Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety


Abstract
1. Introduction
2. Application Area: Smart Cities and Public Safety
2.1. Introduction to Smart Cities and Public Safety
2.2. Mission Types for UAVs in Smart Cities for Public Safety
- Public Safety and Civil Security
- Emergency/Disaster Monitoring and Control
- Traffic and Crowd Management
- Security for Public Events
- Environmental Management
- (Big) Data Generation
- Surveying
- Coordination between heterogeneous systems
2.2.1. Mobile Aerial Communication Infrastructure
2.2.2. Smart City Sensing
2.2.3. Intelligence Gathering
2.2.4. Monitoring
2.3. Application Types for UAVs in Smart Cities for Public Safety
2.3.1. Sensing & Monitoring Applications
2.3.2. Actuation Applications
2.3.3. Services
2.4. Advantages of Using UAVs, Individually or in Swarms
2.4.1. UAVs in General
2.4.2. Usage of UAV Swarms in Smart Cities and for Public Safety Applications
3. Application Area: Civil Security and Disaster Response
3.1. Most Common Mission Types for UAVs in Civil Security and Disaster Response
3.1.1. Mobile Wireless Access Networks
3.1.2. Mobile Wireless Sensing Networks
3.1.3. Monitoring, Intelligence Gathering & Situational Awareness in Inaccessible Environments
3.2. Mission Categories and Application Classes for Civil Security and Disaster Response
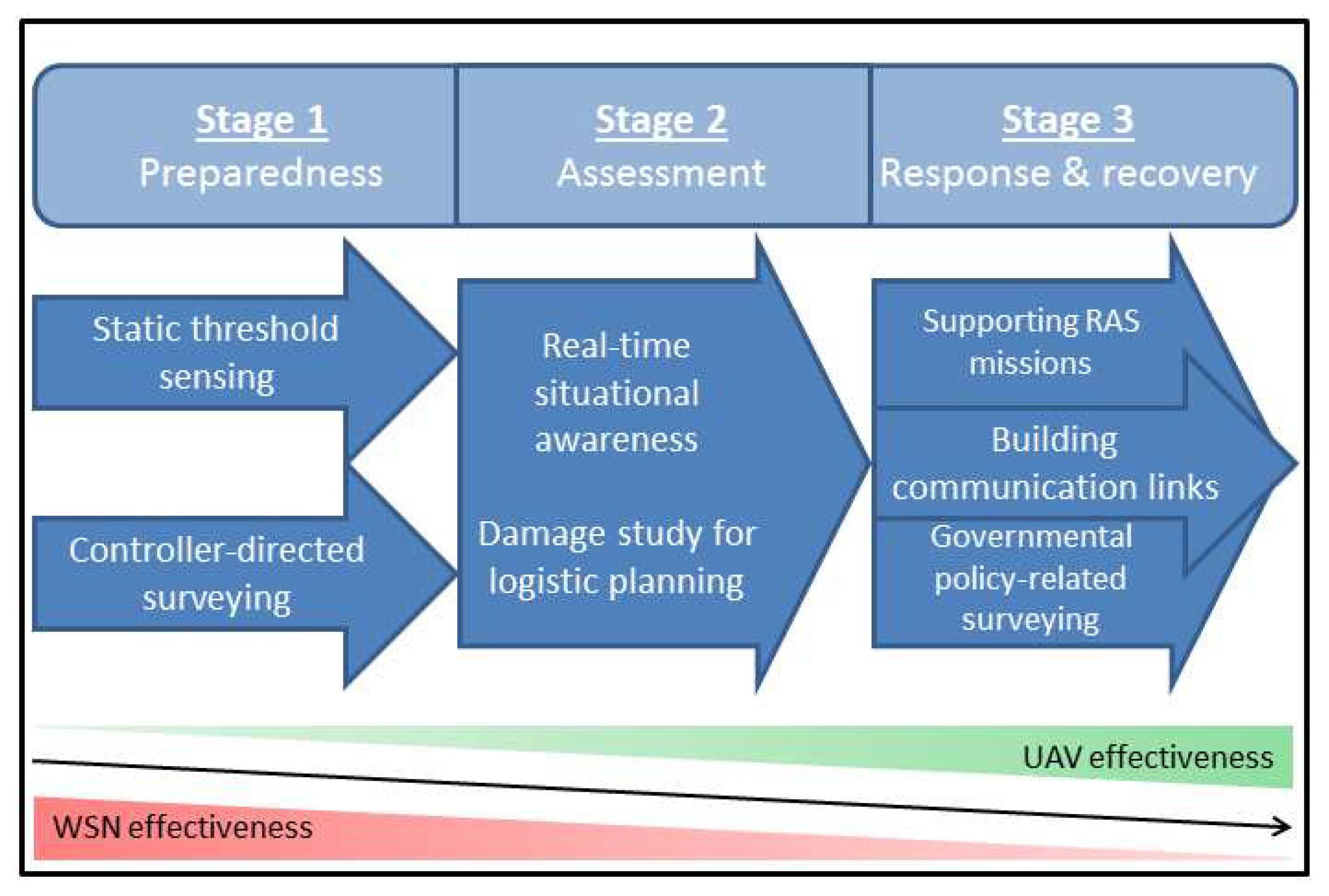
3.2.1. Mission Categories
- Pre-disaster preparedness: pre-empting actions that would cause—or worsen the impact of—a disaster and implement measures to mitigate (or entirely avoid) the impact of an event.
- Disaster assessment: evaluate the areas impacted by a disaster, assess the extent to which they are affected and aggregate this information into reports.
- Disaster response and recovery: on the basis of the above, react and respond efficiently.
3.2.2. Application Classes
- Search and Rescue (SR),
- Reconnaissance and Mapping (RM),
- Structural Inspection (SI) and
- Debris Estimation (DE).
3.3. Application Types for UAVs during or in the Wake of Disasters
3.3.1. Sensing & Monitoring Applications
- surveillance [40,48,82,87,90,91,113] and monitoring [74,80,81,82,86,88,113] missions. UAVs are ideal suited for aerial surveillance [53,93] and tracking [78]. They are widely used for structural—monitoring [105] (and —inspection [104]), traffic—monitoring [53,68,78] (and —management [40]), environment monitoring [34,40,53,79,87] (e.g., for terrain [90] and vegetation [68,114] surveying, assessing ice/snow thickness [115] and ecosystem monitoring [68]), hazard monitoring (for e.g., gas [73], radiation [100] but also for wildfires [78] or forrest fires [53]) and weather monitoring [40], specifically atmospheric forecast [79] and wind [116].
3.3.2. Actuation Applications
3.3.3. Services
3.4. Advantages of Using UAVs, Individually or in Swarms
3.4.1. UAVs in General
- UAVs can reduce disaster worker-, claims adjuster-, and risk engineer-exposure to danger.
- Drones enhance the effectiveness of responders.
- Drones provide unique viewing angles not possible from manned aircraft.
- Drone technology is highly deployable.
- Drone technology is cost-efficient.
3.4.2. Usage of UAV Swarms in Civil Security and Disaster Response Applications
4. Application Challenges
4.1. Communication and Communication Infrastructure
4.1.1. Operating a Communication Infrastructure
4.1.2. Operating in the Absence of a Communication Infrastructure
4.2. Hardware and Software
4.2.1. Device Classes
4.2.2. Device Payload and Flight Time
4.2.3. Sensing Equipment
- Visible spectrum imaging,
- Infrared spectrum imaging [132], and
- Fluorescence excitation
4.2.4. Software
4.3. UAV Operation
4.3.1. Environmental
4.3.2. UAV Traffic Management
4.3.3. So-Called Legal Issues
4.3.4. Privacy and Data Security
5. Conclusions
Funding
Conflicts of Interest
Abbreviations
| CAGR | Compound Annual Growth Rate |
| DE | Debris Estimation |
| GNSS-R | Global Navigation Satellite System Reflectometry |
| HAB | High Altitude Balloons |
| IAS | Intelligent Autonomous Systems |
| IoT | Internet of Things |
| MSP | Mobile Sensing Platform |
| NEC | NEC Corporation, formerly Nippon Electric Company, Limited |
| NLE | NEC research Labs, Europe |
| RM | Reconnaissance and Mapping |
| ROA | Remotely Operated Aircrafts |
| RPA | Remotely Piloted Aircrafts |
| SI | Structural Inspection |
| SR | Search and Rescue |
| SAR | Search and Rescue |
| TNO | Dutch Organisation for Applied Scientific Research |
| TSP | Travelling Salesman Problem |
| UAS | Unmanned Aerial Systems |
| UAV | Unmanned Aerial Vehicles |
| USV | Unmanned Surface Vehicles |
| UGV | Unmanned Ground Vehicle |
| UHF | Ultra High Frequency |
| VHF | Very High Frequency |
| WSN | Wireless Sensor Networks |
References
- Schneider, D. Open season on drones? IEEE Spectr. 2014, 51, 32–33. [Google Scholar] [CrossRef]
- Coopmans, C. Architecture requirements for Ethical, accurate, and resilient Unmanned Aerial Personal Remote Sensing. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Marcus, M. Spectrum policy challenges of UAV/drones [Spectrum Policy and Regulatory Issues]. IEEE Wirel. Commun. 2014, 21, 8–9. [Google Scholar] [CrossRef]
- Ogan, R. Integration of manned and unmanned aircraft systems into U.S. airspace. In Proceedings of the IEEE SOUTHEASTCON 2014, Lexington, KY, USA, 13–16 March 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Broad, W.J. The U.S. Flight from Pilotless Planes. Science 1981, 213, 188–190. [Google Scholar] [CrossRef] [PubMed]
- Conesa-Muñoz, J.; Valente, J.; Del Cerro, J.; Barrientos, A.; Ribeiro, A. A Multi-Robot Sense-Act Approach to Lead to a Proper Acting in Environmental Incidents. Sensors 2016, 16, 1269. [Google Scholar] [CrossRef] [PubMed]
- Oh, H.; Shirazi, A.R.; Sun, C.; Jin, Y. Bio-inspired self-organising multi-robot pattern formation: A review. Robot. Auton. Syst. 2017, 91, 83–100. [Google Scholar] [CrossRef]
- Arbanas, B.; Ivanovic, A.; Car, M.; Orsag, M.; Petrovic, T.; Bogdan, S. Decentralized planning and control for UAV–UGV cooperative teams. Auton. Robots 2018, 42, 1601–1618. [Google Scholar] [CrossRef]
- Schlotfeldt, B.; Thakur, D.; Atanasov, N.; Kumar, V.; Pappas, G.J. Anytime Planning for Decentralized Multirobot Active Information Gathering. IEEE Robot. Autom. Lett. 2018, 3, 1025–1032. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.I.; Dou, Z.; Almaita, E.K.; Khalil, I.M.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Patil, M.; Abukhalil, T.; Sobh, T. Hardware Architecture Review of Swarm Robotics System: Self-Reconfigurability, Self-Reassembly, and Self-Replication. ISRN Robot. 2013, 2013, 11. [Google Scholar] [CrossRef]
- Spezzano, G. Editorial: Special Issue “Swarm Robotics”. Appl. Sci. 2019, 9, 1474. [Google Scholar] [CrossRef]
- Yang, J.; Wang, X.; Bauer, P. V-Shaped Formation Control for Robotic Swarms Constrained by Field of View. Appl. Sci. 2018, 8, 2120. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, J.; Shi, X.; Jiang, C. Decentralization of Virtual Linkage in Formation Control of Multi-Agents via Consensus Strategies. Appl. Sci. 2018, 8, 2020. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, J.; Liu, C.; Zhao, F.; Zhao, J. Reconfigurable Formation Control of Multi-Agents Using Virtual Linkage Approach. Appl. Sci. 2018, 8, 1109. [Google Scholar] [CrossRef]
- Tan, W.; Wei, H.; Yang, B. SambotII: A New Self-Assembly Modular Robot Platform Based on Sambot. Appl. Sci. 2018, 8, 1719. [Google Scholar] [CrossRef]
- Qian, D.; Xi, Y. Leader–Follower Formation Maneuvers for Multi-Robot Systems via Derivative and Integral Terminal Sliding Mode. Appl. Sci. 2018, 8, 1045. [Google Scholar] [CrossRef]
- Nishikawa, N.; Suzuki, R.; Arita, T. Exploration of Swarm Dynamics Emerging from Asymmetry. Appl. Sci. 2018, 8, 729. [Google Scholar] [CrossRef]
- Garcia-Aunon, P.; Barrientos Cruz, A. Comparison of Heuristic Algorithms in Discrete Search and Surveillance Tasks Using Aerial Swarms. Appl. Sci. 2018, 8, 711. [Google Scholar] [CrossRef]
- Wang, W.; Bai, P.; Li, H.; Liang, X. Optimal Configuration and Path Planning for UAV Swarms Using a Novel Localization Approach. Appl. Sci. 2018, 8, 1001. [Google Scholar] [CrossRef]
- Pan, L.; Lu, Q.; Yin, K.; Zhang, B. Signal Source Localization of Multiple Robots Using an Event-Triggered Communication Scheme. Appl. Sci. 2018, 8, 977. [Google Scholar] [CrossRef]
- Lee, K.B.; Kim, Y.J.; Hong, Y.D. Real-Time Swarm Search Method for Real-World Quadcopter Drones. Appl. Sci. 2018, 8, 1169. [Google Scholar] [CrossRef]
- Ge, H.; Chen, G.; Xu, G. Multi-AUV Cooperative Target Hunting Based on Improved Potential Field in a Surface-Water Environment. Appl. Sci. 2018, 8, 973. [Google Scholar] [CrossRef]
- Jin, X.; Kim, J. 3D Model Identification Using Weighted Implicit Shape Representation and Panoramic View. Appl. Sci. 2017, 7, 764. [Google Scholar] [CrossRef]
- Cheng, L.; Wu, X.H.; Wang, Y. Artificial Flora (AF) Optimization Algorithm. Appl. Sci. 2018, 8, 329. [Google Scholar] [CrossRef]
- Połap, D.; Kȩsik, K.; Woźniak, M.; Damaševičius, R. Parallel Technique for the Metaheuristic Algorithms Using Devoted Local Search and Manipulating the Solutions Space. Appl. Sci. 2018, 8, 293. [Google Scholar] [CrossRef]
- Wang, H.; Li, Y.; Chang, T.; Chang, S.; Fan, Y. Event-Driven Sensor Deployment in an Underwater Environment Using a Distributed Hybrid Fish Swarm Optimization Algorithm. Appl. Sci. 2018, 8, 1638. [Google Scholar] [CrossRef]
- Gainer, J.J., Jr.; Dawkins, J.J.; DeVries, L.D.; Kutzer, M.D.M. Persistent Multi-Agent Search and Tracking with Flight Endurance Constraints. Robotics 2018, 8, 2. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.; Dobbins, P. A Survey of Channel Modeling for UAV Communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.; Schneckenberger, N. A Survey of Air-to-Ground Propagation Channel Modeling for Unmanned Aerial Vehicles. IEEE Commun. Surv. Tutor. 2019. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-Altitude Unmanned Aerial Vehicles-Based Internet of Things Services: Comprehensive Survey and Future Perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Hildmann, H.; Kovacs, E. “Should I stay or should I go?”—Enabling autonomous mobile devices to optimize data collection performance. In RoboCity 2016—Robots for Citizens; Open Conference on Future Trends in Robotics; AFERTA SG S.L.: Madrid, Spain, 2016; Chapter 31. [Google Scholar]
- Almeida, M.; Hildmann, H. A development platform for the evaluation and validation of algorithms for self-organization in hybrid swarms. In RoboCity 2016—Robots for Citizens; Open Conference on Future Trends in Robotics; AFERTA SG S.L.: Madrid, Spain, 2016; Chapter 33. [Google Scholar]
- Hildmann, H.; Martin, M. Adaptive scheduling in dynamic environments. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems (FedCSIS), Warsaw, Poland, 7–10 September 2014; pp. 1331–1336. [Google Scholar]
- Hildmann, H.; Martin, M. Resource Allocation and Scheduling based on Emergent behaviours in Multi-Agent Scenarios. In Proceedings of the International Conference on Operations Research and Enterprise Systems, Lisbon, Portugal, 10–12 January 2015; pp. 140–147. [Google Scholar]
- Almeida, M.; Hildmann, H. Distributed UAV-swarm-based real-time geomatic data collection under dynamically changing resolution requirements. In Proceedings of the UAV-g 2017—International Conference on Unmanned Aerial Vehicles in Geomatics, in ISPRS Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Bonn, Germany, 4–7 September 2017. [Google Scholar]
- Giyenko, A.; Cho, Y.I. Intelligent Unmanned Aerial Vehicle Platform for Smart Cities. In Proceedings of the 2016 Joint 8th International Conference on Soft Computing and Intelligent Systems (SCIS) and 17th International Symposium on Advanced Intelligent Systems (ISIS), Sapporo, Japan, 25–28 August 2016; pp. 729–733. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, V.; Menéndez, H.D.; Camacho, D. Design and development of a lightweight multi-UAV simulator. In Proceedings of the 2015 IEEE 2nd International Conference on Cybernetics (CYBCONF), Gdynia, Poland, 24–26 June 2015; pp. 255–260. [Google Scholar] [CrossRef]
- Naphade, M.; Banavar, G.; Harrison, C.; Paraszczak, J.; Morris, R. Smarter Cities and Their Innovation Challenges. Computer 2011, 44, 32–39. [Google Scholar] [CrossRef]
- Yinbiao, S.; Lee, K.; Lanctot, P.; Jianbin, F.; Hao, H.; Chow, B.; Desbenoit, J.P.; Stephan, G.; Hui, L.; Guodong, X.; et al. Internet of Things: Wireless Sensor Networks; White Paper; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- Erol-Kantarci, M.; Mouftah, H. Wireless Sensor Networks for Cost-Efficient Residential Energy Management in the Smart Grid. IEEE Trans. Smart Grid 2011, 2, 314–325. [Google Scholar] [CrossRef]
- Yu, R.; Watteyne, T. Reliable, Low Power Wireless Sensor Networks for the Internet of Things: Making Wireless Sensors as Accessible as Web Servers; White Paper; Linear Technology: Milpitas, CA, USA, 2013. [Google Scholar]
- Giyenko, A.; Cho, Y.I. Intelligent UAV in smart cities using IoT. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 207–210. [Google Scholar] [CrossRef]
- Altawy, R.; Youssef, A.M. Security, Privacy, and Safety Aspects of Civilian Drones: A Survey. ACM Trans. Cyber-Phys. Syst. 2016, 1, 7. [Google Scholar] [CrossRef]
- Khan, A.; Rinner, B.; Cavallaro, A. Cooperative Robots to Observe Moving Targets: Review. IEEE Trans. Cybern. 2018, 48, 187–198. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Wang, W.; Leong, B. SkyStitch: A Cooperative Multi-UAV-based Real-time Video Surveillance System with Stitching. In Proceedings of the 23rd ACM International Conference on Multimedia, Brisbane, Australia, 26–30 October 2015; pp. 261–270. [Google Scholar] [CrossRef]
- Semsch, E.; Jakob, M.; Pavlicek, D.; Pechoucek, M. Autonomous UAV Surveillance in Complex Urban Environments. In Proceedings of the 2009 IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology, Milan, Italy, 15–18 September 2009; pp. 82–85. [Google Scholar] [CrossRef]
- Mohammed, F.; Idries, A.; Mohamed, N.; Al-Jaroodi, J.; Jawhar, I. UAVs for smart cities: Opportunities and challenges. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 267–273. [Google Scholar] [CrossRef]
- Hayajneh, A.M.; Zaidi, S.A.R.; McLernon, D.C.; Ghogho, M. Drone Empowered Small Cellular Disaster Recovery Networks for Resilient Smart Cities. In Proceedings of the 2016 IEEE International Conference on Sensing, Communication and Networking (SECON Workshops), London, UK, 27 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Madany, Y.M.; Elkamchouchi, H.M.; Ahmed, M.M. Modelling and Simulation of Robust Navigation for Unmanned Air Systems (UASs) Based on Integration of Multiple Sensors Fusion Architecture. In Proceedings of the 2013 European Modelling Symposium, Manchester, UK, 20–22 November 2013; pp. 719–724. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Pessin, G.; Filho, G.P.R.; Carvalho, A.C.; Furquim, G.; Ueyama, J. Fine-Tuning of UAV Control Rules for Spraying Pesticides on Crop Fields. In Proceedings of the 2014 IEEE 26th International Conference on Tools with Artificial Intelligence, Limassol, Cyprus, 10–12 November 2014; pp. 527–533. [Google Scholar] [CrossRef]
- Bupe, P.; Haddad, R.; Rios-Gutierrez, F. Relief and emergency communication network based on an autonomous decentralized UAV clustering network. In Proceedings of the SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Giagkos, A.; Wilson, M.S.; Tuci, E.; Charlesworth, P.B. Comparing approaches for coordination of autonomous communications UAVs. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1131–1139. [Google Scholar] [CrossRef]
- Giannini, C.; Shaaban, A.A.; Buratti, C.; Verdone, R. Delay Tolerant Networking for smart city through drones. In Proceedings of the 2016 International Symposium on Wireless Communication Systems (ISWCS), Poznan, Poland, 20–23 September 2016; pp. 603–607. [Google Scholar] [CrossRef]
- Guevara, K.; Rodriguez, M.; Gallo, N.; Velasco, G.; Vasudeva, K.; Guvenc, I. UAV-based GSM network for public safety communications. In Proceedings of the SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–2. [Google Scholar] [CrossRef]
- Kobayashi, T.; Matsuoka, H.; Betsumiya, S. Flying Communication Server in case of a Largescale Disaster. In Proceedings of the 2016 IEEE 40th Annual Computer Software and Applications Conference (COMPSAC), Atlanta, GA, USA, 10–14 June 2016; Volume 2, pp. 571–576. [Google Scholar] [CrossRef]
- Mase, K.; Okada, H. Message communication system using unmanned aerial vehicles under large-scale disaster environments. In Proceedings of the 2015 IEEE 26th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Hong Kong, China, 30 August–2 September 2015; pp. 2171–2176. [Google Scholar] [CrossRef]
- Rupasinghe, N.; Ibrahim, A.S.; Guvenc, I. Optimum Hovering Locations with Angular Domain User Separation for Cooperative UAV Networks. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Vattapparamban, E.; Güvenç, İ.; Yurekli, A.İ.; Akkaya, K.; Uluağaç, S. Drones for smart cities: Issues in cybersecurity, privacy, and public safety. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar] [CrossRef]
- Sterbenz, J.P. Drones in the Smart City and IoT: Protocols, Resilience, Benefits, and Risks. In Proceedings of the 2nd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Singapore, 26 June 2016; p. 3. [Google Scholar] [CrossRef]
- Won, J.; Seo, S.H.; Bertino, E. A Secure Communication Protocol for Drones and Smart Objects. In Proceedings of the 10th ACM Symposium on Information, Computer and Communications Security, Singapore, 14–17 April 2015; pp. 249–260. [Google Scholar] [CrossRef]
- Verykokou, S.; Doulamis, A.; Athanasiou, G.; Ioannidis, C.; Amditis, A. UAV-based 3D modelling of disaster scenes for Urban Search and Rescue. In Proceedings of the 2016 IEEE International Conference on Imaging Systems and Techniques (IST), Chania, Greece, 4–6 October 2016; pp. 106–111. [Google Scholar] [CrossRef]
- Choi, H.; Geeves, M.; Alsalam, B.; Gonzalez, F. Open source computer-vision based guidance system for UAVs on-board decision making. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Govindaraju, V.; Leng, G.; Qian, Z. Visibility-based UAV path planning for surveillance in cluttered environments. In Proceedings of the 2014 IEEE International Symposium on Safety, Security, and Rescue Robotics (2014), Hokkaido, Japan, 27–30 October 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Ezequiel, C.A.F.; Cua, M.; Libatique, N.C.; Tangonan, G.L.; Alampay, R.; Labuguen, R.T.; Favila, C.M.; Honrado, J.L.E.; Caños, V.; Devaney, C.; et al. UAV aerial imaging applications for post-disaster assessment, environmental management and infrastructure development. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 274–283. [Google Scholar] [CrossRef]
- Inata, H.; Say, S.; Ando, T.; Liu, J.; Shimamoto, S. Unmanned aerial vehicle based missing people detection system employing phased array antenna. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Mendonça, R.; Marques, M.M.; Marques, F.; Lourenço, A.; Pinto, E.; Santana, P.; Coito, F.; Lobo, V.; Barata, J. A cooperative multi-robot team for the surveillance of shipwreck survivors at sea. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, J.; Xiong, J.; Zhang, G.; Gu, F.; He, Y. Flooding disaster oriented USV UAV system development demonstration. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Valente, J.; Almeida, R.A.L. A Comprehensive Study of the Potential Application of Flying Ethylene-Sensitive Sensors for Ripeness Detection in Apple Orchards. Sensors 2019, 19, 372. [Google Scholar] [CrossRef] [PubMed]
- Xiong, M.; Zeng, D.; Yao, H.; Li, Y. A Crowd Simulation Based UAV Control Architecture for Industrial Disaster Evacuation. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Li, Y.; He, L.; Ye, X.; Guo, D. Geometric correction algorithm of UAV remote sensing image for the emergency disaster. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 6691–6694. [Google Scholar] [CrossRef]
- Mhatre, V.; Chavan, S.; Samuel, A.; Patil, A.; Chittimilla, A.; Kumar, N. Embedded video processing and data acquisition for unmanned aerial vehicle. In Proceedings of the 2015 International Conference on Computers, Communications, and Systems (ICCCS), Kanyakumari, India, 2–3 November 2015; pp. 141–145. [Google Scholar] [CrossRef]
- Skinnemoen, H. UAV amp; satellite communications live mission-critical visual data. In Proceedings of the 2014 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology, Yogyakarta, Indonesia, 13–14 November 2014; pp. 12–19. [Google Scholar] [CrossRef]
- Luo, C.; Nightingale, J.; Asemota, E.; Grecos, C. A UAV-Cloud System for Disaster Sensing Applications. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Pauner, C.; Kamara, I.; Viguri, J. Drones. Current challenges and standardisation solutions in the field of privacy and data protection. In Proceedings of the 2015 ITU Kaleidoscope: Trust in the Information Society (K-2015), Barcelona, Spain, 9–11 December 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Gamba, M.T.; Ugazio, S.; Marucco, G.; Pini, M.; Presti, L.L. Light weight GNSS-based passive radar for remote sensing UAV applications. In Proceedings of the 2015 IEEE 1st International Forum on Research and Technologies for Society and Industry Leveraging a better tomorrow (RTSI), Turin, Italy, 16–18 September 2015; pp. 341–348. [Google Scholar] [CrossRef]
- Chen, M.; Hu, Q.; Mackin, C.; Fisac, J.F.; Tomlin, C.J. Safe platooning of unmanned aerial vehicles via reachability. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 4695–4701. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 Febuary 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Saponara, S.; Neri, B. Radar sensor signal acquisition and 3D FFT processing for smart mobility surveillance systems. In Proceedings of the 2016 IEEE Sensors Applications Symposium (SAS), Catania, Italy, 20–22 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Nakata, R.; Clemens, S.; Lee, A.; Lubecke, V. RF techniques for motion compensation of an Unmanned Aerial Vehicle for remote radar life sensing. In Proceedings of the 2016 IEEE MTT-S International Microwave Symposium, San Francisco, CA, USA, 22–27 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Shariat, A.; Tizghadam, A.; Leon-Garcia, A. An ICN-based publish-subscribe platform to deliver UAV service in smart cities. In Proceedings of the 2016 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), San Francisco, CA, USA, 10–14 April 2016; pp. 698–703. [Google Scholar] [CrossRef]
- Bejiga, M.B.; Zeggada, A.; Melgani, F. Convolutional neural networks for near real-time object detection from UAV imagery in avalanche search and rescue operations. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 693–696. [Google Scholar] [CrossRef]
- Zhang, Y.; Ren, Z.; Liu, L.; Wei, C.; Yin, C. Design for a fast high precision UAV power emergency relief system. In Proceedings of the 4th Int. Conf. on Applied Robotics for the Power Industry (CARPI), Jinan, China, 11–13 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Scherer, J.; Rinner, B. Persistent multi-UAV surveillance with energy and communication constraints. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 1225–1230. [Google Scholar] [CrossRef]
- Reardon, C.; Fink, J. Air-ground robot team surveillance of complex 3D environments. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 320–327. [Google Scholar] [CrossRef]
- Reyad, M.; Arafa, M.; Sallam, E.A. An optimal PID controller for a qaudrotor system based on DE algorithm. In Proceedings of the 2016 11th International Conference on Computer Engineering Systems (ICCES), Cairo, Egypt, 20–21 December 2016; pp. 444–451. [Google Scholar] [CrossRef]
- Vasquez-Gomez, J.I.; Gomez-Castañeda, C.; Cote, E.M.D.; Herrera-Lozada, J.C. Multirotor UAV Coverage Planning under Wind Conditions. In Proceedings of the 2016 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE), Cuernavaca, Mexico, 22–25 November 2016; pp. 32–37. [Google Scholar] [CrossRef]
- Montanari, R.; Tozadore, D.C.; Fraccaroli, E.S.; Romero, R.A.F. Ground Vehicle Detection and Classification by an Unmanned Aerial Vehicle. In Proceedings of the 2015 12th Latin American Robotics Symposium and 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlandia, Brazil, 29–31 October 2015; pp. 253–258. [Google Scholar] [CrossRef]
- De Albuquerque, J.C.; de Lucena, S.C.; Campos, C.A.V. Evaluating data communications in disaster scenarios using opportunistic networks with Unmanned Aerial Vehicles. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1452–1457. [Google Scholar] [CrossRef]
- Khawaja, W.; Guvenc, I.; Matolak, D. UWB Channel Sounding and Modeling for UAV Air-to-Ground Propagation Channels. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Mora, A.; Vemprala, S.; Carrio, A.; Saripalli, S. Flight performance assessment of land surveying trajectories for multiple UAV platforms. In Proceedings of the 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancun, Mexico, 23–25 November 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Nugroho, G.; Satrio, M.; Rafsanjani, A.A.; Sadewo, R.R.T. Avionic system design Unmanned Aerial Vehicle for disaster area monitoring. In Proceedings of the 2015 International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation (ICAMIMIA), Surabaya, Indonesia, 15–17 October 2015; pp. 198–201. [Google Scholar] [CrossRef]
- Cook, Z.; Zhao, L.; Lee, J.; Yim, W. Unmanned aerial vehicle for hot-spot avoidance with stereo FLIR cameras. In Proceedings of the 12th Int. Conf. on Ubiquitous Robots and Ambient Intelligence, Goyang, Korea, 28–30 October 2015; pp. 318–319. [Google Scholar] [CrossRef]
- Cook, Z.; Zhao, L.; Lee, J.; Yim, W. Unmanned aerial system for first responders. In Proceedings of the 12th Int. Conf. on Ubiquitous Robots and Ambient Intelligence, Goyang, Korea, 28–30 October 2015; pp. 306–310. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Barrientos, A.; del Cerro, J.; Ribeiro, A.; Rossi, C. An Air-Ground Wireless Sensor Network for Crop Monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef]
- Lee, K.S.; Ovinis, M.; Nagarajan, T.; Seulin, R.; Morel, O. Autonomous patrol and surveillance system using unmanned aerial vehicles. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1291–1297. [Google Scholar] [CrossRef]
- Cai, C.; Carter, B.; Srivastava, M.; Tsung, J.; Vahedi-Faridi, J.; Wiley, C. Designing a radiation sensing UAV system. In Proceedings of the 2016 IEEE Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 29 April 2016; pp. 165–169. [Google Scholar] [CrossRef]
- Foina, A.G.; Sengupta, R.; Lerchi, P.; Liu, Z.; Krainer, C. Drones in smart cities: Overcoming barriers through air traffic control research. In Proceedings of the 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancun, Mexico, 23–25 November 2015; pp. 351–359. [Google Scholar] [CrossRef]
- Liu, Y.; Lv, R.; Guan, X.; Zeng, J. Path planning for unmanned aerial vehicle under geo-fencing and minimum safe separation constraints. In Proceedings of the World Congress on Int. Control and Automation, Guilin, China, 12–15 June 2016; pp. 28–31. [Google Scholar] [CrossRef]
- Borreguero, D.; Velasco, O.; Valente, J. Experimental Design of a Mobile Landing Platform to Assist Aerial Surveys in Fluvial Environments. Appl. Sci. 2018, 9, 38. [Google Scholar] [CrossRef]
- Cross, A.R. Drones for Disaster Response and Relief Operations. Report; Measure (32 Advisors Company). 2015. Available online: www.issuelab.org/resources/21683/21683.pdf (accessed on 24 July 2019).
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the Sky: Leveraging UAVs for Disaster Management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Rokhmana, C.A.; Andaru, R. Utilizing UAV-based mapping in post disaster volcano eruption. In Proceedings of the 2016 6th International Annual Engineering Seminar (InAES), Yogyakarta, Indonesia, 1–3 August 2016; pp. 202–205. [Google Scholar] [CrossRef]
- McNutt, M. Preparing for the next Katrina. Science 2015, 349, 905. [Google Scholar] [CrossRef]
- Plag, H.P. Foreword: Extreme geohazards—A growing threat for a globally interconnected civilization. Nat. Hazards 2014, 72, 1275–1277. [Google Scholar] [CrossRef]
- Morito, T.; Sugiyama, O.; Kojima, R.; Nakadai, K. Partially Shared Deep Neural Network in sound source separation and identification using a UAV-embedded microphone array. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1299–1304. [Google Scholar] [CrossRef]
- McGonigle, A.J.S.; Aiuppa, A.; Giudice, G.; Tamburello, G.; Hodson, A.J.; Gurrieri, S. Unmanned aerial vehicle measurements of volcanic carbon dioxide fluxes. Geophys. Res. Lett. 2008, 35, L06303. [Google Scholar] [CrossRef]
- Astuti, G.; Giudice, G.; Longo, D.; Melita, C.D.; Muscato, G.; Orlando, A. An Overview of the “Volcan Project”: An UAS for Exploration of Volcanic Environments. J. Int. Robot. Syst. 2009, 54, 471–494. [Google Scholar] [CrossRef]
- Astuti, G.; Longo, D.; Melita, C.D.; Muscato, G.; Orlando, A. HIL Tuning of UAV for Exploration of Risky Environments. Int. J. Adv. Robot. Syst. 2008, 5, 36. [Google Scholar] [CrossRef]
- Aljehani, M.; Inoue, M. Multi-UAV tracking and scanning systems in M2M communication for disaster response. In Proceedings of the 2016 IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016; pp. 1–2. [Google Scholar] [CrossRef]
- Small, E.E.; Larson, K.M.; Braun, J.J. Sensing vegetation growth with reflected GPS signals. Geophys. Res. Lett. 2010, 37, L12401. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Aguasca, A.; Valencia, E.; Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Park, H.; Vall-llossera, M. Snow Thickness Monitoring Using GNSS Measurements. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1109–1113. [Google Scholar] [CrossRef]
- Garrison, J.L.; Katzberg, S.J.; Hill, M.I. Effect of sea roughness on bistatically scattered range coded signals from the Global Positioning System. Geophys. Res. Lett. 1998, 25, 2257–2260. [Google Scholar] [CrossRef]
- Ichim, L.; Popescu, D. Remote image classification based on patch dissimilarity. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 1186–1191. [Google Scholar] [CrossRef]
- Mukherjee, A.; Chakraborty, S.; Azar, A.T.; Bhattacharyay, S.K.; Chatterjee, B.; Dey, N. Unmanned aerial system for post disaster identification. In Proceedings of the International Conference on Circuits, Communication, Control and Computing, Bangalore, India, 21–22 November 2014; pp. 247–252. [Google Scholar] [CrossRef]
- Wang, J.; Shake, T.; Deutsch, P.; Coyle, A.; Cheng, B.N. Topology management algorithms for large-scale aerial high capacity directional networks. In Proceedings of the MILCOM 2016—2016 IEEE Military Communications Conference, Baltimore, MD, USA, 1–3 November 2016; pp. 343–348. [Google Scholar] [CrossRef]
- Thamrin, N.M.; Arshad, N.H.M.; Adnan, R.; Sam, R.; Razak, N.A.; Misnan, M.F.; Mahmud, S.F. Simultaneous localization and mapping based real-time inter-row tree tracking technique for unmanned aerial vehicle. In Proceedings of the IEEE Int. Conf. on Control System, Computing and Engineering, Penang, Malaysia, 23–25 November 2012; pp. 322–327. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, W.; Chen, Y.; Ke, F.; Chu, X.; Chen, C.L.P. Neural-Dynamic Optimization-Based Model Predictive Control for Tracking and Formation of Nonholonomic Multirobot Systems. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 6113–6122. [Google Scholar] [CrossRef]
- Watai, T.; Machida, T.; Ishizaki, N.; Inoue, G. A Lightweight Observation System for Atmospheric Carbon Dioxide Concentration Using a Small Unmanned Aerial Vehicle. J. Atmos. Ocean. Technol. 2006, 23, 700–710. [Google Scholar] [CrossRef]
- Khan, A.; Schaefer, D.; Tao, L.; Miller, D.J.; Sun, K.; Zondlo, M.A.; Harrison, W.A.; Roscoe, B.; Lary, D.J. Low Power Greenhouse Gas Sensors for Unmanned Aerial Vehicles. Remote Sens. 2012, 4, 1355–1368. [Google Scholar] [CrossRef]
- Berman, E.S.; Fladeland, M.; Liem, J.; Kolyer, R.; Gupta, M. Greenhouse gas analyzer for measurements of carbon dioxide, methane, and water vapor aboard an unmanned aerial vehicle. Sens. Actuators B Chem. 2012, 169, 128–135. [Google Scholar] [CrossRef]
- Saggiani, G.; Persiani, F.; Ceruti, A.; Tortora, P.; Troiani, E.; Giuletti, F.; Amici, S.; Buongiorno, M.; Distefano, G.; Bentini, G.; et al. A UAV System for Observing Volcanoes and Natural Hazards. In AGU Fall Meeting Abstracts; American Geophysical Union: Washington, DC, USA, 2007. [Google Scholar]
- Rojas, A.J.; Gonzalez, L.F.; Motta, N.; Villa, T.F. Design and flight testing of an integrated solar powered UAV and WSN for remote gas sensing. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Pyle, D.; Mather, T.; Biggs, J. Remote Sensing of Volcanoes and Volcanic Processes: Integrating Observation and Modelling; Geological Society of London, Special Publucations, Geological Society: London, UK, 2014. [Google Scholar]
- Gleason, S.; Gebre-Egziabher, D. GNSS Applications and Methods; GNSS technology and applications series; Artech House: Norwood, MA, USA, 2009. [Google Scholar]
- Shuanggen, J.; Cardellach, E.; Xie, F. GNSS Remote Sensing: Theory, Methods and Applications; Remote Sensing and Digital Image Processing; Springer Netherlands: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Misnan, M.F.; Arshad, N.H.M.; Shauri, R.L.A.; Razak, N.A.; Thamrin, N.M.; Mahmud, S.F. Real-time vision based sensor implementation on unmanned aerial vehicle for features detection technique of low altitude mapping. In Proceedings of the 2013 IEEE Conference on Systems, Process Control (ICSPC), Kuala Lumpur, Malaysia, 13–15 December 2013; pp. 289–294. [Google Scholar] [CrossRef]
- Zermas, D.; Teng, D.; Stanitsas, P.; Bazakos, M.; Kaiser, D.; Morellas, V.; Mulla, D.; Papanikolopoulos, N. Automation solutions for the evaluation of plant health in corn fields. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 6521–6527. [Google Scholar] [CrossRef]
- Valente, J.; Roldán, J.; Garzón, M.; Barrientos, A. Towards Airborne Thermography via Low-Cost Thermopile Infrared Sensors. Drones 2019, 3, 30. [Google Scholar] [CrossRef]
- Boubeta-Puig, J.; Moguel, E.; Sánchez-Figueroa, F.; Hernández, J.; Preciado, J.C. An Autonomous UAV Architecture for Remote Sensing and Intelligent Decision-making. IEEE Internet Comput. 2018, 22, 6–15. [Google Scholar] [CrossRef]
- Ruangwiset, A. The application of unmanned aerial vehicle to precision agriculture: Verification experiments of the power consumption. In Proceedings of the 2014 International Conference on Information Science, Electronics and Electrical Engineering, Sapporo, Japan, 26–28 April 2014; pp. 968–971. [Google Scholar] [CrossRef]
- Tokekar, P.; Hook, J.V.; Mulla, D.; Isler, V. Sensor planning for a symbiotic UAV and UGV system for precision agriculture. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5321–5326. [Google Scholar] [CrossRef]
- Pang Chin, W.; Ntafos, S. Optimum watchman routes. Inf. Process. Lett. 1988, 28, 39–44. [Google Scholar] [CrossRef]
- Ntafos, S. Watchman routes under limited visibility. Comput. Geom. 1992, 1, 149–170. [Google Scholar] [CrossRef]
- Hildmann, H.; Nicolas, S.; Saffre, F. Energy optimisation of the wireless access network through aggregation of mobile terminals. In Proceedings of the Fed. Conf. on Comp. Sci. and Information Systems, Wroclaw, Poland, 9–12 September 2012; pp. 1229–1234. [Google Scholar]
- Hildmann, H.; Nicolas, S. A self-organizing client/server allocation algorithm for applications with non-linear cost functions. In Proceedings of the IEEE PES Innovative Smart Grid Technologies L.A. (2015 ISGT-LA), Montevideo, Uruguay, 5–7 October 2015. [Google Scholar]
- Hildmann, H.; Nicolas, S.; Saffre, F. A bio-inspired resource-saving approach to dynamic client-server association. IEEE Intell. Syst. 2012, 27, 17–25. [Google Scholar] [CrossRef]
- Saffre, F.; Hildmann, H.; Deneubourg, J.L. Can individual heterogeneity influence self-organised patterns in the termite nest construction model? Swarm Intell. 2017, 12, 101–110. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | WAN | RS | RTM | SAR | GL | INT | SI |
|---|---|---|---|---|---|---|---|
| [29] | x | x | x | x | |||
| [30] | x | x | |||||
| [31] | x | x | x | x | |||
| [32] | x | ||||||
| [33] | x | ||||||
| [34] | x | ||||||
| [10] | x | x | x | x | x | x | x |
| Year | Disaster | W | R | SR | RM | SI | DE |
|---|---|---|---|---|---|---|---|
| 2005 | Hurricane Katrina Response (USA) | x | x | x | |||
| x | x | x | |||||
| 2005 | Hurricane Katrina Recovery (USA) | x | x | ||||
| 2005 | Hurricane Wilma (USA) | x | x | x | |||
| 2007 | Berkman Plaza II Collapse (USA) | x | x | ||||
| 2009 | L’aquilla Earthquake (I) | x | x | x | |||
| 2009 | Typhoon Morakot (TW) | x | x | ||||
| 2010 | Haiti Earthquake (HT) | x | x | ||||
| 2011 | Christchurch Earthquake (NZ) | x | x | ||||
| 2011 | Tohotu Earthquake (JP) | ? | x | ||||
| 2011 | Fukushima Nuclear Emergency (JP) | x | x | ||||
| x | x | x | |||||
| 2011 | Evangelos Florakis Explosion (CY) | x | x | x | |||
| 2011 | Thailand Floods (TH) | x | x | ||||
| 2012 | Finale Emilia Earthquake (I) | x | x | ||||
| 2013 | Typhoon Haiyan (PH) | x | x | ||||
| 2013 | Lushan Earthquake (CH) | x | x | x | x | ||
| 2013 | Boulder Colorado Floods (USA) | x | x | ||||
| 2014 | SR530 Mudslides Response (USA) | x | x | ||||
| x | x | ||||||
| 2014 | SR530 Mudslides Recovery (USA) | x | x | ||||
| x | x | ||||||
| 2014 | Balkans Flooding (CS, BIH) | x | x | ||||
| 2014 | Collbran Landslide (USA) | x | x | x | |||
| x | x | x | |||||
| 2014 | Yunnan Earthquake (CH) | x | x | ||||
| 2015 | Bennet Landfill SC (USA) | x | x | ||||
| Drone Type | Pros | Cons | Applications | Price (US$) |
|---|---|---|---|---|
| Fixed-wing | Large area | Price, | Area survey | $20k–$150k |
| coverage | Launching and | Structural | ||
| landing | inspection | |||
| Rotary-wing | Large payload, | Price | Inspection, | $20k–$150k |
| (helicopter) | Hovering | Supply drops | ||
| Rotary-wing | Price | Small payload, | Inspection, | $3k–$50k |
| (multicopter) | Availability | Short flight | Filmography, | |
| Hovering | Photography |
| Ref | Type | Payload | Application |
|---|---|---|---|
| [122] | UAV | 3.5 kg | monitoring atmospheric CO2 concentration |
| [110] | helicopter | 3 kg | measurements of volcanic gases (SO2 and CO2) |
| [123] | helicopter | 5 kg | mapping of local greenhouse gas concentrations |
| [111] | fixed wing | measurements of volcanic gases (SO2 and CO2) | |
| [124] | fixed wing | 40 kg | analysing atmospheric gases |
| [125] | fixed wing | 56 kg | detecting atmospheric trace gases |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hildmann, H.; Kovacs, E. Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety. Drones 2019, 3, 59. https://doi.org/10.3390/drones3030059
Hildmann H, Kovacs E. Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety. Drones. 2019; 3(3):59. https://doi.org/10.3390/drones3030059
Chicago/Turabian StyleHildmann, Hanno, and Ernö Kovacs. 2019. "Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety" Drones 3, no. 3: 59. https://doi.org/10.3390/drones3030059
APA StyleHildmann, H., & Kovacs, E. (2019). Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety. Drones, 3(3), 59. https://doi.org/10.3390/drones3030059