1. Introduction
Recently, the use of unmanned aerial systems (UASs) has progressed from military to civilian applications such as homeland security, rapid-response disaster surveillance, ecological monitoring, earth science research, and humanitarian observations [
1,
2]. Steady improvements in small-scale technology have allowed UASs to become an alternative remote sensing platform offering on-demand high-resolution data at inexpensive rates [
3]. High-resolution imagery collected by UASs can be used to produce high-density point clouds generated by image matching and photogrammetric techniques that rival similar Light Detection and Ranging (LiDAR) platforms for a fraction of the cost [
4]. UAS users also have greater control over the temporal scale at which they can collect data, rather than relying on the schedules of airplane pilots and satellites.
The ubiquity and relatively-low cost of UASs and the ever-increasing types of applications and questions that can benefit from the use of UASs has resulted in a growing demand for the collection of these ultra-high spatial resolution data across many platforms and sensor types (visible, multispectral, thermal, LiDAR imagery). The proliferation of data has resulted in rapid advances in imagery processing with commercial software, making algorithms faster and more user-friendly compared to more traditional methods of aerial stereophotogrammetry. Commercially available software such as AgiSoft Photoscan and Pix4Dmapper Pro are capable of generating the high-quality products that are in demand for environmental remote sensing applications. Despite the ubiquity and relatively “canned workflows”, new users often have little previous experience with imagery processing and thus, make processing decisions that may have important implications on their resulting products, often with limited awareness. Even experienced users may make choices in their parameterization without understanding the implications of their decision-making on the final products generation. To our knowledge, no literature exists that quantitatively assesses the effects of making small, incremental variations in some of the key processing parameters in structure-from-motion photogrammetric processing workflows and how those affect resulting UAS imagery-derived products. Gross and Heumann [
5] report what they consider to be the optimal parameters for processing UAS-collected imagery in multiple software systems based on reviews of user’s manuals and “trial and error,” but do not provide an in-depth analysis and discussion of parameterization over the full range of options within each software system. In many cases, parameterization may be context-specific, where some parameter values may be more suitable for certain land-use types than others, thus the parameters suggested in Gross and Heumann [
5] may be ill suited for application across disparate types of projects.
Our research quantitatively and qualitatively assesses the effects of varying two key processing parameters in the structure-from-motion processing workflow, specifically the
keypoint image scale and
image scale used in point cloud densification, on the resultant point clouds, orthomosaics, and digital surface models using Pix4Dmapper Pro by Pix4D (hereon referred to as Pix4D) [
6]. Previous UAS work by Frasier and Congalton [
7] over a forested plot at different flight heights using RGB (SenseFly S.O.D.A. sensor) and multispectral (the Parrot Sequoia sensor) platforms conducted image processing in both Pix4D and Agisoft. However, they only used a singular
keypoint image scale and image scale for point cloud densification parameter setting in Pix4D for their comparison. Those choices were made to reduce scene complexity while extracting visual information and to further simplify raw image geometry while computing 3D coordinates, and they noted that those two parameter selections would lead to faster processing in complex landscapes but could influence accuracy. However, they did not investigate the degree and magnitude of changes in accuracies in the resulting derived products. Sona et al. [
8] also compared outputs from multiple imagery processing software packages and found AgiSoft Photoscan to perform the best overall; however, the authors did not state explicitly what parameter values they used or why they had chosen them. They did note that when comparing Pix4D and AgiSoft, the former identified fewer matching points than the latter, but Pix4D was able to detect points visible in more images. Furthermore, most studies conducting product accuracy comparisons among software and processing workflows tend to primarily focus on assessing geometric accuracies with little to no indication of what actual processing parameters were used or how and why specific ones were chosen [
5,
8,
9].
Our overarching research question was “how does the choice of processing parameters during the structure-from-motion image processing workflow affect intermediary and final photogrammetric outputs from visible and multispectral imagery and how reliably can multispectral imagery be used to create three-dimensional objects compared to RGB despite significant spatial resolution differences?” We specifically assess the effect of varying the keypoint image scale through all available settings in the leading UAS imagery processing software (Pix4Dmapper Pro) and of simultaneously varying image scale for point cloud densification settings on multiple variables including the calibrated image percent, median number of matches per calibrated image, the number of 2D and 3D keypoints observed for bundle block adjustment, mean image reprojection error, the number of 3D densified points and average point density. We present quantitative assessments and corresponding image-based visualizations during intermediary and final UAS product generation for both visible and multispectral imagery collected using a fixed-wing professional mapping small UAS. Finally, we quantitatively assess the differences between multispectral and RGB imagery to determine whether multispectral imagery, though significantly less detailed in terms of spatial resolution (ground sampling distance) typically, can be considered a reliable source for three-dimensional surfaces such as digital surface and digital terrain models.
2. Background
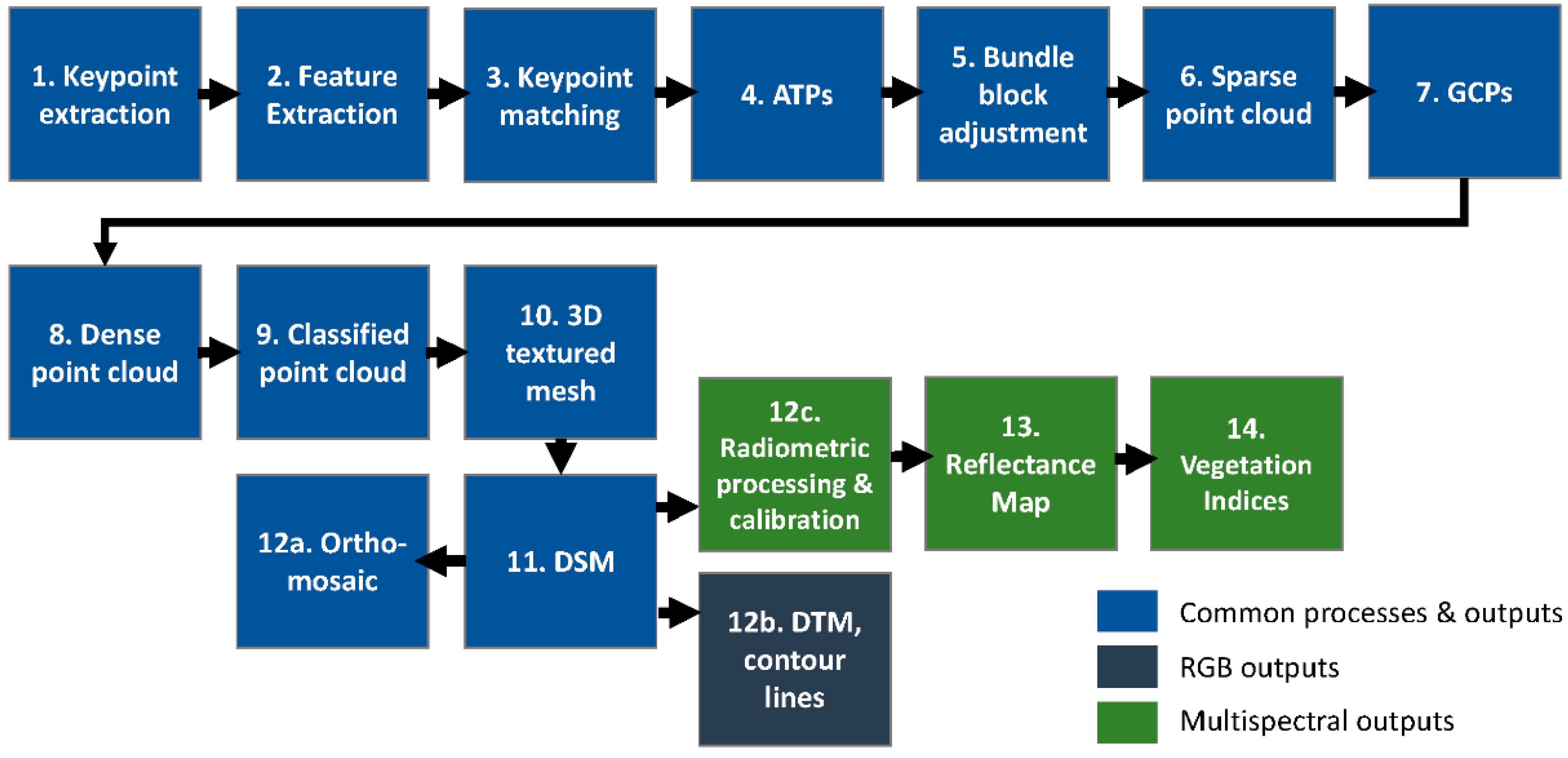
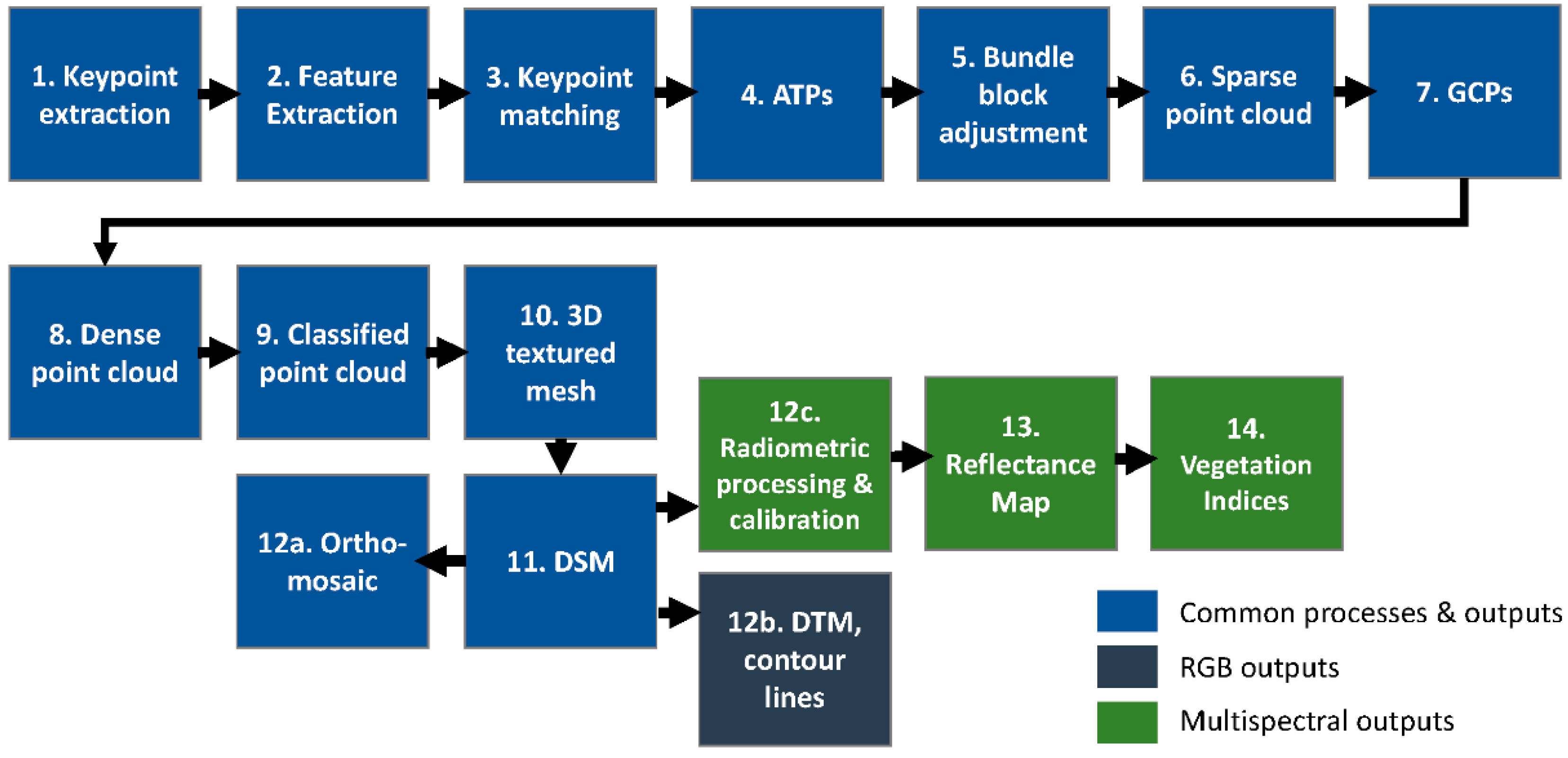
Pix4D uses a modified structure-from-motion, or SFM, approach to process UAS imagery (
Figure 1). SFM is a photogrammetric technique used to estimate the three-dimensional (3D) structure of objects from multiple two-dimensional (2D) offset image sequences resulting from the motion of a camera mounted on platforms such as UASs [
10]. The initial stages of the process begin with feature extraction and the identification and matching of keypoints, or spatial locations or points in the image that are highly distinctive or stand out in the image. Keypoints are distinctive because no matter how the image is rotated or scaled, the same keypoints have a high probability of identification from a large database of features and many images [
11].
There are several algorithms that can be used for keypoint matching and feature extraction such as the Scale-Invariant Feature Transform (SIFT) [
11], Speeded-Up Robust Features (SURF) [
12], Binary Robust Invariant Scalable Keypoints (BRISK) [
13], among others. Given the proprietary nature of Pix4D, the specific feature extraction algorithm used by the software is unknown by users. In Pix4D, the user may identify the
keypoint image scale, or the image size at which keypoints are extracted. The values for this parameter range from one-eighth (
1/
8) to two (2). When selecting a
keypoint image scale below the original image size, the user can expect a reduction in accuracy because in general, fewer keypoints matched are computed. A decrease in the number of keypoints matched means that there is less confidence of placing a point correctly, whereas more matches means a higher degree of confidence.
A tie point is a specific location that is recognizable in the overlap area between multiple images. Automatic tie points (ATPs) are 3D points that correspond to an automatically detected keypoint and subsequently matched in the images, and allowing the computation to progress from image space to object space. ATPs do not have known ground coordinates but instead, identify relationships between images and are also used in the calibration of images. ATPs and ground control points (GCPs) are then used in the bundle block adjustment (BBA) before the low-density point cloud (LDPC) is constructed. In Pix4D, the BBA is calculated using the relationship between overlapping images, keypoints, and GCPs, and the specific internal camera parameters and adjustments are applied to images within each specific block.
After the generation of the LDPC, the high-density point cloud (HDPC) is created based on the image scale defined by the user. Image scale defines the scale in relation to the original image size at which additional 3D points are generated. In Pix4D, the values for image scale range from one-eighth (1/8) to full (1), in ¼ increments.
The final processing steps in Pix4D include the generation of the 3D textured mesh (a triangular surface overlaid on the HDPC), surface models including the digital surface model (DSM) and digital terrain model (DTM), and the orthomosaic. The orthomosaic is obtained from the DSM and corrected for perspective, with the value of each pixel calculated as an average of the pixels in the corresponding original images. All aforementioned steps are applicable to processing both RGB and multispectral imagery. With multispectral imagery processing, the user may create additional reflectance layers, as well as compute indices such as the Normalized Difference Vegetation Index (NDVI).
4. Results and Discussion
Our overarching goal was to understand how the choice of processing parameters during standard structure-from-motion photogrammetric imagery processing workflow influences final outputs (orthomosaics and derived DSM). Using an exploratory two-sample t-test to compare metrics generated from RGB imagery processing trials to metrics from multispectral processing trials over the exact same areal extent of collection, we determined that all variables of comparison are statistically different from one another except for the resulting number of 2D keypoints (2DKP). This indicates that, for the same areal extent and constant altitude of imagery collection, the major quantitative metrics of interest (calibrated image percent, median number of matches per calibrated image, the number of 3D keypoints observed for bundle block adjustment, mean image reprojection error, the number of 3D densified points and average point density) vary significantly between RGB and multispectral imagery collection (
Table 4), as would be expected based on the differences in spatial resolution and total number of pixels available for calculating these metrics. The actual GSD and geolocation error values are presented in
Table 5.
To understand how processing parameter choice affects intermediary product generation (i.e., the metrics listed in
Table 4 and
Supplementary Materials Tables S1 and S2) we compare: (1) effects
within RGB and multispectral imagery individually; and (2) effects
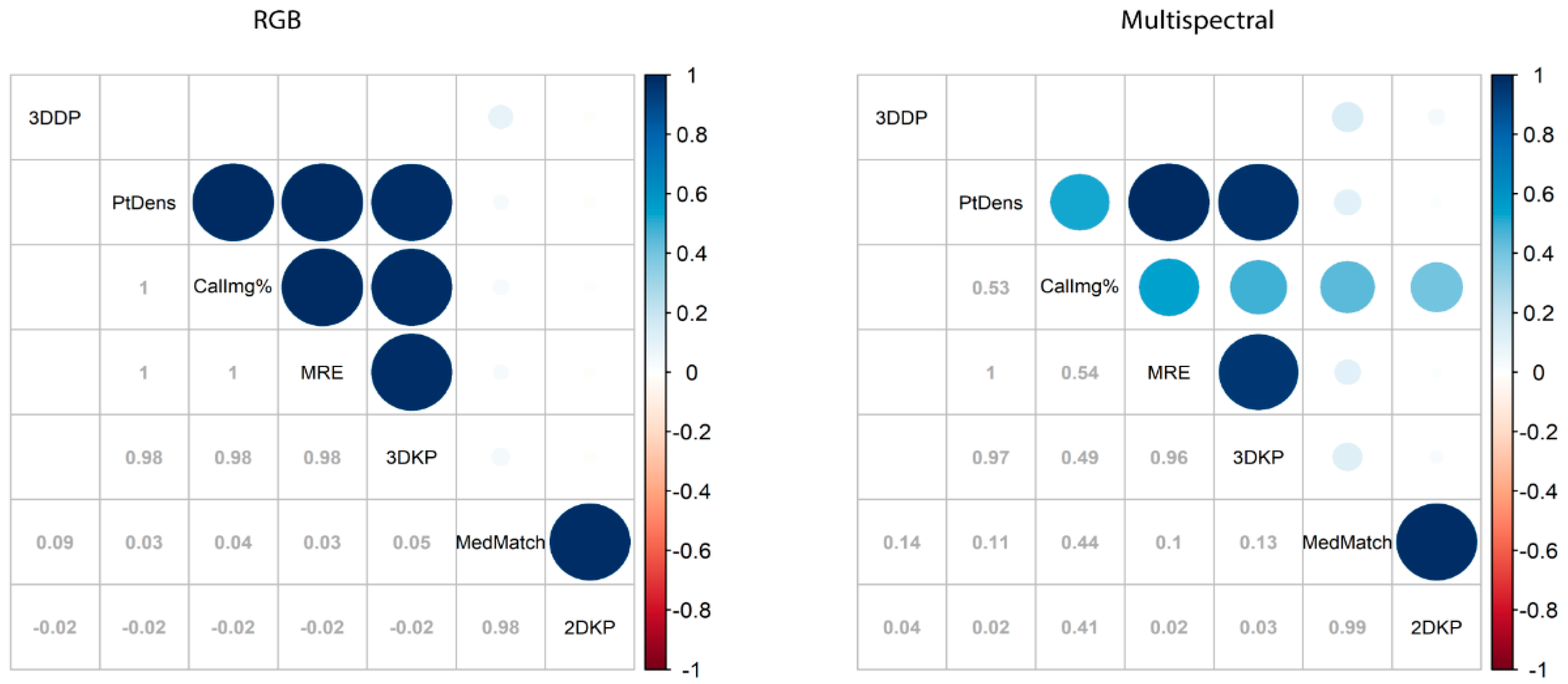
between RGB and multispectral imagery. We performed correlation analyses and present results as a correlogram (
Figure 3) and discuss only results that were statistically significant (
p = 0.05). We found that the number of median matches (MedMatch) and 2D densified keypoints (2DKP) are perfectly correlated (0.99,
Figure 3) for both RGB and multispectral imagery, which is to be expected given that these metrics are both derived from the number of 2D keypoints computed. We also observed similar correlations between total point density (PtDens) and the number of 3D points used in the bundle block adjustment (3DKP), which had high correlation values of 0.98 for RGB and 0.97 for multispectral (
Figure 3). Similarly, we found that 3DKP and the mean reprojection error (MRE) were almost perfectly correlated (0.98 for RGB and 0.96 for multispectral,
Figure 3). There were also some parameter combinations that did not exhibit the same degree of correlation in both RGB and multispectral, such as: calibrated image percent and point density (1 for RGB and 0.53 for multispectral), calibrated image percent and 3DKP (1 for RGB and 0.54 for multispectral), calibrated image percent and median matches (0.05 for RGB and 0.44 for multispectral), and calibrated image percent and 2DKP (0.03 for RGB and 0.41 for multispectral).
When considering 3D relationships, we observed that there is a weak relationship between the number of 3DDP and most other variables, including the percent calibrated images in both RGB and multispectral data. However, 3DDP is significantly weakly correlated with the number of median matches (0.09 for RGB and 0.14 for multispectral,
Figure 3), which means that the number of 2DKP potentially plays the biggest role in determining the number of final 3DDP. This means that to maximize 3DDP without significant losses in the effective area covered during processing, flight footprints must be increased during mission planning. One interesting finding is that, despite the high correlation between percent calibrated images and MRE and percent calibrated images and 3DDP for RGB imagery processing (1 and 0.98, respectively), the same relationships were not observed for multispectral imagery (
Figure 3). The implication is that regardless of how many calibrated images may exist for a given flight area, a much higher number of 2DKP can be extracted in RGB relative to multispectral imagery. However, high image calibration is critical to ensuring the highest number of 2DKP are generated in any given set of imagery.
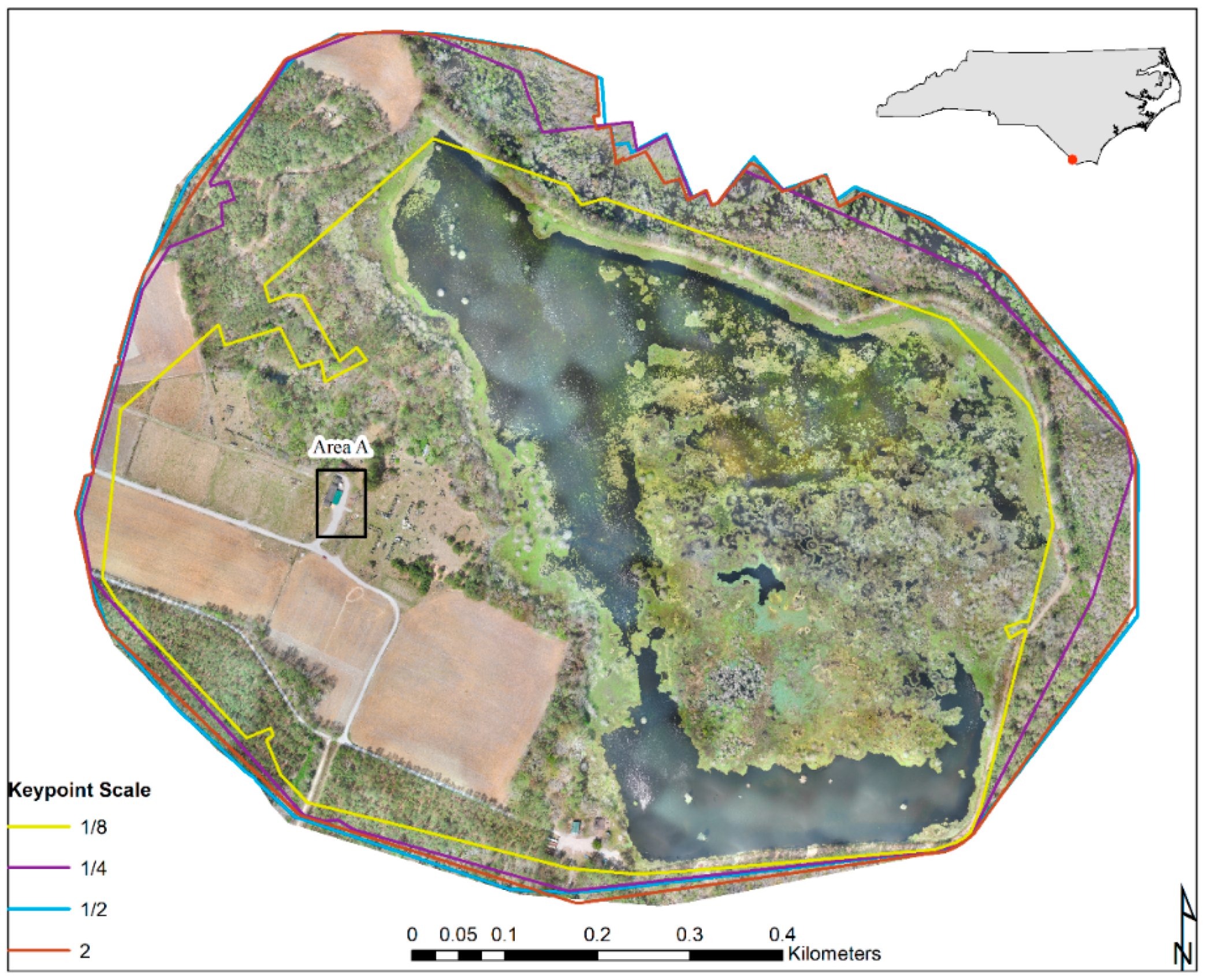
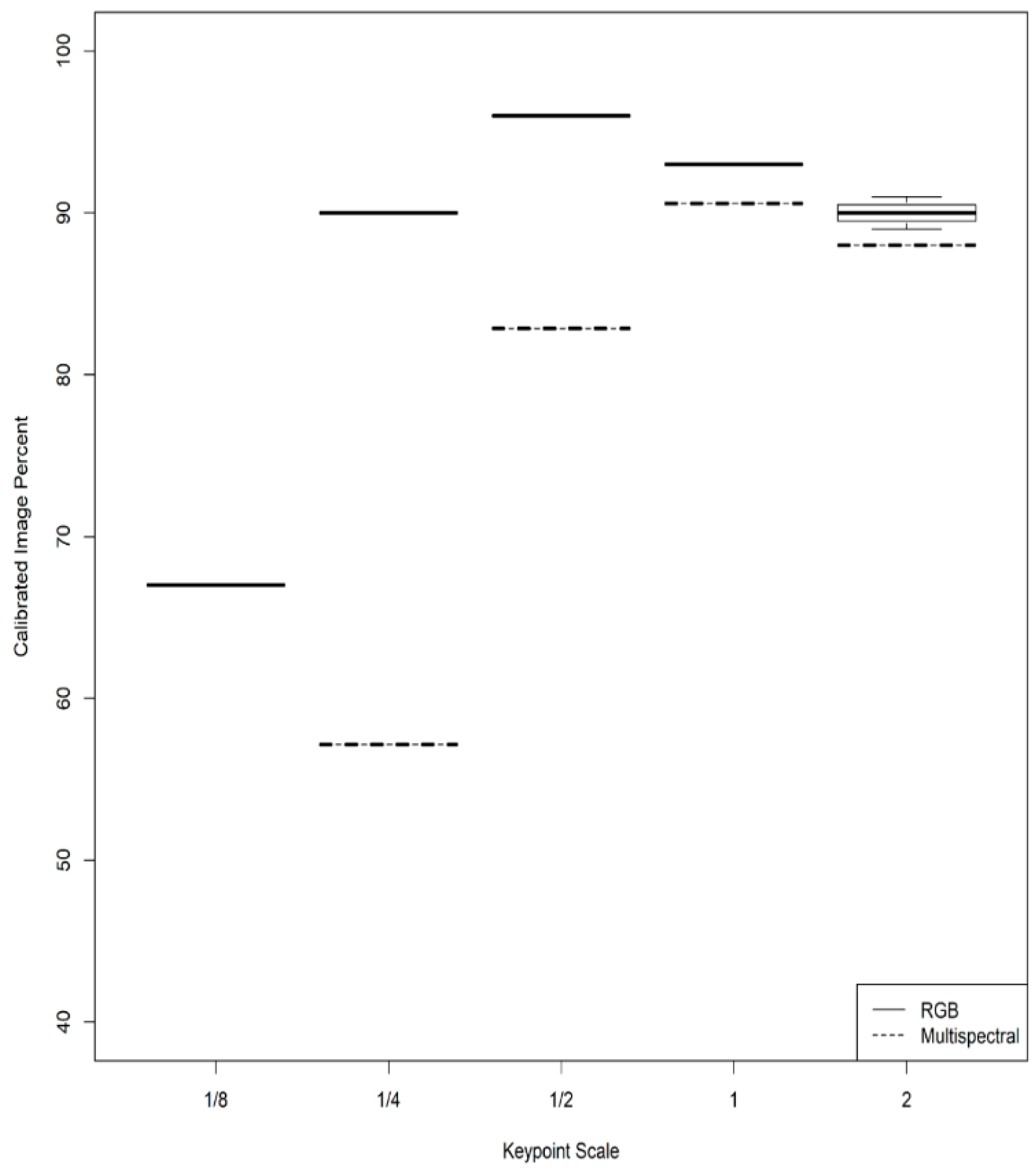
For both RGB and multispectral, we observed a similar pattern in terms of the percent calibrated images: image calibration peaked (at ½ keypoint scale for RGB and full (1) for multispectral), after which, calibrated image percent declined (
Figure 4). The variation in percent calibrated images, in turn, affected the final areal extent of the orthomosaic generated because areas with poor calibration were excluded (
Figure 2 and
Table 1). At most keypoint scales, varying the image scale had no effect on the percent of calibrated images (i.e., the percent of calibrated images was the same at all image scales when keypoint scale remained constant;
Figure 4). An exception occurred at two (2) keypoint scale using RGB imagery, where there is a slight variation between the different processing iterations as the image scale was varied. It is possible that this is not due to variation in image scale alone and may occur due to internal variation within the algorithm used by Pix4D. The patterns we observed mimic a diminishing returns function because the calibration will be computationally intensive and result in a lower calibration (
Figure 4). This may be especially noticeable for landscapes that are heavily vegetated or very homogeneous due to the limited number of available 2DKP that can be extracted from the imagery.
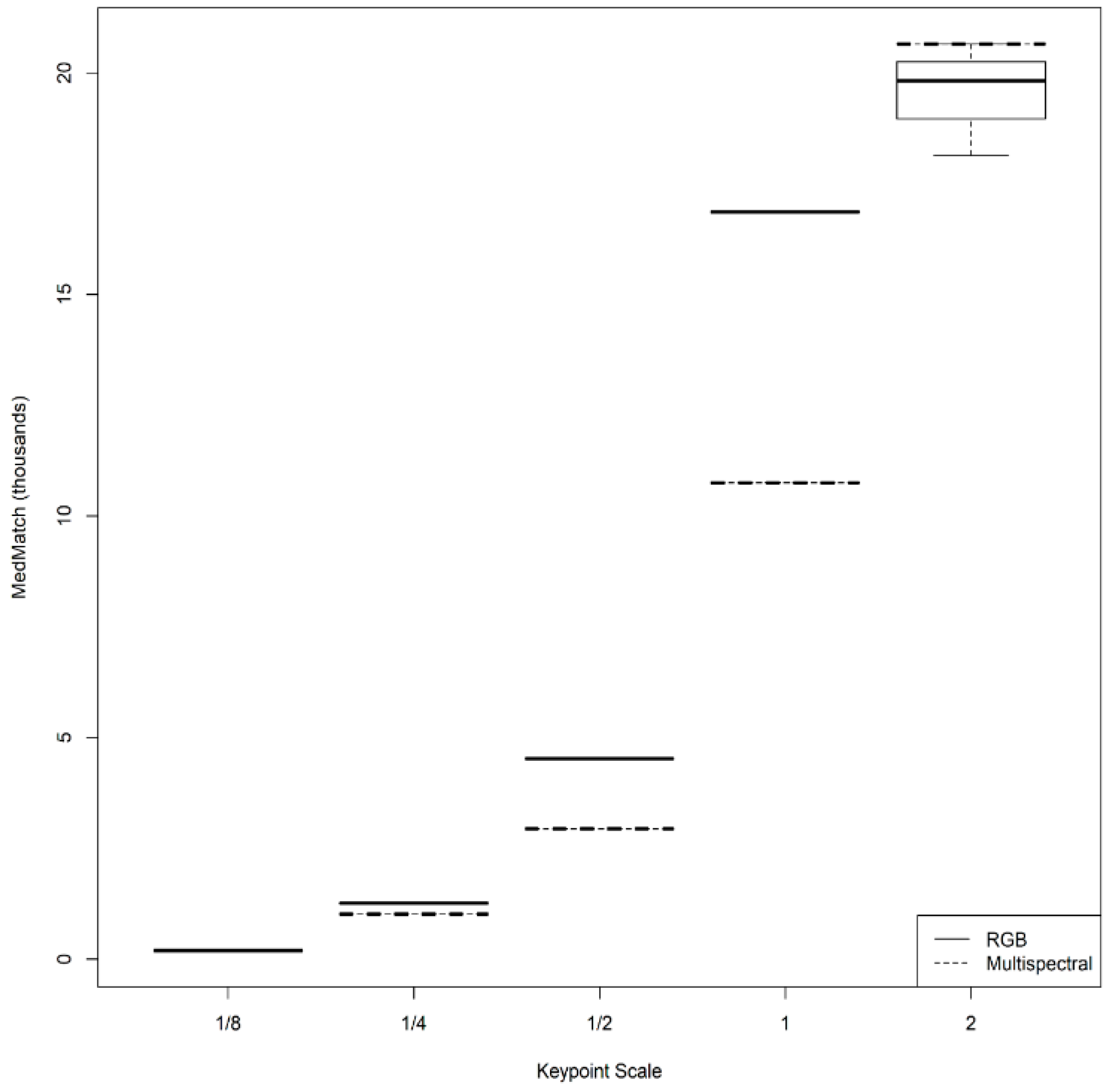
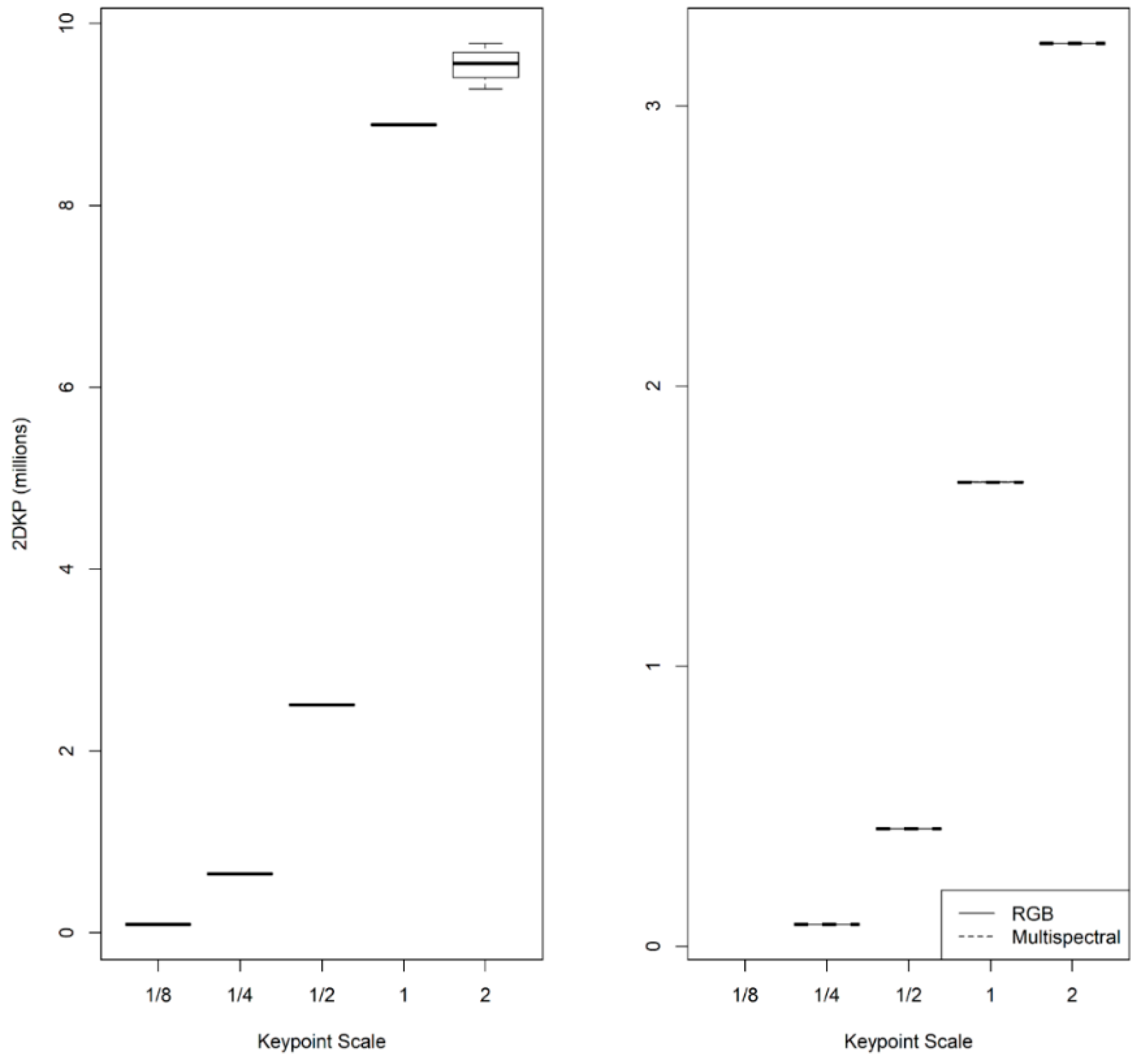
A higher number of median matches for RGB over multispectral imagery was observed for all keypoint image scales except for two (2) where multispectral was higher that RGB, and 1/8 image scale for multispectral imagery where processing failed. There was some variation at two (2) keypoint scale for RGB depending on the image scale for point cloud densification, which is the only instance where there was variation. The patterns we observed mimic an exponential growth curve (
Figure 5), and while it is true that a higher number of median matches can be achieved with a higher keypoint scale, computational time will also increase. Additionally, the calibrated image percent will be lower at two (2) keypoint scale so the increase in number of median matches would actually be made among fewer images (
Figure 4 and
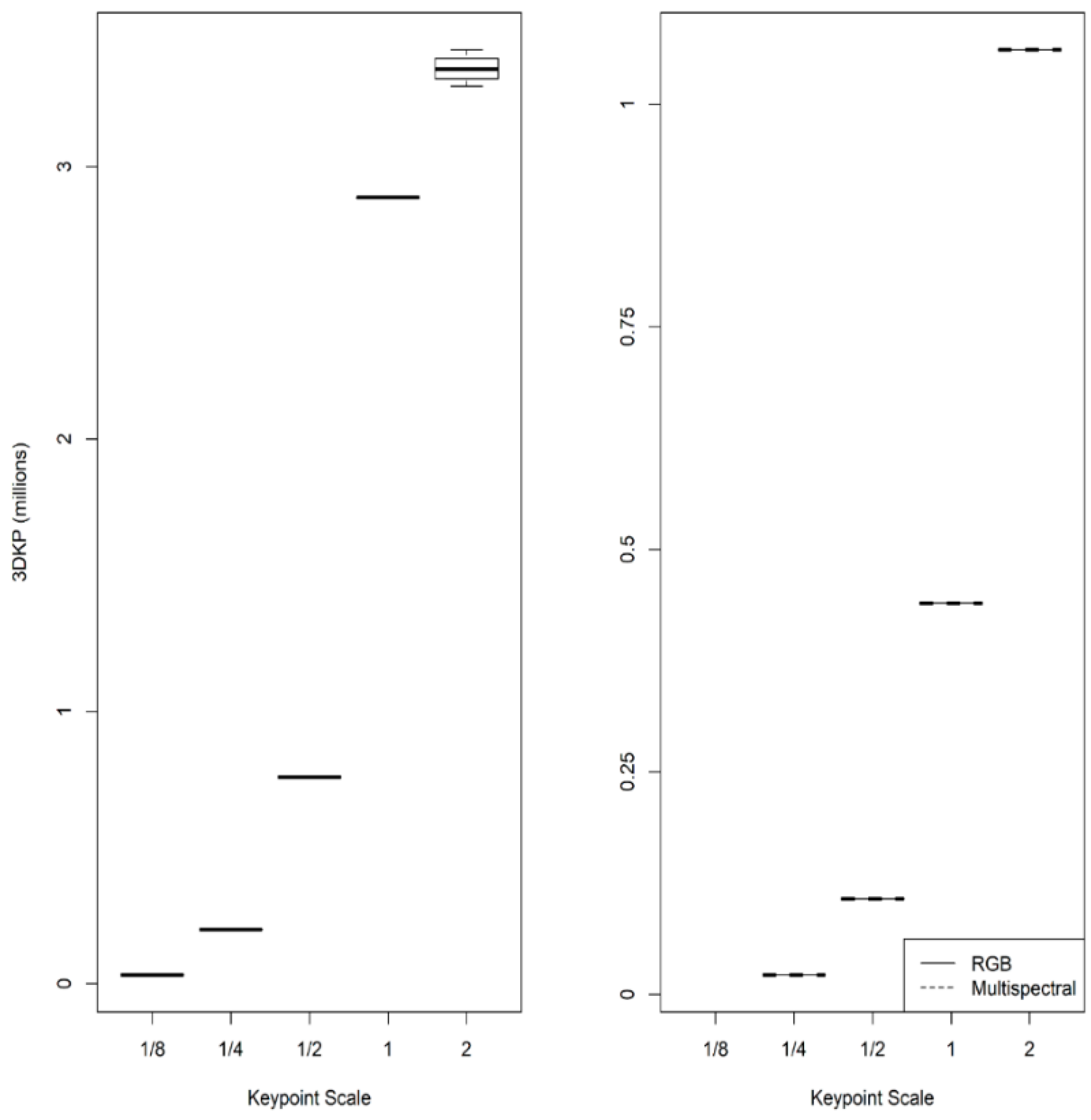
Figure 5). Likewise, this is true for 2DKP, where we observe the greatest number at two (2) keypoint scale despite lower overall calibration. RGB trials resulted in more 2DKP (in millions) by roughly three orders of magnitude, observed at all
keypoint image scales relative to multispectral processing trials (
Figure 6). The higher number of matches and 2DKP at two (2) keypoint scale would not compensate for the lost aerial coverage of the final orthomosaic and DSM if critical areas were not included in the calibration. The best results in this context occurred at one (1) keypoint scale, which is the Pix4D default processing value for keypoint scale. However, if initial imagery collection extends slightly outside the area of interest, the longer computation time and decrease in calibration may be a worthwhile tradeoff to maximize extraction of median matches and 2DKP (and thus, also 3DDP, given its previously discussed dependence on 2DKP) in the remaining imagery.
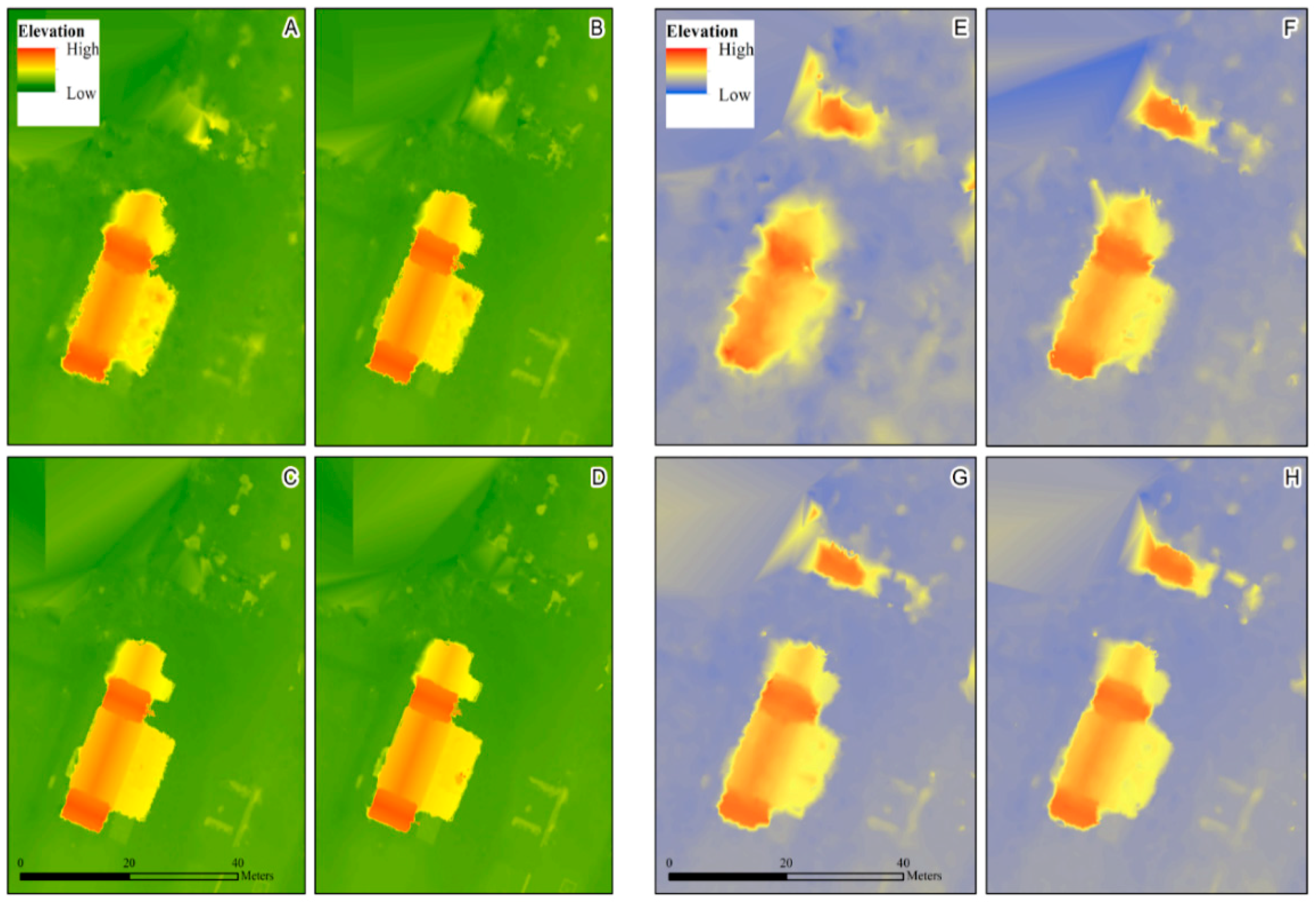
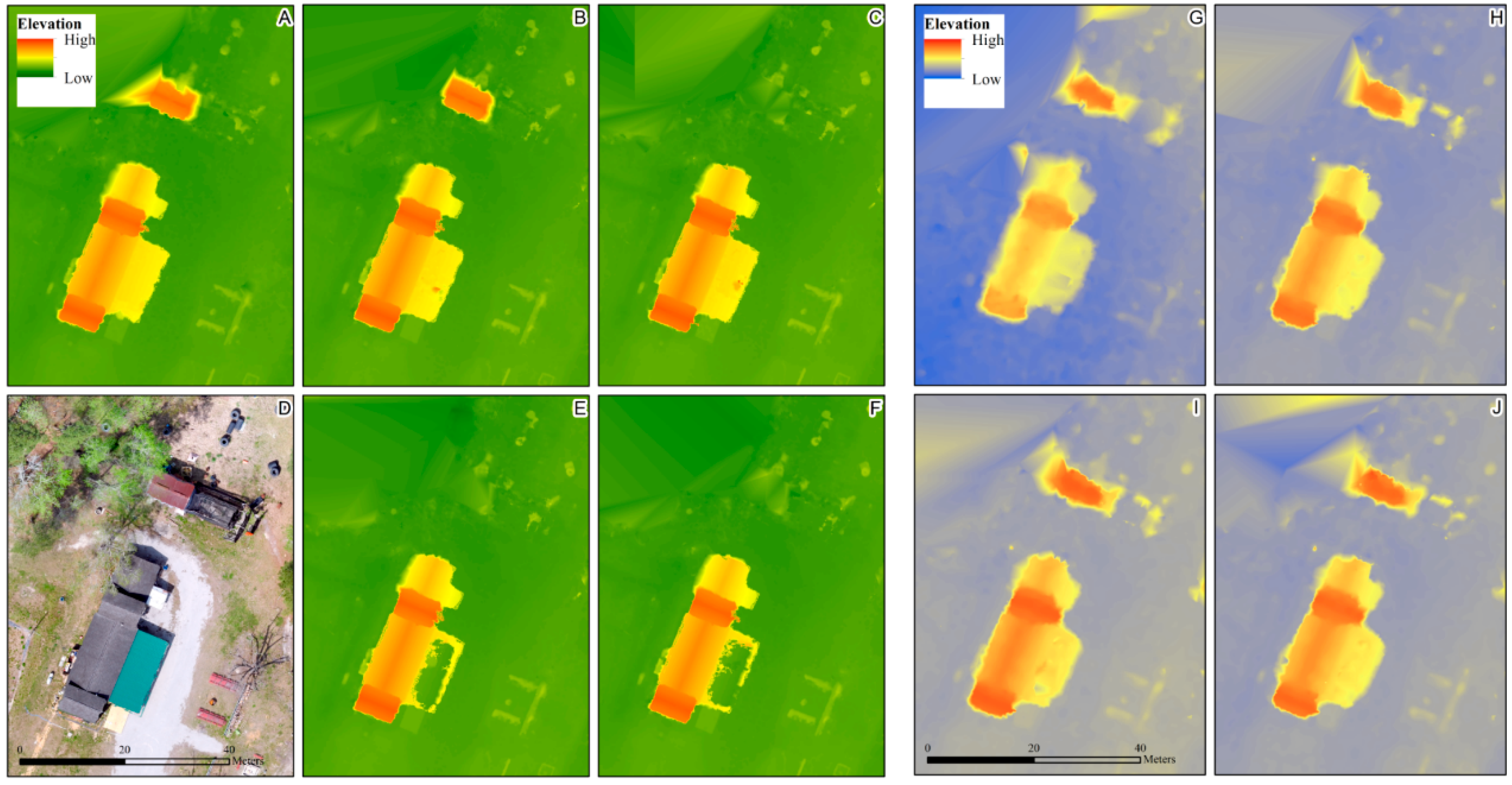
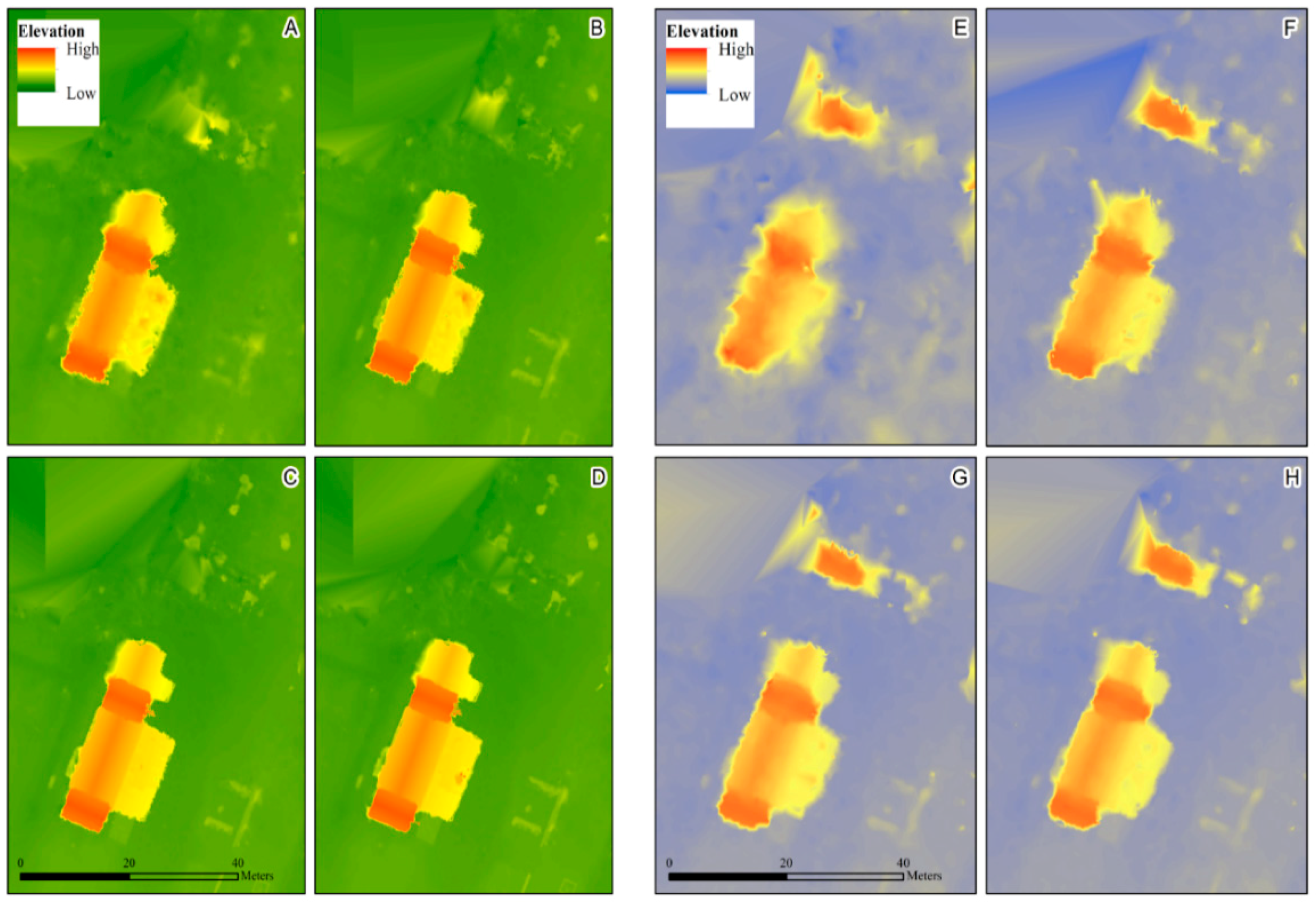
In terms of how
keypoint image scale choice translates into spatially defined products such as DSMs, we examined variation in the DSMs when
keypoint image scale was varied and image scale for point cloud densification was held constant at full (1). We present important differences between RGB and multispectral trials, as well as within RGB and multispectral trials (
Figure 7A–J). Specifically, a building with a red roof (
Figure 7D) was visible at 1/8 and 1/4 keypoint scale for RGB but not visible at higher keypoint scales (
Figure 7;
Figure 2 Area A). This same red building was able to be interpreted at all keypoint scales in multispectral processing trials despite the lower ground sampling distance and pixel size of the imagery. At higher keypoints scales in RGB, Pix4D was less likely to interpret the height of the blue overhang (
Figure 7D) correctly. At 1/2 and higher keypoint scales, the Pix4D algorithm’s calculations would also include values from the area below the overhang, leading to the production of a DSM that blends the ground and canopy due to an insufficient number of values being detected for each area individually. Interestingly, a building with a dark roof adjacent to the red building (
Figure 7D) does not show up in any of the RGB DSMs and is barely noticeable in the multispectral DSMs. In summary, multispectral data appears to perform better than RGB strictly in terms of detecting buildings or objects with well-defined edges and boundaries that are elevated above ground (
Figure 7). This is an interesting finding given the exponentially higher frequency with which RGB imagery is used to produce DSMs compared to multispectral imagery and points to an under-studied area within the broader umbrella of the UAS sciences.
In the next phase of intermediary product generation, the bundle block adjustment (BBA) process, RGB imagery results in more 3D points for the BBA (3DKP) than multispectral imagery in 1/4 through to full (1) keypoint scales. The differences are, on average, three orders of magnitude higher for RGB imagery (
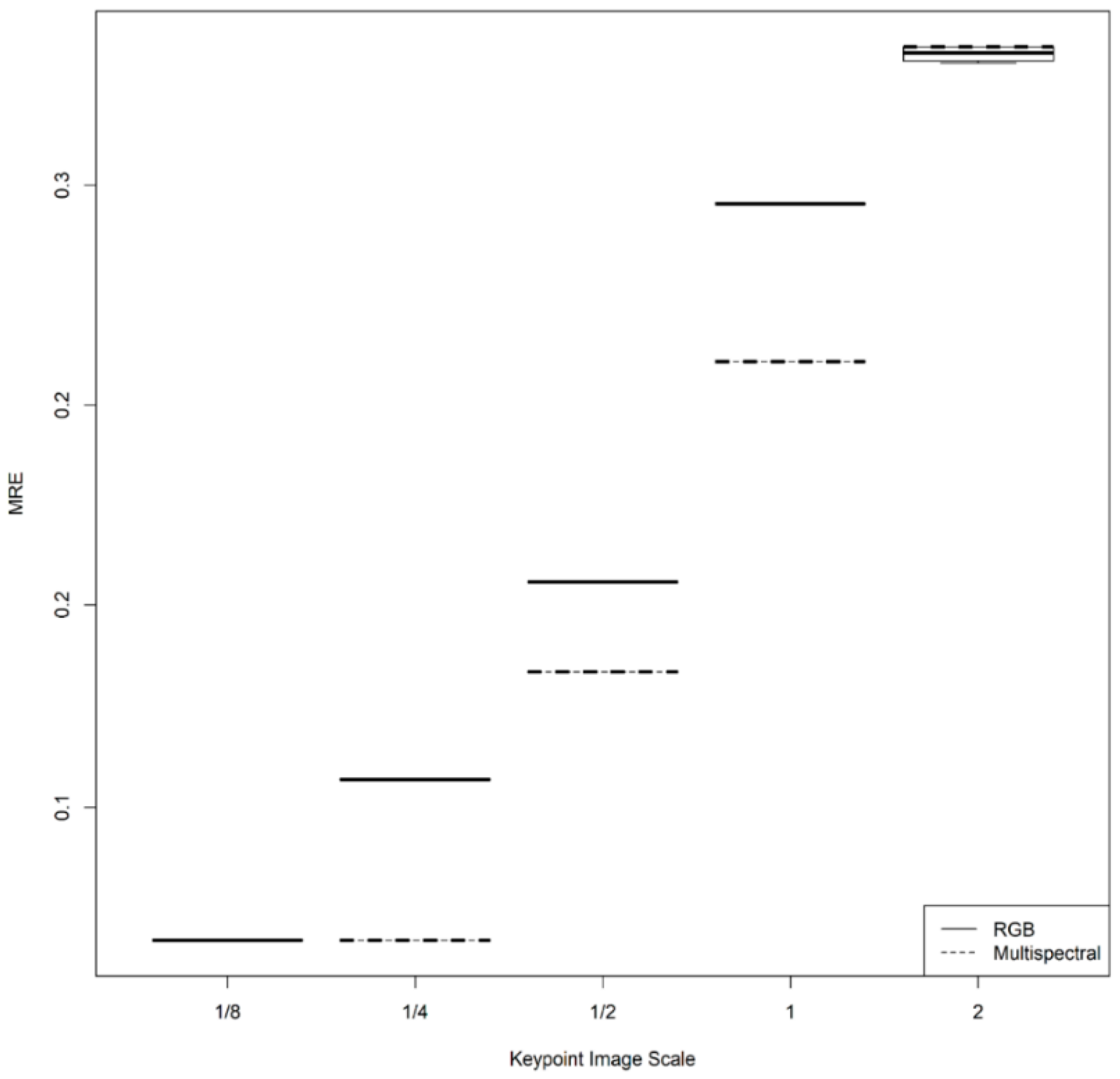
Figure 8). The difference between processing at full (1) vs. two times (2) the keypoint scale results in significantly higher 3D points for multispectral than RGB imagery, with RGB presenting some variability in the trials at two times (2) the keypoint scale. Finally, one of the last intermediary products we examined, the mean reprojection error (MRE), reveals that RGB has higher MRE than multispectral imagery (except for 1/8, where multispectral processing failed) and that MREs are nearly identical for two times (2) the keypoint scale, on the order of 0.3–0.4 (
Figure 9).
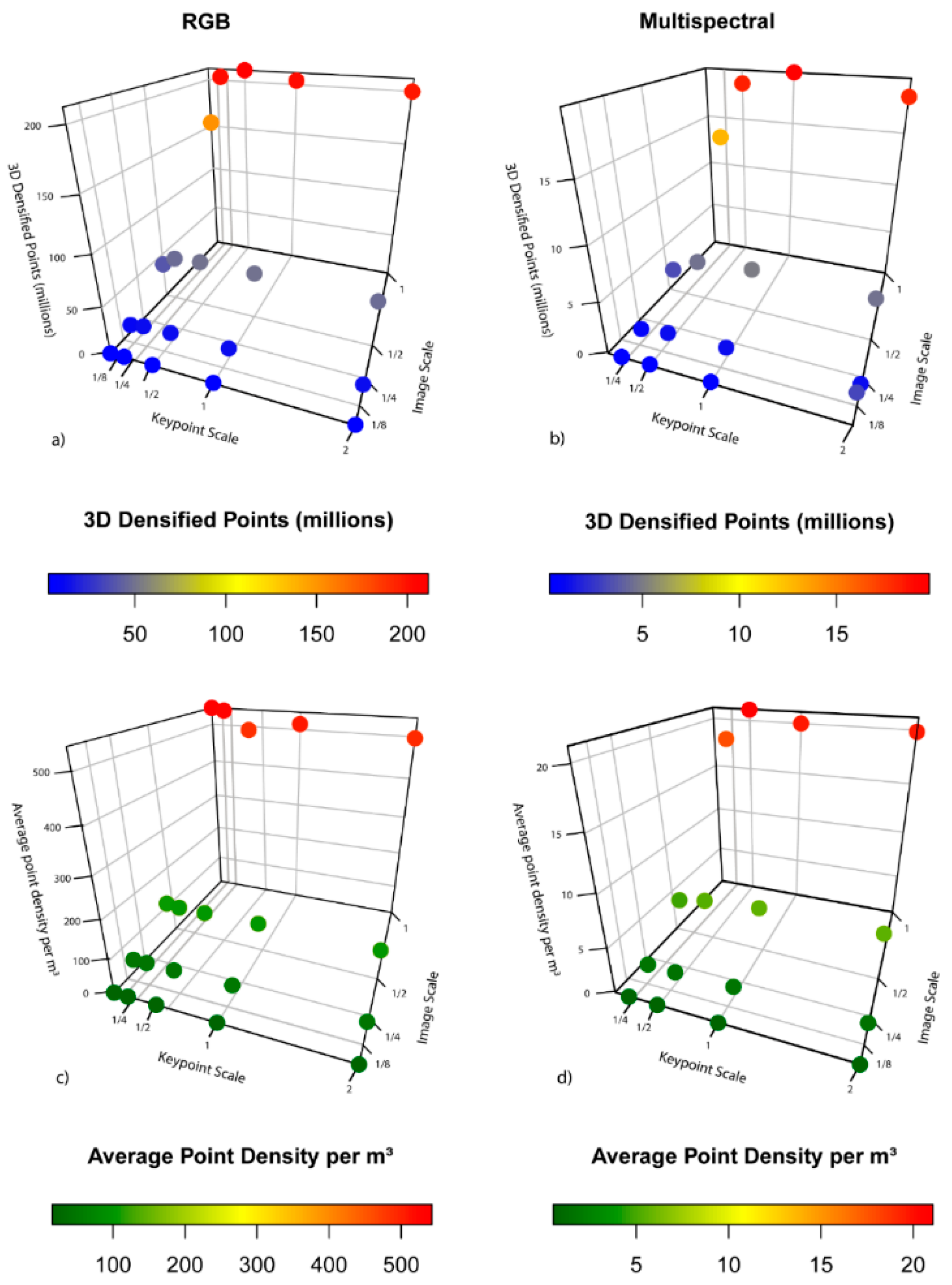
When moving towards the point cloud densification stages of processing (refer back to
Figure 1), we analyzed the effects on the number of 3D densified points (3DDP) generated as keypoint scale and image scale were varied. For imagery collected with an RGB camera, we observed increasing 3DDP with increasing image scale and more variation in 3DDP as the keypoint scale is increased (
Figure 10a). For multispectral trials, variation in the number of 3DDP again increased with increasing keypoint scale and generally, more points were produced as the image scale increased. For multispectral trials, 3DDP was highest at full (1) keypoint scale and full (1) image scale, compared to 1/2 keypoint scale and full image scale for RGB (
Figure 10a,b). The average point density for RGB increased with increasing image scale and exhibited slight variation in the number of dense points at full (1) image scale (
Figure 10c). The average point density for multispectral also increased with increasing image scale and had more variation between different keypoint scales as the image scale increased (
Figure 10d). The highest average point densities for RGB imagery occurred between 1/8 to 1/4 keypoint scales and full image scale, whereas for multispectral imagery, the highest average point density occurred at 1/2 keypoint scale (
Figure 10c,d). The imagery processed at full (1) image scale produced 3DDP and point density results that were significantly different from 3DDP and point density results when imagery was processed at lower image scales in both RGB and multispectral imagery (
Table 6). Based on these results, we conclude that RGB data is capable of producing better 3D products at lower processing parameter values, whereas multispectral requires higher (thus more computationally intensive) processing parameter values to obtain similar point cloud densities.
To visualize the results of these processing trials for 3D object reconstruction, we examine objects reconstructed from imagery in Area A (
Figure 2) again, but this time, consider how varying image scale for point cloud densification affects DSM generation (
Figure 11). The red roof and black roof buildings are not visible for RGB because this is shown as a constant 1/2 keypoint scale where they were not interpolated accurately (
Figure 7). We observe that as image scale for point cloud densification increases, the building edges become more distinct, sharper, and less blurry. Small features, such as the rows of tires in the lower right corner (refer to orthomosaic in
Figure 7D), become more distinct. Multispectral imagery was able to interpret the presence of the building not detected by RGB, though overall, the object definition quality is not as good for multispectral compared to RGB if we are comparing results generated using the same settings. For example, reconstruction 11A and 11E use the same settings and though more structures were detected in 11E (multispectral) than 11A (RGB), the DSM quality is much poorer (
Figure 11). However, it is possible to obtain good-quality DSMs from multispectral imagery if higher image scale settings are used in processing. For example, reconstruction 11A and 11H were processed using different image scales (1/8 and full, respectively) but resulted in similar-quality DSMs in terms of building sharpness, with the obvious advantage of multispectral being that it was accurately able to resolve buildings that RGB did not. These findings have important implications for users whose primary objective is using multispectral data for vegetation analyses, for instance, because it means they can process the imagery at higher settings and obtain reliable and comparable 3D surfaces as they would otherwise using the higher resolution RGB cameras that are typically thought to offer an advantage for 3D scene reconstructions.
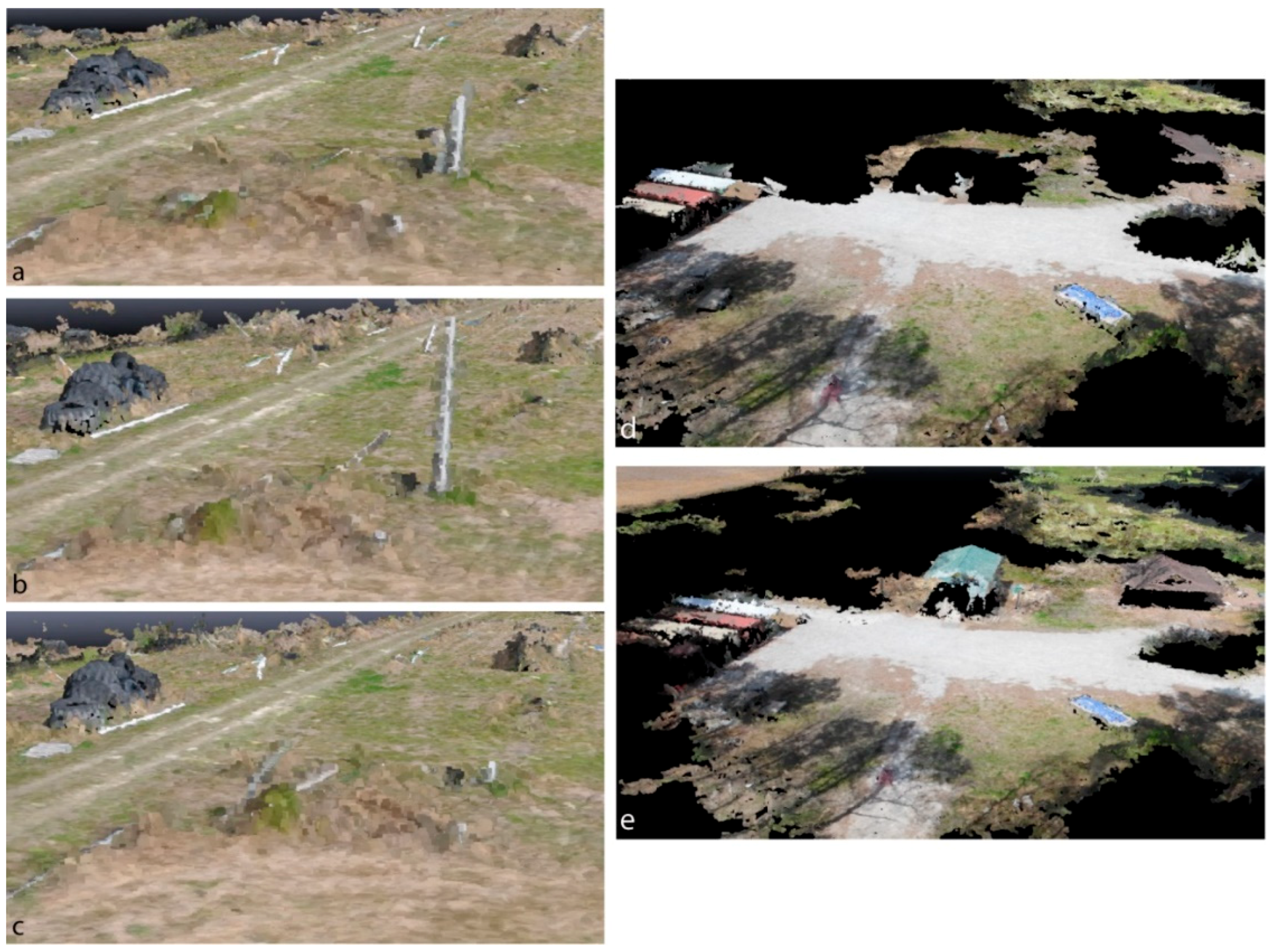
Using constant, full (1) image scale for point cloud densification and varying the keypoint scale (see
Figure 12), we created visual (RGB) representations of features in the densified point cloud that stand out in an image, in this case, a more linear feature (tall Pine tree trunk,
Figure 12a–c) and a polygonal feature (a shed on the property we surveyed,
Figure 12d,e). For the two types of objects of interest, linear and polygonal, the best rendering in 3D space appears inconsistent between the two, with linear features detected more accurately at 1/2 keypoint scale and at two (2) keypoint scale for areal features (
Figure 12d,e).
Previous UAS work over a forested plot at different flight heights, using the same RGB (SenseFly S.O.D.A. sensor) and multispectral (the Parrot Sequoia sensor) cameras we used in this study, compared image processing in both Pix4D and AgiSoft Photoscan [
7]. However, they only used 1/2 for keypoint scale and 1/4 for image scale for point cloud densification in Pix4D to reduce scene complexity while extracting visual information and to further simplify raw image geometry while computing 3D coordinates [
7]. They noted that those two parameter selections would lead to faster processing in complex landscapes but could influence accuracy, yet the degree and magnitude of changes in accuracies were not investigated as we did in this study [
7]. Gross and Heumann [
5] used full (1) keypoint scale and 1/4 for image scale for point cloud densification, noting, however, that most similar previous studies [
8,
9] only assessed geometric accuracy of different software processing systems and were generally concerned with assessing final product quality, with little quantitative attention paid to intermediary products as we did in this work. Finally, work by Sona et al. [
8] compared outputs from multiple imagery processing software packages but did not state explicitly what parameter values were used or why these were chosen, noting, however, that when comparing Pix4D and AgiSoft, for instance, that Pix4D identified fewer matched points overall but was able to detect more visible points in more images. Even though we did not compare multiple processing software packages, our work provides a set of guidelines for choosing the appropriate and case-specific initial and intermediary processing parameters for RGB and multispectral imagery to ensure the most appropriate final products are generated.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}