
Event-Triggered Adaptive Neural Network Control for State-Constrained Pure-Feedback Fractional-Order Nonlinear Systems with Input Delay and Saturation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Compared with fractional-order controller results [31,32,33], the full-state constraints, input delay, and unknown actuator saturation are investigated simultaneously in this article, and the BLFs and neural network are introduced into the design process of the backstepping technique, which can ensure that state convergence without contravening state constraints can be guaranteed, and the boundedness of all the closed-loop system signals can be accomplished.
- (2)
- Compared with controller designed for FONSs subject to input delay in [27,28,29,30,34], the event-triggered mechanism is designed to reduce the communications constraints of network resources, and the fractional-order dynamic surface filter is presented to remove the explosion of differentiation from the recursive procedure, which effectively makes the proposed controller more suitable for practical engineering.
2. Preliminaries
3. System Descriptions and Problem Formulation
4. Control Scheme Design and Stability Analysis
4.1. Control Design
4.2. Stability Analysis
- (i)
- All system signals are bounded, and error signal will stay around the compact set
- (ii)
- All system states can not transgress the sets.
- (iii)
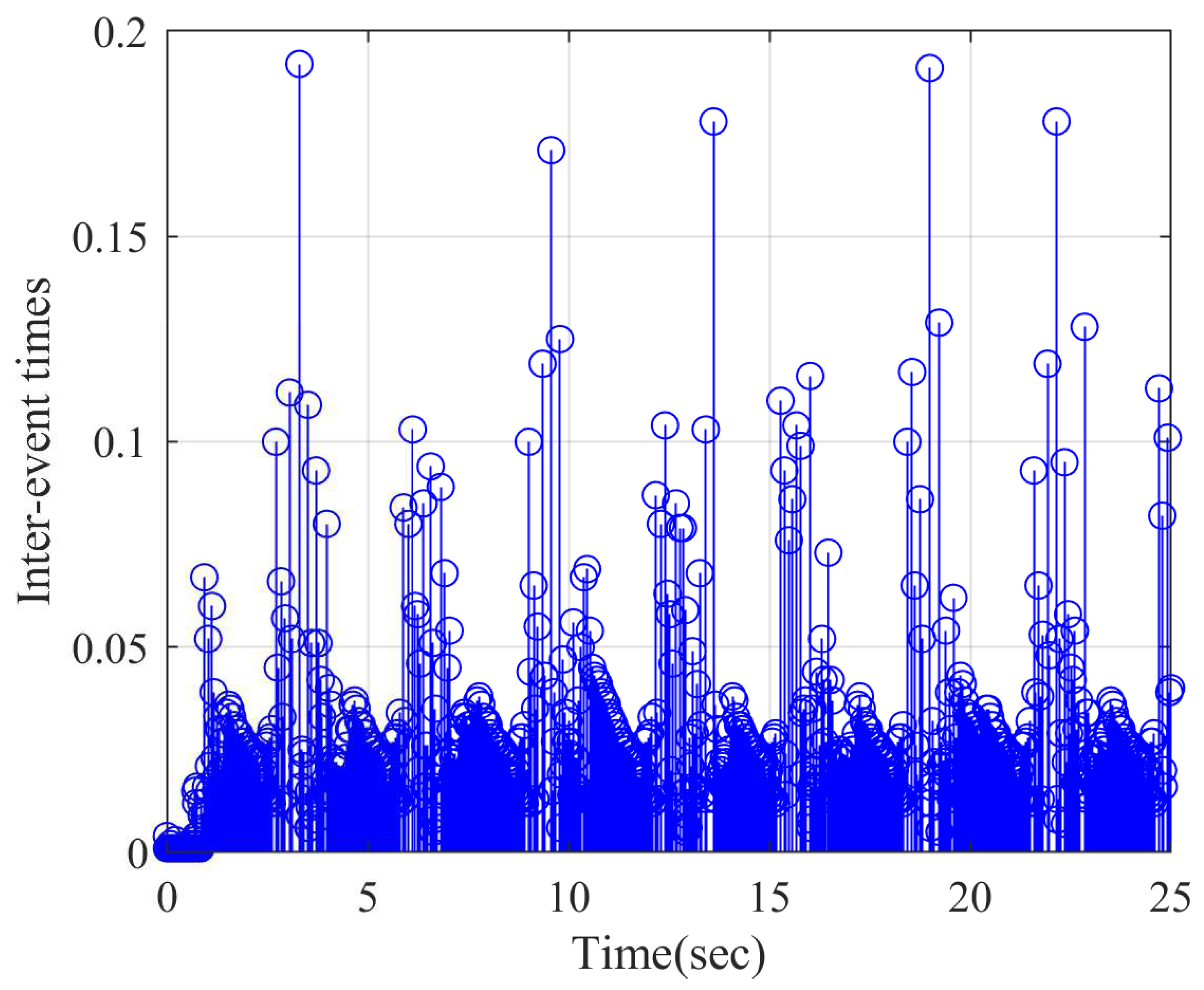
- The Zeno behavior can be avoided.
5. Simulation
5.1. Example 1
5.2. Example 2
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- (2)
- The proof of Theorem 1-(ii): Based on and from Assumption 3, one has . Define , one obtain . Due to and , yielding . Let , one can obtain . Similarly, one can in turn obtain , .
- (3)
- The proof of Theorem 1-(iii): From the sampling error , one can obtain . Due to (49), is bounded, and satisfying . According to and , one can obtain , avoiding the Zeno phenomenon.
References
- West, B.J.; Bologna, M.; Grigolini, P. Physics of Fractal Operators; Springer: Berlin/Heidelberg, Germany, 2003; Volume 10. [Google Scholar]
- Bagley, R.L.; Torvik, P.J. On the fractional calculus model of viscoelastic behavior. J. Rheol. 1986, 30, 133–155. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, Y.; Baleanu, D.; Chen, W.; Chen, Y. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 213–231. [Google Scholar] [CrossRef]
- Soleimanizadeh, A.; Nekoui, M.A. Optimal type-2 fuzzy synchronization of two different fractional-order chaotic systems with variable orders with an application to secure communication. Soft Comput. 2021, 25, 6415–6426. [Google Scholar] [CrossRef]
- Li, X.; Mou, J.; Xiong, L.; Wang, Z.; Xu, J. Fractional-order double-ring erbium-doped fiber laser chaotic system and its application on image encryption. Opt. Laser Technol. 2021, 140, 107074. [Google Scholar] [CrossRef]
- Shi, J.; He, K.; Fang, H. Chaos, Hopf bifurcation and control of a fractional-order delay financial system. Math. Comput. Simul. 2022, 194, 348–364. [Google Scholar] [CrossRef]
- Wang, Y.L.; Jahanshahi, H.; Bekiros, S.; Bezzina, F.; Chu, Y.M.; Aly, A.A. Deep recurrent neural networks with finite-time terminal sliding mode control for a chaotic fractional-order financial system with market confidence. Chaos Solitons Fractals 2021, 146, 110881. [Google Scholar] [CrossRef]
- Jin, T.; Xia, H.; Deng, W.; Li, Y.; Chen, H. Uncertain fractional-order multi-objective optimization based on reliability analysis and application to fractional-order circuit with caputo type. Circuits Syst. Signal Process. 2021, 40, 5955–5982. [Google Scholar] [CrossRef]
- Mirzajani, S.; Aghababa, M.P.; Heydari, A. Adaptive T–S fuzzy control design for fractional-order systems with parametric uncertainty and input constraint. Fuzzy Sets Syst. 2018, 365, 22–39. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Wang, H.; Sun, Y. Adaptive fuzzy control for a class of unknown fractional-order neural networks subject to input nonlinearities and dead-zones. Inf. Sci. 2018, 454–455, 30–45. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X.; Zhang, Z. Adaptive Command Filtered Neuro-Fuzzy Control Design for Fractional-Order Nonlinear Systems With Unknown Control Directions and Input Quantization. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7238–7249. [Google Scholar] [CrossRef]
- Hu, T.; He, Z.; Zhang, X.; Zhong, S. Event-triggered consensus strategy for uncertain topological fractional-order multiagent systems based on Takagi–Sugeno fuzzy models. Inf. Sci. 2021, 551, 304–323. [Google Scholar] [CrossRef]
- Fei, J.; Wang, H.; Fang, Y. Novel neural network fractional-order sliding-mode control with application to active power filter. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 3508–3518. [Google Scholar] [CrossRef]
- Cao, B.; Nie, X. Event-triggered adaptive neural networks control for fractional-order nonstrict-feedback nonlinear systems with unmodeled dynamics and input saturation. Neural Netw. 2021, 142, 288–302. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J.; Wang, H.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef] [PubMed]
- Zhan, Y.; Tong, S. Adaptive fuzzy output-feedback decentralized control for fractional-order nonlinear large-scale systems. IEEE Trans. Cybern. 2021, 52, 12795–12804. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, H.; Shi, Z.; Gao, Z. Neural-Network-Based Finite-Time Bipartite Containment Control for Fractional-Order Multi-Agent Systems. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 7418–7429. [Google Scholar] [CrossRef]
- Dhanalakshmi, P.; Senpagam, S.; Mohanapriya, R. Finite-time fuzzy reliable controller design for fractional-order tumor system under chemotherapy. Fuzzy Sets Syst. 2022, 432, 168–181. [Google Scholar] [CrossRef]
- Wang, C.; Cui, L.; Liang, M.; Li, J.; Wang, Y. Adaptive Neural Network Control for a Class of Fractional-Order Nonstrict-Feedback Nonlinear Systems With Full-State Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6677–6689. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Cao, J.; Arefi, M.M. Adaptive neural output-feedback control for nonstrict-feedback time-delay fractional-order systems with output constraints and actuator nonlinearities. Neural Netw. 2018, 105, 256–276. [Google Scholar] [CrossRef]
- Shahvali, M.; Azarbahram, A.; Naghibi-Sistani, M.B.; Askari, J. Bipartite consensus control for fractional-order nonlinear multi-agent systems: An output constraint approach. Neurocomputing 2020, 397, 212–223. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Jinde, C.; Arefi, M.M. Neural network controller design for fractional-order systems with input nonlinearities and asymmetric time-varying Pseudo-state constraints. Chaos Solitons Fractals 2021, 144, 110742. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Su, C.Y.; Fu, J.; Jin, Y.; Chai, T. Nussbaum-based finite-time fractional-order backstepping fault-tolerant flight control of fixed-wing UAV against input saturation with hardware-in-the-loop validation. Mech. Syst. Signal Process. 2021, 153, 107406. [Google Scholar] [CrossRef]
- Alipour, M.; Malekzadeh, M.; Ariaei, A. Active fractional-order sliding mode control of flexible spacecraft under actuators saturation. J. Sound Vib. 2022, 535, 117110. [Google Scholar] [CrossRef]
- Ju, X.; Wei, C.; Xu, H.; Wang, F. Fractional-order sliding mode control with a predefined-time observer for VTVL reusable launch vehicles under actuator faults and saturation constraints. ISA Trans. 2022, 129, 55–72. [Google Scholar] [CrossRef] [PubMed]
- Geng, W.T.; Lin, C.; Chen, B. Observer-based stabilizing control for fractional-order systems with input delay. ISA Trans. 2020, 100, 103–108. [Google Scholar] [CrossRef]
- Keighobadi, J.; Pahnehkolaei, S.M.A.; Alfi, A.; Machado, J. Command-filtered compound FAT learning control of fractional-order nonlinear systems with input delay and external disturbances. Nonlinear Dyn. 2022, 108, 293–313. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Robust adaptive backstepping control of uncertain fractional-order nonlinear systems with input time delay. Math. Comput. Simul. 2022, 196, 251–272. [Google Scholar] [CrossRef]
- Liu, S.; Wang, H.; Li, T. Adaptive composite dynamic surface neural control for nonlinear fractional-order systems subject to delayed input. ISA Trans. 2022, 134, 122–133. [Google Scholar] [CrossRef]
- Zou, W.; Mao, J.; Xiang, Z. Adaptive Fuzzy Finite-Time Sampled-Data Control for A Class of Fractional-Order Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2024, 1–14. [Google Scholar] [CrossRef]
- Ha, S.; Chen, L.; Liu, D.; Liu, H. Command Filtered Adaptive Fuzzy Control of Fractional-Order Nonlinear Systems with Unknown Dead Zones. IEEE Trans. Syst. Man Cybern. Syst. 2024, 1–12. [Google Scholar] [CrossRef]
- Li, D.; Dong, J. Fractional-Order Systems Optimal Control via Actor-Critic Reinforcement Learning and Its Validation for Chaotic MFET. IEEE Trans. Autom. Sci. Eng. 2024, 1–10. [Google Scholar] [CrossRef]
- Xing, Y.; Wang, Y. Finite-Time Adaptive NN Backstepping Dynamic Surface Control for Input-Delay Fractional-Order Nonlinear Systems. IEEE Access 2023, 11, 5206–5214. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: Cambridge, MA, USA, 1999; p. 2. [Google Scholar]
- Das, S. Functional Fractional Calculus for System Identification and Controls; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Aguila Camacho, N.; Duarte Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Chen, W.; Dai, H.; Song, Y.; Zhang, Z. Convex Lyapunov functions for stability analysis of fractional order systems. IET Control Theory Appl. 2017, 11, 1070–1074. [Google Scholar] [CrossRef]
- Gong, P. Distributed tracking of heterogeneous nonlinear fractional-order multi-agent systems with an unknown leader. J. Frankl.-Inst.-Eng. Appl. Math. 2017, 354, 2226–2244. [Google Scholar] [CrossRef]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive Neural Control for Output Feedback Nonlinear Systems Using a Barrier Lyapunov Function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov Functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Polycarpou, M.M. Stable adaptive neural control scheme for nonlinear systems. IEEE Trans. Autom. Control 1996, 41, 447–451. [Google Scholar] [CrossRef]
- Sanner, R.M.; Slotine, J.J. Gaussian networks for direct adaptive control. IEEE Trans. Neural Netw. 1992, 3, 837–863. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Chen, B.; Liu, X.; Liu, K.; Lin, C. Robust Adaptive Fuzzy Tracking Control for Pure-Feedback Stochastic Nonlinear Systems With Input Constraints. IEEE Trans. Cybern. 2013, 43, 2093–2104. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Shi, P.; Dong, W.; Lin, C. Command Filtering-Based Fuzzy Control for Nonlinear Systems with Saturation Input. IEEE Trans. Cybern. 2017, 47, 2472–2479. [Google Scholar] [CrossRef] [PubMed]
- Shao, S.; Chen, M.; Chen, S.; Wu, Q. Adaptive neural control for an uncertain fractional-order rotational mechanical system using disturbance observer. IET Control Theory Appl. 2016, 10, 1972–1980. [Google Scholar] [CrossRef]
- Xu, B.; Chen, D.; Zhang, H.; Wang, F. Modeling and stability analysis of a fractional-order Francis hydro-turbine governing system. Chaos Solitons Fractals 2015, 75, 50–61. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X. Fractional order fixed-time nonsingular terminal sliding mode synchronization and control of fractional order chaotic systems. Nonlinear Dyn. 2017, 89, 2065–2083. [Google Scholar] [CrossRef]
- Petras, I. A note on the fractional-order Chua’s system. Chaos Solitons Fractals 2008, 38, 140–147. [Google Scholar] [CrossRef]
- Wang, M.; Liu, X.; Shi, P. Adaptive Neural Control of Pure-Feedback Nonlinear Time-Delay Systems via Dynamic Surface Technique. IEEE Trans. Syst. Man Cybern. Part B 2011, 41, 1681–1692. [Google Scholar] [CrossRef]
- Jafari, A.A.; Mohammadi, S.M.A.; Naseriyeh, M.H. Adaptive type-2 fuzzy backstepping control of uncertain fractional-order nonlinear systems with unknown dead-zone. Appl. Math. Model. 2019, 69, 506–532. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Yang, J.; Liang, M. Event-Triggered Adaptive Neural Network Control for State-Constrained Pure-Feedback Fractional-Order Nonlinear Systems with Input Delay and Saturation. Fractal Fract. 2024, 8, 256. https://doi.org/10.3390/fractalfract8050256
Wang C, Yang J, Liang M. Event-Triggered Adaptive Neural Network Control for State-Constrained Pure-Feedback Fractional-Order Nonlinear Systems with Input Delay and Saturation. Fractal and Fractional. 2024; 8(5):256. https://doi.org/10.3390/fractalfract8050256
Chicago/Turabian StyleWang, Changhui, Jiaqi Yang, and Mei Liang. 2024. "Event-Triggered Adaptive Neural Network Control for State-Constrained Pure-Feedback Fractional-Order Nonlinear Systems with Input Delay and Saturation" Fractal and Fractional 8, no. 5: 256. https://doi.org/10.3390/fractalfract8050256
APA StyleWang, C., Yang, J., & Liang, M. (2024). Event-Triggered Adaptive Neural Network Control for State-Constrained Pure-Feedback Fractional-Order Nonlinear Systems with Input Delay and Saturation. Fractal and Fractional, 8(5), 256. https://doi.org/10.3390/fractalfract8050256