
Quantized Nonfragile State Estimation of Memristor-Based Fractional-Order Neural Networks with Hybrid Time Delays Subject to Sensor Saturations

Abstract
1. Introduction
2. Problem Formulation and Preliminaries
| Algorithm 1: The Switching of Memristance Parameters |
Input: The constant value n, the initial value . Output: Obtain . while
do |
3. Main Results
| Algorithm 2: Gain Matrix |
| Step I: Supply the matrix parameters with appropriate dimensions for the system
model (7) and (11). Step II: Choose scalars Step III: By using the Matlab LMI Toolbox, seek a feasible solution of the LMI (32) based on the given scalars and matrices. If the feasible solution is not obtained, return to Step I and II and reset the relevant parameters and matrices. Step IV: Combining the feasible solution for the LMI (32) and the setting , obtain the estimator gain |
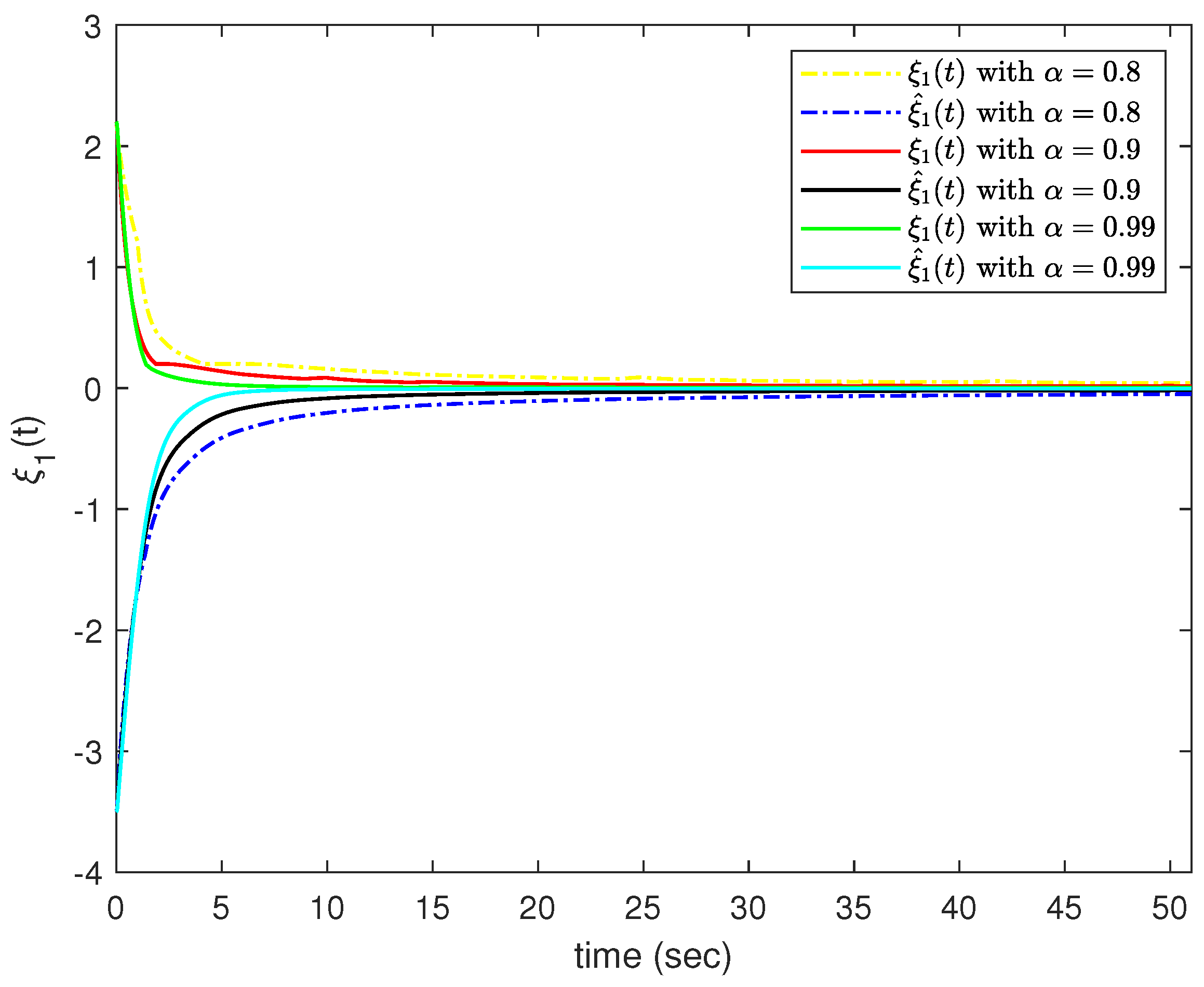
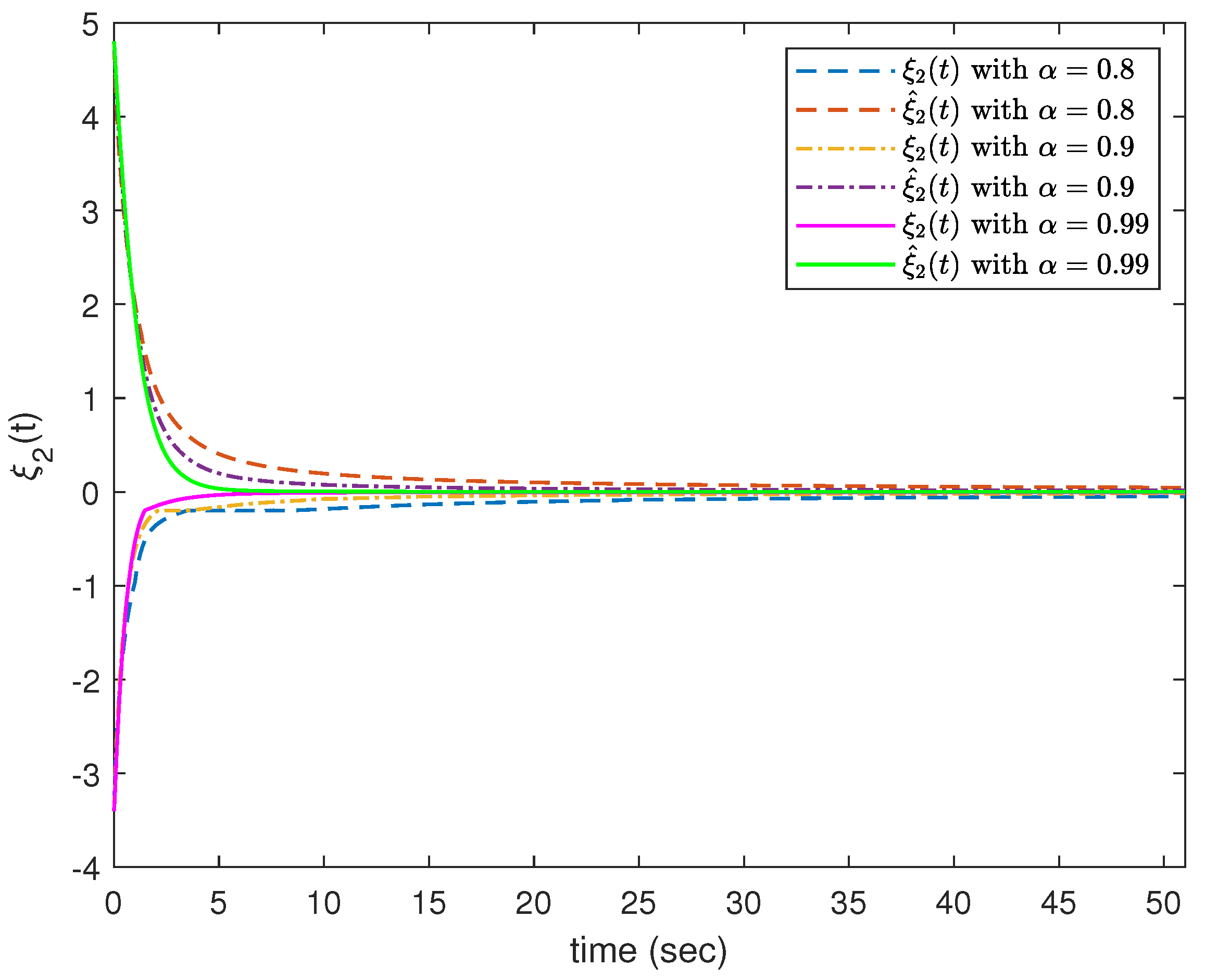
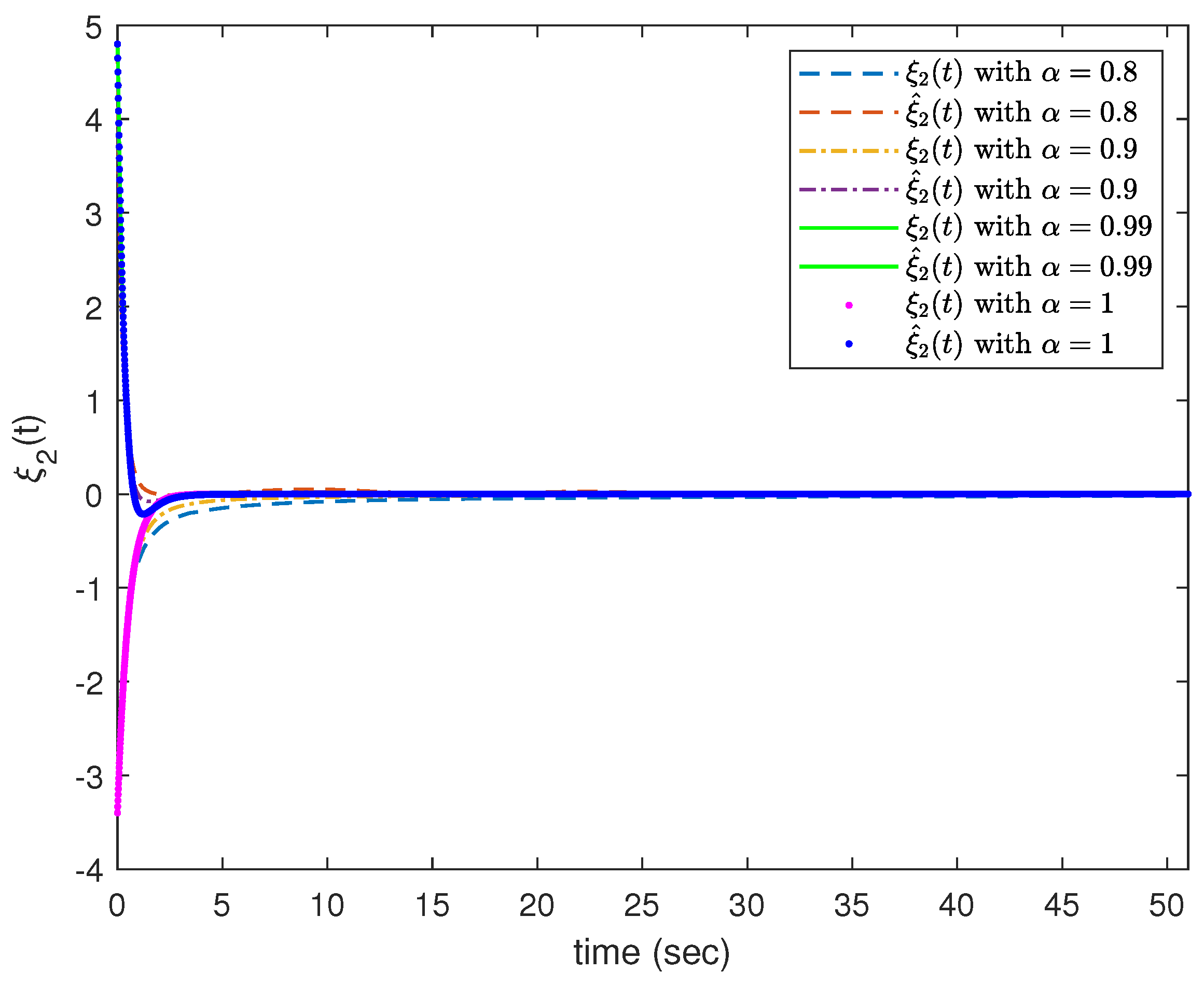
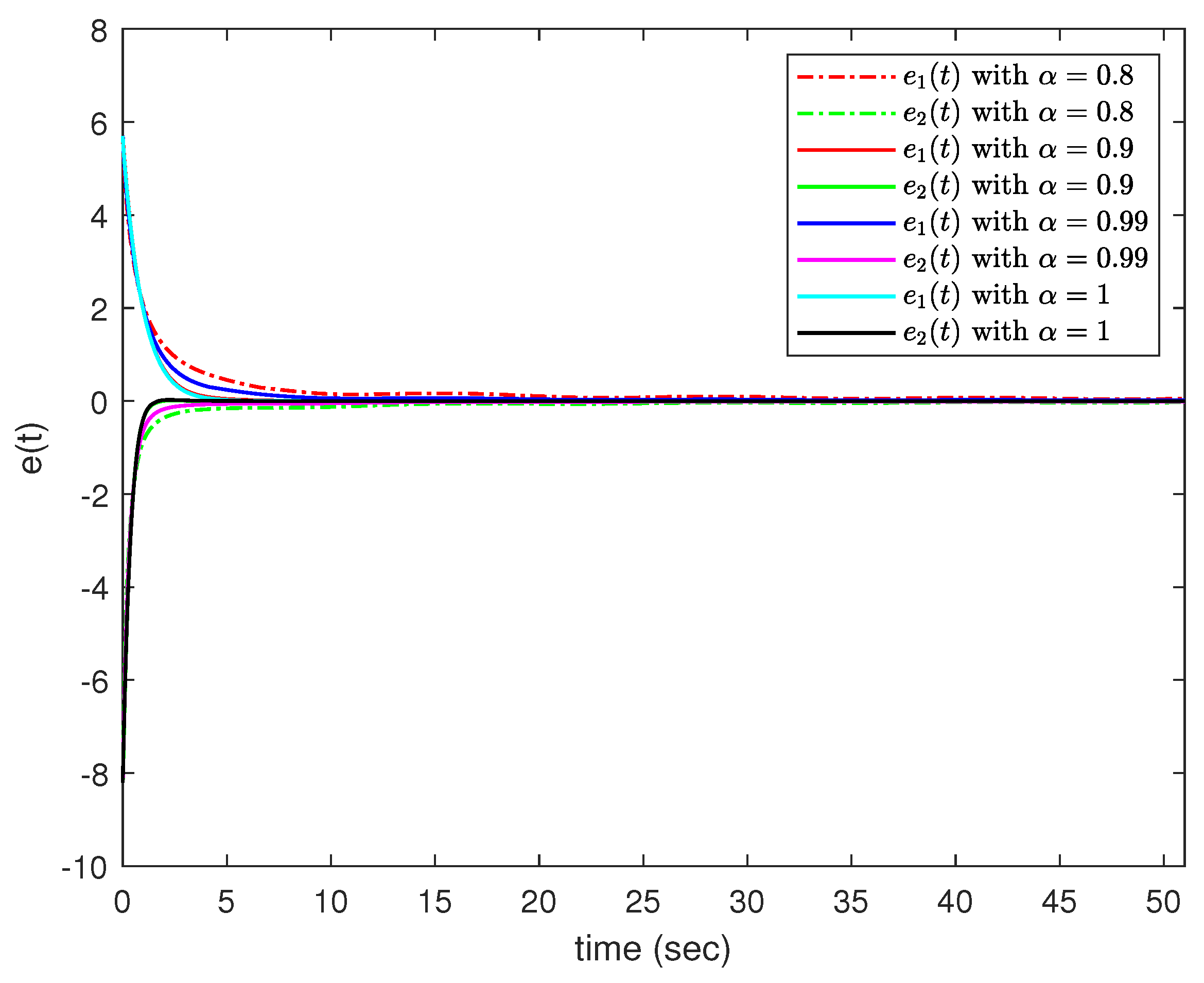
4. Examples and Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Notation
| the transpose of matrix X | |
| the identity/zero matrix with appropriate order | |
| n-dimensional Euclidean space | |
| the Euclidean norm in | |
| mathematical expectation operator | |
| * | the symmetric term |
| z |
References
- Oldham, K.; Spanier, J. The Fractional Calculus Theory and Applications of Differentiation and Integration to Arbitrary Order; Elsevier: Amsterdam, The Netherlands, 1974. [Google Scholar]
- Alarifi, N.M.; Ibrahim, R.W. Specific Classes of Analytic Functions Communicated with a Q-Differential Operator Including a Generalized Hypergeometic Function. Fractal Fract. 2022, 6, 545. [Google Scholar] [CrossRef]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- El-Nabulsi, R.A.; Torres, D.F. Fractional actionlike variational problems. J. Math. Phys. 2008, 49, 053521. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional-order systems and PI/sup/spl lambda//D/sup/spl mu//-controllers. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: Hoboken, NJ, USA, 1993. [Google Scholar]
- Cheng, Y.; Xu, W.; Jia, H.; Zhong, S. Stability analysis of fractional-order neural networks with time-varying delay utilizing free-matrix-based integral inequalities. J. Frankl. Inst. 2023, 360, 10815–10835. [Google Scholar] [CrossRef]
- Li, H.l.; Jiang, H.; Cao, J. Global synchronization of fractional-order quaternion-valued neural networks with leakage and discrete delays. Neurocomputing 2019, 385, 211–219. [Google Scholar] [CrossRef]
- Parvizian, M.; Khandani, K.; Majd, V.J. An H∞ non-fragile observer-based adaptive sliding mode controller design for uncertain fractional-order nonlinear systems with time delay and input nonlinearity. Asian J. Control 2021, 23, 423–431. [Google Scholar] [CrossRef]
- Chen, L.; Li, T.; Wu, R.; Chen, Y.; Liu, Z. Non-fragile control for a class of fractional-order uncertain linear systems with time-delay. IET Control Theory Appl. 2020, 14, 1575–1589. [Google Scholar] [CrossRef]
- Qiu, H.; Shen, J.; Cao, J.; Liu, H. L∞-Gain of Fractional-Order Positive Systems with Mixed Time-Varying Delays. IEEE Trans. Circuits Syst. Regul. Pap. 2024, 71, 828–837. [Google Scholar] [CrossRef]
- Nassajian, G.; Balochian, S. Multi-model estimation using neural network and fault detection in unknown time continuous fractional order nonlinear systems. Trans. Inst. Meas. Control 2021, 43, 497–509. [Google Scholar] [CrossRef]
- Tong, P.; Xu, H.; Sun, Y.; Wang, Y.; Peng, J.; Liao, C.; Wang, W.; Li, Q. Lightweight and highly robust memristor-based hybrid neural networks for electroencephalogram signal processing. Chin. Phys. B 2023, 32, 078505. [Google Scholar] [CrossRef]
- Zhang, X.; Jiang, D.; Nkapkop, J.D.D.; Njitacke, Z.T.; Ahmad, M.; Zhu, L.; Tsafack, N. A memristive autapse-synapse neural network: Application to image encryption. Phys. Scr. 2023, 98, 035222. [Google Scholar] [CrossRef]
- Li, J.; Dong, H.; Wang, Z.; Bu, X. Partial-Neurons-Based Passivity-Guaranteed State Estimation for Neural Networks with Randomly Occurring Time Delays. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3747–3753. [Google Scholar] [CrossRef]
- Xiao, J.; Li, Y.; Zhong, S.; Xu, F. Extended dissipative state estimation for memristive neural networks with time-varying delay. ISA Trans. 2016, 64, 113–128. [Google Scholar] [CrossRef]
- Nagamani, G.; Karnan, A.; Soundararajan, G. Delay-Dependent and Independent State Estimation for BAM Cellular Neural Networks with Multi-Proportional Delays. Circuits Syst. Signal Process. 2021, 40, 3179–3203. [Google Scholar] [CrossRef]
- Tan, Y.; Xiong, M.; Zhang, B.; Fei, S. Adaptive Event-Triggered Nonfragile State Estimation for Fractional-Order Complex Networked Systems with Cyber Attacks. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 2121–2133. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Z.; Sheng, W.; Alsaadi, F.E.; Alsaadi, F.E. Dynamic event-triggered mechanism for H∞ non-fragile state estimation of complex networks under randomly occurring sensor saturations. Inf. Sci. 2020, 509, 304–316. [Google Scholar] [CrossRef]
- Chua, L. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Guo, T.; Sun, B.; Ranjan, S.; Jiao, Y.; Wei, L.; Zhou, Y.N.; Wu, Y.A. From Memristive Materials to Neural Networks. ACS Appl. Mater. Interfaces 2020, 12, 54243–54265. [Google Scholar] [CrossRef]
- Tsafack, N.; Iliyasu, A.M.; De Dieu, N.J.; Zeric, N.T.; Kengne, J.; Abd-El-Atty, B.; Belazi, A.; Abd EL-Latif, A.A. A memristive RLC oscillator dynamics applied to image encryption. J. Inf. Secur. Appl. 2021, 61, 102944. [Google Scholar] [CrossRef]
- Duan, S.; Hu, X.; Dong, Z.; Wang, L.; Mazumder, P. Memristor-Based Cellular Nonlinear/Neural Network: Design, Analysis, and Applications. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1202–1213. [Google Scholar] [CrossRef]
- Popa, C.A. Mittag-Leffler stability and synchronization of neutral-type fractional-order neural networks with leakage delay and mixed delays. J. Frankl. Inst. 2023, 360, 327–355. [Google Scholar] [CrossRef]
- Jia, J.; Wang, F.; Zeng, Z. Global stabilization of fractional-order memristor-based neural networks with incommensurate orders and multiple time-varying delays: A positive-system-based approach. Nonlinear Dyn. 2021, 104, 2303–2329. [Google Scholar] [CrossRef]
- Hong, D.T.; Sau, N.H.; Thuan, M.V. New Criteria for Dissipativity Analysis of Fractional-Order Static Neural Networks. Circuits Syst. Signal Process. 2022, 41, 2221–2243. [Google Scholar] [CrossRef]
- Bao, H.; Cao, J.; Kurths, J. State estimation of fractional-order delayed memristive neural networks. Nonlinear Dyn. 2018, 94, 1215–1225. [Google Scholar] [CrossRef]
- Nagamani, G.; Shafiya, M.; Soundararajan, G. An LMI based state estimation for fractional-order memristive neural networks with leakage and time delays. Neural Process. Lett. 2020, 52, 2089–2108. [Google Scholar] [CrossRef]
- Li, R.; Gao, X.; Cao, J. Quasi-state estimation and quasi-synchronization control of quaternion-valued fractional-order fuzzy memristive neural networks: Vector ordering approach. Appl. Math. Comput. 2019, 362, 124572. [Google Scholar] [CrossRef]
- Dorato, P. Non-fragile controller design: An overview. In Proceedings of the 1998 American Control Conference, ACC 1998, Philadelphia, PA, USA, 24–26 June 1998; Volume 5, pp. 2829–2831. [Google Scholar]
- Zha, L.; Fang, J.-A.; Liu, J.; Tian, E. Event-triggered non-fragile state estimation for delayed neural networks with randomly occurring sensor nonlinearity. Neurocomputing 2018, 273, 1–8. [Google Scholar] [CrossRef]
- Shao, X.; Lyu, M.; Zhang, J. Nonfragile estimator design for fractional-order neural networks under event-triggered mechanism. Discret. Dyn. Nat. Soc. 2021, 2021, 6695353. [Google Scholar] [CrossRef]
- Bao, H.; Park, J.H.; Cao, J. Non-fragile state estimation for fractional-order delayed memristive BAM neural networks. Neural Netw. 2019, 119, 190–199. [Google Scholar] [CrossRef]
- Liu, J.; Xia, J.; Cao, J.; Tian, E. Quantized state estimation for neural networks with cyber attacks and hybrid triggered communication scheme. Neurocomputing 2018, 291, 35–49. [Google Scholar] [CrossRef]
- Zhang, H.; Ye, R.; Liu, S.; Cao, J.; Alsaedi, A.; Li, X. LMI-based approach to stability analysis for fractional-order neural networks with discrete and distributed delays. Int. J. Syst. Sci. 2018, 49, 537–545. [Google Scholar] [CrossRef]
- Shao, X.G.; Zhang, J.; Lu, Y.J. Event-based nonfragile state estimation for memristive recurrent neural networks with stochastic cyber-attacks and sensor saturations. Chin. Phys. B 2024. [Google Scholar] [CrossRef]
- Chen, S.; Song, Q.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Global asymptotic stability of fractional-order complex-valued neural networks with probabilistic time-varying delays. Neurocomputing 2021, 450, 311–318. [Google Scholar] [CrossRef]
- Ali, M.S.; Hymavathi, M.; Saroha, S.; Moorthy, R.K. Global asymptotic stability of neutral type fractional-order memristor-based neural networks with leakage term, discrete and distributed delays. Math. Methods Appl. Sci. 2021, 44, 5953–5973. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Aubin, J.P.; Frankowska, H. Set-Valued Analysis; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Zhang, R.; Zeng, D.; Zhong, S.; Yu, Y. Event-triggered sampling control for stability and stabilization of memristive neural networks with communication delays. Appl. Math. Comput. 2017, 310, 57–74. [Google Scholar] [CrossRef]
- Cheng, J.; Liang, L.; Park, J.H.; Yan, H.; Li, K. A Dynamic Event-Triggered Approach to State Estimation for Switched Memristive Neural Networks with Nonhomogeneous Sojourn Probabilities. IEEE Trans. Circuits Syst. Regul. Pap. 2021, 68, 4924–4934. [Google Scholar] [CrossRef]
- Guo, M.; Zhu, S.; Liu, X. Observer-based state estimation for memristive neural networks with time-varying delay. Knowl.-Based Syst. 2022, 246, 108707. [Google Scholar]
- Wang, Z.; Ding, S.; Huang, Z.; Zhang, H. Exponential Stability and Stabilization of Delayed Memristive Neural Networks Based on Quadratic Convex Combination Method. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 2337–2350. [Google Scholar] [CrossRef]
- Geng, H.; Wang, Z.; Hu, J.; Alsaadi, F.E.; Cheng, Y. Outlier-resistant sequential filtering fusion for cyber-physical systems with quantized measurements under denial-of-service attacks. Inf. Sci. 2023, 628, 488–503. [Google Scholar] [CrossRef]
- Fu, M.; Xie, L. The sector bound approach to quantized feedback control. IEEE Trans. Autom. Control 2005, 50, 1698–1711. [Google Scholar]
- Cao, Y.Y.; Lin, Z.; Chen, B.M. An output feedback/spl Hscr//sub/spl infin//controller design for linear systems subject to sensor nonlinearities. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2003, 50, 914–921. [Google Scholar]
- Zhang, S.; Yu, Y.; Yu, J. LMI conditions for global stability of fractional-order neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2423–2433. [Google Scholar] [CrossRef]
- Yang, X.; Wu, X.; Song, Q. Caputo–Wirtinger integral inequality and its application to stability analysis of fractional-order systems with mixed time-varying delays. Appl. Math. Comput. 2024, 460, 128303. [Google Scholar] [CrossRef]
- Gu, K.; Chen, J.; Kharitonov, V.L. Stability of Time-Delay Systems; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Jiang, Z.; Huang, F.; Shao, H.; Cai, S.; Lu, X.; Jiang, S. Time-varying finite-time synchronization analysis of attack-induced uncertain neural networks. Chaos Solitons Fractals 2023, 175, 113954. [Google Scholar] [CrossRef]
- Xu, B.; Li, B. Dynamic Event-Triggered Consensus for Fractional-Order Multi-Agent Systems without Intergroup Balance Condition. Fractal Fract. 2023, 7, 268. [Google Scholar] [CrossRef]
- Hymavathi, M.; Muhiuddin, G.; Syed Ali, M.; Al-Amri, J.F.; Gunasekaran, N.; Vadivel, R. Global Exponential Stability of Fractional Order Complex-Valued Neural Networks with Leakage Delay and Mixed Time Varying Delays. Fractal Fract. 2022, 6, 140. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, X.; Lu, Y.; Zhang, J.; Lyu, M.; Yang, Y. Quantized Nonfragile State Estimation of Memristor-Based Fractional-Order Neural Networks with Hybrid Time Delays Subject to Sensor Saturations. Fractal Fract. 2024, 8, 343. https://doi.org/10.3390/fractalfract8060343
Shao X, Lu Y, Zhang J, Lyu M, Yang Y. Quantized Nonfragile State Estimation of Memristor-Based Fractional-Order Neural Networks with Hybrid Time Delays Subject to Sensor Saturations. Fractal and Fractional. 2024; 8(6):343. https://doi.org/10.3390/fractalfract8060343
Chicago/Turabian StyleShao, Xiaoguang, Yanjuan Lu, Jie Zhang, Ming Lyu, and Yu Yang. 2024. "Quantized Nonfragile State Estimation of Memristor-Based Fractional-Order Neural Networks with Hybrid Time Delays Subject to Sensor Saturations" Fractal and Fractional 8, no. 6: 343. https://doi.org/10.3390/fractalfract8060343
APA StyleShao, X., Lu, Y., Zhang, J., Lyu, M., & Yang, Y. (2024). Quantized Nonfragile State Estimation of Memristor-Based Fractional-Order Neural Networks with Hybrid Time Delays Subject to Sensor Saturations. Fractal and Fractional, 8(6), 343. https://doi.org/10.3390/fractalfract8060343