
Optimization and Design of a Flexible Droop-Nose Leading-Edge Morphing Wing Based on a Novel Black Widow Optimization Algorithm—Part I



Abstract
:1. Introduction
2. Bibliographical Review
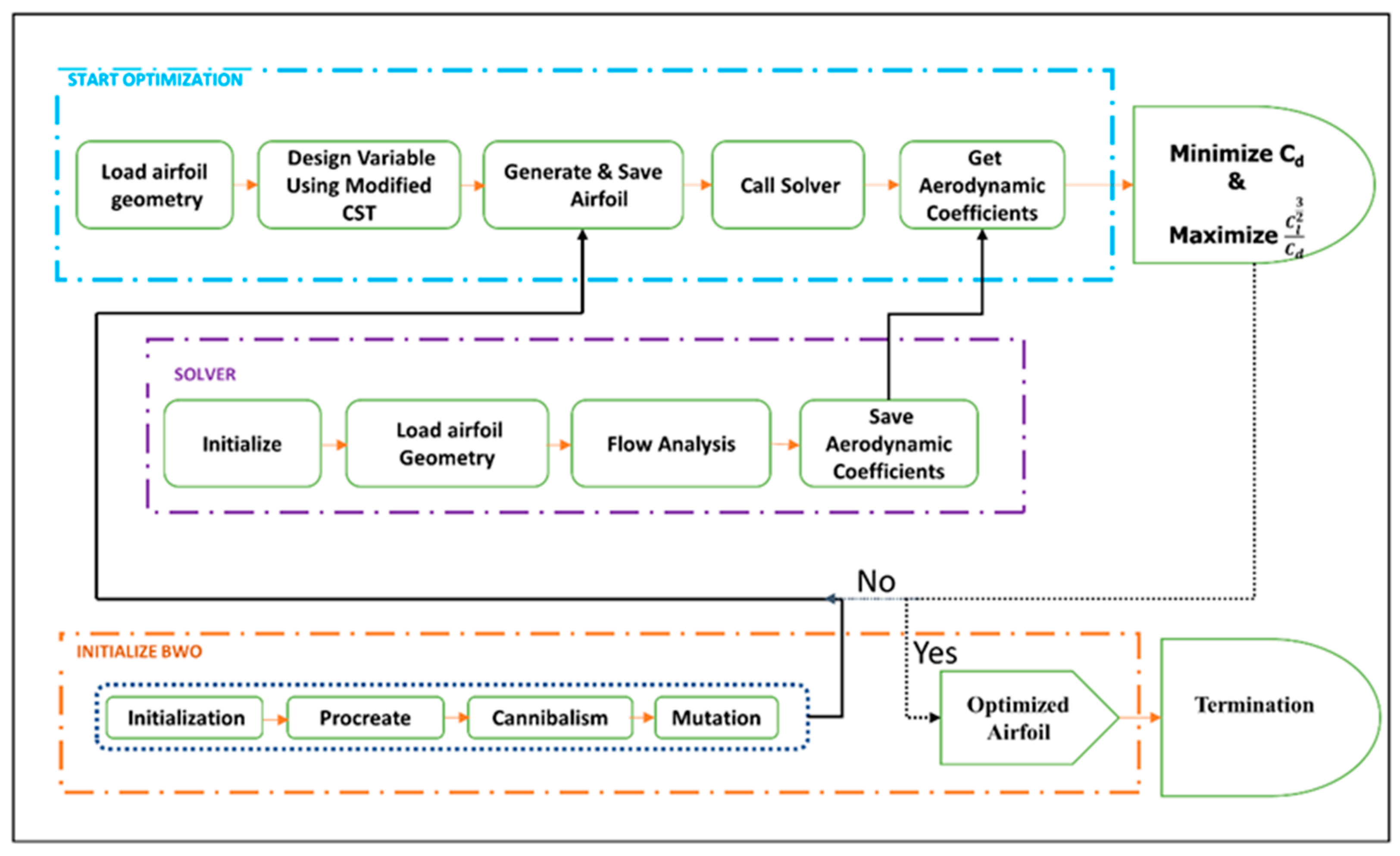
3. Optimization Framework Methodology
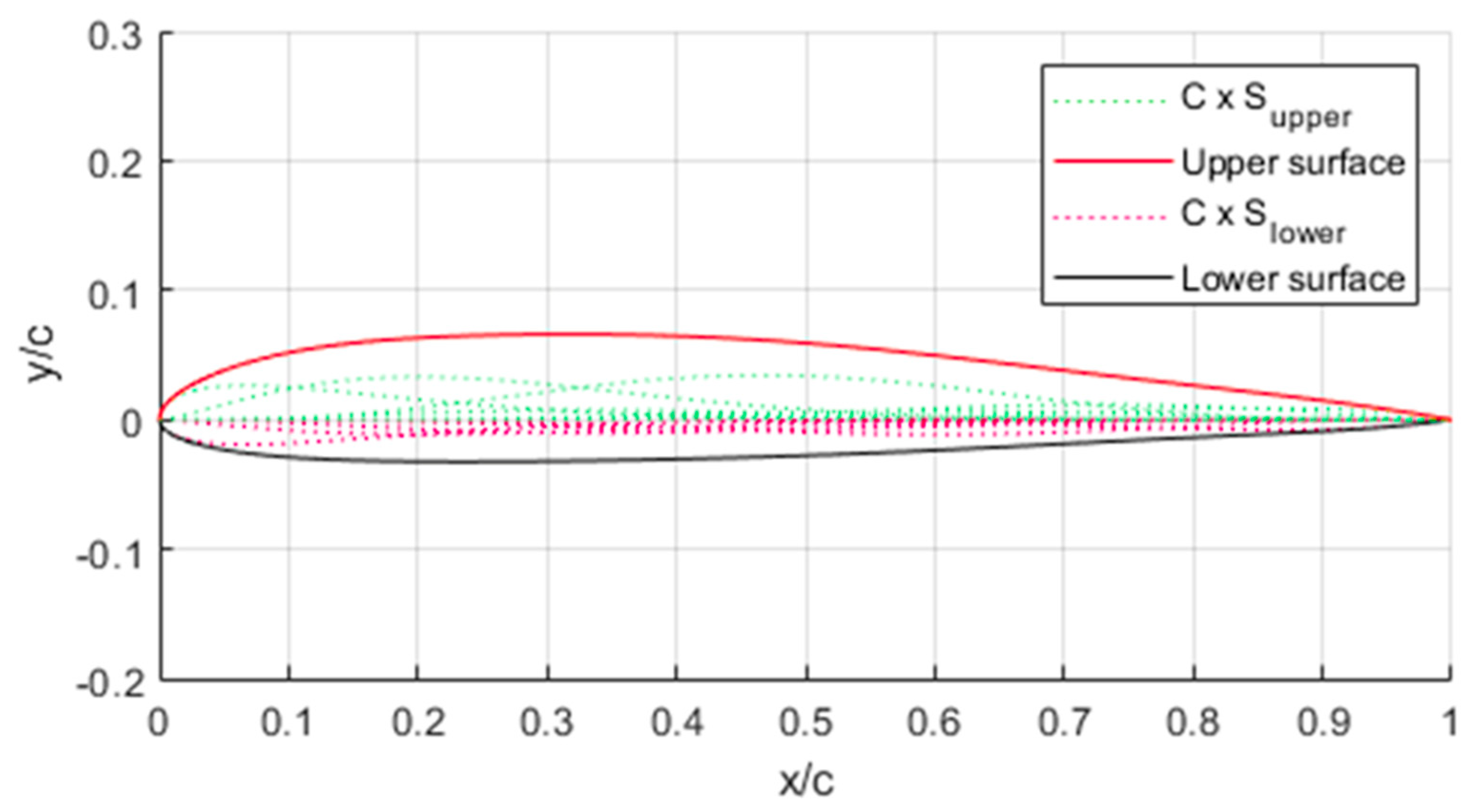
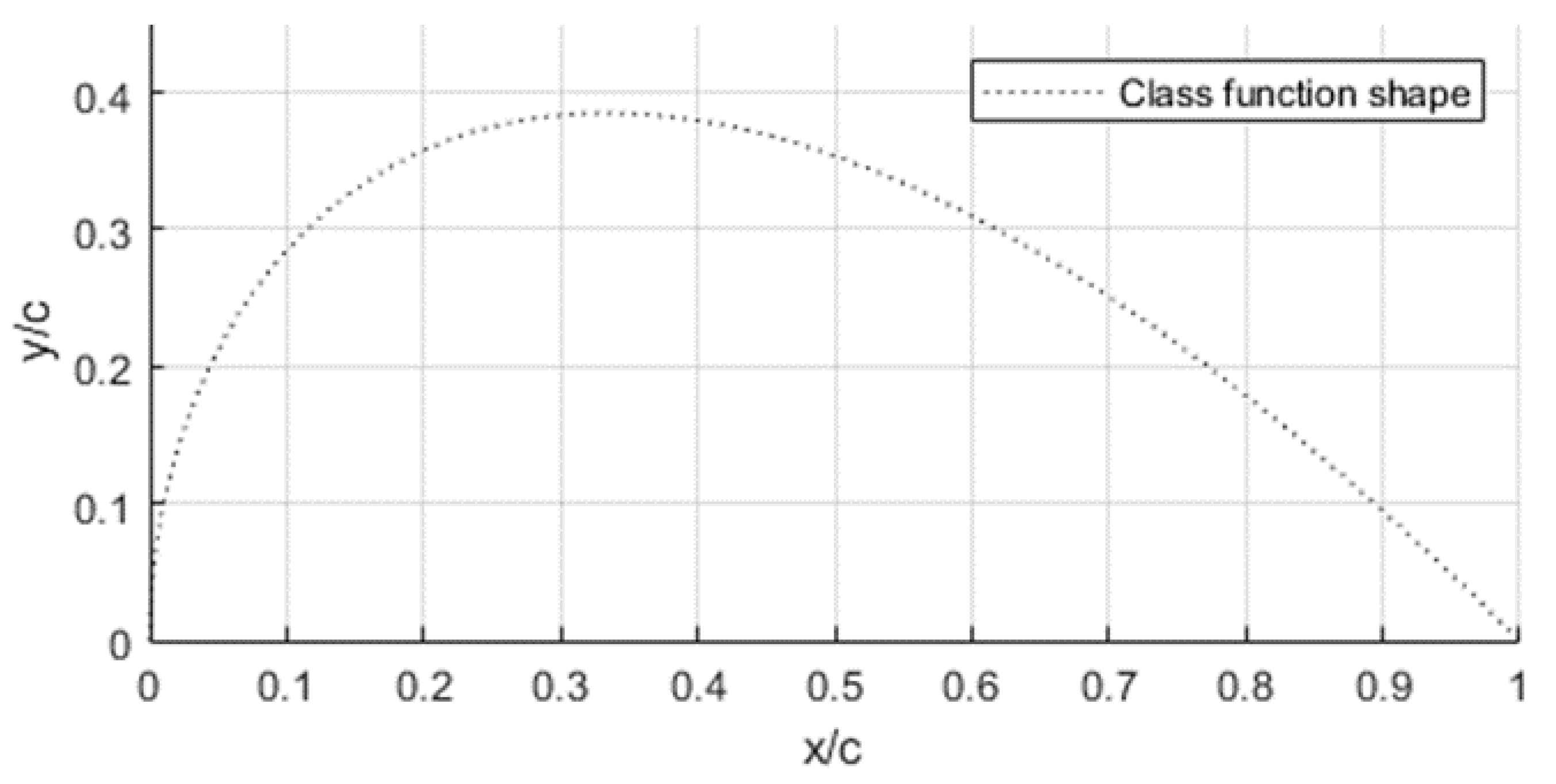
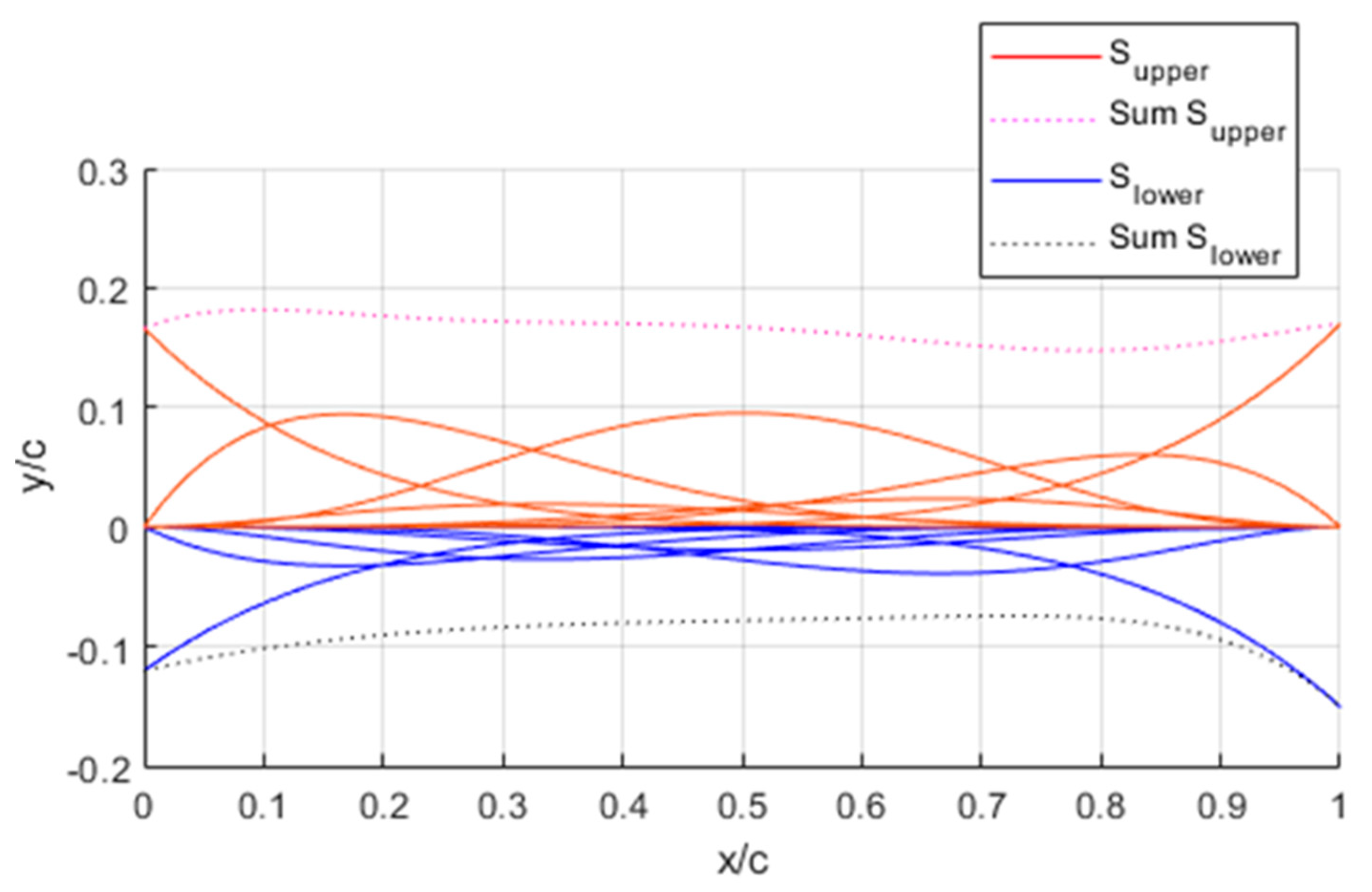
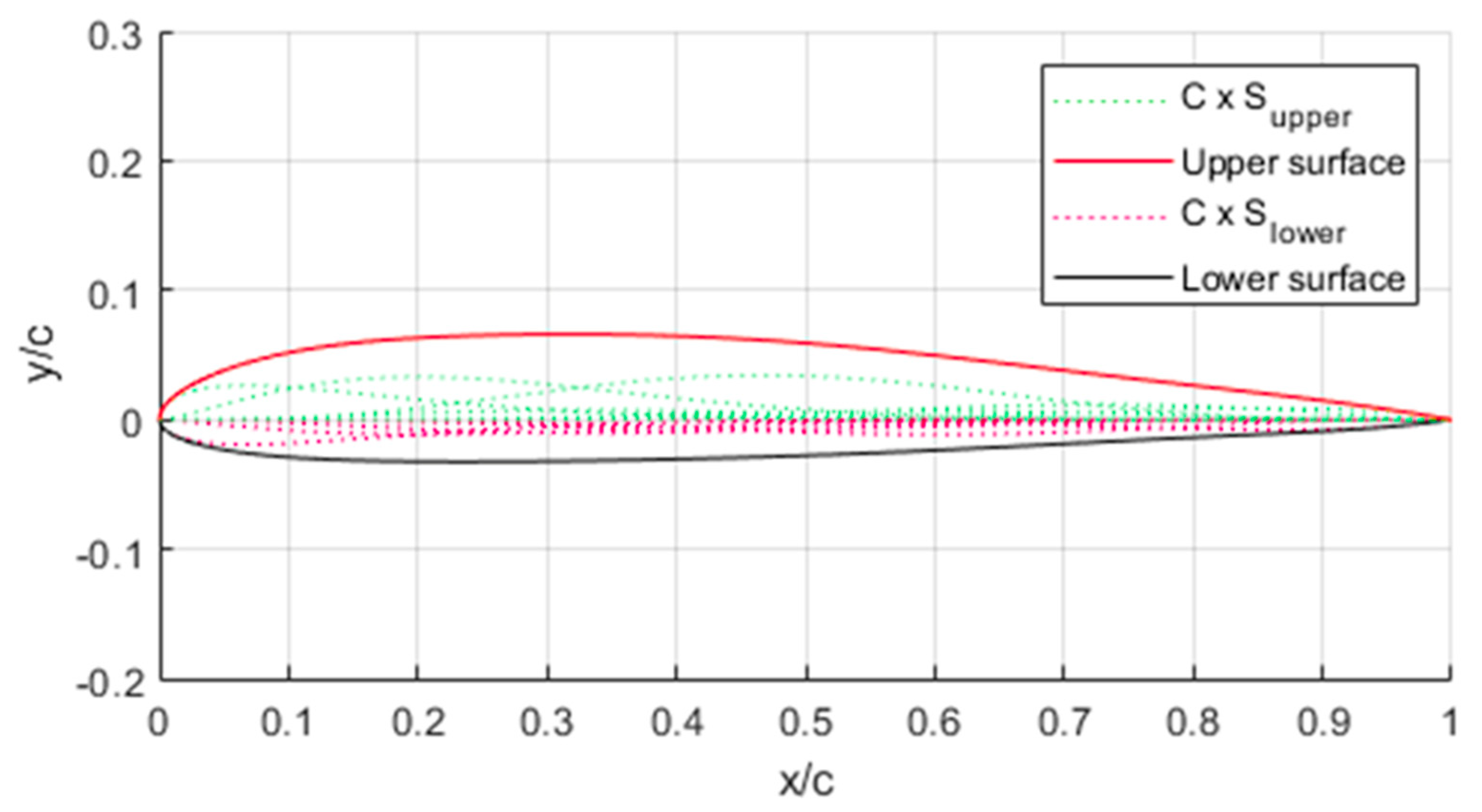
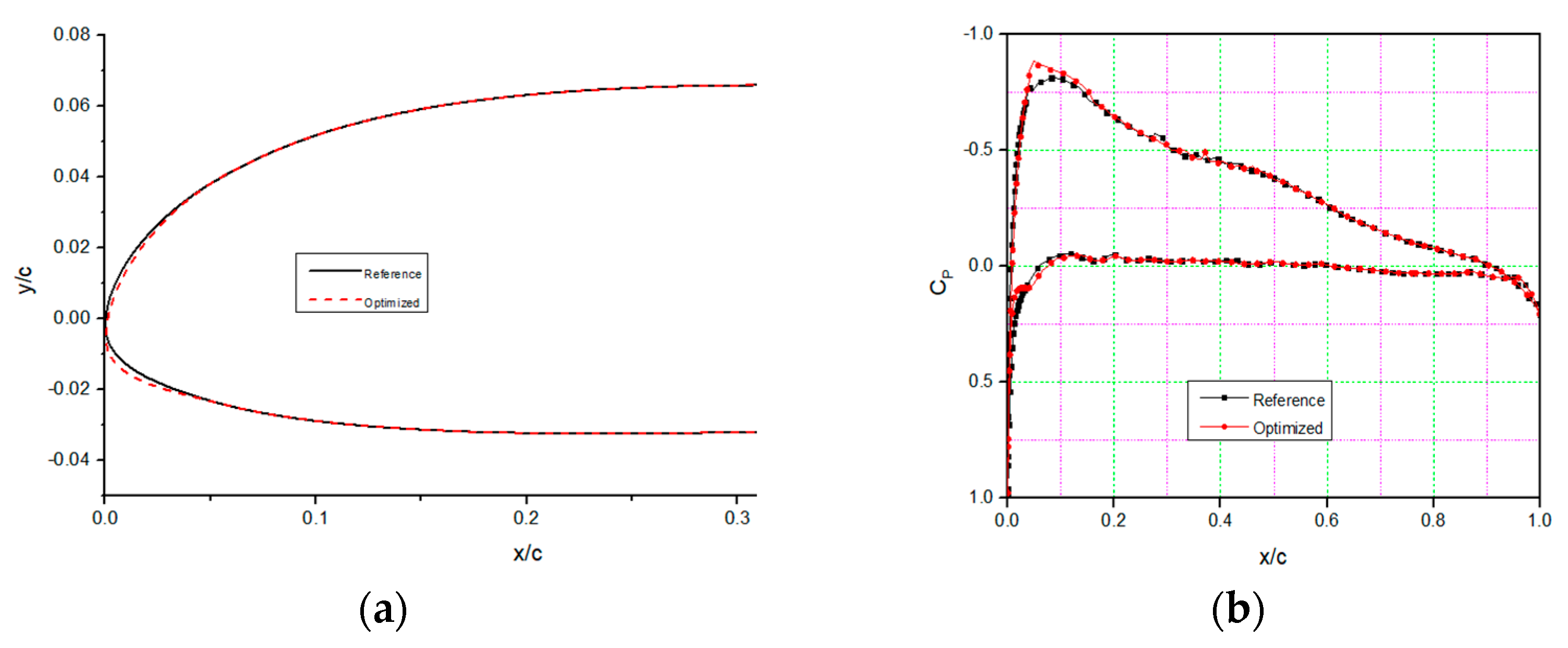
3.1. CST Airfoil Parameterization
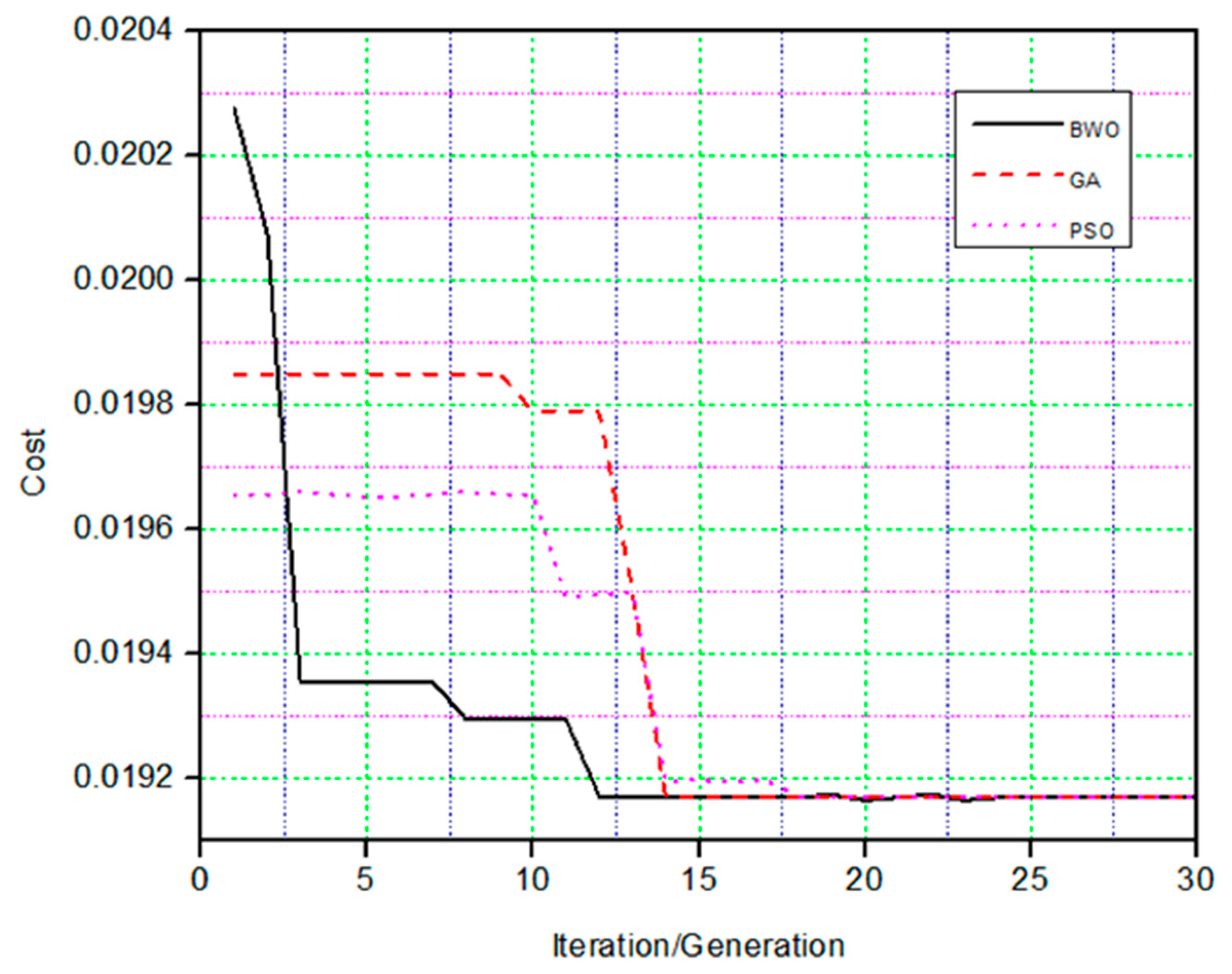
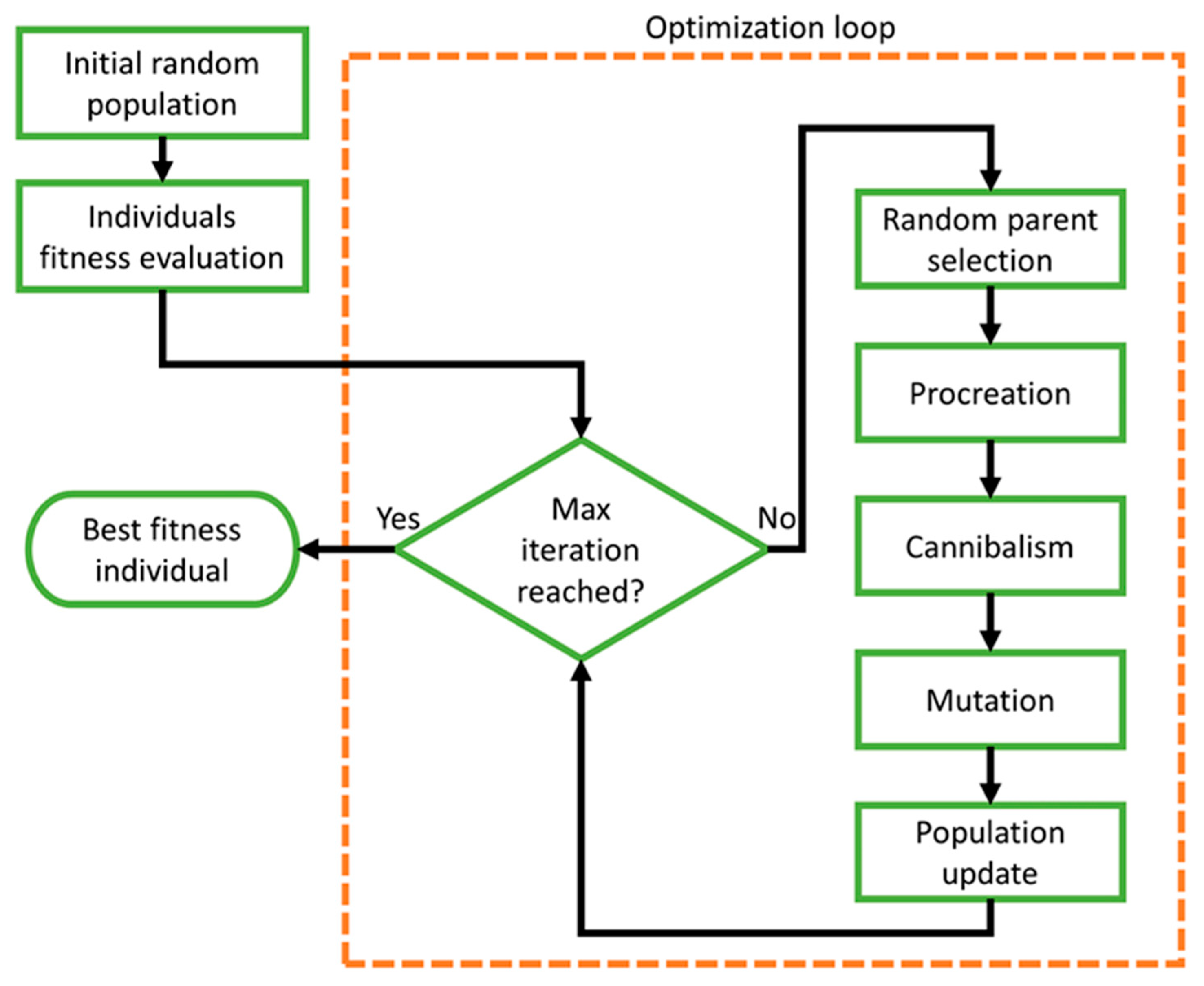
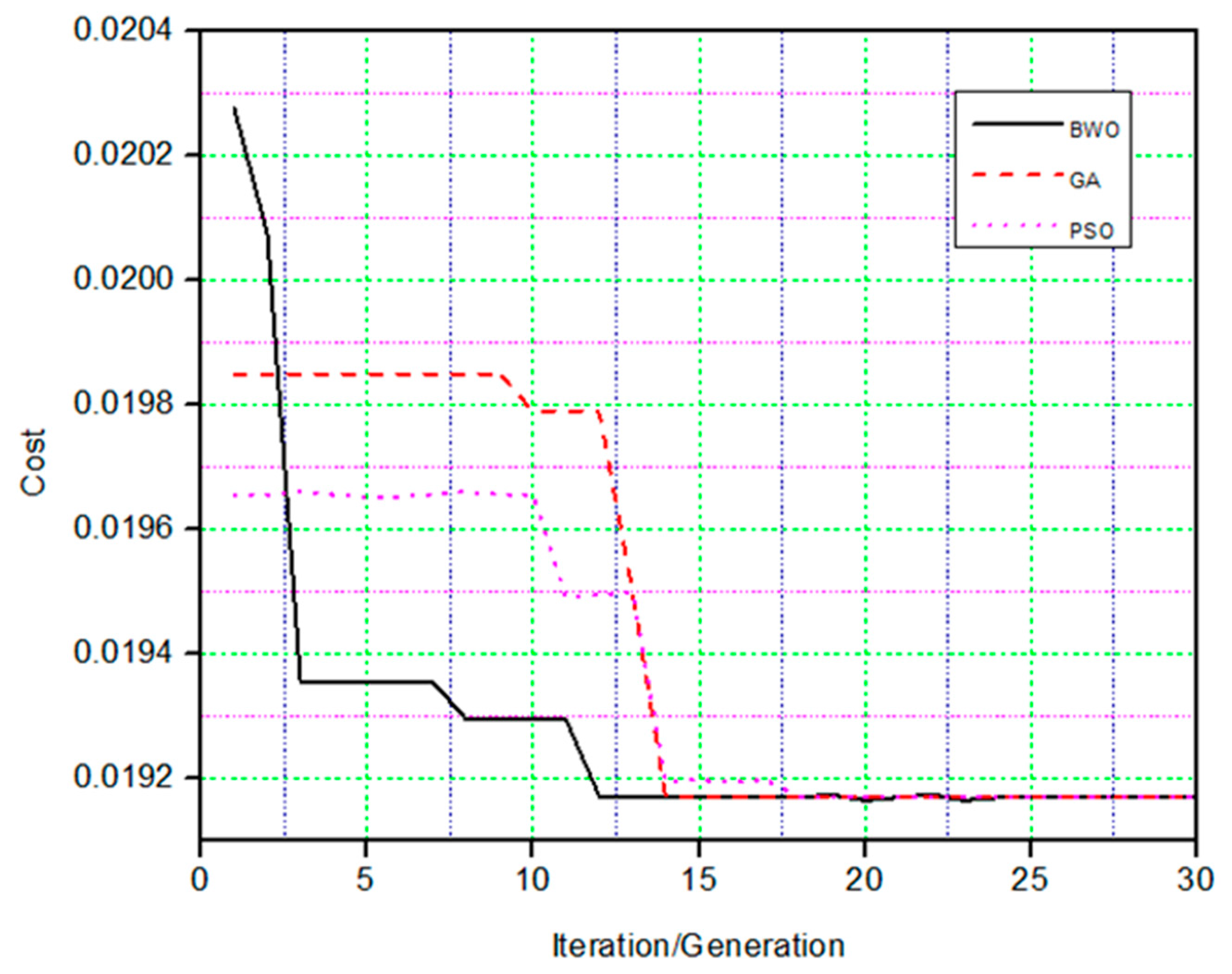
3.2. Black Widow Optimization (BWO)
3.3. Aerodynamic Solver
3.3.1. XFoil Solver
3.3.2. Transition SST Model
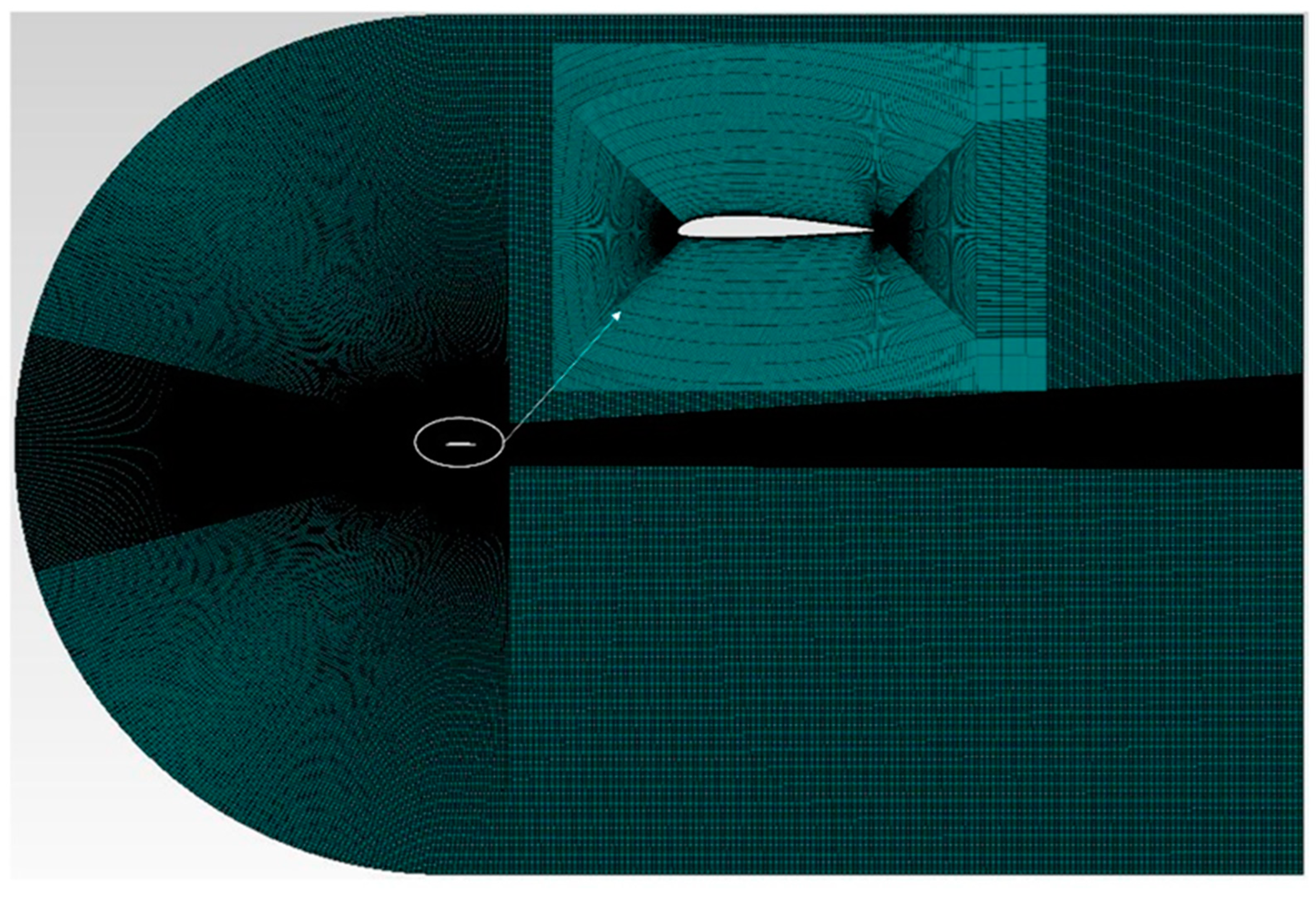
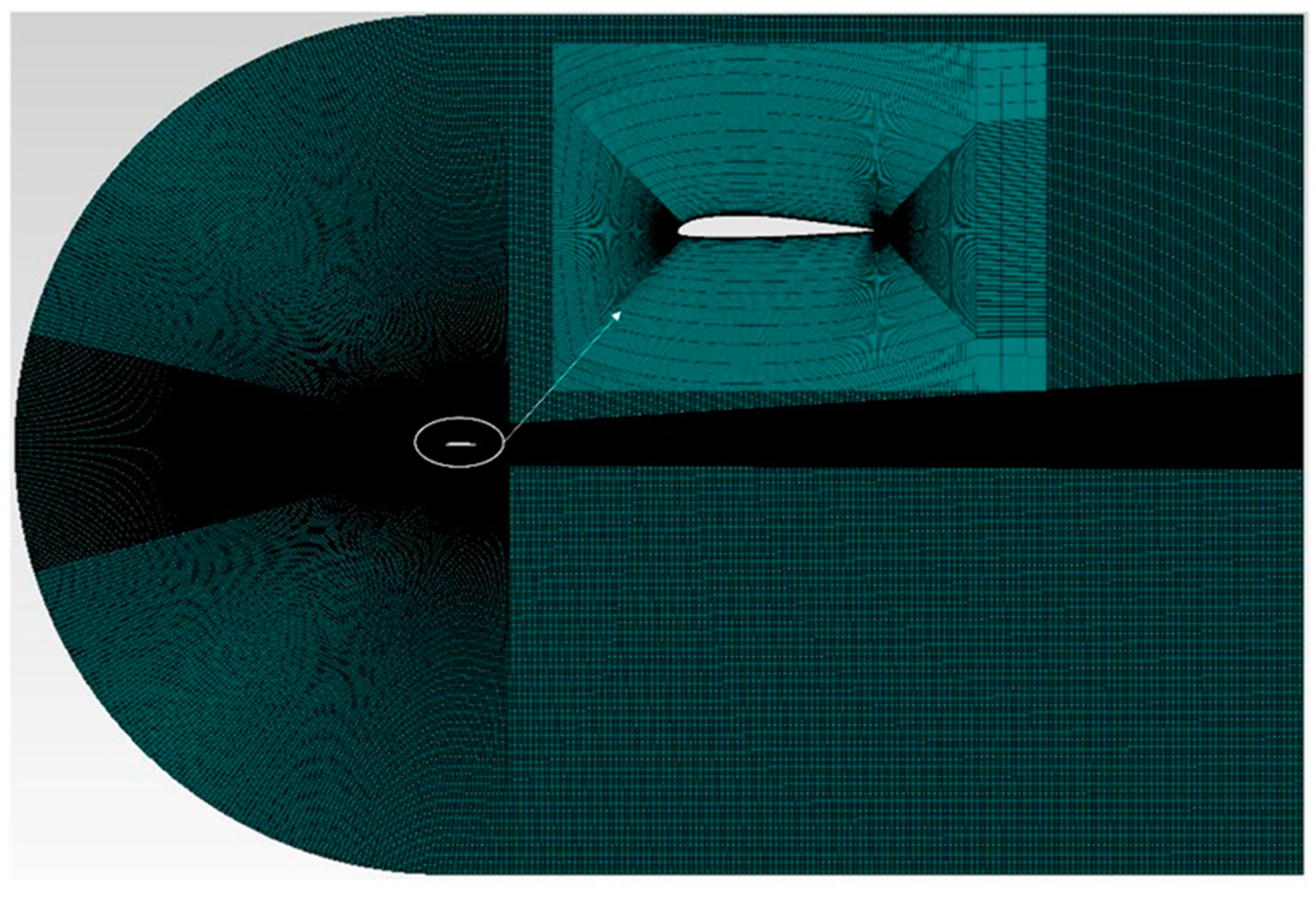
3.3.3. Mesh Generation
4. Results and Discussion
4.1. Optimization of Cruise Phase
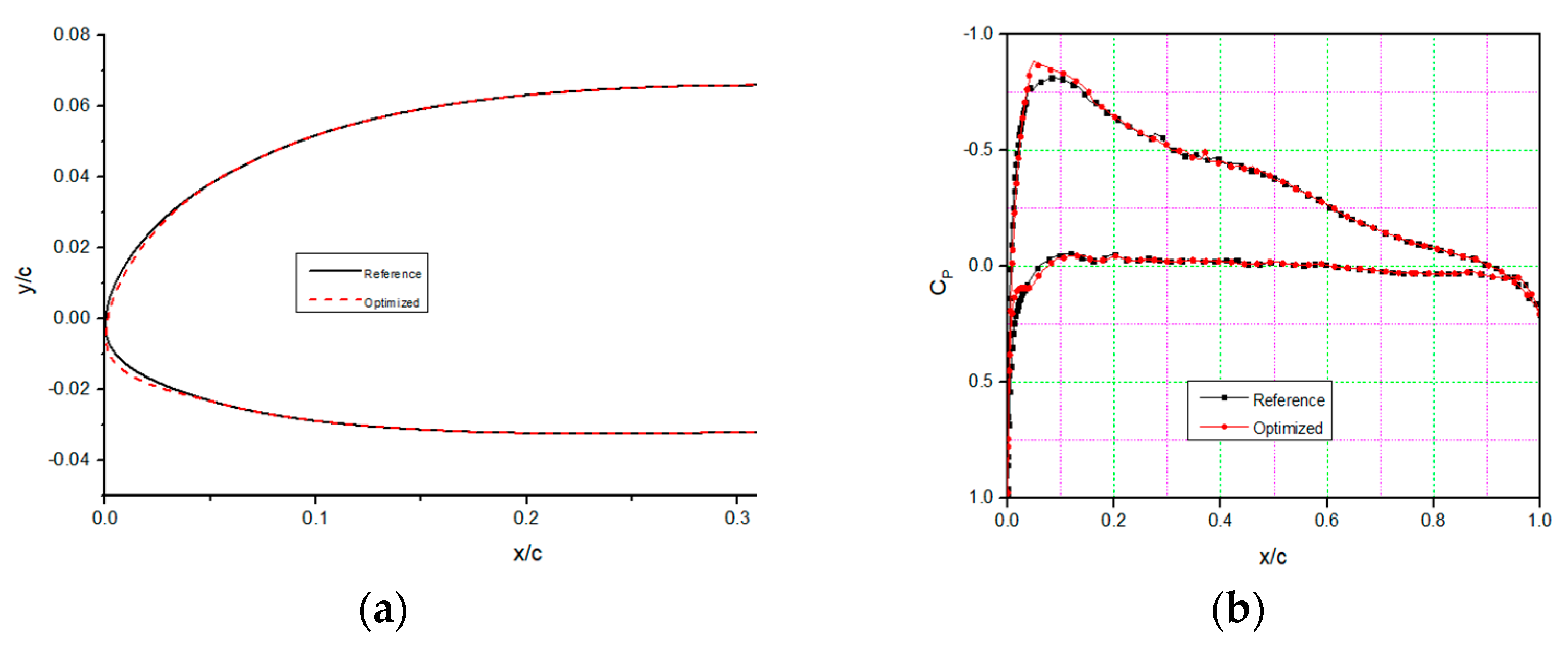
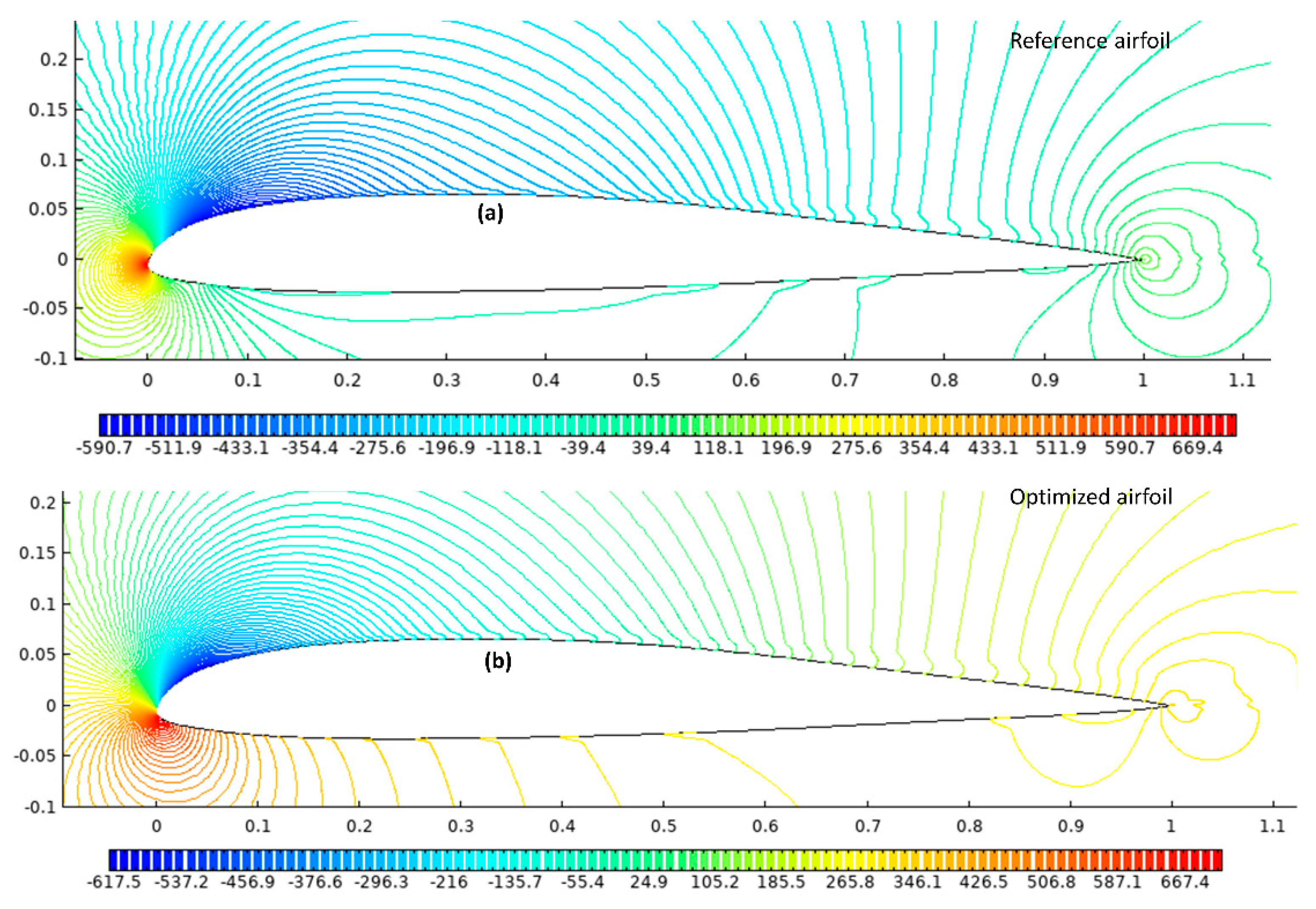
4.1.1. Drag Minimization
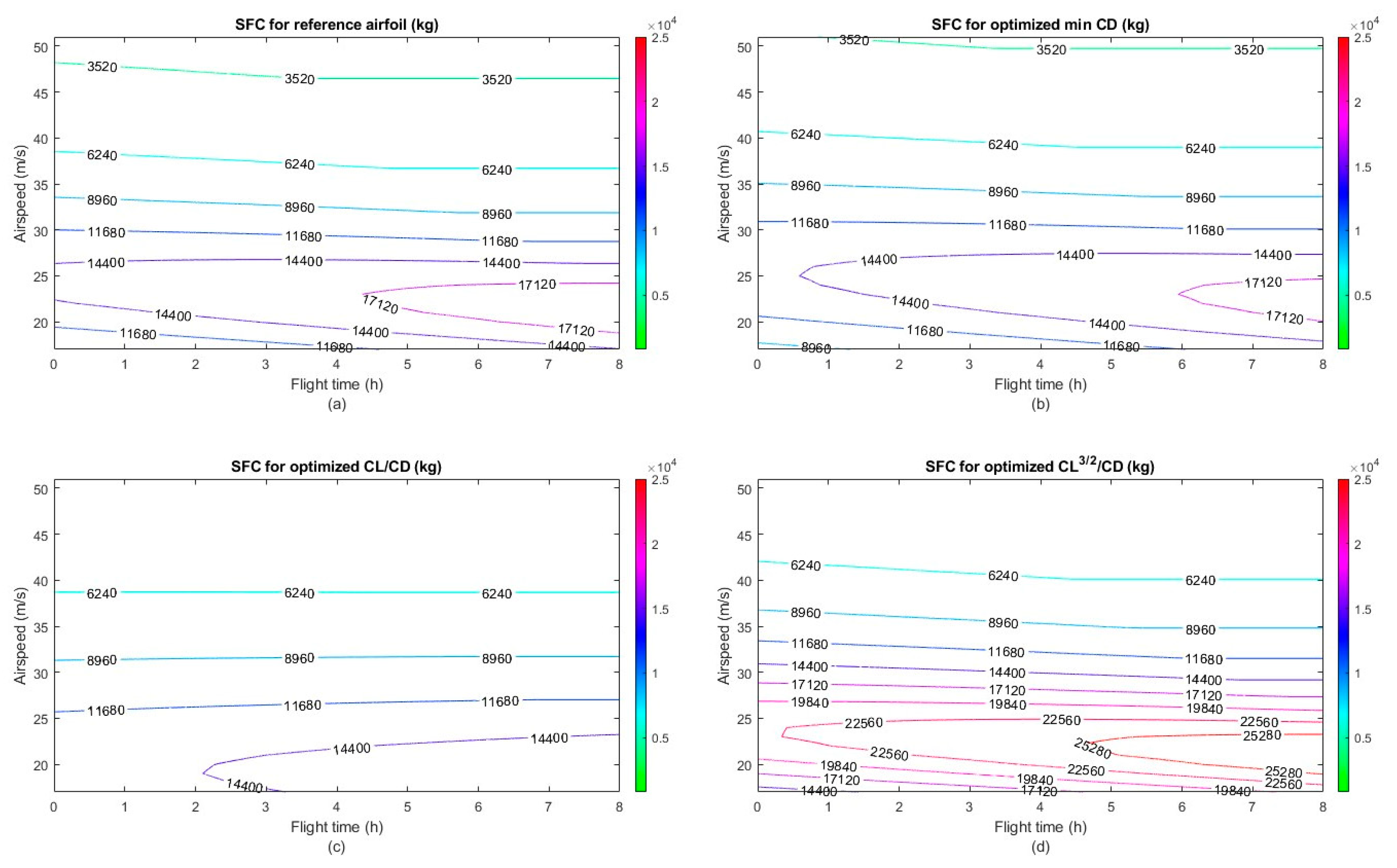
4.1.2. Endurance Maximization
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Lift force per unit span | |
| CST class function | |
| Drag force per unit span | |
| Lift coefficient | |
| Drag coefficient | |
| Chord | |
| Specific fuel consumption | |
| Skin friction coefficient | |
| Drag force | |
| Endurance | |
| Aerodynamic Endurance Efficiency | |
| Binomial coefficient K | |
| Lift force | |
| Mach number | |
| Wing surface | |
| Aircraft speed | |
| Translation variable in for the upper surface | |
| Translation variable in for the lower surface | |
| Air density | |
| Θ | Morphing deflection angle |
References
- Overton, J. Fact Sheet|The Growth in Greenhouse Gas Emissions from Commercial Aviation, Part 1 of a Series on Airlines and Climate Change. 2019. Available online: https://www.eesi.org/papers/view/fact-sheet-the-growth-in-greenhouse-gas-emissions-from-commercial-aviation (accessed on 22 December 2021).
- Botez, R. Morphing wing, UAV and aircraft multidisciplinary studies at the Laboratory of Applied Research in Active Controls, Avionics and AeroServoElasticity LARCASE. Aerosp. Lab 2018, 1–11. [Google Scholar] [CrossRef]
- Hamy, A.; Murrieta-Mendoza, A.; Botez, R. Flight Trajectory Optimization to Reduce Fuel Burn and Polluting Emissions Using a Performance Database and Ant Colony Optimization Algorithm; AEGATS ‘16 Advanced Aircraft Efficiency in a Global Air Transport System: Paris, France, 2016. [Google Scholar]
- Patrón, R.S.F.; Berrou, Y.; Botez, R. Climb, cruise and descent 3D trajectory optimization algorithm for a flight management system. In Proceedings of the AIAA/3AF Aircraft Noise and Emissions Reduction Symposium, Atlanta, GA, USA, 16–20 June 2014; p. 3018. [Google Scholar]
- Bashir, M.; Longtin-Martel, S.; Botez, R.M.; Wong, T. Aerodynamic Design Optimization of a Morphing Leading Edge and Trailing Edge Airfoil-Application on the UAS-S45. Appl. Sci. 2021, 11, 1664. [Google Scholar] [CrossRef]
- Khan, S.; Grigorie, T.; Botez, R.; Mamou, M.; Mébarki, Y. Novel morphing wing actuator control-based Particle Swarm Optimisation. Aeronaut. J. 2020, 124, 55–75. [Google Scholar] [CrossRef]
- Dancila, B.; Botez, R.; Labour, D. Altitude optimization algorithm for cruise, constant speed and level flight segments. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4772. [Google Scholar]
- Wölcken, P.C.; Papadopoulos, M. Smart intelligent aircraft structures (SARISTU). In Proceedings of the Final Project Conference; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Noviello, M.C.; Dimino, I.; Amoroso, F.; Pecora, R. Aeroelastic Assessments and Functional Hazard Analysis of a Regional Aircraft Equipped with Morphing Winglets. Aerospace 2019, 6, 104. [Google Scholar] [CrossRef] [Green Version]
- Dimino, I.; Pecora, R.; Arena, M. Aircraft morphing systems: Elasticity of selected components and modelling issues. In Proceedings of the Active and Passive Smart Structures and Integrated Systems IX, Online. 22 April–9 May 2020; p. 113760M. Available online: https://www.researchgate.net/publication/341504684_Aircraft_morphing_systems_elasticity_of_selected_components_and_modelling_issues (accessed on 22 December 2021).
- Ameduri, S.; Concilio, A. Morphing wings review aims, challenges, and current open issues of a technology. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020. [Google Scholar] [CrossRef]
- Botez, R.M.; Molaret, P.; Laurendeau, E. Laminar flow control on a research wing project presentation covering a three-year period. In Proceedings of the 2007 Canadian Aeronautics and Space Institute Annual General Meeting, Toronto, ON, Canada, 24–27 April 2007; 2007. Available online: https://www.researchgate.net/profile/Ruxandra-Botez/publication/270396714_Laminar_Flow_Control_on_a_Research_Wing_-_Project_Presentation_on_a_Three-Year_Period/links/54aa09440cf2eecc56e6c989/Laminar-Flow-Control-on-a-Research-Wing-Project-Presentation-on-a-Three-Year-Period.pdf (accessed on 22 December 2021).
- Communier, D.; Botez, R.M.; Wong, T. Design and Validation of a New Morphing Camber System by Testing in the Price-Païdoussis Subsonic Wind Tunnel. Aerospace 2020, 7, 23. [Google Scholar] [CrossRef] [Green Version]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A review of morphing aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Sugar-Gabor, O.; Koreanschi, A.; Botez, R.M.; Mamou, M.; Mebarki, Y. Analysis of the aerodynamic performance of a morphing wing-tip demonstrator using a novel nonlinear vortex lattice method. In Proceedings of the 34th AIAA Applied Aerodynamics Conference, Washington, DC, USA, 13–17 June 2016; p. 4036. [Google Scholar]
- Marino, M.; Sabatini, R. Advanced lightweight aircraft design configurations for green operations. In Proceedings of the Practical Responses to Climate Change Conference, Melbourne, Australia, 29 September–1 October 2014; p. 207. [Google Scholar]
- Eguea, J.P.; da Silva, G.P.G.; Catalano, F.M. Fuel efficiency improvement on a business jet using a camber morphing winglet concept. Aerosp. Sci. Technol. 2020, 96, 105542. [Google Scholar] [CrossRef]
- Pecora, R. Morphing wing flaps for large civil aircraft: Evolution of a smart technology across the Clean Sky program. Chin. J. Aeronaut. 2021, 34, 13–28. [Google Scholar] [CrossRef]
- Sodja, J.; Martinez, M.J.; Simpson, J.C.; De Breuker, R. Experimental evaluation of a morphing leading-edge concept. J. Intell. Mater. Syst. Struct. 2019, 30, 2953–2969. [Google Scholar] [CrossRef] [Green Version]
- Fereidooni, A.; Marchwica, J.; Leung, N.; Mangione, J.; Wickramasinghe, V. Development of a hybrid (rigid-flexible) morphing leading edge equipped with bending and extending capabilities. J. Intell. Mater. Syst. Struct. 2021, 32, 1024–1037. [Google Scholar] [CrossRef]
- May, M.; Arnold-Keifer, S.; Landersheim, V.; Laveuve, D.; Asins, C.C.; Imbert, M. Bird strike resistance of a CFRP morphing leading edge. Compos. Part C Open Access 2021, 4, 100115. [Google Scholar] [CrossRef]
- Peter, F.; Lammering, T.; Risse, K.; Franz, K.; Stumpf, E. Economic assessment of morphing leading-edge systems in conceptual aircraft design. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013; p. 145. [Google Scholar]
- Burnazzi, M.; Radespiel, R. Assessment of leading-edge devices for stall delay on an airfoil with active circulation control. CEAS Aeronaut. J. 2014, 5, 359–385. [Google Scholar] [CrossRef]
- Kintscher, M.; Wiedemann, M.; Monner, H.P.; Heintze, O.; Kühn, T. Design of a smart leading-edge device for low speed wind tunnel tests in the European project SADE. Int. J. Struct. Integr. 2011, 2. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Zhang, D. Control strategies for aircraft airframe noise reduction. Chin. J. Aeronaut. 2013, 26, 249–260. [Google Scholar] [CrossRef] [Green Version]
- Moens, F. Augmented aircraft performance with the use of morphing technology for a turboprop regional aircraft wing. Biomimetics 2019, 4, 64. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Zhigang, W.; Shuaishuai, L. Comparative study of two lay-up sequence dispositions for flexible skin design of morphing leading edge. Chin. J. Aeronaut. 2021, 34, 271–278. [Google Scholar]
- Malik, S.; Elaggan, E.; Dawson, P.J. Design, Analysis and Fabrication of Morphing Airfoil. In Proceedings of the AIAA Scitech 2021 Forum, Virtual. 11–15, 19–21 January 2021; p. 0352. [Google Scholar]
- Arena, M.; Concilio, A.; Pecora, R. Aero-servo-elastic design of a morphing wing trailing edge system for enhanced cruise performance. Aerosp. Sci. Technol. 2019, 86, 215–235. [Google Scholar] [CrossRef]
- Carossa, G.M.; Ricci, S.; De Gaspari, A.; Liauzun, C.; Dumont, A.; Steinbuch, M. Adaptive Trailing Edge: Specifications, Aerodynamics, and Exploitation. In Smart Intelligent Aircraft Structures (SARISTU); Springer: Berlin/Heidelberg, Germany, 2016; pp. 143–158. [Google Scholar]
- Khurana, M.; Winarto, H.; Sinha, A. Airfoil geometry parameterization through shape optimizer and computational fluid dynamics. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008; p. 295. [Google Scholar]
- Trad, M.H.; Segui, M.; Botez, R.M. Airfoils Generation Using Neural Networks, CST Curves and Aerodynamic Coefficients. In Proceedings of the AIAA Aviation 2020 Forum,, Virtual. 15–19 June 2020; p. 2773. [Google Scholar]
- Vecchia, P.D.; Daniele, E.; D’Amato, E. An airfoil shape optimization technique coupling PARSEC parameterization and evolutionary algorithm. Aerosp. Sci. Technol. 2014, 32, 103–110. [Google Scholar] [CrossRef]
- Kulfan, B.M. Recent extensions and applications of the ‘CST’ universal parametric geometry representation method. Aeronaut. J. 2010, 114, 157–176. [Google Scholar] [CrossRef] [Green Version]
- Variable Camber Wing; Second Progress Report; AD911543; Boeing, Aerospace Company: Seattle, IL, USA, 1973.
- Decamp, R.; Hardy, R. Mission adaptive wing advanced research concepts. In Proceedings of the 11th Atmospheric Flight Mechanics Conference, Seattle, WA, USA, 21–23 August 1984; p. 2088. [Google Scholar]
- Bonnema, K.; Smith, S. AFTI/F-111 mission adaptive wing flight research program. In Proceedings of the 4th Flight Test Conference, San Diego, CA, USA, 18–20 May 1988; p. 2118. [Google Scholar]
- Smith, J.W. Variable-camber systems integration and operational performance of the AFTI/F-111 mission adaptive wing. Natl. Aeronaut. Space Adm. Off. Manag. 1992, 4370, 1478. [Google Scholar]
- Li, D.; Zhao, S.; Da Ronch, A.; Xiang, J.; Drofelnik, J.; Li, Y.; Zhang, L.; Wu, Y.; Kintscher, M.; Monner, H.P. A review of modelling and analysis of morphing wings. Prog. Aerosp. Sci. 2018, 100, 46–62. [Google Scholar] [CrossRef] [Green Version]
- Kota, S.; Ervin, G.; Osborn, R.; Ormiston, R. Design and fabrication of an adaptive leading edge rotor blade. In Proceedings of the Annual Forum Proceedings-American Helicopter Society, Montreal, QC, Canada, 29 April–1 May 2008; p. 2178. [Google Scholar]
- Kota, S.; Osborn, R.; Ervin, G.; Maric, D.; Flick, P.; Paul, D. Mission adaptive compliant wing-design, fabrication and flight test. In Proceedings of the RTO Applied Vehicle Technology Panel (AVT) Symposium, Evora, Portugal, 20–24 April 2009; p. 18. [Google Scholar]
- Monner, H.; Breitbach, E.; Bein, T.; Hanselka, H. Design aspects of the adaptive wing-the elastic trailing edge and the local spoiler bump. Aeronaut. J. 2000, 104, 89–95. [Google Scholar]
- Monner, H.; Kintscher, M.; Lorkowski, T.; Storm, S. Design of a smart droop nose as leading-edge high lift system for transportation aircrafts. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Palm Springs, CA, USA, 4–7 May 2009; p. 2128. [Google Scholar]
- Schweiger, J.; Suleman, A.; Kuzmina, S.; Chedrik, V. MDO concepts for a European research project on active aeroelastic aircraft. In Proceedings of the 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, Atlanta, GE, USA, 4–6 September 2002; p. 5403. [Google Scholar]
- Concilio, A.; Dimino, I.; Pecora, R. SARISTU: Adaptive Trailing Edge Device (ATED) design process review. Chin. J. Aeronaut. 2021, 34, 187–210. [Google Scholar] [CrossRef]
- Liauzun, C.; Le Bihan, D.; David, J.-M.; Joly, D.; Paluch, B. Study of morphing winglet concepts aimed at improving load control and the aeroelastic behavior of civil transport aircraft. Aerosp. Lab 2018, 1–15. [Google Scholar]
- De Gaspari, A.; Moens, F. Aerodynamic shape design and validation of an advanced high-lift device for a regional aircraft with morphing droop nose. Int. J. Aerosp. Eng. 2019, 2019, 7982168. [Google Scholar] [CrossRef] [Green Version]
- Koreanschi, A.; Sugar-Gabor, O.; Acotto, J.; Botez, R.M.; Mamou, M.; Mebarki, Y. A genetic algorithm optimization method for a morphing wing tip demonstrator validated using infra-red experimental data. In Proceedings of the 34th AIAA Applied Aerodynamics Conference, Washington, DC, USA, 13–17 June 2016; p. 4037. [Google Scholar]
- Koreanschi, A.; Sugar-Gabor, O.; Botez, R.M. Drag optimisation of a wing equipped with a morphing upper surface. Aeronaut. J. 2016, 120, 473. [Google Scholar] [CrossRef]
- Grigorie, T.L.; Botez, R.M.; Popov, A.V.; Mamou, M.; Mébarki, Y. A hybrid fuzzy logic proportional-integral-derivative and conventional on-off controller for morphing wing actuation using shape memory alloy Part 1: Morphing system mechanisms and controller architecture design. Aeronaut. J. 2012, 116, 433–449. [Google Scholar] [CrossRef] [Green Version]
- Popov, A.V.; Grigorie, T.L.; Botez, R.M.; Mébarki, Y.; Mamou, M. Modeling and testing of a morphing wing in open-loop architecture. J. Aircr. 2010, 47, 917–923. [Google Scholar] [CrossRef]
- Koreanschi, A.; Sugar-Gabor, O.; Acotto, J.; Brianchon, G.; Portier, G.; Botez, R.M.; Mamou, M.; Mebarki, Y. Optimization and design of a morphing wing tip aircraft demonstrator for drag reduction at low speeds, Part Π–Experimental validation using infra-red transition measurements during wind tunnel tests. Chin. J. Aeronaut. 2017, 30, 164–174. [Google Scholar] [CrossRef]
- Sugar-Gabor, O.; Koreanschi, A.; Botez, R.M.; Mamou, M.; Mebarki, Y. Numerical simulation and wind tunnel tests investigation and validation of a morphing wing-tip demonstrator aerodynamic performance. Aerosp. Sci. Technol. 2016, 53, 136–153. [Google Scholar] [CrossRef] [Green Version]
- Bashir, M.; Martel, S.L.; Botez, R.M.; Wong, T. Aerodynamic Design and Performance Optimization of Camber Adaptive Winglet for the UAS-S45. In Proceedings of the AIAA SciTech 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Bashir, M.; Martel, S.L.; Botez, R.M.; Wong, T. Aerodynamic Shape Optimization of Camber Morphing Airfoil based on Black Widow Optimization. In Proceedings of the AIAA SciTech 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Kulfan, B.M. Universal Parametric Geometry Representation Method. J. Aircr. 2008, 45, 142–158. [Google Scholar] [CrossRef]
- Sugar-Gabor, O.; Simon, A.; Koreanschi, A.; Botez, R. Application of a morphing wing technology on hydra technologies unmanned aerial system UAS-S4. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2014; p. V001T001A037. [Google Scholar]
- Sugar-Gabor, O.; Simon, A.; Koreanschi, A.; Botez, R.M. Improving the UAS-S4 Éhecal airfoil high angles-of-attack performance characteristics using a morphing wing approach. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 118–131. [Google Scholar] [CrossRef] [Green Version]
- Koreanschi, A.; Sugar-Gabor, O.; Acotto, J.; Brianchon, G.; Portier, G.; Botez, R.M.; Mamou, M.; Mebarki, Y. Optimization and design of an aircraft’s morphing wing-tip demonstrator for drag reduction at low speed, Part I-Aerodynamic optimization using genetic, bee colony and gradient descent algorithms. Chin. J. Aeronaut. 2017, 30, 149–163. [Google Scholar] [CrossRef]
- Hayyolalam, V.; Kazem, A.A.P. Black widow optimization algorithm: A novel meta-heuristic approach for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2020, 87, 103249. [Google Scholar] [CrossRef]
- Peerlings, B. A Review of Aerodynamic Flow Models, Solution Methods and Solvers and Their Applicability to Aircraft Conceptual Design; Delft University of Technology: Delft, The Netherlands, 2018. [Google Scholar]
- Langtry, R.; Menter, F. Transition modeling for general CFD applications in aeronautics. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005; p. 522. [Google Scholar]
- Okrent, J. An Integrated Method for Airfoil Optimization. Master’s Thesis, Lehigh University, Bethlehem, PA, USA, 2017. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle of Attack (°) | Reference Airfoil | Optimized Airfoil | Relative Difference in ‘%’ | |
|---|---|---|---|---|
| 2° | 0.00755 | 0.00663 | −12 | |
| 2° | 48.6887 | 56.1017 | 15 |
| Angle of Attack | Length of Flexible Section (m) | Reference Airfoil C_D | Optimized Airfoil C_D | Relative ‘%’ Difference |
|---|---|---|---|---|
| 0 | 0.05 | 0.0091 | 0.00691 | −24.06 |
| 1 | 0.10 | 0.00801 | 0.00729 | −8.98 |
| 2 | 0.07 | 0.00755 | 0.00663 | −12.18 |
| 3 | 0.09 | 0.0093 | 0.00674 | −27.52 |
| 4 | 0.23 | 0.00976 | 0.00643 | −34.11 |
| 5 | 0.24 | 0.0102 | 0.00648 | −36.47 |
| 6 | 0.23 | 0.00912 | 0.00678 | −25.65 |
| 7 | 0.29 | 0.01016 | 0.0097 | −4.52 |
| 8 | 0.29 | 0.01261 | 0.01143 | −9.35 |
| 9 | 0.25 | 0.01251 | 0.01108 | −11.43 |
| 10 | 0.29 | 0.01386 | 0.0129 | −6.92 |
| Reference Airfoil | Optimized Airfoil | Relative Difference in ‘%’ | |
|---|---|---|---|
| 29.52 | 32.48 | 10 | |
| 0.00872 | 0.00796 | −8 |
| Angle of Attack (°) | Length of Flexible Section | Reference | Optimized | Improvement ‘%’ |
|---|---|---|---|---|
| 0 | 0.19 | 5.86 | 9.06 | 54.51 |
| 1 | 0.06 | 15.28 | 19.54 | 27.86 |
| 2 | 0.12 | 29.52 | 32.48 | 10.05 |
| 3 | 0.06 | 34.68 | 49.78 | 43.55 |
| 4 | 0.24 | 44.63 | 65.67 | 47.13 |
| 5 | 0.18 | 55.30 | 93.42 | 68.94 |
| 6 | 0.21 | 78.94 | 114.83 | 45.45 |
| 7 | 0.19 | 81.90 | 130.02 | 58.75 |
| 8 | 0.22 | 78.81 | 142.62 | 80.96 |
| 9 | 0.23 | 91.34 | 154.41 | 69.05 |
| 10 | 0.20 | 95.11 | 160.50 | 68.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bashir, M.; Longtin-Martel, S.; Botez, R.M.; Wong, T. Optimization and Design of a Flexible Droop-Nose Leading-Edge Morphing Wing Based on a Novel Black Widow Optimization Algorithm—Part I. Designs 2022, 6, 10. https://doi.org/10.3390/designs6010010
Bashir M, Longtin-Martel S, Botez RM, Wong T. Optimization and Design of a Flexible Droop-Nose Leading-Edge Morphing Wing Based on a Novel Black Widow Optimization Algorithm—Part I. Designs. 2022; 6(1):10. https://doi.org/10.3390/designs6010010
Chicago/Turabian StyleBashir, Musavir, Simon Longtin-Martel, Ruxandra Mihaela Botez, and Tony Wong. 2022. "Optimization and Design of a Flexible Droop-Nose Leading-Edge Morphing Wing Based on a Novel Black Widow Optimization Algorithm—Part I" Designs 6, no. 1: 10. https://doi.org/10.3390/designs6010010
APA StyleBashir, M., Longtin-Martel, S., Botez, R. M., & Wong, T. (2022). Optimization and Design of a Flexible Droop-Nose Leading-Edge Morphing Wing Based on a Novel Black Widow Optimization Algorithm—Part I. Designs, 6(1), 10. https://doi.org/10.3390/designs6010010