
Pressure Stabilization Strategies for a LES Filtering Reduced Order Model



Abstract
1. Introduction
2. The Full Order Model
2.1. The Evolve-Filter Algorithm
- -
- -
- Filter: find such thatwith boundary conditions
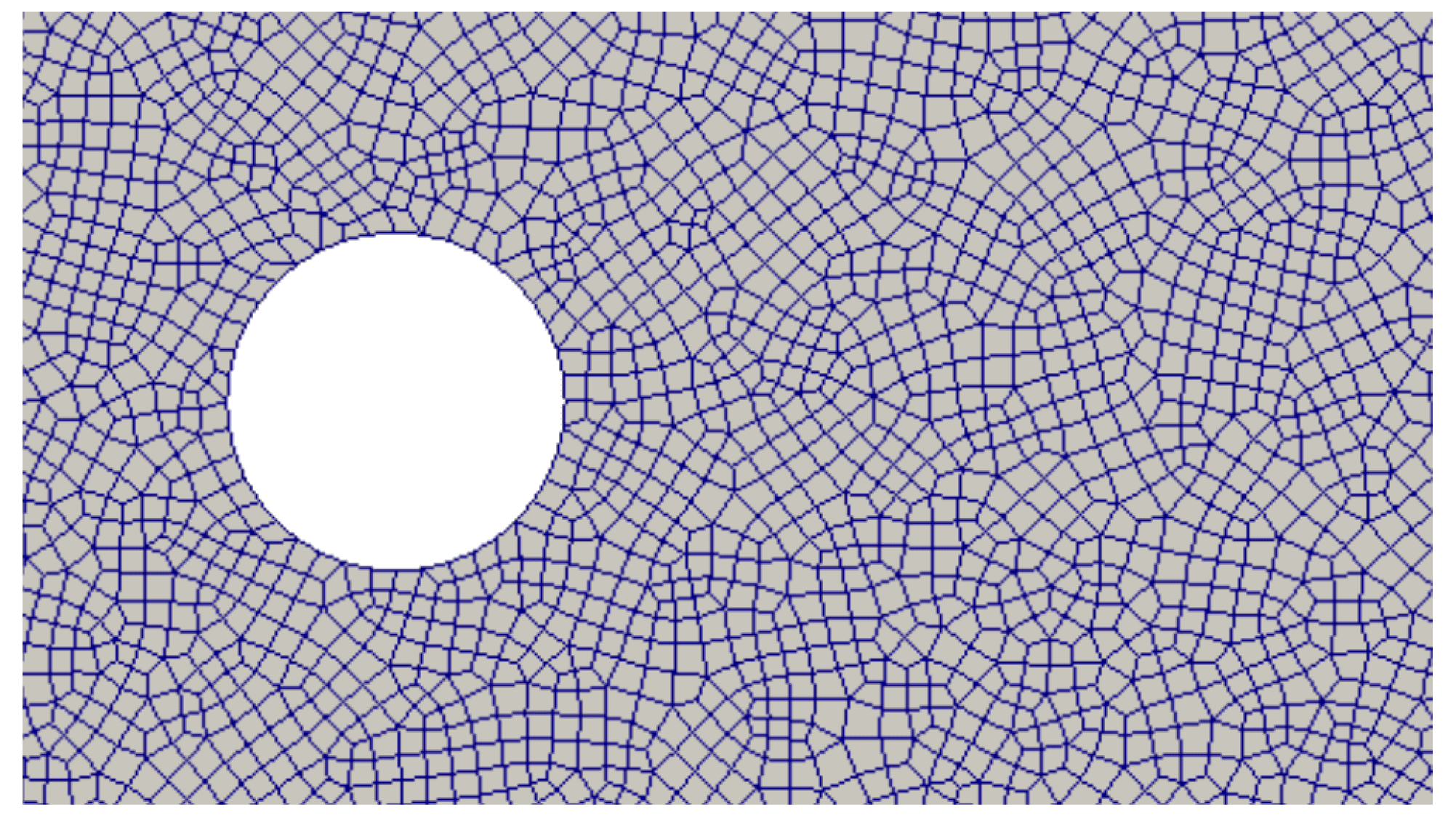
2.2. Space Discrete Problem by a Finite Volume Method
3. The Reduced Order Model
3.1. A POD–Galerkin Projection Method
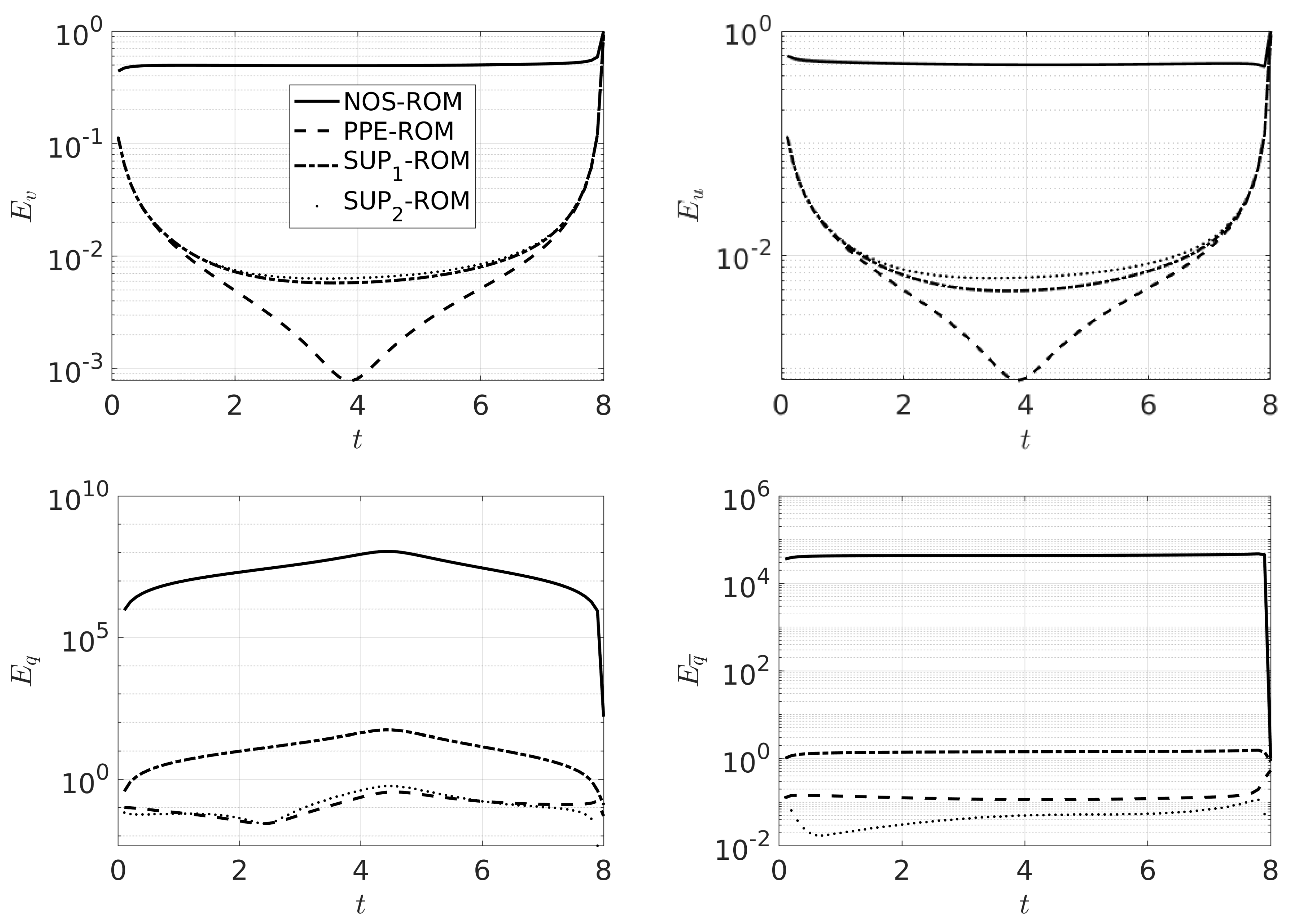
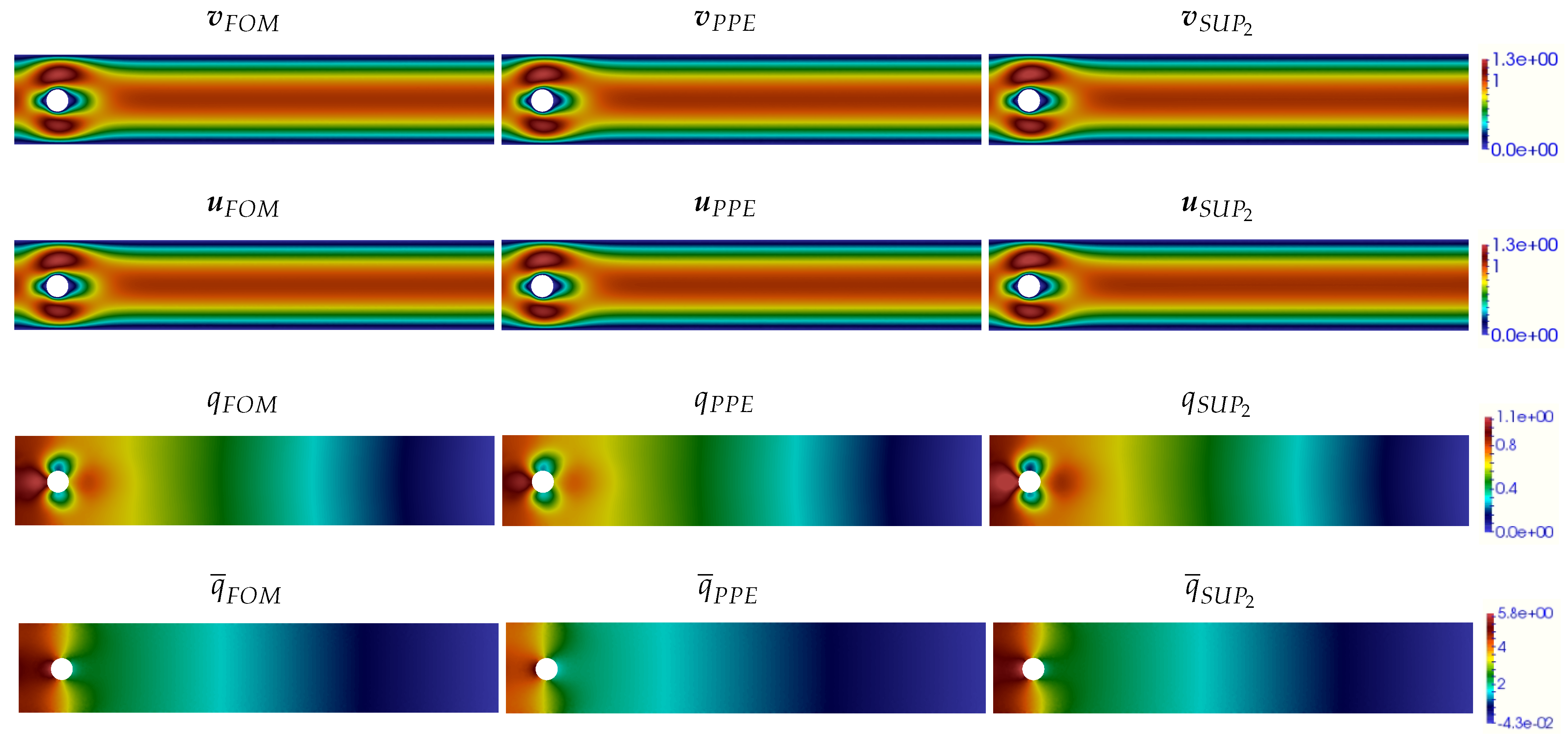
3.2. Pressure Fields Reconstruction and Pressure Stability
3.2.1. Pressure Poisson Equation Method
3.2.2. Supremizer Enrichment Method
3.3. Implementation of Dirichlet Boundary Conditions: The Lifting Function Method
4. Numerical Results
5. Conclusions and Future Perspectives
Author Contributions
Funding
Conflicts of Interest
References
- Hesthaven, J.S.; Rozza, G.; Stamm, B. Certified Reduced Basis Methods for Parametrized Partial Differential Equations; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Quarteroni, A.; Manzoni, A.; Negri, F. Reduced Basis Methods for Partial Differential Equations; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Benner, P.; Ohlberger, M.; Patera, A.; Rozza, G.; Urban, K. Model Reduction of Parametrized Systems, 1st ed.; MS&A Series; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Benner, P.; Gugercin, S.; Willcox, K. A Survey of Projection-Based Model Reduction Methods for Parametric Dynamical Systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Bader, E.; Kärcher, M.; Grepl, M.A.; Veroy, K. Certified Reduced Basis Methods for Parametrized Distributed Elliptic Optimal Control Problems with Control Constraints. SIAM J. Sci. Comput. 2016, 38, A3921–A3946. [Google Scholar] [CrossRef]
- Benner, P.; Schilders, W.; Grivet-Talocia, S.; Quarteroni, A.; Rozza, G.; Silveira, L.M. Model Order Reduction; De Gruyter: Berlin, Germany; Boston, MA, USA, 2020. [Google Scholar]
- Longatte, E.; Erwan, L.; Pomarede, M.; Sigrist, J.F.; Hamdouni, A. Parametric study of flow-induced vibrations in cylinder arrays under single-phase fluid cross flows using POD-ROM. J. Fluids Struct. 2018, 78, 314–330. [Google Scholar] [CrossRef]
- Shinde, V.; Longatte, E.; Baj, F.; Hoarau, Y.; Braza, M. A Galerkin-free model reduction approach for the Navier–Stokes equations. J. Comput. Phys. 2018, 309, 148–163. [Google Scholar] [CrossRef]
- Carlberg, K.; Farhat, C.; Cortial, J.; Amsallem, D. The GNAT method for nonlinear model reduction: Effective implementation and application to computational fluid dynamics and turbulent flows. J. Comput. Phys. 2013, 242, 623–647. [Google Scholar] [CrossRef]
- Moin, P.; Mahesh, K. Direct Numerical Simulation: A Tool in Turbulence Research. Annu. Rev. Fluid Mech. 1998, 30, 539–578. [Google Scholar] [CrossRef]
- Wang, Z.; Akhtar, I.; Borggaard, J.; Iliescu, T. Proper orthogonal decomposition closure models for turbulent flows: A numerical comparison. Comput. Methods Appl. Mech. Eng. 2012, 237–240, 10–26. [Google Scholar] [CrossRef]
- Aubry, N.; Holmes, P.; Lumley, J.L.; Stone, E. The dynamics of coherent structures in the wall region of a turbulent boundary layer. J. Fluid Mech. 1988, 192, 115–173. [Google Scholar] [CrossRef]
- Leray, J. Essai sur le mouvement d’un fluide visqueux emplissant l’espace. J. Mathématiques Pures Appliquées 1934, 63, 193–248. [Google Scholar]
- Bowers, A.; Rebholz, L. Numerical study of a regularization model for incompressible flow with deconvolution-based adaptive nonlinear filtering. Comput. Methods Appl. Mech. Eng. 2013, 258, 1–12. [Google Scholar] [CrossRef]
- Boyd, J.P. Two Comments on Filtering (Artificial Viscosity) for Chebyshev and Legendre Spectral and Spectral Element Methods: Preserving Boundary Conditions and Interpretation of the Filter as a Diffusion. J. Comput. Phys. 1998, 143, 283–288. [Google Scholar] [CrossRef]
- Fischer, P.; Mullen, J. Filter-based stabilization of spectral element methods. Comptes Rendus L’Academie Sci. Ser. I Math. 2001, 332, 265–270. [Google Scholar] [CrossRef]
- Dunca, A.; Epshteyn, Y. On the Stolz-Adams deconvolution model for the large-eddy simulation of turbulent flows. SIAM J. Math. Anal. 2005, 37, 1890–1902. [Google Scholar] [CrossRef]
- Layton, W.; Rebholz, L.; Trenchea, C. Modular Nonlinear Filter Stabilization of Methods for Higher Reynolds Numbers Flow. J. Math. Fluid Mech. 2012, 14, 325–354. [Google Scholar] [CrossRef]
- Girfoglio, M.; Quaini, A.; Rozza, G. A Finite Volume approximation of the Navier–Stokes equations with nonlinear filtering stabilization. Comput. Fluids 2019, 187, 27–45. [Google Scholar] [CrossRef]
- Girfoglio, M.; Quaini, A.; Rozza, G. Fluid–structure interaction simulations with a LES filtering approach in solids4Foam. Commun. Appl. Ind. Math. 2021. accepted. Available online: https://arxiv.org/abs/2102.08011 (accessed on 27 June 2021).
- Gunzburger, M.; Iliescu, T.; Schneier, M. A Leray regularized ensemble-proper orthogonal decomposition method for parameterized convection-dominated flows. IMA J. Numer. Anal. 2019, 40, 886–913. [Google Scholar] [CrossRef]
- Xie, X.; Wells, D.; Wang, Z.; Iliescu, T. Numerical analysis of the Leray reduced order model. J. Comput. Appl. Math. 2018, 328, 12–29. [Google Scholar] [CrossRef]
- Wells, D.; Wang, Z.; Xie, X.; Iliescu, T. An evolve-then-filter regularized reduced order model for convection-dominated flows. Int. J. Numer. Methods Fluids 2017, 84, 598–615. [Google Scholar] [CrossRef]
- Gunzburger, M.; Iliescu, T.; Mohebujjaman, M.; Schneier, M. An Evolve-Filter-Relax stabilized reduced order stochastic collocation method for the time-dependent Navier–Stokes equations. SIAM/ASA J. Uncertain. Quantif. 2019, 7, 1162–1184. [Google Scholar] [CrossRef]
- Xie, X.; Wells, D.; Wang, Z.; Iliescu, T. Approximate deconvolution reduced order modeling. Comput. Methods Appl. Mech. Eng. 2016, 313, 512–534. [Google Scholar] [CrossRef]
- Girfoglio, M.; Quaini, A.; Rozza, G. A POD-Galerkin reduced order model for a LES filtering approach. J. Comput. Phys. 2021, 436, 110260. [Google Scholar] [CrossRef]
- Girfoglio, M.; Quaini, A.; Rozza, G. A Hybrid Reduced Order Model for Nonlinear LES Filtering. Available online: https://arxiv.org/abs/2107.12933 (accessed on 27 June 2021).
- Akhtar, I.; Nayfeh, A.H.; Ribbens, C.J. On the stability and extension of reduced-order Galerkin models in incompressible flows. Theor. Comput. Fluid Dyn. 2009, 23, 213–237. [Google Scholar] [CrossRef]
- Stabile, G.; Rozza, G. Finite volume POD-Galerkin stabilised reduced order methods for the parametrised incompressible Navier–Stokes equations. Comput. Fluids 2018, 173, 273–284. [Google Scholar] [CrossRef]
- Isoz, M. POD-DEIM based model order reduction for speed-up of flow parametric studies. Ocean Eng. 2019, 186, 106083. [Google Scholar] [CrossRef]
- Rozza, G.; Veroy, K. On the stability of the reduced basis method for Stokes equations in parametrized domains. Comput. Methods Appl. Mech. Eng. 2007, 196, 1244–1260. [Google Scholar] [CrossRef]
- Ballarin, F.; Manzoni, A.; Quarteroni, A.; Rozza, G. Supremizer stabilization of POD-Galerkin approximation of parametrized steady incompressible Navier–Stokes equations. Int. J. Numer. Methods Eng. 2014, 102, 1136–1161. [Google Scholar] [CrossRef]
- Gerner, A.L.; Veroy, K. Certified Reduced Basis methods for parametrized saddle point problems. SIAM J. Sci. Comput. 2011, 34, A2812–A2836. [Google Scholar] [CrossRef]
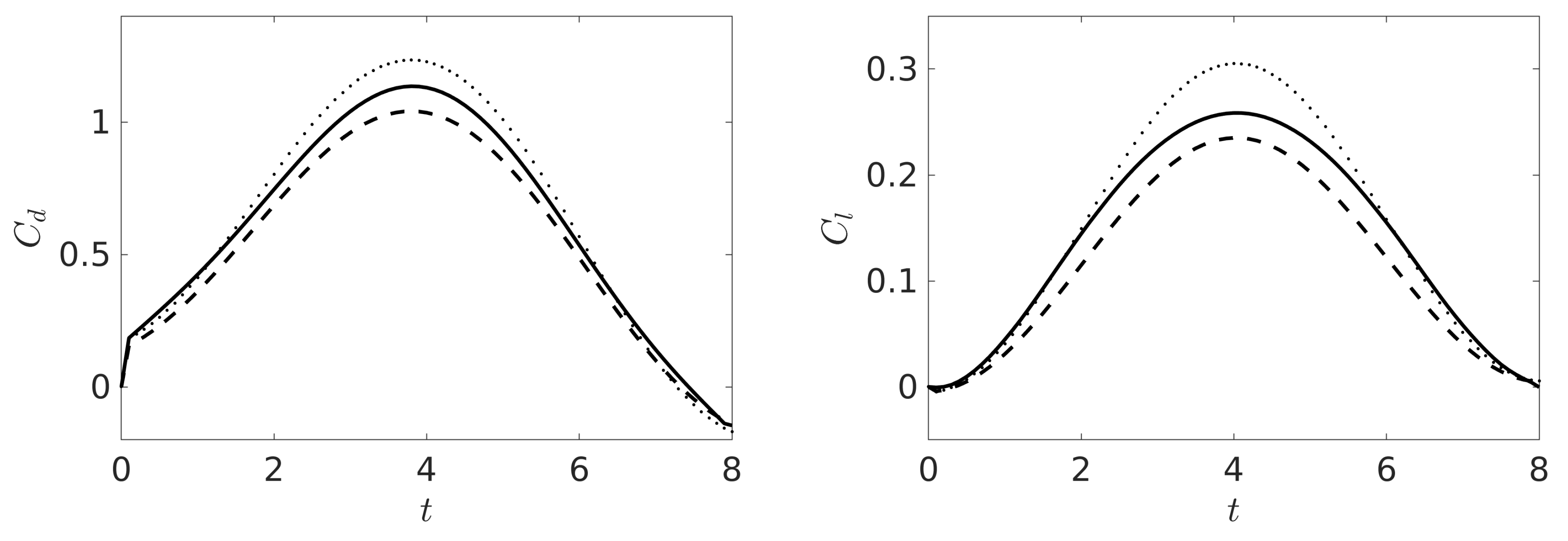
- Turek, S.; Schäfer, M. Benchmark computations of laminar flow around cylinder. In Flow Simulation with High-Performance Computers II; Hirschel, E., Ed.; Vieweg: Braunschweig, Germany; Wiesbaden, Germany, 1996; Volume 52. [Google Scholar]
- John, V. Reference values for drag and lift of a two dimensional time-dependent flow around a cylinder. Int. J. Numer. Methods Fluids 2004, 44, 777–788. [Google Scholar] [CrossRef]
- Bertagna, L.; Quaini, A.; Veneziani, A. Deconvolution-based nonlinear filtering for incompressible flows at moderately large Reynolds numbers. Int. J. Numer. Methods Fluids 2016, 81, 463–488. [Google Scholar] [CrossRef]
- Quarteroni, A.; Sacco, R.; Saleri, F. Numerical Mathematics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Weller, H.G.; Tabor, G.; Jasak, H.; Fureby, C. A tensorial approach to computational continuum mechanics using object-oriented techniques. Comput. Phys. 1998, 12, 620–631. [Google Scholar] [CrossRef]
- Issa, R.I. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Van Doormaal, J.P.; Raithby, G.D. Enhancements of the SIMPLE method for predicting incompressible fluid flows. Numer. Heat Transf. 1984, 7, 147–163. [Google Scholar] [CrossRef]
- Patankar, S.V.; Spalding, D.B. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]
- Stabile, G.; Rozza, G. ITHACA-FV—In Real Time Highly Advanced Computational Applications for Finite Volumes. Available online: https://mathlab.sissa.it/ithaca-fv (accessed on 30 January 2018).
- Rozza, G.; Huynh, D.B.P.; Patera, A.T. Reduced Basis approximation and a Posteriori error estimation for affinely parametrized elliptic coercive Partial Differential Equations. Arch. Comput. Methods Eng. 2008, 15, 229. [Google Scholar] [CrossRef]
- Chinesta, F.; Huerta, A.; Rozza, G.; Willcox, K. Model Order Reduction. In Encyclopedia of Computational Mechanics; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Kalashnikova, I.; Barone, M.F. On the stability and convergence of a Galerkin reduced order model (ROM) of compressible flow with solid wall and far-field boundary treatment. Int. J. Numer. Methods Eng. 2010, 83, 1345–1375. [Google Scholar] [CrossRef]
- Chinesta, F.; Ladeveze, P.; Cueto, E. A short review on Model Order Reduction based on Proper Generalized Decomposition. Arch. Comput. Methods Eng. 2011, 18, 395. [Google Scholar] [CrossRef]
- Dumon, A.; Allery, C.; Ammar, A. Proper General Decomposition (PGD) for the resolution of Navier–Stokes equations. J. Comput. Phys. 2011, 230, 1387–1407. [Google Scholar] [CrossRef][Green Version]
- Tsiolakis, V.; Giacomini, M.; Sevilla, R.; Othmer, C.; Huerta, A. Parametric Solutions of Turbulent Incompressible Flows in OpenFOAM via the Proper Generalised Decomposition. Available online: https://arxiv.org/abs/2006.07073 (accessed on 27 June 2021).
- Kunisch, K.; Volkwein, S. Galerkin proper orthogonal decomposition methods for a general equation in fluid dynamics. SIAM J. Numer. Anal. 2002, 40, 492–515. [Google Scholar] [CrossRef]
- Rozza, G. Reduced basis methods for Stokes equations in domains with non-affine parameter dependence. Comput. Vis. Sci. 2009, 12, 23–35. [Google Scholar] [CrossRef]
- Brezzi, F.; Bathe, K.J. A discourse on the stability conditions for mixed finite element formulations. Comput. Methods Appl. Mech. Eng. 1990, 82, 27–57. [Google Scholar] [CrossRef]
- Boffi, D.; Brezzi, F.; Fortin, M. Mixed Finite Element Methods and Applications, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Bergmann, M.; Bruneau, C.H.; Iollo, A. Enablers for robust POD models. J. Comput. Phys. 2009, 228, 516–538. [Google Scholar] [CrossRef]
- Lorenzi, S.; Cammi, A.; Luzzi, L.; Rozza, G. POD-Galerkin method for finite volume approximation of Navier–Stokes and RANS equations. Comput. Methods Appl. Mech. Eng. 2016, 311, 151–179. [Google Scholar] [CrossRef]
- Orszag, S.A.; Israeli, M.; Deville, M. Boundary conditions for incompressible flows. J. Sci. Comput. 1986, 1, 75–111. [Google Scholar] [CrossRef]
- Johnston, H.; Liu, J.G. Accurate, stable and efficient Navier–Stokes solvers based on explicit treatment of the pressure term. J. Comput. Phys. 2004, 199, 221–259. [Google Scholar] [CrossRef]
- Li, L. A split-step finite-element method for incompressible Navier–Stokes equations with high-order accuracy up-to the boundary. J. Comput. Phys. 2020, 408, 213–237. [Google Scholar] [CrossRef]
- Lax, P.; Wendroff, B. System of conservation laws. Commun. Pure Appl. Math. 1960, 13, 217–237. [Google Scholar] [CrossRef]
- Stabile, G.; Zancanaro, M.; Rozza, G. Efficient Geometrical parametrization for finite-volume based reduced order methods. Int. J. Numer. Methods Eng. 2020, 121, 2655–2682. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N Modes | u | v | q | s | ||
|---|---|---|---|---|---|---|
| 1 | 0.999588 | 0.999582 | 0.967431 | 0.999985 | 0.736795 | 0.999899 |
| 2 | 0.999924 | 0.999924 | 0.999916 | 0.999997 | 0.999594 | 0.999986 |
| 3 | 0.999998 | 0.999998 | 0.999995 | 0.999999 | 0.999977 | 0.999999 |
| 4 | 0.999999 | 0.999999 | 0.999998 | 0.999995 | 0.999988 | 0.999999 |
| v (PPE) | v () | u (PPE) | u () | q (PPE) | q () | (PPE) | () | |
|---|---|---|---|---|---|---|---|---|
| Maximum | ||||||||
| Average | ||||||||
| Minimum |
| PPE-ROM | 0.088 | 0.144 |
| -ROM | 0.086 | 0.139 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Girfoglio, M.; Quaini, A.; Rozza, G. Pressure Stabilization Strategies for a LES Filtering Reduced Order Model. Fluids 2021, 6, 302. https://doi.org/10.3390/fluids6090302
Girfoglio M, Quaini A, Rozza G. Pressure Stabilization Strategies for a LES Filtering Reduced Order Model. Fluids. 2021; 6(9):302. https://doi.org/10.3390/fluids6090302
Chicago/Turabian StyleGirfoglio, Michele, Annalisa Quaini, and Gianluigi Rozza. 2021. "Pressure Stabilization Strategies for a LES Filtering Reduced Order Model" Fluids 6, no. 9: 302. https://doi.org/10.3390/fluids6090302
APA StyleGirfoglio, M., Quaini, A., & Rozza, G. (2021). Pressure Stabilization Strategies for a LES Filtering Reduced Order Model. Fluids, 6(9), 302. https://doi.org/10.3390/fluids6090302