



A Plea for the Integration of Fractional Differential Systems: The Initial Value Problem


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. The ODE Initial-Value Problem (or Cauchy Problem [1])
2.2. The FDE/FDS Initial Value Problem
3. Integration of FDE/FDS Based on Derivative Definitions
3.1. Riemann–Liouville Integral
3.2. Fractional Derivatives Definitions
3.2.1. Caputo Derivative Definition
3.2.2. Riemann–Liouville Derivative Definition
3.2.3. The Grünwald–Letnikov Derivative
4. The Infinite State Approach
4.1. Introduction
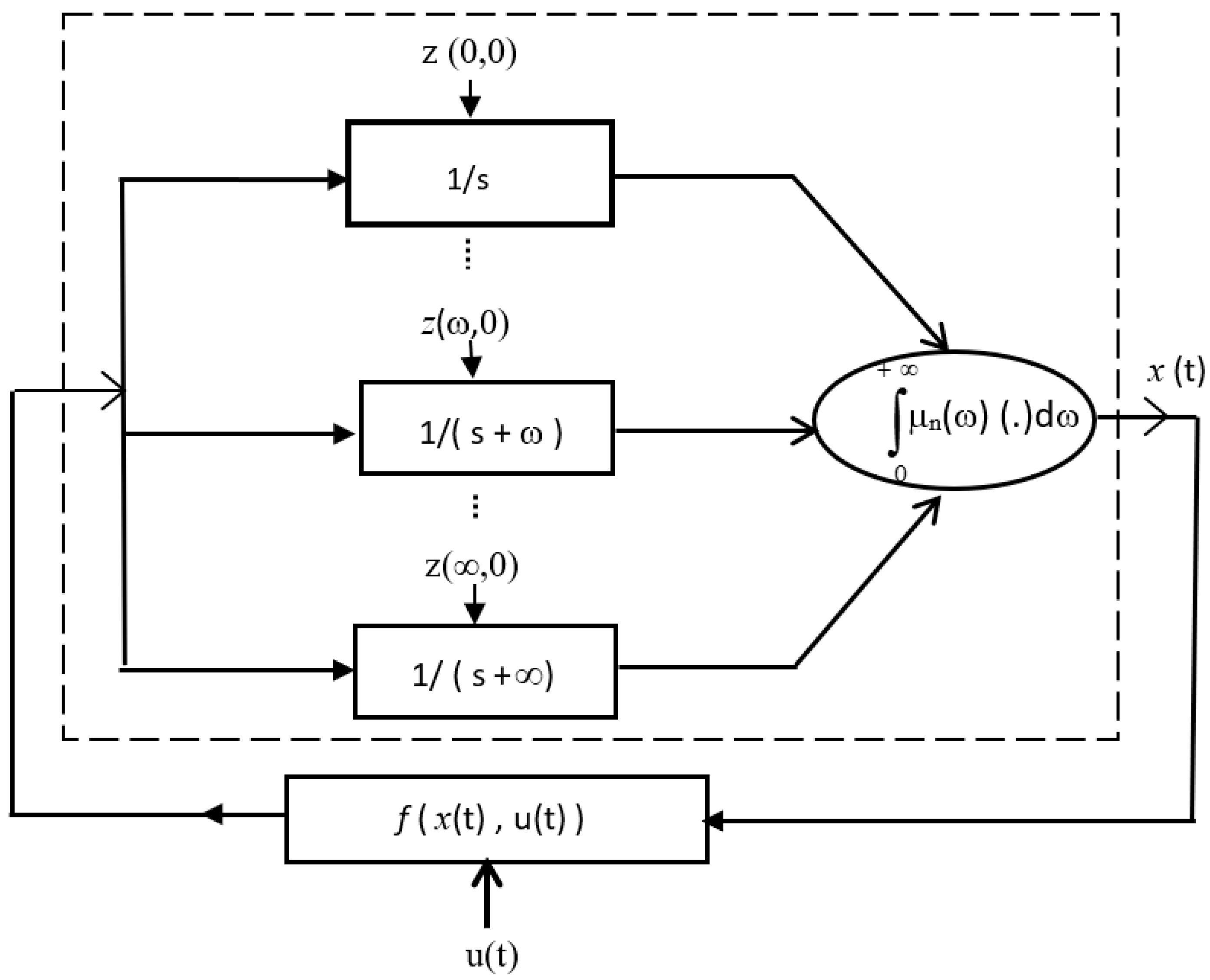
4.2. The Frequency-Distributed Model of the Fractional Integrator
- -
- the Equation is the input/output representation of the fractional integrator, characterized by its impulse response and its frequency response .
- -
- the distributed differential system (28) is the infinite-dimension state-space model of the integrator, where the internal state permits a complete representation of system dynamics and particularly its free response from an initial condition .
4.3. Transients of the Fractional Integrator
- -
- is the free response of the fractional integrator initialized by the distributed initial conditions .
- -
- is the forced response of the fractional integrator caused by the input .
5. A Counter Example
5.1. Problem Formulation
5.2. The Exact Solution
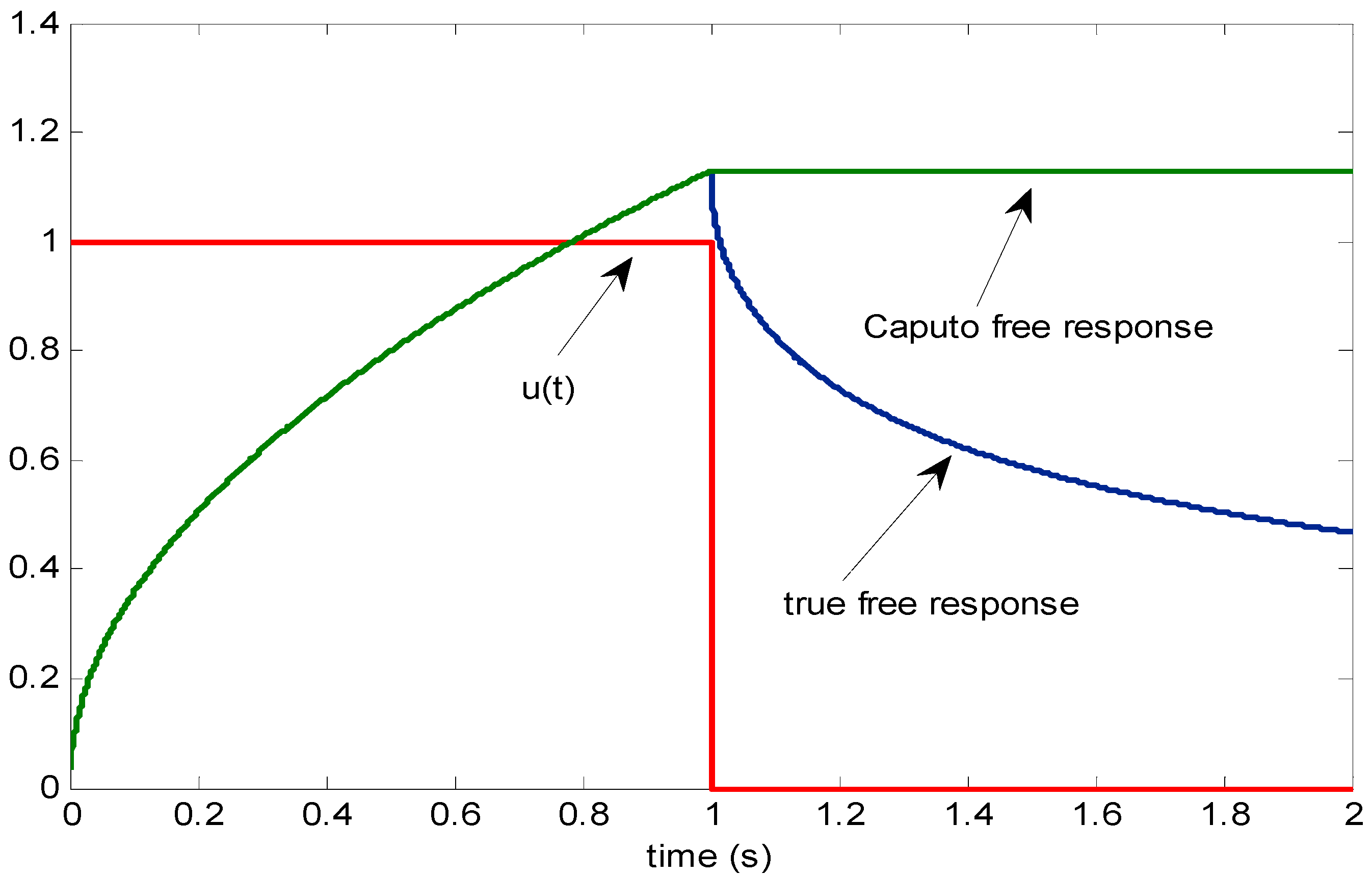
5.3. Solution Derived from the Caputo Derivative Definition
5.4. Solution Derived from the Distributed Frequency Model of the Fractional Integrator
5.5. Conclusions
- -
- The integration of FDE/FDS based on the Caputo derivative definition (or on the Riemann–Liouville derivative) are wrong approaches leading to erroneous free responses.
- -
- The frequency-distributed state-space model provides the exact expression of the free response using the usual tools of linear system theory. Consequently, this distributed model is the necessary tool to express transients of the fractional integrator and thus those of FDE/FDS.
5.6. The Caputo Derivative Definition Revisited
- -
- The exact initial conditions of the Caputo derivative are and the distributed state variable initial condition .
- -
- The technique based on the Caputo derivative is not natural because the true and physical initial conditions are those of the fractional integrator of Equation (30), i.e., , such as in the integer order case.
6. Fractional Differential Systems Transients
6.1. Integration of a FDE
- -
- Equation (42) and Figure 3 correspond to the pseudo-state variable , directly taking into account the fractional order n.
- -
- Equation (44) and Figure 4 correspond to the system of distributed state variables , whose solution is obtained through an integer-order approach. The pseudo-state variable is provided by a weighted integral, where is the link between the integer order and fractional order domains.
6.2. FDS Transients and the Mittag–Leffler Function
6.3. FDS Transients Expressed with the Distributed Exponential Function
6.4. Computation of the Distributed Exponential Function
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Coddington, E.A.; Levinson, N. Theory of Ordinary Differential Equations; Mc Graw Hill: New York, NY, USA, 1955. [Google Scholar]
- Tenenbaum, M.; Pollard, H. Ordinary Differential Equations; Harper and Row: New York, NY, USA, 1963. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Diethelm, K. The Analysis of Fractional Differential Equations; Lecture Notes in Mathematics; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Caputo, M. Elasticita e Dissipazione; Zanichelli: Bologna, Italy, 1969. [Google Scholar]
- Fukunaga, M.; Shimizu, N. Role of pre-histories in the initial value problems of fractional viscoelastic equations. Nonlinear Dyn. 2004, 38, 207–220. [Google Scholar] [CrossRef]
- Du, M.; Wang, Z. Initialized fractional differential equations with Riemann-Liouville fractional order derivative. In Proceedings of the ENOC 2011 Conference, Rome, Italy, 24–29 July 2011. [Google Scholar]
- Du, M.; Wang, Z. Correcting the initialization of models with fractional derivatives via history dependent conditions. Acta Mech. Sin. 2016, 32, 320–325. [Google Scholar] [CrossRef]
- Hartley, T.T.; Lorenzo, C.F. The error incurred in using the Caputo derivative Laplace transform. In Proceedings of the ASME IDET-CIE Conferences, San Diego, CA, USA, 30 August–2 September 2009. [Google Scholar]
- Sabatier, J.; Merveillaut, M.; Malti, R.; Oustaloup, A. How to impose physically coherent initial conditions to a fractional system? Commun. Non Linear Sci. Numer. Simul. 2010, 15, 1318–1326. [Google Scholar] [CrossRef]
- Ortigueira, M.D. Fractional Calculus for Scientists and Engineers; Springer Science: New York, NY, USA, 2011. [Google Scholar]
- Trigeassou, J.C.; Maamri, N.; Oustaloup, A. The Caputo derivative and the infinite state approach. In Proceedings of the 6th Workshop on Fractional Differentiation and its Applications, Grenoble, France, 4–6 February 2013. [Google Scholar]
- Sabatier, J.; Farges, C. Comments on the description and initialization of fractional partial differential equations using Riemann-Liouville’s and Caputo’s definitions. J. Comput. Appl. Math. 2018, 339, 30–39. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C. Initial value problems should not be associated to fractional model descriptions whatever the derivative definition used. AIMS Math. 2021, 6, 11318–11329. [Google Scholar] [CrossRef]
- Lorenzo, C.F.; Hartley, T.T. Initialization in fractional order systems. In Proceedings of the European Control Conference (ECC’01), Porto, Portugal, 4–7 September 2001; pp. 1471–1476. [Google Scholar]
- Hartley, T.T.; Lorenzo, C.F. The initialization response of linear fractional order system with constant History function. In Proceedings of the 2009 ASME/IDETC, San Diego, CA, USA, 30 August–2 September 2009. [Google Scholar]
- Hartley, T.T.; Lorenzo, C.F. The initialization response of linear fractional order system with ramp History function. In Proceedings of the 2009 ASME/IDETC, San Diego, CA, USA, 30 August–2 September 2009. [Google Scholar]
- Lorenzo, C.F.; Hartley, T.T. Initialization of fractional differential equation. ASME J. Comput. Nonlinear Dyn. 2007, 4806, 1341–1347. [Google Scholar]
- Lorenzo, C.; Hartley, T. Time-varying initialization and Laplace transform of the Caputo derivative: With order between zero and one. In Proceedings of the IDETC/CIE FDTA’2011 Conference, Washington DC, USA, 14–17 August 2011. [Google Scholar]
- Hartley, T.T.; Lorenzo, C.F.; Trigeassou, J.C.; Maamri, N. Equivalence of history function based and infinite dimensional state initializations for fractional order operators. ASME J. Comput. Nonlinear Dyn. 2013, 8, 041014. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N.; Oustaloup, A. The infinite state approach: Origin and necessity. Comput. Math. Appl. 2013, 66, 892–907. [Google Scholar] [CrossRef]
- Tari, M.; Maamri, N.; Trigeassou, J.C. Initial conditions and initialization of fractional systems. ASME J. Comput. Nonlinear Dyn. 2016, 11, 041014. [Google Scholar] [CrossRef]
- Maamri, N.; Tari, M.; Trigeassou, J.C. Improved initialization of fractional order systems. In Proceedings of the 20th World IFAC Congress, Toulouse, France, 14 July 2017; pp. 8567–8573. [Google Scholar]
- Khalil, R.; Yousef, A.; Sababdeh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atanackovic, T.M.; Pilipovic, S.; Zorica, D. Properties of the Caputo-Fabrizio fractional derivative and its distributional setting. Fract. Calc. Appl. Anal. 2018, 21, 29–44. [Google Scholar] [CrossRef]
- Martinez, F.; Othman Mohammed, P.; Napoles Valdes, J.E. Non-conformable fractional Laplace transform. Kragujev. J. Math. 2022, 46, 341–354. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Machado, J.T. A critical analysis of the Caputo-Fabrizio operator. Commun. Nonlinear Sci Numer. Simulat. 2018, 59, 608–611. [Google Scholar] [CrossRef]
- Tarasov, V.E. No nonlocality, no fractional derivative. Commun. Nonlinear Sci Numer. Simulat. 2018, 62, 157–163. [Google Scholar] [CrossRef]
- Montseny, G. Diffusive Representation of Pseudo Differential Time Operators. ESAIM Proc. 1998, 5, 159–175. [Google Scholar] [CrossRef]
- Heleschewitz, D.; Matignon, D. Diffusive realizations of fractional integro-differential operators: Structural analysis under approximation. In Proceedings of the Conference IFAC, System, Structure and Control, Nantes, France, 8–10 July 1998; Volume 2, pp. 243–248. [Google Scholar]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. Transients of fractional order integrator and derivatives. In Special Issue: “Fractional Systems and Signals” of Signal, Image and Video Processing; Springer: Berlin/Heidelberg, Germany, 2012; Volume 6, pp. 359–372. [Google Scholar]
- Trigeassou, J.C.; Maamri, N. Analysis, Modeling and Stability of Fractional Order Differential Systems: The Infinite State Approach; John Wiley and Sons: Hoboken, NJ, USA, 2019; Volumes 1 and 2. [Google Scholar]
- Trigeassou, J.C.; Poinot, T.; Lin, J.; Oustaloup, A.; Levron, F. Modeling and identification of a non integer order system. In Proceedings of the ECC’99 European Control Conference, Karlsruhe, Germany, 31 August–3 September 1999. [Google Scholar]
- Lin, J.; Poinot, T.; Trigeassou, J.C. Parameter estimation of fractional systems: Application to the modeling of a lead-acid battery. In Proceedings of the 12th IFAC Symposium on System Identification, Santa Barbara, CA, USA, 21–23 June 2000. [Google Scholar]
- Benchellal, A.; Poinot, T.; Trigeassou, J.C. Approximation and identification of diffusive interface by fractional models. Signal Process. 2006, 86, 2712–2727. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. State variables and transients of fractional order differential systems. Comput. Math. Appl. 2012, 64, 3117–3140. [Google Scholar]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. A Lyapunov approach to the stability of fractional differentiel equations. Signal Process. 2011, 91, 437–445. [Google Scholar] [CrossRef]
- Du, B.; Wei, Y.; Liang, S.; Wang, Y. Estimation of exact initial states of fractional order systems. Nonlinear Dyn. 2016, 86, 2061–2070. [Google Scholar] [CrossRef]
- Yuan, J.; Zhang, Y.; Liu, J.; Shi, B. Equivalence of initialized fractional integrals and the diffusive model. ASME J. Comput. Nonlinear Dyn. 2018, 13, 034501. [Google Scholar] [CrossRef]
- Zhao, Y.; Wei, Y.; Chen, Y.; Wang, Y. A new look at the fractional initial value problem: The aberration phenomenon. ASME J. Comput. Nonlinear Dyn. 2018, 13, 121004. [Google Scholar] [CrossRef]
- Yuan, J.; Shi, B.; Ji, W. Adaptive sliding mode control of a novel class of fractional chaotic systems. Adv. Math. Phys. 2013, 13. [Google Scholar] [CrossRef]
- Wang, B.; Ding, J.; Wu, F.; Zhu, D. Robust finite time control of fractional order nonlinear systems via frequency distributed model. Nonlinear Dyn. 2016, 85, 2133–2142. [Google Scholar] [CrossRef]
- Chen, Y.; Wei, Y.; Zhou, X.; Wang, Y. Stability for nonlinear fractional order systems: An indirect approach. Nonlinear Dyn. 2017, 89, 1011–1018. [Google Scholar] [CrossRef]
- Wei, Y.; Sheng, D.; Chen, Y.; Wang, Y. Fractional order chattering free robust adaptive backstepping control technique. Nonlinear Dyn. 2019, 95, 2383–2394. [Google Scholar] [CrossRef]
- Hinze, M.; Schmidt, A.; Leine, R.L. Numerical solution of fractional order ordinary differential equations using the reformulated infinite state representation. Fract. Calc. Appl. Anal. 2019, 22, 1321–1350. [Google Scholar] [CrossRef]
- Hinze, M.; Schmidt, A.; Leine, R.L. The direct method of Lyapunov for nonlinear dynamical systems with fractional damping. Nonlinear Dyn. 2020, 102, 2017–2037. [Google Scholar] [CrossRef]
- Maamri, N.; Trigeassou, J.C. Integration of fractional differential equations without fractional derivatives. In Proceedings of the ICSC20 Conference, Caen France, 24–26 November 2021. [Google Scholar]
- Lindelöf, E. Sur l’application de la méthode des approximations successives aux équations différentielles ordinaires du premier ordre. C.R.A.C. 1894, 116, 454–457. [Google Scholar]
- Picard, E. Mémoire sur la théorie des équations aux dérivées partielles et la méthodes des approximations successives. J. Math. Pures Appl. 1890, 4, 145–210. [Google Scholar]
- Kailath, T. Linear Systems; Prentice Hall Inc.: Englewood Cliffs, NJ, USA, 1980. [Google Scholar]
- Monje, C.A.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional Order Systems and Control; Springer: London, UK, 2010. [Google Scholar]
- Curtain, R.F.; Zwart, H.J. An Introduction to Infinite Dimensional Linear Systems Theory; Springer: New York, NY, USA, 1995. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maamri, N.; Trigeassou, J.-C. A Plea for the Integration of Fractional Differential Systems: The Initial Value Problem. Fractal Fract. 2022, 6, 550. https://doi.org/10.3390/fractalfract6100550
Maamri N, Trigeassou J-C. A Plea for the Integration of Fractional Differential Systems: The Initial Value Problem. Fractal and Fractional. 2022; 6(10):550. https://doi.org/10.3390/fractalfract6100550
Chicago/Turabian StyleMaamri, Nezha, and Jean-Claude Trigeassou. 2022. "A Plea for the Integration of Fractional Differential Systems: The Initial Value Problem" Fractal and Fractional 6, no. 10: 550. https://doi.org/10.3390/fractalfract6100550
APA StyleMaamri, N., & Trigeassou, J.-C. (2022). A Plea for the Integration of Fractional Differential Systems: The Initial Value Problem. Fractal and Fractional, 6(10), 550. https://doi.org/10.3390/fractalfract6100550