
D2D Communication Underlaying UAV-Enabled Network: A Content-Sharing Perspective



Abstract
1. Introduction
- This research presents a comprehensive study on the utilization of clustering for content-centric networks targeted to be served by UAV-BS-underlaid D2D communication. This study is significantly different from the relevant literature since clustering has been under studied and conventionally either the UAV communicates to all the users in a given area or a hybrid approach is implemented where the UAV, BS, and D2D work together to deliver content.
- Though this article does not consider UAV trajectory planning, however, we introduce the concept of nested clustering to find a suitable stopping point for the UAV for content distribution.
- A comprehensive performance evaluation of the proposed scheme is presented considering various performance parameters such as energy consumption, network throughput, and content delivery delay. This study paints a promising picture for utilizing clustering in UAV-enabled scenarios for content delivery. This scheme is ideal for social events such as a football match in a stadium.
- A comparative study with state-of-the-art benchmarked schemes is presented as well. It is promising that all the considered performance parameters perform better than conventional and state-of-the-art schemes. Since the UAV only communicates with the CH, therefore, it is important to study the rates enjoyed by CH while downloading content from the UAV. To demonstrate a practical scenario, the height of the UAV is varied, and corresponding rates enjoyed by the CH were evaluated as well.
2. Literature Review
3. System Model
3.1. Energy Consumption
3.2. Content Delivery Delay
4. Clustering Mechanism
4.1. User Clustering
4.2. User-UAV Clustering: The One Cluster Case
- (i.)
- Node Locations (coordinates of all CHs and the UAV).
- (ii.)
- Association of all nodes to only one cluster. (hard-code k = 1).
- (i.)
- UAV is hard-coded to be the centroid (as opposed to randomly selecting a centroid).
- (ii.)
- UAV is randomly placed at location .
- (i.)
- Update the position, , of the UAV obtained in Step 3.
- (ii.)
- UAV moves, from the initial random placement, to the new ‘stop-position’.
5. Performance Evaluation
5.1. Simulation Setup
5.2. Benchmarking
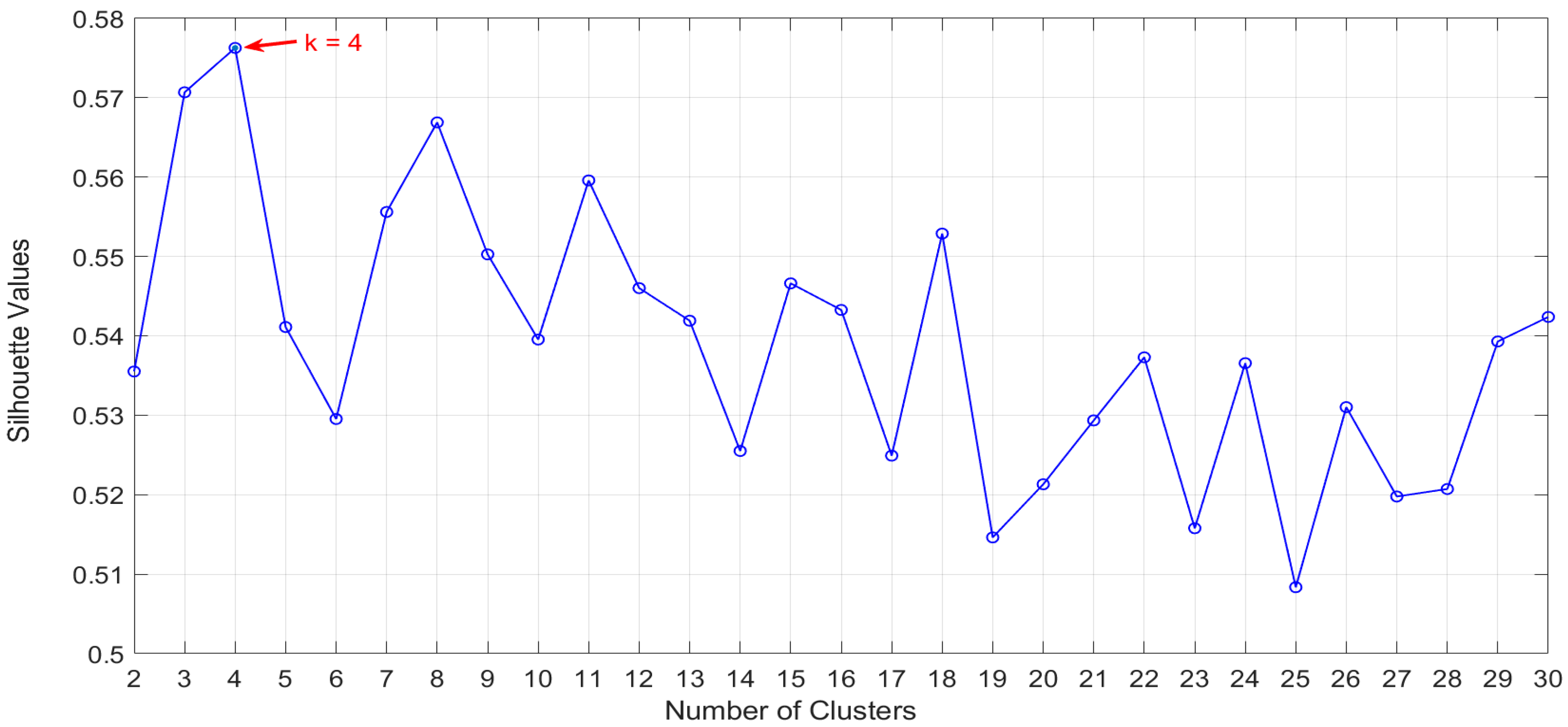
5.3. Determining the Number of Clusters (k)
5.4. Results
5.4.1. Network Throughput
5.4.2. Average Rate of the Cluster Heads V/S Height of the UAV
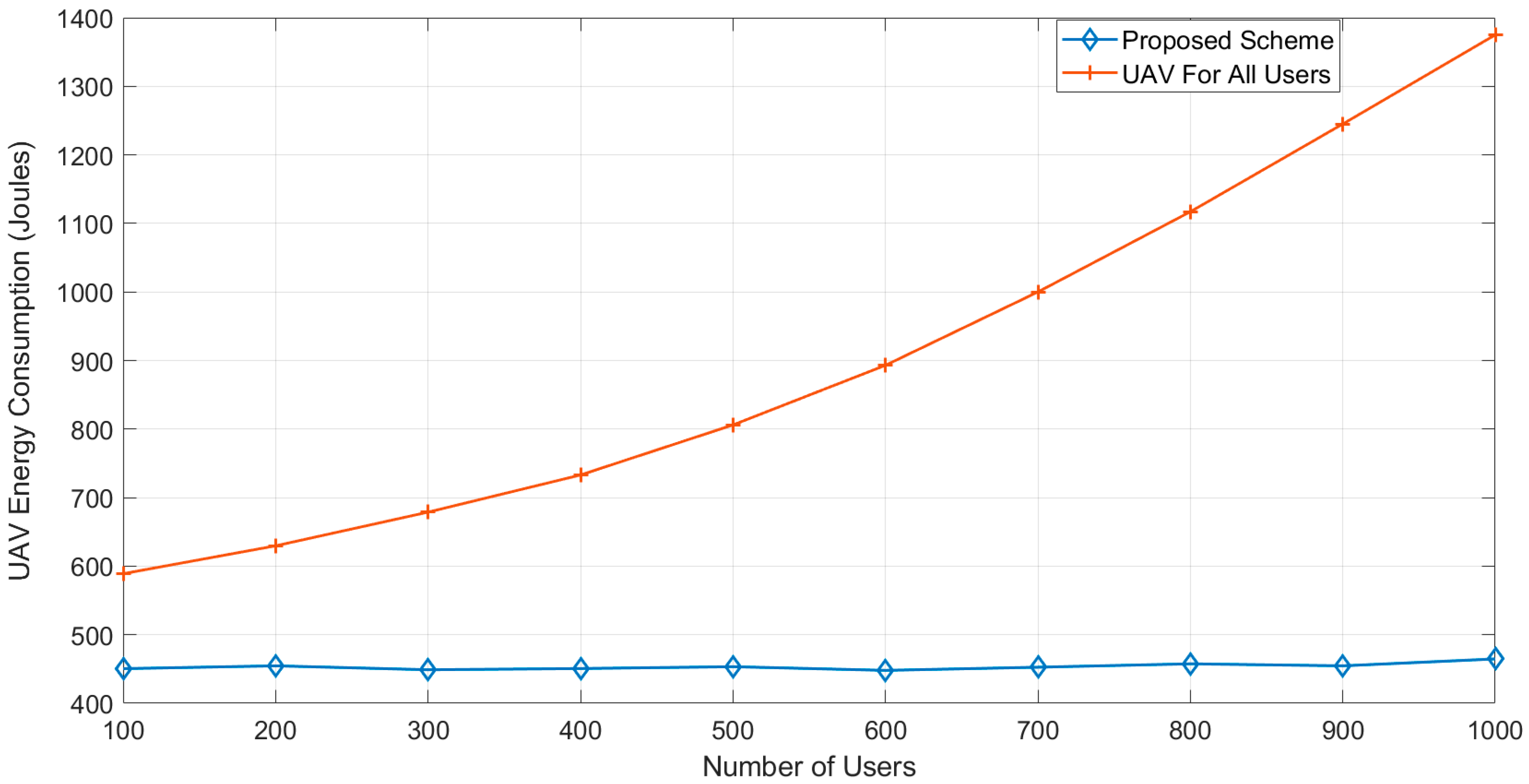
5.4.3. Energy Consumption
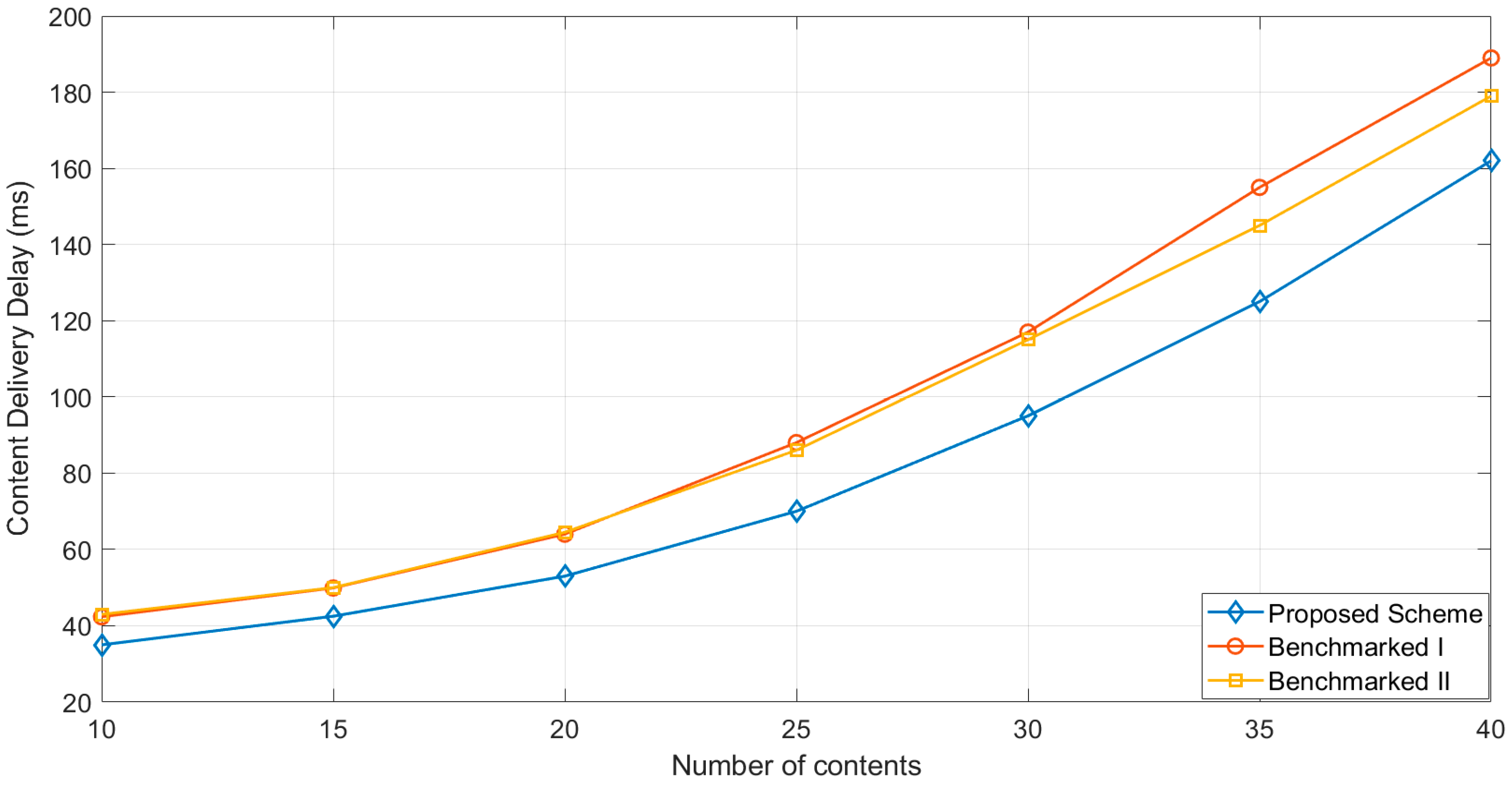
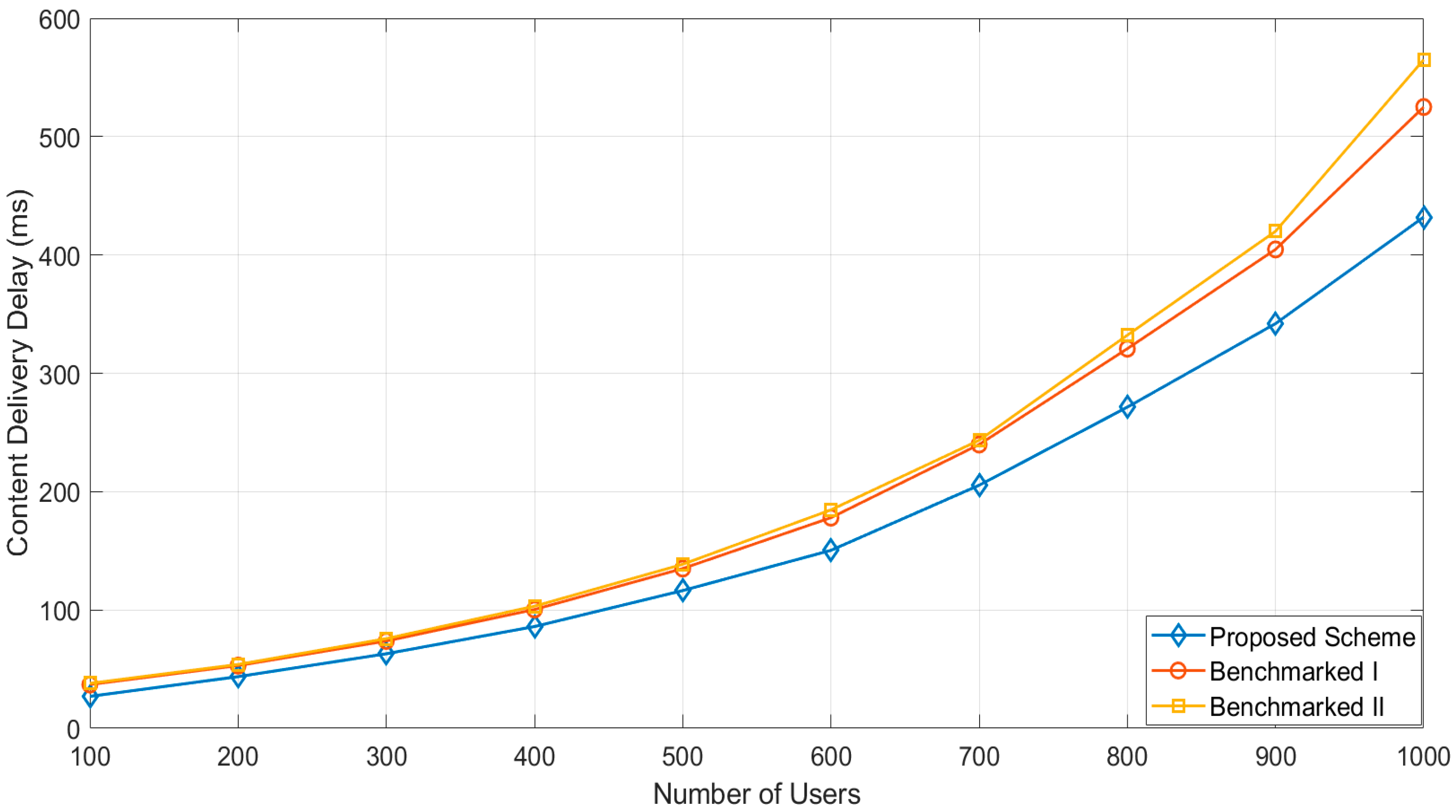
5.4.4. Content Delivery Delay
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chandrasekharan, S.; Gomez, K.; Al-Hourani, A.; Kandeepan, S.; Rasheed, T.; Goratti, L.; Reynaud, L.; Grace, D.; Bucaille, I.; Wirth, T.; et al. Designing and implementing future aerial communication networks. IEEE Commun. Mag. 2016, 54, 26–34. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Bor-Yaliniz, I.; Yanikomeroglu, H. The new frontier in RAN heterogeneity: Multi-tier drone-cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Tuan, H.D.; Duong, T.Q.; Poor, H.V.; Hwang, W.J. Joint D2D assignment, bandwidth and power allocation in cognitive UAV-enabled networks. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1084–1095. [Google Scholar] [CrossRef]
- Geraci, G.; Garcia-Rodriguez, A.; Azari, M.M.; Lozano, A.; Mezzavilla, M.; Chatzinotas, S.; Chen, Y.; Rangan, S.; Di Renzo, M. What will the future of UAV cellular communications be? A flight from 5G to 6G. IEEE Commun. Surv. Tutor. 2022, 24, 1304–1335. [Google Scholar] [CrossRef]
- Aslam, S.; Alam, F.; Hasan, S.F.; Rashid, M. A novel weighted clustering algorithm supported by a distributed architecture for D2D enabled content-centric networks. Sensors 2020, 20, 5509. [Google Scholar] [CrossRef]
- Selim, M.M.; Rihan, M.; Yang, Y.; Ma, J. Optimal task partitioning, Bit allocation and trajectory for D2D-assisted UAV-MEC systems. Peer-Peer Netw. Appl. 2021, 14, 215–224. [Google Scholar] [CrossRef]
- Wu, D.; Zhou, L.; Cai, Y.; Chao, H.-C.; Qian, Y. Physical–Social-Aware D2D Content Sharing Networks: A Provider–Demander Matching Game. IEEE Trans. Veh. Technol. 2018, 67, 7538–7549. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Optimal UAV positioning for terrestrial-aerial communication in presence of fading. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Chen, J.; Gesbert, D. Optimal positioning of flying relays for wireless networks: A LOS map approach. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- He, H.; Zhang, S.; Zeng, Y.; Zhang, R. Joint altitude and beamwidth optimization for UAV-enabled multiuser communications. IEEE Commun. Lett. 2018, 22, 344–347. [Google Scholar] [CrossRef]
- Pathan, A.M.K.; Buyya, R. A Taxonomy and Survey of Content Delivery Networks; Technical Report; Grid Computing and Distributed Systems Laboratory, University of Melbourne: Parkville, Australia, 2007. [Google Scholar]
- Kaisar, S.; Kamruzzaman, J.; Karmakar, G.; Rashid, M.M. Decentralized content sharing in mobile ad-hoc networks: A survey. Digit. Commun. Netw. 2022, 1–51. [Google Scholar] [CrossRef]
- Chai, S.; Lau, V.K.N. Online trajectory and radio resource optimization of cache-enabled UAV wireless networks with content and energy recharging. IEEE Trans. Signal Process. 2020, 68, 1286–1299. [Google Scholar] [CrossRef]
- Bera, A.; Misra, S.; Chatterjee, C. QoE analysis in cache-enabled multi-UAV networks. IEEE Trans. Veh. Technol. 2020, 69, 6680–6687. [Google Scholar] [CrossRef]
- Asheralieva, A.; Niyato, D. Game theory and Lyapunov optimization for cloud-based content delivery networks with device-to-device and UAV-enabled caching. IEEE Trans. Veh. Technol. 2019, 68, 10094–10110. [Google Scholar] [CrossRef]
- Guo, Y.; Duan, L.; Zhang, R. Cooperative local caching under heterogeneous file preferences. IEEE Trans. Commun. 2017, 65, 444–457. [Google Scholar] [CrossRef]
- Xu, X.; Zeng, Y.; Guan, Y.L.; Zhang, R. Overcoming endurance issue: UAV-enabled communications with proactive caching. IEEE J. Sel. Areas Commun. 2018, 36, 1231–1244. [Google Scholar] [CrossRef]
- Huang, W.; Yang, Z.; Pan, C.; Pei, L.; Chen, M.; Shikh-Bahaei, M.; Elkashlan, M.; Nallanathan, A. Joint Power, Altitude, Location and Bandwidth Optimization for UAV with Underlaid D2D Communications. IEEE Wirel. Commun. Lett. 2019, 8, 524–527. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Ding, G.; Chen, J.; Li, Y.; Han, Z. Spectrum Sharing Planning for Full-Duplex UAV Relaying Systems with Underlaid D2D Communications. IEEE J. Sel. Areas Commun. 2018, 36, 1986–1999. [Google Scholar] [CrossRef]
- Lin, N.; Fan, Y.; Zhao, L.; Li, X.; Guizani, M. GREEN: A Global Energy Efficiency Maximization Strategy for Multi-UAV Enabled Communication Systems. IEEE Trans. Mob. Comput. 2022, 1–18. [Google Scholar] [CrossRef]
- Lin, N.; Fu, L.; Zhao, L.; Min, G.; Al-Dubai, A.; Gacanin, H. A novel multimodal collaborative drone-assisted VANET networking model. IEEE Trans. Wirel. Commun. 2020, 19, 4919–4933. [Google Scholar] [CrossRef]
- Lin, N.; Liu, Y.; Zhao, L.; Wu, D.O.; Wang, Y. An Adaptive UAV Deployment Scheme for Emergency Networking. IEEE Trans. Wirel. Commun. 2021, 21, 2383–2398. [Google Scholar] [CrossRef]
- Ortiz, S.; Calafate, C.T.; Cano, J.C.; Manzoni, P.; Toh, C.K. A UAV-based content delivery architecture for rural areas and future smart cities. IEEE Internet Comput. 2018, 23, 29–36. [Google Scholar] [CrossRef]
- Kalinagac, O.; Kafiloglu, S.S.; Alagoz, F.; Gur, G. Caching and D2D sharing for content delivery in software-defined UAV networks. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Khuwaja, A.A.; Zhu, Y.; Zheng, G.; Chen, Y.; Liu, W. Performance analysis of hybrid UAV networks for probabilistic content caching. IEEE Syst. J. 2020, 15, 4013–4024. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, Z.; Liu, Y.; Xu, W.; Nallanathan, A. Caching placement and resource allocation for cache-enabling UAV NOMA networks. IEEE Trans. Veh. Technol. 2020, 69, 12897–12911. [Google Scholar] [CrossRef]
- Liu, D.; Xu, Y.; Wang, J.; Chen, J.; Wu, Q.; Anpalagan, A.; Xu, K.; Zhang, Y. Opportunistic utilization of dynamic multi-UAV in device-to-device communication networks. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1069–1083. [Google Scholar] [CrossRef]
- Al-Hilo, A.; Samir, M.; Assi, C.; Sharafeddine, S.; Ebrahimi, D. Cooperative content delivery in UAV-RSU assisted vehicular networks. In Proceedings of the 2nd ACM MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, London, UK, 25 September 2020; pp. 73–78. [Google Scholar]
- Wang, Z.; Zhang, T.; Liu, Y.; Xu, W. Deep reinforcement learning for caching placement and content delivery in UAV NOMA networks. In Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 21–23 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 406–411. [Google Scholar]
- Al-Hilo, A.; Samir, M.; Assi, C.; Sharafeddine, S.; Ebrahimi, D. UAV-assisted content delivery in intelligent transportation systems-joint trajectory planning and cache management. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5155–5167. [Google Scholar] [CrossRef]
- Su, Z.; Dai, M.; Xu, Q.; Li, R.; Zhang, H. Uav enabled content distribution for internet of connected vehicles in 5g heterogeneous networks. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5091–5102. [Google Scholar] [CrossRef]
- Wang, W.; Cheng, N.; Liu, Y.; Zhou, H.; Lin, X.; Shen, X. Content delivery analysis in cellular networks with aerial caching and mmwave backhaul. IEEE Trans. Veh. Technol. 2021, 70, 4809–4822. [Google Scholar] [CrossRef]
- Wei, M.; Chen, Y.; Ding, M. On the performance of UAV-aided content caching in small-cell networks with joint transmission. Electronics 2021, 10, 1040. [Google Scholar] [CrossRef]
- Wang, X.; Chen, M.; Taleb, T.; Ksentini, A.; Leung, V.C.M. Cache in the air: Exploiting content caching and delivery techniques for 5G systems. IEEE Commun. Mag. 2014, 52, 131–139. [Google Scholar] [CrossRef]
- Ji, M.; Caire, G.; Molisch, A.F. Wireless device-to-device caching networks: Basic principles and system performance. IEEE J. Sel. Areas Commun. 2016, 34, 176–189. [Google Scholar] [CrossRef]
- Tao, M.; Chen, E.; Zhou, H.; Yu, W. Content-centric sparse multicast beamforming for cache-enabled cloud RAN. IEEE Trans. Wirel. Commun. 2016, 15, 6118–6131. [Google Scholar] [CrossRef]
- Zhou, B.; Cui, Y.; Tao, M. Optimal dynamic multicast scheduling for cache-enabled content-centric wireless networks. IEEE Trans. Commun. 2017, 65, 2956–2970. [Google Scholar] [CrossRef]
- Yaacoub, E.; Kubbar, O. Energy-efficient device-to-device communications in LTE public safety networks. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Han, Y.; Li, G.; Xu, R.; Su, J.; Li, J.; Wen, G. Clustering the wireless sensor networks: A meta-heuristic approach. IEEE Access. 2020, 8, 214551–214564. [Google Scholar] [CrossRef]
- Aslam, S.; Alam, F.; Hasan, S.F.; Rashid, M. Performance Analysis of Clustering Algorithms for Content-Sharing Based D2D Enabled 5G Networks. In Proceedings of the 2019 29th International Telecommunication Networks and Applications Conference (ITNAC), Auckland, New Zealand, 27–29 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Elshrkasi, A.; Dimyati, K.; Ahmad, K.A.B.; bin Mohamed Said, M.F. Enhancement of cellular networks via an improved clustering technique with D2D communication for mission-critical applications. J. Netw. Comput. Appl. 2022, 206, 103482. [Google Scholar] [CrossRef]
- Park, H.S.; Jun, C.H. A simple and fast algorithm for K-medoids clustering. Expert Syst. Appl. 2009, 36, 3336–3341. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, Y.; Yi, W.; Liu, Y.; Nallanathan, A. Joint Optimization of Caching Placement and Trajectory for UAV-D2D Networks. IEEE Trans. Commun. 2022, 70, 5514–5527. [Google Scholar] [CrossRef]
- Shang, B.; Liu, L.; Rao, R.M.; Marojevic, V.; Reed, J.H. 3D spectrum sharing for hybrid D2D and UAV networks. IEEE Trans. Commun. 2020, 6, 5375–5389. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J.; Ding, G.; Wang, S. D2D communications underlaying UAV-assisted access networks. IEEE Access 2018, 6, 46244–46255. [Google Scholar] [CrossRef]
- Luo, L.; Chai, R. Cost-efficient uav deployment for content fetching in cellular d2d systems. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Shutaywi, M.; Kachouie, N.N. Silhouette analysis for performance evaluation in machine learning with applications to clustering. Entropy 2021, 23, 759. [Google Scholar] [CrossRef]
- Zhou, Z.; Yu, H.; Xu, C.; Zhang, Y.; Mumtaz, S.; Rodriguez, J. Dependable content distribution in D2D-based cooperative vehicular networks: A big data-integrated coalition game approach. IEEE Trans. Intell. Transp. Syst. 2018, 19, 953–964. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S#. | Published Research Works | Year | UAV—Content Provider | Clustering Approach |
|---|---|---|---|---|
| 1 | [18] | 2018 | Yes | No |
| 2 | [24] | 2018 | Yes | No |
| 3 | [25] | 2019 | Yes | No |
| 4 | [26] | 2020 | Yes | No |
| 5 | [27] | 2020 | Yes | No |
| 6 | [28] | 2020 | Yes | No |
| 7 | [29] | 2020 | Yes | No |
| 8 | [30] | 2020 | Yes | No |
| 9 | [31] | 2020 | Yes | No |
| 10 | [32] | 2021 | Yes | No |
| 11 | [33] | 2021 | Yes | No |
| 12 | [34] | 2021 | Yes | No |
| Parameter | Value |
|---|---|
| Simulations | 10,000 |
| Stadium radius | 400 m |
| Path loss exponent for D2D links | 4 |
| Path loss exponent for UAV-user | 2.25 |
| Path loss exponent for conventional BS ground users | 3.25 (used for implementing Benchmarked II) |
| Noise power | −130 dBm |
| UAVs transmit power | 23 dBm |
| D2D CH transmit power | 23 dBm |
| Base station transmit power | 43 dBm (used for implementing Benchmarked II) |
| Power required to receive data from UAV | 1.8 Joules/s |
| Power required to receive data from CH | 0.925 Joules/s |
| System bandwidth | 5 MHz |
| Resource block bandwidth | 180 KHz |
| Height of the UAV | 100 m |
| Content size | Uniformly distributed within interval (1–5) Mb. |
| Number of Content | 10, 15, 20, 25, 30, 35, 40. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aslam, S.; Harris, M.; Siddiq, S. D2D Communication Underlaying UAV-Enabled Network: A Content-Sharing Perspective. Inventions 2023, 8, 5. https://doi.org/10.3390/inventions8010005
Aslam S, Harris M, Siddiq S. D2D Communication Underlaying UAV-Enabled Network: A Content-Sharing Perspective. Inventions. 2023; 8(1):5. https://doi.org/10.3390/inventions8010005
Chicago/Turabian StyleAslam, Saad, Muhammad Harris, and Salman Siddiq. 2023. "D2D Communication Underlaying UAV-Enabled Network: A Content-Sharing Perspective" Inventions 8, no. 1: 5. https://doi.org/10.3390/inventions8010005
APA StyleAslam, S., Harris, M., & Siddiq, S. (2023). D2D Communication Underlaying UAV-Enabled Network: A Content-Sharing Perspective. Inventions, 8(1), 5. https://doi.org/10.3390/inventions8010005