
Sampled-Data Stabilization of Fractional Linear System under Arbitrary Sampling Periods


Abstract
:1. Introduction
2. Preliminaries
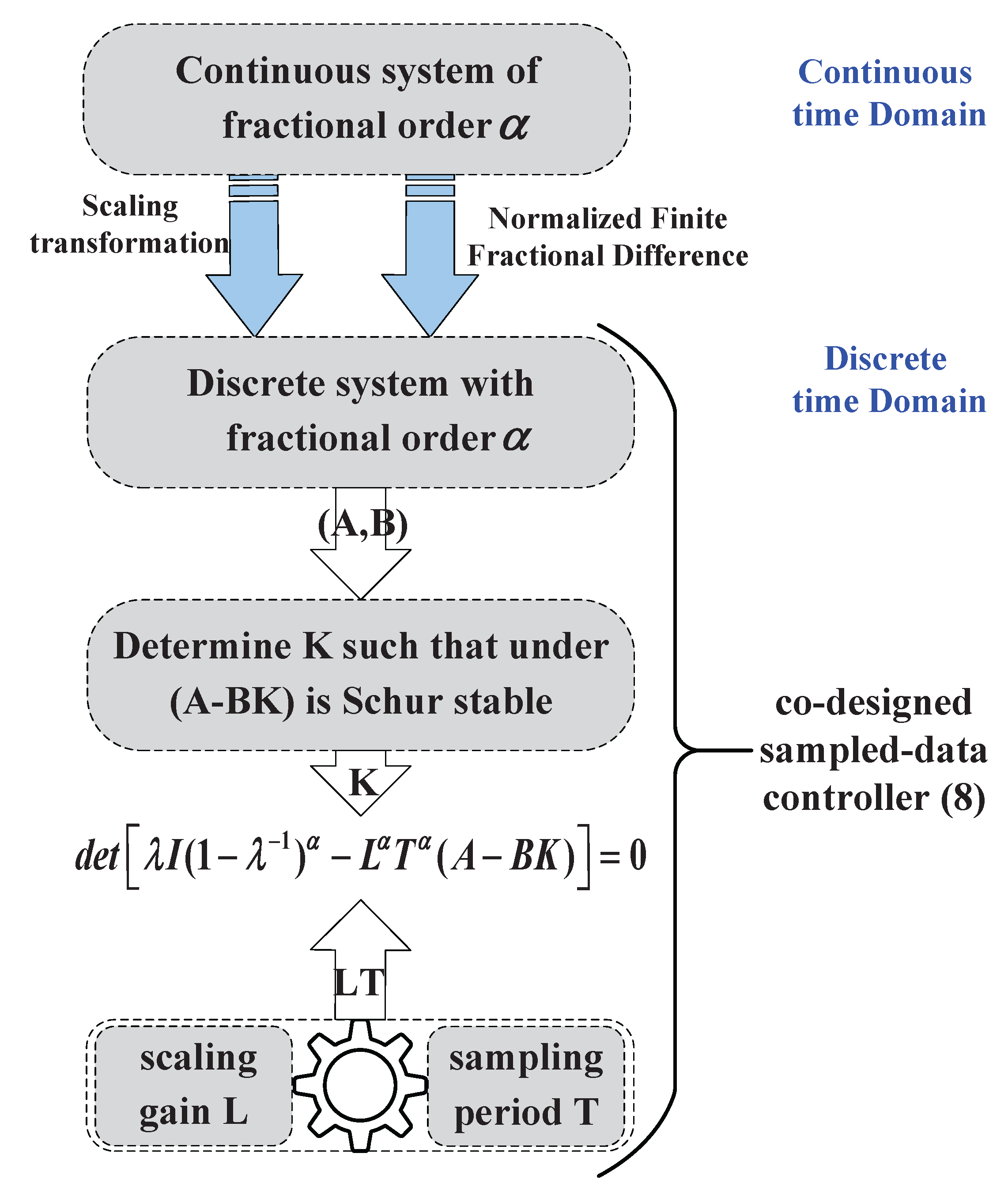
3. Main Results
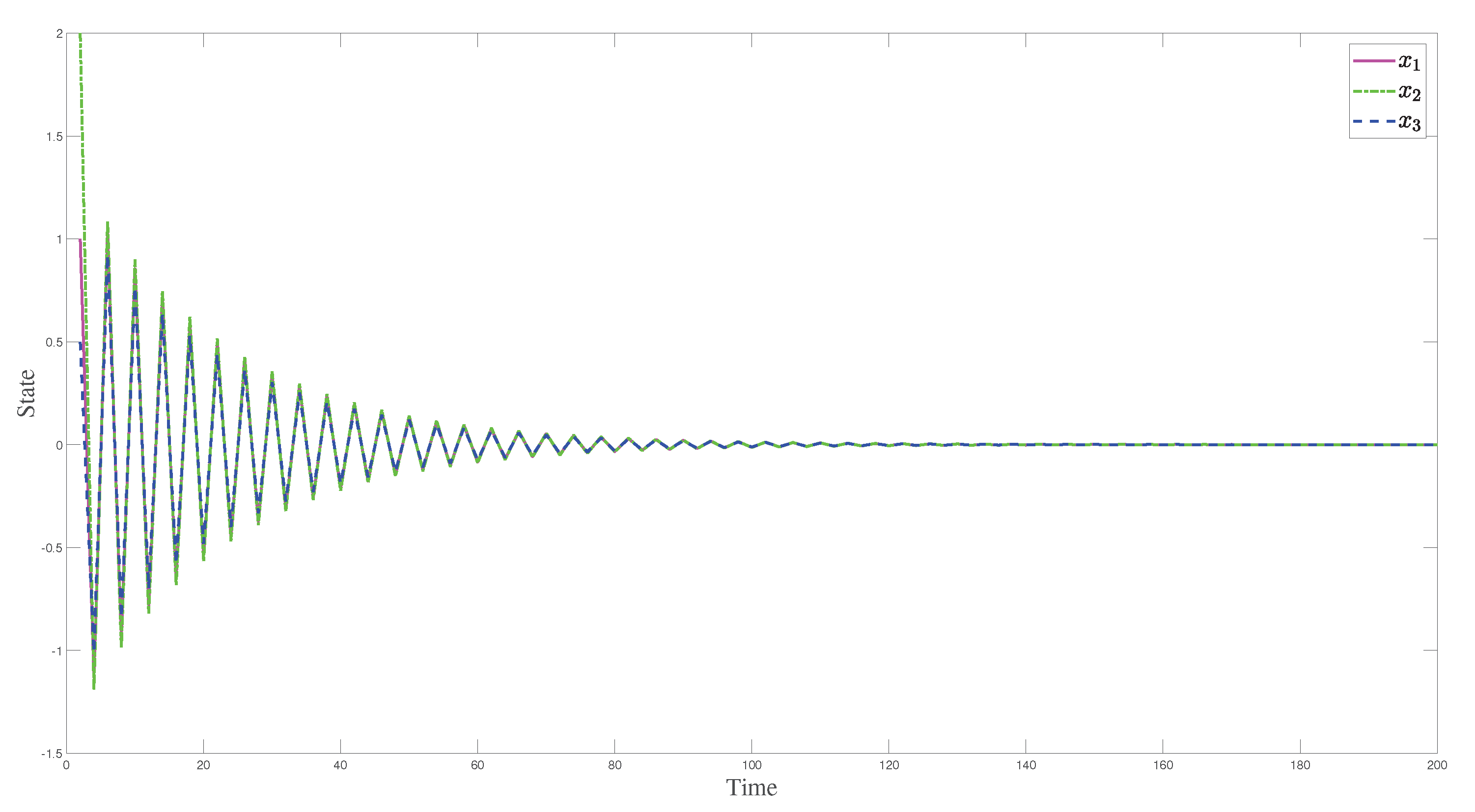
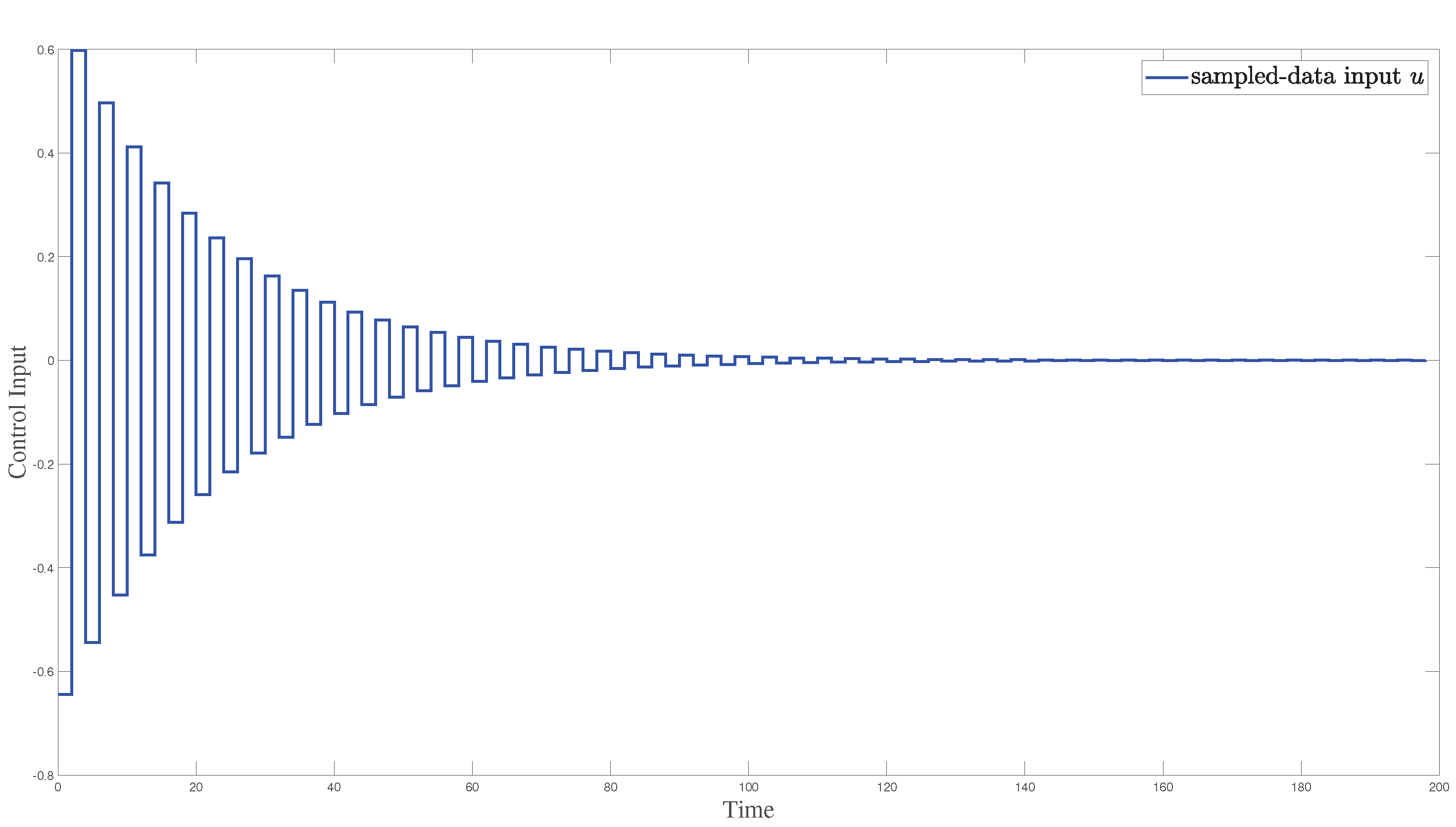
4. Simulation Results
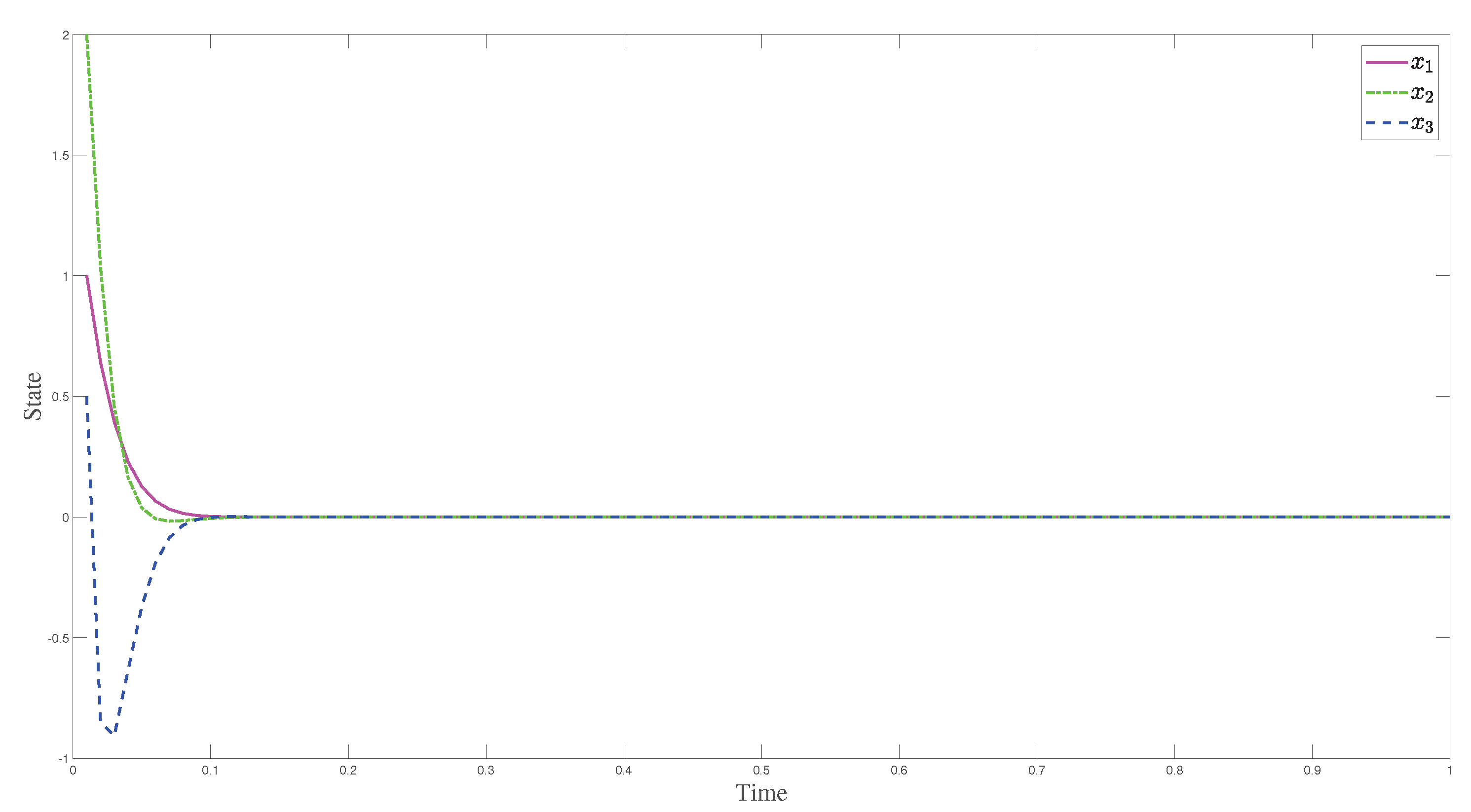
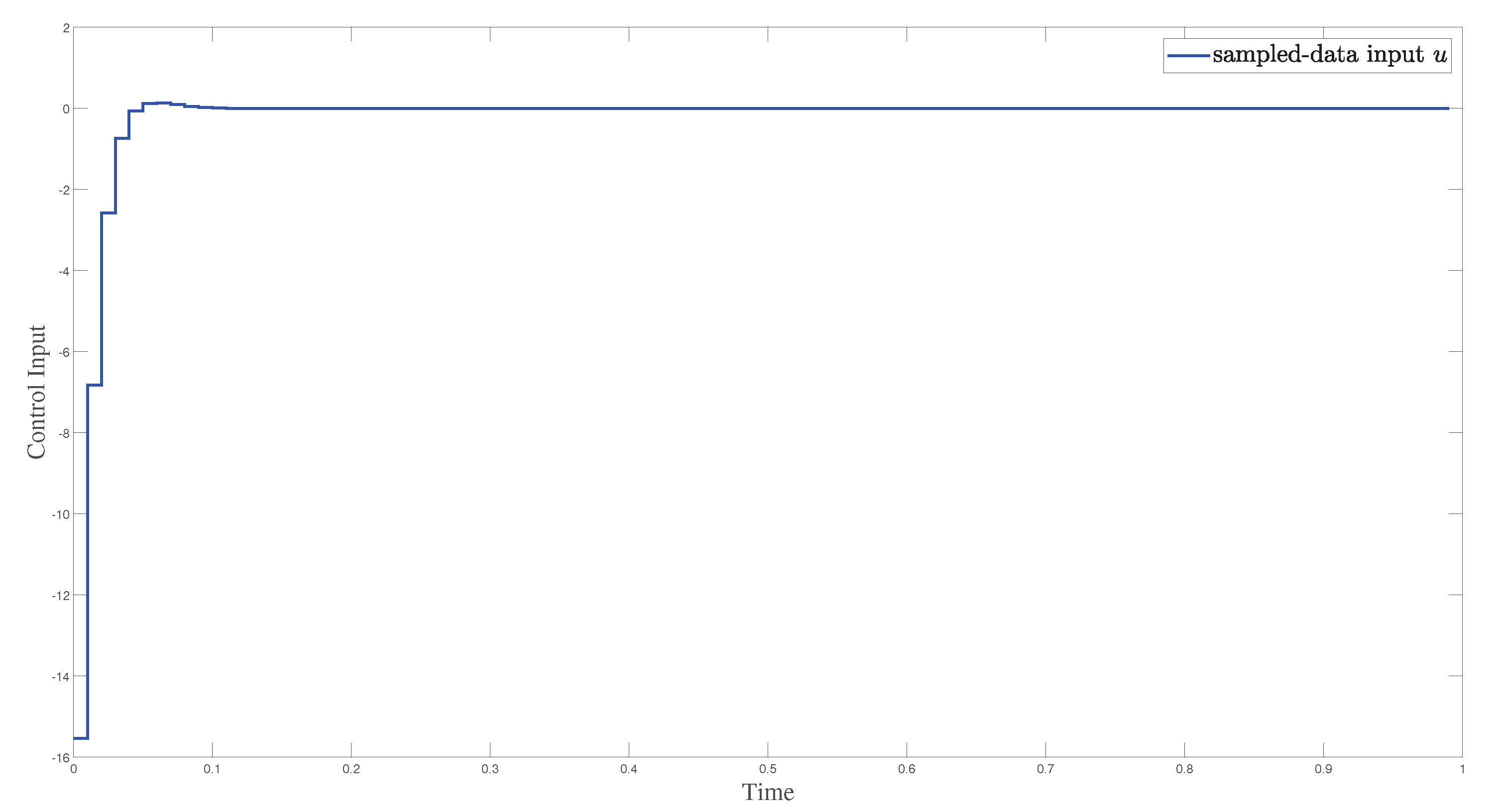
4.1. Sampled-Data Stabilization under Small Sampling Period
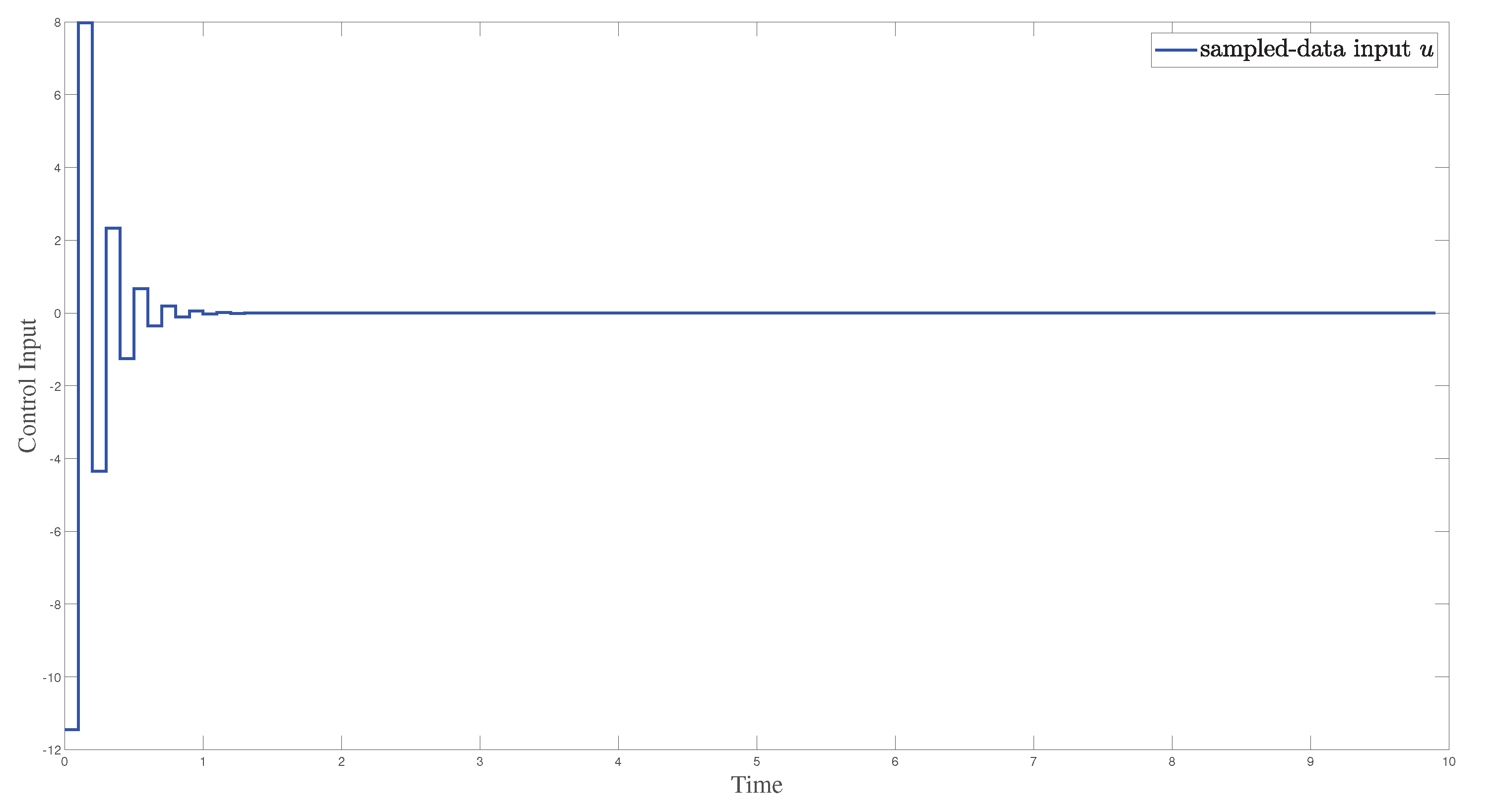
4.2. Sampled-Data Stabilization under Large Sampling Period
4.3. Sampled-Data Stabilization Using the Oldest Information
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Tarasov, V.E. Review of Some Promising Fractional Physical Models. Int. J. Mod. Phys. B 2013, 27, 1–32. [Google Scholar] [CrossRef] [Green Version]
- Sunny, M.R.; Kapania, R.K.; Moffitt, R.D.; Mishra, A.; Goulbourne, N. A Modified Fractional Calculus Approach to Model Hysteresis. J. Appl. Mech. 2010, 77, 031004. [Google Scholar] [CrossRef]
- Zhang, X. Relationship between integer order systems and fractional order system and its two applications. IEEE/CAA J. Autom. Sin. 2018, 5, 639–643. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y. Fractional Order Motion Controls; John Wiley & Sons, Ltd., Publication: Chichester, UK, 2012. [Google Scholar]
- Petras, I. Fractional-Order Nonlinear Systems Modeling, Analysis and Simulation; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Rajagopal, A.; Hasanzadeh, N.; Parastesh, F.; Hamarash, I.I.; Jafari, S.; Hussain, I. A fractional-order model for the novel coronavirus (COVID-19) outbreak. Nonlinear Dyn. 2020, 101, 711–718. [Google Scholar] [CrossRef] [PubMed]
- Cao, K.; Chen, Y.; Stuart, D. A fractional micro-macro model for crowds of pedestrians based on fractional mean field games. IEEE/CAA J. Autom. Sin. 2016, 3, 261–270. [Google Scholar]
- Arshad, S.; Sohail, A.; Javed, S. Dynamical Study of Fractional Order Tumor Model. Int. J. Comput. Methods 2015, 12, 1550032. [Google Scholar] [CrossRef]
- Edet, E.; Katebi, R. On Fractional-order PID Controllers. IFAC-PapersOnLine 2018, 51, 739–744. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, W.; Wang, Q.G. Robust H∞ Adaptive Sliding Mode Fault Tolerant Control for T-S Fuzzy Fractional Order Systems with Mismatched Disturbances. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1297–1307. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, W. Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties. Fractal Fract. 2020, 4, 50. [Google Scholar] [CrossRef]
- Gao, Z.; Liao, X.Z. A stability criterion for linear fractional order systems in frequency domain. Zidonghua Xuebao/Acta Autom. Sin. 2011, 37, 1387–1394. [Google Scholar]
- Zhang, X.; Lin, C.; Chen, Y.Q.; Boutat, D. A Unified Framework of Stability Theorems for LTI Fractional Order Systems with 0 < α < 2. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3237–3241. [Google Scholar]
- Bohner, M.; Tunç, O.; Tunç, C. Qualitative analysis of caputo fractional integro-differential equations with constant delays. Comput. Appl. Math. 2021, 40, 1–17. [Google Scholar] [CrossRef]
- Yang, Q.; Chen, D.; Zhao, T.; Chen, Y. Fractional calculus in image processing: A review. Fract. Calc. Appl. Anal. 2016, 19, 1222–1249. [Google Scholar] [CrossRef] [Green Version]
- Gardner, S.A. Exploring Fractional Order Calculus as an Artificial Neural Network Augmentation. Master’s Thesis, Montana State University, Bozeman, MT, USA, 2009. [Google Scholar]
- Pan, I.; Saptarshi, S. Applied fractional calculus for computational intelligence researchers. In Intelligent Fractional Order Systems and Control: An Introduction; Springer: Berlin/Heidelberg, Germany, 2013; pp. 9–61. [Google Scholar]
- Åström, K.J.; Wittenmark, B. Computer-Controlled Systems: Theory and Design; Prentice Hall: Hoboken, NJ, USA, 1997. [Google Scholar]
- Dzieliński, A.; Sierociuk, D. Stability of Discrete Fractional Order State-space Systems. J. Vib. Control. 2008, 14, 1543–1556. [Google Scholar] [CrossRef]
- Liu, T.; Wei, Y.; Yin, W.; Wang, Y.; Liang, Q. State estimation for nonlinear discrete-time fractional systems: A Bayesian perspective. Signal Process. 2019, 165, 250–261. [Google Scholar] [CrossRef]
- Yuan, X.; Mo, L.; Yu, Y.; Ren, G. Containment control of fractional discrete-time multi-agent systems with nonconvex constraints. Appl. Math. Comput. 2021, 409, 126378. [Google Scholar] [CrossRef]
- Cao, J.; Chen, Y.; Li, C. Multi-UAV-based Optimal Crop-dusting of Anomalously Diffusing Infestation of Crops. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 1278–1283. [Google Scholar]
- Chen, Y.; Xue, D.; Dou, H. Fractional Calculus and Biomimetic Control. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (RoBio04), Shenyang, China, 22–26 August 2004; pp. 901–906. [Google Scholar]
- Abdelaziz, M.A.M.; Ismail, A.I.; Abdullah, F.A.; Mohd, M.H. Discrete-Time Fractional Order SIR Epidemic Model with Saturated Treatment Function. Int. J. Nonlinear Sci. Numer. Simul. 2020, 21, 397–424. [Google Scholar] [CrossRef]
- Stanislawski, R.; Latawiec, K.J. Normalized finite fractional differences: Computational and accuracy breakthroughs. Int. J. Appl. Math. Comput. Sci. 2012, 22, 907–919. [Google Scholar] [CrossRef]
- Shahamatkhah, E.; Tabatabaei, M. Leader-following consensus of discrete-time fractional-order multi-agent systems. Chin. Phys. B 2018, 27, 010701. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Jiang, H.; Hu, C.; Yu, J. Necessary and Sufficient Conditions for Consensus of Fractional-Order Multiagent Systems via Sampled-Data Control. IEEE Trans. Cybern. 2017, 47, 1892–1901. [Google Scholar] [CrossRef] [PubMed]
- Cao, K.; Qian, C.; Gu, J. Sampled-data control of a class of uncertain nonlinear systems based on direct method. Syst. Control. Lett. 2021, 155, 105000. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional Order Systems and Controls: Fundamentals and Applications; Springer: London, UK, 2010. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley & Sons: New York, NY, USA, 1993. [Google Scholar]
- Stanislawski, R.; Latawiec, K.J. Stability analysis for discrete-time fractional-order LTI state-space systems. Part I: New necessary and sufficient conditions for the asymptotic stability. Bull. Pol. Acad. Sci. Tech. Sci. 2013, 61, 353–361. [Google Scholar] [CrossRef] [Green Version]
- Cao, K.; Qian, C.; Gu, J.; Hua, L. Co-designed sampled-data output consensus for multi-agent systems. Int. J. Robust Nonlinear Control. 2021, 31, 5762–5775. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, K.; Gu, J.; Mao, J.; Liu, C. Sampled-Data Stabilization of Fractional Linear System under Arbitrary Sampling Periods. Fractal Fract. 2022, 6, 416. https://doi.org/10.3390/fractalfract6080416
Cao K, Gu J, Mao J, Liu C. Sampled-Data Stabilization of Fractional Linear System under Arbitrary Sampling Periods. Fractal and Fractional. 2022; 6(8):416. https://doi.org/10.3390/fractalfract6080416
Chicago/Turabian StyleCao, Kecai, Juping Gu, Jingfeng Mao, and Chenglin Liu. 2022. "Sampled-Data Stabilization of Fractional Linear System under Arbitrary Sampling Periods" Fractal and Fractional 6, no. 8: 416. https://doi.org/10.3390/fractalfract6080416
APA StyleCao, K., Gu, J., Mao, J., & Liu, C. (2022). Sampled-Data Stabilization of Fractional Linear System under Arbitrary Sampling Periods. Fractal and Fractional, 6(8), 416. https://doi.org/10.3390/fractalfract6080416