
Image-Based Crack Detection Methods: A Review

 ,
,  ,
,  and
and
Abstract
:1. Introduction
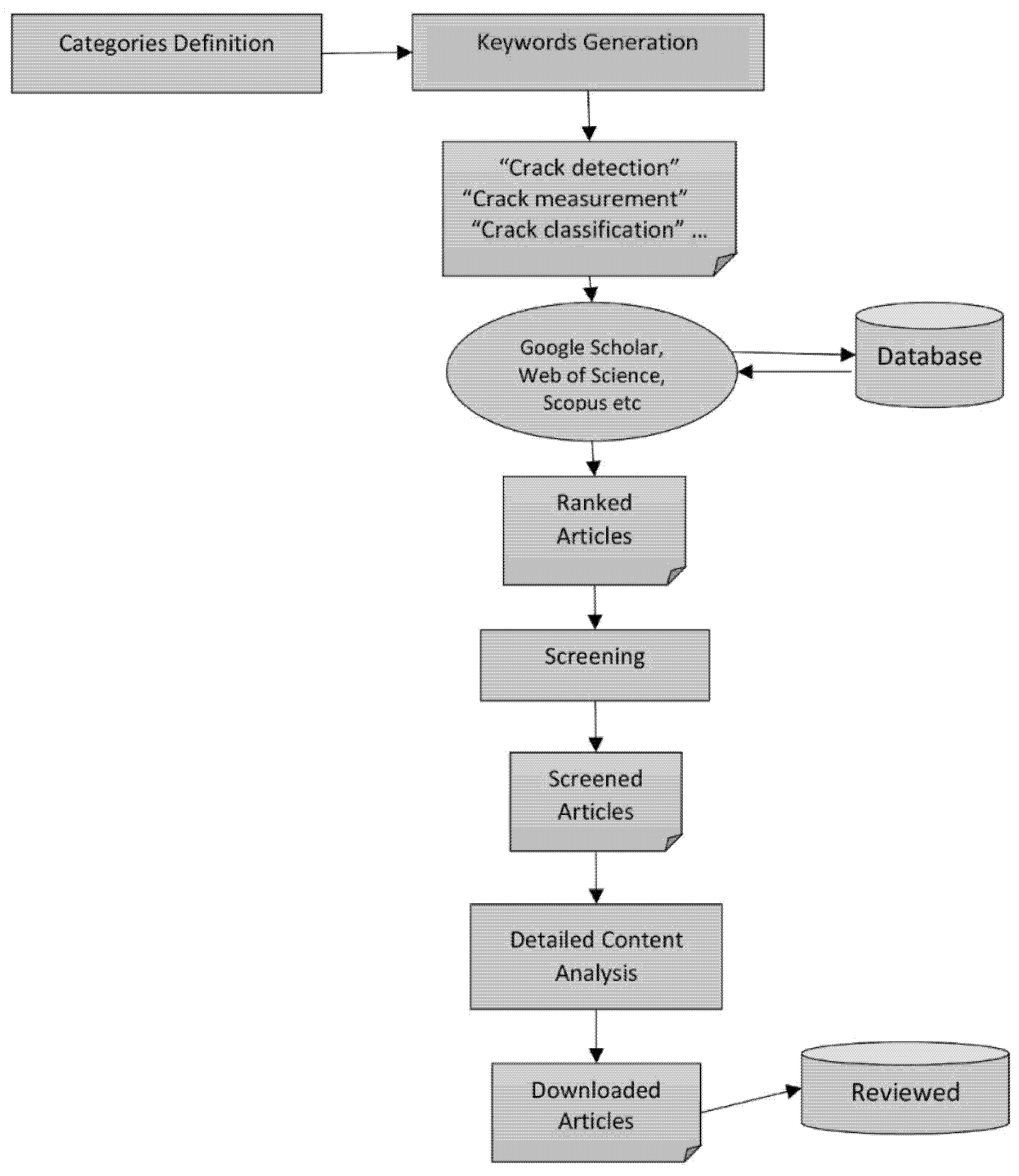
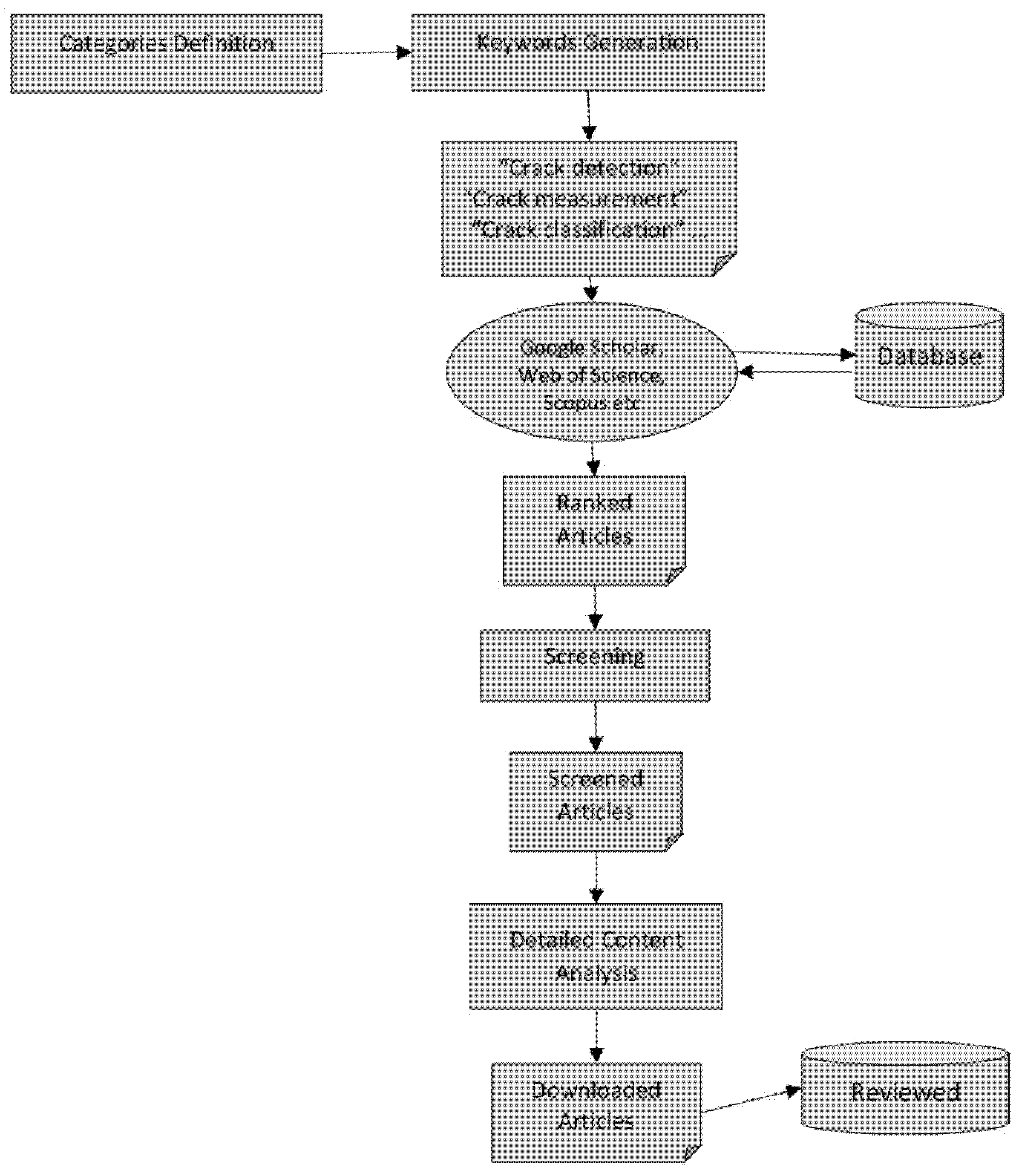
2. Materials and Methods
- (1)
- No duplicates
- (2)
- Time interval: 2010–2021
- (3)
- Document type: research article, abstract, book chapter
- (4)
- English language only
- Cat-1 Crack Detection using Machine Learning
- Cat-2: Crack Detection using Image Processing
- (1)
- Published between 2010 to 2020
- (2)
- English Language only
- (3)
- Websites must be: MDPI, Elsevier, IEEE Xplore, Arxiv, Science Direct
- (4)
- Article type must be research article, review or book chapter (letters, abstracts and comments are excluded)
- (5)
- No duplicates
3. Results
3.1. Image Processing Based Crack Detection
3.1.1. Tree Structures
3.1.2. Genetic Programming
3.1.3. Image Filters
3.1.4. Beamlet Transform
3.1.5. Unmanned Aerial System (UAS)-Based Approach
3.1.6. Shi-Tomasi Algorithm
3.2. Machine Learning-Based Crack Detection
3.2.1. Convolutional Neural Network (CNN)
3.2.2. K-Means Clustering
3.2.3. Logistic Regression
3.2.4. Feature Pyramid and Hierarchical Boosting Network (FPHBN)
3.2.5. Support Vector Machines (SVM)
3.2.6. SVM and Random Forest
3.2.7. SVM and Artificial Neural Network (NN)
3.2.8. Artificial Neural Network (ANN)
3.2.9. Random Structured Forests
3.2.10. Decision Tree
4. Analysis and Discussion
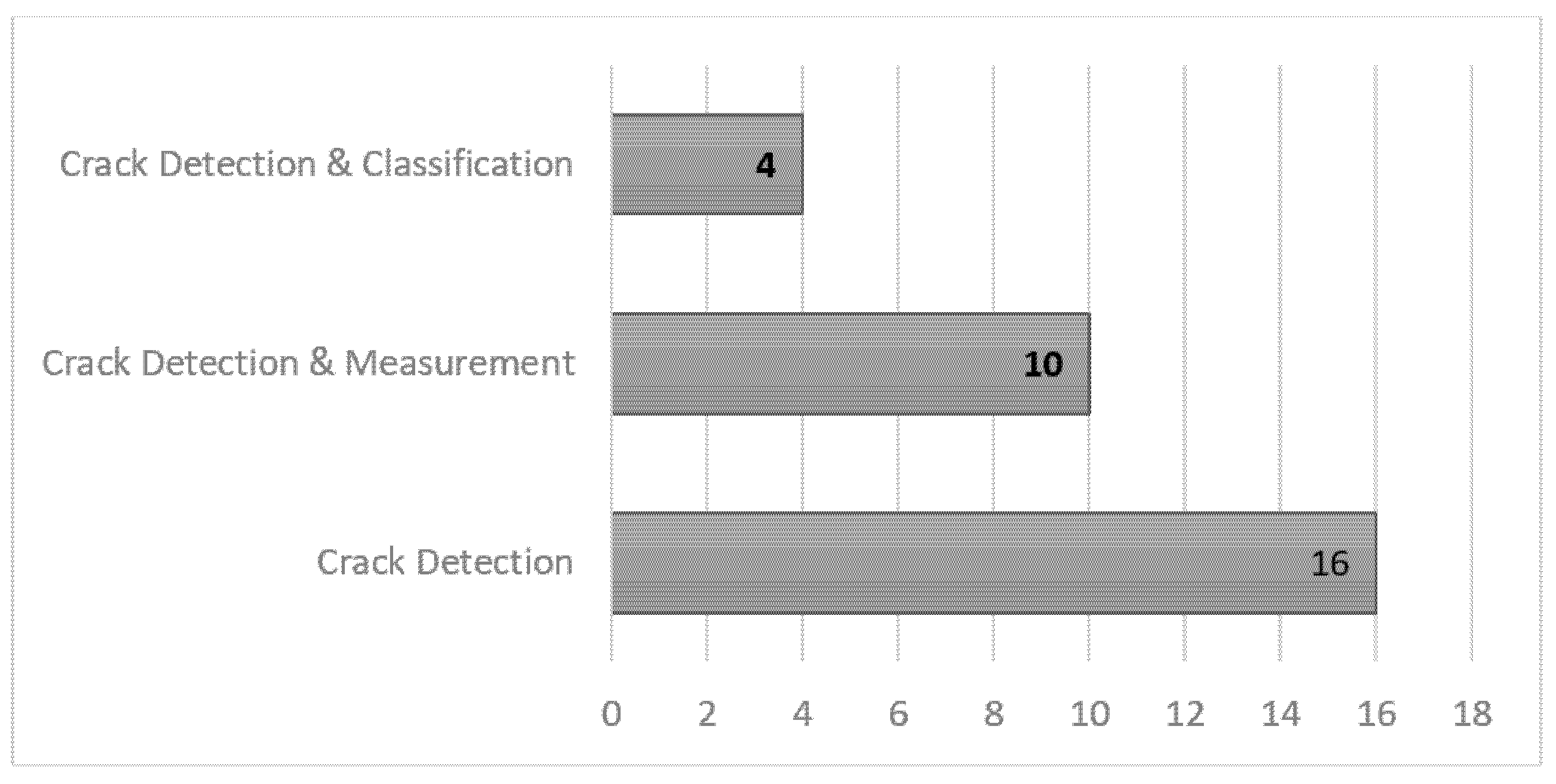
4.1. Functionality Based Analysis
4.2. Crack Classification Analysis
4.3. Crack Measurement Analysis
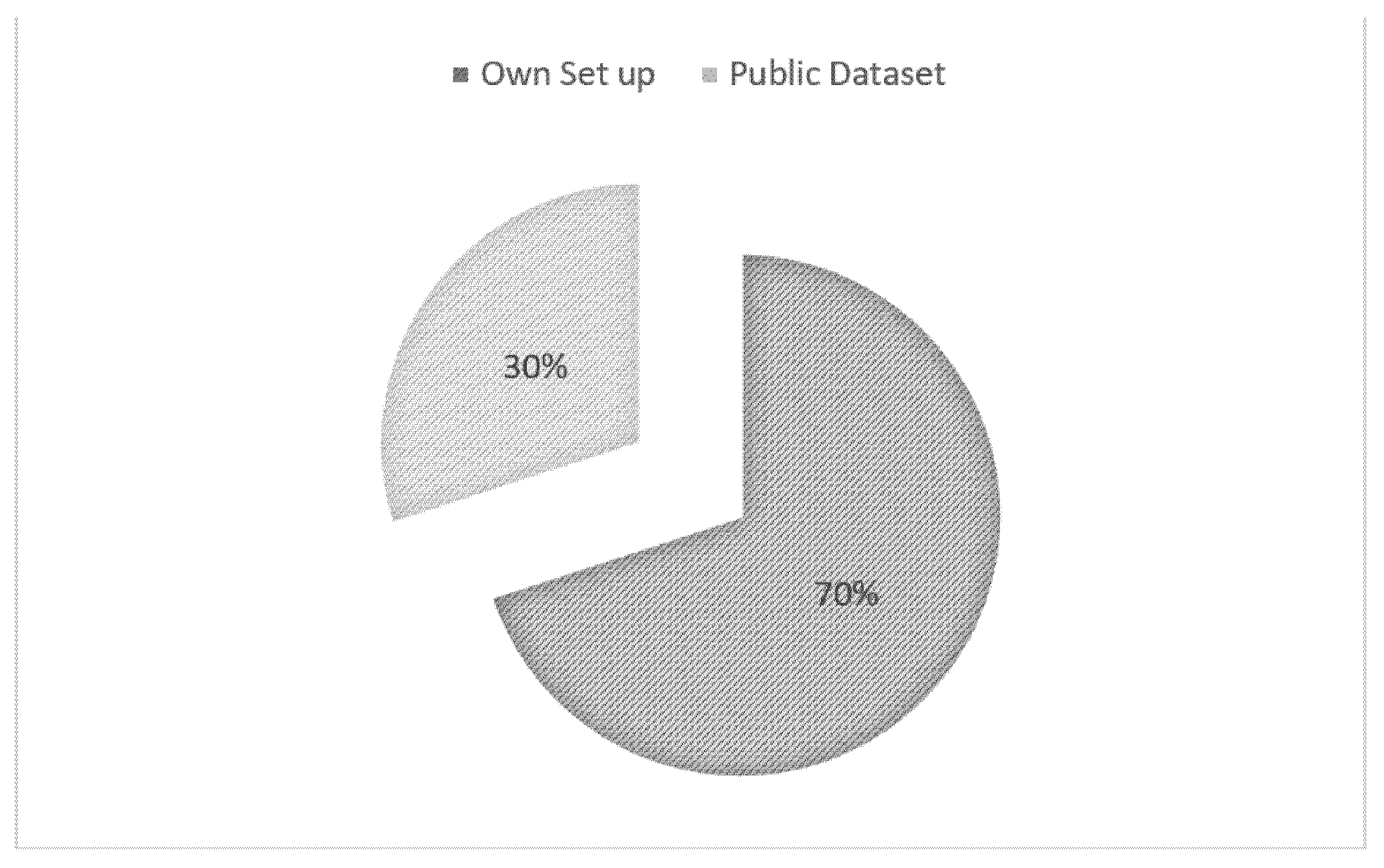
4.4. Image Source
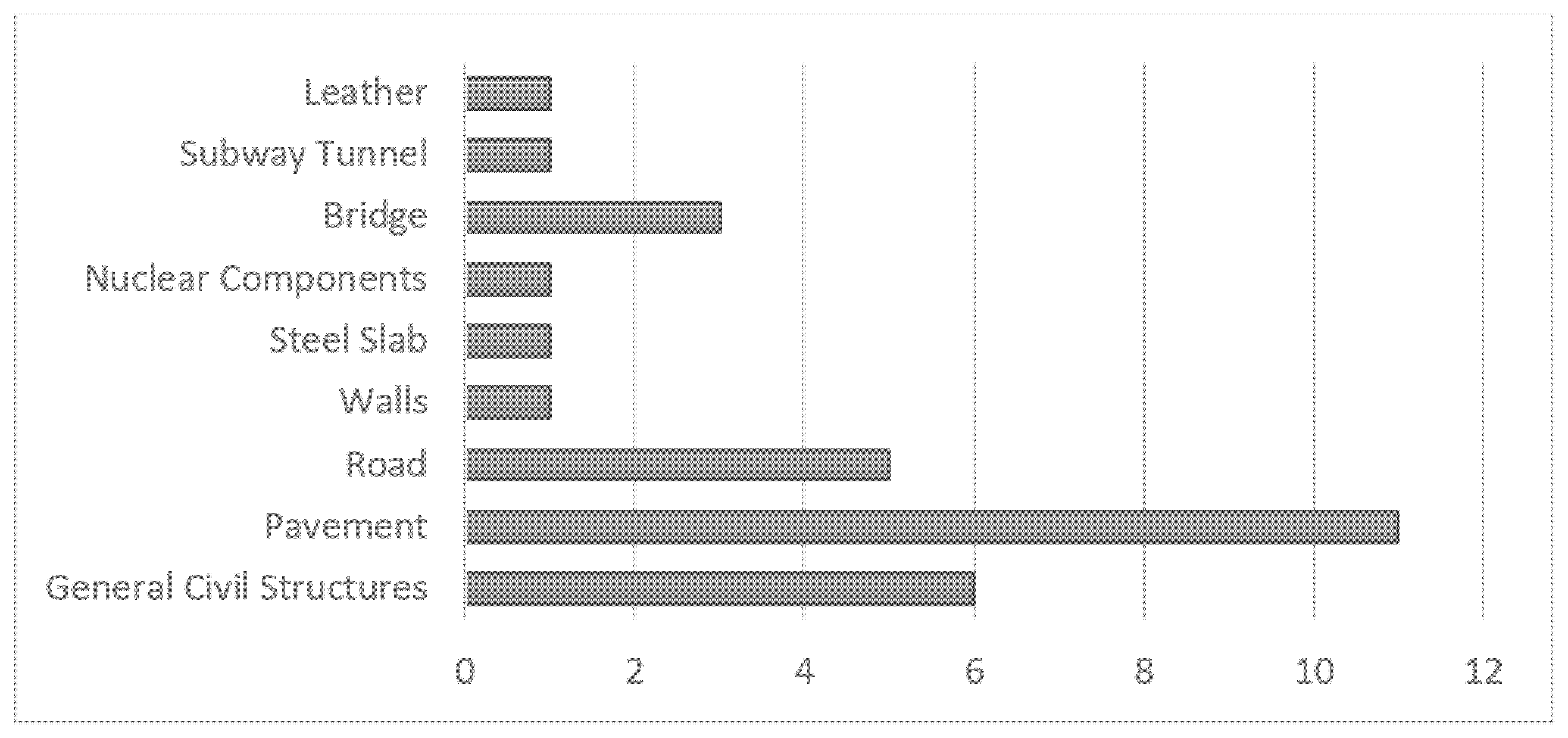
4.5. Domain of Crack Detection
4.6. Precision Level
5. Gaps and Challenges
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ni, F.; Zhang, J.; Chen, Z. Pixel level crack delineation in images with convolutional feature fusion. Struct. Control. Health Monit. 2019, 26, e2286. [Google Scholar] [CrossRef] [Green Version]
- Liong, S.T.; Gan, Y.S.; Huang, Y.C.; Yuan, C.A.; Chang, H.C. Automatic defect segmentation on leather with deep learning. arXiv 2019, arXiv:1903.12139. [Google Scholar]
- Zhang, L.; Yang, F.; Zhang, Y.D.; Zhu, Y.J. Road crack detection using a deep convolutional neural network. In Proceedings of the International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3708–3712. [Google Scholar]
- Zou, Q.; Cao, Y.; Li, Q.; Mao, Q.; Wang, S. CrackTree: Automatic crack detection from pavement images. Pattern Recognit. Lett. 2012, 33, 227–238. [Google Scholar] [CrossRef]
- Dung, C.V.; Anh, L.D. Autonomous concrete crack detection using deep fully convolutional neural network. Autom. Constr. 2019, 99, 52–58. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P.L. Automatic road cracks detection and characterization. IEEE Trans. Intell. Transp. Syst. 2012, 14, 155–168. [Google Scholar] [CrossRef]
- Prasanna, P.; Dana, K.J.; Gucunski, N.; Basily, B.B.; La, H.M.; Lim, R.S.; Parvardeh, H. Automated crack detection on concrete bridges. IEEE Trans. Autom. Sci. Eng. 2014, 13, 591–599. [Google Scholar] [CrossRef]
- Gavilán, M.; Balcones, D.; Marcos, O.; Llorca, D.F.; Sotelo, M.A.; Parra, I.; Ocaña, M.; Aliseda, P.; Yarza, P.; Amírola, A. Adaptive road crack detection system by pavement classification. Sensors 2011, 11, 9628–9657. [Google Scholar] [CrossRef] [PubMed]
- Zou, Q.; Zhang, Z.; Li, Q.; Qi, X.; Wang, Q.; Wang, S. Deepcrack: Learning hierarchical convolutional features for crack detection. IEEE Trans. Image Process. 2018, 28, 1498–1512. [Google Scholar] [CrossRef] [PubMed]
- Nishikawa, T.; Yoshida, J.; Sugiyama, T.; Fujino, Y. Concrete crack detection by multiple sequential image filtering. Comput. Civ. Infrastruct. Eng. 2012, 27, 29–47. [Google Scholar] [CrossRef]
- Adeli, H.; Cheng, N. Augmented Lagrangian genetic algorithm for structural optimization. J. Aerosp. Eng. 1994, 7, 104–118. [Google Scholar] [CrossRef]
- Lee, Y.; Wei, C.-H. A computerized feature selection using genetic algorithms to forecast freeway accident duration times. Comput. Civ. Infrastruct. Eng. 2010, 25, 132–148. [Google Scholar] [CrossRef]
- Liu, X.H.; Danczyk, A. Optimal sensor locations for freeway bottleneck identification. Comput. Aided Civ. Infrastruct. Eng. 2009, 24, 535–550. [Google Scholar] [CrossRef]
- Pauly, L.; Peel, H.; Luo, S.; Hogg, D.; Fuentes, D.H.A.R. Deeper networks for pavement crack detection. In Proceedings of the 34th ISARC, Taipei, Taiwan, 28 June–1 July 2017; pp. 479–485. [Google Scholar]
- Yang, X.; Li, H.; Yu, Y.; Luo, X.; Huang, T.; Yang, X. Automatic pixel-level crack detection and measurement using a fully convolutional network. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 1090–1109. [Google Scholar] [CrossRef]
- Salman, M.; Mathavan, S.; Kamal, K.; Rahman, M. Pavement crack detection using the Gabor filter. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 2039–2044. [Google Scholar]
- Lins, R.G.; Givigi, S. Automatic crack detection and measurement based on image analysis. IEEE Trans. Instrum. Meas. 2016, 65, 583–590. [Google Scholar] [CrossRef]
- Shi, Y.; Cui, L.; Qi, Z.; Meng, F.; Chen, Z. Automatic road crack detection using random structured forests. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3434–3445. [Google Scholar] [CrossRef]
- Wu, L.; Mokhtari, S.; Nazef, A.; Nam, B.; Yun, H.B. Improvement of crack detection accuracy using a novel crack defragmentation technique in image-based road assessment. J. Comput. Civ. Eng. 2016, 30, 04014118. [Google Scholar] [CrossRef]
- Chen, F.-C.; Jahanshahi, M.R. NB-CNN: Deep learning-based crack detection using convolutional neural network and Naïve Bayes data fusion. IEEE Trans. Ind. Electron. 2017, 65, 4392–4400. [Google Scholar] [CrossRef]
- Ying, L.; Salari, E. Beamlet transform-based technique for pavement crack detection and classification. Comput. Aided Civ. Infrastruct. Eng. 2010, 25, 572–580. [Google Scholar] [CrossRef]
- Landstrom, A.; Thurley, M. Morphology-based crack detection for steel slabs. IEEE J. Sel. Top. Signal Process. 2012, 6, 866–875. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Cheng, H.D.; Zhang, B. A unified approach to pavement crack and sealed crack detection using preclassification based on transfer learning. J. Comput. Civ. Eng. 2018, 32, 04018001. [Google Scholar] [CrossRef]
- Fujita, Y.; Hamamoto, Y. A robust automatic crack detection method from noisy concrete surfaces. Mach. Vis. Appl. 2011, 22, 245–254. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, L.; Yu, S.; Prokhorov, D.; Mei, X.; Ling, H. Feature pyramid and hierarchical boosting network for pavement crack detection. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1525–1535. [Google Scholar] [CrossRef] [Green Version]
- Fernández, A.C.; Rodríguez-Lozano, F.J.; Villatoro, R.; Olivares, J.; Palomares, J.M. Efficient pavement crack detection and classification. EURASIP J. Image Video Process. 2017, 2017, 1–11. [Google Scholar]
- Zhang, W.; Zhang, Z.; Qi, D.; Liu, Y. Automatic crack detection and classification method for subway tunnel safety monitoring. Sensors 2014, 14, 19307–19328. [Google Scholar] [CrossRef] [PubMed]
- Yeum, C.M.; Dyke, S.J. Vision—Based automated crack detection for bridge inspection. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 759–770. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Li, B.; Yang, E.; Dai, X.; Peng, Y.; Fei, Y.; Liu, Y.; Li, J.Q.; Chen, C. Automated pixel-level pavement crack detection on 3D asphalt surfaces using a deep-learning network. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 805–819. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F. Adaptive vision-based crack detection using 3D scene reconstruction for condition assessment of structures. Autom. Constr. 2012, 22, 567–576. [Google Scholar] [CrossRef]
- Bang, S.; Park, S.; Kim, H.; Kim, H. Encoder-decoder network for pixel-level road crack detection in black-box images. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 713–727. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Fatigue crack detection using unmanned aerial systems in fracture critical inspection of steel bridges. J. Bridge Eng. 2018, 23, 04018078. [Google Scholar] [CrossRef]
- Dorafshan, S.; Maguire, M.; Hoffer, N.V.; Coopmans, C. Fatigue crack detection using unmanned aerial systems in under-bridge inspection. Ida. Transp. Dep. 2017, 1, 1–120. [Google Scholar]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Benchmarking image processing algorithms for unmanned aerial system-assisted crack detection in concrete structures. Infrastructures 2019, 4, 19. [Google Scholar] [CrossRef] [Green Version]
- Kim, I.H.; Jeon, H.; Baek, S.C.; Hong, W.H.; Jung, H.J. Application of crack identification techniques for an aging concrete bridge inspection using an unmanned aerial vehicle. Sensors 2018, 18, 1881. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kong, X.; Li, J. Vision—Based fatigue crack detection of steel structures using video feature tracking. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 783–799. [Google Scholar] [CrossRef]
- Mstafa, R.J.; Younis, Y.M.; Hussein, H.I.; Atto, M. A new video steganography scheme based on Shi-Tomasi corner detector. IEEE Access 2020, 8, 161825–161837. [Google Scholar] [CrossRef]
- Zhu, J.; Ren, M.W.; Yang, Z.J.; Zhao, W. Fast matching algorithm based on corner detection. J. Nanjing Univ. Sci. Technol. 2011, 35, 755–758. [Google Scholar]
- Bansal, M.; Kumar, M.; Kumar, M.; Kumar, K. An efficient technique for object recognition using Shi-Tomasi corner detection algorithm. Soft Comput. 2021, 25, 4423–4432. [Google Scholar] [CrossRef]
- Mohan, A.; Poobal, S. Crack detection using image processing: A critical review and analysis. Alex. Eng. J. 2018, 57, 787–798. [Google Scholar] [CrossRef]
- Budiansky, B.; O’connell, R.J. Elastic moduli of a cracked solid. Int. J. Solids Struct. 1976, 12, 81–87. [Google Scholar] [CrossRef]
- Aboudi, J. Stiffness reduction of cracked solids. Eng. Fract. Mech. 1987, 26, 637–650. [Google Scholar] [CrossRef]
- Dhital, D.; Lee, J.R. A fully non-contact ultrasonic propagation imaging system for closed surface crack evaluation. Exp. Mech. 2012, 52, 1111–1122. [Google Scholar] [CrossRef]
- Shan, B.; Zheng, S.; Ou, J. A stereovision-based crack width detection approach for concrete surface assessment. KSCE J. Civ. Eng. 2016, 20, 803–812. [Google Scholar] [CrossRef]
- Shan, Q.; Dewhurst, R.J. Surface—Breaking fatigue crack detection using laser ultrasound. Appl. Phys. Lett. 1993, 62, 2649–2651. [Google Scholar] [CrossRef]
- Wang, P.; Huang, H. Comparison analysis on present image-based crack detection methods in concrete structures. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing (CISP2010), Yantai, China, 16–18 October 2010; Volume 5, pp. 2530–2533. [Google Scholar]
- Koch, C.; Georgieva, K.; Kasireddy, V.; Akinci, B.; Fieguth, P. A review on computer vision based defect detection and condition assessment of concrete and asphalt civil infrastructure. Adv. Eng. Inform. 2015, 29, 196–210. [Google Scholar] [CrossRef] [Green Version]
- Feng, C.; Liu, M.Y.; Kao, C.C.; Lee, T.Y. Deep active learning for civil infrastructure defect detection and classification. In Computing in Civil Engineering 2017; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2017; pp. 298–306. [Google Scholar]
- Lin, H.; Li, B.; Wang, X.; Shu, Y.; Niu, S. Automated defect inspection of LED chip using deep convolutional neural network. J. Intell. Manuf. 2019, 30, 2525–2534. [Google Scholar] [CrossRef]
- Olson, M.; Wyner, A.J.; Berk, R. Modern neural networks generalize on small data sets. In Proceedings of the 32nd International Conference on Neural Information Processing Systems 2018; Curran Associates Inc.: Red Hook, NY, USA, 2018; pp. 3623–3632. [Google Scholar]
- Huyan, J.; Li, W.; Tighe, S.; Deng, R.; Yan, S. Illumination compensation model with k-means algorithm for detection of pavement surface cracks with shadow. J. Comput. Civ. Eng. 2020, 34, 04019049. [Google Scholar] [CrossRef]
- Lei, B.; Wang, N.; Xu, P.; Song, G. New crack detection method for bridge inspection using UAV incorporating image processing. J. Aerosp. Eng. 2018, 31, 04018058. [Google Scholar] [CrossRef]
- Yoo, H.S.; Kim, Y.S. Development of a crack recognition algorithm from non-routed pavement images using artificial neural network and binary logistic regression. KSCE J. Civ. Eng. 2016, 20, 1151–1162. [Google Scholar] [CrossRef]
- Hoang, N.D.; Nguyen, Q.L.; Tran, X.L. Automatic detection of concrete spalling using piecewise linear stochastic gradient descent logistic regression and image texture analysis. Complexity 2019, 2019, 5910625. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Q.; Qu, Z.; Cao, C. Mixed pooling and richer attention feature fusion for crack detection. Pattern Recognit. Lett. 2021, 145, 96–102. [Google Scholar] [CrossRef]
- Wu, X.; Ma, J.; Sun, Y.; Zhao, C.; Basu, A. Multi-scale deep pixel distribution learning for concrete crack detection. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR) 2021, Milan, Italy, 10–15 January 2021; pp. 6577–6583. [Google Scholar]
- Sari, Y.; Prakoso, P.B.; Baskara, A.R. Road crack detection using support vector machine (SVM) and OTSU algorithm. In Proceedings of the 2019 6th International Conference on Electric Vehicular Technology (ICEVT) 2019, Ungasan, Indonesia, 18–21 November 2019; pp. 349–354. [Google Scholar]
- Hasni, H.; Alavi, A.H.; Jiao, P.; Lajnef, N. Detection of fatigue cracking in steel bridge girders: A support vector machine approach. Arch. Civ. Mech. Eng. 2017, 17, 609–622. [Google Scholar] [CrossRef]
- Han, T.; Jiang, D.; Zhao, Q.; Wang, L.; Yin, K. Comparison of random forest, artificial neural networks and support vector machine for intelligent diagnosis of rotating machinery. Trans. Inst. Meas. Control. 2018, 40, 2681–2693. [Google Scholar] [CrossRef]
- Sharma, M.; Anotaipaiboon, W.; Chaiyasarn, K. Concrete crack detection using the integration of convolutional neural network and support vector machine. Sci. Technol. Asia 2018, 23, 19–28. [Google Scholar]
- Noshad, Z.; Javaid, N.; Saba, T.; Wadud, Z.; Saleem, M.Q.; Alzahrani, M.E.; Sheta, O.E. Fault detection in wireless sensor networks through the random forest classifier. Sensors 2019, 19, 1568. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saravanan, N.; Siddabattuni, V.K.; Ramachandran, K.I. Fault diagnosis of spur bevel gear box using artificial neural network (ANN), and proximal support vector machine (PSVM). Appl. Soft Comput. 2010, 10, 344–360. [Google Scholar] [CrossRef]
- Kankar, P.K.; Sharma, S.C.; Harsha, S.P. Vibration-based fault diagnosis of a rotor bearing system using artificial neural network and support vector machine. Int. J. Model. Identif. Control. 2012, 15, 185–198. [Google Scholar] [CrossRef]
- Hoang, N.D. An artificial intelligence method for asphalt pavement pothole detection using least squares support vector machine and neural network with steerable filter-based feature extraction. Adv. Civ. Eng. 2018, 2018, 7419058. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.S.; He, Z.C. Crack detection of arch dam using statistical neural network based on the reductions of natural frequencies. J. Sound Vib. 2007, 302, 1037–1047. [Google Scholar] [CrossRef]
- Fan, R.; Bocus, M.J.; Zhu, Y.; Jiao, J.; Wang, L.; Ma, F.; Liu, M. Road crack detection using deep convolutional neural network and adaptive thresholding. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV) 2019, Paris, France, 9–12 June 2019; pp. 474–479. [Google Scholar]
- Scholar, P.G. Review and analysis of crack detection and classification techniques based on crack types. Int. J. Appl. Eng. Res. 2018, 13, 6056–6062. [Google Scholar]
- Palermo, F.; Konstantinova, J.; Althoefer, K.; Poslad, S.; Farkhatdinov, I. Implementing tactile and proximity sensing for crack detection. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA) 2020, Paris, France, 31 May–31 August 2020; pp. 632–637. [Google Scholar]
- Luo, Q.; Ge, B.; Tian, Q. A fast adaptive crack detection algorithm based on a double-edge extraction operator of FSM. Constr. Build. Mater. 2019, 204, 244–254. [Google Scholar] [CrossRef]
- Sheng, P.; Chen, L.; Tian, J. Learning-based road crack detection using gradient boost decision tree. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA) 2018, Wuhan, China, 31 May–2 June 2018; pp. 1228–1232. [Google Scholar]
- Bhat, S.; Naik, S.; Gaonkar, M.; Sawant, P.; Aswale, S.; Shetgaonkar, P. A survey on road crack detection techniques. In Proceedings of the 2020 International Conference on Emerging Trends in Information Technology and Engineering (Ic-ETITE) 2020, Vellore, India, 24–25 February 2020; pp. 1–6. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Features | Domain | Image Details | Imaging Device/Source | Results | Limitations | Ref. |
|---|---|---|---|---|---|---|---|
| Recursive Tree edge pruning | Crack Detection | Pavement | 206 images 800 × 600 | - | Precision = 0.79 Recall = 0.92 F-Measure = 0.85 | Increased runtime (up to 30 s) | [4] |
| GP and Image Filtering | Crack Detection | Concrete | 17 (varying resolution) | Digital Camera | Accuracy = 80% | - | [10] |
| Gabor Filter | Crack Detection | Pavement | 5 336 × 339 pixels | Canon IXUS 80 IS | Precision up to 95% | Results presented on 5 images only | [13] |
| Particle Filter | Crack Detection & Measurement | Civil Structures | 14 12 MP | IP Camera | Error Range = 7.51–8.59% | - | [14] |
| Beamlet Transform | Crack Detection, measurement & Classification | Pavement | 256 × 256 pixels | - | A method is fast & robust to noise | Cant calculate crack width; manual setting of thresholds prevents full automation | [18] |
| Median filter, Hessian Matrix, probabilistic relaxation | Crack detection | Noisy Concrete Surfaces | 60 images 640 × 480 pixels | SONY Cyber-shot DSC-F828 | AUC = 0.9903 | - | [21] |
| FPHBN | Crack Detection | Pavement | 500 + 1969 + 206 + 118 + 38 (varying resolution) | Crack500, GAPs384, CrackTree200, CFD, Aigle-RN | AIU = 0.081 Time = 0.241 s/image | Method is not real time | [22] |
| Canny edge detector, dilate operators, Frangi filter | Crack Detection | Bridges | 72 images 4288 × 2848 resolution | UAV | Detection rate = 98.7% | - | [23] |
| UAS Operator | Crack Detection and measurement | Bridges | Real-time crack detection | DJI Mavic Pro | DJI Mavic Pro most suitable camera to visualize cracks | UAS not stable in the absence of GPS and windy atmosphere | [24] |
| Shi-Tomasi feature point detection | Crack Detection | Bridges | Real-time crack detection | consumer-grade digital camera | The system is robust to varying illumination conditions and complex textures | Accuracy affected by noise-limited camera resolution | [25] |
| Method | Features | Domain | Dataset | Device/Source | Results | Limitations | Ref. |
|---|---|---|---|---|---|---|---|
| GoogleNet CNN, FPN | Crack delineation | Civil Structures | 64000 crack & 64000 non-crack images | Canon Camera | Precision = 80.13% Recall = 86.09% F-Measure = 81.55% | Need 16 s to find cracks on an image of 6000 × 4000 pixels | [40] |
| CNN | Defect detection | Calf Leather | 584 images 400 × 400 pixels | Robotic Arm | Accuracy = 91.5% (training), 70.35% (testing) | - | [41] |
| CNN | Crack detection | Pavement | 500 images 3264 × 2448 | Smartphone sensor | Precision = 0.8696 Recall = 0.9251 F-Measure = 0.8965 | - | [42] |
| FCN | Crack Detection and density evaluation | Concrete | 20,000 crack & 20,000 non crack 227 × 227 | Public Dataset | AP = 89.3% F-Measure = 89.3% | Reduced performance for crack density evaluation in the presence of noise | [43] |
| K-means clustering, Gaussian Models | Crack detection, measurement and Characterization and severity assessment | Road | 84 images 1536 × 2048 pixels | Digital Camera | F-Measure = 97% | Less accuracy in detection of narrow cracks (<2 mm) | [44] |
| STRUM, SVM, Adaboost, Random Forest | Crack Detection and density evaluation | Bridge | 100 images 1920 × 1280 pixels | Robotic Scanning | Accuracy = 95% | - | [45] |
| SVM, MDNMS | Crack Detection | Road | 7250 images 4000 × 1000 pixels | Line scan cameras, laser and HW-SW | Precision = 98.29% Recall = 93.86% | - | [46] |
| CNN | Crack Detection | Pavement | 260 training images 512 × 512 pixels | CrackTree, CRKWH100, CrackLS315, Stone331 | F-Measure = 0.87 | Does not work well for cracks on stone images | [47] |
| CNN | Crack Detection | Pavement | 500 3264 × 2448 pixels | Smartphones | Accuracy = 91.3% | Results subject to location variance | [48] |
| FCN | Crack Detection & Measurement | Pavement & Walls | 800 (varying resolution) | Digital Camera | Accuracy = 97.96% | - | [49] |
| Random Structured Forests, SVM | Crack Detection & Characterization | Road | 38 + 118 images 480 × 320 pixels | CDN, AigleRN Datasets | Precision = 96.73% | Crack width not measured; Not tested on videos | [50] |
| MorphLink C, ANN | Crack Detection & Characterization | Road | 100 0.99 mm per pixel | LRIS | MSE = 0.0094–0.0105 | - | [51] |
| NB-CNN | Crack Detection | Nuclear Power Plant Components | 147344 crack, 149460 non-crack 120 × 120 pixels | 20 captured videos 720 × 540 pixels | Average AUC= 96.8% | To avoid overfitting a large number of training images required; Reliance on GPU | [52] |
| Morphologic Image Processing, Logistic Regression | Crack Detection | Steel Slabs | 644 + 323 images 0.1 × 0.1 × 0.0053 mm (width length depth) resolution | 3D Profile Data | Accuracy above 80% | - | [53] |
| Transfer Learning (CNN) | Crack & Sealed Crack Detection | Pavement | 800 images 2000 × 4000 pixels | ImageNet Dataset | recall= 0.951; precision= 0.847 | - | [54] |
| Canny Algorithm, decision tree heuristic | Crack Detection & classification | Pavement | 400 images 320 × 320 pixels | Digital Camera | Success rate= 88% for crack detection 80% for crack classification | Not tested in real-time | [55] |
| Morphological analysis, segmentation, extreme learning machine classifier | Crack Detection & Classification | Subway Tunnels | 38000 images 6144 × 1024 | CMOS line scan cameras | Accuracy > 90% | Parameters setting need to be done for images of different resolutions | [56] |
| CNN | Crack Detection | Pavement | 2000 3D images 1 mm resolution | Image Library of 5000 3D images | Precision (90.13%), Recall (87.63%) and F-measure (88.86%) | Reduced accuracy in finding hairline cracks | [57] |
| Morphological operations, NN, SVM | Crack Detection, depth perception | Civil Structures | 1910 non- crack, 3961 crack images 5184 × 3456 pixels. | Canon EOS 7D | NN: Accuracy = 79.5% SVM: Accuracy = 78.3% | - | [58] |
| Deep convolutional encoder-decoder network | Crack Detection | Road | 527 images | Black-box Camera | Recall = 71.98% Precision = 77.68% Intersection of Union = 59.65% | - | [59] |
| Crack Types | Ref. |
|---|---|
| Longitudinal cracks, transversal cracks or miscellaneous. | [6] |
| Types based on dimensions | [15] |
| Crack, sealed crack | [20] |
| Transverse cracks, longitudinal cracks and alligator cracks. | [23] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munawar, H.S.; Hammad, A.W.A.; Haddad, A.; Soares, C.A.P.; Waller, S.T. Image-Based Crack Detection Methods: A Review. Infrastructures 2021, 6, 115. https://doi.org/10.3390/infrastructures6080115
Munawar HS, Hammad AWA, Haddad A, Soares CAP, Waller ST. Image-Based Crack Detection Methods: A Review. Infrastructures. 2021; 6(8):115. https://doi.org/10.3390/infrastructures6080115
Chicago/Turabian StyleMunawar, Hafiz Suliman, Ahmed W. A. Hammad, Assed Haddad, Carlos Alberto Pereira Soares, and S. Travis Waller. 2021. "Image-Based Crack Detection Methods: A Review" Infrastructures 6, no. 8: 115. https://doi.org/10.3390/infrastructures6080115
APA StyleMunawar, H. S., Hammad, A. W. A., Haddad, A., Soares, C. A. P., & Waller, S. T. (2021). Image-Based Crack Detection Methods: A Review. Infrastructures, 6(8), 115. https://doi.org/10.3390/infrastructures6080115