


Combining Recurrent Neural Network and Sigmoid Growth Models for Short-Term Temperature Forecasting and Tomato Growth Prediction in a Plastic Greenhouse

 , , ,
, , ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Greenhouse #1 Specification and Measurements

2.2. Greenhouse #2 Specification, Measurements, and Tomato Growth Data Collection
2.3. RNN Architectures for the Temperature Forecasting Model
2.3.1. Long Short-Term Memory (LSTM)
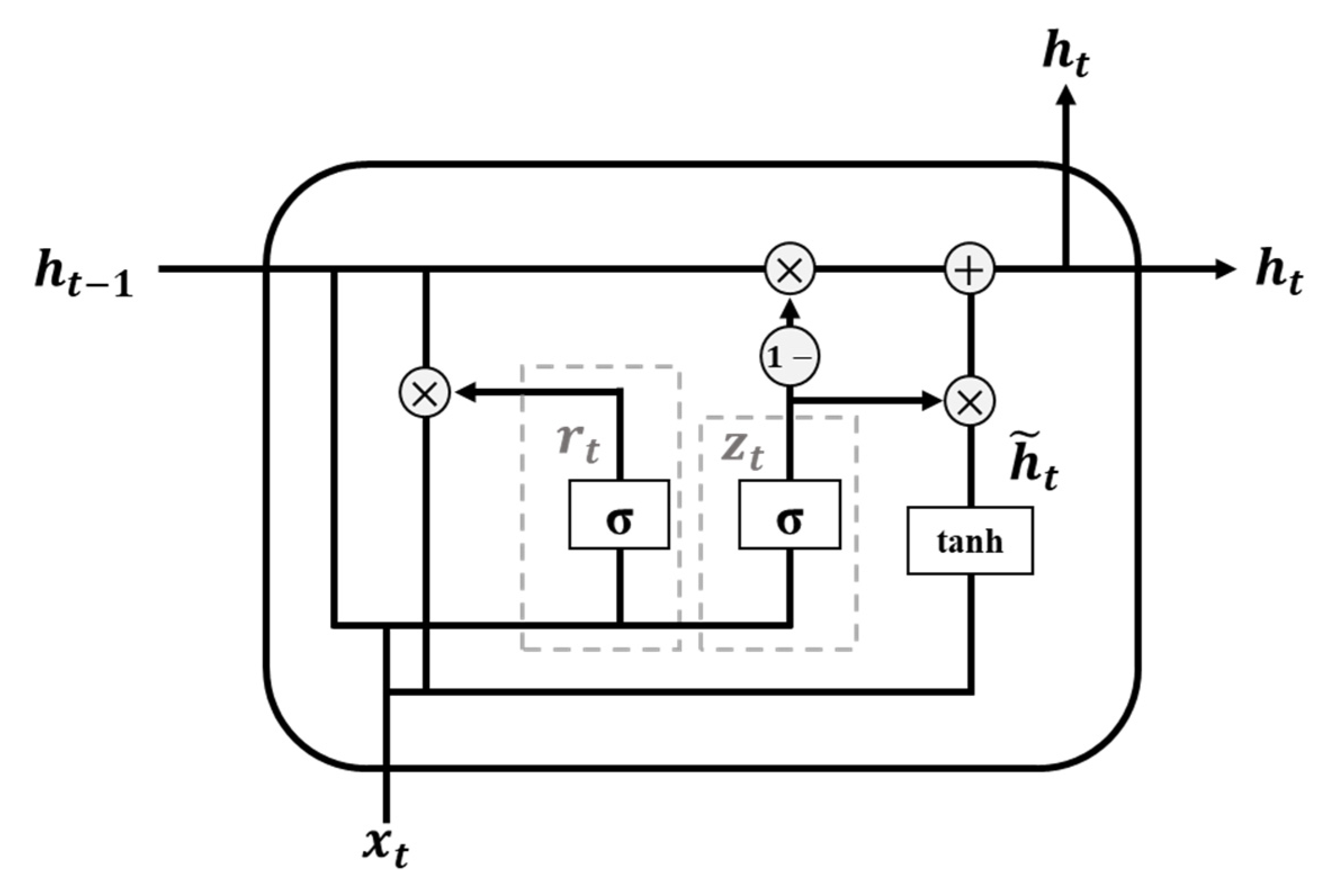
2.3.2. Gated Recurrent Unit (GRU)
2.3.3. Bi-Directional LSTM (BILSTM)
2.3.4. Climate Data Preprocessing and Model Hyperparameter Settings
2.3.5. Evaluation Metrics of Temperature Forecasting Model
2.4. Sigmoid Model for Predicting Greenhouse Tomato Growth
2.5. Data Analysis Software
3. Results and Discussion
3.1. Performance Evaluation of Temperature Forecasting Model
3.2. Comparison of Daily Mean Temperature and GDD between Predicted and Observed Values
3.3. Sigmoid Growth Model for Greenhouse Tomato Production
3.4. Limitations of Present Study and Suggestions for Future Works
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, H.; Wang, S. Technology and studies for greenhouse cooling. World J. Eng. Technol. 2015, 3, 73–77. [Google Scholar] [CrossRef]
- Singh, M.C.; Yousuf, A.; Singh, J.P. Greenhouse microclimate modeling under cropped conditions—A review. Res. Environ. Life Sci. 2016, 9, 1552–1557. [Google Scholar]
- Escamilla-Garcia, A.; Soto-Zarazúa, G.M.; Toledano-Ayala, M.; Rivas-Araiza, E.; Gastélum-Barrios, A. Applications of artificial neural networks in greenhouse technology and overview for smart agriculture development. Appl. Sci. 2020, 10, 3835. [Google Scholar] [CrossRef]
- Ma, D.; Carpenter, N.; Maki, H.; Rehman, T.U.; Tuinstra, M.R.; Jin, J. Greenhouse environment modeling and simulation for microclimate control. Comput. Electron. Agric. 2019, 162, 134–142. [Google Scholar] [CrossRef]
- Frausto, H.U.; Pieters, J.G. Modelling greenhouse temperature using system identification by means of neural networks. Neurocomputing 2004, 56, 423–428. [Google Scholar] [CrossRef]
- Pawlowski, A.; Guzmán, J.L.; Rodríguez, F.; Berenguel, M.; Sanchez, J.; Dormido, S. Event-based control and wireless sensor network for greenhouse diurnal temperature control: A simulated case study. In Proceedings of the 2008 IEEE International Conference on Emerging Technologies and Factory Automation (EFTA), Hamburg, Germany, 15–18 September 2008; pp. 500–507. [Google Scholar] [CrossRef]
- Petrakis, T.; Kavga, A.; Thomopoulos, V.; Argiriou, A.A. Neural network model for greenhouse microclimate predictions. Agriculture 2022, 12, 780. [Google Scholar] [CrossRef]
- Katzin, D.; van Henten, E.J.; van Mourik, S. Process-based greenhouse climate models: Genealogy, current status, and future directions. Agric. Syst. 2022, 198, 103388. [Google Scholar] [CrossRef]
- Ali, R.B.; Bouadila, S.; Mami, A. Experimental validation of the dynamic thermal behavior of two types of agricultural greenhouses in the Mediterranean context. Renew. Energy 2020, 147, 118–129. [Google Scholar] [CrossRef]
- Pawlowski, A.; Sánchez-Molina, J.A.; Guzmán, J.L.; Rodríguez, F.; Dormido, S. Evaluation of event-based irrigation system control scheme for tomato crops in greenhouses. Agric. Water Manag. 2017, 183, 16–25. [Google Scholar] [CrossRef]
- Wang, L.; Li, X.; Xu, M.; Guo, Z.; Wang, B. Study on optimization model control method of light and temperature coordination of greenhouse crops with benefit priority. Comput. Electron. Agric. 2023, 210, 107892. [Google Scholar] [CrossRef]
- Ehret, D.L.; Hill, B.D.; Helmer, T.; Edwards, D.R. Neural network modeling of greenhouse tomato yield, growth and water use from automated crop monitoring data. Comput. Electron. Agric. 2011, 79, 82–89. [Google Scholar] [CrossRef]
- Küçükönder, H.; Boyaci, S.; Akyüz, A. A modeling study with an artificial neural network: Developing estimation models for the tomato plant leaf area. Turk. J. Agric. For. 2016, 40, 203–212. [Google Scholar] [CrossRef]
- Pandey, S.K.; Janghel, R.R. Recent deep learning techniques, challenges and its applications for medical healthcare system: A review. Neural Process. Lett. 2019, 50, 1907–1935. [Google Scholar] [CrossRef]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar] [CrossRef]
- Elhariri, E.; Taie, S.A. H-ahead multivariate microclimate forecasting system based on deep learning. In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 2–4 February 2019; pp. 168–173. [Google Scholar] [CrossRef]
- Jung, D.H.; Kim, H.S.; Jhin, C.; Kim, H.J.; Park, S.H. Time-serial analysis of deep neural network models for prediction of climatic conditions inside a greenhouse. Comput. Electron. Agric. 2020, 173, 105402. [Google Scholar] [CrossRef]
- Yao, M.-H.; Wang, H.-C.; Chiu, Y.-W.; Hsieh, H.-C.; Chang, T.-H.; Lee, Y.-J. Integrating microweather forecasts and crop physiological indicators for greenhouse environmental control. Acta Hortic. 2021, 1327, 445–454. [Google Scholar] [CrossRef]
- Hao, X.; Liu, Y.; Pei, L.; Li, W.; Du, Y. Atmospheric temperature prediction based on a BiLSTM-Attention model. Symmetry 2022, 14, 2470. [Google Scholar] [CrossRef]
- Vijayakumar, A.; Beena, R. Impact of temperature difference on the physicochemical properties and yield of tomato: A review. Chem. Sci. Rev. Lett. 2020, 9, 665–681. [Google Scholar]
- McMaster, G.S.; Wilhelm, W.W. Growing degree-days: One equation, two interpretations. Agric. For. Meteorol. 1997, 87, 291–300. [Google Scholar] [CrossRef]
- Cao, L.; Shi, P.J.; Li, L.; Chen, G. A new flexible sigmoidal growth model. Symmetry 2019, 11, 204. [Google Scholar] [CrossRef]
- Archontoulis, S.V.; Miguez, F.E. Nonlinear regression models and applications in agricultural research. Agron. J. 2015, 107, 786–798. [Google Scholar] [CrossRef]
- Zeide, B. Analysis of growth equations. For. Sci. 1993, 39, 594–616. [Google Scholar] [CrossRef]
- Fang, S.-L.; Kuo, Y.-H.; Kang, L.; Chen, C.-C.; Hsieh, C.-Y.; Yao, M.-H.; Kuo, B.-J. Using sigmoid growth models to simulate greenhouse tomato growth and development. Horticulturae 2022, 8, 1021. [Google Scholar] [CrossRef]
- Meade, K.A.; Cooper, M.; Beavis, W.D. Modeling biomass accumulation in maize kernels. Field Crops Res. 2013, 151, 92–100. [Google Scholar] [CrossRef]
- Wu, Y.; Yan, S.; Fan, J.; Zhang, F.; Xiang, Y.; Zheng, J.; Guo, J. Responses of growth, fruit yield, quality and water productivity of greenhouse tomato to deficit drip irrigation. Sci. Hortic. 2021, 275, 109710. [Google Scholar] [CrossRef]
- Hsieh, C.-Y.; Fang, S.-L.; Wu, Y.-F.; Chu, Y.-C.; Kuo, B.-J. Using sigmoid growth curves to establish growth models of tomato and eggplant stems suitable for grafting in subtropical countries. Horticulturae 2021, 7, 537. [Google Scholar] [CrossRef]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A search space odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2222–2232. [Google Scholar] [CrossRef] [PubMed]
- Van Laarhoven, T. L2 regularization versus batch and weight normalization. arXiv 2017, arXiv:1706.05350. [Google Scholar] [CrossRef]
- Hinton, G.E.; Srivastava, N.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R.R. Improving neural networks by preventing co-adaptation of feature detectors. arXiv 2012, arXiv:1207.0580. [Google Scholar] [CrossRef]
- Esparza-Gómez, J.M.; Luque-Vega, L.F.; Guerrero-Osuna, H.A.; Carrasco-Navarro, R.; García-Vázquez, F.; Mata-Romero, M.E.; Olvera-Olvera, C.A.; Carlos-Mancilla, M.A.; Solís-Sánchez, L.O. Long short-term memory recurrent neural network and extreme gradient boosting algorithms applied in a greenhouse’s internal temperature prediction. Appl. Sci. 2023, 13, 12341. [Google Scholar] [CrossRef]
- Verhulst, P.F. A note on population growth. Corresp. Math. Phys. 1838, 10, 113–121. [Google Scholar]
- Gompertz, B. On the nature of the function expressive of the law of human mortality, and on a new mode of determining the value of life contingencies. Philos. Trans. R. Soc. 1825, 115, 513–585. [Google Scholar] [CrossRef]
- Ritz, C.; Strebig, J.C. Package ‘drc’. Title Analysis of Dose-Response Curves. 2016. Available online: https://cran.r-project.org/web/packages/drc/drc.pdf (accessed on 1 February 2024).
- Seginer, I. Some artificial neural network applications to greenhouse environmental control. Comput. Electron. Agric. 1997, 18, 167–186. [Google Scholar] [CrossRef]
- Dariouchy, A.; Aassif, E.; Lekouch, K.; Bouirden, L.; Maze, G. Prediction of the intern parameters tomato greenhouse in a semi-arid area using a time-series model of artificial neural networks. Measurement 2009, 42, 456–463. [Google Scholar] [CrossRef]
- Hu, H.G.; Xu, L.H.; Wei, R.H.; Zhu, B.K. RBF network based nonlinear model reference adaptive PD controller design for greenhouse climate. Int. J. Adv. Comput. Technol. 2011, 3, 357–366. [Google Scholar] [CrossRef][Green Version]
- Cho, W.; Kim, S.; Na, M.; Na, I. Forecasting of tomato yields using attention-based LSTM network and ARMA model. Electronics 2021, 10, 1576. [Google Scholar] [CrossRef]
- Gong, L.; Yu, M.; Jiang, S.; Cutsuridis, V.; Pearson, S. Deep learning based prediction on greenhouse crop yield combined TCN and RNN. Sensors 2021, 21, 4537. [Google Scholar] [CrossRef]
- Goyal, P.; Kumar, S.; Sharda, R. A review of the Artificial Intelligence (AI) based techniques for estimating reference evapotranspiration: Current trends and future perspectives. Comput. Electron. Agric. 2023, 209, 107836. [Google Scholar] [CrossRef]
- Pathak, T.B.; Stoddard, C.S. Climate change effects on the processing tomato growing season in California using growing degree day model. Model. Earth Syst. Environ. 2018, 4, 765–775. [Google Scholar] [CrossRef]
- Martínez-Ruiz, A.; López-Cruz, I.L.; Ruiz-García, A.; Pineda-Pineda, J.; Prado-Hernández, J.V. HortSyst: A dynamic model to predict growth, nitrogen uptake, and transpiration of greenhouse tomatoes. Chil. J. Agric. Res. 2019, 79, 89–102. [Google Scholar] [CrossRef]
- Badji, A.; Benseddik, A.; Bensaha, H.; Boukhelifa, A.; Hasrane, I. Design, technology, and management of greenhouse: A review. J. Clean. Prod. 2022, 373, 133753. [Google Scholar] [CrossRef]
- Rodríguez, F.; Berenguel, M.; Guzmán, J.L.; Ramírez-arias, A. Modeling and Control of Greenhouse Crop Growth; Springer: Berlin/Heidelberg, Germany, 2014; ISBN 9783319111339. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Name | Structure |
|---|---|
| LSTM1 | One-layer LSTM and one dense layer |
| LSTM2 | Two-layer LSTM and one dense layer |
| LSTM3 | Three-layer LSTM and one dense layer |
| GRU1 | One-layer GRU and one dense layer |
| GRU2 | Two-layer GRU and one dense layer |
| GRU3 | Three-layer GRU and one dense layer |
| BILSTM1 | One-layer BILSTM and one dense layer |
| BILSTM2 | Two-layer BILSTM and one dense layer |
| BILSTM3 | Three-layer BILSTM and one dense layer |
| Model | Number of Hidden Units | R2 | MAPE (%) | RMSE (°C) |
|---|---|---|---|---|
| LSTM1 | 170 | 0.961 | 3.429 | 1.210 |
| LSTM2 | 190 | 0.962 | 3.216 | 1.196 |
| LSTM3 | 190 | 0.958 | 3.403 | 1.254 |
| GRU1 | 20 | 0.961 | 3.490 | 1.215 |
| GRU2 | 60 | 0.964 | 3.279 | 1.157 |
| GRU3 | 160 | 0.958 | 3.676 | 1.249 |
| BILSTM1 | 180 | 0.960 | 3.383 | 1.227 |
| BILSTM2 | 170 | 0.954 | 3.596 | 1.316 |
| BILSTM3 | 110 | 0.958 | 3.382 | 1.259 |
| Growth Trait | Temperature Data | |||
|---|---|---|---|---|
| LAI | Observed GDDs | 1.5345 | 2.9658 | 0.0039 |
| Predicted GDDs | 1.5229 | 2.9487 | 0.0038 | |
| (0.76%) | (0.58%) | (2.56%) | ||
| Fresh fruit weight | Observed GDDs | 1006.0000 | 13.0300 | 0.0148 |
| Predicted GDDs | 1005.0000 | 12.9100 | 0.0145 | |
| (0.10%) | (0.92%) | (2.03%) | ||
| Dry matter | Observed GDDs | 134.7000 | 5.3270 | 0.0064 |
| Predicted GDDs | 134.7000 | 5.2650 | 0.0062 | |
| (0) | (1.16%) | (3.13%) |
| Growth Trait | Temperature Data | |||
|---|---|---|---|---|
| LAI | Observed GDDs | 1.9248 | 4.1142 | 0.0020 |
| Predicted GDDs | 1.8968 | 4.0918 | 0.0020 | |
| (1.45%) | (0.54%) | (0) | ||
| Fresh fruit weight | Observed GDDs | 1039.0000 | 2814.0000 | 0.0095 |
| Predicted GDDs | 1039.0000 | 2618.0000 | 0.0093 | |
| (0) | (6.97%) | (2.11%) | ||
| Dry matter | Observed GDDs | 164.2000 | 12.7900 | 0.0032 |
| Predicted GDDs | 164.7000 | 12.3200 | 0.0031 | |
| (0.30%) | (3.67%) | (3.13%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.-S.; Fang, S.-L.; Kang, L.; Chen, C.-C.; Yao, M.-H.; Kuo, B.-J. Combining Recurrent Neural Network and Sigmoid Growth Models for Short-Term Temperature Forecasting and Tomato Growth Prediction in a Plastic Greenhouse. Horticulturae 2024, 10, 230. https://doi.org/10.3390/horticulturae10030230
Lin Y-S, Fang S-L, Kang L, Chen C-C, Yao M-H, Kuo B-J. Combining Recurrent Neural Network and Sigmoid Growth Models for Short-Term Temperature Forecasting and Tomato Growth Prediction in a Plastic Greenhouse. Horticulturae. 2024; 10(3):230. https://doi.org/10.3390/horticulturae10030230
Chicago/Turabian StyleLin, Yi-Shan, Shih-Lun Fang, Le Kang, Chu-Chung Chen, Min-Hwi Yao, and Bo-Jein Kuo. 2024. "Combining Recurrent Neural Network and Sigmoid Growth Models for Short-Term Temperature Forecasting and Tomato Growth Prediction in a Plastic Greenhouse" Horticulturae 10, no. 3: 230. https://doi.org/10.3390/horticulturae10030230
APA StyleLin, Y.-S., Fang, S.-L., Kang, L., Chen, C.-C., Yao, M.-H., & Kuo, B.-J. (2024). Combining Recurrent Neural Network and Sigmoid Growth Models for Short-Term Temperature Forecasting and Tomato Growth Prediction in a Plastic Greenhouse. Horticulturae, 10(3), 230. https://doi.org/10.3390/horticulturae10030230