
Novel Approach to Ensure Safe Power Supply for Safety-Relevant Consumers



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
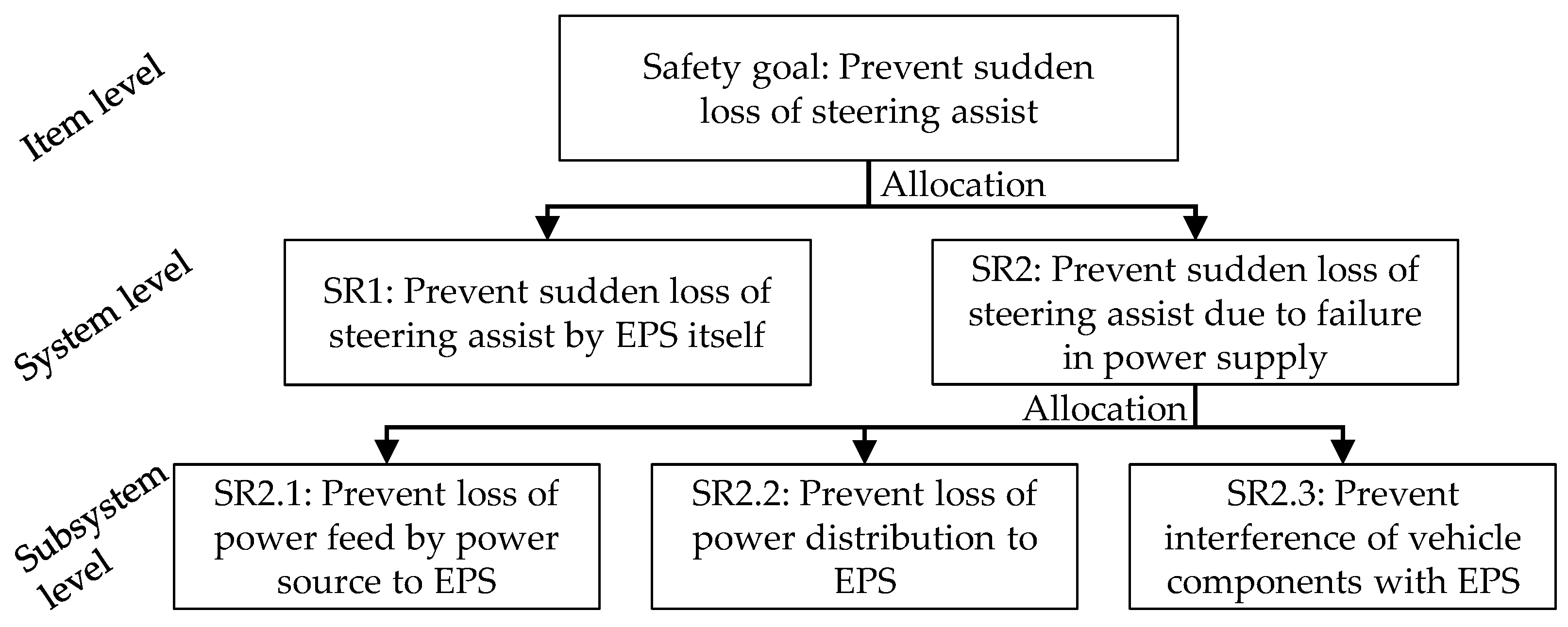
1.1. Powernet Requirements
- Safety requirement 2.1 Power feed: The power sources and storage can provide sufficient power for the EPS.
- Safety requirement 2.2 Power distribution: The provided power is safely transmitted from the power feed to the EPS.
- Safety requirement 2.3 Freedom from interference: Failure in the powernet may not lead to a fault of the EPS.
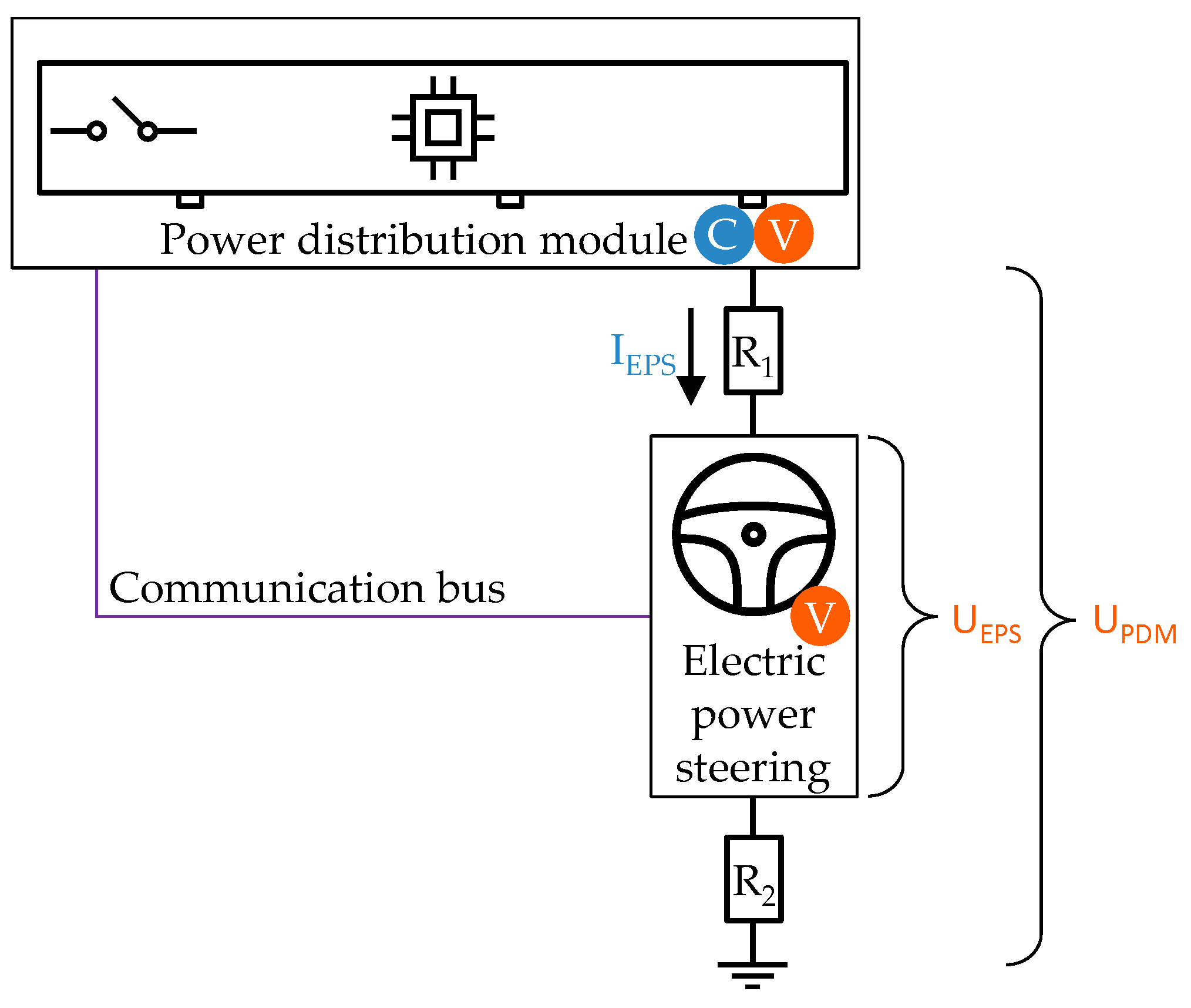
1.2. Powernet Architecture
1.3. State of the Art
1.3.1. Dimensioning
1.3.2. Insufficient Power Supply
2. Methods
2.1. Novel Approach
2.1.1. Safety-Relevant Section of Powernet
2.1.2. Wiring Harness Diagnostics
2.1.3. Battery Diagnostics
2.1.4. State of Function Powernet
2.2. Validation of SOFPN
2.2.1. Simulation Models
2.2.2. Configuration of SOFPN
3. Results
3.1. Simulation Results
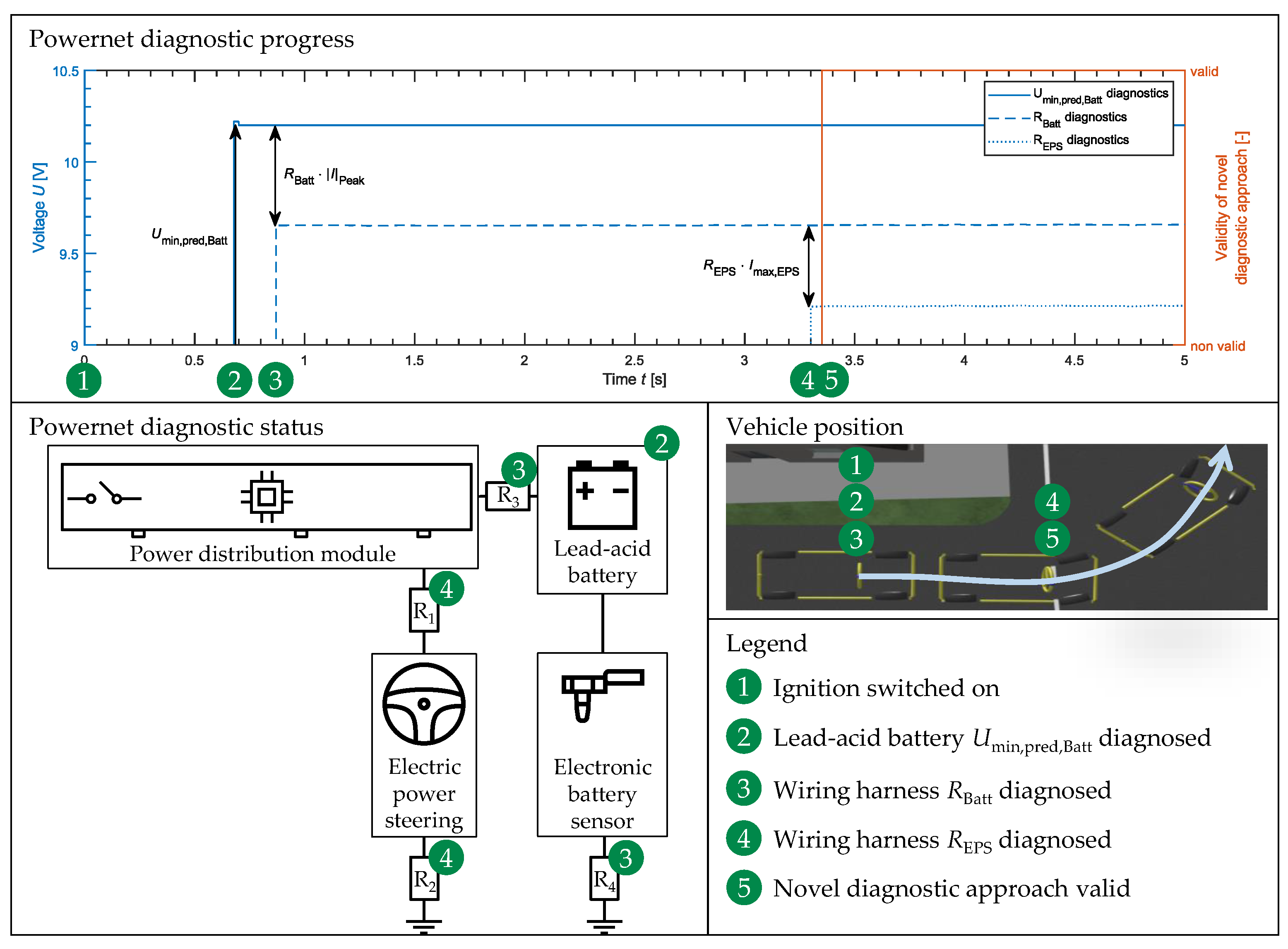
3.1.1. Simulation at the Start of Drive Cycle
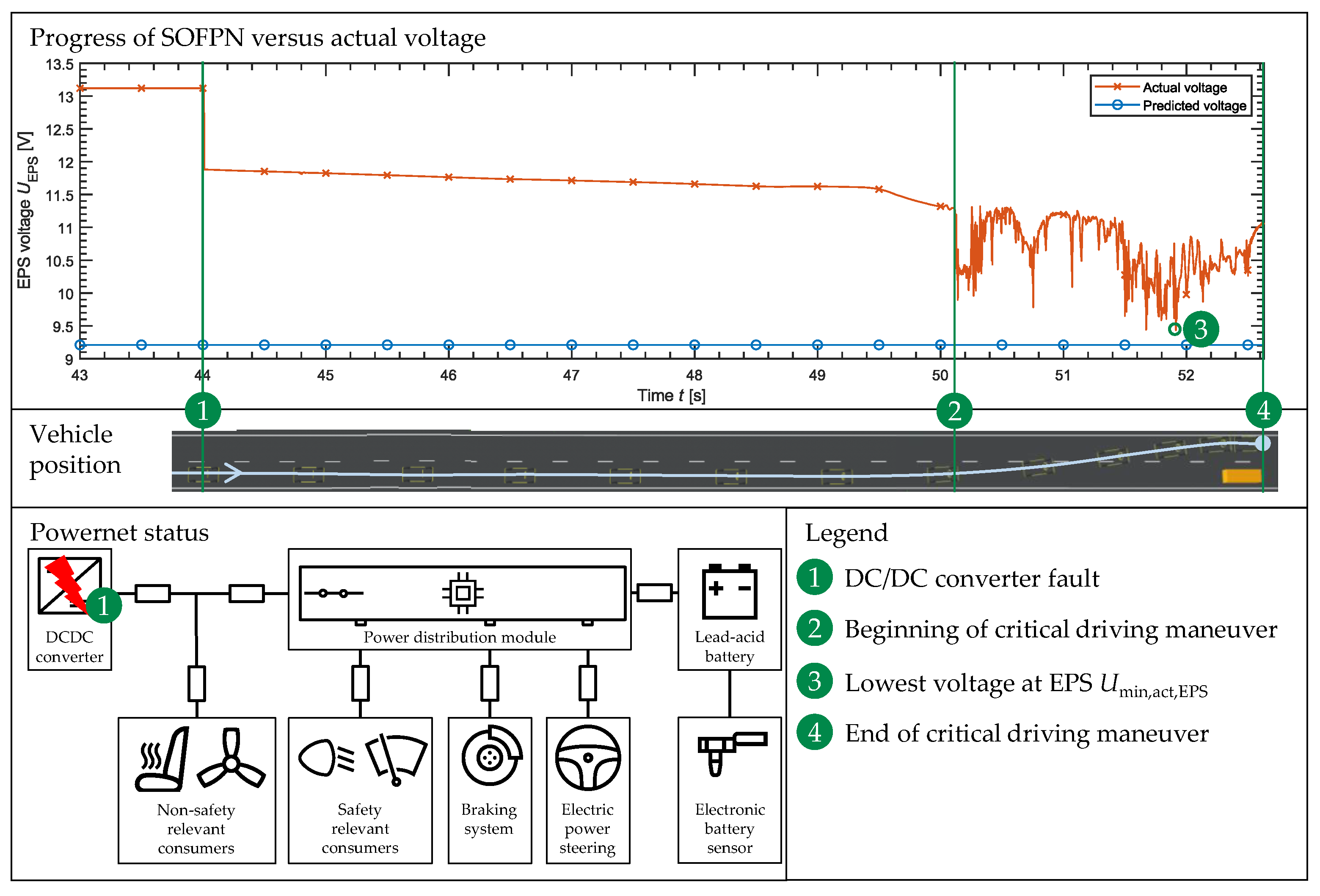
3.1.2. Simulation of Critical Driving Maneuver
- The individual diagnostics are always conservative. This can prevent influencing variables, such as measurement accuracy, causing the supply of the EPS to be falsely diagnosed as safe.
- The base duration of the predefined current profile in Figure 7 lasts longer than is required in the driving maneuver.
- The voltage at the EPS and brake system is already below the nominal voltage range. This causes the systems to reduce the power demand by itself. This mechanism provides increased voltage stability in critical situations. Such derating results in a lower current demand, concluding in a less demanding peak load and maximum EPS current than in the predefined current profile in Figure 7.
3.2. Advantages by Using SOFPN
3.2.1. Increased Availability
- The wiring harness and battery are in good condition. Neither approaches give a warning, and it is safe to perform the critical driving maneuver.
- The wiring harness is in bad state. The SOFPN issues a warning. The driving maneuver cannot be performed safely because the voltage at the EPS could drop below 8 V. However, there is no warning according to the state of the art. Thus, there is a risk of fault of the EPS during a critical driving maneuver.
- Due to a bad state of the battery, a severe voltage drop at the battery is to be expected. According to the state of the art, a warning would be issued. However, due to the low voltage drop across the wiring harness, no fault of the EPS is to be expected during a critical driving maneuver. This means that a warning would be issued according to the state of the art and no warning would be reported by the SOFPN. As a result, availability can be increased by using the SOFPN in these powernet conditions.
- Both approaches correctly issue a warning.
3.2.2. Miniaturization
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SR | Safety requirements |
| EPS | Electric power steering |
| PDM | Power distribution module |
| SOFPN | State of function powernet |
| Batt | Battery |
| WH | Wiring harness |
| Pred | Predicted |
| Act | Actual |
| Nom | Nominal |
References
- Koehler, A.; Bertsche, B. An Approach of Fail Operational Power Supply for Next Generation Vehicle Powernet Architectures. In Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference, Venice, Italy, 1–5 November 2020; Baraldi, P., Di Maio, F., Zio, E., Eds.; Research Publishing Service: Singapore, 2020; pp. 60–67. [Google Scholar]
- Kilian, P.; Kohler, A.; van Bergen, P.; Gebauer, C.; Pfeufer, B.; Koller, O.; Bertsche, B. Principle Guidelines for Safe Power Supply Systems Development. IEEE Access 2021, 6, 107751–107766. [Google Scholar] [CrossRef]
- Standard ISO 16750-2; Road Vehicles—Environmental Conditions and Testing for Electrical and Electronic Equipment—Part 2: Electrical Loads. European Standards: Brussels, Belgium, 2012; Volume 11.
- Brabetz, L.; Ayeb, M.; Lehmann, J.; Loewer, B. Evaluation of Future Topologies and Architectures for High-Reliability Electrical Distribution Systems. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 4, 2347–2355. [Google Scholar]
- Ruf, F.; Schill, M.M.; Barthels, A.; Kohler, T.P.; Michel, H.; Froeschl, J.; Herzog, H. Topology and Design Optimization of a 14 V Automotive Power Net Using a Modified Discrete PSO in a Physical Simulation. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–7. [Google Scholar]
- Standard ISO 26262-3:2018; Road Vehicles—Functional Safety—Part 3: Concept Phase. European Standards: Brussels, Belgium, 2018; Volume 12.
- Ruf, F. Auslegung und Topologieoptimierung von Spannungsstabilen Energiebordnetzen. Ph.D. Thesis, Technical University, Munich, Germany, 17 December 2015. [Google Scholar]
- Bayern Innovativ. Failure Rates for Automotive Wiring System Components—Expected Values and Conditions. Available online: https://www.bayern-innovativ.de/en/page/working-group-and-guide-asil-metrics-in-the-on-board-network (accessed on 10 May 2022).
- Bierwirth, F.; Froeschl, J.; Gebert, J.; Herzog, H. Determining Vehicle Energy Paths’ Remaining Useful Life using Design of Experiments. In Proceedings of the Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 September 2020; pp. 1–7. [Google Scholar]
- Conradt, R.; Heidinger, F.; Birke, K.P. Methodology for Determining Time-Dependent Lead Battery Failure Rates from Field Data. Batteries 2021, 7, 39. [Google Scholar] [CrossRef]
- Gehring, R. Beitrag zur Untersuchung und Erhöhung der Spannungsstabilität des Elektrischen Energiebordnetzes im Kraftfahrzeug. Ph.D. Thesis, Technical University, Munich, Germany, 26 November 2013. [Google Scholar]
- Schoch, E.; Koenigsmann, M.; Kizler, J.; Schmucker, C.; Kronenberg, B.; Bremmer, M.; Schoettle, R.; Ruch, M. Monitoring techniques for 12-V lead-acid batteries in automobiles. In Lead-Acid Batteries for Future Automobiles; Garche, J., Karden, E., Moseley, P.T., Rand, D.A.J., Eds.; Elsevier: Amsterdam, The Netherlands, 2017; pp. 415–442. [Google Scholar]
- Pfeffer, P.; Harrer, M. Lenkungshandbuch, 2nd ed.; Springer Fachmedien: Wiesbaden, Germany, 2013; pp. 347–409. [Google Scholar]
- Hohmann, M. Ein Synthetischer Ansatz zur Auslegung von Kfz-Bordnetzen unter Berücksichtigung Dynamischer Belastungsvorgänge. Ph.D. Thesis, Technical University, Ilmenau, Germany, 9 December 2010. [Google Scholar]
- Bierwirth, F.; Grottenthaler, Y.; Tippe, L.; Taube, J.; Froeschl, J.; Gebert, J.; Herzog, H. Predictive Diagnosis of E-Fuse-Protected Supply Paths in Vehicle Low-Voltage Energy Systems. In Proceedings of the International Conference on Electric and Electronic Systems in Hybrid and Electric Vehicles and Electrical Energy Management (EEHE), Essen, Germany, 8–9 November 2021. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Braun, L.; Le, M.; Motz, J.; Birke, K.P. Novel Approach to Ensure Safe Power Supply for Safety-Relevant Consumers. Batteries 2022, 8, 47. https://doi.org/10.3390/batteries8050047
Braun L, Le M, Motz J, Birke KP. Novel Approach to Ensure Safe Power Supply for Safety-Relevant Consumers. Batteries. 2022; 8(5):47. https://doi.org/10.3390/batteries8050047
Chicago/Turabian StyleBraun, Lars, Minh Le, Jürgen Motz, and Kai Peter Birke. 2022. "Novel Approach to Ensure Safe Power Supply for Safety-Relevant Consumers" Batteries 8, no. 5: 47. https://doi.org/10.3390/batteries8050047
APA StyleBraun, L., Le, M., Motz, J., & Birke, K. P. (2022). Novel Approach to Ensure Safe Power Supply for Safety-Relevant Consumers. Batteries, 8(5), 47. https://doi.org/10.3390/batteries8050047