

Variants of Chaotic Grey Wolf Heuristic for Robust Identification of Control Autoregressive Model

 ,
,
Abstract
1. Introduction
- The parameter estimation problem of a system represented by the ARX model is investigated through optimization knacks of an improved chaotic grey wolf optimizer (ICGWO).
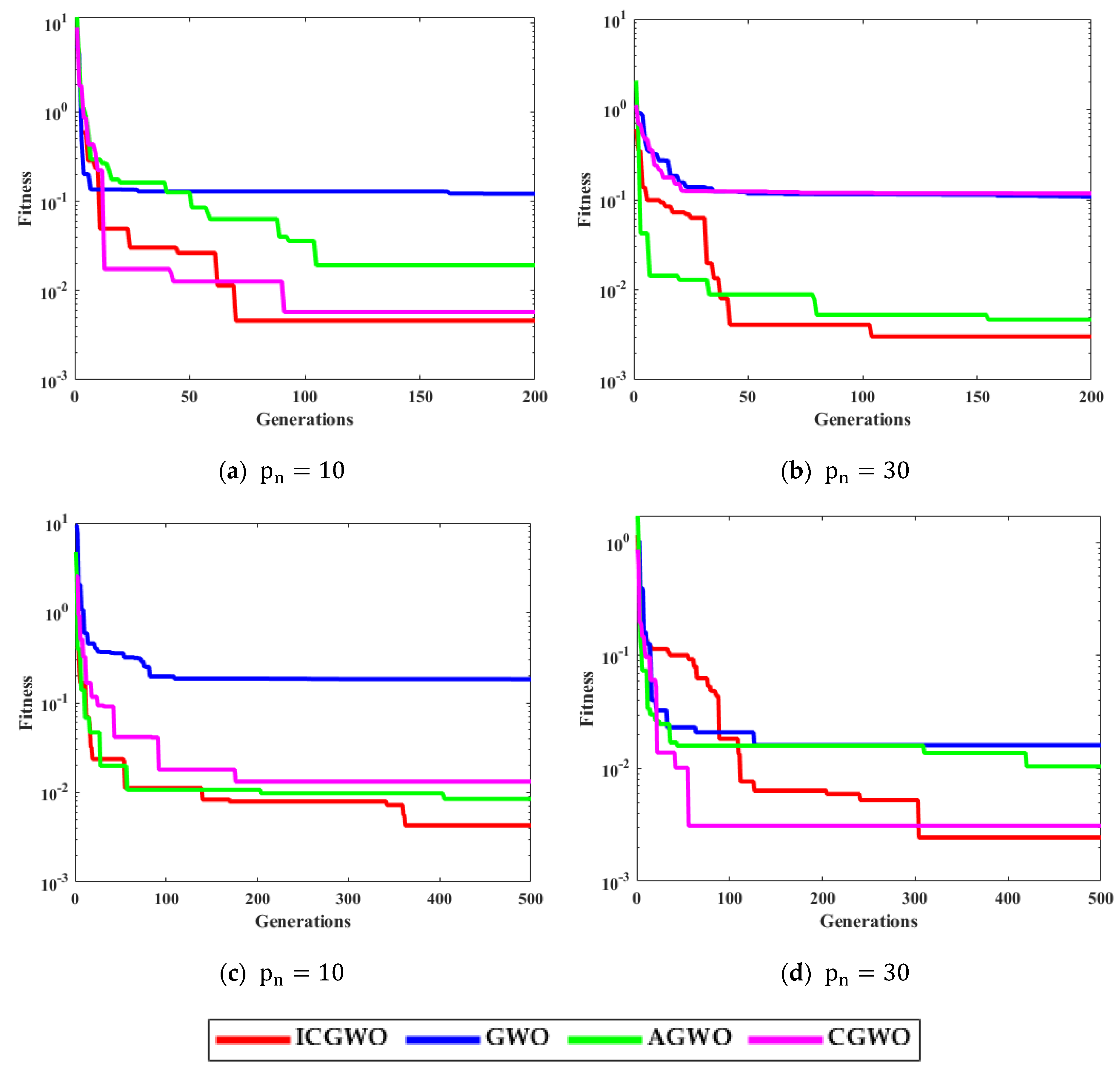
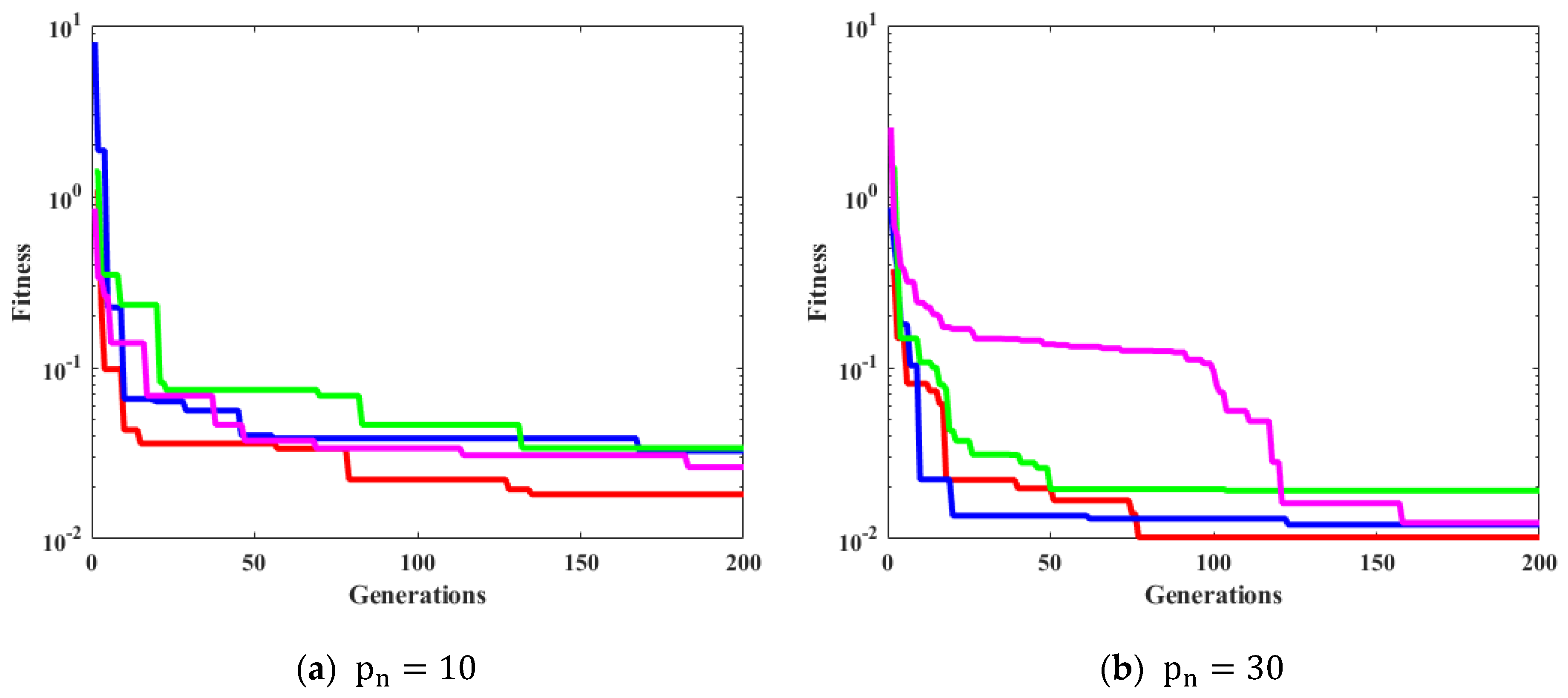
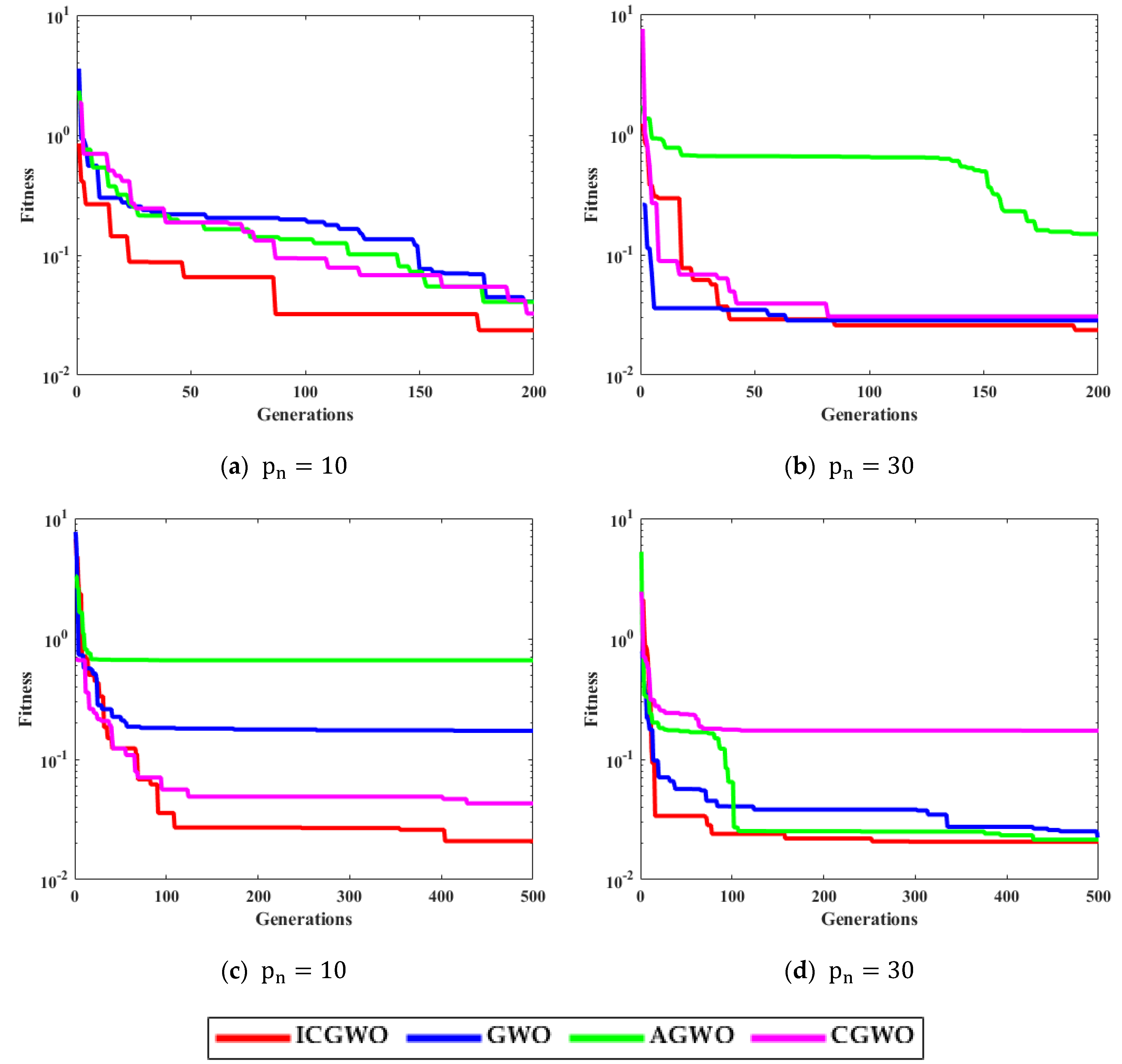
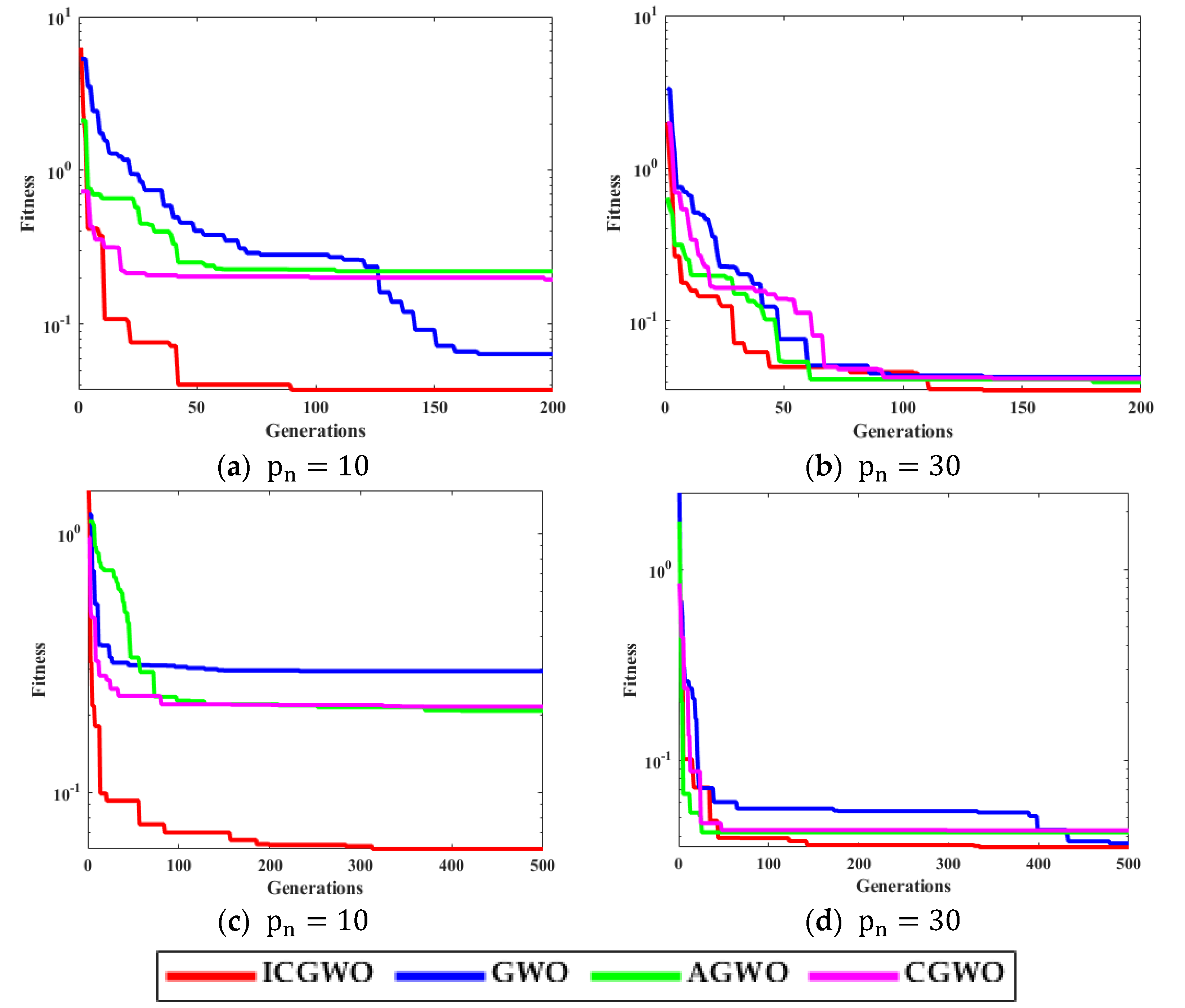
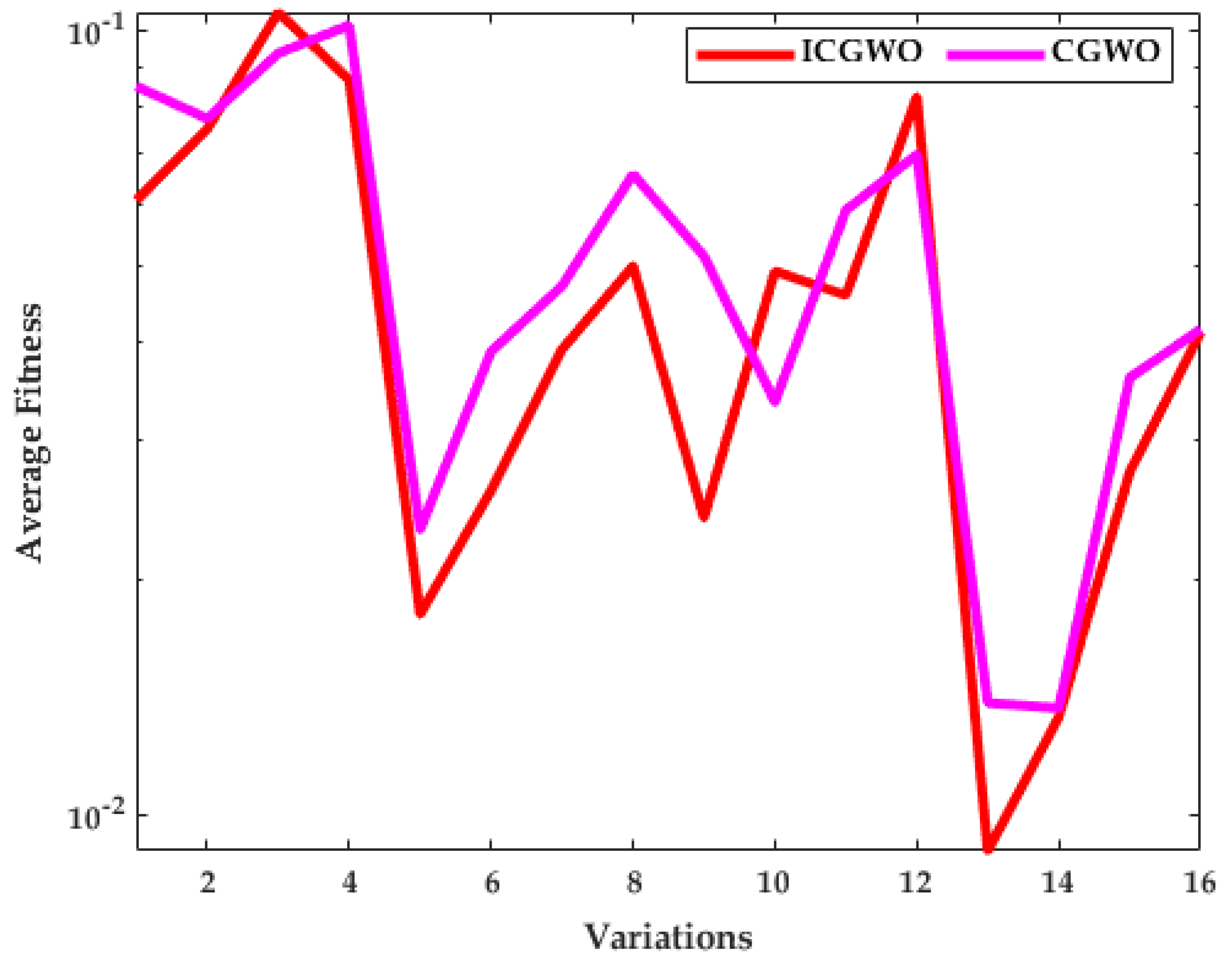
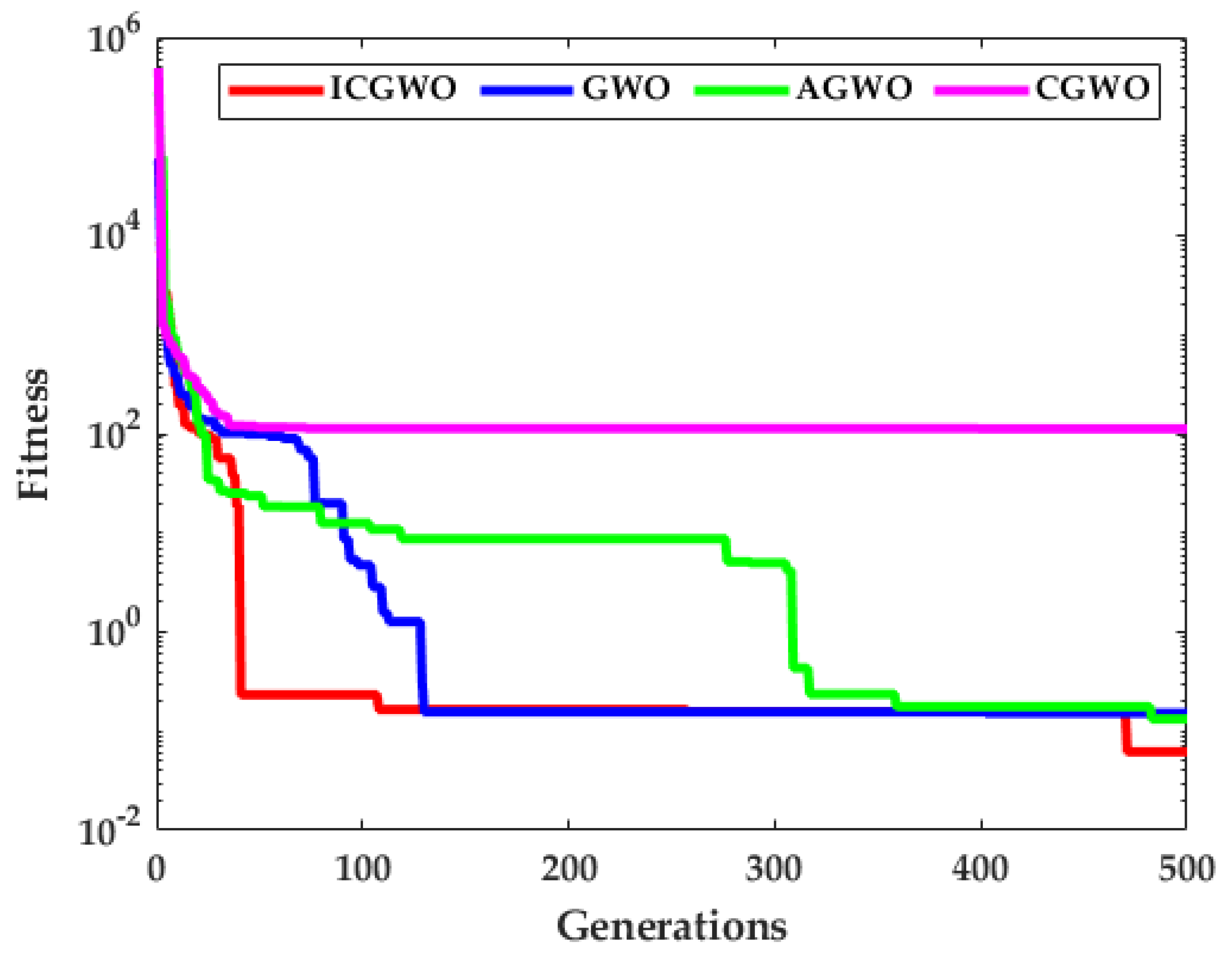
- The performance of the proposed ICGWO scheme is examined in detail through comparison with the conventional counterparts for various generations, populations, and noise levels.
- The statistical analysis through multiple independent trials confirms the accurate and robust performance of the ICGWO over the GWO, CGWO, and AGWO.
- The accurate estimation for a practical example of a temperature process system further validates the convergent performance of the ICGWO.
2. ARX Mathematical Model
3. An Improved Chaotic Grey Wolf Optimization (ICGWO)
3.1. Social Hierarchy
3.2. Encircling Prey
3.3. Hunting
3.4. Attacking
3.5. Chaotic Map
4. Experimental Analysis
Application to LD-Didactic Temperature Process Plant
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Young, P.C. Stochastic, Dynamic Modelling and Signal Processing: Time Variable and State Dependent Parameter Estimation. In Nonlinear Nonstationary Signal Processing; The Press Syndicate of the University of Cambridge: Cambridge, UK, 2000; pp. 4–114. [Google Scholar]
- Mehmood, K.; Chaudhary, N.I.; Khan, Z.A.; Cheema, K.M.; Raja, M.A.Z.; Milyani, A.H.; Azhari, A.A. Nonlinear Hammerstein System Identification: A Novel Application of Marine Predator Optimization Using the Key Term Separation Technique. Mathematics 2022, 10, 4217. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, H.; Zhang, Z.; Zhang, K.; Wang, L. Parameters Tuning of Fractional-Order Proportional Integral Derivative in Water Turbine Governing System Using an Effective SDO with Enhanced Fitness-Distance Balance and Adaptive Local Search. Water 2022, 14, 3035. [Google Scholar] [CrossRef]
- Shadab, S.; Revati, G.; Wagh, S.R.; Singh, N.M. Finite-time parameter estimation for an online monitoring of transformer: A system identification perspective. Int. J. Electr. Power Energy Syst. 2023, 145, 108639. [Google Scholar] [CrossRef]
- Ćalasan, M.; Aleem, S.H.A.; Hasanien, H.M.; Alaas, Z.M.; Ali, Z.M. An innovative approach for mathematical modeling and parameter estimation of PEM fuel cells based on iterative Lambert W function. Energy 2023, 264, 126165. [Google Scholar] [CrossRef]
- Diao, Y.; Jelescu, I. Parameter estimation for WMTI-Watson model of white matter using encoder–decoder recurrent neural network. Magn. Reson. Med. 2023, 89, 1193–1206. [Google Scholar] [CrossRef]
- Jumamyradov, M.; Craig, B.M.; Munkin, M.; Greene, W. Comparing the Conditional Logit Estimates and True Parameters under Preference Heterogeneity: A Simulated Discrete Choice Experiment. Econometrics 2023, 11, 4. [Google Scholar] [CrossRef]
- Mehmood, A.; Raja, M.A.Z. Novel design of weighted differential evolution for parameter estimation of Hammerstein-Wiener systems. J. Adv. Res. 2023, 43, 123–136. [Google Scholar] [CrossRef]
- Gao, J.; Cui, Y.; Ji, X.; Wang, X.; Hu, G.; Liu, F. A Parametric Identification Method of Human Gait Differences and its Application in Rehabilitation. Appl. Sci. 2019, 9, 4581. [Google Scholar] [CrossRef]
- Waleed, U.; Haseeb, A.; Ashraf, M.M.; Siddiq, F.; Rafiq, M.; Shafique, M. A Multiobjective Artificial-Hummingbird-Algorithm-Based Framework for Optimal Reactive Power Dispatch Considering Renewable Energy Sources. Energies 2022, 15, 9250. [Google Scholar] [CrossRef]
- Atanasov, A.Z.; Georgiev, S.G.; Vulkov, L.G. Parameter Estimation Analysis in a Model of Honey Production. Axioms 2023, 12, 214. [Google Scholar] [CrossRef]
- Liao, Y.; Zhao, W.; Wang, L. Improved Manta Ray Foraging Optimization for Parameters Identification of Magnetorheological Dampers. Mathematics 2021, 9, 2230. [Google Scholar] [CrossRef]
- Malik, N.A.; Chang, C.-L.; Chaudhary, N.I.; Khan, Z.A.; Raja, M.A.Z.; Kiani, A.K.; Milyani, A.H.; Azhari, A.A. Parameter estimation of harmonics arising in electrical instruments of smart grids using cuckoo search heuristics. Front. Energy Res. 2022, 10, 1059132. [Google Scholar] [CrossRef]
- Sun, J.; Garibaldi, J.M.; Hodgman, C. Parameter estimation using metaheuristics in systems biology: A comprehensive review. IEEE/ACM Trans. Comput. Biol. Bioinform. 2011, 91, 185–202. [Google Scholar]
- Bardet, J.-M.; Lang, G.; Oppenheim, G.; Philippe, A.; Stoev, S.; Taqqu, M.S. Semi-parametric estimation of the long-range dependence parameter: A survey. Theory Appl. Long-Range Depend. 2003, 557, 577. [Google Scholar]
- Raja, M.A.Z.; Chaudhary, N.I. Two-stage fractional least mean square identification algorithm for parameter estimation of CARMA systems. Signal Process. 2015, 107, 327–339. [Google Scholar] [CrossRef]
- Jabri, M.; Chouiref, H.; Jerbi, H.; Braiek, N.B. Fuzzy Logic Parameter Estimation of an Electrical System. In Proceedings of the 2008 5th International Multi-Conference on Systems, Signals and Devices, Amman, Jordan, 20–22 July 2008. [Google Scholar]
- Venkateswari, R.; Rajasekar, N. Review on parameter estimation techniques of solar photovoltaic systems. Int. Trans. Electr. Energy Syst. 2021, 31, e13113. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, Y. Machine learning based decision making for time varying systems: Parameter estimation and performance optimization. Knowl.-Based Syst. 2020, 190, 105479. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995. [Google Scholar]
- Wang, L.; Cao, Q.; Zhang, Z.; Mirjalili, S.; Zhao, W. Artificial rabbits optimization: A new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2022, 114, 105082. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Mirjalili, S. Artificial hummingbird algorithm: A new bio-inspired optimizer with its engineering applications. Comput. Methods Appl. Mech. Eng. 2022, 388, 114194. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput. Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Pira, E. City councils evolution: A socio-inspired metaheuristic optimization algorithm. J. Ambient. Intell. Humaniz. Comput. 2022, 1–50. [Google Scholar] [CrossRef]
- Faridmehr, I.; Nehdi, M.L.; Davoudkhani, I.F.; Poolad, A. Mountaineering Team-Based Optimization: A Novel Human-Based Metaheuristic Algorithm. Mathematics 2023, 11, 1273. [Google Scholar] [CrossRef]
- Askari, Q.; Younas, I.; Saeed, M. Political Optimizer: A novel socio-inspired meta-heuristic for global optimization. Knowl.-Based Syst. 2020, 195, 105709. [Google Scholar] [CrossRef]
- Borji, A. A New Global Optimization Algorithm Inspired by Parliamentary Political Competitions. In MICAI 2007: Advances in Artificial Intelligence, Proceedings of the 6th Mexican International Conference on Artificial Intelligence, Aguascalientes, Mexico, 4–10 November 2007; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Price, K.V. Differential Evolution. In Handbook of Optimization; Springer: Berlin/Heidelberg, Germany, 2013; pp. 187–214. [Google Scholar]
- Chen, Z.; Francis, A.; Li, S.; Liao, B.; Xiao, D.; Ha, T.T.; Li, J.; Ding, L.; Cao, X. Egret Swarm Optimization Algorithm: An Evolutionary Computation Approach for Model Free Optimization. Biomimetics 2022, 7, 144. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic Algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Sulaiman, M.H.; Mustaffa, Z.; Saari, M.M.; Daniyal, H.; Mirjalili, S. Evolutionary mating algorithm. Neural Comput. Appl. 2023, 35, 487–516. [Google Scholar] [CrossRef]
- Erol, O.K.; Eksin, I. A new optimization method: Big bang–big crunch. Adv. Eng Softw. 2006, 37, 106–111. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Turky, R.A.; Alghuwainem, S.; Tostado-Véliz, M.; Jurado, F. Circle Search Algorithm: A Geometry-Based Metaheuristic Optimization Algorithm. Mathematics 2022, 10, 1626. [Google Scholar] [CrossRef]
- Gholizadeh, S.; Danesh, M.; Gheyratmand, C. A new Newton metaheuristic algorithm for discrete performance-based design optimization of steel moment frames. Comput. Struct. 2020, 234, 106250. [Google Scholar] [CrossRef]
- Mirrashid, M.; Naderpour, H. Transit search: An optimization algorithm based on exoplanet exploration. Results Control. Optim. 2022, 7, 100127. [Google Scholar] [CrossRef]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm–A novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110, 151–166. [Google Scholar] [CrossRef]
- Shayanfar, H.; Gharehchopogh, F.S. Farmland fertility: A new metaheuristic algorithm for solving continuous optimization problems. Appl. Soft Comput. 2018, 71, 728–746. [Google Scholar] [CrossRef]
- Yuan, Z.; Wang, W.; Wang, H.; Razmjooy, N. A new technique for optimal estimation of the circuit-based PEMFCs using developed Sunflower Optimization Algorithm. Energy Rep. 2020, 6, 662–671. [Google Scholar] [CrossRef]
- Bayraktar, Z.; Komurcu, M.; Werner, D.H. Wind Driven Optimization (WDO): A Novel Nature-Inspired Optimization Algorithm and Its Application to Electromagnetics. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, Toronto, ON, Canada, 11–17 July 2010. [Google Scholar]
- Yang, D.; Li, G.; Cheng, G. On the efficiency of chaos optimization algorithms for global optimization. Chaos Solitons Fractals 2007, 34, 1366–1375. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Y.; Wang, K.; Liu, Z. An Irreversible and Revocable Template Generation Scheme Based on Chaotic System. Entropy 2023, 25, 378. [Google Scholar] [CrossRef]
- Dridi, F.; El Assad, S.; El Hadj Youssef, W.; Machhout, M. Design, Hardware Implementation on FPGA and Performance Analysis of Three Chaos-Based Stream Ciphers. Fractal Fract. 2023, 7, 197. [Google Scholar] [CrossRef]
- Andreyev, Y. Analytical Model of an Energy Detector for Ultra-Wideband Chaotic Communications. Electronics 2023, 12, 954. [Google Scholar] [CrossRef]
- Bian, H.; Zhang, X.; Li, P.; Jia, Z.; Ma, L.; Xu, B.; Shore, K.A.; Qin, Y.; Wang, Y. Sub-40 GHz Broadband Polarization Chaos Generation Using Mutually Coupled Free-Running VCSELs. Photonics 2023, 10, 219. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, L.; Zhao, W.; Liu, X. Parameter Identification of a Governing System in a Pumped Storage Unit Based on an Improved Artificial Hummingbird Algorithm. Energies 2022, 15, 6966. [Google Scholar] [CrossRef]
- Jirjees, S.W.; Alkalid, F.F.; Shareef, W.F. Image Encryption Using Dynamic Image as a Key Based on Multilayers of Chaotic Permutation. Symmetry 2023, 15, 409. [Google Scholar] [CrossRef]
- Babajans, R.; Cirjulina, D.; Capligins, F.; Kolosovs, D.; Grizans, J.; Litvinenko, A. Performance Analysis of Vilnius Chaos Oscillator-Based Digital Data Transmission Systems for IoT. Electronics 2023, 12, 709. [Google Scholar] [CrossRef]
- Song, S.; Jia, H.; Ma, J. A Chaotic Electromagnetic Field Optimization Algorithm Based on Fuzzy Entropy for Multilevel Thresholding Color Image Segmentation. Entropy 2019, 21, 398. [Google Scholar] [CrossRef]
- Firdous, A.; ur Rehman, A.; Saad Missen, M.M. A highly efficient color image encryption based on linear transformation using chaos theory and SHA-2. Multimed. Tools Appl. 2019, 78, 24809–24835. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Biogeography-based optimisation with chaos. Neural Comput. Appl. 2014, 25, 1077–1097. [Google Scholar] [CrossRef]
- Yang, J.; Liu, Z.; Zhang, X.; Hu, G. Elite Chaotic Manta Ray Algorithm Integrated with Chaotic Initialization and Opposition-Based Learning. Mathematics 2022, 10, 2960. [Google Scholar] [CrossRef]
- Hassan, M.H.; Elsayed, S.K.; Kamel, S.; Rahmann, C.; Taha, I.B.M. Developing chaotic Bonobo optimizer for optimal power flow analysis considering stochastic renewable energy resources. Int. J. Energy Res. 2022, 46, 11291–11325. [Google Scholar] [CrossRef]
- Azeem, M.; Malik, T.N.; Muqeet, H.A.; Hussain, M.M.; Ali, A.; Khan, B.; Rehman, A.U. Combined Economic Emission Dispatch in Presence of Renewable Energy Resources Using CISSA in a Smart Grid Environment. Electronics 2023, 12, 715. [Google Scholar] [CrossRef]
- Mitić, M.; Vuković, N.; Petrović, M.; Miljković, Z. Chaotic fruit fly optimization algorithm. Knowl.-Based Syst. 2015, 89, 446–458. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.M.; Mirjalili, S. Chaotic krill herd optimization algorithm. Procedia Technol. 2014, 12, 180–185. [Google Scholar] [CrossRef]
- Ahmadi, M.; Mojallali, H. Chaotic invasive weed optimization algorithm with application to parameter estimation of chaotic systems. Chaos Solitons Fractals 2012, 45, 1108–1120. [Google Scholar] [CrossRef]
- Turgut, M.S.; Turgut, O.E.; Abualigah, L. Chaotic quasi-oppositional arithmetic optimization algorithm for thermo-economic design of a shell and tube condenser running with different refrigerant mixture pairs. Neural Comput. Appl. 2022, 34, 8103–8135. [Google Scholar] [CrossRef]
- Elnaghi, B.E.; Abelwhab, M.N.; Ismaiel, A.M.; Mohammed, R.H. Solar Hydrogen Variable Speed Control of Induction Motor Based on Chaotic Billiards Optimization Technique. Energies 2023, 16, 1110. [Google Scholar] [CrossRef]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Hu, G.; Qiao, Y.; Qin, X.; Wei, G. Approximate Multi-Degree Reduction of SG-Bézier Curves Using the Grey Wolf Optimizer Algorithm. Symmetry 2019, 11, 1242. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, J.; Xiong, X.; Chen, Z.; Gong, Y.; Gao, S.; Zhang, W. The Strain Distribution Reconstructions Using GWO Algorithm and Verification by FBG Experimental Data. Appl. Sci. 2023, 13, 1259. [Google Scholar] [CrossRef]
- Alahmer, H.; Alahmer, A.; Alkhazaleh, R.; Alrbai, M.; Alamayreh, M.I. Applied Intelligent Grey Wolf Optimizer (IGWO) to Improve the Performance of CI Engine Running on Emulsion Diesel Fuel Blends. Fuels 2023, 4, 35–57. [Google Scholar] [CrossRef]
- Hossain, M.A.; Ahmed, A.; Tito, S.R.; Ahshan, R.; Sakib, T.H.; Nengroo, S.H. Multi-Objective Hybrid Optimization for Optimal Sizing of a Hybrid Renewable Power System for Home Applications. Energies 2023, 16, 96. [Google Scholar] [CrossRef]
- Ou, Y.; Yin, P.; Mo, L. An Improved Grey Wolf Optimizer and Its Application in Robot Path Planning. Biomimetics 2023, 8, 84. [Google Scholar] [CrossRef]
- ZainEldin, H.; Gamel, S.A.; El-Kenawy, E.-S.M.; Alharbi, A.H.; Khafaga, D.S.; Ibrahim, A.; Talaat, F.M. Brain Tumor Detection and Classification Using Deep Learning and Sine-Cosine Fitness Grey Wolf Optimization. Bioengineering 2023, 10, 18. [Google Scholar] [CrossRef] [PubMed]
- Rami Reddy, M.; Ravi Chandra, M.L.; Venkatramana, P.; Dilli, R. Energy-Efficient Cluster Head Selection in Wireless Sensor Networks Using an Improved Grey Wolf Optimization Algorithm. Computers 2023, 12, 35. [Google Scholar] [CrossRef]
- Abdullah, M.; Malik, T.N.; Ashraf, M.M.; Shah, M.A.; Iqbal, Q.; Sabir, M. Optimal Evaluation of Power System Harmonics in Smart Grid Based on Grey Wolf Optimizer. In Proceedings of the 2020 3rd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 29–30 January 2020; pp. 1–6. [Google Scholar]
- Babu, S.B.; Suneetha, A.; Babu, G.C.; Kumar, Y.J.N.; Karuna, G. Medical disease prediction using grey wolf optimization and auto encoder based recurrent neural network. Period. Eng. Nat. Sci. 2018, 6, 229–240. [Google Scholar] [CrossRef]
- Ayub, S.; Ayob, S.M.; Tan, C.W.; Arif, S.M.; Taimoor, M.; Aziz, L.; Bukar, A.L.; Al-Tashi, Q.; Ayop, R. Multi-Criteria Energy Management with Preference Induced Load Scheduling Using Grey Wolf Optimizer. Sustainability 2023, 15, 957. [Google Scholar] [CrossRef]
- Zhao, X.; Ren, S.; Quan, H.; Gao, Q. Routing Protocol for Heterogeneous Wireless Sensor Networks Based on a Modified Grey Wolf Optimizer. Sensors 2020, 20, 820. [Google Scholar] [CrossRef]
- Kohli, M.; Arora, S. Chaotic grey wolf optimization algorithm for constrained optimization problems. J. Comput. Des. Eng. 2018, 5, 458–472. [Google Scholar] [CrossRef]
- Gao, Z.-M.; Zhao, J. An improved grey wolf optimization algorithm with variable weights. Comput. Intell. Neurosci. 2019, 2019, 2981282. [Google Scholar] [CrossRef]
- Fadheel, B.A.; Wahab, N.I.A.; Mahdi, A.J.; Premkumar, M.; Radzi, M.A.B.M.; Soh, A.B.C.; Veerasamy, V.; Irudayaraj, A.X.R. A Hybrid Grey Wolf Assisted-Sparrow Search Algorithm for Frequency Control of RE Integrated System. Energies 2023, 16, 1177. [Google Scholar] [CrossRef]
- Lu, S.; Wang, H.; Zhao, G.; Zhou, G. Grey Wolf Particle Swarm Optimized Pump–Motor Servo System Constant Speed Control Strategy. Machines 2023, 11, 178. [Google Scholar] [CrossRef]
- He, M.; Hong, L.; Yang, Z.-Y.; Yang, T.-B.; Zeng, J. Bioactive assay and hyphenated chromatography detection for complex supercritical CO2 extract from Chaihu Shugan San using an experimental design approach. Microchem. J. 2018, 142, 394–402. [Google Scholar] [CrossRef]
- Li, H.; Liu, X.; Chen, Y.; Fan, Y. Testing for Serial Correlation in Autoregressive Exogenous Models with Possible GARCH Errors. Entropy 2022, 24, 1076. [Google Scholar] [CrossRef] [PubMed]
- Muftah, M.N.; Faudzi, A.A.M.; Sahlan, S.; Shouran, M. Modeling and Fuzzy FOPID Controller Tuned by PSO for Pneumatic Positioning System. Energies 2022, 15, 3757. [Google Scholar] [CrossRef]
- Khan, M.A.; Baig, D.-E.-Z.; Ashraf, B.; Ali, H.; Rashid, J.; Kim, J. Dynamic Modeling of a Nonlinear Two-Wheeled Robot Using Data-Driven Approach. Processes 2022, 10, 524. [Google Scholar] [CrossRef]
- Piñón, A.; Favela-Contreras, A.; Beltran-Carbajal, F.; Lozoya, C.; Dieck-Assad, G. Novel Strategy of Adaptive Predictive Control Based on a MIMO-ARX Model. Actuators 2022, 11, 21. [Google Scholar] [CrossRef]
- Nwadiuto, J.C.; Okuda, H.; Suzuki, T. Driving Behavior Modeling Based on Consistent Variable Selection in a PWARX Model. Appl. Sci. 2021, 11, 4938. [Google Scholar] [CrossRef]
- Tu, Q.; Rong, Y.; Chen, J. Parameter identification of ARX models based on modified momentum gradient descent algorithm. Complexity 2020, 2020, 9537075. [Google Scholar] [CrossRef]
- Ding, F.; Wang, F.; Xu, L.; Hayat, T.; Alsaedi, A. Parameter estimation for pseudo-linear systems using the auxiliary model and the decomposition technique. IET Control. Theory Appl. 2017, 11, 390–400. [Google Scholar] [CrossRef]
- Mehmood, K.; Chaudhary, N.I.; Khan, Z.A.; Cheema, K.M.; Raja, M.A.Z.; Milyani, A.H.; Azhari, A.A. Dwarf Mongoose Optimization Metaheuristics for Autoregressive Exogenous Model Identification. Mathematics 2022, 10, 3821. [Google Scholar] [CrossRef]
- Chaudhary, N.I.; Raja, M.A.Z.; He, Y.; Khan, Z.A.; Machado, J.T. Design of multi innovation fractional LMS algorithm for parameter estimation of input nonlinear control autoregressive systems. Appl. Math. Model. 2021, 93, 412–425. [Google Scholar] [CrossRef]
- Mehmood, K.; Chaudhary, N.I.; Khan, Z.A.; Raja, M.A.Z.; Cheema, K.M.; Milyani, A.H. Design of Aquila Optimization Heuristic for Identification of Control Autoregressive Systems. Mathematics 2022, 10, 1749. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, Q.; Liu, Y. Modified Kalman filtering based multi-step-length gradient iterative algorithm for ARX models with random missing outputs. Automatica 2020, 118, 109034. [Google Scholar] [CrossRef]
- Jing, S. Identification of an ARX model with impulse noise using a variable step size information gradient algorithm based on the kurtosis and minimum Renyi error entropy. Int. J. Robust Nonlinear Control. 2022, 32, 1672–1686. [Google Scholar] [CrossRef]
- Filipovic, V.Z. Outlier robust identification of dual-rate Hammerstein models in the presence of unmodeled dynamics. Int. J. Robust Nonlinear Control. 2022, 32, 1162–1179. [Google Scholar] [CrossRef]
- Ashar, N.D.B.K.; Yusoff, Z.M.; Ismail, N.; Hairuddin, M.A. ARX model identification for the real-time temperature process with Matlab-arduino implementation. ICIC Express Lett. 2020, 14, 103–111. [Google Scholar]
- Chaudhary, N.I.; Raja, M.A.Z.; Khan, Z.A.; Mehmood, A.; Shah, S.M. Design of fractional hierarchical gradient descent algorithm for parameter estimation of nonlinear control autoregressive systems. Chaos Solitons Fractals 2022, 157, 111913. [Google Scholar] [CrossRef]
- Malik, N.A.; Chaudhary, N.I.; Raja, M.A.Z. Firefly Optimization Heuristics for Sustainable Estimation in Power System Harmonics. Sustainability 2023, 15, 4816. [Google Scholar] [CrossRef]
- Satria, H.; Syah, R.B.Y.; Nehdi, M.L.; Almustafa, M.K.; Adam, A.O.I. Parameters Identification of Solar PV Using Hybrid Chaotic Northern Goshawk and Pattern Search. Sustainability 2023, 15, 5027. [Google Scholar] [CrossRef]
- Fuchs, F.G.; Lye, K.O.; Møll Nilsen, H.; Stasik, A.J.; Sartor, G. Constraint Preserving Mixers for the Quantum Approximate Optimization Algorithm. Algorithms 2022, 15, 202. [Google Scholar] [CrossRef]
- Haseeb, A.; Waleed, U.; Ashraf, M.M.; Siddiq, F.; Rafiq, M.; Shafique, M. Hybrid Weighted Least Square Multi-Verse Optimizer (WLS–MVO) Framework for Real-Time Estimation of Harmonics in Non-Linear Loads. Energies 2023, 16, 609. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Parameter |
|---|---|
| GWO | , decreases linearly to 0 |
| AGWO | , decreases non-linearly to 0 |
| CGWO | , decreases linearly to 0 with the chaotic map given in (25) |
| ICGWO | , decreases non-linearly to 0 with the chaotic map given in (25) |
| Methods | Parameters | Best Fitness | |||||
|---|---|---|---|---|---|---|---|
| GWO | 200 | 10 | −1.5201 | 0.6553 | 0.2973 | 0.2588 | 0.00409 |
| 30 | −1.5418 | 0.6695 | 0.2617 | 0.2880 | 0.00232 | ||
| 500 | 10 | −1.5435 | 0.6772 | 0.2232 | 0.3523 | 0.00235 | |
| 30 | −1.5542 | 0.6810 | 0.2287 | 0.3179 | 0.00219 | ||
| AGWO | 200 | 10 | −1.4913 | 0.6427 | 0.2357 | 0.3969 | 0.00428 |
| 30 | −1.5459 | 0.6733 | 0.2059 | 0.3416 | 0.00229 | ||
| 500 | 10 | −1.5658 | 0.6916 | 0.2346 | 0.3067 | 0.00228 | |
| 30 | −1.5339 | 0.6619 | 0.2320 | 0.3209 | 0.00218 | ||
| CGWO | 200 | 10 | −1.5785 | 0.7069 | 0.2165 | 0.3121 | 0.00293 |
| 30 | −1.5304 | 0.6617 | 0.2482 | 0.3239 | 0.00223 | ||
| 500 | 10 | −1.5496 | 0.6705 | 0.2117 | 0.2990 | 0.00285 | |
| 30 | −1.5517 | 0.6775 | 0.2176 | 0.3160 | 0.00231 | ||
| ICGWO | 200 | 10 | −1.5363 | 0.6676 | 0.3003 | 0.2620 | 0.00294 |
| 30 | −1.5345 | 0.6664 | 0.2631 | 0.3037 | 0.00226 | ||
| 500 | 10 | −1.5363 | 0.6675 | 0.2230 | 0.3278 | 0.00241 | |
| 30 | −1.5495 | 0.6806 | 0.2308 | 0.3242 | 0.00222 | ||
| True Parameters | −1.5300 | 0.6600 | 0.2500 | 0.3000 | 0 | ||
| Methods | Parameters | Best Fitness | |||||
|---|---|---|---|---|---|---|---|
| GWO | 200 | 10 | −1.5547 | 0.6779 | 0.2139 | 0.3290 | 0.00886 |
| 30 | −1.559 | 0.6862 | 0.2218 | 0.3388 | 0.00879 | ||
| 500 | 10 | −1.5729 | 0.6983 | 0.2152 | 0.3265 | 0.00884 | |
| 30 | −1.5298 | 0.6582 | 0.2119 | 0.3581 | 0.00875 | ||
| AGWO | 200 | 10 | −1.5088 | 0.6453 | 0.2003 | 0.3967 | 0.00899 |
| 30 | −1.5602 | 0.6902 | 0.2292 | 0.3390 | 0.00867 | ||
| 500 | 10 | −1.5698 | 0.6989 | 0.2378 | 0.3221 | 0.00881 | |
| 30 | −1.5425 | 0.6681 | 0.2086 | 0.3481 | 0.00878 | ||
| CGWO | 200 | 10 | −1.5740 | 0.7116 | 0.2677 | 0.3247 | 0.00975 |
| 30 | −1.5661 | 0.6938 | 0.2319 | 0.3349 | 0.00892 | ||
| 500 | 10 | −1.5030 | 0.6384 | 0.2214 | 0.3758 | 0.00892 | |
| 30 | −1.5507 | 0.6806 | 0.2144 | 0.3549 | 0.00861 | ||
| ICGWO | 200 | 10 | −1.5907 | 0.7213 | 0.2108 | 0.3339 | 0.00975 |
| 30 | −1.5511 | 0.6785 | 0.2473 | 0.3088 | 0.00881 | ||
| 500 | 10 | −1.5486 | 0.6831 | 0.2512 | 0.3257 | 0.00889 | |
| 30 | −1.5317 | 0.6641 | 0.2405 | 0.3409 | 0.00863 | ||
| True Parameters | −1.5300 | 0.6600 | 0.2500 | 0.3000 | 0 | ||
| Methods | Parameters | Best Fitness | |||||
|---|---|---|---|---|---|---|---|
| GWO | 200 | 10 | −1.5511 | 0.6743 | 0.2067 | 0.3709 | 0.02077 |
| 30 | −1.5597 | 0.6875 | 0.2056 | 0.3773 | 0.01984 | ||
| 500 | 10 | −1.5266 | 0.6530 | 0.2330 | 0.3289 | 0.02018 | |
| 30 | −1.5427 | 0.6776 | 0.2099 | 0.3823 | 0.01940 | ||
| AGWO | 200 | 10 | −1.5655 | 0.6914 | 0.1608 | 0.3953 | 0.01997 |
| 30 | −1.5164 | 0.6568 | 0.2318 | 0.3900 | 0.01959 | ||
| 500 | 10 | −1.5524 | 0.6787 | 0.2076 | 0.3679 | 0.01975 | |
| 30 | −1.5420 | 0.6715 | 0.2111 | 0.3621 | 0.01943 | ||
| CGWO | 200 | 10 | −1.5034 | 0.6401 | 0.2316 | 0.3693 | 0.01994 |
| 30 | −1.5457 | 0.6790 | 0.2354 | 0.3592 | 0.01944 | ||
| 500 | 10 | −1.5394 | 0.6723 | 0.1991 | 0.3866 | 0.01938 | |
| 30 | −1.5129 | 0.6483 | 0.2231 | 0.3865 | 0.01951 | ||
| ICGWO | 200 | 10 | −1.5041 | 0.6408 | 0.1903 | 0.4027 | 0.02031 |
| 30 | −1.5163 | 0.6495 | 0.2248 | 0.3755 | 0.01953 | ||
| 500 | 10 | −1.5496 | 0.6803 | 0.2131 | 0.3565 | 0.01958 | |
| 30 | −1.5382 | 0.6739 | 0.1925 | 0.4079 | 0.01946 | ||
| True Parameters | −1.5300 | 0.6600 | 0.2500 | 0.3000 | 0 | ||
| Methods | Parameters | Best Fitness | |||||
|---|---|---|---|---|---|---|---|
| GWO | 200 | 10 | −1.5064 | 0.6478 | 0.2525 | 0.3872 | 0.03496 |
| 30 | −1.5504 | 0.6782 | 0.1934 | 0.3844 | 0.03470 | ||
| 500 | 10 | −1.5498 | 0.6788 | 0.1838 | 0.3972 | 0.03464 | |
| 30 | −1.5342 | 0.6703 | 0.2040 | 0.4188 | 0.03446 | ||
| AGWO | 200 | 10 | −1.5016 | 0.6498 | 0.2500 | 0.4098 | 0.03550 |
| 30 | −1.5572 | 0.6877 | 0.2002 | 0.3906 | 0.03461 | ||
| 500 | 10 | −1.5637 | 0.6967 | 0.2228 | 0.3752 | 0.03483 | |
| 30 | −1.5370 | 0.6689 | 0.1895 | 0.4069 | 0.03444 | ||
| CGWO | 200 | 10 | −1.4745 | 0.6126 | 0.1896 | 0.4320 | 0.03577 |
| 30 | −1.5228 | 0.6583 | 0.1983 | 0.4179 | 0.03437 | ||
| 500 | 10 | −1.5052 | 0.6419 | 0.2009 | 0.4272 | 0.03460 | |
| 30 | −1.5305 | 0.6617 | 0.1899 | 0.4073 | 0.03449 | ||
| ICGWO | 200 | 10 | −1.5753 | 0.7045 | 0.1642 | 0.4106 | 0.03520 |
| 30 | −1.5329 | 0.6646 | 0.1877 | 0.4102 | 0.03445 | ||
| 500 | 10 | −1.5610 | 0.6916 | 0.1865 | 0.4064 | 0.03470 | |
| 30 | −1.5261 | 0.6627 | 0.2060 | 0.4179 | 0.03440 | ||
| True Parameters | −1.5300 | 0.6600 | 0.2500 | 0.3000 | 0 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mehmood, K.; Chaudhary, N.I.; Khan, Z.A.; Cheema, K.M.; Raja, M.A.Z. Variants of Chaotic Grey Wolf Heuristic for Robust Identification of Control Autoregressive Model. Biomimetics 2023, 8, 141. https://doi.org/10.3390/biomimetics8020141
Mehmood K, Chaudhary NI, Khan ZA, Cheema KM, Raja MAZ. Variants of Chaotic Grey Wolf Heuristic for Robust Identification of Control Autoregressive Model. Biomimetics. 2023; 8(2):141. https://doi.org/10.3390/biomimetics8020141
Chicago/Turabian StyleMehmood, Khizer, Naveed Ishtiaq Chaudhary, Zeshan Aslam Khan, Khalid Mehmood Cheema, and Muhammad Asif Zahoor Raja. 2023. "Variants of Chaotic Grey Wolf Heuristic for Robust Identification of Control Autoregressive Model" Biomimetics 8, no. 2: 141. https://doi.org/10.3390/biomimetics8020141
APA StyleMehmood, K., Chaudhary, N. I., Khan, Z. A., Cheema, K. M., & Raja, M. A. Z. (2023). Variants of Chaotic Grey Wolf Heuristic for Robust Identification of Control Autoregressive Model. Biomimetics, 8(2), 141. https://doi.org/10.3390/biomimetics8020141