basin Monit. 2021. [Google Scholar] [CrossRef]
- Bbm Secure Maritime Division. Fight Illegal Fishing Economical Coastal Surveillance. Available online: https://bbcomsecure.com/resources/bbsec_IUU_Fishing_economical_costal_surveilance_system.pdf (accessed on 15 December 2021).
- Elkolali, M.; Al-Tawil, A.; Much, L.; Schrader, R.; Masset, O.; Sayols, M.; Jenkins, A.; Alonso, S.; Carella, A.; Alcocer, A. A low-cost wave/solar powered unmanned surface vehicle. In Proceedings of the Global Oceans Singapore, Singapore, 5–14 October 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Blueye. Aquaculture. Available online: https://www.blueyerobotics.com/page/aqua-culture (accessed on 25 December 2021).
- Aquaculture ROVs for Net Inspections, Patching, Mort Pushing, and Site Selection. Available online: https://www.deeptrekker.com/industries/aquaculture (accessed on 25 December 2021).
- Enterprise Grade ROV Platform Powerful & Precise, Advanced Add-Ons, Exceptional Stability, Superior Battery. Available online: https://www.qysea.com/products/fifish-w6/ (accessed on 25 December 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Major Subtype | Capability | Design Trade-Off | Challenges or Limitations | Source |
|---|---|---|---|---|
| Inertial | Data collection from accelerometers and gyroscopes to determine position, orientation, and velocity; measures line accelerations and angular velocities; provides high-frequency time. | Data-processing capability, power inefficient, sensor calibration. | Requires data processing and data fusion from multiple sensors to correct drift errors; accuracy deteriorates along time when operating in stand-alone mode. | [72,73] |
| GPS | Continuous 3D positioning in the coverage area. | Data rate of communication link, signal frequency | GPS is susceptible to intercept and jamming and is not available in the underwater environment; suffers from numerical errors, atmospheric effect, and multipath errors. | [72,74] |
| Acoustics | Uses acoustic transponders to determine the position relative to receivers or features (e.g., seafloor); enables accurate and reliable positioning even in low visibility environment; robustness to environmental disturbances. | Sensor geometry | Some sensors require fixed infrastructure and bottom-lock; water presents environmental constraints, and some systems have speed restrictions.; Limited to performing surface navigations. | [72,75,76] |
| Radar | Combines radar imagery with sea charts to determine the positioning. | Sensor geometry, power inefficiency, and data-processing capability; aircraft size. | Using radar as a navigational tool requires feature-rich environments and is limited to use above water.; Its accuracy decreases as the size of the aircraft decreases. | [72,77] |
| Depth | Measure of ambient pressure of the water column to calculate depth; insensitive to changes in lighting conditions with 3D information; provides the metric distance; provides low-level stability control and high-level navigation and motion planning. | Sensor configuration; Sensor fusion. | Limitations are minimal. measurement sensors will function at lower depths than projected platforms are intended to go. | [72,78,79] |
| Orientation | Calculate the heading of the platform using one or several sensors. | Power inefficient | Degraded performance when accelerated. | [72,80] |
| Light and optics | Uses environmental features or landmarks (e.g., stars, pipeline) to determine position; low cost, high reliability, high accuracy, and real-time performance. | Data-processing capability | Environmental constraints, such as water and fog, limit accuracy. | [72,81,82] |
| Characteristics | Type of Sensor | |||||||
|---|---|---|---|---|---|---|---|---|
| Lidar | Radar | Ultrasonic | Monocular Camera | Stereo Camera | Omni-directional Camera | Infrared Camera | Event Camera | |
| Illumination | - | - | - | Yes | Yes | Yes | No | Yes |
| Weather | Yes | No | - | Yes | Yes | Yes | Yes | Yes |
| Color and texture | No | No | No | Yes | Yes | Yes | No | No |
| Depth Information | Yes | Yes | Yes | No | Yes | No | No | No |
| Area of coverage (m) | <200 m | <200 m | <5 m | Range operational environment dependent | <100 m | Range operational environment dependent | Range operational environment dependent | Range operational environment dependent |
| Level of accuracy | High | Medium | Low | High | High | High | Low | Low |
| Size | Large | Small | Small | Small | Medium | Small | Small | Small |
| Affordability | Low | Medium | High | High | High | High | High | High |
| Type of Sensor | Advantages | Limitations | Source |
|---|---|---|---|
| Radar | Long detection range; not affected by weather and broad-area imagery; high depth resolution and accuracy. | Skewed data from fast turning maneuvers; limited small and dynamic target detection capability; affected by high waves and water reflectivity. | [71,85] |
| LIDAR | Performs well for near-range obstacle detection; suitable for spatial classification (position and speed); it can present point cloud data of the surface features with high accuracy and high resolution. | Sensor noise and calibration errors; affected by the weather environment and vehicle movements. | [71,85,84] |
| Acoustics | No visual restrictions; High depth resolution and accuracy. | Limited detecting range in each scanning; affected by noise from near-surface area; low spatial resolution. | [85,86] |
| Visual sensor | High lateral and temporal resolution; simple and low weight in practical application. | Low depth resolution and accuracy; challenge to real-time implementation; dependent on light and weather conditions such as rains. | [71,84,85,87] |
| Infrared sensor | Applicable for dark condition; low power requirement; small size and easy deployment. | Indoor or evening use only; sunlight interference; low accuracy; impressionable to interference and distance. | [71,85] |
| Inertial Measurement Unit (IMU) Sensors | Small size, low cost, and efficient power consumption; better performance for dynamic orientation calculation. | Sensitive to accumulated error and magnetic environment, or signal noise; regular calibration maintenance. | [85,88] |
| GPS/Differential GPS | Small size, low acquisition cost, and efficient power consumption. | Susceptible to closed or covered area and magnetic environment; Delays, orbital errors and receiver clock errors. | [85,89] |
| Type of LPWAN Technology | Coverage | Data Rate | Pros | Cons | Source/s |
|---|---|---|---|---|---|
| LoRa | Urban: 5 km Rural: 20 km | 50 kbps | Wider coverage; Low power consumption; Low cost | Not open standard; No direct connection between devices. | [94,95,101,102,103] |
| SigFox | Urban: 10 km Rural: 40 km | 100 kbps | Lowest bandwidth; Open standard; Low power consumption; High receiver sensitivity; Widest coverage; Low cost | High latency in communication; Small quantities of data | [101,102,103,104,105] |
| NB-IoT | Urban: 1 km Rural: 10 km | 200 kbps | Low bandwidth; High airtime; Strong signal; low energy consumption; Excellent security | Higher cost as compared to other LPWAN technologies | [101,103] |
| Type of Unmanned Vehicle Used | Applications | Attached Sensors | Reference/s |
|---|---|---|---|
| Customized and augmented UAV with delta wing design | Surveillance | Thermal camera, location transmitter, RF signal generator | [151] |
| Customized ROV | Underwater surveillance | GoPro HD Hero2 | [149] |
| Hexacopter AUV | Cage detection | On-board camera | [147] |
| Customized rotorcraft AUV | Cage inspection | Lidar | [29] |
| Customized AUV using BlueROV2 | Inspection of aquaculture net pens to identify holes or fouling of nets | AUV camera | [153] |
| Phantom 3 Professional senseFly eBee | Mapping | Sony EXMOR 4K RGBCanon PowerShot S110 RGB | [144] |
| Customized UAV | Photogrammetric survey | Super-wide-angle camera | [145] |
| Phantom 4 Pro V2.0 | Scene modeling | Built-in camera | [146] |
| UAV type not specified | Ship classification and detection | Color camera and wide-angle lens | [140,141] |
| DJI Phantom 3 Professional quadcopter drone | Sea-weed habitat mapping | Sony EXMOR camera | [154] |
| Location of the Aquaculture Farm | Characteristics | |||
|---|---|---|---|---|
| Physical | Exposure | |||
| Distance from the Shore | Visibility from the Shore | Waves | Accessibility | |
| Coastal | <500 m | Visible | Small to moderate exposure | 100% |
| Off-Coast | 500 m to 3 km | Usually visible | High to huge exposure | >90% |
| Off-Shore | >3 km | Not visible | Huge exposure | >80% |
| Characteristics | Rotary-Wing | Fixed-Wing | Hybrid |
|---|---|---|---|
| Weight (kg) | 0.01 to 100 | 0.1 to 400,000 | 1.5 to 65 |
| Payload (kg) | 0 to 50 | 0 to 1000 | 0 to 10 |
| Ceiling altitude (km) | 4 | 0.1 to 300 | - |
| Endurance (m) | 6 to 180 | 60 to 3000 | 180 to 480 |
| Range | 0.05 to 200 km | 2 to 20 mil | - |
| Power source | Battery | Fuel or battery | Fuel or battery |
| Hover | Yes | No | Yes |
| Autonomy | Yes | No | Yes |
| Take-off/Landing | Vertical | Conventional | Vertical |
| Control Complexity | Simple | Complex | Most Complex |
| Flight System | Simple | Complex | Complex |
| Energy Efficiency | Less | More | More |
| Application | Type of UV Used | Attached Devices/Sensors | Reference/s |
|---|---|---|---|
| Oyster detection and counting | BlueRobotics BlueROV2 | GoPro camera and led lights | [172] |
| Assessment of the population/stocks of wild scallops | Gavia AUV | Downward-pointing digital camera | [169] |
| Telegavia UAV | a Point Grey Grasshopper 14S5C/M-C model with Sony ICZ285AL CCD | [170] | |
| Teledyne Gavia AUV | Nose cone camera, GeoSwath phase measuring bathymetric sonar, Marine Sonic side-scan sonar) | [171] | |
| Monitoring of the growth environment at the farm site | Customized ROV | USB camera based on LIFI | [165] |
| Offshore kelp monitoring | DJI Phantom 4 Pro | 20 MP (1″ CMOS sensor, 84° FOV) color camera | [168] |
| Recognition of fish species | Underwater drone (type not specified) | 360-degree panoramic camera with two 235-degree fisheye lenses | [174] |
| Salmon protection | Underwater laser drone | Stereo camera system | [177] |
| Fish cage inspection | BlueROV2 of BlueRobotics | Camera | [175] |
| Observation of fish behavior | Customized UAV | Cameras with power LEDs and water quality sensors | [56] |
| Fish tracking | AggieAir | Visual camera, near-infrared (NIR) camera, thermal infrared camera, and air quality sensors | [178] |
| Measurement Indicators | Type/Brand of; UV Used | Sensors/Devices Installed | Sampling Location | Reference/s |
|---|---|---|---|---|
| Dissolved oxygen | DJI M600 pro | k4 multispectrometer camera | Inland | [186] |
| Customized Six-rotor UAV | Dissolved oxygen sensor | Open sea | [185] | |
| AUV Tantan | Conductivity, temperature, and depth (CD) sensors | Open sea | [198] | |
| Customized multi-rotor UAV | Sensor nodes, water sampling cartridge | Ponds, lakes | [188] | |
| Customized multirotor UAV with hovercraft | Dissolved oxygen sensor | Lake | [199] | |
| Turbidity | DJI M600 pro | k4 multispectrometer camera | Inland | [186] |
| AUV Tantan | Conductivity, temperature, and depth (CD) sensors | Open sea | [198] | |
| Customized multirotor UAV | Sensor nodes, water sampling cartridge | Ponds, lakes | [188] | |
| Quad-copter (DJI Phantom 2 Vision Plus) and hexa-copter (DJI Spreading Wings S800 | RGB Camera | Open sea | [170] | |
| Customized multirotor UAV with hovercraft | Turbidity sensor | Lake | [199] | |
| pH Level | Six-rotor UAV | pH nitrogen sensor | Open sea | [185] |
| AUV Tantan | Conductivity, temperature, and depth (CD) sensors | Open sea | [198] | |
| Customized multirotor UAV | Sensor nodes, water sampling cartridge | Ponds, lakes | [188] | |
| Customized multirotor UAV with hovercraft | pH level sensor | Lake | [199] | |
| Ammonia nitrogen | Six-rotor UAV | Ammonia nitrogen sensor | Open sea | [185] |
| Customized UAV | Ammonia nitrogen sensor | Lake | [200] | |
| Nitrate | Customized AUV “Dorado” | Gulper water samples | Bay and offshore water | [201] |
| Temperature | UAV Tantan | Conductivity, temperature, and depth (CD) sensors | Open sea | [198] |
| DJI Octocopter UAV | FLIR T450sc Thermal camera; Infrared camera | Coastal water | [202] | |
| Customized multirotor UAV | Sensor nodes, water sampling cartridge | Ponds, lakes | [188] | |
| Chlorophyll-a | UAV Tantan | Conductivity, temperature, and depth (CD) sensors | Open sea | [198] |
| Customized AUV “Dorado” | Gulper water samples | Bay and offshore water | [201] | |
| Remo-M UAV | Sequoia multispectral sensor with 4 cameras to capture spectral images (algae blooms) | Streams | [193] | |
| Customized UAV | Portable fluorometers | Streams | [193] | |
| Quad-copter (DJI Phantom 2 Vision Plus) and hexa-copter (DJI Spreading Wings S800). | RGB Camera | Open sea | [194] | |
| Redox Potentia | UAV Tantan | Conductivity, temperature, and depth (CD) sensors | Open sea | [198] |
| Phytoplankton counts | Customized AUV “Dorado” | Gulper water sampler | Bay and offshore water | [201] |
| Salinity | DJI Octocopter UAV | FLIR T450sc Thermal camera and infrared camera | Coastal water | [202] |
| DJI Phantom 3 Professional UAV | MicaSense RedEdge-M multispectral camera | Lagoon ; (Shallow water) | [203] | |
| Colored dissolved organic matter (CDOM) | Quad-copter (DJI Phantom 2 Vision Plus) and hexa-copter (DJI Spreading Wings S800 | RGB Camera | Open sea | [194] |
| Fluorescent dye | Clearpath Robotics Kingfisher M200 USV (dye detection and tracking) and DJI Phantom UAV (image capture) | Fluorometer (fluorescence sensor) | Freshwater lake | [187] |
| Electrical conductivity | Customized multirotor UAV | Sensor nodes, water sampling cartridge | Ponds, lake | [188] |
| Customized multi-rotor UAV with hovercraft | Electrical conductivity sensor | Lake | [199] |
| Application | Type of UV Used | Attached Sensors/; Devices | Environment | Reference/s |
|---|---|---|---|---|
| Surface flow/current measurement | DJI Phantom 2 quadrotor | Zenmuse H3-2D gimbal and a GoPro Hero 3 camera | Open sea | [204] |
| DJI Phantom III Professional | Self-stabilizing camera gimbal | River | [208] | |
| DJI Phantom 3 Professional | Brushless gimbal and 4K video camera | River | [210] | |
| Custom-built unmanned aerial platform | Lightweight camera gimbal; GoPro Hero 3 | Water tunnel and water stream | [211] | |
| AscTec Falcon 8 | Sony NEX-5N | River | [212] | |
| Custom built torpedo-shaped AUV | Pressure sensors | Sea | [213] | |
| Measurement of large-scale surface velocity fields | DJI Phantom FC40 | 4K GoPro Hero 3+ Black Edition camera | River | [99] |
| Speed of wave crest | DJI Phantom 2 Vision+ | Camera | Coast | [214] |
| Derive spatial and dynamic characteristics of waves. | DJI Mavic Pro | Acoustic Doppler Current Profiler | Coast | [207] |
| Surface flow observation | DJI Phantom 2 | H3-2D gimbal, a GoPro Hero 3 camera, and a system of four green lasers | Stream | [215] |
| Field measurements of tidal elevation (water depth), wave spectrum, wave height, and wave period | DJI, S1000 | Scanning lidar (Hokuyo, UTM-30LX | Coast | [216] |
| Monitoring the topography of a dynamic tidal inlet | eBee flying wing | Canon Powershot ELPH110 HS RGB camera | Coast | [217] |
| Velocities of tidal streams | DJI M210v2 RTK | Zenmuse X7 lens | Tidal stream | [209] |
| Water surface detection and cleaning | Customized multi-function USV | OmniVision Image Sensor; Pixy CMUcam5 | Shallow lake | [213] |
| Flow velocity and direction | ATOMIC 792–4 p | USB Camera | River | [218] |
| Surface gravity waves | Wave Glider Float | MicroStrain GPS + AHRS | Bay | [219] |
| Surface meteorology and wind power density | Wave Glider—American Liquid Robotics | Oceanographic sensors | Offshore-Ocean | [220] |
| Application to Aquaculture | Advantages | Disadvantages |
|---|---|---|
|
|
|
| Aquaculture site surveillance and monitoring | ||
|
|
|
|
| |
| ||
|
|
|
| ||
|
|
|
|
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ubina, N.A.; Cheng, S.-C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones 2022, 6, 12. https://doi.org/10.3390/drones6010012
Ubina NA, Cheng S-C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones. 2022; 6(1):12. https://doi.org/10.3390/drones6010012
Chicago/Turabian StyleUbina, Naomi A., and Shyi-Chyi Cheng. 2022. "A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management" Drones 6, no. 1: 12. https://doi.org/10.3390/drones6010012
APA StyleUbina, N. A., & Cheng, S.-C. (2022). A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones, 6(1), 12. https://doi.org/10.3390/drones6010012